
Abstract
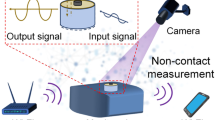
Vibration isolation systems frequently face challenges in varying environments due to their inherent resonance effects and responsive delays. Here, we report an intelligent excitation-adaptative vibration isolation (IEA-VI) architecture that mimics the biological adaptive mechanism of human muscle, enabling real-time stiffness adjustment to mitigate variable environmental impacts through sensing, processing, and controlling modules. The IEA-VI system operates in high-static-low-dynamic-stiffness and high-dynamic-stiffness modes, capable of intelligent on-demand mode switching. We develop a real-time frequency perception algorithm to quickly perceive excitation frequencies, enabling the system to perform rapid mode-switching and thus achieve real-time full-spectrum vibration control. We design and fabricate a proof-of-concept IEA-VI system and theoretically and experimentally demonstrate that the system’s frequency perception is approximately 10 times faster than that achieved with the commonly used Fast Fourier Transform at low frequencies. Meanwhile, the system effectively mitigates resonance and delivers high-performance vibration isolation through intelligent real-time mode switching.
Similar content being viewed by others
Introduction
Organisms with well-developed motor systems1,2, such as mammals, reptiles, birds, and fish, demonstrate exceptional adaptability to varying environments3,4, maintaining optimal movement and stability through a coordinated effort of sensory units5, the central nervous system6, and the musculoskeletal system7. For example, mammals adjust their muscle contractions to respond to environmental changes, protecting their bodies from stress and injury. In these organisms, mechanoreceptors continuously capture environmental information, which guides the central nervous system’s decision-making. Consequently, muscle contraction intensity and stiffness are precisely regulated to meet diverse physiological and environmental demands. The mechanical nature of this protective principle in biological systems resembles that of vibration isolators, which are frequently applied for protecting high-precision equipment in fields such as aviation8, aerospace9, mechanical engineering10, and physical science11. However, biological systems possess the additional capability of intelligent regulation, a feature currently lacking in vibration isolators.
Traditional methods for isolating vibrations are generally classified into three categories: active, passive, and semi-active12. Active vibration isolation (AVI) stands out for its ability to sense and rapidly counteract unwanted vibrations in real time via inputting energy, offering precise and effective isolation. This capability has made the AVI indispensable in critical industries such as aerospace and precision manufacturing13,14,15. However, AVI systems are often costly and bulky due to continuous energy consumption and the requirement for high-precision components, such as sensors, actuators, and controllers12. Moreover, their development and deployment pose challenges involving the need for accurate dynamical models16, robust control algorithms17, ensuring system stability18, addressing processing delays19, and handling high-frequency or nonlinear vibrations20. In comparison, passive vibration isolation (PVI) systems12,21,22, constructed with components providing inertial, elastic, and damping forces, offer straightforward solutions to the limitations of AVI systems. However, a PVI system inherently has a fixed performance involving a limited bandwidth once installed. In other frequency ranges, it either fails to work or amplifies vibrations (e.g., resonance)23,24. Therefore, mitigation of adverse performance across the entire spectrum has long been a goal pursued by both academia and industry alike25,26,27,28.
Semi-active vibration isolation (SVI), primarily based on PVI and aimed at harmoniously integrating the strengths of AVI, is a potential solution and provides enhanced performance and frequency adaptability12,29. A SVI system features the capability of switching and maintaining its dynamical properties, including the stiffness, damping, and even mass of specific components, to suit frequency-varying environmental conditions using trivial energy input. This feature not only reduces energy consumption compared to AVI systems but also ensures effective and stable vibration control30. Furthermore, the switching inherently leads to changes in the system’s working bandwidth and vibration control capability, thus enabling SVI to achieve superior frequency adaptability and optimized vibration control than PVI. With the aid of magnetorheological31, electrorheological32, and variable orifice dampers33, a SVI system is capable of achieving high damping at low frequencies and low damping at high frequencies, effectively controlling vibrations across the entire spectrum34. By using variable structures with multiple stiffness modes based on origami35, electromagnetic23,36, piezoelectric mechanisms37, dielectric elastomers38,39, etc., SVI systems are capable of achieving on-demand stiffness configuration, enabling an enhanced working bandwidth with optimized vibration transmissibility. Meanwhile, bio-inspired SVI systems integrate bionic structural designs with actuators, capable of adjusting key parameters such as stiffness and damping38,40,41. This integration enhances the system’s inherent adaptability, allowing for effective vibration control. For instance, Zhao et al.38 employed dielectric elastomers as variable stiffness elements in a limb-like configuration, reducing vibration transmission between a satellite’s capture mechanism and its platform. However, due to the lack of autonomy, current SVI systems fail to adapt independently to practical environments and thus require manual intervention. This issue remains a significant and exceptional challenge that has persisted since the inception of SVI, representing a major obstacle to its further advancement. Additionally, the autonomy requires real-time frequency-perceiving capability, but the incumbent frequency-perception algorithms using fast Fourier transform (FFT)42, phase-locked loop43, frequency-locked loop44, and their variants45, generally cause issues of response delay46 in low-frequency ranges. Therefore, it is promising to integrate the advantages of SVI systems with real-time frequency-perception algorithms to develop an autonomous system for achieving advanced vibration control across the full spectrum.
Inspired by the environmental adaptive mechanisms in biological systems, we propose an intelligent excitation-adaptive (IEA) design philosophy to maintain optimal vibration control performance in response to varying environmental frequencies. We design an IEA vibration isolation (IEA-VI) system incorporating a stiffness-adjustable structure, a real-time excitation frequency perception approach, and an intelligent stiffness switching strategy. Analogous to the human body, the developed architecture is characterized by accurately perceiving external vibrations and responding in real time, offering comprehensive vibration control across all frequencies while featuring structural and algorithmic simplicity. We develop a proof-of-concept stiffness-adjustable structure for the system, which only consists of a nesting-type electromagnetic device in parallel with a linear spring. Its stiffness adjustment is realized by altering the magnitude and direction of the current in the electromagnetic device. The frequency-perception approach combines the benefits of employing FFT for identifying high frequencies with those of a model-based approach, particularly suitable for perceiving low frequencies. Based on the real-time frequency inputs, the dynamic stiffness switching strategy promptly adjusts the system between high and low stiffness settings to optimize vibration control across the full spectrum. We comprehensively introduce the dynamical design principle of an IEA-VI system and experimentally demonstrate the vibration control performance of the IEA-VI system under varying excitations.
Results
Design philosophy of the IEA-VI
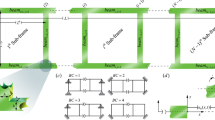
A passive vibration isolator is a device that supports an object while using its own elastic and damping components to absorb as much of the externally transmitted energy as possible, thereby reducing the energy transfer between the external source and the supported object and achieving vibration control. Due to their simple, systematic architectures and stable performance, PVIs are widely applied to protect complex and high-precision devices or systems from vibration and noise47. Traditional PVI systems are designed based on the linear vibration isolation (VI) theory21, in which vibrations are only isolated when the excitation frequency exceeds \(\sqrt{2}\) times the natural frequencies of the systems (see Fig. 1A-I). This inherent characteristic leads to a contradiction between the working bandwidth and the load capacity of the PVI system. To widen the working bandwidth, it is common practice to either reduce the stiffness of the system or increase the mass of the isolated object48, but causing increase in space and weight requirements and thus restricting their practical applications. High-static-low-dynamic-stiffness (HSLDS) vibration isolators initially alleviate the limitations (see Fig. 1A-II) by introducing negative stiffness structures but inherit the resonance characteristic from linear vibration isolators outside their designed working frequency range24,49. To further widen the working bandwidth, quasi-zero-stiffness (QZS) isolation systems whose stiffnesses are tuned to approach zero during fixed displacement ranges have been extensively introduced (see Fig. 1A-III). However, they commonly require balanced auxiliary in practical applications and are prone to exhibiting stronger resonance effects outside their working frequency range50,51. Consequently, the existing PVI systems inevitably have a vibration-amplified frequency range around resonance due to their inherent dynamical characteristics, despite efforts to optimize for ultra-low frequencies52,53. This amplification poses a potential threat to the supported object, especially under varying excitation frequencies. Although conceptually, SVI addresses this threat, the real achievement requires it to possess intelligently excitation-adaptive (IEA) capabilities in real time (see Fig. 1A-IV) to switch the stiffness of the system between HSLDS and high dynamic stiffness (HDS). This is currently the primary challenge hindering the advancement of VI technology.

A Comparison of the traditional passive vibration isolation (PVI) systems with different working mechanisms. The current mainstream PVI approaches, employing linear, high-static-low-dynamic-stiffness (HSLDS), and quasi-zero-stiffness (QZS) isolators, practically suffer from vibration amplification or resonance issues in their non-working spectra. In comparison, the proposed IEA-VI system can mitigate the resonance issues while maintaining the advantages of the current PVI approaches, thus achieving full-spectrum vibration control. B The biological mechanism of excitation adaptation in the human body. C Nature of the human’s intelligently adaptive system. When the fast-adapting (FA) mechanoreceptor in the skin senses a vibratory stimulus, they transmit this information to the brain via the peripheral nervous system in real time. The brain then interprets, recognizes, and makes decisions about the appropriate response, and instructs the muscles to adjust their contraction conditions. This enables the body to effectively adapt to variable stimuli. D Working mechanism of an IEA-VI system. Analogous to the human body, the system is capable of sensing the vibration responses and perceiving the excitation frequency. Based on the perceived frequency, the system intelligently switches to either HSLDS or high-dynamic-stiffness (HDS) mode to realize optimal VI performance. E Schematic of the IEA-VI system’s performance under frequency-varying excitations.
Long-term natural selection endows humans with an inherited adaptation to various environmental shocks and vibrations when moving, thus ensuring the stability and coordination of the body in an optimal state (see Fig. 1B) and the safety of key parts (e.g., head, heart, leg)54,55. This adaptation particularly operates through an intelligent mechanism involving sensing, processing, and controlling (see Fig. 1C). When the skin detects external stimuli (vibrations), the fast-adapting cutaneous mechanoreceptors inside soft tissues respond to bring nonconductive potential changes56,57. The signals are then transmitted via the peripheral nervous system to the brain, where the information is interpreted in real time to guide appropriate decisions58,59. Subsequently, the brain sends signals to muscles to regulate their contraction strength (stiffness) for effectively isolating vibrations from stimuli (vibrations) of variable frequencies (e.g., movements at different speeds). This intelligent vibration control strategy discovered in biological systems presents a promising mechanism for advancing artificial control techniques.
Herein, inspired by the biological mechanism of excitation adaptation, we introduce a mechatronic IEA architecture for optimal vibration control under frequency-varying excitations. Analogous to the human nervous system, the architecture consists of sensing, processing, and controlling modules integrated with a VI structure featuring generalized adjustable stiffness (see Fig. 1D). The system only operates in two modes, i.e., HSLDS mode and HDS mode. Upon initial detection of the excitation frequency from sensed signals, the control module autonomously activates real-time stiffness switching of the vibration isolator between both modes to optimize performance (see Fig. 1E). This design philosophy mitigates inherent vibration amplification of traditional high-performance PVIs (e.g., HSLDS and QZS structures) at low frequency ranges while maintaining high-performance VI across the remaining frequency range.
Working principle of an IEA-VI system
We develop a proof-of-concept IEA-VI system to demonstrate the feasibility of the proposed design philosophy and study the implementation challenges. This system fully mimics the human IEA mechanism, comprising several components: a vibration isolator (representing the human leg) constructed with a linear spring and an electromagnetic stiffness regulator (acting as the muscle) in parallel, a payload (representing the body), a sensor (functioning as the skin), a current controller (functioning as the nerve center) and a processor (functioning as the brain). The working principle of the IEA-VI system can be elucidated in three steps: (1) when the system is excited, the sensor on the payload detects the vibration and transmits the signals to the processor; (2) The processor analyzes these signals to recognize the characteristics of the external excitation and intelligently formulates a strategy and then instructs the current controller; (3) Once receiving the instruction from the processor, the current controller switches or maintains the input to regulate the dynamic stiffness of the vibration isolator, thus achieving intelligent adaptability to excitation for the system.
In the IEA-VI system, the foremost core component is the vibration isolator with adjustable stiffness (see Fig. 2A). Its load-bearing capacity is provided by a linear spring, while its stiffness regulator is a nesting-type electromagnetic appliance composed of six ring permanent magnets (PMs) and six copper coil windings (CWs). When the center planes of the PMs and CWs coincide along the X-axis, the vibration isolator reaches its equilibrium position (see Supplementary Fig. S1). By applying a current to the CWs, a corresponding stiffness is added for the system in real time, where both the intensity and the direction of the current have effects on the stiffness (see Supplementary Note S1). Since the dynamic stiffness of the vibration isolator solely results from the stiffness regulator, the real-time stiffness switching is easily achieved by adjusting the applied current in the CWs. By setting a clockwise (+) or counterclockwise (−) current with a fixed intensity, respectively, a HSLDS or HDS mode of the system is enabled. Owing to the nesting-type layout, the vibration isolator with adjustable stiffness has the metrics of compactness, high load-carrying capacity, and ease of real-time stiffness adjustment.

A Architecture of an IEA-VI system. Clockwise (+) and counterclockwise (−) currents in the coil windings (CWs) correspond to the HSLDS and HDS modes of the vibration isolator, respectively. B Simulated stiffness-displacement curves of the linear spring and the electromagnetic stiffness regulator with different currents in the CWs. The colored quasi-linear stiffness-displacement curves of the electromagnetic stiffness regulator indicate a minimal nonlinear dynamical characteristic of the vibration isolator. C Simulated restoring force-displacement curves of the vibration isolator with different currents in the CWs. D Simulated displacement transmissibility of the vibration isolator with different currents in the CWs.
To achieve optimal performance of the IEA-VI system, we first theoretically studied the statics of the system when the current (I) through the CWs is different. We simulated the stiffness-displacement curves generated by the electromagnetic stiffness regulator (see Fig. 2B) and the combined force-displacement curves with the contribution of the linear spring (see Fig. 2C), when I ranges from −2 to +2 A (see Supplementary Note S1 for the model). Within a ±5 mm displacement range, the stiffness (i.e., the derivative of the electromagnetic force) provided by the controller is approximately linear, where the maximum stiffness occurs at zero displacement and varies significantly from +3220 to −3220 N/m as I changes from −2 to +2 A, accordingly. This indicates that the IEA-VI system is quasi-linear and its dynamic response is simple for analysis. If the stiffness of the linear spring is set around +3220 N/m, the combined stiffness of the system is high-static-low-dynamic when I = −2 A and significantly high when I = 2 A (see Fig. 2C). As a result, the resonance frequencies in the system’s transmissibility-frequency curves are different for both current settings. This configuration enables high vibration control performance in the low-frequency range when I = −2 A and broad VI across the remaining frequency range when I = 2 A.
To illustrate, we simulated the system’s displacement transmissibility-frequency curves under a displacement excitation with an amplitude of 0.5 mm (see Fig. 2D and Supplementary Note S1 for the model) in different current settings. As the current gradually decreases from 2 to −2 A, the resonance peak shifts towards the high-frequency domain and the transmissibility in the low-frequency domain approaches zero. If an applied current of −2 A represents that the vibration isolator works in HDS mode, there is an intersection (point Q), corresponding to the frequency fQ (2.7 Hz in the simulation), of the transmissibility curves for the HSLDS and HDS modes. Then, an optimal transmissibility curve, which takes the curve of HDS mode for frequencies below fQ and the curve of HSLDS mode for frequencies above fQ, is obtained. Based on the results, we propose a control strategy (see Supplementary Fig. S2): once the excitation frequency exceeds a threshold value fQ (2.7 Hz in the simulation), where the vibration of the system in HDS mode (corresponding to −2 A) becomes more intense than that in HSLDS mode, the system switches to HSLDS mode (corresponding to 2 A); Otherwise, it remains in HDS mode.
Intelligent frequency-perception strategy over the full frequency spectrum
High-precision real-time perception of excitation frequency is one of the most crucial capabilities to achieve fully autonomous IEA-VI. Traditional frequency perceptions are mainly based on the FFT algorithm42. It is capable of converting sampled time-history signals into frequency-domain signals (see Fig. 3A) and is frequently applied, featuring low computational effort, simplicity, and high effectiveness. However, the required sampling duration of a time-history signal (1/fi) for accurately identifying its frequency often increases as the frequency decreases (see Fig. 3B). Additionally, to ensure precision, the practical duration of the time-history signal is often set to be longer than the maximum 1/fi of the signal. These requirements ultimately make FFT time-consuming in low-frequency domains. The lower the frequency, the longer the required sampling duration (see Fig. 3C). As a result, the time employing traditional FFT-based solutions generally persists for hundreds of microseconds or even longer (see Fig. 3B) at ultra-low frequencies, thus causing high delay and inadequacy for real-time perception.

A Traditional frequency identification approach based on the fast Fourier transform (FFT) algorithm. B Curve of sampling duration vs. signal frequency when using FFT. C Results of identifying signals with different frequencies using the FFT-based method. D The system in HDS mode. E Displacement time histories when the system works in HDS mode under a frequency-varying harmonic excitation with a displacement amplitude of 0.5 mm. F The actual frequency time history of the excitation in Fig. 3E and that obtained using the proposed approach. G The system in HSLDS mode. H Displacement time histories when the system works in HSLDS mode under a frequency-varying harmonic excitation with a displacement amplitude of 0.5 mm. I The actual frequency time history of the excitation in Fig. 3H and that obtained using the proposed approach. Similar results to the HDS case are observed. The time consumption using the proposed approach is only around 10% of that using the FFT-based method in the low-frequency domain.
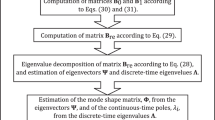
Here, we introduce an approach for accurately perceiving the low frequencies of excitation in real time using displacement responses of the payload, which is particularly useful in frequency-varying environments. Firstly, an accurate dynamical model of the system is necessary. Herein, the equation of motion (see Supplementary Note S2) for the vertical deflection (x) of the payload mass (m) is established as
where c, k1, k3, Xb, and ωb are, respectively, the system’s equivalent viscous damping coefficient, the equivalent linear stiffness, the equivalent cubic nonlinear stiffness, and the amplitude and circular frequency of the excitation. By inputting the precise parameter values of the system and the measured displacement response (x), the excitation frequency can be quickly obtained by solving Eq. (1). Then, via a series of deduction processes (see Supplementary Note S4), the relationship between the excitation frequency \(\hat{f}\) and the measured displacement response (x) is expressed by
where e and γ are the parameters representing the natural constant and the filtering gain, while ξ4, η4, and Δt0 are the variables (see Supplementary Note S4), with ξ4 and η4 involving the payload’s displacement and Δt0 representing the duration for the calculation from the starting moment (t0) to the present moment (t). Their expressions are given by
Equation (2) explicitly details the method for predicting the excitation frequency within a very short time interval.
To verify the effectiveness of the proposed frequency-perception approach, we first simulated the performance of the designed IEA-VI system in both HDS mode (see Fig. 3D–F) and HSLDS mode (see Fig. 3G–I), under a frequency-varying harmonic excitation with a fixed displacement amplitude of 0.5 mm. In the simulation, the representative vibration frequencies were selected as 2, 25, and 15 Hz, varying sequentially every 0.5 s. It should be noted that the proposed approach remains effective even for inputs with time-varying amplitudes (see Supplementary Fig. S3). Comparisons of displacement time histories (see Fig. 3E, H) and frequency time histories (see Fig. 3F, I) between the proposed approach and the FFT-based method for both HDS and the HSLDS systems reveal that the variations of excitation frequencies are accurately identified within 50 ms (min. to 28 ms). These results highlight the high efficiency of the proposed approach, with computational times (50/28/50 ms) approximately 1/10 to 1/5 that of FFT (500/254/258 ms) at the same frequencies. Furthermore, the proposed approach successfully handles transient responses (see Fig. 3E, H) and remains robust against minor noise (see Supplementary Fig. S4) throughout the vibration process and works under their effects, demonstrating strong stability. It is noteworthy that the proposed excitation frequency perception approach relies on the system’s dynamic model, indicating that its accuracy is directly influenced by the precision of the system’s mass, stiffness, and damping parameters (see Supplementary Fig. S5). Various methods60,61 have been developed for system parameter identification, which can enhance and support the advancement and application of our proposed identification method.
However, the proposed approach is not consistently performed efficiently across the entire frequency spectrum. As the excitation frequency increases, the time required by the proposed approach also increases (see Supplementary Fig. S6). There exists a threshold excitation frequency beyond which the FFT-based method outperforms the proposed approach. The proposed model-based frequency perception method exhibits less frequency-dependent convergence time compared to the FFT algorithm, as it relies on dynamic inversion rather than signal periodicity. In contrast, FFT-based methods benefit from shorter required sampling windows at higher frequencies, leading to better efficiency in that regime. This distinction explains the observed crossover in performance. Therefore, an intelligent frequency-perception strategy (see Supplementary Fig. S7), integrating the proposed frequency-perception approach and FFT-based method to capture the fastest obtained result, was adopted in the subsequent studies. This knowledge-based strategy ensures optimal performance by leveraging the strengths of each approach: the proposed approach excels in low to mid-frequency ranges, while FFT is advantageous in high-frequency scenarios.
Based on the intelligent frequency-perception strategy, we simulated the performance of the IEA-VI system (see “Methods” for the simulation setup) in three modes: HSLDS mode, HDS mode, and IEA mode, under a more variable excitation (see Fig. 4A). First, the frequency-perception results for the IEA-VI system well demonstrate high precision and efficiency (see Fig. 4B). For different frequency hops, the perception time varies but remains consistently under 203 ms without transient effects. The time histories of the perceived frequency exactly match the input counterparts. Meanwhile, the current in the CWs, as well as the operating mode, are intelligently switched with the aid of the comparison of the perceived frequency with fQ (see Fig. 4C). Then, by comparing the displacement time histories across the three modes, we found that the steady-state displacement responses of the IEA-VI system in IEA mode are the smallest (see Fig. 4D and Supplementary Fig. S8). The displacement amplitude is reduced by up to 49.7% at 1.8 Hz compared to the HSLDS mode, and 98.4% at 9 Hz compared to the HDS mode. This result aligns with the findings in Fig. 2D and indicates that the IEA-VI system reduces vibrations across both low-frequency and high-frequency ranges.

A Displacement time history of a harmonic excitation. The excitation amplitude is maintained at 0.5 mm for all cases, with its frequency varying every 2 s. B The actual frequency time history of the excitation in Fig. 4A and that perceived by the IEA-VI system. The result well indicates that the system is capable of accurately perceiving the excitation frequency in real time and is unaffected by the transient responses. C Intelligent stiffness regulation results. The IEA-VI system automatically and promptly switches between HSLDS (2 A current) and HDS (−2 A current) modes depending on the comparison between the perceived frequency and the threshold frequency fQ that is 2.7 Hz in this simulation (see Fig. 2D). D Comparison of the displacement time histories obtained when the system works in HSLDS, HDS, and IEA modes, respectively. The system in IEA mode clearly shows superiority compared to those in HSLDS and HDS modes across all frequencies.
Experimental demonstrations of the IEA-VI system
To further evaluate the vibration control performance of the proposed IEA-VI, we developed an experimental platform (see Fig. 5A) and fabricated a prototype of the IEA-VI system (see Fig. 5B and “Methods” for experimental details). The stiffness of the linear spring (k) and the damping coefficient (c) of the vibration isolator were respectively tested to be 3639.6 N/m and 35 N·s/m. In HSLDS mode, the current (I) in the CWs is 1.2 A and the added stiffness (kE) is −2332.9 N/m, while in HDS mode, I = −1.2 A and kE = 2332.9 N/m. Other geometric parameters and physical properties of the prototype are detailed in Supplementary Table S1.

A Experimental platform and devices for vibration tests of the IEA-VI system. B Prototype of the vibration isolator. C Experimental and simulation results of the displacement transmissibility when the prototype respectively worked in HSLDS, HDS, and IEA modes under frequency-varying excitations. The results well validate the developed model and also demonstrate that the prototype, either in HSLDS or HDS mode, representing the traditional passive vibration isolators, suffers from severe resonance issues. However, the prototype in IEA mode largely mitigates resonance while maintaining the high performance of the prototype in HSLDS mode. D Comparison of the displacement responses among the prototypes in the three modes.
Initially, we respectively tested the prototype in HDS and HSLDS modes under harmonic excitations with a fixed acceleration amplitude of a0 = 0.2 g and varying frequencies ranging from 1 to 30 Hz. By comparing the transmissibility values of the steady-state displacement responses in both modes (see Fig. 5C), it is clear that the IEA-VI system in HDS (around 5 Hz) or HSLDS (around 12 Hz) mode exhibits resonance frequency domains, with the transmissibility values converging around 7.1 Hz. Then, we set fQ = 7.1 Hz and tested the prototype in IEA mode under the same excitation as before. The result of the displacement transmissibility (see Fig. 5C) well demonstrates that the system in IEA mode has a better vibration control performance across the entire frequency range in comparison with the system in HDS or HSLDS mode. To further illustrate the performance, we used the image-tracking method to visualize the vibration control performance of the system for intuitive comparison (see Fig. 5D). The results clearly show that the vibrations of the system in IEA mode around 4.5 Hz (1.33 dB) and 12 Hz (−4.25 dB) are lower than those in HSLDS (3.24 dB) and HDS (8.17 dB) modes at the corresponding frequencies. Since the system in HSLDS or HDS mode represents the traditional passive vibration isolators, the superior vibration control performance of the IEA-VI system is thus clearly demonstrated. Furthermore, the IEA-VI system consumes less energy compared to AVI (see Supplementary Note S5).
Furthermore, since we found that the prototype has a large damping and its vibration control performance is far lower than that shown in Fig. 2D, we also theoretically studied the transmissibility curves of the system in the three modes using the developed model under different damping coefficients. Firstly, the simulation results align with the experimental results (see Fig. 5C) when the damping coefficient is set to 35 N·s/m, validating the developed model and ensuring the reliability of the previous and following simulation results. Note that this value of the damping coefficient indicates a large damping effect on the system. Then, based on the validated model, we analyzed the effect of damping on the system (see Supplementary Fig. S9) and found that the vibration control performance in Fig. 5C has substantial potential to be improved considerably by reducing damping. This is because high damping effectively mitigates the effects of resonance on the system but results in high transmissibility across the VI frequency range. In contrast, low damping ensures low transmissibility but severe resonance. In engineering practice, there is often a trade-off between high-performance VI and low resonance hazards. However, since the IEA-VI system always switches to the optimal mode after perceiving the excitation frequency to avoid the occurrence of resonance, lower damping is preferred to enhance its overall performance. Additionally, we also found that a proper increase of the input current in the CWs enhances the vibration control performance (see Supplementary Fig. S9). In HSLDS mode, this increase causes the transmissibility-frequency curve of the system to shift towards low frequencies, broadening the VI bandwidth. In HDS mode, on the other hand, it causes the curve to shift towards high frequencies, reducing vibrations at low frequencies.
Next, we carried out a comparative experiment to highlight the excitation-adaptive capability of the IEA-VI system and its optimal performance compared to traditional vibration isolators (see Fig. 6A and Supplementary Movie S1). We first tested the prototype in the three modes under a harmonic displacement excitation with varying amplitudes and frequencies (see Fig. 6B). Then, by comparing the time histories of the excitation frequency and the perceived frequency (see Fig. 6B) by the system in IEA mode, we found that the proposed frequency-perceiving approach is indeed fast (within tens of milliseconds) with high accuracy. Additionally, we found that the controller succeeded in intelligently switching the currents in the CWs (see Fig. 6C) in real time, thus making the vibrations of the system in IEA mode suppressed in comparison with those in HDS or HSLDS mode (see Fig. 6D). At 4.5 Hz, the displacement amplitude in IEA mode is 22.0% lower than that in HSLDS mode, while at 10 Hz and 12 Hz, the amplitudes are 65.6% and 77.4% lower than those in HDS mode, respectively (see Fig. 6E and Supplementary Fig. S10). More importantly, due to the system’s linearized stiffness, the vibration only increased linearly with the excitation. This indicates its superior excitation adaptability again, since systems with nonlinear characteristics can exhibit a greater rate of increase in vibration62. These findings well demonstrate the success of developing the IEA-VI system and highlight the promising potential of the IEA-VI for efficient vibration control in complex and variable environments.

A Screenshot of Supplementary Movie S1 for demonstrating the performance of the IEA-VI. The vibration isolation system was tested respectively in HDS, IEA, and HSLDS modes under the same condition. B Measured displacement time history of the shaker platform in the test. C The actual frequency time history of the excitation in Fig. 6A and that perceived by the IEA-VI system. The variation of the excitation frequencies was accurately perceived within milliseconds by the IEA-VI system. D Current time history in the stiffness regulator of the IEA-VI system. Similar to the simulation results (see Fig. 4C), the IEA-VI system works in HSLDS mode (1.2 A current) when the perceived frequency is higher than the threshold frequency fQ (7.1 Hz); otherwise, it switches to work in HDS mode (−1.2 A current). E Measured displacement time histories at the payload when the system, respectively worked in the three modes. F Enlarged views of the steady-state displacements of the system, respectively, in HDS, HSLDS, and IEA modes.
Discussion
State-of-the-art vibration isolators are increasingly introduced with advanced mechanisms to enhance their adaptability to various excitations, making them suitable for protecting complex and high-precision devices. However, the incumbent VI systems often struggle to accommodate unpredictable external excitations due to their fixed working bandwidth, ultimately failing outside the working frequency range. In contrast, the human body demonstrates remarkable adaptability to diverse environments. This is achieved through the coordination of its perceptual units, peripheral nervous system, brain, and musculoskeletal actuators, which effectively maintain stability and protect against environmental disturbances. This intelligent mechanism of environmental adaptation provides valuable insights for advancing artificial VI technology.
Inspired by the adaption process of biological systems, we propose an IEA architecture for full-spectrum vibration control. Our design philosophy integrates autonomous stiffness-switching with a high-precision, real-time frequency perception strategy across the entire frequency spectrum. Via our pioneering design philosophy of the IEA-VI system, capable of operating in either HDS or HSLDS mode and switching between them as needed, we comprehensively characterize and demonstrate the performance of the proposed IE-VI. This system features non-resonance across the entire frequency range, along with the broad working bandwidth of HSLDS vibration isolators. To achieve real-time frequency perception of excitation, we introduce a knowledge-based approach that relies solely on displacement responses. This approach effectively addresses the time-consuming challenge of traditional techniques for perceiving low frequencies, reducing the time consumption by up to 90% (from 500 to 50 ms) compared to traditional FFT-based methods. The reduction enhances the real-time mode switching of the system, ensuring timely optimal isolation performance across the full frequency band.
The current frequency perception approach assumes single harmonic inputs. Future work will focus on developing a more general frequency perception approach capable of operating reliably across diverse excitation profiles. Additionally, future efforts will optimize the IEA-VI system for effective operations under a broader range of excitation conditions, including multi-frequency and random excitations. Another future direction involves designing multi-mode switching IEA-VI structures to enhance adaptability in environments with substantial and complex vibrations. These findings and future topics not only showcase the promising potential of the IEA-VI system but also lay a solid foundation for developing inerter-based and damper-based mode-switching IEA-VI methods.
Methods
Simulation setups for studying the IEA-VI system
In the simulations of this study, the parameter values were fixed unless otherwise stated, as listed in Supplementary Table S1. The used excitations were harmonic with a displacement amplitude of 0.5 mm. In this case, the corresponding frequency (fQ) at point Q, where the transmissibility curves of the system in HDS mode and HSLDS mode intersect, is 2.7 Hz. In the simulation for verifying the performance of the IEA-VI system under a more variable excitation, the excitation frequency was randomly selected within the range from 1.6 to 18 Hz (see Fig. 4A). At each frequency, the excitation lasted for 2 s. Additionally, fQ was used as the threshold for determining whether to switch between HDS mode and HSLDS mode. When the perceived frequency of the external excitation was lower than fQ, the current was set to −2 A (HDS mode); otherwise, it was tuned to 2 A (HSLDS mode).
Fabrication of the vibration isolator prototype
The electromagnetic vibration isolator is the core component of the IEA-VI system. Its prototype was fabricated by assembling a nesting-type electromagnetic apparatus and a linear helical spring concentric to a rigid shaft that was mounted on a rigid frame at one end and supported a payload at the other end (see Fig. 5B and Supplementary Fig. S11). The electromagnetic apparatus consisted of six identical ring PMs and six identical CWs (see Fig. 2A). All PMs were magnetized along the positive axial direction, and the magnetization direction of the adjacent PMs aligned with that of the current in the adjacent CWs. The PMs were fixed to a base through a support, and the CWs were fastened to a rigid shaft through an aluminum thin-walled cylindrical sleeve concentric to the shaft. A tiny clearance was configured between the PMs and the sleeve to prevent interference between the PMs and CWs. Linear bearings were installed to ensure the axial movement of the shafts while simultaneously reducing friction on their contact surfaces. All parts of the vibration isolator prototype, along with their geometric parameters and physical properties, are detailed in Supplementary Table S1 and Fig. S11.
Experimental setups for the dynamical characterization of the IEA-VI system
The experimental platform in Fig. 5A mainly included (i) a shaker for generating external excitations and (ii) a shaking platform supported by linear springs at its four corners. The electromagnetic vibration isolator was installed on the shaking platform. The external excitations were scheduled using a signal generator (SIGLENT, SDG 5112) and generated by a shaker (TIRA, S52120), with the signal amplified by a power amplifier (TIRA, BAA 500). Its accuracy was ensured by feedback signals from an accelerometer sensor fixed onto the shaker. In tests, two laser displacement sensors (Panasonic Industry, HG-C1100) were used to measure the motions of the shaker and the payload, respectively, and their information was recorded by a data acquisition and signal conditioning device (National Instruments, PXIe-4497) and sent to a processor (National Instruments, PXIe-8880) for frequency perception and current control through a deployed program (see Supplementary Fig. S12). Based on the developed algorithms, the processor instructed an analog output module (National Instruments, PXIe-4322) with the other power amplifier (Sinocera, YE5873A) to automatically apply on-demand DC currents to drive the electromagnetic device of the IEA-VI system for intelligently adapting to the excitation.
Data availability
All data needed to evaluate the conclusions in this paper are present in the paper and/or the Supplementary Information. Additional data and raw data are available upon request from the authors.
References
Baines, R. et al. Multi-environment robotic transitions through adaptive morphogenesis. Nature 610, 283–289 (2022).
Rus, D. & Tolley, M. T. Design, fabrication and control of soft robots. Nature 521, 467–475 (2015).
Gong, S. et al. An intelligent spinal soft robot with self-sensing adaptability. Innovation 5, 100640 (2024).
Gu, G. et al. A soft neuroprosthetic hand providing simultaneous myoelectric control and tactile feedback. Nat. Biomed. Eng. 7, 589–598 (2023).
Peng, X. et al. A breathable, biodegradable, antibacterial, and self-powered electronic skin based on all-nanofiber triboelectric nanogenerators. Sci. Adv. 6, eaba9624 (2020).
Kim, Y. et al. A bioinspired flexible organic artificial afferent nerve. Science 360, 998–1003 (2018).
Sundaram, S. et al. Learning the signatures of the human grasp using a scalable tactile glove. Nature 569, 698–702 (2019).
Lagemann, E., Brunton, S. L., Schröder, W. & Lagemann, C. Towards extending the aircraft flight envelope by mitigating transonic airfoil buffet. Nat. Commun. 15, 5020 (2024).
Jiao, X. et al. Advances in spacecraft micro-vibration suppression methods. Prog. Aerosp. Sci. 138, 100898 (2023).
Ding, J. et al. Dynamic modeling of ultra-precision fly cutting machine tool and the effect of ambient vibration on its tool tip response. Int. J. Extreme Manuf. 2, 025301 (2020).
Maiuri, M. Vibration isolation could boost performance of near-infrared organic LEDs. Nature 629, 289–290 (2024).
Liu, C., Jing, X., Daley, S. & Li, F. Recent advances in micro-vibration isolation. Mech. Syst. Signal Process 56, 55–80 (2015).
Zhu, W., Zong, Q., Tian, B. & Liu, W. Disturbance observer-based active vibration suppression and attitude control for flexible spacecraft. IEEE Trans. Syst. Man Cybern. 52, 893–901 (2022).
Ozsoy, M., Sims, N. D. & Ozturk, E. Robotically assisted active vibration control in milling: a feasibility study. Mech. Syst. Signal. Process 177, 109152 (2022).
Ma, H., Guo, J., Wu, J., Xiong, Z. & Lee, K.-M. An active control method for chatter suppression in thin plate turning. IEEE Trans. Ind. Inform. 16, 1742–1753 (2019).
Zhang, P. & Zhu, C. Vibration control of base-excited rotors supported by active magnetic bearing using a model-based compensation method. IEEE Trans. Ind. Electron. 71, 261–270 (2024).
Airimitoaie, T.-B. & Landau, I. D. Robust and adaptive active vibration control using an inertial actuator. IEEE Trans. Ind. Electron. 63, 6482–6489 (2016).
Soni, T., Dutt, J. K. & Das, A. S. Parametric stability analysis of active magnetic bearing supported rotor system with a novel control law subject to periodic base motion. IEEE Trans. Ind. Electron. 67, 1160–1170 (2020).
Sun, X.-M., Wang, X.-F. & Mazenc, F. Delay-hybrid-dependent stability for systems with large delays. IEEE Trans. Syst. Man Cybern. 50, 2752–2759 (2018).
Chen, Z., Yao, B. & Wang, Q. μ-synthesis-based adaptive robust control of linear motor driven stages with high-frequency dynamics: a case study. IEEE/ASME Trans. Mechatron. 20, 1482–1490 (2014).
Ibrahim, R. Recent advances in nonlinear passive vibration isolators. J. Sound Vib. 314, 371–452 (2008).
Huang, X., Wang, B., Huang, Z., Hua, X. & Chen, Z. A theoretical model for a low-frequency two-stage hybrid vibration isolator with a nonlinear energy sink and a negative stiffness spring. Appl. Math. Model. 142, 115948 (2025).
Yuan, S. et al. An electromagnetic negative stiffness spring with high response speed and its semiactive vibration control. IEEE Trans. Ind. Electron. 71, 14503–14512 (2024).
Yang, J., Rajasekar, S. & Sanjuán, M. A. Vibrational resonance: a review. Phys. Rep. 1067, 1–62 (2024).
Carrella, A., Brennan, M. & Waters, T. Static analysis of a passive vibration isolator with quasi-zero-stiffness characteristic. J. Sound Vib. 301, 678–689 (2007).
Le, T. D. & Ahn, K. K. A vibration isolation system in low frequency excitation region using negative stiffness structure for vehicle seat. J. Sound Vib. 330, 6311–6335 (2011).
Liu, J. et al. Theoretical and experimental analysis of symmetric and asymmetric magnet-based bistable vibration isolators. Mech. Syst. Signal. Process 224, 111956 (2025).
Yan, B. et al. Seahorse-exoskeleton-inspired structure with linear-to-torsion transition property for low-frequency vibration isolation. Fundam. Res. 5, 1505–1523 (2025).
Symans, M. D. & Constantinou, M. C. Semi-active control systems for seismic protection of structures: a state-of-the-art review. Eng. Struct. 21, 469–487 (1999).
Zeng, Z., Zhang, L., Yan, M. & Zhang, C. Recent advances and future research directions in semiactive control isolator. Sci. Sin. Phys. Mech. Astron. 51, 124603 (2021).
Hu, G., Ying, S., Qi, H., Yu, L. & Li, G. Design, analysis and optimization of a hybrid fluid flow magnetorheological damper based on multiphysics coupling model. Mech. Syst. Signal. Process 205, 110877 (2023).
Zhang, G., Furusho, J. & Sakaguchi, M. Vibration suppression control of robot arms using a homogeneous-type electrorheological fluid. IEEE/ASME Trans. Mechatron. 5, 302–309 (2000).
Nie, S., Zhuang, Y., Wang, Y. & Guo, K. Velocity & displacement-dependent damper: a novel passive shock absorber inspired by the semi-active control. Mech. Syst. Signal. Process 99, 730–746 (2018).
Kela, L. & Vähäoja, P. Recent studies of adaptive tuned vibration absorbers/neutralizers. Appl. Mech. Rev. 62, 060801 (2009).
Zhai, Z., Wang, Y., Lin, K., Wu, L. & Jiang, H. In situ stiffness manipulation using elegant curved origami. Sci. Adv. 6, eabe2000 (2020).
Chen, T., Pauly, M. & Reis, P. M. A reprogrammable mechanical metamaterial with stable memory. Nature 589, 386–390 (2021).
Churchill, C. B., Shahan, D. W., Smith, S. P., Keefe, A. C. & McKnight, G. P. Dynamically variable negative stiffness structures. Sci. Adv. 2, e1500778 (2016).
Zhao, Y. & Meng, G. A bio-inspired semi-active vibration isolator with variable-stiffness dielectric elastomer: design and modeling. J. Sound Vib. 485, 115592 (2020).
Yang, L., Wang, H., Zhang, D., Yang, Y. & Leng, D. Large deformation, high energy density dielectric elastomer actuators: principles, factors, optimization, applications, and prospects. Chem. Eng. J. 489, 151402 (2024).
Leng, D., Feng, W., Ning, D. & Liu, G. Analysis and design of a semi-active X-structured vibration isolator with magnetorheological elastomers. Mech. Syst. Signal. Process 181, 109492 (2022).
Yan, G. et al. Bio-inspired vibration isolation: methodology and design. Appl. Mech. Rev. 73, 020801 (2021).
McGrath, B. P., Holmes, D. G. & Galloway, J. J. H. Power converter line synchronization using a discrete Fourier transform (DFT) based on a variable sample rate. IEEE Trans. Power Electron. 20, 877–884 (2005).
Bierhoff, M. H. A general PLL-Type algorithm for speed sensorless control of electrical drives. IEEE Trans. Ind. Electron. 64, 9253–9260 (2017).
Rodriguez, P. et al. Multiresonant frequency-locked loop for grid synchronization of power converters under distorted grid conditions. IEEE Trans. Ind. Electron. 58, 127–138 (2011).
Ahmed, H., Bierhoff, M. & Benbouzid, M. Multiple nonlinear harmonic oscillator-based frequency estimation for distorted grid voltage. IEEE Trans. Instrum. Meas. 69, 2817–2825 (2020).
Beltran-Carbajal, F. et al. Closed-loop online harmonic vibration estimation in DC electric motor systems. Appl. Math. Model. 94, 460–481 (2021).
Rivin, E. Passive vibration isolation. Appl. Mech. Rev. 57, B31–B32 (2005).
Zhang, L., Zhang, R., Xie, L. & Xue, S. Dynamics and isolation performance of a vibration isolator with a yoke-type nonlinear inerter. Int. J. Mech. Sci. 254, 108447 (2023).
Carrella, A., Brennan, M., Waters, T. & Lopes, V. Jr Force and displacement transmissibility of a nonlinear isolator with high-static-low-dynamic-stiffness. Int. J. Mech. Sci. 55, 22–29 (2012).
Sun, X., Xu, J., Jing, X. & Cheng, L. Beneficial performance of a quasi-zero-stiffness vibration isolator with time-delayed active control. Int. J. Mech. Sci. 82, 32–40 (2014).
Zhang, Z., Zhang, Y.-W. & Ding, H. Vibration control combining nonlinear isolation and nonlinear absorption. Nonlinear Dyn. 100, 2121–2139 (2020).
Yang, J., Jiang, J. Z. & Neild, S. A. Dynamic analysis and performance evaluation of nonlinear inerter-based vibration isolators. Nonlinear Dyn. 99, 1823–1839 (2020).
Sun, Y. et al. High-static–low-dynamic stiffness isolator with tunable electromagnetic mechanism. IEEE/ASME Trans. Mechatron. 25, 316–326 (2019).
Lenk, C. et al. Neuromorphic acoustic sensing using an adaptive microelectromechanical cochlea with integrated feedback. Nat. Electron. 6, 370–380 (2023).
Khalighinejad, B., Herrero, J. L., Mehta, A. D. & Mesgarani, N. Adaptation of the human auditory cortex to changing background noise. Nat. Commun. 10, 2509 (2019).
Fagiani, R., Massi, F., Chatelet, E., Berthier, Y. & Akay, A. Tactile perception by friction induced vibrations. Tribol. Int. 44, 1100–1110 (2011).
Scheibert, J., Leurent, S., Prevost, A. & Debrégeas, G. The role of fingerprints in the coding of tactile information probed with a biomimetic sensor. Science 323, 1503–1506 (2009).
Dahiya, R. S., Metta, G., Valle, M. & Sandini, G. Tactile sensing—from humans to humanoids. IEEE Trans. Rob. 26, 1–20 (2010).
Bai, N. et al. A robotic sensory system with high spatiotemporal resolution for texture recognition. Nat. Commun. 14, 7121 (2023).
Huang, Y., Shao, C., Wu, B., Beck, J. L. & Li, H. State-of-the-art review on Bayesian inference in structural system identification and damage assessment. Adv. Struct. Eng. 22, 1329–1351 (2019).
Chen, C. et al. Low-dimensional dynamical models of structures with uncertain boundaries via a hybrid knowledge-and data-driven approach. Mech. Syst. Signal. Process 223, 111876 (2025).
Pu, H. et al. Bio-inspired quasi-zero stiffness vibration isolator with quasilinear negative stiffness in full stroke. J. Sound Vib. 574, 118240 (2024).
Acknowledgements
We acknowledge the support from the National Natural Science Foundation of China (No. 12202116), the Natural Science Foundation of Heilongjiang Province of China (No. LH2023A003), the General Projects of Natural Science Foundation of Shanghai (No. 24ZR1423200), and the Fundamental Research Funds for the Central Universities of China (No. HSF20230049).
Author information
Authors and Affiliations
Contributions
S.C. and Y.W. conceived the research. S.C. developed the experimental platform and performed the experiments. S.C. and Q.W. performed the simulations. Y.W., S.C., Q.W., D.C., and B.W. analyzed the data. Y.W., S.C., H.H., and B.W. wrote the manuscript. Y.W. and B.W. supervised the research and provided the funding.
Corresponding authors
Ethics declarations
Competing interests
The authors declare no competing interests.
Peer review
Peer review information
Communications Engineering thanks Serife Tol and the other anonymous reviewer(s) for their contribution to the peer review of this work. Primary handling editors: Maria Sakovsky and Rosamund Daw. A peer review file is available.
Additional information
Publisher’s note Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution-NonCommercial-NoDerivatives 4.0 International License, which permits any non-commercial use, sharing, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if you modified the licensed material. You do not have permission under this licence to share adapted material derived from this article or parts of it. The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by-nc-nd/4.0/.
About this article

Cite this article
Chen, S., Wang, Y., Wu, Q. et al. Intelligent excitation adaptability for full-spectrum real-time vibration isolation. Commun Eng 4, 147 (2025). https://doi.org/10.1038/s44172-025-00486-3
Received:
Accepted:
Published:
Version of record:
DOI: https://doi.org/10.1038/s44172-025-00486-3
