
Abstract
The rise of the Internet of Things (IoT) is creating new communication needs that require us to completely rethink how we design wireless interaction between potentially diverse devices, which must be increasingly environmentally friendly and agile. This article introduces a wireless communication method elegantly grounded in the principle of the RF feedback loop. Unlike traditional communication methods, this approach does not require the reader to emit any waves in the absence of a transponder. Instead, communication occurs when a self-sustaining wave spontaneously emerges as the transponder enters the reader’s reading zone, forming an active feedback loop between the two devices. This novel method of transmitting RF signals creates a new paradigm in the communications field that will significantly influence modes of interaction, especially in the IoT. This method significantly decreases the emission of unnecessary RF waves and ensures complete discretion for the reader when no transponder is within range. The principle of Wireless Active Feedback Loop Communication (WAFLC) has been validated through both simulations and practical tests, showing a strong correlation between the two.
Similar content being viewed by others

Introduction
The Internet of Things (IoT) is experiencing significant growth, driven by interactions between powered transceivers and several simpler transponders. These transponders often function as passive systems, without a battery, and are utilized for sensing or identification purposes1. A common example is RFID, where the reader is powered and transponders (also known as tags)2,3 are usually passive and are remotely powered by the reader to operate4. In these applications, to detect the presence of a tag in the vicinity and therefore to start the communication, the reader must constantly emit an EM wave (a periodic transmission of frames). This continuous mode of interrogation, which is therefore very energy-intensive, is also inerrant in the absence of a power source on the tag side. These emissions cause environmental concerns (due to the wasted power emitted) and EM pollution, which disrupts and degrades other nearby communications systems.
In IoT, the problem also arises for systems where the transponder is battery-powered (active systems), usually compact and mobile, and its lifetime is linked to its battery capacity. Significant work has led to the introduction of alternatives for reducing energy consumption on the transponder side, such as Wake-Up Radio approaches5, where in the absence of communication, the tag is in standby mode with very low power consumption. Passive Wake-Up Radios are also possible, where the transponder powers its own wake-up circuit by recovering the energy emitted by the reader. However, whether for totally passive systems (e.g., UHF RFID) or systems based on the Wake-Up Radio principle, the reader must constantly emit a signal to establish communication as soon as the tag arrives in the reading zone, to limit any latency in establishing communication.
To address these issues, the principle introduced in the article is to dimension the reader/transponder system as a wireless active feedback loop. In this case, a spontaneous RF oscillation is produced by the feedback induced by the transponder located near the reader that makes up the loop. This oscillation is at the origin of the RF wave that propagates and is the communication vector. So, when the loop is not formed (absence of a transponder in the reading zone), no RF wave is emitted, guaranteeing the absence of any nuisance. Conversely, when the transponder is in proximity to the reader, the feedback loop is formed and an RF oscillation is instantly generated, enabling communication between the two elements. More precise information is described in detail in the “Methods” section regarding the potential reduction in consumption depending on the intended application, as well as a comparison between traditional “Reader-initiated” and “Event-triggered” communication modes and the new mode introduced by the communication mechanism presented here, which can be called “Reader & tag Co-triggered.”
The use of feedback is the basis of many systems, particularly in electronics and RF. A periodic signal can be generated when the various elements of the loop meet conditions such as the Barkhausen or Nyquist stability criteria6, or conditions on the electrical components of the circuit7. For example, Barkhausen’s stability criterion sets a necessary condition for a circuit consisting of an amplifier and a feedback loop to start oscillating spontaneously. In this simple case, it’s sufficient to meet a condition on the amplitude of the system (the loop gain is equal to unity in absolute magnitude) and on the phase (the phase shift around the loop is zero or an integer multiple of 2π).
For RF communication systems, works can be cited on the realization of an oscillating transmitter system by integrating the antenna in the feedback loop. In this case, an integrated antenna oscillator is created by directly combining an active solid-state device with an antenna8. Other examples involve the use of its continuous oscillations, based on the Active Resonator concept9 to enhance the sensitivity of sensors10,11,12. Another example is ref. 9, which introduces a method for measuring the permittivity of a dielectric material using a system comprising a resonator and an active feedback loop electromagnetically coupled to the resonator to form an oscillator generating signals at the oscillation frequency of the oscillator. The system comprises two antennas used to send and receive the oscillating signals, as well as a vector network analyzer used to generate and measure the oscillation frequency of the signals. What all these works have in common is that the feedback loop is created by physically linking the various elements together (using transmission lines, wires, etc.). The concept introduced in this paper is fundamentally different in that the feedback loop, dimensioned to oscillate at RF frequencies, is realized using elements that are not physically connected to each other, but interact through the propagation of waves between them. This concept opens the door to a wide range of applications based on this new type of communication. Indeed, this active loop principle, which enables a sustained oscillation that can be modulated (e.g., in amplitude) to send a message, is different from current communication techniques. We’re not talking about the classic send-receive principle of a signal between a sender and a receiver, where once the receiver has processed the information received, it re-transmits a new signal in response. This is also different from the principle of backscattering (used, for example, in RFID), which consists of retro-modulating a signal emitted by the reader without being at the origin of the emission of the signal power itself1.
Here, an oscillation is created between the reader and the transponder, which themselves form the feedback loop. The simplest case of such a system is a reader consisting of an amplifier connected at each port to an antenna and a transponder like a resonant scatterer, with no electronic components (such as a chipless tag3,10). As oscillation can only be triggered when these two elements are present at a distance (to form the loop), no RF waves are emitted when the transponder is not in the reading zone. This can lead to significant savings in terms of energy consumption, as well as significantly reducing RF pollution in the environment, and thus considerably limiting interference with other RF systems in the vicinity. This concept also opens the way to new sensor applications where the transponder, like an RFID tag, can be positioned in contact with a material to be characterized, and where the frequency of the oscillation thus obtained will be a function of the permittivity of the material9,11,12.
The WAFLC operating principle is different from conventional communication methods. The most widespread systems are based on successive, bidirectional EM transmissions between a transmitter (which later becomes the receiver) and reception of the signal by a receiver (which becomes the transmitter). This is also different from the backscattering principle used in UHF RFID2. In this letter case, to communicate, the reader continuously emits a carrier and the transponder transmits its return signal, modulating the emitted signal by backscattering. There are also communications based on the radar principle, as in Chipless RFID, where the transponder is purely passive and linear3,13,14.
The communication principle introduced is based on creating a wireless loop between the devices to be communicated with. Feedback is a dynamic process in which an effect actively influences its own cause, establishing a continuous loop of cause and effect. We thus have an iterative, looped process that establishes an RF oscillation, which in turn establishes a periodic RF signal that serves as a carrier for the information transfer. In this way, traditional emitter/receiver concepts are lost, in the sense that the signal is not emitted (or received) by one of the devices, but generated by the proximity of the various elements that make up the closed loop. However, we’ll keep the notion of reader and transponder to facilitate comparison with IoT devices and to maintain the presence of an active and more complex device (the reader) and transponders that can be semi-active (power supply only allowing modulation of the signal) or totally passive and may even comprise no electronic components at all (similar in this case to a chipless tag).
As seen in Fig. 1a, the closed loop that enables the spontaneous creation of the carrier (and therefore the exchange of information at a distance) is linked to the proximity of the reader and transponder. In this configuration, the noise generated by the reader’s amplifier will be reflected by the transponder, recovered by the reader, and amplified iteratively until an RF wave is established and propagated between the two elements. The reader and the transponder can be designed in such a way as to enable the establishment of an oscillation at a predetermined frequency. In this case, the sinusoidal RF wave can play the same role as the carrier emitted by the transmitter in conventional communication. To understand the conceptual difference with conventional communication techniques, it is interesting to simplify the reader and transponder as much as possible, as shown in Fig. 1b. In this case, the reader is reduced to an amplifier connected to two antennas, assumed to be decoupled from each other. The transponder is a chipless tag with its own resonant frequency. The radar cross section (RCS) of this tag will therefore include a peak at the resonance frequency \({f}_{r}\) of the pattern. As with a filter (like the one shown in Fig. 1a on the transponder side), this will cause the majority of the signal at frequency \({f}_{r}\) to be reflected. As explained, the system will become looped when the transponder is positioned close to the reader, at distances where the interaction between the two elements will create an oscillation, in this case at frequency \({f}_{r}\). Part of the noise generated by the reader’s amplifier will reflect off the transponder and be picked up by the reader’s receiving antenna to be amplified, and this is done iteratively. For a real amplifier, this iterative phoneme will stabilize in amplitude to form a sinusoidal RF wave propagating between the two elements at frequency \({f}_{r}\). In terms of information exchange, in this simple case, the resonant frequency is the transponder identifier (ID) linked to its geometry (length L Fig. 1b). If the reader contains an electronic device capable of picking up part of the signal present in the loop (e.g., using a coupler), it will be able to recover this frequency \({f}_{r}\) and thus identify the transponder ID. More precise information on the principle used to communicate the information, on the frequency of the oscillation, and on the conditions for establishing spontaneous oscillation is described in detail in the “Methods.”

a Overview of reader and transponder. b Simplified system where the transponder is totally passive and has no components. c Reading distance as a function of loop gain (at 4 GHz) to satisfy the condition of spontaneous oscillation on amplitude (σ = −19 dBsm).
Using standard analytical expressions, it is useful to estimate orders of magnitude, such as determining the achievable reading distances based on amplifier gain. To do that, we will focus on the configuration where the transponder is a chipless tag consisting of a resonant scatterer (Fig. 1b). In a mono-static configuration, where the antennas are aligned and directed for optimum directional reception, the radar range equation is written as:
This equation relates the power \({P}_{r}\) delivered to the receiver load to the input power \({P}_{t}\) transmitted by the reader’s transmit antenna, after being backscattered by a target with an RCS σ. If at the resonant frequency of the transponder, the phase shifter is lossless, for the looped system, the ratio\(\,{P}_{r}/{P}_{t}\) is the transfer function of the feedback loop. If we note A the gain of the amplifier located on the reader side, the relationship \(A\cdot {P}_{r}/{P}_{t}\) is the loop gain around the feedback loop of the system. The amplitude condition for the system to sustain steady-state oscillations is:
It is possible to use (1) and (2) to estimate the read distance d as a function of the amplifier gain A, and the antennas gains \({G}_{t}{,\,G}_{r}\):
As explained in the section “Conditions for establishing spontaneous oscillation,” this distance represents the maximum range at which oscillation can occur (although the phase condition must also be satisfied to achieve oscillation at this range). For distances greater than \({d}_{\max }\), no oscillation is possible since the amplification can no longer offset the losses in the loop, which are due to the distance between the two devices. From (3), the relationship between amplifier gain A and the distance index has been plotted. A tag with an RCS σ of −19 dBsm was considered in the results shown in Fig. 1c. This value corresponds to a dipole-shaped patch interrogated in cross-polarization as shown in Fig. 2a (L = 33 mm). Without loss of generality, two identical antennas were considered (\({G}_{t}{=G}_{r}=G\)). Of all the \(G\) gains simulated, those corresponding to the Satimo QH2000 and QH800 antennas15 are shown on the graph, as is the case with the half-wave dipole. It can be seen from Fig. 1c that at 4 GHz, a distance d of one meter with these antennas (\(G\) = 10.8 dBi and \(G\) = 5.8 dBi for the QH800 and QH2000 antennas and \({G}\) = 2.15 dBi for the dipole) requires an amplifier with a gain of 52 dB, 63 dB, and 70 dB, respectively. With a gain of 40 dB (achievable in practice with a commercial amplifier), distances of 45 cm, 25 cm, and 17 cm, respectively, are obtained. This shows that this type of communication is best suited to short-range applications. These reading distances are similar to those achievable with chipless RFID3. However, if the transponder also has an amplifier, with 80 dB of gain in the loop, this system could oscillate up to several meters away: 1.8 m for the dipole and 4.75 m for the QH800 antenna.

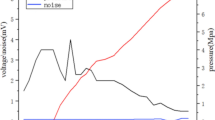
a Radiative part of the loop. b Circuit part with an amplifier gain A = 50 dB. c Evolution over time of the voltage generated at the looped system (probe P1) for two characteristic distances d. d Zoom of signals between 80 and 85 ns. e Evolution of the time \({\tau }_{d}^{0.1{\rm{V}}}\) as a function of distance d.
Simulations were conducted to demonstrate the operating principle of the proposed solution. They are described in detail in the “Methods.” Figure 2a shows the reader’s antenna section and the simulated transponder. This passive block is connected to the amplifier in Fig. 2b. Figure 2c shows the establishment of oscillation for two characteristic d values. An oscillation at the frequency of 4.19 GHz (see Fig. 2c insert) is observable for d = 13.8 cm (see Fig. 2d), whereas it disappears for d = 15.8 cm. The frequency of 4.19 GHz corresponds to the frequency \({f}_{r}\) of the resonant scatterer also obtained in simulation with a plane-wave excitation (without feedback loop). We also note that, while the amplifier is ideal (no saturation), the signal amplitude does not stabilize and diverges as a function of time. This behavior differs from what is observed in practice, but this simplified model demonstrates the emergence of oscillation at a frequency set by the transponder.
The evolution of oscillations as a function of distance d is shown in Fig. 2e. The time \({{\rm{\tau }}}_{d}^{0.1V}\) for which the loop voltage (probe P1 in Fig. 2b) is equal to 0.1 V is plotted as a function of the distance d. Oscillations are observed at intervals of \(\lambda /2\) (3 such intervals are visible in Fig. 2e). This observation corresponds to the phase condition imposed by Barkhausen’s criterion. It is also clear from Fig. 2e that from one oscillation interval to the next, the time \({{\rm{\tau }}}_{d}^{0.1V}\) increases. As the distance increases, it takes longer to reach a given voltage (in this case, 0.1 V) at the loop: the signal needs to make more round trips (each time amplified) between the reader and the transponder, which takes longer as the distance d increases.
Results
The measurement bench and transponders used are shown in Fig. 3 and are described in detail in the “Methods.”

a Configuration with RF filter, b zoom on tag positioning and various foam wedges to control antenna spacing d. c Configuration without RF filter, d zoom on the tag under which a plastic film has been inserted to modify its resonant frequency \({f}_{r}\). e Metal plate used as a radar target, f dipole-shaped resonant patch, g rectangular resonant loop.
The configuration shown in Fig. 3a includes an amplifier, a 4 GHz filter, and a QH800 antenna. The loop is closed by the presence of a scatterer. Two configurations are studied: the presence of a metal plate (20 µm-thick aluminum foil) with dimensions of 3 × 5 cm2, and resonant scatterers with a frequency \({f}_{r}\) exactly matching that of the filter (see Fig. 3f, g). The resonators are shown in Fig. 3f for the dipole patch and in Fig. 3g for the rectangular loop. The RCSs obtained in simulation (cross-polarization configuration) at resonant frequency (4 GHz) for the rectangular loop and the patch are −24.7 dBsm and −18.9 dBsm, respectively. The RCS of the metal plate is −27.3 dBsm at 4 GHz.
Scatterers used as transponders are precisely positioned at different distances from the antenna using foam wedges, as shown in Fig. 3b. The distances d mentioned are referenced to the table on which the antenna is placed (the QH800 antenna is 24.5 cm high15). Once the object has been placed on the foam supports, the oscilloscope (connected directly to the QH2000 antenna) is used to observe a portion of the signal propagating in the closed loop. Figure 4a, b shows the two observable states: the presence of an oscillation (characterized by its amplitude and frequency, Fig. 4a) and the absence of oscillation (Fig. 4b). It is possible to plot the relationship between distance d and oscillation amplitude. Zero amplitude indicates no oscillation. Compared with the simulation results shown in Fig. 2, the use of a real amplifier, characterized in particular by internal noise and limited output power (here 30 dBm output power), presents two notable differences: the oscillation is spontaneous, not requiring, as in simulation, the addition of an external source, and a sinusoidal wave of constant amplitude is obtained (Fig. 4a) rather than a sinusoidal signal whose amplitude diverges with time (Fig. 2c). For a given distance d, the amplitude of the wave is directly related to the output power of the amplifier.

a, b Visualization of the signal in the closed loop. Presence of oscillation (a). No oscillation (b). c–f. Characterization of read distance d as a function of signal amplitude for a closed loop (with 4 GHz RF filter and QH800 antenna for signal recovery) by a metal plate (c), by a rectangular resonant loop (d), by a dipole patch (e). f Same as (e) but using a −20 dB coupler to pick up the signal.
Figure 4c shows the results obtained with a metal plate. When oscillation occurs, the presence of the 4 GHz filter imposes a sinusoid at 4 GHz as seen in Fig. 4a. The vertical bars (Fig. 4c) are spaced 3.75 cm apart, i.e., half the wavelength at 4 GHz. Spontaneous oscillations appear every λ/2 up to d = 48 cm. The 0.5 cm resolution, coupled with the measurement resolution (uncertainty due to foam stacking), doesn’t always allow us to visualize the maxima of the different portions of the curves, so a study with a 0.9 mm step around the spike located at 37 cm has been carried out and is also shown in Fig. 4c.
The loop is then closed by a resonant scatterer. With cross-polarized excitation (Fig. 3a), the resonators are positioned at an angle of 45° to the antenna16, i.e., in the position that guarantees maximum RCS. Spontaneous oscillations were observed up to a distance of 45 cm for the rectangular loop (Fig. 4d, e) and 63 cm for the patch resonant scatterer (Fig. 4e). This difference is explained by the RCS value, which is more than 5 dB higher for the patch. This observation is also consistent when comparing these results with those of the metal plate (Fig. 4c)17.
To enable the reader to identify the transponder, the idea is to sample part of the closed-loop signal, allowing its amplitude and frequency to be detected and then processed in a microcontroller (Fig. 1a) for various applications. A coupler will be used, with the −20 dB port connected to the oscilloscope. At the loop level, the coupler is positioned just before the amplifier. The power displayed on the oscilloscope, therefore, indicates the received power \({P}_{r}\,\)[see (1)].
Compared with the previous use of an antenna, the coupler allows us to trace the amplitude of the oscillation more accurately, as there is no misorientation between the antenna and the transponder as d varies. The study was carried out on the dipole patch with displacements of 0.2 cm. The presence of spontaneous oscillations every λ/2 is clearly visible in Fig. 4f, up to 55 cm. Converted to power, the observed decay is in\(1/{d}^{4}\) which is consistent with the radar range Eq. (4) as discussed in the “Conditions for establishing spontaneous oscillation” part. It is interesting to compare this distance of 55 cm with that given by (3). Indeed, considering the physical parameters involved in this formula (A = 39 dB, \(\sigma \,=\) −18.9 dBsm, \({G}_{t}\,=\,{G}_{r}\,=\,10.8\,\mathrm{dBi}\), \(\lambda \,=\,7.5\,\mathrm{cm}\)), we obtained \({d}_{\max }\,=\,53\,\mathrm{cm}\), which is close to the 55 cm obtained in measurement. The final study involves removing the RF filter to observe the oscillation frequency set by the transponder. In this case, acquiring this frequency (via the coupler, for example) would enable the reader to identify the tag in the reading zone. The port-to-port isolation of the QH800 is −42 dB at 4 GHz15, which means that with the amplifier gain of 39 dB, condition (2) is very likely to be satisfied (for at least one frequency within the 4.2 GHz bandwidth of the amplifier) on a closed loop integrating only the amplifier and the QH800 antenna. To avoid this issue while using the same antenna and without any other filter, one solution is to lower the amplifier gain. With the built-in digital step attenuator of the amplifier, the gain has been reduced by 15 dB. Under these conditions, Fig. 1c shows that specification (2) can be met at a distance of a few centimeters above the top of the antenna. This has been tested in practice, as shown in Fig. 3c. Spontaneous oscillation was observed at a frequency of 3.998 GHz at distances between 1 and 2 cm above the tip of the antenna. To demonstrate that this frequency corresponds exactly to the resonant frequency \({f}_{r}\) of the tag, a 100 µm-thick PET film was positioned in contact with it, as shown in Fig. 3d. As expected, the frequency measured on the oscilloscope shifted to 3.937 GHz, with a decrease of 61 MHz. This study was repeated five times, and the same results were observed (variations of less than 1% on the measured frequencies). Regarding the measurement environment and its effect on system oscillation, characterizations using a filter and coupler were performed in an office-like setting (with objects, walls, ceilings, etc., more than one meter from the antenna). The results showed no significant difference from those obtained in an anechoic chamber. A dedicated study is currently in progress to evaluate the impact of adding objects near the tag and compare it with the limitations of chipless RFID systems in similar scenarios.
Conclusion
A method of communication based on the spontaneous closed-loop generation of oscillation has been introduced. In fact, a novel approach to emitting RF waves has been utilized here to enable short-distance communication between various RF devices. In this scenario, the reader interacts remotely and wirelessly with the transponder, creating the loop. A proof-of-concept was established in which a sinusoidal signal is obtained by placing a transponder and a reader in close proximity, comprising at least a transmit/receive antenna and an amplifier. Different configurations have made it possible to control this oscillation for identification applications, for example. Compared to conventional communication systems, particularly those used with batteryless transponders such as RFID, this approach does not require a continuous wave to be transmitted to initiate communication. Here, signal generation is spontaneous, i.e., the carrier is established in a few tens of nanoseconds. In the absence of a tag, no emissions (other than noise) are present. This is an important point, as it represents a complete break with current approaches, which permanently pollute the RF spectrum even in the absence of a transponder. The introduced method allows for more discreet readers that emit a signal only in the presence of a transponder, which is desirable for IoT communications. A reading distance of up to about 50 cm has been achieved. This distance can theoretically be extended to several meters by using an amplification system with higher gain and output power.
The demonstrated principle paves the way for a novel approach to interconnecting devices through RF and wireless links. It is fundamentally different from conventional approaches, and while it does not replace them, it can complement them by, for example, detecting a nearby transponder and triggering standard communication.
Methods
Conditions for establishing spontaneous oscillation
Looped systems are commonly used in practice; however, they differ from the system shown in Fig. 1a, b, as the elements forming the closed loop are not interconnected by a transmission line. Here, the link is wireless and based on RF wave propagation. Antennas are used to make the transition between a guided wave and a radiated wave. This difference has no direct impact on the conditions required to obtain oscillation. For example, Barkhausen’s stability criterion, which sets a necessary condition for a circuit consisting of an amplifier and a feedback loop to start oscillating spontaneously, can be used. The amplitude of the open loop must be unity. This means that the gain of the amplifier used in the configuration shown in Fig. 1a must compensate for the component losses in the loop and the attenuation due to the propagation of the wave in the air. The Friis equation thus links the value of the amplifier gain to the permissible distance between the reader and the transponder. If we consider the configuration in Fig. 1b, where the transmitter serves as a resonant scatterer, i.e., a radar target, the radar range equation can be used to estimate the distance d achievable relative to the gain value. The second condition concerns the phase of the open-loop transfer function: the phase shift around the loop must be zero or an integer multiple of 2π. This condition implies that spontaneous oscillation can only occur periodically, i.e., for variations in distance d in λ/2, where λ is the wavelength in free space. These two conditions on the amplitude and the phase must be met simultaneously for spontaneous oscillation to occur. One way of ensuring that communication is not lost in the reading zone where the amplitude condition is met is to provide phase shifters (see Fig. 1a) to compensate for the phase variation with distance to satisfy the phase condition.
Indeed, the principle of oscillation is based on two key points: (1) the oscillator must exactly compensate for losses with sufficient gain from the amplifier within the loop, and (2) feedback must be constructive, meaning in phase, so that the signal strengthens cycle after cycle. Let us consider the structures shown in Fig. 1a, b. We start by placing the tag very close to the reader, just a few centimeters away, to create a situation where the signal increases cycle after cycle. This indicates that the phase condition is satisfied, and given the amplitude, the short distance causes the loop gain to exceed 1 (\(\left|A\cdot {P}_{r}/{P}_{t}\right| > 1\)). As a result, the signal rapidly grows until it reaches a limit. In practice, the amplifier reaches its physical limits, leading to a saturated state with a constant output power \(\left(\right.{P}_{t}={P}_{{OP}}\) given for example at 1 dB compression point), which is the maximum output power. The radar range Eq. (1) can be rewritten as follows:
In this state, the received power \({P}_{r}\) (which can be measured using a coupler, for example), varies proportionally to \(1/{d}^{4}\).
If we then move the tag farther from the reader, similar observations will occur until reaching the maximum distance, denoted as \({d}_{\max }\) [see (3)], which corresponds to the amplitude condition to be respected in (1). At this point, the loop gain becomes unity, and beyond that, increasing the distance will lead to signal extinction \(\left(\right.\left|A\cdot {P}_{r}/{P}_{t}\right| < 1\)) without any chance of oscillation.
Oscillation frequency
The WAFLC communication principle is based on the spontaneous establishment of an oscillation. The frequency of this oscillation plays a fundamental role here. In the general case shown in Fig. 1a, this frequency can be set by using an RF filter on at least one of the network elements. This filter can be a narrow-bandpass filter, where the center frequency imposes the oscillation frequency. In the example shown in Fig. 1b, the filter function is directly integrated into the transponder geometry. Like a chipless tag18,19,20, the resonant scatterer primarily backscatters the wave at its resonant frequency. Thus, the spontaneous oscillation frequency of the loop will be determined by the geometry of the scatterer. If a rectangular loop is used as shown in Fig. 1b, it is the length L of the element that will determine the resonant frequency, as well as the nature of the dielectric used as support19. If different transponders have various geometries and unique IDs, the oscillation frequency will allow for their identification, similar to chipless RFID3. In this case, however, the radar signature is not used directly. Instead, the frequency of the spontaneous wave created in the loop can be retrieved by the reader. It is essential to note that the system illustrated in Fig. 1a, b is capable of simultaneously establishing multiple spontaneous oscillations at different frequencies. To ensure oscillation at various frequencies, the Barkhausen conditions must be met. This is associated with the amplifier’s bandwidth. Consequently, the system formed can potentially oscillate at any frequency within its operational range. The idea is the same for the antennas, which must also have an operating band that matches that of the rest of the system. In the case of a chipless tag (see Fig. 1b), two options exist: a tag with multiple resonators can be designed, which allows for a larger amount of information to be stored, or several tags can be identified using a single resonator as long as they are simultaneously positioned within the reading zone18. As each of these tags can satisfy the conditions for establishing an oscillation (with the rest of the loop, in this case, the reader), the phenomenon is perfectly compatible with the superposition of these different frequencies.
The method employed to communicate
In the absence of a component, as illustrated in Fig. 1b, the recovery of the oscillation frequency (or frequencies, in the case of a tag that contains multiple resonators) at the reader level allows for the identification of the tag. This principle can also be applied to implement a sensor function, where knowledge of the oscillation frequency provides information about the physical quantity being measured, similar to Chipless RFID9,21,22. For a transponder system that has its own power source, either self-powered or battery-powered, as shown in Fig. 1a, more advanced communication methods can be utilized. Indeed, the spontaneous oscillation induced by the feedback loop can serve as the carrier frequency for communication. Then, any communication protocol can be integrated into the system. The intelligent component, managed by the CPU, can control the hardware within the loop, which includes devices such as the amplifier, phase shifter, RF filter, and others. This enables the system to perform amplitude modulation, phase modulation, or a combination of both. This means that standard communication procedures can be applied, and it’s even possible to change the carrier frequency using the RF filter.
Simulations—WAFLC modeling
For the simulations, the CST Microwave Studio solvers were used to highlight the closed-loop oscillation and, in particular, the phase condition to be respected. To achieve this, the system considered in the simulations was simplified. Two identical dipole antennas (3 cm long, 4.27 GHz center frequency) were used. To minimize the risk of direct coupling between the antennas, which could create a feedback loop that excludes the transponder part, these low-gain antennas should be oriented perpendicularly to each other. Under these conditions, on the transponder side, we consider a patch-type elementary resonator (with a ground plane) designed to generate a single resonant frequency, where the pattern takes the form of a dipole-shaped rectangle (3.3 cm long and 4 mm wide, with a resonant frequency of 4.19 GHz and an RCS of −18.9 dBsm obtained on CST by a simulation where the scatterer resonant excitation is a plane wave) positioned at a 45° angle to the transmitting antenna. The distance d is variable to modify the space between the transponder and the dipole antennas. Figure 2a shows the reader’s antennas and the transponder. The amplifier on the reader side has been simulated on the “schematic” part of CST Microwave Studio as shown in Fig. 2b. This co-simulation, which includes a block describing the radiative part (antennas and transponder), is conducted in the time domain. Due to certain limitations of the solver, an ideal amplifier is implemented in which only the gain A is variable. Additionally, since this model does not generate any noise—which is the source of the spontaneous oscillation seeking—a Dirac-shaped source is considered on the “schematic” side to initiate the oscillation (it can be seen in Fig. 2c around 0 s). A simulation with a noise source would better model the initial signal of the oscillation, much like traditional electronic oscillators are simulated. Without such a source, we used an RF source to generate a short, low-amplitude pulse (approximately 120 mV peak) to trigger the oscillation. We note that choosing this pulse did not require optimization, indicating that its shape or amplitude is not crucial for the simulation.
Measurement setup
The measurement setup is shown in Fig. 3a. It has been positioned inside an anechoic chamber to isolate it from external EM disturbances. Several variants have been studied, but the basic elements are the TVA-11-422A+ wide frequency range from 10 to 4200 MHz amplifier, and the antennas (quad ridged open boundary antennas Satimo QH800 and QH2000 from MVG15). In addition to the devices introduced in Fig. 1a, an additional antenna present on the right of Fig. 3a is used and is connected to a 12 GHz oscilloscope (Agilent Infiniium DSO91204A) to remotely observe the signals generated by the looped system for results analysis. A second way to retrieve information on the presence or absence of spontaneous oscillations and their amplitudes is to add a coupler to the closed loop. In this configuration, the signal taken from the loop (−20 dB) is also visualized on the oscilloscope. Concerning the amplifier, it provides a 39 dB gain and a 30 dBm output power across a frequency range from 10 to 4200 MHz, with gain flatness of ±1.3 dB. A built-in digital step attenuator with push-button control allows to add an attenuation of up to 15 dB with a 1 dB step. As presented in Fig. 3a, cross-polarization measurements are done with a mono-static configuration, i.e., with Satimo (QH800) quad ridged open boundary antennas (0.8-12 GHz). Finally, as shown in Fig. 1a, a cavity filter from Mini-Circuits (ZVBP-4000-S+) will be used for some tests. It is a narrow bandwidth filter with a center frequency of 4 GHz, with high rejection and an insertion loss of 4.5 dB in the passband. As can be seen in Fig. 3b, various spacers (including a set of foam wedges of different thicknesses) are used to modify the distance d between the antenna and the transponder over a range of several tens of centimeters and a minimum spacing pitch of 0.9 mm.
Technical production
The transponders used are shown in Fig. 3e–g. They consist of a simple 10 µm-thick aluminum plate and two types of resonant scatterer. A patch with a dipole-shaped ground plane (see Fig. 3f) and a rectangular loop, as shown in Fig. 3g, was cut from a 50 µm-thick copper plate using a fiber laser. They were dimensioned on CST to have a resonant frequency corresponding to that of the RF filter. As a result, they resonate at a frequency close to 4 GHz when placed on the foam supports.
Energy efficiency and potential mode of use
The article discusses an innovative approach that helps reduce energy consumption in IoT communication systems, focusing on both the communication principle based on a feedback loop and its triggering mechanism. Traditionally, systems like battery-powered RFID readers cannot operate in continuous transmission mode because they would drain their power quickly. To address this, they can be equipped with external sensors, such as infrared or capacitive sensors, to detect the presence of a tag or a hand, for instance. These sensors “wake up” the reader only when an interaction is likely, thereby decreasing overall power consumption. However, this approach adds extra components, making the design more complex and costly.
The approach introduced in its core mode eliminates the need for external sensors by combining two key functions: detecting a tag’s presence and identifying it via RF communication. It operates in a hybrid mode, merging event-triggered operation with the “Reader-initiated” mode outlined by RFID standards for interrogating passive tags. Essentially, this means the system stays inactive and consumes minimal power when no tags are present, and automatically activates when a tag enters its reading zone, initiating communication. This allows electromagnetic waves to be emitted only when necessary, which is especially effective in applications with infrequent readings, such as wireless electronic locks used only a few times a day.
Energy savings in this setup are primarily estimated based on two factors: the difference in power consumption between active (\({P}_{{ON}}\)) and standby (\({P}_{{idle}}\)) modes, and the proportion of time the reader is actually used (\({T}_{{read}}\)) relative to total operational time (\({T}_{{Tot}}\)). The formula expresses the power-saving benefit over full activation:
This equation indicates that the longer the reader spends without detecting a tag, the greater the power savings.
Moreover, the system’s standby power usage mainly depends on the active component, particularly the amplifier. Class C, E, and F amplifiers are especially suitable because they are designed to consume very little power when no RF signal is present. For example, a Class C amplifier controlled by a microcontroller can use less than 1 mW in standby, compared to 0.5–2 W when active, resulting in a power ratio of about 1000 between the two states.
This new approach enables a seamless, automatic transition between standby and active states without requiring external signals, simplifying the hardware and potentially reducing device costs. Overall, in IoT communication systems, this approach offers two main benefits: significantly reducing energy use when readings are infrequent and simplifying reader design by removing the need for external sensors. Plus, it introduces a new interaction mode referred to as “Reader & tag Co-triggered,” which combines the benefits of “Reader-initiated” mode and “Event-triggered” mode. This new mode enables the reader to activate only when a tag is present, making it especially useful for applications where energy efficiency and passive tag compatibility are essential. It opens up new possibilities for creating more energy-efficient, intelligent RFID systems.
It should be noted that this proof of concept does not consider regulatory issues related to radio frequency emissions. When no tag is near the reader, the lack of RF emissions from the system necessarily indicates compliance with regulations. However, when the system is turned on (a tag is present in the reading zone), the emitted wave must comply with the RF emission masks required by the states.
Data availability
The data that support the plots within this paper and other findings of this study are available from the corresponding author upon reasonable request.
References
Kimionis, J., Georgiadis, A., Daskalakis, S. N. & Tentzeris, M. M. A printed millimetre-wave modulator and antenna array for backscatter communications at gigabit data rates. Nat. Electron. 4, 439–446 (2021).
Paret, D. RFID at Ultra and Super High FrEQUENcies: Theory and Application (John Wiley & Sons, 2009).
Perret, E. Radio Frequency Identification and Sensors: From RFID to Chipless RFID (Wiley-ISTE, 2014).
Song, M. et al. Wireless power transfer based on novel physical concepts. Nat. Electron. 4, 707–716 (2021).
Piyare, R., Murphy, A. L., Kiraly, C., Tosato, P. & Brunelli, D. Ultra low power wake-up radios: a hardware and networking survey. IEEE Commun. Surv. Tutor. 19, 2117–2157 (2017).
Shmaliy, Y. Continuous-Time Systems (Springer Science & Business Media, 2007).
Kurokawa, K. Some basic characteristics of broadband negative resistance oscillator circuits. Bell Syst. Tech. J. 48, 1937–1955 (1969).
Chang, K., York, R. A., Hall, P. S. & Itoh, T. Active integrated antennas. IEEE Trans. Microw. Theory Tech. 50, 937–944 (2002).
Abdolrazzaghi, M., Zarifi, M. H. & Daneshmand, M. Wireless communication in feedback-assisted active sensors. IEEE Sens. J. 16, 8151–8157 (2016).
Vena, A., Perret, E. & Tedjini, S. Chipless RFID Based on RF Encoding Particle—Realization, Coding and Reading System (ISTE - Elsevier, 2016).
Requena, F., Barbot, N., Kaddour, D. & Perret, E. Wireless complex permittivity measurement using resonant scatterers and a radar approach. IEEE Trans. Microw. Theory Tech. 71, 4427–4436 (2023).
Niu, S. et al. A wireless body area sensor network based on stretchable passive tags. Nat. Electron. 2, 361–368 (2019).
Azarfar, A., Barbot, N. & Perret, E. Motion-modulated chipless RFID. IEEE J. Microw. 3, 256–267 (2023).
Costa, F., Genovesi, S. & Monorchio, A. Chipless RFIDs for metallic objects by using cross polarization encoding. IEEE Trans. Antennas Propag. 62, 4402–4407 (2014).
Open Boundary Quad-Ridge Horns. Accessed 1 March 2025. Available: https://www.mvg-world.com/en/products/antennas/measurement-probes-and-feeds/open-boundary-quad-ridge-horns (2025).
Vena, A., Perret, E. & Tedjini, S. A depolarizing chipless RFID tag for robust detection and its FCC Compliant UWB Reading System. IEEE Trans. Microw. Theory Tech. 61, 2982–2994 (2013).
Azarfar, A., Barbot, N. & Perret, E. In Proc. 2022 IEEE/MTT-S International Microwave Symposium-IMS 129–132 (IEEE, 2022).
Vena, A., Perret, E. & Tedjini, S. Design of compact and auto compensated single layer chipless RFID tag. IEEE Trans. Microw. Theory Tech. 60, 2913–2924 (2012).
Rance, O., Siragusa, R., Lemaître-Auger, P. & Perret, E. Contactless characterization of coplanar stripline discontinuities by RCS measurement. IEEE Trans. Antennas Propag. 65, 251–257 (2017).
Polivka, M., Havlicek, J., Svanda, M. & Machac, J. Improvement in robustness and recognizability of RCS response of U-shaped strip-based chipless RFID tags. IEEE Antennas Wirel. Propag. Lett. 15, 2000–2003 (2016).
Costa, F. et al. A review of RFID sensors, the new frontier of Internet of Things. Sensors 21, 3138 (2021).
Requena, F., Barbot, N., Kaddour, D. & Perret, E. Combined temperature and humidity chipless RFID sensor. IEEE Sens. J. 22, 16098–16110 (2022).
Acknowledgements
This work was supported by the European Research Council (ERC) through the European Union’s Horizon 2020 Research and Innovation Program (ERC-2023-PoC - RFmatCarac) under Grant 101156045.
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Competing interests
The author declares no competing interests.
Peer review
Peer review information
Communications Engineering thanks Filippo Costa and the other, anonymous, reviewer for their contribution to the peer review of this work. Primary Handling Editors: [Ros Daw]. Peer review reports are available.
Additional information
Publisher’s note Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Supplementary information
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution-NonCommercial-NoDerivatives 4.0 International License, which permits any non-commercial use, sharing, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if you modified the licensed material. You do not have permission under this licence to share adapted material derived from this article or parts of it. The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by-nc-nd/4.0/.
About this article

Cite this article
Perret, E. Wireless active feedback loop for backscattering communication. Commun Eng 4, 192 (2025). https://doi.org/10.1038/s44172-025-00529-9
Received:
Accepted:
Published:
Version of record:
DOI: https://doi.org/10.1038/s44172-025-00529-9
