
Abstract
The Canadian Arctic Archipelago (CAA) lies within Inuit Nunangat, the homeland of the Inuit, and encompasses extensive coasts of Nunavut. These shorelines are continuously changing, shaped by sea ice, glaciers, icebergs, permafrost, and oceanographic dynamics during the open-water season. Inuit knowledge offers profound insights into coastal change; however, systematic measurements of ocean waves and water levels remain scarce, which limits our ability to model nearshore processes and anticipate shoreline responses, both critical for adaptation. We present a dataset of water levels and wave statistics collected between 2021 and 2023 in partnership with three communities: Ausuittuq (Jones Sound), Canada’s northernmost community; Ikaluktutiak and Kugluktuk (both in Coronation Gulf). The dataset includes 19 calibrated pressure sensors in the nearshore zone and 6 offshore wave buoys deployed with Inuit boat operators, capturing more than 427 days of hourly observations. Observed conditions include significant wave heights up to 1.7 m and peak wave periods up to 6.0 s. All files are published in open formats with structured documentation to ensure transparency, accessibility, and reuse.
Similar content being viewed by others


Background & Summary
Ocean waves in the Canadian Arctic Archipelago (CAA) are projected to increase by more than 0.4 –0.5%/y by 2081–2100 relative to the 1979–2005 period, largely due to sea ice reduction1. These projections align with Inuit knowledge, including observations by hunters and community members of changing wind patterns, sea ice stability2, and increased ocean wave activity3. Shifts in sea state impact Arctic marine ecosystems and traditional Inuit practices such as maintaining travel routes for hunting and fishing4. Intensified wave action also contributes to coastal erosion5 and flooding6, while global eustatic sea level rise and isostatic adjustment introduce complex spatial variability in relative sea levels across the Arctic7,8. Despite limited in situ coastal forcing observations in the CAA, community insights and leadership in land and sea ice travel provide critical context for understanding coastal ocean dynamics9,10. Connecting Inuit Qaujimajatuqangit (IQ), the Inuit Traditional Knowledge, and scientific research is central to better characterizing long-term changes in Arctic wave conditions11,12.
While numerical modelling is a powerful tool for simulating wave climates and forecasting coastal change, field-based observations remain essential for validating and calibrating such models for coastal planning and climate adaptation13. Hydrodynamic datasets in the Arctic are particularly scarce due to logistical and environmental challenges associated with fieldwork in remote, ice-affected locations14,15. In Inuit Nunangat, the Inuit homeland encompassing Nunatsiavut, Nunavik, the Inuvialuit Settlement Region, and Nunavut, scientific approaches that prioritize collaboration, cultural relevance, and community-driven data collection are critical16, and align with the National Inuit Strategy on Research17. In the Inuvialuit Region, for instance, in situ wave data have been collected to analyze the impact of storm waves on both whale hunting and shoreline erosion18,19. Among the benefits of such approaches, locally validated models support more effective climate adaptation strategies while building local capacity for community-led research20.
Despite Inuit Nunangat encompassing 72% of Canada’s coastline21, observational data on coastal waves and water levels are extremely limited. Across this vast region, only three tide gauges are located on Baffin and Ellesmere Islands in Nunavut: one in Frobisher Bay (Iqaluit), one in Baffin Bay (Qikiqtarjuaq) and another in the Lincoln Sea (Alert). These stations are over 2,000 km apart and reflect more open-ocean conditions, providing limited insight into the fetch-limited nearshore environments that dominate the Canadian Arctic Archipelago22. To address this gap, we present community-based hydrodynamic measurements collected between 2021 and 2023 in three Nunavut communities: Ausuittuq (Jones Sound), Ikaluktutiak, and Kugluktuk (Coronation Gulf). These sites were selected in close collaboration with local Hunters and Trappers Organizations (HTOs) and represent a range of coastal settings, from rocky shores to shallow, ice-affected bays in glacierized and unglacierized areas. Nearshore waves and water levels were recorded using bottom-mounted pressure sensors, while offshore directional wave statistics were obtained using wave buoys. Together, these measurements offer a unique, comprehensive view of coastal wave dynamics during the open-water season in the CAA.
This Data Descriptor documents the deployment and processing of nearshore pressure sensor data, the configuration and output parameters of offshore directional wave buoys, and the use of real-time kinematic GPS (RTK-GPS) coastal topographical profiles for precise sensor positioning. We also present an overview of data uncertainties related to wave statistics and water level measurements. The resulting pan-Nunavut hydrodynamic dataset is openly shared with Inuit stakeholders and provides valuable baseline information to support coastal management, infrastructure development, and numerical modelling efforts. It contributes to a growing body of knowledge on wave dynamics in ice-affected Arctic regions and supports community resilience to climate-driven coastal hazards.
Between 2021 and 2023, observations covered a total of 734 pressure sensor-days and 270 buoy-days. We recorded 117 unique days in Ausuittuq, 188 in Kugluktuk, and 93 in Ikaluktutiak, for a total of 398 unique site-days of wave and water level data. Overlapping deployments of pressure sensors and wave buoys occurred for 78 days in Ausuittuq, 92 days in Kugluktuk, and 28 days in Ikaluktutiak, providing valuable periods for assessing offshore-to-coastal wave and water level dynamics.
Methods
Study sites
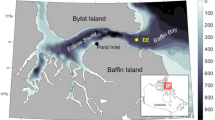
The three communities where field measurements were conducted are located in the continuous permafrost zone23, primarily along low-lying sandy coasts (Kugluktuk and Ikaluktutiak) or gravelly shores with rocky platforms (Ausuittuq) (Fig. 1). Following the retreat of the Laurentide and Innuitian Ice Sheets, which began around 13,000 years ago (calibrated, cal years BP), the coastlines in this region were deglaciated by approximately 9,500 cal years BP24,25,26. Glaciers are still present in Nunavut and on Ellesmere Island near Ausuittuq. Tides in the CAA are semi-diurnal, with a tidal wave propagating mainly from the Atlantic Ocean27. Tidal amplitude varies regionally, ranging from a few centimetres (microtidal) in the Kitikmeot Sea (Kugluktuk and Ikaluktutiak)28 to several meters (mesotidal) in Jones Sound near Baffin Bay (Ausuittuq). Offshore waves also vary spatially, mainly as a response to sea ice and geological setting: the enclosed channels and bays that form the CAA waterways are characterized by small significant wave height (Hs) generally under 2 m, in contrast with the open Baffin Bay and major sounds (Lancaster and Jones Sound), where waves can reach amplitude up to several meters high1.

The Canadian Arctic Archipelago encompasses the Northwest Territories (NWT) and Nunavut (NU). The study area covers Nunavut in three communities (white dots): Kugluktuk, Ikaluktutiak, and Ausuittuq. Instrument deployment locations are indicated in each community, where diamonds represent wave buoys and squares represent pressure sensors. Baffin Bay (BB), Jones Sound (JS), Coronation Gulf (CG), Ellesmere Island (EI), and Victoria Island (VI) are indicated.
In Kugluktuk, nearshore sensors were deployed in 3 main locations around the Coppermine River delta to acquire the wave conditions from various propagation directions: west of town on a low-lying beach, on the barrier island beach north of town, and east of the delta (Fig. 1). The sensors were deployed outside the estuary to minimize the influence of river-driven water-level variability. Nonetheless, in addition to recording astronomical tides, wave- and wind-induced setup, and atmospheric pressure effects, the measured water levels may still reflect a fluvial contribution, particularly west of town, where the main river channel enters the coastal zone. The offshore buoy was deployed at a depth of ~ 30 m, 800 m offshore the barrier island (2.4 km from the community) and was exposed to west-to-easterly waves. A similar mooring was done in Ikaluktutiak. There, the sensors were moored about 23 km west of town along the low-lying coastal terrace sitting south of an esker, a site locally known as Augustus Hill. This site is an erosion hotspot identified by community members as a critically changing area in terms of permafrost degradation and trail erosion29. The buoy was installed at a depth of 12 m, 450 m offshore. In Ausuittuq, because the bathymetry is highly variable along the coast30, multiple sensors were deployed along the shore to address longshore variability in nearshore wave characteristics. Sensors were deployed close to the upper foreshore and farther offshore on the rock platform, while the buoy was moored at a 30 m depth.
Instrument deployment strategy
The sampling strategy applied in this project aimed to quantify wave statistical parameters both offshore and near the shoreline (Figs. 2, 3), where wave energy dissipation processes in shallow water can induce a superelevation of the mean water level (MWL) above still water level (SWL), known as wave setup31,32. Such processes are not limited to ocean conditions and have also been observed in fetch-limited environments33,34. Deep-water wave measurements (i.e. before shoaling and breaking processes) were obtained using three-dimensional surface-displacement buoys positioned offshore of each site in deep waters at locations identified in collaboration with local Inuit organizations. In shallow waters, pressure sensors were deployed to measure total induced pressure, from which water depth and wave statistics were extracted. The combination of synchronous offshore and nearshore measurements enabled continuous quantification of both wave forcing and water levels throughout the deployment period, which took place mainly in ice-free conditions. The overall strategy was based on sea ice conditions, which also induced damage to some instruments, therefore limiting the joint duration of nearshore and offshore deployments in some cases. Following the breakup (mid-June to early August, depending on the latitude), all instruments were deployed for the open-water period duration and until sea ice brought navigation conditions too difficult for buoy maintenance.

Deployment timeline of pressure sensors and wave buoys across study sites. Gaps in the bars show sensor removal periods.
Nearshore pressure sensors
Sensor positioning
Pressure sensors (RBRvirtuoso3D, RBRsolo3D, RBRduet3TD, and custom-built pressure-based recorders, PBR) were installed at all sites using mooring techniques adapted to local seabed conditions. The RBR sensors, widely used in nearshore environments, are made of plastic casings rated for temperatures as low as −5° C. Their sizes ranged from 63.3 mm in diameter (virtuoso3) to 25.4 mm (duet3 and solo3D). The PBRs are low-cost, Arduino-based pressure sensors developed at the Université du Québec à Rimouski, designed for rapid deployment in harsh, ice-prone environments where more expensive instruments are at risk of damage. The PBRs used here were constructed from Acrylonitrile Butadiene Styrene (ABS) tubing and Arduino Mini Pro boards35. All sensors sampled at 4 Hz and were suitable for deployment in depths up to 10 m, enabling their combined use across sites.
In Ausuittuq, sensors (10 deployments in 2 years) were fixed on rocky outcrops using concrete anchors. RBRvirtuoso3 and PBR sensors were first deployed using an anchored metal plate bolted to rocks. When flat, rocky seabed conditions were present, the sensors were directly moored at the seabed. On altered seabed (i.e. weathered sedimentary rocks), low-lying boulders were used as anchors for the sensors’ metal plate brackets. This technique was abandoned as it was not efficient at this location because of the dense iceberg conditions (see the Technical Validation section for more information on harsh deployment conditions). Because of their much smaller size, RBRsolo3D were instead inserted directly into the rocky seabed or boulder to prevent damage from icebergs and sea ice. In Kugluktuk (4 deployments over 2 years) and Ikaluktutiak (3 deployments over 2 years), all sensors were secured to the seabed using off-the-shelf foundation screw posts in sediment.
Most nearshore pressure sensors were deployed on foot from the shoreline at low tide, using dry suits for safe access, or using local boats in offshore shallow area when beach access was blocked by ice (Fig. 3). Two sensors were deployed underwater from boats in Ikaluktutiak. While the ideal placement would be below the lowest tidal level to get the full tidal cycle, deployments were often constrained by the presence of sea ice, particularly multi-year ice and icebergs in Ausuittuq. In late Fall, the reformation of coastal ice further limited access to the lower intertidal zone. This deployment strategy prioritized safety and logistical feasibility, but resulted in some sensors being periodically exposed at low tide, thereby reducing the proportion of usable data. To ensure precise sensor positioning, location and elevation data (North American Datum of 1983 (NAD83) and Canadian Geodetic Vertical Datum of 2013 (CGVD2013)) were collected for all instruments using RTK-GPS (Emlid Reach RS2; horizontal precision: 7 mm + an additional error of 1 part per million (ppm), increasing with distance from the base station; vertical: 14 mm + 1 ppm) and installed along a cross-shore topographic transect. Each transect was surveyed with varying spacing between cross-shore topographical measurements depending on coastal complexity. Overall, profiles were processed and interpolated to 50 cm spacing. The reference beach profiles at each location were surveyed on August 8, 2022, in Ausuittuq, July 22, 2022, in Ikaluktutiak, and July 8-9, 2022, in Kugluktuk (Fig. 4).

Overview of the sensor deployment approach. From left (backshore) to right (offshore), RTK-GPS topographic profiles were conducted at low tide for sensor positioning in the nearshore zone. Wave buoys were deployed offshore using local boats in partnership with the Hunters and Trappers Organizations. Individuals depicted provided consent for the publication of the image.

Nearshore sensor locations across the coasts of Ausuittuq (A), Kugluktuk (B), and Ikaluktutiak (C). Colours indicate different locations within each community; dots indicate sensors and lines indicate shoreline profiles. In Ikaluktutiak, two pressure sensors are located farther offshore, but no topobathymetric data were available.
Data processing
Sampling protocols differed between the RBR and PBR pressure sensors (Fig. 5, 6, 7, 8). RBR instruments acquired data continuously at fixed sampling rates of 4, 8, or 16 Hz. PBR sensors recorded 512 s pressure bursts at 4 Hz starting each UTC hour, selected to capture sea–state variability in a shallow water environment with reduced power and storage demand (Table 1). This setting captures over 100 to 150 waves with 3-5 s periods, consistent with protocols validated in coastal field deployments36. All data sets were processed in MATLAB: raw RBR files (.rsk) were imported using the open source RSKtools toolbox, while PBR ASCII outputs (.txt) were structured using custom MATLAB scripts. Atmospheric pressure data were obtained from weather stations in Ausuittuq, Kugluktuk, and Ikaluktutiak, sourced from the Government of Canada’s historical climate data website (climate IDs 2402351, 2300904, and 2400603, respectively)37. These atmospheric pressure values were then subtracted from the raw sensor records to isolate the water pressure component by removing barometric effects from the measured signal. The resulting corrected pressure time series were converted to water levels under hydrostatic conditions (ABSOLUTE_WL variable), which were subsequently referenced to (WL_CGVD2013 variable). Readings collected at low tide, when sensors may have been exposed to air, were excluded from the analysis. Periods of missing data are associated with sensor removal due to ice conditions or scheduled maintenance. In the dataset, these interruptions appear as gaps corresponding to the times when the sensors were retrieved and later reinstalled (Fig. 2). Upon reinstallation, slight changes in mounting height may have occurred, resulting in small offsets in the recorded water level. These variations reflect differences in sensor positioning relative to the seabed, not actual changes in sea level or bathymetry.

Nearshore wave records from pressure sensors. (A,B) Ausuittuq (Aug 2021–Sep 2022); (C,D) Kugluktuk (Jul 2021–Oct 2022); (E,F) Ikaluktutiak (Aug 2022–Aug 2023). For each site, the left panel displays the significant wave height (Hs), and the right panel shows the corresponding peak wave period (Tp). The records plotted are from the bottom-mounted pressure sensor deployed closest to the coastline, providing the longest continuous series available for the given year at each site; sensor serial IDs are given in the legends. Axis colours match the plotted variables.

Nearshore water level records. (A,B) Ausuittuq (Aug 2021–Sep 2022); (C,D) Kugluktuk (Jul 2021–Oct 2022); (E,F) Ikaluktutiak (Aug 2022–Aug 2023). Each panel displays the water level (WL) time series referenced to the Canadian Geodetic Vertical Datum 2013 (CGVD2013). Data are from the bottom-mounted pressure sensor deployed closest to the coastline, which provides the longest continuous record for the indicated period at each site; sensor serial IDs are listed in the legends.

Wave climate offshore of Ausuittuq, Kugluktuk, and Ikaluktutiak during the 2021–2023 period. Panels A, C, and E show the distribution of significant wave height (H0), and panels B, D, and F show the distribution of peak wave period (Tp). The mean direction (Dm) is given in degrees clockwise from true north and indicates the incoming wave directions.

Comparison of significant wave heights measured by nearshore pressure sensors (Hs) and offshore buoys (H0). (A) Ausuittuq (Aug 2021–Sep 2022); (B) Kugluktuk (Jul 2021–Oct 2022); (C) Ikaluktutiak (Sep 2022–Aug 2023). Coloured markers show observations from pressure sensors (RBR or PBR) that overlapped in time with the offshore buoy (see Fig. 2); data from both deployment years were combined to produce a single scatter plot per site. The solid black 1:1 line denotes perfect agreement; coefficients of determination R2 quantify the fit for each site.
Surface wave statistics were derived from corrected pressure time series through spectral analysis. The pressure spectrum, Ep(f), where f denotes frequency, was computed using a fast Fourier transform (FFT). For RBR sensors sampled at 4 Hz, FFT were applied to 20-minute segments using a 1024-point Hanning window with 50% overlap. For PBR sensors, the same spectral analysis was performed on each burst segment (512 s, 2,048 samples), resulting in one spectrum per hour. To account for the differing sampling rates and maintain the same frequency resolution, pressure spectra for RBR sensors sampled at 8 Hz were computed using a 2,048-point Hanning window with 50% overlap, and those sampled at 16 Hz used a 4,096-point Hanning window with 50% overlap. The resulting pressure spectrum was then converted to a surface elevation spectrum, commonly referred to as the wave energy spectrum38 following
The pressure transfer function Kp, usually defined through linear wave theory, is expressed as
where D is the mean water depth, hd is the offset of the sensor above the seabed, and k is the radian wavenumber derived from the linear-theory dispersion relationship
where ω = 2πf and g is gravitational acceleration. To avoid the high-frequency noise amplification inherent in pressure-to-surface transfer in shallow water, we apply Kp only for f ≤ 0.40 Hz; for f > 0.40 Hz we use the hydrostatic approximation:
where ρ is the density of water.
The description of the sea state relies on the spectral moments of order n, defined as
where the integration limits \(({f}_{\min },{f}_{\max })\) correspond either to the full wave frequency band (0.008–0.5 Hz) or to its two sub-bands: infragravity waves (<0.05 Hz) and gravity waves (0.05–0.5 Hz). The significant wave height of each band is derived from the zeroth spectral moment using \({H}_{s}=4\sqrt{{m}_{0}}\). Accordingly, Hs for the full band is computed from the total spectrum, while the infragravity (Hs,IG) and gravity (Hs,SW) wave heights are obtained by integrating over their respective sub-bands. The peak period Tp is defined as the inverse of the peak frequency, i.e., \({T}_{p}=\frac{1}{{f}_{p}}\). The mean wave period Tm01 is computed as the ratio of the zeroth to the first spectral moment, Tm01 = m0/m1, and the mean zero-crossing period Tm02 is derived from the square-root of the ratio between the zeroth and the second spectral moments, \({T}_{m02}=\sqrt{{m}_{0}/{m}_{2}}\)39. All spectral periods (Tp, Tm01, and Tm02) are computed over the full wave frequency band (0.008-0.5 Hz). A summary of all deployment parameters and measurement periods is provided in Table 1.
Offshore buoys
Mooring locations
At all study sites, wave buoys (Spotter-V2 from Sofar Ocean©) were moored offshore. Each Spotter buoy was connected by a 10-meter-long rope to a floating buoy following the manufacturer’s guidelines, which was subsequently linked to a 100-pound rock anchor resting on the seafloor via a rope. All the moorings were deployed by local boats operated by local hunters. Ideally, each buoy would have been positioned directly in front of each site to record incoming waves in the cross-shore direction; however, to respect local hunting practices, they were deployed in safe areas for boat travel, hunters, and marine mammals as defined by local HTOs. In Ausuittuq, the buoy was also positioned away from icebergs, although sea ice was the primary factor in selecting the appropriate location. On September 3 2022, the buoy was damaged and lost abruptly under drifting sea ice.
Data processing
Most wave data used in this study were obtained directly from the Spotter buoy’s onboard SD card, rather than from the real-time online dashboard. This decision was taken to guarantee reproducibility and transparency in data processing, as well as to access full-resolution displacement time series for detailed spectral analysis. Exceptions occurred at two deployment sites, Ausuittuq (2022) and Kugluktuk (2022) (see Table 2), where the buoys were dislodged by sea ice and could not be recovered. As a result, it was not possible to retrieve the SD cards, and only the onboard-transmitted data was available for these deployments. The real-time dashboard-transmitted data are subject to onboard compression and pre-processing optimized for satellite transmission, which restricts access to the full-resolution displacement time series and spectral detail. In addition to enabling full spectral analysis and transparent post-processing, working with the raw displacement time series recorded on the Spotter buoy’s SD card allows for precise control over the temporal segmentation of the data. Real-time outputs available through the Spotter dashboard are based on segments initiated at arbitrary timestamps, determined by the exact moment the buoy begins sampling. This often results in time windows that are misaligned with standard UTC boundaries, which complicates direct comparison with model outputs or external observational datasets. In this study, all data segments that were generated offline from the raw SD card time series were aligned strictly with full UTC hours (e.g., 00:00, 03:00, 06:00), regardless of deployment mode (burst or continuous) or inter-burst interval. Maintaining alignment with full-hour UTC timestamps enhances compatibility with wave hindcast and forecast models, as well as with fixed-time reference observations. The value of such temporal alignment for a reliable model-data intercomparison has previously been emphasized40. It is important to note that the spectral mean period Tm02 is not part of the parameters output available through the Sofar Ocean online dashboard. For this reason, we derived Tm02 independently by computing it from the wave energy spectra obtained using the raw displacement data recorded on the buoy’s SD card.
The lower cut-off frequency of 0.05 Hz is further supported by findings from Work41, who observed that energy reported in the 0.03-0.05 Hz band often reflects artifacts rather than genuine wave signals. In his study, a persistent secondary energy peak in this frequency range remained even when the buoy was freely drifting, suggesting that the signal originated from internal sensor limitations rather than mooring effects. Consistent observations were also reported by Lancaster et al.42, who noted a slight energy excess in the 0.03-0.05 Hz band in Spotter buoy data when compared to co-located ADCP measurements. Moreover, for frequencies above 0.06 Hz, a field study by Collins et al.43 demonstrated good agreement between wave statistics derived from Spotter measurements and those obtained from pressure sensors in a co-located ADCP. While nearshore pressure sensors allow spectral analysis down to 0.008 Hz, we retained a conservative lower limit of 0.05 Hz for the Spotter data to remain within the instrument’s documented operational range and to avoid inclusion of unreliable low-frequency components. A uniform upper-frequency limit of 0.5 Hz was applied to both nearshore and offshore datasets. This ensures compatibility between spectra derived from pressure sensors and those from the buoy, and avoids discrepancies linked to sensor-specific frequency responses. The resulting 0.05-0.5 Hz band captures the bulk of wind-sea and swell energy, corresponding to wave periods from 2 to 20 seconds, and falls well within the effective range of the Spotter buoy44.
The frequency analysis used to extract the non-directional and directional spectra from onboard Spotter buoy data is performed within a selected frequency range (0.03-1 Hz)44, which has been optimized for open-ocean wave conditions45. However, in the coastal and semi-sheltered Arctic sites considered in this study, wave dynamics differ substantially due to limited fetch, complex coastal geometry, and seasonal sea ice cover. These areas are typically characterized by shorter-period, locally generated wind waves, with rare occurrence of long-period swell. For the period 1979–2005, extreme wave climate characteristics in the Canadian Arctic were assessed through hindcast simulations using the WAVEWATCH III (WW3) model forced by CFSR atmospheric reanalysis46. In Arctic sheltered environments such as those investigated in this study, maximum wave periods \({T}_{p,\max }\) generally range from 5 to 12 seconds (0.08-0.2 Hz), and maximum significant wave heights \({H}_{s,\max }\) typically fall between 1 and 2.5 m. These results confirm that a frequency range of 0.05 to 0.5 Hz is more suitable for capturing the full spectrum of sea state, including extreme events, at the selected Arctic coastal sites. It is therefore necessary to adopt a site-specific spectral analysis that does not rely on assumptions derived from open-ocean conditions.
The inertial GNSS package inside each Spotter buoy samples a three-dimensional displacement vector at a fixed rate of 2.5 Hz, regardless of the acquisition mode. The recorded displacement vector is expressed as:
where t is the time variable; X1(t) is the vertical motion and X2(t) and X3(t) are the horizontal displacements in the east and north directions, respectively. To ensure the reliability of the wave spectra derived from GPS-based buoy data, we applied a second-order Butterworth bandpass filter between 0.05 and 0.5 Hz to the displacement time series. This filtering step aims to eliminate low-frequency drift inherent to absolute GPS positioning, as well as to attenuate high-frequency noise related to buoy-induced vibrations47.
A spectral analysis was performed on the filtered horizontal and vertical displacement time series using a Fast Fourier Transform (FFT) applied over one-hour segments, with an 800-second Hanning window and 50% overlap. This analysis yielded: (i) three auto-spectra as functions, i.e. vertical (C11(f)), east (C22(f)), and north (C33(f)); (ii) three co-spectra (C12(f), C13(f), C23(f)), describing the in-phase covariance between directional components (east-north, east-vertical, and north-vertical); and (iii) three quadrature spectra (Q12(f), Q13(f), Q23(f)) capturing the out-of-phase (phase-shifted) relationships among these motions.
The vertical auto-spectrum was defined as
where X1(t) corresponds to the vertical displacement. Similarly, C22(f) and C33(f) were computed using the eastward (X2) and northward (X3) components, respectively. The three co-spectra and three quadrature spectra were derived from the complex cross-spectra S12(f)48, defined as
This complex quantity was decomposed into its real and imaginary parts as S12(f) = C12(f) − jQ12(f), where the real part C12(f) represents the co-spectrum, and the imaginary part Q12(f) corresponds to the quadrature spectrum48. The same formulation applies to C13(f), C23(f), Q13(f), and Q23(f), by substituting the appropriate displacement pairs.
Bulk wave parameters were computed within the 0.05–0.5 Hz frequency range over one-hour segments. Non-directional parameters, such as offshore significant wave height (H0), mean period (Tm01, Tm02), and peak period (Tp), were derived from the vertical displacement auto-spectra C11(f) using spectral frequency moments. Each spectral moment mn was computed as
where f is the frequency.
Directional wave parameters, including peak wave direction (Dp), mean wave direction Dm, peak directional spreading (PDS), and mean directional spreading (MDS), were estimated from the first-order Fourier moments a1(f) and b1(f), derived from the directional wave spectrum. These moments were calculated using the quadrature spectra Q12(f) and Q13(f), and the auto-spectra of vertical and horizontal displacements, C11(f), C22(f), and C33(f), as
The peak wave direction Dp was then computed at the peak spectral frequency fp following
while the peak directional spreading PDS was given by
The mean wave direction Dm was estimated by averaging a1(f) and b1(f) across the frequency band to obtain \({\bar{a}}_{1}\) and \({\bar{b}}_{1}\), then applying the following formula
Similarly, the mean directional spreading MDS was calculated as
For further details on the derivation of these directional parameters and the Fourier moment approach, the reader is referred to Kuik et al.49.
To quantify the impact of using only the Sofar online dashboard product for deployments where the SD card could not be recovered, we compared the dashboard significant wave height H0,dashboard with H0,processed recomputed offline from the raw displacement time series for one recovered buoy at Ausuittuq (2021), where both data sources were available (Fig. 9). The two estimates show very good agreement over the full deployment period (Fig. 9A), with a nearly one-to-one relationship between H0,processed and H0,dashboard (Fig. 9B). The best-fit linear regression is H0,processed = 0.93 H0,dashboard + 0.02 m, indicating only a small low bias in the dashboard product. We therefore expect that using dashboard data alone at Ausuittuq (2022) and Kugluktuk (2022) does not materially affect the conclusions of this study. However, the lack of SD-card data at these sites prevents full spectral re-analysis, temporal re-segmentation, and independent estimation of Tm02, which remains a limitation.

(A) Time series of significant wave height H0 from the dashboard product (H0,dashboard, black) and from the processed dataset (H0,processed, blue) in Ausuittuq in 2021. (B) Scatter plot comparing H0,processed and H0,dashboard. The black line indicates 1:1; the red line indicates the regression fit.
Data Records
The full dataset is openly available via Zenodo (https://doi.org/10.5281/zenodo.17049446)50. All processed wave and water properties parameters were structured and archived to facilitate reuse and ensure interoperability across Arctic study sites. The main variables retained in the final datasets are summarized in Table 3. It contains 25 .csv files organized into a clear folder hierarchy. Files are structured by site (Ausuittuq/, Kugluktuk/, Ikaluktutiak/), sensor type (pressure or buoy), and year. Within each sensor folder, the corresponding .csv files are systematically named according to site, sensor serial ID, year, and parameter type (e.g., WP for wave parameters). Each .csv file is a flat table in which each measured variable is stored as a dedicated column, using column headers that match the variable names listed in Table 3. Raw data is also included.
The metadata for all deployments is compiled in a .csv file. This file includes detailed information for both pressure sensors and buoys. For pressure sensors, it contains the sensor model, serial number, installation and removal dates, location (latitude and longitude in WGS84), and vertical positioning (Zmembrane and Zbottom relative to CGVD2013). Zmembrane refers to the sensor elevation obtained via RTK-GPS, while Zbottom corresponds to the seabed elevation at the deployment site. For buoys, the metadata includes serial model, deployment and retrieval dates, geographic coordinates (WGS84), and estimated water depth measured using a gauged rope at 0.5 m intervals.
Technical Validation
Sensor calibration
All pressure sensors from RBR were factory-calibrated before deployment, yielding a manufacturer reported accuracy of ± 0.05% of full-scale (FS). Comparisons between buoys and pressure sensors’ data in overlapping deployments showed consistent wave patterns, confirming sensor agreement and no time drift. Quality control involved excluding periods during low tide for pressure sensors, verifying atmospheric pressure corrections, and visually inspecting spectral outputs.
The homemade PBR sensors were validated in the field in Ausuittuq in 2021, between August 11 and September 6 (Fig. 10A,B). The validation period took place at the sensor #205653 location (z = − 1.64 m, CGVD2013). The sensor was subsequently destroyed by an iceberg (Fig. 11F), but the recoverable data was only used for sensor validation.

Validation of the PBR sensor in Ausuittuq in 2021. (A) Time series of significant wave height (Hs) from the RBR (blue) and PBR (black) sensors. (B) Scatter plot comparing RBR and PBR Hs. The black line indicates 1:1; the red line indicates the regression fit.

Sea ice makes wave and water-level observations difficult. (A,B) Shore-fast ice can be grounded on the beach and directly impact sensors that are anchored in shallow areas. (B,C) Drifting sea ice causes the buoys to drift away, and cold air temperatures induce the formation of a thick layer of ice on the buoy’s top solar panel. The Ausuittuq buoy is indicated by the yellow x in panel D. (D,E) Grounded icebergs can destroy moored sensors down to several metres depth.
During validation, the PBR sensor closely matched the RBR reference, with a linear regression yielding R2 = 0.9987 (p < 10−12), a slope of 1.0256, and an intercept of − 0.0047. The root mean square error (RMSE) of 0.0085 confirms excellent agreement between datasets.
Impacts of ice-infested waters on deployments
The most difficult part of monitoring coastal ocean waves and water levels in the CAA is maintaining a steady sensor position over time under very harsh conditions. Sea ice and icebergs are the most damaging exterior forces acting against the sensors, and pressure sensors can be damaged by cold air temperature at low tide. During the deployment periods, the most common difficult situations were caused by drifting sea ice that would anchor at the seabed during low tides (Fig. 11A,B). Offshore, wave buoys were subject to sea ice drift that would lift the buoys and transport them further offshore. In 2022, the buoy was completely lost in Ausuittuq after a strong longshore current brought and destroyed the buoy offshore, 120 km west of the site in Jones Sound (Fig. 11C). In some cases, the buoy would become stuck in ice water leads, or would get frozen on the top as a result of cold air temperature (Fig. 11D). Finally, in Ausuittuq, icebergs were commonly grounded in the nearshore area, forcing the retrieval of bottom-mounted sensors, and destroying others that were still anchored at the seabed (Fig. 11E,F). To avoid such situations, the collective group and local partners made efforts to retrieve all nearshore sensors and buoys before the sea ice freeze-up.
Data availability
The full dataset is openly available via Zenodo under the https://doi.org/10.5281/zenodo.17049446.
Code availability
Custom MATLAB scripts developed to read and process the raw data are available through the following GitLab repository: (https://gitlab.uqar.ca/lnar1/lnar-arctic-hydro).
References
Casas-Prat, M. & Wang, X. L. Sea ice retreat contributes to projected increases in extreme arctic ocean surface waves. Geophysical Research Letters 47, https://doi.org/10.1029/2020GL088100 (2020).
Wilson, K. et al. “When we’re on the ice, all we have is our Inuit Qaujimajatuqangit”: Mobilizing inuit knowledge as a sea ice safety adaptation strategy in Mittimatalik, Nunavut. Arctic (2022).
Fawcett, D., Pearce, T., Notaina, R., Ford, J. D. & Collings, P. Inuit adaptability to changing environmental conditions over an 11-year period in ulukhaktok, northwest territories. Polar Record (2018).
Ford, J. D. et al. Changing access to ice, land and water in arctic communities. Nature Climate Change (2019).
Nielsen, D. M. et al. Increase in arctic coastal erosion and its sensitivity to warming in the twenty-first century. Nature Climate Change 12, 263–270, https://doi.org/10.1038/s41558-022-01281-0 (2022).
Wang, Z. et al. Arctic coastal hazard assessment considering permafrost thaw subsidence, coastal erosion, and flooding. Environmental Research Letters 18, 104003, https://doi.org/10.1088/1748-9326/acf4ac (2023).
Tanguy, R. et al. Pan-arctic assessment of coastal settlements and infrastructure vulnerable to coastal erosion, sea-level rise, and permafrost thaw. Earth’s Future 12, https://doi.org/10.1029/2024EF005013 (2024).
St-Hilaire-Gravel, D., Bell, T. J. & Forbes, D. L. Raised gravel beaches as proxy indicators of past sea-ice and wave conditions, lowther island, canadian arctic archipelago. ARCTIC 63, https://doi.org/10.14430/arctic976 (2010).
Didier, D. et al. Community-based monitoring to understand the changing coastal ocean in jones sound, nunavut. In Abstracts of the 2024 Ocean Sciences Meeting (New Orleans, Louisiana, https://agu.confex.com/agu/OSM24/meetingapp.cgi/Paper/1486934 2024).
Ford, J. D. et al. Projected decrease in trail access in the arctic. Communications Earth & Environment 4, https://doi.org/10.1038/s43247-023-00685-w (2023).
Meier, W. N., Stroeve, J. & Gearheard, S. Bridging perspectives from remote sensing and inuit communities on changing sea-ice cover in the baffin bay region. Annals of Glaciology (2006).
White, P. L. et al. Shifting phytoplankton ecological strategies along a continuum of tidewater glacier retreat. ISME Communications 5, ycaf045, https://doi.org/10.1093/ismeco/ycaf045 (2024).
Durap, A. Data-driven models for significant wave height forecasting: Comparative analysis of machine learning techniques. Results in Engineering 24, 103573 (2024).
Gimsa, J., Fritz, M. & Lantuit, H. Nearshore Hydrodynamics and Sediment Dispersal Along Eroding Permafrost Coasts—Insights From Acoustic Doppler Current Profiler Measurements Around Herschel Island-Qikiqtaruk (Yukon, Canada). Permafrost and Periglacial Processes 1–12 (2025).
Glover, H. E., Wengrove, M. E. & Holman, R. Measuring hydrodynamics and exploring nearshore processes using distributed sensing of fiber-optic cable strain. Coastal Engineering 190, 104487, https://doi.org/10.1016/j.coastaleng.2024.104487 (2024).
Wong, C., Ballegooyen, K., Ignace, L., Johnson, M. J. & Swanson, H. K. Towards reconciliation: 10 calls to action to natural scientists working in canada. Facets (2020).
Kanatami, I. T. National inuit strategy on research https://www.itk.ca/wp-content/uploads/2020/10/ITK-National-Inuit-Strategy-on-Research.pdf Accessed: 2023-10-01 (2020).
Scharffenberg, K. et al. Environmental drivers of beluga whale delphinapterus leucas habitat use in the mackenzie estuary, northwest territories, canada. Marine Ecology Progress Series 626, pp. 209–226 (2019).
Lee, R. E., Whalen, D., Scharffenberg, K., MacPhee, S. & Loseto, L. L. Spatial and temporal impacts of climate change to the tarium niryutait marine protected area, beaufort sea, canada. Arctic Science 11, 1–23, https://doi.org/10.1139/as-2024-0039 (2025).
Carter, N., Dawson, J., Simonee, N., Tagalik, S. & Ljubicic, G. Lessons learned through research partnership and capacity enhancement in inuit nunangat. Arctic (2019).
Inuit Tapiriit Kanatami. Inuit Nunangat Coastline Length and Land Area Calculations. Tech. Rep., Inuit Tapiriit Kanatami (2022).
Taylor, R. B. & McCann, S. B. Coastal depositional landforms in northern canada. In Dawson, S. (ed.) Shorelines and Isostasy, 53–77 (Special publication) (Institute of British Geographers, London, UK, 1983).
Brown, J., Ferrians, O., Heginbottom, J. & Melnikov, E. Circum-arctic map of permafrost and ground-ice conditions Circum-Pacific Map Series CP-45, scale 1:10,000,000, 1 sheet (1997).
Dalton, A. S. et al. Deglaciation of the north american ice sheet complex in calendar years based on a comprehensive database of chronological data: Nadi-1. Quaternary Science Reviews 321, 108345 (2023).
Jennings, A. et al. Retreat of the boothia-lancaster ice stream from its last glacial maximum extent and its role in the origin of baffin bay detrital carbonate (bbdc) events 0, 1 and 2. Quaternary Science Reviews 358, 109353, https://doi.org/10.1016/j.quascirev.2025.109353 (2025).
Dyke, A. et al. The laurentide and innuitian ice sheets during the last glacial maximum. Quaternary Science Reviews 21, 9–31, https://doi.org/10.1016/S0277-3791(01)00095-6 (2002).
Kleptsova, O. & Pietrzak, J. High resolution tidal model of canadian arctic archipelago, baffin and hudson bay. Ocean Modelling 128, 15–47, https://doi.org/10.1016/j.ocemod.2018.06.001 (2018).
Rotermund, L. M. et al. The effect of sea ice on tidal propagation in the kitikmeot sea, canadian arctic archipelago. Journal of Geophysical Research: Oceans 126, https://doi.org/10.1029/2020JC016786 (2021).
Gagnon, S. et al. Coastal gullies formed by piping on a permafrost marine terrace near iqaluktuuttiaq (cambridge bay), nunavut, canada. Geomorphology 486, 109905, https://doi.org/10.1016/j.geomorph.2025.109905 (2025).
Eamer, J., Stancu, C., Normandeau, A. & Didier, D. R/V Nuliajuk expedition 2022Nuliajuk: seabed mapping and marine geohazards in Grise Fiord, near Ausuittuq, Nunavut. Open File 8935, Geological Survey of Canada https://doi.org/10.4095/331355 (2022).
Raubenheimer, B., Guza, R. T. & Elgar, S. Field observations of wave-driven setdown and setup. Journal of Geophysical Research Atmospheres (2001).
Stockdon, H. F., Holman, R. A., Howd, P. A. & Sallenger, A. H. Empirical parameterization of setup, swash, and runup. Coastal Engineering 53, 573–588 (2006).
Didier, D. et al. Wave runup parameterization for sandy, gravel and platform beaches in a fetch-limited, large estuarine system. Continental Shelf Research 192, 104024 (2020).
Toomey, T. et al. Wave setup estimation at regional scale: Empirical and modeling-based multi-approach analysis in the mediterranean sea. Weather and Climate Extremes 44, 100685 (2024).
Baudry, J., Nicot, P., Lacasse, F.-A. & Dumont, D. A Synchronised Pressure Gauge Array (SPaGAtt) for measuring wave directional spectra in coastal ice-covered waters https://doi.org/10.13140/RG.2.2.15272.99849 Presented at the Assemblée Générale de Québec-Océan 2023, Rivière-du-Loup, February 6–7 (2023).
Stone, G. W., Wang, P. & Zhang, X. Wave height measurements at the raccoon island breakwaters demonstration projection (te-29) project – report on october 1997 field deployment. Technical Report, Coastal Studies Institute, Louisiana State University, Baton Rouge, LA Coastal Engineering Report (1998).
Environment and Climate Change Canada. Historical climate data Government of Canada. https://climate.weather.gc.ca/historical_data/search_historic_data_e.html Accessed July 21, 2025 (2025).
Lee, D.-Y. & Wang, H. Measurement of surface waves from subsurface gage. Coastal Engineering Proceedings 1, 19 (1984).
Holthuijsen, L. H.Waves in Oceanic and Coastal Waters (Cambridge University Press, 2007).
Kinsela, M. A. et al. Nearshore wave buoy data from southeastern Australia for coastal research and management. Scientific Data 11, 1–21 (2024).
Work, P. A. Nearshore directional wave measurements by surface-following buoy and acoustic Doppler current profiler. Ocean Engineering 35, 727–737 (2008).
Lancaster, O., Cossu, R., Boulay, S., Hunter, S. & Baldock, T. E. Comparative wave measurements at a wave energy site with a recently developed low-cost wave buoy (Spotter), adcp, and pressure loggers. Journal of Atmospheric and Oceanic Technology 38, 1019–1033 (2021).
Collins, C. O. et al. Performance of moored GPS wave buoys. Coastal Engineering Journal 66, 17–43, https://doi.org/10.1080/21664250.2023.2295105 (2024).
Sofarocean. Spotter user guide https://content.sofarocean.com/hubfs/Spotter Accessed July 24, 2025 (2021).
Rossi, G. B. et al. Improvement in the Post-Processing of Wave Buoy Data Driven by the Needs of a National Coast and Sea Monitoring Agency. Sensors 23 (2023).
Casas-Prat, M. & Wang, X. L. Projections of extreme ocean waves in the arctic and potential implications for coastal inundation and erosion. Journal of Geophysical Research: Oceans 125, https://doi.org/10.1029/2019JC015745 (2020).
Raghukumar, K. et al. Performance characteristics of “spotter,” a newly developed real-time wave measurement buoy. Journal of Atmospheric and Oceanic Technology 36, 1127–1141 (2019).
Thomson, R. E. & Emery, W. J. Data Analysis Methods in Physical Oceanography 3rd edn (Elsevier, 2014).
Kuik, A. J., van Vledder, G. P. & Holthuijsen, L. H. A method for the routine analysis of pitch-and-roll buoy wave data. Journal of Physical Oceanography 18, 1020–1034 (1988).
Didier, D. et al. Community-based nearshore wave and water level monitoring along the Nunavut coast of the Canadian Arctic Archipelago (2021–2023). Zenodo https://doi.org/10.5281/zenodo.17049447 (2025).
Acknowledgements
We are grateful to the communities of Ikaluktutiak, Kugluktuk and Ausuittuq, and the Hunter and Trappers Organizations in all communities for welcoming us, and the Canadian High Arctic Research Station (CHARS) for hosting us and providing logistical support. This work was conducted under the 04 018 21N-M, 04 015 23R-M, 02 014 22R-M and 02 029 23R-M permits from the Nunavut Research Institute, screened by the Nunavut Research Impact Review Board (#18YN020, #19YN020 and #21YN021). The project was reviewed by the Nunavut Planning Commission (#149466, #149497, #149748, #149749 and #150058). We also want to thank the Polar Continental Shelf Program (PCSP) team in Resolute and Ottawa. We underline the crucial work done by PCSP to support research initiatives in the Canadian Arctic and to help us conduct partnerships with local organizations in Nunavut. We thank Crown-Indigenous Relations and Northern Affairs Canada, the Natural Sciences and Engineering Research Council of Canada (RGPIN-2024-04226 and RGPIN-2021-03333) and the NFRF Explorations Fund (NFRFE-2018-01427) for their financial support. This work was also supported by the Polar Continental Shelf Program (grants #66822, #64123 and #63623). Many students in the research team also received funding supports from the Northern Scientific Training Program (NSTP) under Polar Knowledge Canada.
Author information
Authors and Affiliations
Contributions
D.D., T.N., S.C., M.B., E.B. and J.S. conceptualized the project with contributions from L.A.W., J.Q., and G.F. The ideation and coordination of data collection were carried out by D.D., S.C., J.S. and T.N. Data was gathered by D.D., S.C., T.N., J.S., C.J-B., J.B., S.B., R.A., B.N., A.B., D.Dub., B.B., G.F., L.L., O.O., C.S., C-A.G., H.B.S., P.W., A.H.D., D.M.R.W., D.H., C.P., J.S., Y.Q., S.G. and J.E. Figures were created by D.D. and F.Z. The main manuscript was written by D.D. and F.Z., with supplementary writing contributions from S.C., J.S., A.N., J.E., G.C., B.K., F.B., S.B., S.G., Y.Q. and E.B. J.B. and P.N. designed and built the home-made instruments. F.Z. processed the data and developed the MATLAB codes, with contributions from J.B. and D.D. D.D., M.B., S.C., A.H., F.B., B.K., G.C., S.Bel., D.Dum., A.N. and P.M. contributed on project administration and funding acquisition, and all authors reviewed the manuscript.
Corresponding author
Ethics declarations
Competing interests
The authors declare no competing interests.
Additional information
Publisher’s note Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution-NonCommercial-NoDerivatives 4.0 International License, which permits any non-commercial use, sharing, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if you modified the licensed material. You do not have permission under this licence to share adapted material derived from this article or parts of it. The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by-nc-nd/4.0/.
About this article

Cite this article
Didier, D., Zouaghi, F., Coulombe, S. et al. Community-based nearshore wave and water level monitoring in Nunavut, Arctic Canada 2021–2023. Sci Data 13, 239 (2026). https://doi.org/10.1038/s41597-026-06559-y
Received:
Accepted:
Published:
Version of record:
DOI: https://doi.org/10.1038/s41597-026-06559-y
