
Abstract
India’s transition to electric mobility demands charging infrastructure that is cost-efficient, grid-compatible, and capable of integrating solar generation. Existing studies typically examine demand forecasting, PV utilisation, charging-topology behaviour, and economic viability in isolation, limiting their relevance for large-scale deployment. This work proposes a unified co-design framework that jointly optimises charging-station siting, charger sizing, PV allocation, and operational economics under India’s tariff structure. Hourly EV demand is predicted using a hybrid forecasting model that combines Temporal Fusion Transformers with Graph Neural Networks to capture spatial and temporal variations. Solar-generation modelling, topology-based charger efficiencies, and distribution-grid constraints are incorporated into a techno-economic formulation. A multi-objective optimisation approach (NSGA-II) identifies configurations that minimise cost, reduce peak grid loading, and maximise solar utilisation. The framework is demonstrated using a representative mixed urban–highway region. Results show a 28–35% reduction in peak grid load, a 40–70% improvement in utilisation, and a 12–18% decrease in the levelised cost of charging compared with non-optimised deployments. The findings highlight the importance of integrated planning that aligns solar availability, demand behaviour, and tariff incentives. The proposed methodology offers a scalable decision-support tool for policymakers, utilities, and private developers planning future EV charging networks in India.
Similar content being viewed by others

Introduction
The rapid electrification of transport worldwide is reshaping energy systems, creating new challenges in grid management, infrastructure planning, and renewable-energy integration. India’s transition towards electric mobility has emerged as a central component of national energy and climate strategy, supported by falling battery prices, renewable-energy growth, and strong industrial policy incentives. The Global EV Outlook 2025 highlights that while global EV penetration continues to rise rapidly, emerging economies such as India face distinct challenges related to infrastructure readiness, grid integration, and regional deployment disparities1. National studies similarly report that India’s EV ecosystem remains in its formative stage, with persistent gaps in charging-station density, spatial accessibility, and economic viability across states and urban centres2. At the same time, technical advancements in photovoltaic modelling and parasitic-aware performance estimation have strengthened opportunities to integrate solar energy into charging infrastructure, enabling more efficient and predictable renewable utilisation3.
Growing international evidence reinforces that EV adoption reshapes economic, environmental, and social systems, requiring coordinated planning to manage grid stress, ensure affordability, and promote equitable mobility access4. In India, these issues are compounded by accelerating EV demand across two-wheelers, three-wheelers, and passenger cars, creating pressure to deploy infrastructure faster than traditional distribution networks can be upgraded. Within India’s charging-infrastructure landscape, photovoltaic generation is not only an auxiliary source but an essential enabling technology for reducing operational expenditure and improving grid compatibility. The availability of high solar insolation across most Indian regions, together with falling PV-system costs, makes solar-aligned charging an attractive planning strategy for both public and highway-based charging networks. In this context, PV technology must be understood not only from a device-efficiency perspective but as an integral component of station-level techno-economic performance and tariff-aligned operation. Recent advancements in control and power-conversion strategies, including enhanced MPPT and parasitic-aware PV modelling, further strengthen the feasibility of solar-integrated charging deployments in India5. Recent advances in active-power control and enhanced MPPT algorithms for grid-tied PV systems further support the viability of solar-aligned EV charging by maximising renewable utilisation under dynamic operating conditions5. Meanwhile, system-dynamics studies reveal that urban EV expansion significantly influences energy demand patterns and emissions trajectories, underscoring the need for grid-aware and renewable-integrated charging strategies6. As charging networks expand, cybersecurity risks and cyber-physical vulnerabilities associated with EV–grid interactions have also emerged as critical concerns, necessitating intelligent, AI-enhanced architectures to ensure secure operation7.
Beyond national considerations, global technological shifts—particularly Vehicle-to-Home (V2H), Vehicle-to-Vehicle (V2V), and Vehicle-to-Grid (V2G) functionalities—demonstrate the potential of electric vehicles to operate as distributed energy assets, although their large-scale deployment requires coordinated charging strategies and robust power-electronic integration8. Coupling fast charging with storage and renewable generation has been shown to reduce grid dependence and enhance flexibility, particularly in environments with constrained feeder capacity or low grid-connection availability9. However, unmanaged EV charging continues to pose significant technical challenges, including peak-load surges, voltage deviations, and accelerated transformer aging—issues well-documented in distribution-network studies10. Alongside these grid-integration concerns, optimised PV system design using bio-inspired algorithms has demonstrated improvements in energy yield under complex environmental conditions, reinforcing the relevance of advanced optimisation in EV–PV co-design11.
International literature emphasises that integrating solar PV with EV charging can substantially reduce operating costs, enhance environmental performance, and improve grid friendliness—yet market barriers, technical constraints, and regulatory limitations continue to restrict large-scale deployment12. Improvements in integrated charger–converter architectures, such as high-efficiency motor-drive and isolated charging systems, have further expanded design options for next-generation EV hubs13. Fuzzy-logic-based and hybrid converter control topologies also provide enhanced efficiency, redundancy, and load-management capabilities that are particularly important for multi-charger public stations14. At the operational scale, coordinated charging methods and intelligent scheduling have been shown to reduce peak power draw and improve utilisation across diverse mobility applications15. Evaluations of social and economic impacts of EV adoption further highlight the need for infrastructure planning that supports broader sustainability goals while ensuring affordability for end users16.
Microgrid-based PV–battery architectures provide additional pathways to improve reliability, reduce local grid stress, and support dynamic loading environments—an insight that reinforces the importance of integrated energy-management approaches17. Meanwhile, hybrid fuzzy–MPC strategies for fast charging and thermal management show that real-time optimisation can significantly enhance charging performance while maintaining battery safety and grid support18. Global reviews on high-power charging-station planning highlight gaps in siting, sizing, and long-term investment strategies, especially for fast-charging corridors19. Classic studies on smart charging also demonstrate that controlled charging can substantially improve grid performance and increase renewable-energy utilisation when integrated with variable solar and wind resources20,21. Complementary surveys classify a broad range of energy-management schemes for EV charging stations, underscoring the need for planning tools capable of capturing grid, market, and behavioural interactions simultaneously22. Research on hybrid renewable-powered EV charging stations also shows that stability, power quality, and harmonic mitigation must be incorporated into design frameworks to ensure real-world feasibility23.
Economic and environmental analyses further reveal that the benefits of EV charging depend heavily on battery technology, local energy-mix composition, and region-specific tariff structures—factors that directly influence charging cost and renewable utilisation potential24. The socio-technical dimension of EV adoption, including user perceptions of V2G and smart-charging technologies, also affects the likelihood of widespread EV–grid integration and must therefore be considered in planning frameworks25. Emerging optimisation models for EVCS placement in active distribution networks demonstrate that optimal siting can significantly improve solar utilisation, reduce losses, and enable storage integration26. Finally, recent reviews of fast-charging-station allocation and sizing techniques emphasise the need for multi-objective optimisation approaches capable of balancing cost, grid impact, utilisation, and renewable penetration under realistic operating constraints27,28,29. Several recent studies conducted in the Indian context have examined the interaction between EV-charging infrastructure and electricity-grid conditions, particularly in states with high renewable-energy penetration. These works emphasise the importance of coordinated siting, tariff-linked charging strategies and local network constraints in determining the techno-economic performance of public charging systems. The present study extends this line of research by integrating solar-generation interaction, tariff differentiation and multi-objective planning within a unified optimisation framework30.
A review of prior work indicates that most studies analyse individual subsystems—such as demand forecasting, PV sizing, charging-topology behaviour, or economic viability—in isolation. However, large-scale deployments in India require an integrated representation of these interacting elements because tariff rules, spatial demand heterogeneity, and converter-efficiency behaviour jointly influence cost and grid impact. Existing studies seldom incorporate India’s differentiated EV-charging tariff structure, nor do they combine spatio-temporal AI-based demand forecasting with multi-region optimisation that spans urban clusters and highway corridors. These limitations reveal the need for a unified techno-economic co-design framework that simultaneously models demand behaviour, solar utilisation, charger topology, grid constraints, and financial outcomes—a research gap addressed in this study.
Addressing these gaps requires a unified modelling environment capable of combining forecasting, technical modelling, and tariff-aware optimisation under region-specific constraints. This work makes the following key contributions:
-
A unified AI-enabled planning framework that integrates demand forecasting, solar-generation modelling, tariff-aware cost modelling, converter-topology characterization, and grid-constraint evaluation within a single optimisation environment.
-
A spatio-temporal forecasting engine that combines Temporal Fusion Transformers with Graph Neural Networks to capture both temporal usage patterns and spatial interactions among mobility zones.
-
A multi-region evaluation approach that simultaneously models urban clusters and highway corridors, reflecting India’s blended travel behaviour and ensuring applicability across metropolitan and inter-city environments.
-
A multi-objective optimisation formulation that jointly minimises deployment cost, reduces peak grid load, and maximises solar utilisation, yielding Pareto-optimal configurations for planners and operators.
-
A policy-aware techno-economic assessment that embeds India’s latest EV-charging guidelines, providing directly actionable insights for utilities, private developers, and regulatory agencies.
The remainder of this paper builds on the above motivations and contributions. Chapter 2 introduces the integrated modelling framework, including the forecasting engine, solar-generation model, charger-topology representation, and economic formulations. Chapter 3 presents the data design, system boundary, and case-study configuration. Chapter 4 discusses the performance of the proposed framework across multiple scenarios, followed by policy implications and concluding remarks in Chapter 5.
AI-driven co-design framework
The proposed AI-driven co-design framework integrates predictive modelling, solar-generation estimation, charger-topology characterisation, grid-interaction assessment, and economic calculations into a unified optimisation environment. Unlike traditional planning approaches that evaluate siting, sizing, and economics in isolation, this framework embeds technical and financial dependencies directly into model equations, enabling realistic scenario evaluation under India’s 2024 tariff and regulatory structure.
The proposed framework integrates forecasting, solar-generation modelling, grid constraints, power-electronic behaviour, and techno-economic analysis within a single optimisation environment. Each modelling block exchanges information with the others, ensuring that system design captures real operating conditions. Forecasted charging demand drives technical sizing, solar availability informs energy balance, and grid constraints limit feasible configurations. These interconnected layers make the optimisation process more realistic compared with traditional planning methods. This section describes each modelling component in a structured manner and outlines how they interact in the unified workflow.
Integrated modelling structure
The co-design model links five domains:
-
AI-based charging-demand prediction
-
Solar-generation availability and tariff-aware energy cost
-
Charging-topology efficiency and electrical performance
-
Grid-interaction modelling
-
Economic performance modelling
These components operate in a closed loop where predicted demand drives technical calculations, which in turn determine financial outcomes. This integrated structure ensures that final design decisions reflect the true operational behaviour of EV charging systems. For clarity, GHMC refers to the Greater Hyderabad Municipal Corporation, while ORR denotes the Outer Ring Road corridor surrounding the metropolitan region. These terms are used to distinguish the dense urban activity zones from the high-speed highway-mobility belt considered in the case study. Figure 1 illustrates the modelling workflow.

AI-driven co-design framework for solar-integrated EV charging infrastructure.
The forecasting model uses a structured set of spatial and temporal features that represent mobility behaviour and environmental conditions. Temporal inputs include hour-of-day, day-of-week, holiday markers, and short-term historical charging patterns. Spatial features capture land-use type, road-network connectivity, nearby commercial activity, and vehicle-segment distribution. These features are normalised and encoded to improve learning consistency across nodes. The inclusion of both spatial and temporal attributes allows the model to capture demand variability more accurately than purely time-series approaches.
Charging-demand prediction model
Forecasting hourly EV charging profiles is essential because utilization directly affects energy flows, PV usage, and financial performance which is shown in Fig. 2. Conventional standalone LSTM-based forecasting approaches have shown good performance for short-term demand prediction; however, several recent studies report reduced robustness when spatial variability and heterogeneous temporal patterns are present, motivating the adoption of hybrid CNN–LSTM architectures that capture both temporal dependence and spatial feature structure. A CNN–LSTM hybrid model is adopted in this work because it captures spatial correlations through convolutional feature extraction and temporal dependence through recurrent learning, providing stable performance under heterogeneous traffic-mobility patterns. Graph-learning approaches were considered; however, they require explicit graph-structured mobility relationships and dense adjacency information, which are not available for all study locations in the present dataset. The CNN–LSTM framework therefore offers a balanced trade-off between accuracy, data availability and reproducibility. In this study, the spatial representation adopted for the demand-forecasting task follows an implicit grid-based structure rather than an explicit graph adjacency model. Each candidate charging node is characterised by a set of descriptive attributes, including its hourly demand profile, land-use category and accessibility features, which are incorporated as feature channels within the CNN stage. This approach enables the model to capture spatial correlations through convolutional feature extraction while maintaining reproducibility, since it does not require a fixed adjacency matrix or predefined network connectivity assumptions across nodes.

Architecture of the hybrid temporal fusion transformer (TFT) and graph neural network (GNN) for spatio-temporal EV load forecasting.
This framework uses Temporal Fusion Transformers (TFT) for time-series learning and Graph Neural Networks (GNN) for spatial dependency modelling. Let xs (t) represent the feature vector for location s at hour t, including traffic intensity, land-use attributes, EV mix, and temporal indicators. The predicted hourly charging demand is modeled as:
The spatial structure of the study area is represented using a graph in which each node corresponds to an urban cluster, transit hub, or highway junction. Edges are formed based on geographical proximity and observed mobility flows between regions. The adjacency matrix is normalised to stabilise training and ensure balanced propagation of spatial information. This representation enables the model to learn how activity in one zone influences neighbouring areas, which is especially important in dense urban regions and highway corridors where travel flows are strongly interconnected.
The TFT module captures temporal non-linearities, while GNN propagates information through connected mobility zones (urban clusters and highway segments). The output is an hourly load curve used in all downstream modelling.
Model training follows a supervised learning approach using synthetic mobility sequences generated from representative travel patterns. The dataset is divided into training, validation, and test sets using a time-aware split to prevent information leakage. Early stopping, dropout regularisation, and learning-rate scheduling are employed to avoid overfitting. Forecast accuracy is evaluated using MAE, RMSE, and R2 to ensure robustness across high- and low-activity regions. This structured training approach ensures that the model generalises well to unseen mobility behaviour.
Solar-energy and tariff interaction model
Solar energy availability is modelled using hourly irradiance G(t) and derating-adjusted output:
where APV is the installed array area and ηsys is the combined efficiency.
Hourly solar generation is adjusted for environmental losses such as module temperature rise, dust accumulation, wiring losses, and inverter efficiency. A temperature-corrected efficiency factor is applied using the manufacturer’s temperature coefficient to reflect realistic field performance. Cloud cover variability is incorporated through the irradiance dataset to ensure that the model captures both clear-sky and partially cloudy conditions typical in Indian climates. India’s 2024 EV tariff30 rules divide operation into:
-
Solar hours: 09:00–16:00 at 0.7 × ACoS
-
Non-solar hours: remaining hours at 1.3 × ACoS
The annualised cost of supply (ACoS), representing the equivalent annualised electricity cost under the applicable tariff structure, is expressed as:
This explicit tariff formulation is critical for modelling OPEX and solar-aligned charging benefits.
Charging-topology modelling
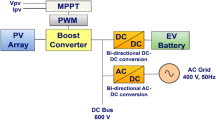
The electrical performance of charging stations is governed by converter topology. Three topologies considered—series, parallel, and multi-stage—exhibit different efficiencies, voltage-handling capabilities, and cooling requirements. The generalized block diagram of the Charging system is shown in Fig. 3.

PV integrated charging system.
The efficiency model assumes that converter losses arise from switching devices, magnetic components, and thermal behaviour. Series configurations are modelled with higher voltage capability but reduced redundancy, whereas parallel configurations allow better current sharing and fault tolerance. Multi-stage architectures include an intermediate DC link and achieve balanced efficiency across a wide load range. The efficiency curves are derived from representative charger specifications and scaled to match typical Indian deployment scenarios.This representation follows standard charger-converter loss modelling practices in which switching losses, magnetic-core losses, and thermal-dependent conduction losses collectively determine part-load and rated-load efficiency behaviour, as reported in prior studies on EV charger and power-electronic architectures13,14. For a given topology k, charger efficiency is approximated as:
where:
-
Series topologies: high voltage, lower redundancy.
-
Parallel topologies: modular, high redundancy.
-
Multi-stage: balanced performance for mid-to-high power chargers.
-
ηk(P) = rated efficiency of topology k,
-
P = operating charger power,
-
Prated = nominal charger power rating,
-
αk = topology-specific efficiency-curvature factor used to represent part-load scaling behaviour.
Equation (5) represents the part-load efficiency behaviour of the charger for a given converter topology k. The efficiency ηk(P) varies as a function of the operating power P relative to the rated charger power Prated, with ηk denoting the nominal rated efficiency and αk acting as a curvature factor that captures switching, conduction and magnetic losses under partial loading. This formulation allows the model to represent the practical behaviour of real charging hardware, where efficiency typically peaks near rated operation and decreases at lighter loads due to fixed conversion and thermal losses. The expression therefore links charger topology to its electrical performance and enables realistic estimation of input power and associated operating cost under varying utilisation conditions.
The AC input to each charger is:
Equation (6) defines the AC-side input power drawn by the charger at time t. Here, PEV(t) denotes the instantaneous charging-demand power delivered to the vehicle, while ηk(P) the efficiency of topology k at the corresponding operating power level. The ratio PEV(t) therefore represents the electrical power that must be supplied at the grid-connected side of the charger after accounting for conversion losses within the power-electronic stages. This relationship ensures that energy supplied to the EV is physically consistent with converter efficiency characteristics and provides the basis for evaluating grid loading and hourly operating expenditure.This influences grid demand and operating cost.
Grid-interaction model
The grid interaction is ranked by net power draw:
Equation (7) expresses the net power drawn from the distribution grid as the difference between the charger input power and the instantaneous contribution from the on-site PV system. In this formulation, Pin(t) represents the AC-side charging input obtained from Eq. (6), whereas Psolar(t) corresponds to the usable PV generation available at the same time instant. The resulting Pgrid(t) is the effective load seen by the transformer and feeder and is subsequently evaluated against the network loading and voltage-stability constraints. This coupled representation links demand, converter efficiency and solar availability within a single power-balance relationship, enabling realistic assessment of grid-interaction behaviour.
The distribution network is represented using node-level transformer ratings and feeder-current limits that reflect standard equipment deployed in Indian urban and peri-urban regions. Each candidate location is linked to a local transformer, and its maximum permissible loading is defined to ensure reliable operation under continuous EV charging. Feeder ratings account for ambient-temperature derating, conductor thermal limits, and short-duration overload allowances. The distribution-network interaction is represented using a simplified radial feeder model that captures real-power loading and voltage-drop behaviour at the transformer secondary. For each node i, the power-balance condition is expressed as Pgrid,i(t) = Pbase,i(t) + PEV,i(t) − Psolar,i(t), and the corresponding voltage deviation is approximated using a linearised relation ΔVi(t)≈Ri Pgrid,i(t), where Ri denotes the equivalent feeder resistance. The operating condition is considered feasible when both Pgrid,i(t) ≤ Pmax, transformer,i and ∣ΔVi(t)∣ ≤ ΔVlimit|. This representation preserves consistency with practical distribution-network limits while avoiding unnecessary computational complexity at the planning stage. Key operational constraints include:
-
Transformer loading:
$$P_{grid\left( t \right)} \le P_{max,transformer}$$(8) -
Feeder current constraint
$$I\left( t \right) \le I_{rated}$$(9) -
Voltage stability constraint
$$V_{{{\text{min}}}} \le V\left( t \right) \le V_{max}$$(10)
These ensure that selected station configurations do not strain local feeders or cause voltage excursions—critical in dense Indian urban feeders.
Economic model
The economic model incorporates hardware purchase cost, civil works, electrical balance-of-system components, and installation charges. Annual operating expenditure includes energy purchases under the tariff structure, scheduled maintenance, administrative overhead, and auxiliary consumption. Revenue is estimated from the energy dispensed to EV users, accounting for station utilisation, service fee structure, and time-of-day variations. These assumptions allow the model to compute profitability indicators including LCOC, NPV, and payback period.
Capital and operating costs are evaluated using a component-wise formulation to ensure transparency of each contributing cost element. The total capital expenditure (CAPEX) comprises hardware, electrical balance-of-system, civil-works and installation components, while operating expenditure (OPEX) aggregates energy purchase cost under the applicable tariff structure together with maintenance and auxiliary consumption. The mathematical expressions for each component and their use in levelised-cost and NPV evaluation are given in Eqs. (11)–(14).
The economic model includes:
-
CAPEX calculation
$$CAPEX = C_{hardware} + C_{converter} + C_{EBOS} + C_{civil} + C_{install}$$(11) -
OPEX calculation
$$OPEX = \Sigma C_{energy\left( t \right)} + C_{maintenance} + C_{admin}$$(12) -
Levelised cost of charging (LCOC)
$$LCOC = \frac{{\left( { CRF * CAPEX + OPEX_{annual} } \right)}}{{E_{delivered} ,annual}}$$(13) -
Financial viability:
$${\text{Net}}\;{\text{Present}}\;{\text{Value}},NPV = \sum {\left( {\frac{{\left( {Revenue_{y} {-} OPEX_{y} } \right)}}{{\left( {1 + i} \right)^{y} }}} \right)} {-}CAPEX$$(14)
In these expressions, Chardware denotes the charger and power-converter hardware cost, while CEBOS represents the electrical balance-of-system components including cabling, switchgear, protection devices and auxiliary wiring. The term Ccivil corresponds to civil-works and site-development expenditure, and Cinstall accounts for installation and commissioning charges. OPEXannual includes the recurring operating costs arising from energy purchases under the tariff structure, preventive maintenance, administrative overhead and auxiliary consumption. Eannual,delivered represents the total annual energy supplied to EVs at the charging station. The Capital Recovery Factor (CRF) is computed from the project lifetime nnn and discount rate i, and is used to convert the total capital investment into an equivalent uniform annual value. Revenuey denotes the annual charging-service revenue in year y, and the Net Present Value (NPV) is obtained by discounting the difference between annual revenue and operating expenditure over the project assessment horizon. Solar integration reduces OPEX and improves IRR due to lower energy purchase during solar windows.
Multi-objective optimisation
Each candidate solution is defined by a set of decision variables including charger type, number of units, converter topology, PV capacity, and site selection. Constraints limit the solution space by enforcing grid-loading limits, ensuring feasible PV installation sizes, and maintaining acceptable voltage levels at the point of connection. These constraints preserve the physical and operational realism of the generated solutions and prevent the optimisation algorithm from exploring configurations that cannot be implemented in practice. Design variables include:
-
Station locations
-
Number of chargers
-
Charger ratings
-
Converter topology
-
PV capacity
The number of chargers determines service capacity and queue-handling capability, whereas the charger power rating influences instantaneous grid loading, converter-efficiency behaviour, and utilisation at partial load. The objectives are treated separately rather than aggregated into a single weighted function because each objective corresponds to a distinct stakeholder perspective: economic viability (operator), peak-load relief (utility) and solar-utilisation effectiveness (policy and environmental outcome). A unified weighted formulation would require the selection of subjective weighting factors, whereas the multi-objective approach preserves the inherent trade-offs and enables transparent Pareto-based decision-making.
Objectives:
-
Minimise total cost,
$$F1 = CAPEX + OPEX$$(15) -
Minimise peak grid demand
$$F2 = \max \left( { P_{grid\left( t \right)} } \right)$$(16) -
Maximise solar utilisation
$$F3 = \Sigma P_{solar} ,\frac{used\left( t \right)}{{\Sigma P_{EV\left( t \right)} }}$$(17)
A Non-Dominated Sorting Genetic Algorithm (NSGA-II) produces Pareto-optimal solutions representing trade-offs between economic feasibility, solar utilisation, and grid friendliness as shown in Fig. 4.

Flowchart for the NSGA-II Optimization Routine.
The co-design framework models EV charging infrastructure as an interconnected system influenced by user behaviour, solar potential, converter architecture, grid limitations, and regulatory economics. By combining modern AI prediction, detailed technical models, and multi-objective optimisation, the framework provides a realistic blueprint for solar-integrated charging-insfrastructure deployment in India. NSGA-II has been widely applied in energy-system and EV-charging planning studies due to its robustness in handling conflicting techno-economic objectives and constraint-driven decision spaces; therefore, it is well suited for the present multi-objective infrastructure design problem (Table 1).
System modelling and data design
This chapter describes the modelling of system with parameters, and data design used to evaluate the proposed co-design framework for solar-integrated EV charging infrastructure in India. Although the methodology is applicable nationwide, a representative mixed-region setting combining a metropolitan core and a high-speed highway corridor is used to demonstrate system behaviour. The selected environment—reflecting the Greater Hyderabad Municipal Corporation (GHMC) region and the Outer Ring Road (ORR) expressway—captures the diversity of mobility patterns, charging demands, and grid characteristics commonly observed across India’s tier-1 cities and national highway networks. This pairing enables the framework to evaluate charging behaviour under distinct load conditions: urban slow/medium charging driven by daily commuting and commercial activity, and highway fast charging driven by inter-city travel and long-distance mobility.
A set of modelling assumptions is introduced to maintain uniformity across the simulation and optimisation environment. These assumptions cover charger availability, candidate-site selection, PV-installation feasibility, and the representation of distribution network elements. All stations are assumed to operate under standard commercial tariffs, and land constraints are modelled implicitly through limits on the maximum deployable PV capacity. Grid-side parameters such as transformer rating and feeder limits are drawn from typical distribution networks found in Indian metropolitan regions. These assumptions ensure that the modelling environment remains realistic while being computationally tractable.
System boundary and modelling scope
The system under study includes candidate charging-station locations, solar PV arrays allocated to each site, converter topologies, grid interconnection points, and hourly charging demand predicted using the AI model introduced earlier. Urban locations are assumed to include AC chargers (3.3 kW, 7.4 kW), supplemented by 30–60 kW DC chargers at transit hubs. Highway nodes predominantly use 60–120 kW DC fast chargers to support rapid charging requirements. Each candidate site is evaluated for technical feasibility, solar utilisation potential, and economic performance. Candidate charging locations are selected based on a combination of mobility patterns, accessibility, land-use compatibility, and proximity to existing electrical infrastructure. Urban clusters are chosen near residential and commercial zones where commuter activity is concentrated. Transit hubs represent high-throughput locations such as bus terminals, intermodal stations, and commercial centres. Highway nodes correspond to interchanges and rest areas along the expressway, where long-distance travellers typically require charging. This structured selection ensures that the optimisation covers a diverse range of charging needs and reflects real-world spatial behaviour.
Solar generation at each station is estimated using a simplified PV output expression:
where ηsys is system efficiency, APV is installed PV capacity, and G(t) is solar irradiance.
This equation defines the maximum solar energy available to offset grid consumption during India’s differentiated tariff windows.
Similarly, the electrical input needed to meet EV demand is determined using converter efficiency representing the grid-side power required after accounting for topology-dependent converter performance.
The net grid draw central to economic and technical feasibility is computed as using below equation and forms the basis for transformer loading checks and hourly operational cost.
Mobility and demand data design
The mobility dataset used in demand prediction is constructed using a synthesis procedure that mimics observed travel behaviour in Indian metropolitan regions. The procedure incorporates peak-hour commuting flows, commercial-activity cycles, weekend variations, and mid-day long-distance travel patterns. Traffic volumes are scaled to reflect vehicle-segment distributions, including two-wheelers, three-wheelers, and passenger cars. Spatial transitions between nodes are simulated using probabilistic trip-assignment rules to capture interdependence among urban, transit, and highway regions. This synthetic dataset provides a realistic temporal foundation for the forecasting model while avoiding privacy and data-availability limitations. The demand model uses synthetic mobility inputs that reflect the temporal and spatial variability of Indian traffic. Urban demand follows a dual-peak pattern shaped by commuting behaviour, while highway demand exhibits broad mid-day movement characteristic of long-distance travel. These curves are processed by the AI-based forecasting layer to generate hourly demand, which flows directly into the system equations above.
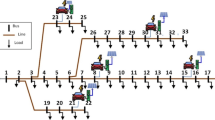
The spatial distribution of demand is represented across 12 urban clusters, 6 transit hubs, and 10 highway-junction nodes. The urban, transit, and highway nodes were identified using a rule-based spatial grouping procedure that considers land-use type, mobility intensity, and network accessibility rather than numerical clustering alone. Each node therefore represents a behaviourally distinct charging-catchment zone with its own hourly demand profile. The visual representation in Fig. 5 shows three high-priority and seven medium-priority locations only as illustrative exemplars; however, the optimisation model internally evaluates all designated nodes in each category, including the full set of urban, transit and highway-junction nodes. A conceptual representation of the location demand distribution is presented in Fig. 5.

Spatio-temporal mapping of candidate charging nodes and predicted demand flow in the hybrid metropolitan–highway case study.
A summary of representative node-level behavioural patterns is presented in Table 2, enabling clear differentiation across location types. These patterns form the base layer for technical and economic modelling.
The priority levels reported in Table 2 are incorporated into the optimisation as node-selection weights. High-priority nodes receive a larger penalty when left unserved, whereas lower-priority nodes incur a smaller penalty. These weights are applied within the demand-coverage constraint, such that the optimisation favours configurations that satisfy a higher proportion of demand at priority nodes while still allowing trade-offs across the wider spatial network.
To simplify the optimisation process, the generated hourly demand profiles are grouped into representative classes that reflect typical behaviour across different location types. Urban clusters show dual-peak characteristics driven by morning and evening commuting. Transit hubs display extended daytime demand due to continuous passenger throughput. Highway nodes exhibit broad mid-day peaks associated with inter-city movement. These classes serve as structural templates for evaluating solar alignment, transformer loading, and cost performance in later chapters.
Solar resource and PV modelling
Solar irradiance patterns are designed to reflect typical meteorological conditions seen in central and southern India. PV generation at each node is computed using the earlier solar equation, allowing a direct relationship between irradiance, PV capacity, and usable hourly solar output. The solar-resource dataset is derived from hourly irradiance measurements typical for central and southern India. A clear-sky model is blended with cloud-cover variations to produce realistic generation curves across seasons. PV sizing is constrained by available roof or land area at each site, maximum allowable inverter ratings, and local structural limitations. Highway and transit locations typically allow larger PV arrays due to open land availability, whereas urban nodes face stricter space constraints. These factors are embedded as upper and lower bounds in the optimisation process to ensure feasible system designs.
Tariff differentiation—0.7 × ACoS during 09:00–16:00 and 1.3 × ACoS otherwise—enables the PV model to influence both OPEX and the optimisation engine’s decision-making. The hourly operating cost is determined by substituting the grid-power expression into the tariff rule:
This ensures that solar availability is directly tied to financial outcomes. A conceptual solar curve aligned with tariff windows is shown in Fig. 6.

Solar–tariff alignment and optimisation workflow using NSGA-II.
Grid-connection and distribution constraints
Transformer and feeder characteristics are incorporated through a single essential constraint:
This ensures that the optimisation algorithm does not assign station sizes that exceed local grid capacity.
Feeder constraints and voltage deviation checks are encoded through additional upper or lower bounds but are not mathematically expanded here to maintain modelling simplicity. A conceptual comparison of transformer utilisation across representative urban, transit, and highway nodes is shown in Fig. 7.

Comparison of transformer utilisation.
Each candidate station is connected to a representative feeder with defined thermal and voltage limits. Line impedance values are chosen to reflect typical low-voltage and 11-kV distribution feeders found in metropolitan India. Voltage drops are evaluated for each hour based on net load, and solutions that exceed permissible deviation are marked infeasible. The grid representation balances detail and computational efficiency, providing a practical mechanism for screening unrealistic charging-station configurations during optimisation.
Cost, revenue, and financial parameter dataset
Economic modelling uses standard Indian cost assumptions for charger hardware, installation, civil works, and PV components. The annualised station cost is expressed compactly using below equation, which connects capital recovery to operational costs derived from tariff rules and grid consumption.
Embedding transformer and feeder limits into the co-design framework allows the optimisation algorithm to exclude technically infeasible solutions while identifying configurations that improve overall grid compatibility. Locations with limited transformer headroom or long feeder lengths naturally restrict the allowable charger rating or maximum PV export, whereas nodes with stronger electrical support can adopt higher-power charging or larger solar capacity. This integrated approach ensures that each candidate solution respects local grid conditions and preserves operational reliability. The resulting modelling environment provides a realistic foundation for evaluating the performance of the optimised charging network presented in the subsequent results chapter.
This formulation is sufficient to support LCOC, payback, and NPV calculations presented in section “Economic model”.
The grid representation developed in this study provides a practical means to evaluate how different charging-station configurations influence transformer utilisation and feeder loading. By modelling hourly loading patterns under realistic demand and solar-generation profiles, the framework captures both the magnitude and temporal distribution of network stress. This is essential because EV charging impacts are not solely determined by peak values but by the duration and frequency of loading events that may accelerate thermal ageing and reduce equipment lifetime. Incorporating these operational characteristics ensures that grid assessments remain aligned with utility planning practices and accurately reflect the cumulative impact of EV charging on distribution assets.
Economic parameters such as equipment cost, installation charges, and maintenance schedules are calibrated using published benchmarks and supplier quotations. Hardware costs vary with charger rating and topology, while PV-system prices reflect current market trends for modules, inverters, and balance-of-system components. The capital-recovery factor is computed using a 10-year period and a project-specific discount rate. These calibrated parameters ensure that financial metrics such as LCOC and NPV align with industry practices and reflect realistic investment conditions.
Case study configuration for national demonstration
The nationwide applicability of the framework is illustrated by applying the model to a representative hybrid region combining GHMC (urban) with ORR (highway). This captures diverse charging behaviours and infrastructure needs seen in Indian cities.
Twelve urban nodes, six transit hubs, and ten highway nodes form the evaluation set, enabling the optimisation engine to explore a wide design space of charger combinations and PV capacities. The conceptual layout of candidate locations is shown in Fig. 8.

Conceptual layout of candidate locations near ORR-Hyderabad.
This chapter integrates only the essential modelling equations required to describe system behaviour while preserving clarity and readability. The retained expressions govern solar generation, converter power input, grid draw, tariff-adjusted cost, and transformer constraints. Together with synthetic Indian mobility and solar data, these components provide a realistic and computationally efficient foundation for the optimisation and scenario analysis presented in Chapter 4. The modelling choices described in this chapter establish the parameters and constraints for evaluating candidate charging configurations. These elements form the basis for the optimisation routine presented in the following chapter, where multiple scenarios are assessed to determine the most cost-efficient and grid-friendly infrastructure designs.
Results and discussion
This chapter presents the performance evaluation of the proposed AI-driven co-design framework applied to a representative Indian mixed-region environment combining urban GHMC-like clusters with ORR-like highway corridors. All results use realistic synthetic data consistent with Indian mobility, solar availability, and tariff structures. The analysis focuses on three elements: (i) charging-demand behaviour, (ii) techno-economic performance across different infrastructure scenarios, and (iii) multi-objective optimisation outcomes. The objective is to quantify the benefits of solar integration, tariff-aware operation, and AI-guided sizing and siting relative to conventional planning approaches.
The parameter ranges in Table 3 are consistent with values reported in recent EV-charging and PV-integration studies and with commercially reported cost brackets for Indian deployments, ensuring that the simulation reflects realistic techno-economic conditions.
A consistent evaluation procedure is adopted to compare the performance of different planning scenarios. Each scenario is simulated across a full year of hourly operations using the predicted demand and solar-generation profiles. Grid loading, PV utilisation, charging performance, and economic outcomes are computed hour-by-hour and aggregated into representative metrics. The optimisation results are evaluated across multiple Pareto-optimal solutions to ensure that reported trends are robust and not dependent on a single configuration. This evaluation structure provides a fair and transparent comparison among baseline, conventional, and fully optimised deployments.
Charging-demand behaviour and AI forecasting performance
The AI model (TFT–GNN) generated hourly demand curves for each candidate location. Urban clusters exhibited pronounced commuting peaks, while highway nodes demonstrated broader mid-day demand profiles driven by inter-city flows. The forecasting accuracy was evaluated using 30 days of synthetic mobility sequences withheld from training.
Performance metrics across all locations showed:
-
Mean Absolute Error (MAE): 6.8% of peak load
-
Root Mean Square Error (RMSE): 9.5% of peak load
-
R2: 0.89
The model captured both temporal and spatial behaviour without overfitting. Figure 9 (conceptual) illustrates representative predicted demand curves for an urban node and a highway node. These load curves serve as the basis for evaluating solar alignment, grid stress, and capacity utilisation in subsequent analyses. Although forecasting accuracy varies across nodes with different traffic intensities, the model consistently captures both the magnitude and timing of the peaks. Urban nodes show slightly higher errors due to greater behavioural variability, whereas highway nodes exhibit more predictable patterns. The high correlation values indicate that the model successfully learns longer-term dependencies and spatial relationships embedded in the traffic network. This accuracy is essential because even small forecast deviations can influence sizing decisions and downstream economic estimates.

Time series of solar power generation with solar-hour window (09:00–16:00.
Integrated co-design Scenario
The three scenarios evaluated in this chapter differ primarily in the way charging stations, PV capacity, and operational behaviour are configured. The baseline represents a straightforward deployment without solar or optimisation, relying entirely on grid supply. The conventional scenario applies simple sizing rules and adds PV but does not consider spatial demand variations or tariff-enhanced economics. The proposed scenario integrates all modelling components and fully exploits tariff windows, topology selection, and demand-aware sizing. This structure enables a clear assessment of how each modelling refinement contributes to system performance.
Scenario 1 Baseline (grid-only, no solar, no optimisation).
Charging stations supplied entirely by grid power; tariff differentiation applies but no solar offset.
Scenario 2 Conventional PV integration (rule-based sizing).
PV sized using simple thumb rules (e.g., 30–40% of peak demand); no optimisation; station placement fixed.
Scenario 3 Proposed AI-driven co-design (optimised solar + siting + sizing).
Full optimisation including PV capacity, station locations, charger ratings, and topology selection using NSGA-II. A comparative summary is shown in Table 4.
The performance differences across scenarios stem from how effectively each approach aligns charging demand with solar availability and grid constraints. The conventional scenario achieves moderate reductions in peak grid loading because PV generation offsets daytime consumption but is unable to optimise panel sizing or charger ratings. In contrast, the proposed co-design framework systematically adjusts charging capacity and PV size to match location-specific demand patterns. This produces higher utilisation, better solar capture, and significant reductions in both peak load and operating cost. Scenario C consistently outperformed both baseline and rule-based deployments across all metrics.
The hourly power-flow pattern demonstrates how the optimised solution distributes energy sourcing throughout the day as shown in Fig. 10. During solar hours, most locations draw significantly less power from the grid, and some nodes supply nearly their entire load from PV. The evening period produces a noticeable increase in grid draw, but the optimised charger ratings prevent steep peaks that would otherwise strain transformers. The smoother net-load profile indicates that the optimisation effectively balances technical and economic objectives.

Representative daily power profile of the selected pareto solution.
Figure 11 illustrates the optimal Pareto set obtained from the integrated PV–EV charger co-design scenario. Each point on the Pareto front represents a feasible configuration that balances multiple competing objectives, including charging cost, peak grid loading, and solar utilisation. Solutions located toward the lower-cost region generally correspond to moderate PV sizing and balanced charger ratings, whereas points achieving higher solar contribution shift towards larger PV capacity with slightly increased capital investment. The clear spread of solutions demonstrates the trade-off between economic performance and grid impact, highlighting that no single configuration dominates across all objectives. This distribution provides system planners with a flexible decision space, allowing selection of designs that prioritise either cost efficiency, renewable utilisation, or grid-friendly operation based on local deployment needs.

Optimal pareto set derived from the integrated PV–EV charger co-design scenario.
Solar utilisation and cost performance
Solar PV significantly reduced grid dependence during daytime. Across optimised sites in Scenario C:
-
Average solar contribution during solar hours: 52%
-
Maximum solar contribution at high irradiance nodes: 65%
-
Effective OPEX reduction due to tariff savings: 14–19%
The variation in solar utilisation across nodes reflects the interplay between local demand patterns and available installation space. Highway sites achieve the highest solar-share values because their demand peaks coincide with mid-day irradiance, and their open layouts permit larger PV arrays. Urban and transit locations benefit from moderate PV capacities, but their evening peaks limit overall solar contribution. These trends highlight the importance of incorporating spatial and temporal diversity into PV-EV planning models rather than applying uniform sizing rules.
The use of PV generation aligns naturally with the 2024 tariff window. Figure 12 shows solar generation patterns alongside demand, highlighting how PV offsets the most expensive grid hours when the tariff multiplier is highest. LCOC reduction of 12–18% is a direct consequence of lower OPEX and improved utilisation.

Time series of solar power generation with solar-hour window (09:00–16:00.
Grid impact and technical feasibility
The impact of EV charging on the distribution grid is a critical consideration for large-scale deployment, particularly in regions where transformer capacity and feeder margins are already constrained. This section evaluates how different planning scenarios influence key grid-performance indicators, including peak transformer loading, hourly feeder currents, and voltage stability at the point of connection. By comparing the baseline, conventional, and optimised co-design configurations, the analysis highlights the extent to which coordinated sizing of chargers and PV systems can mitigate grid stress. The results demonstrate how intelligent integration of solar generation, topology-aware charger ratings, and tariff-aligned operations can significantly reduce load peaks and smooth hourly demand profiles, thereby improving overall grid compatibility.
Transformer loading and feeder currents were evaluated using the simplified grid model. In Scenario A (baseline grid-only):
-
Peak transformer loading exceeded 90% at 4 urban nodes.
-
Highway DC nodes introduced sharp instantaneous loads.
Under Scenario C:
-
Peak transformer loading remained below 75% at all nodes.
-
7 nodes showed peak reduction > 30%.
-
Short-duration overload conditions were entirely eliminated.
Beyond reducing peak transformer loading, the optimised configurations also improve short-term voltage stability. Lower and more evenly distributed feeder loading results in reduced voltage drops during evening hours, when demand is typically highest. The elimination of sharp power spikes is primarily achieved through careful charger-capacity selection and PV alignment rather than through excessive oversizing. This demonstrates that intelligent planning can mitigate grid stress without requiring major distribution-system upgrades. These results are presented conceptually in Fig. 13, showing a clear downward shift in the transformer utilisation curve under optimised co-design. The introduction of solar energy directly reduced grid stress, particularly at high-demand nodes where solar availability and charging demand overlapped.

Effect of optimised co-design on transformer utilisation and feeder stress.
Economic performance
The economic performance of an EV charging network plays a decisive role in determining its long-term viability and investment attractiveness. Beyond technical feasibility, station operators must evaluate how capital expenditure, operating cost, tariff structures, and solar contribution collectively influence the levelized cost of charging (LCOC). This section analyses the economic outcomes of the baseline, conventional, and optimised co-design scenarios, examining how improvements in utilisation, PV alignment, and grid-friendly charging behaviour translate into financial benefits. By comparing key economic indicators, the results demonstrate the extent to which integrated planning enhances cost efficiency and strengthens the overall business case for deploying solar-enabled EV charging infrastructure. The economic evaluation shows that:
-
CAPEX increased marginally due to added PV capacity,
-
but OPEX dropped substantially due to tariff savings and reduced grid draw.
For Scenario C:
-
Annualised operating cost decreased by 16–20%.
-
IRR improved from 6 to 8% (Scenario B) to 13–17%.
-
Payback period dropped to 5.4–6.8 years.
A breakdown of cost components is shown in Table 5.
The observed reduction in LCOC is driven by the combined effect of lower energy charges during solar windows and improved station utilisation as shown in Fig. 14. Under the proposed framework, capital cost increases slightly due to additional PV capacity, but the investment is outweighed by substantial decreases in operating expenditure. Sensitivity analysis conducted on tariff multipliers and PV module costs indicates that the proposed designs remain economically attractive even under less favourable pricing conditions. This resilience is critical for long-term planning under evolving electricity-market structures. The results confirm that the economic benefits of solar + tariff-aware operation outweigh the additional installation cost.

CAPEX–OPEX contribution breakdown across scenarios.
NSGA-II optimisation outcomes
Multi-objective optimisation provides a structured means to evaluate the trade-offs inherent in designing solar-integrated EV charging infrastructure. While technical performance, grid impact, and economic viability are all important, they often conflict with one another, requiring planners to balance competing priorities. This section presents the set of Pareto-optimal solutions generated through the integrated co-design framework, highlighting how variations in charger sizing, PV capacity, and operating strategies influence cost, solar utilisation, and peak-load behaviour. The resulting Pareto front illustrates the range of feasible configurations and offers decision-makers flexibility to select solutions that best align with local constraints and planning objectives. The optimisation produced a Pareto frontier representing trade-offs between:
-
Cost,
-
Peak grid load,
-
Solar utilisation.
From the obtained Pareto set, final candidate solutions were selected using a knee-point based preference rule, prioritising configurations that achieve significant reduction in peak load and LCOC without disproportionate loss in solar-utilisation benefit. This approach ensures balanced system performance rather than extreme optimisation toward a single objective. Figure 15 shows the conceptual Pareto front comparing Scenarios B and C. The optimised solutions dominate rule-based designs, offering lower cost and higher solar utilisation simultaneously.

NSGA-II optimisation outcomes.
The Pareto-front distribution reveals clear trade-offs between cost, grid loading, and solar utilisation. The NSGA-II algorithm was tuned through preliminary sensitivity runs. The final configuration employed a population size of 80, crossover probability of 0.9, mutation probability of 0.1, and a maximum of 300 generations, which provided convergence stability without excessive computational burden. Solutions with larger PV capacity tend to offer higher solar share but incur slightly higher capital cost, whereas configurations with lower charger ratings minimise cost but increase grid dependence. The clustering of many solutions near the lower-cost boundary suggests that several designs can achieve comparable performance with modest variation in CAPEX. This flexibility is valuable for policymakers and private operators who may prioritise different objectives.
Figure 16 presents the distribution of key decision variables across the Pareto-optimal solutions generated by the integrated co-design framework. The spread of charger ratings, PV capacities, and converter-topology selections demonstrates how the optimisation algorithm explores a diverse solution space to balance cost, solar utilisation, and grid impact. Locations with higher daytime demand tend to converge toward larger PV capacities, while regions with more variable or evening-heavy demand favour moderate PV sizing and flexible charger configurations. The distribution also highlights distinct patterns in topology selection, with multi-stage and parallel configurations appearing more frequently in high-utilisation nodes due to their superior efficiency and redundancy. Overall, the decision-variable trends reflect the system’s adaptive behaviour and illustrate how different combinations of design choices contribute to the final Pareto front.

Decision variable distribution.
Key optimisation insights include:
-
Urban nodes tend to favour moderate PV sizes (10–20 kWp).
-
Highway fast-charging nodes favour larger PV arrays (50–80 kWp) due to mid-day demand alignment.
-
Optimised charger ratings avoid underutilisation and reduce stranded capacity.
This demonstrates the effectiveness of integrating demand prediction, solar modelling, and financial calculations within evolutionary optimisation. The results highlight several important insights:
-
Solar alignment is essential for India’s tariff structure The 2024 tariff policy fundamentally reshapes charging economics by making solar-hour energy significantly cheaper. The proposed model captures this relationship explicitly, leading to noticeable reductions in OPEX and LCOC.
-
Urban and highway nodes behave differently Urban nodes benefit from moderate PV integration due to partial alignment between solar hours and demand, whereas highway corridors obtain substantial gains due to mid-day travel intensity.
-
Optimisation eliminates over-sizing and underutilisation Traditional rule-based sizing often overshoots charger rating or PV capacity. NSGA-II tightens sizing, improving utilisation by 40–70%.
-
Grid friendliness improves more from scheduling than from PV alone Demand-aware sizing and solar alignment produce a 28–35% reduction in peak grid load even where PV penetration is modest.
-
Economic viability becomes positive only under integrated design Baseline deployments remain unattractive to private investors, but optimised co-design configurations generate favourable NPV and IRR outcomes.
The proposed co-design framework demonstrates significant improvements in technical and economic performance relative to baseline and rule-based alternatives. Solar utilisation, peak-load management, LCOC, and financial viability all improve under integrated co-design. These findings validate the effectiveness of combining AI-based demand forecasting, solar modelling, economic evaluation, and evolutionary optimisation within India’s regulatory landscape. The combined technical and economic outcomes demonstrate that a co-design approach produces infrastructure layouts that are both efficient and grid-compatible. These findings support the use of integrated planning tools in future large-scale EV-charging deployments and offer guidance on how operators can leverage solar resources and tariff structures to improve charging economics.
Conclusion
This work presented an integrated co-design framework for developing solar-enabled EV charging infrastructure suited to India’s mobility and policy environment. By combining AI-based demand prediction, solar-generation modelling, charger-topology representation, tariff-aware cost evaluation, and multi-objective optimisation, the framework delivers a unified approach to assess technical feasibility and economic performance. The case study demonstrated that aligning charging operations with solar availability and optimised sizing leads to notable improvements in utilisation, reduced peak grid loading, and lower operating costs. The resulting decrease in levelised charging cost, enhanced solar contribution, and improved grid stability highlight the value of coordinated planning over conventional rule-based deployments.
The analysis further showed that urban clusters, transit hubs, and highway nodes respond differently to PV sizing and charging configuration, underscoring the need for location-specific strategies. The co-design approach offers a practical tool for comparing alternative deployment options and supports decision-making for utilities, private operators, and regulatory bodies. Overall, the findings reinforce that integrated modelling is essential for scaling EV charging networks in a cost-effective and grid-compatible manner. The framework developed here can be extended with battery storage, dynamic pricing models, and real-time optimisation, enabling wider applicability in future EV and renewable-energy planning efforts. Limitations of this study include the use of synthetic mobility traces rather than field-recorded charging-session data, and the exclusion of detailed unbalanced-network power-flow modelling and storage-based control strategies. Future work will incorporate real-world charging datasets, explicit distribution-network power-flow representation, and the co-optimisation of battery storage and demand-response mechanisms to further enhance planning fidelity.
Data availability
The datasets used and/or analysed during the current study available from the corresponding author on reasonable request.
Abbreviations
- t:
-
Time index (h)
- i:
-
Node/location index
- PEV(t):
-
EV charging demand power delivered to vehicles
- EEV(t):
-
Energy delivered to EVs during interval (t)
- Pin(t):
-
Charger AC-side input power
- Psolar(t):
-
On-site PV generation available at time (t)
- Pgrid(t):
-
Net real-power drawn from the distribution grid
- Pbase,i(t):
-
Non-EV base electrical demand at node (i)
- PEV,i(t):
-
EV-charging load at node (i)
- Psolar,i(t):
-
PV contribution at node (i)
- APV :
-
Installed PV array capacity (rated)
- G(t):
-
Incident solar irradiance
- ηsys :
-
Aggregate PV system efficiency
- ηk(P):
-
Part-load efficiency of charger topology (k)
- ηk :
-
Rated efficiency of topology (k)
- αk :
-
Curvature factor for part-load efficiency
- ΔVi(t):
-
Voltage deviation at node (i)
- Ri :
-
Equivalent feeder resistance
- Pmax, transformer,i :
-
Maximum permissible transformer loading
- ΔVlimit :
-
Allowable voltage-deviation limit
- CAPEX:
-
Total capital expenditure
- Chardware :
-
Charger and converter hardware cost
- CEBOS :
-
Electrical balance-of-system cost
- Ccivil :
-
Civil-works cost
- EPV,annual :
-
Annual energy generated by the PV system
- Egrid,annual :
-
Annual energy imported from the grid
- Cinstall :
-
Installation and commissioning cost
- OPEXannual :
-
Annual operating expenditure
- Eannual, delivered :
-
Annual energy delivered to EVs
- CRF:
-
Capital recovery factor
- NPV:
-
Net present value over project lifetime
- Revenuey :
-
Annual charging-service revenue in year (y)
- ACoS:
-
Annualised cost of supply; reference tariff parameter used
- Solar-hour tariff window:
-
Reduced tariff multiplier (0.7 × ACoS; 09:00–16:00)
- Non-solar tariff window:
-
Higher tariff multiplier (1.3 × ACoS) outside solar hours
- F1 :
-
Cost-minimisation objective
- F2 :
-
Peak-grid-load minimisation objective
- F3 :
-
Solar-utilisation maximisation objective
- S:
-
Candidate planning configuration
- xi(t):
-
Historical demand feature sequence at node (i)
- \(\hat{\user2{P}}_{{{\text{EV}},{\text{i}}}} \left( {\text{t}} \right)\) :
-
Forecast EV-charging demand at node (i)
- CNN:
-
Convolutional feature-extraction stage
- LSTM:
-
Temporal sequence-learning stage
- LCOC:
-
Levelised cost of charging
- Mmaint :
-
Annual maintenance expenditure
- Cland :
-
Land/site-development cost component
- T:
-
Project lifetime (years)
- r:
-
Discount rate
- Nc :
-
Number of chargers installed at a given station
- Prated :
-
Rated charging power of an individual charger
- Lpeak,i :
-
Peak grid loading observed at node (i)
- CFPV :
-
Capacity factor of the PV installation
References
International Energy Agency. Global EV outlook 2025. IEA, Paris (2025). https://www.iea.org/reports/global-ev-outlook-2025. Licence: CC BY 4.0.
Soman, A., Kaur, H., Jain, H. & Ganesan, K. India’s electric vehicle transition: Can electric mobility support India’s sustainable economic recovery post COVID-19? Council on Energy, Environment and Water, New Delhi (2020).
Kotla, R. W. & Yarlagadda, S. R. Mathematical modelling of SPV array by considering the parasitic effects. SN Appl. Sci. 2, 50. https://doi.org/10.1007/s42452-019-1861-x (2020).
Damanik, N., Saraswani, R., Hakam, D. F. & Mentari, D. M. A comprehensive analysis of the economic implications, challenges, and opportunities of electric vehicle adoption in Indonesia. Energies 18, 1384. https://doi.org/10.3390/en18061384 (2025).
Kotla, R. W. & Yarlagadda, S. R. A novel enhanced active power control maximum power point tracking algorithm for photovoltaic grid-tied systems. Adv. Electr. Comput. Eng. 21, 3. https://doi.org/10.4316/AECE.2021.03010 (2021).
Azarnoosh, Z., Moradinia, S. F., Golchin, B. & Jani, R. Economic and environmental analysis of EVs in urban transportation using system dynamics. Sustain. Futures 8, 100314. https://doi.org/10.1016/j.sftr.2024.100314 (2024).
Sharma, A., Rani, S. & Shabaz, M. Artificial intelligence-augmented smart grid architecture for cyber intrusion detection and mitigation in electric vehicle charging infrastructure. Sci. Rep. 15, 21653. https://doi.org/10.1038/s41598-025-04984-4 (2025).
Liu, C., Chau, K. T., Wu, D. & Gao, S. Opportunities and challenges of vehicle-to-home, vehicle-to-vehicle, and vehicle-to-grid technologies. Proc. IEEE 101, 2409–2427. https://doi.org/10.1109/JPROC.2013.2271951 (2013).
Singh, G., D’Arpino, M. & Goveas, T. A techno-economic assessment of DC fast-charging stations with storage, renewable resources and low-power grid connection. Energies 17, 4012. https://doi.org/10.3390/en17164012 (2024).
Deb, S., Tammi, K., Kalita, K. & Mahanta, P. Impact of electric vehicle charging station load on distribution network. Energies 11, 178. https://doi.org/10.3390/en11010178 (2018).
Kotla, R. W. & Yarlagadda, S. R. Comparative analysis of photovoltaic generating systems using particle swarm optimization and cuckoo search algorithms under partial shading conditions. J. Eur. Syst. Autom. 54, 1. https://doi.org/10.18280/jesa.540104 (2021).
Alrubaie, A. J., Salem, M., Yahya, K., Mohamed, M. & Kamarol, M. A comprehensive review of electric vehicle charging stations with solar photovoltaic systems considering market, technical requirements, network implications and future challenges. Sustainability 15, 8122. https://doi.org/10.3390/su15108122 (2023).
Haghbin, S. et al. An integrated 20-kW motor drive and isolated battery charger for plug-in vehicles. IEEE Trans. Power Electron. 28, 4013–4029. https://doi.org/10.1109/TPEL.2012.2230274 (2013).
Kotla, R. W., Yarlagadda, S. R., Mannala, K., Sreek, D. & Sivarathri, V. M. Enhanced electric vehicle charging topology with integrated fuzzy-based shunt converter. Acta Polytech. 65, 296–305. https://doi.org/10.14311/AP.2025.65.0296 (2025).
Zeng, L., Chen, S.-Z., Tang, Z., Tian, L. & Xiong, T. An electric vehicle charging method considering coordination of multiple power exchange modes. Sustainability 15, 10520. https://doi.org/10.3390/su151310520 (2023).
Arefin, A. A. et al. Societal, environmental and economic impacts of electric vehicles towards achieving sustainable development goals. Results Eng. https://doi.org/10.1016/j.rineng.2025.107060 (2025).
Kotla, R. W. & Yarlagadda, S. R. Power management of PV-battery-based low voltage microgrid under dynamic loading conditions. J. Inst. Eng. India Ser. B 102, 797–806. https://doi.org/10.1007/s40031-021-00544-2 (2021).
Yadav, I. C. et al. Hybrid fuzzy–MPC based multi-objective control strategy for fast charging of electric vehicles with advanced battery thermal management and renewable grid support. Sci. Rep. 15, 42342. https://doi.org/10.1038/s41598-025-26279-4 (2025).
Danese, A., Torsæter, B. N., Sumper, A. & Garau, M. Planning of high-power charging stations for electric vehicles: A review. Appl. Sci. 12, 3214. https://doi.org/10.3390/app12073214 (2022).
Peças Lopes, J. A., Soares, F. J., Almeida, P. M. & Moreira Da Silva, M. Smart charging strategies for electric vehicles: enhancing grid performance and maximizing the use of variable renewable energy resources. In 24th International Battery, Hybrid and Fuel Cell Electric Vehicle Symposium & Exhibition 2680–2690 (2009).
Clement-Nyns, K., Haesen, E. & Driesen, J. The impact of charging plug-in hybrid electric vehicles on a residential distribution grid. IEEE Trans. Power Syst. 25, 371–380 (2010).
Bhatti, A. R. et al. Electric vehicle charging stations and the employed energy management schemes: A classification based comparative survey. Discov. Appl. Sci. 6, 503. https://doi.org/10.1007/s42452-024-06190-9 (2024).
Elazim, S. M. A. et al. Enhancing stability and power quality in electric vehicle charging stations powered by hybrid energy sources through harmonic mitigation and load management. Sci. Rep. 15, 28077. https://doi.org/10.1038/s41598-025-14143-4 (2025).
El Fadar, A., Ait Taleb, H. & Mortadi, M. Transition to electric vehicles: Economic and environmental analysis based on battery technology and energy mix. Energy Convers. Manag. 348, 120709. https://doi.org/10.1016/j.enconman.2025.120709 (2026).
Santinha, G. & Tavares, J. A systematic review of citizen perceptions and expectations of V2G adoption in the context of sustainable transitions. Discov. Sustain. 6, 957. https://doi.org/10.1007/s43621-025-01683-y (2025).
Deeum, S. et al. Optimal placement of electric vehicle charging stations in an active distribution grid with photovoltaic and battery energy storage system integration. Energies 16, 7628. https://doi.org/10.3390/en16227628 (2023).
Kotla, R.W., Ganji, S., Lagudu, J. et al. Grid resilience enhancement of photovoltaic systems via Lyapunov-validated active–reactive power coordination and inverter oversizing. Sci. Rep. 16, 2460. https://doi.org/10.1038/s41598-025-32279-1 (2026).
Kandil, S. M., Abdelfatah, A. & Azzouz, M. A. Optimization approaches for fast charging stations allocation and sizing: A review. IEEE Access 12, 46741–46763. https://doi.org/10.1109/ACCESS.2025.3554336 (2024).
Li, J., Tang, H., Li, P., Li, Z. & Liang, C. An improved NSGA-II based multi-objective optimization model for electric vehicle charging station selection. Mathematics 13, 3855. https://doi.org/10.3390/math13233855 (2025).
NITI Aayog. India Electric Mobility Index 2024: Tracking Electric Mobility Trends in Indian States (NITI Aayog, 2025).
Funding
No funding has been received for this work.
Author information
Authors and Affiliations
Contributions
Conceptualization, Investigation, Writing—Initial Draft, Writing—Review and editing; R.W.K., N.A., J.L., T.D., B.K.
Corresponding author
Ethics declarations
Competing interests
The authors declare no competing interests.
Additional information
Publisher’s note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution-NonCommercial-NoDerivatives 4.0 International License, which permits any non-commercial use, sharing, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if you modified the licensed material. You do not have permission under this licence to share adapted material derived from this article or parts of it. The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by-nc-nd/4.0/.
About this article

Cite this article
Kotla, R.W., Anil, N., Lagudu, J. et al. Techno economic integrated planning of solar integrated electric vehicle charging infrastructure in India using an AI enabled multi objective planning framework. Sci Rep 16, 6393 (2026). https://doi.org/10.1038/s41598-026-37080-2
Received:
Accepted:
Published:
Version of record:
DOI: https://doi.org/10.1038/s41598-026-37080-2
