
Abstract
This paper describes a Bayesian hierarchical approach to predict short-term concentrations of particle pollution in an urban environment, with application to inhalable particulate matter (PM10) in Greater London. We developed and compared several spatiotemporal models that differently accounted for factors affecting the spatiotemporal properties of particle concentrations. We considered two main source contributions to ambient measurements: (i) the long-range transport of the secondary fraction of particles, which temporal variability was described by a latent variable derived from rural concentrations; and (ii) the local primary component of particles (traffic- and non-traffic-related) captured by the output of the dispersion model ADMS-Urban, which site-specific effect was described by a Bayesian kriging. We also assessed the effect of spatiotemporal covariates, including type of site, daily temperature to describe the seasonal changes in chemical processes affecting local PM10 concentrations that are not considered in local-scale dispersion models and day of the week to account for time-varying emission rates not available in emissions inventories. The evaluation of the predictive ability of the models, obtained via a cross-validation approach, revealed that concentration estimates in urban areas benefit from combining the city-scale particle component and the long-range transport component with covariates that account for the residual spatiotemporal variation in the pollution process.
Similar content being viewed by others


INTRODUCTION
Concern over short- and long-term effects of outdoor air pollution on health has led to great efforts to study appropriate exposure assessment methods aimed at quantifying health risks.
Geographic information system (GIS)-based methods like land-use regression models1, 2 have been successfully applied to estimate long-term (e.g. annual) ambient concentrations,3 but these techniques are not appropriate for short-term modelling as they do not include the influence of both changing source emissions or meteorology.
To provide accurate estimates of short-term air pollution concentrations to use in health effect studies, researchers are increasingly turning to statistical or deterministic dispersion models. The former approach typically considers series of data collected at monitoring sites and characterises these with spatial or spatiotemporal structures; in this context, the Bayesian paradigm has experienced a substantial increase in usage in the past decade.4, 5, 6, 7, 8, 9, 10 The latter approach simulates the dispersion of air pollution concentrations through deterministic models based on mathematical description of physical–chemical processes taking place in the atmosphere. Because the measurements at ambient monitoring stations can be sparse and irregularly spaced, as well as affected by missing data, the use of deterministic dispersion models has become increasingly popular owing to their more comprehensive coverage over space and time. However, deterministic models are affected by different sources of uncertainty when compared with measurements, because the output depends not only on accurately characterising source emissions, meteorology and geographical features of the dispersion environment but also on the model configuration options selected by the user (for instance, several numerical models present options to apply diurnal, weekly and monthly profiles to the emission sources).
With respect to the issue of numerical uncertainty in deterministic models, a critical role is played by the ambient measurements as they are frequently used to develop, evaluate and calibrate the air quality models. The process of calibration is somewhat contentious but it is widely accepted that the use of measurements can lead to improved model performance where some inputs are not fully parameterised.11
Recently, approaches to tackle this problem have been focussed on the combination of deterministic model output with observed monitoring data.12, 13, 14, 15, 16, 17, 18 We follow these current approaches, but differently from the main literature on this topic that is best suited for combining data collected at different spatial resolutions (observed concentrations collected at point level and output from deterministic models at grid level), we suggest a methodology for exposure assessment operating exclusively at point level scale. In particular, we provide an approach, under the Bayesian framework, to obtain enhanced predictions of particle pollution (PM) for use in short-term health effect studies.
In the context of exposure assessment, the successful modelling of PM at a local or city scale is a frequent technical challenge that requires information about regional background pollutant concentrations. This reflects the complexity of ambient PM that comprises of primary particulates arising from local traffic and non-traffic emissions, and secondary particles formed by atmospheric physical and chemical processes, such as condensation of vaporised material or by-product of the oxidation of gases, mainly during the course of long-range transport of pollutants.
In this paper, we worked with point-referenced time series (daily) and considered several hierarchical models that differently accounted for the relative contribution of regional and local sources affecting the spatiotemporal properties of PM. Specifically, we considered:
-
1)
A time-varying latent regional process for capturing the long-range transport of PM. In our study, regional PM concentrations were estimated through direct measurement of rural background concentrations, using an additive approach as suggested by Lenschow et al.19
-
2)
A spatial local process for capturing the additional urban and local primary PM component. In our application, a local-scale air pollution dispersion model was used to describe this component.
Moreover, we accounted for selected space- or time-varying factors, which could have a direct influence on the pollution process or could be used as proxies for other unmeasured variables.
We applied our proposed methodology to model inhalable PM in Greater London (UK), namely particles with a diameter ≤10 μm (PM10), one of the air pollutants of most concern for public health that has been linked to a range of serious cardiovascular and respiratory health effects.20, 21, 22
We assessed the predictive performance of the models using a cross-validation approach.
Finally, we compared our approach with the one typically used in the literature on spatiotemporal modelling of air pollution, including random intercepts to account for spatial and temporal dependencies.
MATERIALS AND METHODS
Data Description
The PM10 data (μg/m3) were daily average concentrations (midnight to midnight) collected in the years 2002–2003 (728 days). This period was selected to include several pollution episodes (i.e. periods of elevated PM10) and the 2003 European heat wave.23 The data were log-transformed to achieve a Gaussian distribution. They came from three sources:
(1) Mass concentration measurements from the London Air Quality Network (LAQN; www.londonair.org.uk): This monitoring network had 76 PM10 sites in 2002–2003, with some of these also affiliated with the National Automatic Urban and Rural Network (AURN; http://uk-air.defra.gov.uk). Out of these sites, we selected 45 for which the proportion of missing data, in each year, did not exceed 20%. The missing observations were assumed to be missing at random. The average proportion of missing data for the 45 sites in the study period was 5.1% (range: 0−17.4). The mean distance between the selected sites was 16,967 m (range: 657−45,298). The majority of measurements were made using the Tapered Element Oscillating Microbalance method using TEOM 1400a and 1400ab analysers (Thermo Scientific). These instruments are known to underestimate the PM10 concentrations owing to losses of semivolatile constituents (such as ammonium nitrate and organic aerosols);24, 25 therefore, a default adjustment factor of 1.3 was applied.26 Eight sites were equipped with Beta Attenuation Monitors (Met-One BAM), where a correction factor of 0.82 was applied according to the results of UK trails.27
(2) Output from the high spatial resolution Air Dispersion Modelling System (ADMS-Urban; CERC, Cambridge, UK):28, 29 ADMS-Urban was used to represent the local primary competent of PM10. It simulates the dispersion into the atmosphere of pollutants released from road traffic, industrial and domestic sources across urban areas and integrates emissions inventories with meteorological data. We obtained emissions factors from the London Atmospheric Emissions Inventory (LAEI), which contains data on road network geometry comprising about 60,000 individual road links attributed with traffic flows and composition. Roads are represented as line sources in ADMS-Urban with a spatial accuracy of <1 m. Point and area source emissions were aggregated in the LAEI to 1 km resolution grids. This is a relatively quick method for modelling poorly defined or diffuse sources in the dispersion model. Dispersion from road sources used a Gaussian plume model with a non-Gaussian plume profile in convective conditions to account for the skewed structure of the vertical component of turbulence. Grid sources were modelled using a simple trajectory model. Output from both models was combined to predict pollutant concentrations at point locations, namely air pollution monitoring sites. Meteorological data included in ADMS-Urban were obtained from the British Atmospheric Data Centre for the nearest site.
(3) Mass measurements from rural monitoring sites: Background concentrations, as proxy of the long range transport of PM10, were sourced from two rural monitoring stations, approximately equidistant from London: Harwell (near Didcot, Oxfordshire; 81 km north-west of London, towards the West Midland conurbation) and Detling (Kent; 50 km south-east of London towards continental pollution sources areas). The Pearson’s correlation coefficient between the two time series was 0.6 (P-value <0.001), indicating that these measurement sites provided different information about the long-range transported air pollution affecting London.
In addition, we considered the following set of covariates:
(1) Type of site, which accounted for different environmental conditions. The LAQN monitoring sites were classified into different types, depending on their location. Of the 45 sites selected for the study, 8 were suburban sites (located in residential areas on the outskirts of London), 13 were urban background sites (located away from major sources and broadly representative of city-wide background concentrations), 20 were roadside sites (located from 1 to 5 m from a major carriageway) and 4 were kerbside sites (located within 1 m of a major road carriageway).
(2) Day of the week, which accounted for unknown changes in emissions between weekdays and weekend days, because emission inventories are not time-varying but only contain annual totals. The indicator variable for day of the week was categorised as Monday–Friday, Saturday and Sunday or Public Holiday.
(3) Average daily temperature to describe seasonal changes in chemistry between primary and regional secondary PM10. Other meteorological variables were not considered as these are used in the ADMS-Urban model; however, this does not include secondary PM10 formation, and thus daily mean temperature was used as a surrogate for such processes. Over the 2002–2003 years, the average temperature, recorded at London Heathrow, was 11.9 °C, with daily mean ranging between −1.3 and 28.2 °C.
Exploratory Data Analysis
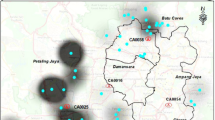
Figure 1 presents the geographical location of the 45 monitoring sites across Greater London by site type. As we found little difference between the PM10 concentrations at suburban and urban background sites, we aggregated these two categories.

Location and siting characteristics of the air quality monitoring sites in Greater London selected for the study.
Figure 2 shows the correlation of daily data for pairs of monitoring sites as a function of their separation distance. The correlations were generally high, also over long distances (≥30,000 m), indicating that factors other than distance may have a role in explaining the spatial variability of PM10 levels.

Correlation between pairs of monitoring sites as a function of their separation distance.
Figure 3 presents the daily levels of PM10 across the 45 monitoring sites sorted from the top to the bottom by decreasing longitude, during the 2 year in study.30 The daily values are displayed according to the tertiles computed on the global data set to ensure the comparability of the time series and assigned to low (brown), medium (pale green) and high (green) categories of PM10 concentrations. The bottom of the plot shows the daily median values across all the time series. The PM10 pollution episodes that London experienced during February, March, April, August, September and November 2003 are clearly visible. These episodes were mainly caused by secondary PM10 from distant sources, with summer episodes also being linked to photochemistry.31 The November 2003 episode was associated with Guy Fawkes Night fireworks and bonfires.32

Daily particle concentrations for the 45 monitoring sites sorted from the top to the bottom by decreasing longitude (from west to east). Each time series is assigned to low (brown), medium (pale green) and high (green) category of pollution levels (i.e. tertiles based on data from all the 45 time series); missing data are denoted by the colour white. The bottom panel shows the daily median concentrations across the time-series.
The analysis via cross-correlogram of the time series of PM10 concentrations observed in Greater London and the local component of PM10 captured from ADMS-Urban output, presented in Figure 4, shows that the correlation was relatively high and positive at lag 0 (same day pollution levels), suggesting that the numerical model captured the time variation of PM10 observed at monitoring sites.

Cross-correlogram between the time series of particle concentrations in Greater London and the ADMS-Urban output (on log-scale). The graph shows that at lag 0 (same day pollution levels), there is a positive contemporaneous correlation between observed data at monitoring sites and ADMS-Urban output.
Modelling Approach
We denoted Z(t,s) as the log-transformed daily PM10 concentrations, with t=1,...,T=728 (days) and s=1,...,n=45 (sites of the pollutant monitoring network). We assumed that the observed monitoring data were characterised by measurement error defined by a zero-mean Gaussian white noise process. We specified a Gaussian likelihood for Z(t,s):

where μ(t,s) represents the mean process driven by covariates varying over space and time and σ2(s) is the site-specific measurement error variance.4 We considered a class of different nested statistical formulations for the mean space–time process, μ(t,s), that differently accounted for factors affecting the spatiotemporal properties of particle concentrations.
Model I represented a simple statistical structure where the daily measurements at each monitoring site were assumed to be a function of a residual mean concentration across the urban area and a latent pollutant process described by the long-range transported proportion of particulate. The time-varying latent regional process was included assuming that concentrations at the city scale derive largely from information borrowed from rural measurements. It assumed the form:
Model I:

where α is the residual intercept and μlrt(t) represents the mean of the latent process.
In particular, let j denote several available rural background monitoring sites around the metropolitan area, with j=1,...,J. We assumed that the time series of pollution data from the rural monitoring sites are a reflection of an underlying long-range transport of particles into the urban area, measured with error:

In our application, this latent process was driven by the two time series of PM10 measured at the Harwell and Detling rural background sites (j=1,2).
This simple model accounted for the temporal variability of the pollution process, but did not incorporate a spatial structure. The model describes the main hypothesis in the definition of air pollution exposure in ecological time series studies, where the pollution estimates for a given study region, are generally free from a spatial dimension, although these studies typically use averaged ambient pollutant levels from one or more background motoring stations to represent the exposure experienced by a study population.
Model II added to the constant, α, the local city primary PM10 component described by ADMS-Urban,  (t,s):
(t,s):
Model II:

A spatially varying coefficient model33 was used for this component to capture the effect of site. We assumed (β1=β1,1,…,β1,n)T to be distributed according to a zero-centred multivariate Gaussian distribution β1∼MVN(0,ω2H(ϕ)), where ω2>0 is the spatial effect variance parameter and H represents the spatial correlation matrix. In this paper, Hss′ is described by an exponential function34  , where d=||s−s′|| and ||.|| indicates the Euclidean distance between two generic sites s and s′, and ϕ is the (non-negative) decay parameter that represents the rate of decline of spatial correlation among sites over distance. This spatial structure for the ADMS-Urban output provided a realistic representation of the spatial variability observed in the explorative analysis. However, we would expect a poor performance of this model as it did not account for the temporal variability in the pollution process.
, where d=||s−s′|| and ||.|| indicates the Euclidean distance between two generic sites s and s′, and ϕ is the (non-negative) decay parameter that represents the rate of decline of spatial correlation among sites over distance. This spatial structure for the ADMS-Urban output provided a realistic representation of the spatial variability observed in the explorative analysis. However, we would expect a poor performance of this model as it did not account for the temporal variability in the pollution process.
Model III included both the regional and the local primary PM10 components:
Model III:

Model IV was performed to explore the effect of the set of covariates (without regional and local PM10 components):
Model IV:

where type is the type of site, dow is the day of the week and temp is the temperature. In particular, we used site type to represent possible difference in concentration levels, as road and kerb sites are likely to have higher concentrations as they are closer to traffic source of pollution; daily mean temperature to describe chemical processes affecting local PM10 concentrations that are not considered in local-scale dispersion models and day of week to account for time-varying emission rates that are not described in emissions inventories. In Eq. (6), the fixed-effects coefficients β2 and β3 are unknown parameters for the variables site type and day of the week. The vector β4(t)=(β4(1),...,β4(T))T is the dynamic parameter associated with the temperature built according to a Gaussian second-order random walk (RW2), which was found provide the best smoothness prior for this variable. It assumed the form:  for t=1,...,T−2, where
for t=1,...,T−2, where  is the variance. A RW2 acts as a smoothness prior based on the second difference and penalises deviations from a linear trend.35 This prior, for regular time-point, provides enough flexibility because of its invariance under addition and it is computationally convenient because of its Markov properties.36 The choice of this prior followed an initial explorative analysis where we found that the relationship between temperature and PM10 concentrations (not shown) was potentially well described by a cubic smoothing spline. The RW2 is a discrete-time analogue of a cubic smoothing spline.37
is the variance. A RW2 acts as a smoothness prior based on the second difference and penalises deviations from a linear trend.35 This prior, for regular time-point, provides enough flexibility because of its invariance under addition and it is computationally convenient because of its Markov properties.36 The choice of this prior followed an initial explorative analysis where we found that the relationship between temperature and PM10 concentrations (not shown) was potentially well described by a cubic smoothing spline. The RW2 is a discrete-time analogue of a cubic smoothing spline.37
Model V finally represented the full model that accounted for the regional and local PM10 components and for the covariates:
Model V:

Parameter Priors and Implementation
A Gaussian prior distribution with mean zero and variance 102 was assigned to the intercept α, and to the fixed-effects coefficients β2 and β3. To ensure identifiability, we fixed the first category of these two parameters as zero (β2,1=0 and β3,1=0). The same Gaussian prior was chosen for the mean of the latent background process. Weakly informative inverse-Gamma hierarchical priors were specified for the error variance variables σ2(s)∼IG(a,b), s=1,...,n, and  , j=1,...,J, setting the hyperpriors (a,b,c,d) as IG(1,0.1). Similarly, inverse-Gamma priors were specified for the between-site variance component ω2 and the variance of the RW2
, j=1,...,J, setting the hyperpriors (a,b,c,d) as IG(1,0.1). Similarly, inverse-Gamma priors were specified for the between-site variance component ω2 and the variance of the RW2  with hyperparameters IG(1,0.1).
with hyperparameters IG(1,0.1).
We assumed a discrete uniform prior distribution for the decay parameter ϕ as suggested by Diggle and Ribeiro,38 with range chosen based on prior beliefs about the minimum and maximum correlation at the smallest and largest distances. Typically, locations close in space are assumed to be characterised by a stronger degree of correlation, but we did not want to assume a strong prior on it and we allowed for a range of correlation between 0.10 and 0.99. For large separation distances, we specified a range between 0.01 and 0.65.
The models were implemented in WinBUGS,39 a freely available software to perform Bayesian inference via Markov chain Monte Carlo (MCMC) simulative method.40 Two parallel MCMC chains with different starting values were run for each model. We ran 60,000 iterations with 50,000 burn-in and thinned the Markov chains by a factor of 10, resulting in samples of size 2000 to estimate the posterior distributions for the parameters of interest. Posterior correlation was reduced by a grand mean centring of the covariates.41 Convergence was assessed by checking the trace plots of the samples, the estimated kernel density plots, the autocorrelation functions, and a Monte Carlo errors <5% of the posterior standard deviation.
Comparison with Models Implemented with Varying Intercepts
The model formulation proposed in our paper deviates from the standard spatiotemporal statistical models that include varying intercepts (baseline concentrations) that are spatially or temporally correlated.4, 6, 8, 14, 16 The most common setting assumes that the spatial and temporal dependences are introduced into the modelling in the form of random effects. Thus, pollution concentrations characterised by a Gaussian likelihood are typically related to a trend surface model together with additive-independent random spatiotemporal effects that in a simple implementation can assume the form:

Here, β is a vector of regression coefficients associated with the covariates X(t,s). The residual is partitioned into a temporal, θ(t), a spatial, η(s), and an independent process ɛ(t,s), which is Gaussian with zero mean and σ2(s) variance. As a comparison with our approach, we have considered a model implementation within this classical framework using the same set of data. We developed five nested hierarchical structures that incorporated separable random space and time effects.
The first model was given by:
Model Ia:

The parameters θ(t)=(θ1,...,θT)T should capture the residual temporal dynamics characterising the pollutant process. This temporal process was described using an autoregressive first-order non-stationary model as daily dependence in air particulate concentrations can be expected,8 and was built as  for t=1,...,T−1. The term η(s)=(η1,...,ηn)T represents a spatially varying intercept that we assumed described by a zero-centred Gaussian process with variance
for t=1,...,T−1. The term η(s)=(η1,...,ηn)T represents a spatially varying intercept that we assumed described by a zero-centred Gaussian process with variance  and an exponential correlation function that depend upon the intersite distance and the parameter ϕ quantifying the correlation decay.
and an exponential correlation function that depend upon the intersite distance and the parameter ϕ quantifying the correlation decay.
Model IIa also included the latent regional process defined as in Eq. (3):
Model IIa:

Model IIIa added to the random effects of the urban local component of PM10 described by ADMS-Urban:
Model IIIa:

The space-varying slope β1=(β1,1,...,β1,n)T was built according to a Bayesian isotropic kriging,34 as specified in our main analysis.
Model IVa incorporated both the long-range and the local components of PM10:
Model IVa:

Model Va included exclusively the spatiotemporal random intercepts and the covariates type site, day of the week and daily mean temperature:
Model Va:

Similar to the main analysis, we also tried to implement a full model as:
Model VIa:

However, it resulted overparameterised and yielded implausible predictions, and thus we decided not to present the results from this model.
Models Ia–Va were specified assuming for the variance parameters  and
and  inverse-Gamma priors IG(1,0.1). The other priors were specified as in the main analysis.
inverse-Gamma priors IG(1,0.1). The other priors were specified as in the main analysis.
Performance Assessment
To compare our models, we partitioned the monitoring network into three sets of sites following these steps: (i) we stratified the 45 sites by type (urban/suburban, roadside and kerbside sites), (ii) we chose a random sample of nine sites, representative of the entire network (with respect to the number of sites of each type) as validation data for testing the models, and (iii) we retained the other 36 sites as training data to fit the models. We repeated steps (i)–(iii) three times (so each site entered into the validation data once).
To evaluate the predictive performance of the models, we compared the predicted PM10 concentrations against the observed measurements on the validation set via the following indices: the empirical coverage of 90% credible intervals (90% CI) coupled with their average length, the squared correlation coefficient (R2) and the root mean square error (RMSE).14 Lower values of RMSE indicate more similarity among observed measurements and predicted values. To obtain these indices, for each model we used the full posteriors from each Markov chain and we combined the predicted values from the three sets. This same procedure was used to summarise the results for the parameters evaluation.
Sensitivity Analysis
Sensitivity analysis was performed in order to:
(1) Assess the performance of our modelling approach in urban environments that have a monitoring network less dense than in London. The EU Air quality directive (2008/50/EC) stipulates the minimum population-dependent measurement requirements for EU cities. With 36 European cities with populations above 1 million and 9 above 2 million,42 we considered that testing the methodology on a sample of 10 measurement sites (matching the minimum number of monitoring sites for a city of 2.75 million population) would provide an assessment of applicability in a typical city. A city of 2.75 million would be smaller than the total area of Greater London. To this end, we considered the north-west boroughs in Greater London only and selected 10 sites as training set and 3 sites as validation set, representative of 3 site types, following the methodology described for the main analysis.
(2) Investigate whether results remained essentially unchanged in the presence of different prior distributions. We considered commonly used inverse-Gamma priors for the variance parameters (measurement errors) σ2(s) and  : IG(0.5,0.0005) and IG(0.1,0.1). For the spatial effect variance parameter, ω2, and the random walk variance parameter,
: IG(0.5,0.0005) and IG(0.1,0.1). For the spatial effect variance parameter, ω2, and the random walk variance parameter,  , we tested the prior IG(0.001,0.001).
, we tested the prior IG(0.001,0.001).
RESULTS
Predictive Performance
Table 1 shows the cross-validation summary statistics. The results are reported on the original scale correcting for bias after logarithmic transformation.43 Moving from model I to model V, we noted a progressive improvement in the prediction capability, with exception of model II. However, we found that the validation indices improved heavily when the site-specific local component, described by ADMS-Urban output, was included in addition to the regional background component (as an example, the RMSE decreased from 11.11 for model II to 5.11 for model III). The incorporation of the selected covariates in models IV and V produced an additional increase in the cross-validation performance.
Figure 5 shows the Taylor diagrams44, 45 for the models, over (a) the whole study period and (b) a 2003 heat-wave event (days from 4 to 13 August 2003). This diagram represents a useful method for evaluating predictive performance, as it visualises simultaneously the centred RMSE (it is centred because the mean values of the observed and predicted data are subtracted first), the correlation coefficient (R) and the standard deviation of the observed and predicted values. In detail, the observed variability (i.e. the standard deviation) is plotted on the x-axis (specifically, the magnitude of the variability is measured as the radial distance from the origin of the plot), R is shown on the grey arc, whereas the RMSE is indicated by the concentric brown dashed lines emanating from the observed point. The Taylor diagram performed on the entire study period (plot a) showed a quite similar performance of the models from 3 to 5, with model V be the best as presenting the highest correlation, the least RMSE and a reasonable similar variability compared with the observations, and the poor performance of model II was also confirmed. However, the Taylor diagram obtained on a 10-day heat-weave event (plot b) to assess how the models performed in capturing these events, pointed out differences, with models II and model V performing worst in comparison to models I and III. This result could be explained by the fact that the heat-wave events of 2003 were dominated by the long-rang transport component.

Taylor diagrams showing the predictive performance of the five hierarchical models related to: (a) the entire period of study and (b) a 2003 heat-wave event (from 4 to 13 August 2003).
Predictive Performance of Models Implemented with Varying Intercepts
Table 2 presents the predictive ability of the models implemented using the classical approach given by space- and time-varying intercepts. Generally, the validation indices showed slightly worst values when compared with the cross-validation results from our modelling approach. However, for model IIIa including the spatiotemporal random effects and the urban local component of PM, we found lover prediction errors in comparison to model II of our main analysis. This result confirmed that without temporal dependencies, the predictive capability of ADMS-Urban yield poor performance.
Parameters Evaluation
In our modelling approach, we found that the time-varying latent regional process described by μlrt(t) had similar behaviour in models I, III and V. However, a visual inspection of the plot of the posterior mean of μlrt(t) (not shown) pointed out a more evident daily variability in model V.
The range (on log-scale) of the posterior mean of the spatial coefficients, β1(s), associated with ADMS-Urban output, varied in model II from 0.005 to 0.333, in model III from 0.005 to 0.371, whereas in model V this ranged from −0.001 to 0.238. This suggested a weaker effect of the local PM10 component when the covariates were included in model V.
Through the analysis of the decay parameter, ϕ, we found coherent results in models II, III and V, across all sets, for the spatial correlation among sites. Specifically, we observed high correlation at minimum distance between sites, ∼0.97, that decayed progressively, being ∼0.50 at mean distance, and ∼0.24 at maximum distance.
Table 3 presents the posterior mean estimates and their 90% CI for the fixed effects and for the variance parameters. The residual mean concentration, α, remained constant among the models. Instead, we found a strong effect of the site type described by β2, indicating that PM10 concentrations were greater for road and kerb sites than for suburban/urban sites, as expected. A negative relationship was estimated between PM10 and day of the week (described by β3), as the concentrations were lower on the weekends than on weekdays.
The effect of the temperature on PM10 showed a considerable variability, especially for coefficients related to the spring days. The RW2 variance parameter  was definitely bigger in model IV in comparison to model V.
was definitely bigger in model IV in comparison to model V.
Finally, with the exception of model II, we noted a progressive decrease in the measurement error variance across the models. This reduction underlined the contribution given by the adjustment for covariates to explain part of the variability in the estimated PM10 concentrations.
Sensitivity Analysis Results
Table 4 describes the results related to the predictive ability of our modelling approach on a restricted number of monitoring sites in north-west London. We found that the indices were consistent with those reported in the main analyses (Table 1).
We performed also an assessment of the sensitivity of findings to prior details and these analyses showed that the results were quite robust to these choices.
DISCUSSION
We have presented a Bayesian spatiotemporal approach for modelling particulate pollution concentrations in urban area for health risk studies. We combined air monitoring data with the output from a local-scale air pollution model and explicitly solved the problem of incorporating regional pollution concentrations within the city-scale assessment. Moreover, we assessed the effects of covariates to account for the residual spatiotemporal variation of particle concentrations. We evaluated the predictive performance of these statistical structures through a robust procedure of cross-validation that allowed us to compare the daily predictions with the observed PM10 concentrations within three validation sets of sites, which represented different urban environment (i.e. site types).
In particular, we applied our modelling approach to predict PM10 concentrations in Greater London, using a latent regional pollution process derived by rural sites to describe the long-range transport PM10 component and the output from ADMS-Urban to capture the local primary PM10 component.
ADMS-Urban is widely used for estimating urban-scale air pollution for regulatory purposes and in epidemiological air pollution studies.46, 47 We found that the exclusive use of ADMS-Urban to predict the PM10 concentrations produces poor results. So far, although the inclusion of ADMS-Urban, in addition to a regional latent process, increases the predictive performance of the models, we suggest that the use of this deterministic output to measure the population exposure to PM in short-term epidemiological studies should be enhanced with the combination of other information sources characterising the study area, such as site-type or time-varying emission factors linked to day of the week, as evidenced by the strength of the covariates in our models.
In this implementation, we adopted an indicator variable for site types that is actually quite crude. The use of a more localised index of sites better reflecting land use and building geometry (canyon orientation for example) by utilising GIS techniques may further improve our model performance.
The final aim of our study was to assess air PM exposure models to use in short-term health effects studies in London. We therefore worked with the dense monitoring network available owing to the city size and the legal structures for local air quality management. To assess the applicability of our approach in urban environment with smaller number of monitoring sites, we performed a sensitivity analysis restricting the study area to a part of London matching the minimum requirements in EU directives. The results suggested that our approach will also perform well in smaller urban environments with more sparse monitoring networks, which are typical of many European cities.
Methodologically, the models presented here deviate from the standard space–time statistical modelling approach, which typically presents varying intercepts.4, 6, 8, 14, 16 As we were including in our models a set of covariates characterised by spatial and temporal variation, we assumed only time- and space-varying regression coefficients. To assess the plausibility of our approach in comparison with a classical modelling scenario, we developed five models, with independent spatiotemporal random effects. We assessed the predictive capability of these structures, and we found that our methodology, applied in an urban environment, performed better than the classical approach. This evidence suggests that, in context where local and urban primary emissions together with regional background data are not available, the inclusion in the models of independent error distributions is able to capture spatial and temporal dependencies. However, in context of analysis, where the researchers can perform extra modelling efforts, our proposed models perform better than a classical approach.
Finally, the hierarchical methodology that we proposed in this study provided a flexible way to model daily PM. This approach could also be applied to other environmental space–time processes (e.g. to model time series of different ambient primary or secondary pollutants) and used to predict non-daily data (e.g. hourly).
References
Briggs DJ, de Hoogh C, Gulliver J, Wills J, Elliott P, Kingham S et al. A regression-based method for mapping traffic related air pollution: application and testing in four contrasting urban environments. Sci Total Environ 2000; 253: 151–167.
Hoek G, Beelen R, de Hoogh K, Vienneau D, Gulliver J, Fischer P et al. A review of land-use regression models to assess spatial variation of outdoor air pollution. Atmos Environ 2008; 42: 7561–7578.
Gulliver J, Morris C, Lee K, Vienneau D, Briggs D, Hansell A . Land use regression modeling to estimate historic (1962–1991) concentrations of black smoke and sulfur dioxide for Great Britain. Environ Sci Technol 2011; 45: 3526–3532.
Shaddick G, Wakefield J . Modelling daily multivariate pollutant data at multiple sites. J R Stat Soc Ser C 2002; 51: 351–372.
Huerta G, Sanso B, Stroud JR . A spatiotemporal model for Mexico City ozone levels. J R Stat Soc Ser C 2004; 53: 231–248.
Sahu SK, Gelfand AE, Holland DM . Spatio-temporal modeling of fine particulate matter. J Agric Biol Environ Stat 2006; 11: 61–86.
Sahu SK, Gelfand AE, Holland DM . High resolution space–time ozone modeling for assessing trends. J Am Stat Assoc 2007; 102: 1221–1234.
Cocchi D, Greco F, Trivisano C . Hierarchical space–time modelling of PM10 pollution. Atmos Environ 2007; 41: 532–542.
Chang HH, Peng RD, Dominici F . Estimating the acute health effects of coarse particulate matter accounting for exposure measurement error. Biostatistics 2011; 12: 637–652.
Cameletti M, Ignaccolo R, Bande S . Comparing spatio-temporal models for particulate matter in Piemonte. Environmetrics 2011; 22: 985–996.
National Research Council. Models in Environmental Regulatory Decision Making. The National Academies Press: Washington, DC, USA. 2007 Available at www.nap.edu/catalog/11972.html.
Fuentes M, Raftery AE . Model evaluation and spatial interpolation by Bayesian combination of observations with outputs from numerical models. Biometrics 2005; 61: 36–45.
McMillan N, Holland DM, Morara M, Feng J . Combining numerical model output and particulate data using Bayesian space–time modeling. Environmetrics 2010; 21: 48–65.
Sahu SK, Yip S, Holland DM . Improved space–time forecasting of next day ozone concentrations in the Eastern US. Atmos Environ 2009; 43: 494–501.
Sahu SK, Gelfand AE, Holland DM . Fusing point and areal level space–time data with application to wet deposition. J R Stat Soc Ser C 2010; 59: 77–103.
Berrocal VJ, Gelfand AE, Holland DM . A spatio-temporal downscaler for output from numerical models. J Agric Biol Environ Stat 2010; 15: 176–197.
Berrocal VJ, Gelfand AE, Holland DM . A bivariate space–time downscaler under space and time misalignment. Ann Appl Stat 2010; 4: 1942–1975.
Gelfand AE, Sahu SK . Combining monitoring data and computer model output in assessing environmental exposure. In: O'Hagan A, West M (eds). Handbook of Applied Bayesian Analysis. Oxford University Press: Oxford, UK. 2010 pp 482–510.
Lenschow P, Abraham HJ, Kutzner K, Lutz M, Preuβ JD, Reichenbächer W . Some ideas about the sources of PM10. Atmos Environ 2001; 35: S23–S33.
Samet JM, Dominici F, Curriero FC, Coursac I, Zeger SL . Fine particulate air pollution and mortality in 20 US cities, 1987–1994. N Engl J Med 2000; 343: 1742–1749.
Atkinson R, Anderson H, Sunyer J, Ayres J, Baccini M, Vonk J et al. Acute effects of particulate air pollution on respiratory admissions: results from APHEA 2 project. Am J Respir Crit Care Med 2001; 164: 1860–1866.
Analitis A, Katsouyanni K, Dimakopoulou K, Samoli E, Nikoloulopoulos AK, Petasakis Y et al. Short-term effects of ambient particles on cardiovascular and respiratory mortality. Epidemiology 2006; 17: 230–233.
Solberg S, Coddeville P, Forster C, Hov Ø, Orsolini Y, Uhse K . European surface ozone in the extreme summer 2003. Atmos Chem Phys 2005; 5: 9003–9038.
Allen G, Reiss R . Evaluation of the TEOM method for measurement of ambient particulate mass in urban areas. J Air Waste Manage 1997; 47: 682–689.
Green D, Fuller G, Barratt B . Evaluation of TEOMTM ‘correction factors’ for assessing the EU stage 1 limit values for PM10. Atmos Environ 2001; 35: 2589–2593.
DETR. Assistance with the Review and Assessment of PM10 Concentration in Relation to the Proposed EU Stage 1 limit values. HMSO: London, UK. 1999.
Harrison DUK . Equivalence Programme for Monitoring of Particulate Matter, Ref: BV/AQ/AD202209/DH/2396 DEFRA: London, UK. 2006.
McHugh CA, Carruthers DJ, Edmunds HA . ADMS and ADMS-Urban. Int J Environ Pollut 1997; 8: 438–440.
Carruthers DJ, Edmunds HA, Lester AE, McHugh CA, Singles RJ . Use and validation of ADMS-Urban in contrasting urban and industrial locations. Int J Environ Pollut 2000; 14: 364–374.
Peng RD . A method for visualizing multivariate time series. J Stat Softw 2008; 25: 1–17.
Fuller G, Green D . Evidence for increasing concentrations of primary PM10 in London. Atmos Environ 2006; 40: 6134–6145.
Fuller G . Air Quality in London 2003. Final Report. King’s College London, Environmental Research Group: London, UK. 2005 Available at: www.londonair.org.uk/london/reports/AirQualityInLondon2003.pdf (last accessed date 25 June 2013).
Gelfand AE, Kim H-J, Sirmans CF, Banerjee S . Spatial modeling with spatially varying coefficient processes. J Am Stat Assoc 2003; 98: 387–396.
Banerjee S, Gelfand AE, Carlin BP . Hierarchical Modeling and Analysis for Spatial Data. Chapman & Hall/CRC: Boca Raton, FL. 2004.
Lee D, Shaddick G . Modelling the effects of air pollution on health using Bayesian dynamic generalised linear models. Environmetrics 2008; 19: 785–804.
Lindgren F, Rue H . On the second-order random walk model for irregular locations. Scand J Stat 2008; 35: 691–700.
Chiogna M, Gaetan C . Dynamic generalized linear models with applications to environmental epidemiology. J R Stat Soc Ser C 2002; 51: 453–468.
Diggle P, Ribeiro P . Model-Based Geostatistics. Springer: New York, NY, USA. 2007.
Lunn DJ, Thomas A, Best N, Spiegelhalter D . WinBUGS — a Bayesian modelling framework: concepts, structure, and extensibility. Stat Comput 2000; 10: 325–337.
Gilks WR, Richardson S, Spiegelhalter DJ . Markov Chain Monte Carlo in Practice. Chapman & Hall: Boca Raton, FL, USA. 1998.
Hox J . Multilevel Analysis. Techniques and Applications. Lawrence Erlbaum Associates: Englewood Cliffs, NJ. 2002.
City Mayors Statistics Europe’s largest cities — Cities ranked 1 to 100. City Mayors 2012 Available at: http://www.citymayors.com/features/euro_cities1.html (last accessed date 2 August 2013).
Beauchamp JJ, Olson JS . Corrections for bias in regression estimates after logarithmic transformation. Ecology 1973; 54: 1403–1407.
Taylor K . Summarizing multiple aspects of model performance in a single diagram. J Geophys Res 2001; 106: 7183–7192.
Carslaw DC, Ropkins K . Openair — an R package for air quality data analysis. Environ Model Softw 2012; 27–28: 52–61.
Laurent O, Pedrono G, Segala C, Filleul L, Havard S, Deguen S et al. Air pollution, asthma attacks, and socioeconomic deprivation: a small-area case-crossover study. Am J Epidemiol 2008; 168: 58–65.
Blangiardo M, Richardson S, Gulliver J, Hansell A . A Bayesian analysis of the impact of air pollution episodes on cardio-respiratory hospital admissions in the Greater London area. Stat Methods Med Res 2011; 20: 69–80.
Acknowledgements
This work was partially supported by (i) the Traffic Pollution and Health in London Grant (NE/I008039/1) from the National Environment Research Council, Medical Research Council, Economic and Social Research Council, Department of Environment, Food and Rural Affairs and Department of Health and (ii) the ALSPAC Grant (P13646_DFHM) from the Medical Research Council.
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Competing interests
The authors declare no conflict of interest.
Rights and permissions
This work is licensed under a Creative Commons Attribution-NonCommercial-NoDerivs 3.0 Unported License. To view a copy of this license, visit http://creativecommons.org/licenses/by-nc-nd/3.0/
About this article
Cite this article
Pirani, M., Gulliver, J., Fuller, G. et al. Bayesian spatiotemporal modelling for the assessment of short-term exposure to particle pollution in urban areas. J Expo Sci Environ Epidemiol 24, 319–327 (2014). https://doi.org/10.1038/jes.2013.85
Received:
Accepted:
Published:
Issue date:
DOI: https://doi.org/10.1038/jes.2013.85
Keywords
This article is cited by
-
Pedestrian exposure to black carbon and PM2.5 emissions in urban hot spots: new findings using mobile measurement techniques and flexible Bayesian regression models
Journal of Exposure Science & Environmental Epidemiology (2022)
-
Quantifying the impact of current and future concentrations of air pollutants on respiratory disease risk in England
Environmental Health (2017)
