
Abstract
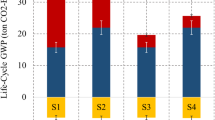
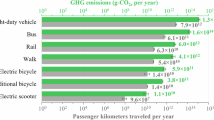
Autonomous vehicles (AVs) are conveyances to move passengers or freight without human intervention. AVs are potentially disruptive both technologically and socially1,2,3, with claimed benefits including increased safety, road utilization, driver productivity and energy savings1,2,3,4,5,6. Here we estimate 2014 and 2030 greenhouse-gas (GHG) emissions and costs of autonomous taxis (ATs), a class of fully autonomous7,8 shared AVs likely to gain rapid early market share, through three synergistic effects: (1) future decreases in electricity GHG emissions intensity, (2) smaller vehicle sizes resulting from trip-specific AT deployment, and (3) higher annual vehicle-miles travelled (VMT), increasing high-efficiency (especially battery-electric) vehicle cost-effectiveness. Combined, these factors could result in decreased US per-mile GHG emissions in 2030 per AT deployed of 87–94% below current conventionally driven vehicles (CDVs), and 63–82% below projected 2030 hybrid vehicles9, without including other energy-saving benefits of AVs. With these substantial GHG savings, ATs could enable GHG reductions even if total VMT, average speed and vehicle size increased substantially. Oil consumption would also be reduced by nearly 100%.
This is a preview of subscription content, access via your institution
Access options
Subscribe to this journal
Receive 12 print issues and online access
$259.00 per year
only $21.58 per issue
Buy this article
- Purchase on SpringerLink
- Instant access to the full article PDF.
USD 39.95
Prices may be subject to local taxes which are calculated during checkout



Similar content being viewed by others
References
Templeton, B. Where Robot Cars (Robocars) Can Really Take Us (2013); http://www.templetons.com/brad/robocars
Brown, A., Gonder, J. & Repac, B. in Road Vehicle Automation (eds Meyer, G. & Beiker, S.) 137–153 (Springer, 2014); http://dx.doi.org/10.1007/978-3-319-05990-7_13
Morrow, W. R. et al. in Road Vehicle Automation (eds Meyer, G. & Beiker, S.) 127–135 (Springer, 2014); http://dx.doi.org/10.1007/978-3-319-05990-7
Anderson, J. M. et al. Autonomous Vehicle Technology: A Guide for Policymakers (RAND, 2014); http://www.rand.org/content/dam/rand/pubs/research_reports/RR400/RR443-1/RAND_RR443-1.pdf
Folsom, T. C. Energy and autonomous urban land vehicles. IEEE Technol. Soc. Mag. 31, 28–38 (2012).
Troppe, W. RMI Outlet (9 September 2014); http://blog.rmi.org/blog_2014_09_09_energy_implications_of_autonomous_vehicles
National Highway Traffic Safety Administration, Provides Guidance to States Permitting Testing of Emerging Vehicle Technology (US Department of Transportation, 2013); http://www.nhtsa.gov/About+NHTSA/Press+Releases/ci.U.S.+Department+of+Transportation+Releases+Policy+on+Automated+Vehicle+Development.print
Emerging Technologies: Autonomous Cars- Not If, But When (IHS Automotive, 2014).
National Academies of Science Transitions to Alternative Vehicles and Fuels (National Academies Press, 2013); http://www.nap.edu/catalog.php?record_id=18264
Self-Driving Cars and Insurance (Insurance Information Institute, 2014); http://www.iii.org/issue-update/self-driving-cars-and-insurance
Energy Information Administration Annual Energy Outlook 2014 (US Department of Energy, 2014); http://www.eia.gov/forecasts/aeo14
US Environmental Protection Agency Federal Register Vol. 79,, 1429–1519 (National Archives and Records Administration, 2014).
Greenblatt, J. B. Modeling California policy impacts on greenhouse gas emissions. Energy Policy 78, 158–172 (2015).
US Driving Research and Innovation for Vehicle efficiency and Energy Sustainability Hydrogen Production Technical Team Roadmap (US Department of Energy, 2013); http://www1.eere.energy.gov/vehiclesandfuels/pdfs/program/hptt_roadmap_june2013.pdf
Federal Highway Administration National Household Travel Survey 2009 (US Department of Transportation, 2011).
Anthony, S. ExtremeTech (23 December 2014); http://www.extremetech.com/extreme/196384-google-unveils-its-first-built-from-scratch-self-driving-car
GM Shows Chevrolet EN-V 2.0 Mobility Concept Vehicle (General Motors, 2012); http://media.gm.com/content/media/us/en/chevrolet/news.detail.html/content/Pages/news/us/en/2012/Apr/0423_EN-V_2_Rendering.html
Preparing a Nation for Autonomous Vehicles: Opportunities, Barriers and Policy Recommendations (Eno Center for Transportation, 2013); https://www.enotrans.org/wp-content/uploads/wpsc/downloadables/AV-paper.pdf
The New York City Taxicab Fact Book (Schaller Consulting, 2006); http://www.schallerconsult.com/taxi/taxifb.pdf
Naughton, J. Do autonomous cars need to cost so much? The Guardian (1 June 2013); http://www.theguardian.com/technology/2013/jun/02/autonomous-cars-expensive-google-naughton
Seward, J. Mobileye NV Gains: Tesla Motors Inc. to Use Multiple Suppliers for Self-Driving Car. Benzinga (8 September 2014); http://www.benzinga.com/analyst-ratings/analyst-color/14/09/4833196/mobileye-nv-gains-tesla-motors-inc-to-use-multiple-suppl#
Autonomous Vehicles: Self-Driving Vehicles, Autonomous Parking, and Other Advanced Driver Assistance Systems: Global Market Analysis and Forecasts (Navigant Research, 2013).
Gomes, L. Urban Jungle a Tough Challenge for Googles Autonomous Cars. MIT Technology Review (24 July 2014); http://www.technologyreview.com/news/529466/urban-jungle-a-tough-challenge-for-googles-autonomous-cars
Cabanatuan, M. Northern California at center of driverless car development. San Francisco Chronicle (21 March 2015); http://www.sfchronicle.com/bayarea/article/Northern-California-at-center-of-driverless-car-6150543.php
Argonne National Laboratory Welcome to Autonomie (US Department of Energy, 2012); http://www.autonomie.net
GREET Mini-Tool and Sample Results from GREET 1 2013 (Argonne National Laboratory, 2013); http://greet.es.anl.gov/files/greet1_2013_results
Going Green (Metro Taxi Denver, 2013); http://www.metrotaxidenver.com/going-green
Fuel Cell Technologies Office Multi-Year Research, Development, and Demonstration Plan (US Department of Energy, 2014); http://energy.gov/sites/prod/files/2014/10/f19/fcto_myrdd_production.pdf
Cost of Owning and Operating Vehicle in US Increases Nearly Two Percent According to AAA’S 2013 “Your Driving Costs” Study. AAA NewsRoom (16 April 2013); http://newsroom.aaa.com/tag/cost-per-mile
US Energy Information Administration Annual Energy Outlook 2013 (US Department of Energy, 2013); http://www.eia.gov/forecasts/archive/aeo13
Ayre, J. Nissan LEAF Sets New Annual US Electric Car Sales Record—Yet Again. CleanTechnica (30 October 2014); http://cleantechnica.com/2014/10/30/nissan-leaf-sets-new-annual-us-ev-sales-record-yet
Brief specs of 2002 smart Fortwo Coupe Pure. CarSpector (25 November 2014); http://carspector.com/car/smart/051872
US Environmental Protection Agency Code of Federal Regulations Vol. 29, Ch. I (US Government Printing Office, 2006); http://www.gpo.gov/fdsys/pkg/CFR-2006-title40-vol29/pdf/CFR-2006-title40-vol29-chapI.pdf
2014 Taxicab Fact Book (New York City Taxi and Limousine Commission, 2014); http://www.nyc.gov/html/tlc/downloads/pdf/2014_taxicab_fact_book.pdf
Gordon-Bloomfield, N. San Francisco: Twice As Many Taxis Burn Half As Much Gas; Here’s How. Green Car Reports (15 Feb 2012); http://www.greencarreports.com/news/1072985_san-francisco-twice-as-many-taxis-burn-half-as-much-gas-heres-how
Economic Review of the Small Public Service Vehicle Industry (Commission for Taxi Regulation, Goodbody Economic Consultants, 2009); http://www.nationaltransport.ie/downloads/taxi-reg/economic-review-spsv-industry.pdf
US Bureau of Labor Statistics Historical Consumer Price Index for All Urban Consumers (CPI-U): US City Average, All Items (US Department of Labor, 2014); http://www.bls.gov/cpi/cpid1408.pdf
A Look at Historical Car Loan Interest Rates. Car Loan Pal (22 March 2011); http://www.carloanpal.com/car-loan-blog/2011/03/199-a-look-at-historical-car-loan-interest-rates.html
Current Auto Loan Interest Rates. Bankrate (25 September 2014); http://www.bankrate.com/finance/auto/current-interest-rates.aspx
Final Technical Support Document: Fuel Economy Labeling of Motor Vehicle Revisions to Improve Calculation of Fuel Economy Estimates EPA420-R-06-017 (US Environmental Protection Agency, 2006); http://www.epa.gov/carlabel/documents/420r06017.pdf
Methodologies for Estimating Fuel Consumption Using the 2009 National Highway Travel Survey (Energy Information Administration, 2011); http://nhts.ornl.gov/2009/pub/EIA.pdf
Saxena, S., Gopal, A. R. & Phadke, A. A. Electrical consumption of two-, three- and four-wheel light-duty electric vehicles in India. Appl. Energy 115, 582–590 (2013).
Acknowledgements
The authors thank A. Brown, J. Gonder, A. Gopal, D. Millstein, B. Morrow, S. Moura, N. Shah, A. Sturges, R. van Buskirk, J. Ward and T. Wenzel for insights and draft feedback. Special thanks go to C. Scown for analysing FHA data. Work was supported in part by Laboratory Directed Research and Development funding through Lawrence Berkeley National Laboratory, under US Department of Energy Contract No. DE-AC02-05CH11231.
Author information
Authors and Affiliations
Contributions
S.S. performed vehicle powertrain calculations; J.B.G. performed all other calculations and analysis. J.B.G. and S.S. wrote the manuscript and made any appropriate revisions.
Corresponding author
Ethics declarations
Competing interests
The authors declare no competing financial interests.
Supplementary information
Rights and permissions
About this article

Cite this article
Greenblatt, J., Saxena, S. Autonomous taxis could greatly reduce greenhouse-gas emissions of US light-duty vehicles. Nature Clim Change 5, 860–863 (2015). https://doi.org/10.1038/nclimate2685
Received:
Accepted:
Published:
Issue date:
DOI: https://doi.org/10.1038/nclimate2685
This article is cited by
-
Economic and environmental benefits of automated electric vehicle ride-hailing services in New York City
Scientific Reports (2024)
-
Future reductions of China’s transport emissions impacted by changing driving behaviour
Nature Sustainability (2023)
-
Energy and environmental impacts of shared autonomous vehicles under different pricing strategies
npj Urban Sustainability (2023)
-
Impacts of shared mobility on vehicle lifetimes and on the carbon footprint of electric vehicles
Nature Communications (2022)
-
Impacts of electrification & automation of public bus transportation on sustainability—A case study in Singapore
Forschung im Ingenieurwesen (2021)
