
Abstract
Synchronization of coupled oscillators is a fundamental process in both natural and artificial networks. While much work has investigated the asymptotic stability of the synchronous solution, the fundamental question of the transient behavior toward synchronization has received far less attention. In this work, we present the transverse reactivity as a metric to quantify the instantaneous rate of growth or decay of desynchronizing perturbations. We first use the transverse reactivity to design a coupling-efficient and energy-efficient synchronization strategy that involves varying the coupling strength dynamically according to the current state of the system. We find that our synchronization strategy is able to synchronize networks in both simulation and experiment over a significantly larger (often by orders of magnitude) range of coupling strengths than is possible when the coupling strength is constant. Then, we characterize the effects of network topology on the transient dynamics towards synchronization by introducing the concept of network syncreactivity: A network with a larger syncreactivity has a larger transverse reactivity at every point on the synchronization manifold, independent of the oscillator dynamics. We classify real-world examples of complex networks in terms of their syncreactivity.
Similar content being viewed by others
Introduction
The synchronization of networks of coupled oscillators has been the subject of intensive investigation, see e.g.,1,2,3,4. Compared to the analysis of stability of the synchronous solution, the question of the efficiency of the synchronization dynamics has received less attention5,6,7,8,9,10. However, all biological and technological systems must operate efficiently. In addition, these systems do not typically communicate at all times but often interact in a state-dependent fashion. For example, neurons in the brain transmit signals to other neurons after they ‘fire’11, and similar activation mechanisms have been found to describe interactions among fireflies synchronizing their flashing12,13 and the way pacemaker cells in the heart affect surrounding cells via short action potentials separated by long depolarization bouts14,15. Our goal in this paper is to design a synchronization strategy that is coupling-efficient and energy-efficient; i.e., it requires lower coupling strength on average and lower synchronization energy in comparison to the case of constant coupling. We show how coupling-efficiency and energy-efficiency of the synchronization dynamics can be achieved by a strategy which uses coupling only when needed, where the coupling strength is varied based on the specific regions of the attractor on which the synchronous solution evolves. In particular, we identify a property, the transverse reactivity of different points on the attractor, based on which we adjust the coupling strength.
Fundamental works have characterized the asymptotic stability of the synchronous solution by exploiting different tools. Algebraic conditions can be found for simple networks of phase oscillators16,17,18,19; these methods can be extended to more complex oscillators by using the phase resetting curve20 and its generalization21,22. Another widely used tool to compute the asymptotic stability of the synchronous solution is the master stability function (MSF)2,23,24,25, which employs the Lyapunov exponent to evaluate the asymptotic rate of growth or decay of perturbations transverse to the synchronous solution. For a given choice of oscillator and coupling function, the MSF evaluates the asymptotic stability of the synchronous solution in 4 steps: (i) describe the time evolution of perturbations of the network trajectory from the synchronous state, (ii) linearize the equations that describe the perturbations’ time evolutions, (iii) separate the perturbations parallel to the synchronization manifold from the ones transverse to it, and (iv) evaluate the rate of growth or decay of the transverse perturbations through the maximum transverse Lyapunov exponent. The MSF is the function that calculates the maximum transverse Lyapunov exponent as a function of the coupling strength and the network connectivity; therefore, it can be used to identify intervals of the coupling strength within which the synchronous solution is asymptotically stable for a given network topology.
Despite the abundance of work and tools in the study of the asymptotic stability of the synchronous solution, there is a lack of methods that study the transient dynamics toward synchronization.
An important characterization of the transient dynamics of a system is given by the reactivity26,27,28,29,30,31,32,33,34,35,36,37, which measures the instantaneous rate of growth or decay of the norm of the state vector. The reactivity can be thought of as an “instantaneous” finite time Lyapunov exponent38. However, the impact of the reactivity on the synchronization dynamics of complex networks of coupled oscillators is poorly understood. Indeed, while refs. 31,35 studied the effects of the reactivity on the stability of equilibrium points in networks of coupled dynamical systems, there has been no characterization of the reactivity for the general case of synchronization dynamics, in which all oscillators converge to a synchronous trajectory that evolves in time. In this work, we develop a general approach that employs the MSF paradigm to evaluate the transverse reactivity that can be applied to a broad variety of systems of identical oscillators, and we introduce the “syncreactivity” as an index of the reactivity of the synchronous solution that relates solely to the network topology. A network with a greater syncreactivity has a larger transverse reactivity at every point on the synchronization manifold, independent of the oscillator dynamics. We show an important link between syncreactivity and normality of the network: Normal networks have minimal syncreactivity.
Notice that the proposed method employs the MSF paradigm only to study the transient dynamics and therefore it can be used along with every tool able to analyze the asymptotic synchronization of a network (PRC and others).
A surprising outcome of our work is that by adjusting the coupling strength according to the instantaneous transverse reactivity, we achieve synchronization, both numerically and experimentally, over intervals of the average coupling strength that are significantly broader than those predicted by the MSF analysis for constant24 or rapidly time-varying39 coupling. In particular, we show that we can significantly lower the minimum average coupling strength needed for synchronization, and consequently, the energy expenditure required for synchronization. In both natural and artificial networks, this has important benefits regarding the actuators that can be used to achieve synchronization, as these are typically limited in the duration and the overall intensity of the coupling they can exert.
Overall, we find that combining transient information provided by the transverse reactivity with traditional asymptotic stability analysis provides an exhaustive characterization of the synchronization dynamics in complex networks. As we will show, our work has broad applications which include linear consensus36,40,41,42,43, nonlinear control of networked systems44,45,46,47, and the control of extreme events and dragon kings in noisy systems48.
Results
Transient synchronization dynamics and transverse reactivity
We consider directed networks of diffusively coupled homogeneous oscillators. The network is described by the adjacency matrix A = [Aij], where Aij ≥ 0 measures the strength of the directed coupling from node j to node i (Aij = 0 if there is no coupling from node j to node i.) The equations that describe the dynamics of the network nodes/oscillators are,
where N is the number of nodes/oscillators, xi(t) is the n-dimensional state of node/oscillator i at time t. The individual oscillator dynamics is given by F(xi(t)), and the node-to-node coupling interaction is described by the symmetric and positive semidefinite matrix H. The more general case that the node-to-node coupling function is nonlinear is studied in Supplementary Note 1. The Laplacian matrix is denoted by L = [Lij] where Lij = Aij − δij ∑k Aik, and δij is the Kronecker delta. By construction, \({\sum }_{j}^{N}{L}_{ij}=0,\forall i\). The scalar σ ≥ 0 is the coupling strength. We proceed under the assumption (which is required for the stability of the synchronous solution) that the network has a directed spanning tree49. Then, the Laplacian matrix has the set of eigenvalues {λi}, of which λ1 = 0, and all the others have negative real parts. Moreover, Re(λ1) > Re(λ2) ≥ … ≥ Re(λN), where Re( ⋅ ) notation indicates real part.
Equation (1) admits the synchronous solution x1(t) = x2(t) =…=xN(t) = s(t), which obeys the dynamics of a single uncoupled system,
which is independent of the coupling strength σ, the Laplacian matrix L, and the node-to-node coupling matrix H. We call \({{{\mathcal{A}}}}\) the attractor on which the synchronous dynamics (2) converges. This may be a chaotic attractor.
The transverse reactivity r measures the instantaneous rate of growth (r > 0) or decay (r < 0) of the norm of the state vector of desynchronizing perturbations, and can be thought of as an “instantaneous” finite-time Lyapunov exponent38. This relation to finite-time Lyapunov exponents is explained in detail in Supplementary Note 2. A point xs on the synchronous solution s(t) is said to be reactive (non-reactive) if r(xs) > 0 (r(xs) < 0). Figure 1 illustrates the concept of transverse reactivity. Panel a shows how the transverse reactivity affects the transient dynamics towards synchronization when synchronization is asymptotically stable. For a given system and set of initial conditions, a non-reactive coupling results in a direct convergence to the synchronous state, while a reactive coupling results in an initial increase in the separation between trajectories before an eventual settling down to the synchronous state in the long term. Panel b presents two unweighted network topologies, one of which is more “reactive” than the other. We consider a network of y-coupled Lorenz oscillators (see Methods “Example details” and Supplementary Note 3) and color the attractor lavender (green) to indicate points for which the synchronous dynamics are reactive (non-reactive). It is noteworthy that the reactive part of the attractor is larger for the more reactive network than it is for the less reactive one. We compare the time evolutions of the system defined on the two networks starting from the same initial condition, which has different reactivities for the different network topologies. We plot the distance from the synchronous state \(\parallel \! \! \delta \bar{{{{\boldsymbol{X}}}}}(t) \! \! \parallel\) (see Methods “Isolating the dynamics transverse to the synchronoussolution” and Supplementary Note 3) as a function of time. Although both networks eventually achieve synchronization, we see large peaks in the transient time evolution in the case of the more reactive network, while these are not seen in the case of the less-reactive topology. Supplementary Note 3 provides further illustrations of the effects of reactivity on the synchronization dynamics by showing how either the choice of the initial conditions or of the network topology affects the occurrence of initial surges in the norm of the motion transverse to the synchronization manifold.

(a) Illustrates the effects of reactivity on the transient dynamics towards synchronization of a simple 2-node network. For the set of initial conditions [x1(0), x2(0)] close to a point xs (black dot) belonging to the synchronous solution s(t) (black lines), a non-reactive coupling (r(xs) < 0) results in a direct convergence to the synchronous state (blue lines), while a reactive coupling (r(xs) > 0) results in an initial increase in the separation between trajectories before an eventual settling down to the synchronous state in the long term (orange lines). (b) Presents two unweighted networks of y-coupled Lorenz oscillators (see Methods “Example details”) with two different topologies (Network I and II). Reactive (non-reactive) points xs on the attractor \({{{\mathcal{A}}}}\) are depicted in lavender (green); therefore, the reactivity of green points is lower than the reactivity computed in lavender points. Based on the density of reactive points in the attractor, we can say that Network II is more `reactive' than Network I. Indeed, we see the occurrence of jumps in the distance from the synchronous state \(\parallel \! \! \delta \bar{{{{\boldsymbol{X}}}}}(t)\! \! \parallel\) (and therefore in the transverse motion to the synchronization manifold) for the more reactive network II (evolution in red), but not for network I (evolution in blue).
We now provide as a novel contribution of this paper a precise definition of the transverse reactivity of a point on the attractor. The transverse reactivity of the perturbations about xs on the synchronous solution is given by
where operator e1( ⋅ ) computes the largest eigenvalue, DF(xs) is the Jacobian of F at xs and the quantity,
is often referred to as the algebraic connectivity of directed graphs49, as a generalization of the classical concept of algebraic connectivity for undirected graphs50. The matrix \(V\in {{\mathbb{R}}}^{N\times N-1}\) is an orthonormal basis for the null subspace of \([1\,1\ldots 1]\in {{\mathbb{R}}}^{1\times N}\), i.e., the matrix V is any matrix with normal columns that are orthogonal to \({[11\ldots 1]}^{\top }\in {{\mathbb{R}}}^{N}\) and to each other. See Methods “Isolating the dynamics transverse to the synchronoussolution” for detailed derivation and discussion of the transverse reactivity r(xs).
The mapping that associates to each point xs of the attractor \({{{\mathcal{A}}}}\) to its transverse reactivity r(xs), defines the reactive characterization of the attractor\({{{\mathcal{C}}}}({{{\mathcal{A}}}})\). A sufficient condition for ξ = Re(λ2) is that the Laplacian matrix L is normal. It also follows that for all undirected networks, ξ = λ2.
Supplementary Note 4 presents upper and lower bounds for ξ. In particular, we prove that ξ ≤ 0 for minimally reactive networks36, i.e., a class of networks for which the largest eigenvalue of the symmetric part of the Laplacian is zero. These networks, also known as balanced networks, are such that the in-degree and the out-degrees of each node are the same. Having a negative ξ implies that when the coupling strength is increased, the transverse reactivity of the points on the attractor either decreases or remains constant.
Supplementary Note 5 presents the values of the reactivity r(xs) over a few well-known chaotic attractors: Lorenz, Rossler, Chen, Forced Van Der Pol, the FitzHugh-Nagumo model, and the Hindmarsh-Rose model.
Efficient synchronization dynamics
Reactivity-based coupling scheme
As stated in the introduction, our goal is to achieve coupling-efficiency and energy-efficiency of the synchronization dynamics, by requiring lower coupling strength on average and lower synchronization energy in comparison to the case of constant coupling. To this end, we find that a simple modification to Eq. (1), in which the constant coupling strength σ is replaced by a time-varying one σ(t), can be extremely beneficial,
We call \({{{{\boldsymbol{u}}}}}_{i}(t)=\sigma (t){\sum }_{j=1}^{N}{L}_{ij}H{{{{\boldsymbol{x}}}}}_{j}(t)\) the synchronization input affecting node i in Eq. (5) and
the synchronization energy, corresponding to a given choice of the coupling strength σ(t) over the time interval [t0, tf], where t0 and tf > t0 are some preassigned times. Here, ∥ ⋅ ∥ is the 2-norm. Our definition of synchronization energy is derived from signal processing where the power of the scalar signal s(t) is equal to s(t)2 and the energy of the signal is equal to the integral of the power over time, \(\int_{-\infty }^{+\infty }s{(t)}^{2}dt\), see e.g.,51 We acknowledge here that based on the particular selection of the individual systems and of the node-to-node coupling function, one may consider other definitions of the synchronization energy that are system-specific.
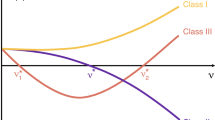
Our work applies to both cases that the MSF is negative in an unbounded range or bounded range of its argument2. When the range is unbounded (often referred to as Class II of the MSF), as we increase σ from zero, there is only one transition from asynchrony to synchrony (A → S) at the critical value σA→S. When the range is bounded (Class III of the MSF), as we increase σ from zero, first there is a transition from asynchrony to synchrony (A → S) at the critical value σA→S followed by another transition from synchrony to asynchrony (S → A) at the critical value σS→A > σA→S.
First, we consider the case of a transition from asynchrony to synchrony (A → S transition), for which the condition for stability of the synchronous solution is that σ > σA→S (the latter is a function of λ2). We proceed under the assumption that for a given choice of F, H, L, and constant coupling strength \(\bar{\sigma } \, < \, {\sigma }^{A\to S}\), the coupled oscillators in Eq. (5) will not synchronize. We aim to find a time-varying coupling strength σ(t) such that (a) the average coupling strength is \(1/T\int_{0}^{T}\sigma (t)dt=\bar{\sigma }\), where T is the total time, and (b) the coupled dynamical systems in Eq. (5) synchronize. We propose the following simple strategy which we call “coupling when needed” (CWN),
where γ and β are tunable parameters such that 0 ≤ γ ≤ 1 and \({\beta }_{\min } \, < \, \beta \, < \, {\beta }_{\max }\). The average solution at time t is \(\bar{{{{\boldsymbol{x}}}}}(t)=\frac{1}{N}{\sum }_{i=1}^{N}{{{{\boldsymbol{x}}}}}_{i}(t)\), and \({\beta }_{\min }={\min }_{{{{{\boldsymbol{x}}}}}_{s}\in {{{\mathcal{A}}}}}r({{{{\boldsymbol{x}}}}}_{s})\) and \({\beta }_{\max }={\max }_{{{{{\boldsymbol{x}}}}}_{s}\in {{{\mathcal{A}}}}}r({{{{\boldsymbol{x}}}}}_{s})\). The transverse reactivity \(r(\bar{{{{\boldsymbol{x}}}}}(t))\) is evaluated at \(\bar{{{{\boldsymbol{x}}}}}(t)\) using Eq. (3) with \(\sigma=\bar{\sigma }\). Here, the parameter 0 < τ < 1 is the fraction of the times when \(r(\bar{{{{\boldsymbol{x}}}}}(t)) \, > \, \beta\) and is a function of β. A good approximation for τ may be calculated beforehand using a long enough pre-recorded synchronous solution s(t), Eq. (2), as \(\tau=1/2+1/2{\left\langle {{{\rm{sign}}}}\left(r({{{\boldsymbol{s}}}}(t))-\beta \, \right)\right\rangle }_{t}\). Here, 〈⋅〉t denotes the time average over the interval t. The sign function returns 1, 0, or − 1 when the argument inside is positive, zero, or negative, respectively. As long as the initial conditions of the connected systems are close to the synchronous solution, the above approximation of τ is sufficiently close to the actual probability that \(r(\bar{{{{\boldsymbol{x}}}}}(t)) \, > \, \beta\).
If γ = 1, then \(\sigma (t)=\bar{\sigma },\,\forall t\), so the time-varying coupling strategy simplifies to the constant coupling. Otherwise, the CWN strategy returns a stronger (weaker) coupling strength σ when the transverse reactivity is larger (lower) than the threshold β. If γ = 0, the CWN strategy becomes on-off, similar to the work of refs. 52,53,54,55,56. A comparison between our work and these references is found in Supplementary Note 6, which shows a strong advantage of our CWN approach.
We now discuss the other case of a transition from synchrony to asynchrony (S → A transition), for which the condition for stability of the synchronous solution is that σ < σS→A (the latter is a function of λN). We consider that \(\bar{\sigma }\) is greater than the critical coupling σS→A predicted by the MSF analysis. Hence, the system of our interest in Eq. (5) will not synchronize if \(\sigma (t)=\bar{\sigma }\). Our CWN strategy for the case of an S → A transition is,
where 0 ≤ α ≤ 1 and \({\beta }_{\min } < \, \beta \, < \, {\beta }_{\max }\) are tunable parameters. Similar to the CWN startegy for A → S, α = 0 (α = 1) corresponds to the constant coupling (the on-off coupling.) See Methods “Coupling when needed” for detailed derivations of the CWN strategies for both A → S and S → A transitions.
Supplementary Note 7 shows how this framework can be applied to linear consensus dynamics.
We note here that in the presence of noise or small parametric mismatches, approximate synchronization of the set of Eqs. (1) is still possible, but large desynchronization bursts known as bubbles may occur57. While linear stability analysis does not predict these bubbles, we show in Supplementary Note 8 that the transverse reactivity is able to explain them and that they can be eliminated using our coupling scheme.
Relation to prior results
In this section we briefly summarize a few of the major results from the area of synchronization in time-varying networks in order to place our own results in context. A thorough review of such results can be found in ref. 58. Of primary importance is the MSF: The MSF is the maximum transverse Lyapunov as a function of the coupling strength σ and of the eigenvalues λi of the network Laplacian matrix (often denoted Λmax(σλi)); therefore, it can be used to identify intervals of the coupling strength within which the synchronous solution is asymptotically stable for a given network topology24.
For networks in which the coupling strength varies on a time scale much faster than the node dynamics, the stability of synchronization is determined by the MSF of the average coupling strength \(\bar{\sigma }\) and the eigenvalues of the network Laplacian (i.e., \({\Lambda }_{max}(\bar{\sigma }{\lambda }_{i})\)39. Indeed, this is why in the following we show the synchronization error as a function of the average coupling strength. As the following sections demonstrate, our CWN strategy allows for synchronization to occur for values of \(\bar{\sigma }\) for which it would not be possible with fast switching.
For networks that vary smoothly in time (independent of time scale) in a state-independent way and such that the adjacency matrices commute with each other, the stability of synchronization is determined by the following condition: For each eigenvector of the (time-varying) adjacency matrix associated with perturbations transverse to the synchronization manifold, the associated time averaged maximal Lyapunov exponent of the variational equation must be negative (i.e., \({S}_{i}={\lim }_{T\to \infty }\frac{1}{T}\int_{0}^{T}{\Lambda }_{max}(\sigma (t){\lambda }_{i}(t))dt \, < \, 0\) for all i that correspond to transverse perturbations)59. While this result implies that it may be possible for a network with time-varying coupling strength to synchronize when it would not synchronize with a constant coupling strength of \(\bar{\sigma }\), to our knowledge such a demonstration, even anecdotally, has never been achieved.
In this work, we present the first demonstration that through well-designed time-varying coupling strength synchronization can be obtained over intervals of the average coupling strength that are significantly broader than those predicted by the traditional MSF analysis. Further, we provide a systematic way, based on the transverse reactivity, to achieve this reduction in average coupling strength, leading to substantial gains in the efficiency of synchronization.
Examples
We show the effectiveness of the CWN strategy in Eqs. (7) and (8) through examples with coupled Lorenz oscillators and Rössler oscillators. Other examples of different local dynamics such as the Hindmarsh-Rose neuron model, the FitzHugh-Nagumo neuron model, and the forced Van der Pol oscillator are presented in Supplementary Note 9.
We define the synchronization error,
Here, < ⋅ >t returns the average over the time interval t ∈ [0.9TT], and we set T = 2000 s. The initial conditions for the oscillators are chosen randomly in a small neighborhood of the synchronous solution. For the details of the dynamical function, coupling matrices, and the Laplacian matrix of this example, see Methods “Example details”.
Figure 2 shows the synchronization error for the oscillators when the coupling strategy in Eq. (5) is
-
1.
constant coupling \(\sigma (t)=\bar{\sigma }\)
- 2.

(a) Shows the case of Lorenz systems. The parameters in Eq. (7) for σ = σ(t) are β = 0.5, and γ = 0.16. (b) Shows the case of Rössler oscillators. The parameters for σ = σ(t) in Eqs. (7) and (8) are β = 0.2, and γ = α = 0.01. For \(0\le \bar{\sigma } \, < \, 0.3\), we use Eq. (7), and for \(0.3\le \bar{\sigma }\le 3\), we use Eq. (8). The data for both panels are averaged over 20 realizations initiated from randomly chosen initial conditions. The shaded backgrounds show the standard deviation of the plotted data.
In the case of an A → S transition (S → A transition), σ = σ(t) from Eq. (7) (Eq. (8)) is used. Figure 2a shows the synchronization error E as the average coupling strength \(\bar{\sigma }\) is varied for a network of Lorenz oscillators. Here, we set γ = 0.16 and β = 0.5 in Eq. (7). As an illustrative example, the reactive characterization of the Lorenz attractor with σξ = −1 is provided in Supplementary Fig. 2. For the A → S transition, the coupling is increased when \(r(\bar{{{{\boldsymbol{x}}}}}(t)) \, > \, \beta\).
The time-varying coupling strategy σ(t) successfully synchronizes the network with \(\bar{\sigma }=0.75\) while the constant coupling strategy requires at least \(\bar{\sigma }=1.12\). This corresponds to a 33% reduction of the critical average coupling. The lower panel of Fig. 2a also shows that our proposed strategy corresponds to a substantial reduction in energy expenditure compared to the constant coupling strength case. We conclude that our proposed strategy is capable of achieving both (i) a reduction in the average coupling strength \(\bar{\sigma }\) and (ii) a reduction in the synchronization energy \({{{\mathcal{E}}}}\). See Supplementary Note 11 for an in-depth discussion on the energy efficiency of the strategy and how the energy scales with the average coupling strength \(\bar{\sigma }\) for the case of connected Lorenz oscillators.
We now consider the case of Rössler oscillators coupled in the x variable and study separately the two transitions that are seen as the average coupling strength is increased: the A → S transition followed by the S → A transition. As an illustrative example, the reactive characterization of the Rössler attractor with σξ = −1 is provided in Supplementary Fig. 2. For the A → S (S → A) transition, the coupling is increased (decreased) when \(r(\bar{{{{\boldsymbol{x}}}}}(t)) \, > \, \beta\). In the case of the A → S transition, we set β = 0.2 and γ = 0.01 in Eq. (7) and in the case of the S → A transition, we set β = 0.2 and α = 0.01 in Eq. (8). Figure 2b (top) demonstrates a decrease of about 70% of the critical average coupling when the time-varying coupling strategy is implemented for the A → S transition and an increase of about 70% of the critical average coupling for the S → A transition. Figure 2b (bottom) shows that by the use of time-varying coupling, the synchronization energy \({{{\mathcal{E}}}}\) is also reduced in comparison to constant coupling, which is seen over the entire range of \(\bar{\sigma }\) plotted in the figure. We thus conclude that the time-varying coupling strategies in Eq. (7) and (8) can be implemented successfully to significantly expand the range of the coupling strength in which the network synchronizes and to also reduce the synchronization energy \({{{\mathcal{E}}}}\).
In Supplementary Note 11, we compare the synchronization energy for the case of coupled Lorenz oscillators using the simulation data from Fig. 2a. We did not see a significant difference in the synchronization error when the energy for the constant coupling and the CWN were the same. However, for the same \(\bar{\sigma }\), we saw that both energy and the synchronization error were higher in the case of constant coupling in comparison to the CWN.
We now study the effects of varying the two parameters β and γ in the synchronization strategy of Eq. (7) for the same system of coupled Lorenz oscillators studied in Fig. 2a. The MSF threshold for synchronization is σA→SRe(λ2) ≈ −2.3 as reported in ref. 60. Here, we wish to see how much smaller we can make \(\bar{\sigma }Re({\lambda }_{2})\) than the MSF threshold and still observe synchronization. To this end, we vary γ and β in Eq. (7) and find the smallest
Figure 3 shows the % MSF threshold A → S as γ and β are varied. We see that the switching law in Eq. (7) can successfully synchronize the system for an average value of the coupling as low as 1% of the critical coupling strength corresponding to the MSF threshold.

% MSF threshold as the parameters γ and β in Eq. (7) are varied. The details of these coupled Lorenz systems are presented in Methods”Example details”.
In Supplementary Note 12, we provide a similar example to what shown in Fig. 3 for the CWN strategy for S → A in Eq. (8). This strategy is applied to a network of coupled Lorenz oscillators and it is shown that the % MSF threshold for an S → A transition can be increased up to five folds (530%). This significant increase in the upper bound on \(\bar{\sigma }\) that produces synchronization demonstrates the effectiveness of our proposed strategy in the case of an S → A transition.
As a final numerical example, we demonstrate that the synchronization scheme presented in ref. 48 for the control of extreme events called dragon kings is a special case of our reactivity-based coupling scheme in Supplementary Note 8.
Application to networks of opto-electronic oscillators
We have demonstrated the efficacy of our time-varying coupling scheme in numerical simulations; however, networks in the real world are composed of non-identical oscillators and are subject to noise. Additionally, our coupling scheme relies on a model, which is bound to be imperfect. In this section, we test our reactivity-based coupling scheme on a network of two bi-directionally coupled, chaotic opto-electronic oscillators, and we find that our coupling scheme is robust in an experimental network.
The type of opto-electronic oscillator used here consists of a nonlinear, time-delayed feedback loop. These types of opto-electronic oscillators have found applications in areas such as communications61, microwave waveform generation62,63, and photonic machine learning64. A review of these devices can be found in ref. 65.
A complete description of the opto-electronic oscillator experimental setup and coupling scheme is provided in Supplementary Note 13. A model for the dynamics of our opto-electronic network has been developed in previous work66:
where θ is the low pass filter characteristic time, βfb is the round trip gain, σ is the coupling strength, L is the Laplacian coupling matrix, and ϕ0 = π/4. In this work, Lij = 1 for i ≠ j and Lij = −1 for i = j. While opto-electronic oscillators can display a wide variety of dynamics65,66, we tune our opto-electronic oscillators such that an uncoupled oscillator displays high dimensional chaotic dynamics by selecting βfb = 4.0, τ = 500 μs, and θ = 15.9 μs.
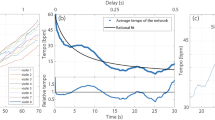
First, to establish a baseline, we keep the coupling strength constant \(\sigma=\bar{\sigma }\) and record the voltage applied to the modulator for each oscillator. The synchronization error between the two oscillators is shown in blue in Fig. 4. Next, we implement the time-varying coupling scheme described in Section “Reactivity-based coupling scheme” with β = 0.34. Although the opto-electronic model in Eq. (10) is not in the standard form as Eq. (1), the dynamics of the transverse perturbations is very similar to the transverse dynamics corresponding to the coupled systems in Eq. (1) (see Supplementary Note 13). The synchronization error with the time-varying coupling scheme is shown in red in Fig. 4. In both cases, the scans over \(\bar{\sigma }\) were performed ten times, and the shaded background shows the standard deviation of the measured synchronization errors. One can see that the minimum \(\bar{\sigma }\) for A → S is reduced from 0.9 to 0.7 (22% reduction) and the maximum \(\bar{\sigma }\) for S → A is increased from 3.2 to 3.5 (8.6% increase.) The results in terms of the energy efficiency are presented in Supplementary Note 13.

The synchronization error E is plotted against the average coupling strength \(\bar{\sigma }\) for the transitions from asynchrony to synchrony in (a) and synchrony to asynchrony in (b). The blue (red) red curves show the constant (time-varying) coupling strategies. The shading shows the standard deviation.
We note that the computation of the reactivity relies on the model (Eq. (10)) and assumes that the oscillators are identical. These experimental results conclusively demonstrate that the time-varying coupling schemes presented in Section “Reactivity-based coupling scheme” are robust to the imperfect model parameter estimations, non-identical oscillators, and noise that are inherently present in this experiment and in all real-world applications, and that our coupling strategy can be successfully applied to time-delayed systems.
Network syncreactivity
An important question is how the particular choice of the network topology affects the reactive characterization of the attractor and what we have discussed so far. We proceed under the assumption that the particular choice of F and H corresponds to a MSF that is negative in an unbounded range of its argument (Class II MSF.) The other case in which the range is bounded (Class III MSF) is discussed in Supplementary Note 14. We now want to compare two different network typologies in terms of the transverse reactivity r(xs), which depends on the parameter p = σξ. However, for a proper comparison, it is required to pick σ such that the long-term stability is the same for both networks. Given two network topologies with Laplacian matrices LA and LB, we fix the coupling strength for each Laplacian matrix such that the long-term stability is the same, that is, \({\sigma }_{A}Re({\lambda }_{2}^{A})={\sigma }_{B}Re({\lambda }_{2}^{B})=a \, < \, 0\), where \(Re({\lambda }_{2}^{A})\) and \(Re({\lambda }_{2}^{B})\) are the real part of the eigenvalue λ2 of the Laplacian matrices LA and LB, respectively. Now, we would like to see if σAξA/σBξB is less, equal, or larger than 1 where ξA (ξB) is the algebraic connectivity of network A (network B), respectively. From Property (ii) for r(xs) in the section “Isolating the dynamics transverse to the synchronous solution,” we know that r(xs) is a non-decreasing function of σξ. Hence, r(xs) is greater for the Laplacian matrix LA than for the Laplacian matrix LB if σAξA > σBξB, or equivalently if the following condition is satisfied, \({\xi }_{A}/Re({\lambda }_{2}^{A}) \, < \, {\xi }_{B}/Re({\lambda }_{2}^{B})\).
With this in mind, we introduce the network syncreactivity index,
Ξ ≥ 0 (see section “Isolating the dynamics transverse to the synchronoussolution”, Property (i)), and note this is purely a topological measure of the network structure and reflects how reactive that network topology is. If a network is connected and normal, then ξ = Re(λ2) and Ξ = 0. Note that normality is only a sufficient condition for Ξ = 0, not a necessary condition. For example, the directed outward star, Network I in Fig. 1b, has a non-normal Laplacian matrix but its index Ξ = 0. We emphasize that the network syncreactivity Ξ is a single parameter of the network topology which is responsible for increasing/decreasing the reactive characterization of the attractor \({{{\mathcal{C}}}}({{{\mathcal{A}}}})\). In particular, if for two networks A and B, ΞA > ΞB, then rA(xs) ≥ rB(xs) for all \({{{{\boldsymbol{x}}}}}_{s}\in {{{\mathcal{A}}}}\).
In Supplementary Note 15, we have investigated the effects of the syncreactivity Ξ over the synchronization dynamics and have seen that networks with higher Ξ are more prone to the occurrence of bubbling57, both in terms of the number of bubbling events and of their size.
Supplementary Note 16 studies the syncreactivity Ξ for two classes of synthetic directed unweighted networks: (i) Erdös-Rényi graphs, and (ii) scale-free graphs. We see that the syncreactivity Ξ has an inverse relationship with the number of nodes, the connectivity probability of Erdös-Rényi networks, and the homogeneity of the degree distribution for scale-free networks.
Effect of syncreactivity index Ξ on the CWN strategy
In this subsection, we compare the performance of the CWN strategy for the cases of two network topologies characterized by different syncreactivity Ξ, namely a directed chain network and a directed star network, with N = 10 nodes. The two 10 × 10 Laplacian matrices for these two networks are,
where the subscript c (s) indicates chain (star.) From the lower triangular structure of the two Laplacian matrices Lc and Ls, we see that their spectrum is the same, i.e., both Laplacian matrices have one 0 eigenvalue and all the other eigenvalues are equal to −1. There is however a difference in the syncreactivity Ξ which results from the difference in the algebraic connectivity ξ. For the chain, ξc = 0.1536 and Ξc = 1.1536 while for the star, ξs = −1 and Ξs = 0. We note that both star and chain topologies have non-normal Laplacian matrices. We use the same Lorenz parameters as in Section “Efficient Synchronization Dynamics”.
Figure 5 shows the % MSF threshold A → S as the parameters β and γ are varied in Eq. (7). Panel a (b) contains the results for the chain (star) network topology. It is clear from the figures that for a fixed pair of the parameters (γ, β), the performance of the CWN strategy is equal or worse for the case of the chain topology. Note that the best possible performance appears to be the same for both coupled systems at 1% of the MSF threshold. The best performance has been achieved for high values of β and low values of γ, which corresponds to an on-off coupling strategy where the switching threshold is a high value of the reactivity of the attractor.

We plot the % MSF threshold as the parameters γ and β in Eq. (7) are varied. The two 10-node network topologies, the chain in (a) and the star in (b), are described by the Laplacian matrices in Eq. (12a), with the same spectrum but with different Ξ. For the chain, Ξc = 1.1536, and for the star, Ξs = 0.
The syncreactivity of real networks
Since the syncreactivity Ξ is a parameter that solely depends on the structure of a network, it is meaningful to study how this varies among different real networks from available data sets. In what follows, for each network, we take the largest strongly connected component (LSCC) and evaluate Ξ for its LSCC. Taking the LSCC of a network ensures that Re(λ2) ≠ 0 which guarantees synchronizability.
Figure 6a plots the syncreactivity Ξ of networks from different domains versus the network size N. We see that on average, neural, trade, biological, and genetics networks are less reactive than social, metabolic, and file-sharing (Gnutella) networks. We also see that most of the more reactive networks have a larger number of nodes. Figure 6b is a plot of the syncreactivity Ξ vs. the density, defined as the number of directed links in the network divided by N2, for the same set of real networks in Fig. 6a. We see that the density correlates well with the syncreactivity, i.e., sparser (denser) networks have higher (lower) syncreactivity Ξ. Figure 6c is a plot of the syncreactivity Ξ vs. the synchronizability index −Re(λ2) (the larger −Re(λ2), the more synchronizable the network) for the same set of real networks in Fig. 6a. Networks that are in the bottom right corner of the plot (e.g., neural) are more synchronizable and less reactive than those in the top left corner (e.g., metabolic) and therefore they are more prone to synchronization both transiently and asymptotically. This is consistent with a conjecture that synchronization has been an evolutionary relevant principle in the formation of neural networks, but not in the formation of social, metabolic, and file-sharing networks67.

The syncreactivity Ξ vs (a) the size of the networks N, (b) the density, and (c) the negative of the real part of the second Laplacian eigenvalue-Re(λ2) for a collection of real-world networks from different domains.
In Supplementary Note 17, we have also plotted Ξ vs an index of non-normality and other measures of synchronizability for directed networks such as the real-part eigenratio Re(λ2)/Re(λN) and the maximum imaginary part \({I}_{\max }\) among all eigenvalues of the Laplacian2,25.
In Supplementary Note 18, further information on the real networks considered can be found. In Supplementary Note 19, we have investigated the effect of the CWN strategy on the settling time of the synchronization dynamics. We have seen that the CWN reduces the settling time down to a small fraction of the settling time obtained with a constant coupling strategy. In Supplementary Note 20 we have considered the case of networks of phase oscillators.
To conclude, our analysis points out that there are at least two different purely topological indices of the ability of a network to synchronize: the synchronizability, characterizing the asymptotic synchronization dynamics, and the syncreactivity, characterizing the transient synchronization dynamics. We argue here that when comparing different networks topologies in terms of their ability to synchronize, both indices should be taken into account.
Discussion
Synchronization is a fundamental physical phenomenon that occurs in networks of coupled technological and biological systems. Much previous work has focused on the asymptotic stability of the synchronous solution, while this paper investigates the transient dynamics and explores the important question of the efficiency of the synchronization dynamics. By combining transient and asymptotic considerations, we achieve an exhaustive characterization of the synchronization dynamics of complex networks. This work advances the area of studies on synchronization of networks in more than one direction, as discussed below.
CWN synchronization strategy
All oscillating systems move through regions of phase space that are different from one another: for example, in certain parts of an oscillation, synchronization may be possible for very little coupling or even for no coupling, while other parts may require strong coupling. While the Lyapunov exponents provide average asymptotic measures of stability for a given attractor, they fail at describing transient dynamical behavior. Our work supersedes the Lyapunov exponents analysis by considering a characterization of the reactivity of different regions of the synchronous attractor. This provides the motivation for exploring new synchronization strategies for which the coupling strength is properly adjusted to different parts of oscillations (regions of the synchronous attractor.) Our main result in this paper is the formulation of a synchronization strategy for networks of coupled oscillators that uses coupling only when needed: e.g., for the case that synchronization requires a large enough coupling strength (A → S transition), the coupling is increased when the transverse reactivity is large, and it is reduced otherwise. We showed the successful application of this strategy in simulations and experiments, and for a variety of different oscillators, including Lorenz, Rössler, the forced Van der Pol, the Hindmarsh-Rose neuron model, the FitzHugh-Nagumo neuron model, and an opto-electronic oscillator experiment, and for different choices of the node-to-node coupling functions. We also showed that CWN provides a rigorous, general foundation for the control of extreme events such as dragon kings, which has previously been thought impossible48. We note that our proposed CWN strategy encompasses the traditional constant coupling and also the largely studied on-off coupling strategy. A gradual shift from the constant coupling strategy to on-off coupling is possible by controlling a scalar parameter between 0 and 1. As a result, the CWN strategy is a powerful and versatile strategy to choose the coupling strength at each time. The choice of the parameters is important in achieving the best efficiency of synchronization which is discussed next.
Efficiency of the synchronization dynamics
A large part of the literature has focused on the conditions to ensure the stability of the synchronized state, while the important issue of the efficiency of the synchronization dynamics has so far received less attention. We investigate the issues of coupling-efficiency and energy-efficiency, which are relevant to both the biological world and technological applications. We propose a synchronization strategy that achieves efficiency by using coupling only when needed. This has immediate benefits in terms of the actuators that can be used to achieve and maintain synchrony. In fact, both technological and biological systems are limited in the duration and overall intensity of the forces that they can exert and benefit from lower energy expenditures. Given the strong advantages we have observed in terms of both average coupling and energy expenditure, it appears likely that coupling and energy-efficient synchronization strategies may be implemented in the biological world.
Enabling synchronization
Another motivation for this study is the observation that in several practical applications, the type of oscillators, the specific choice of the node-to-node coupling function and of the network topology cannot be changed. Hence, it is meaningful to develop strategies to enable synchronization when it would not occur for a given type of oscillators, network topology, and node-to-node coupling. Our proposed synchronization strategy is exceptionally successful at synchronizing networks of coupled oscillators, and it can be used to significantly lower the settling time of the synchronization dynamics. The CWN method is particularly attractive because it enables energy-efficient synchronization such that the attractor of the network of synchronized oscillators is the same as the attractor of a single, uncoupled oscillator. This is in contrast to, e.g., synchronization induced by a common drive (including stochastic synchronization68,69), in which the attractor of the synchronized network is qualitatively different from the attractor of a single, undriven oscillator due to the presence of the drive signal. By using our CWN strategy we were able to show a significant enlargement of the range of the average coupling strength over which synchronization arises. In particular, in the case of an A → S transition (S → A transition) we could significantly reduce (increase) the critical value of the average coupling strength over which synchronization could be established, sometimes by orders of magnitude. For example, in networks of Lorenz oscillators coupled in the second state variable, we achieved synchrony for an average value of the coupling strength as low as 1% of the critical coupling strength predicted by the MSF analysis.
Network syncreactivity
We further introduced a new structural network property that characterizes the transient dynamics of networks towards synchronization, which we call network syncreactivity. Several works have linked the reactivity to the non-normality of the dynamics’ Jacobian. It is known that systems characterized by a non-normal Jacobian are prone to transient effects, which may steer their long-term dynamics away from an equilibrium point, even when this is asymptotically stable31,70,71. For equilibrium points, transient stability can be measured by the reactivity of the fixed point, which is defined as the initial rate of growth of a perturbation about the equilibrium point27,35. Although our work can be applied to both the cases of undirected and directed networks, it is particularly relevant to the latter, as these may have nonzero syncreactivity. We have found that the overall propensity of a network to synchronize can be fully described in terms of two topological scalar indices, synchronizability, and syncreactivity. An analysis of real complex networks from several domains has shown that typically neural networks have better transient and asymptotic synchronization properties than social, metabolic, and file-sharing networks. This is consistent with different evolutionary principles guiding the formation of networks from different domains. We have also identified the density of connections to be a network topological property that well correlates with the syncreactivity while being distinct from previously introduced topological correlates31,35.
Limitations and future directions
A limitation of our proposed CWN strategy is that the selection of the parameters β and γ requires ad-hoc tuning. While optimization of these parameters can be nontrivial, in practice the CWN strategy is advantageous even when the parameters are not optimized. This is shown in Fig. 3, where all the points correspond to an improvement in the threshold for synchronization, varying from a minimum of zero (dark red region) to 100 folds (dark blue region.) An important point of this paper is the connection between reactivity and the largest Lyapunov exponent of a system, where the former (the latter) measures the instantaneous (asymptotic) rate of growth of the state vector. Another related concept that we think deserves further investigation in relation to both reactivity and Lyapunov exponents is that of contraction72. Another point that is left for future investigation is the existence of a limit on how little average coupling can be spent and still achieve synchronization. For example, for the case of Lorenz systems presented in Fig. 3, the smallest average coupling needed for synchronization seems to be close to 1% of the amount needed for constant coupling. In order to characterize this limit, one would need to formulate a separate optimization problem for which the goal is to minimize the average coupling expenditure.
Methods
Isolating the dynamics transverse to the synchronous solution
In order to study the stability of the dynamics of Eqs. (1) about the synchronous solution s(t), we linearized (1) about s(t), thus obtaining,
i = 1, …N, where δxi(t) = xi(t) − s(t) is a small perturbation and DF(s(t)) is the Jacobian evaluated at the synchronous solution at time t. Equation (13) is rewritten in the compact form as
where the nN-dimensional vector \({\delta {{{\boldsymbol{X}}}}}^{\top }=[\delta {{{{\boldsymbol{x}}}}}_{1}^{\top },\delta {{{{\boldsymbol{x}}}}}_{2}^{\top },\ldots,\delta {{{{\boldsymbol{x}}}}}_{N}^{\top }]\), IN is the N-dimensional identity matrix, and ⊗ denotes the Kronecker product. The first challenge, which does not arise in the study of equilibrium points, is that of decoupling the synchronous “parallel” motion from the “transverse” motion.
The variational system (14) has a “parallel dynamics” along the direction spanned by the eigenvector \({[{\sqrt{N}}^{-1},{\sqrt{N}}^{-1},\ldots,{\sqrt{N}}^{-1}]}^{\top }\) corresponding to the only zero eigenvalue λ1 = 0 and a “transverse dynamics” in the subspace orthogonal to this eigenvector. We are especially interested in characterizing the transverse dynamics. In order to isolate this transverse dynamics, we construct an orthogonal matrix \(\tilde{V}\) having its first column equal to the vector \({[{\sqrt{N}}^{-1},{\sqrt{N}}^{-1},\ldots,{\sqrt{N}}^{-1}]}^{\top }\). This can be done, for example, by using the Gram-Schmidt method. Then, we consider the similarity transformation \(\tilde{L}={\tilde{V}}^{\top }L\tilde{V}\). In the general case in which the matrix L is not symmetric, the matrix \(\tilde{L}\) has the following structure,

where we call the (N − 1)-dimensional block in the right-lower corner the reduced matrix L⊥. Alternatively, one can retrieve L⊥ by first removing the first column of the matrix \(\tilde{V}\) to obtain V and then
Note that by construction the matrix L⊥ has all negative real-part eigenvalues. Applying the transformation \(\tilde{V}\), we can then write down the equation for the time evolutions of the transverse motions corresponding to Eq. (14),
We define the transverse reactivity of the perturbations about xs on the synchronous solution
We remark that the transverse reactivity r(xs) determines the reactivity associated with Eq. (16) at a particular point xs on the synchronous solution. If r(xs > 0 (r(xs) < 0), then the norm of transverse perturbations \(\parallel \! \! \delta \hat{{{{\boldsymbol{X}}}}} \! \! \parallel\) can (cannot) increase instantaneously.
We remark that through Eq. (3), the transverse reactivity depends on the parameter p = σξ, where σ ≥ 0 is the coupling strength and ξ is the algebraic connectivity.
In what follows, we will simplify Eq. (17) to obtain Eq. (3). We write down the eigenvalue equation for the symmetric matrix \({S}_{{L}^{\perp }}=({L}^{\perp }+{{L}^{\perp }}^{\top })/2\), \({S}_{{L}^{\perp }}{V}_{S}={V}_{S}Y\), where the columns of the orthogonal matrix VS are the eigenvectors of the matrix \({S}_{{L}^{\perp }}\) and the matrix Y is diagonal with the elements on the main diagonal equal to the eigenvalues of \({S}_{{L}^{\perp }}\). The largest eigenvalue of the symmetric matrix \({S}_{{L}^{\perp }}\) is often referred to as the algebraic connectivity, and here, we denote it as \(\xi={e}_{1}({S}_{{L}^{\perp }})\). Then, we can rewrite r(xs) by pre-multiplying and post-multiplying Eq. (17) by \({V}_{S}^{\top }\otimes I\) and VS ⊗ I, respectively, yielding,
Because the matrix Y is diagonal, then
From Eq. (19), we also see that there are two distinct effects on the overall transverse reactivity, a baseline effect of the individual dynamics given by [DF(xs) + DF⊤(xs)]/2 and an effect of the network topology given by Yii. The baseline effect depends on the particular choice of the function F so that different choices of oscillators result in different baseline effects. In what follows we are particularly interested in the role of the network topology, so we focus on the largest eigenvalue of \({S}_{{L}^{\perp }}\).
Also, under the generic assumption that the matrices have simple spectra, one can show that (see ref. 73 (Chapter 1.3.4) and ref. 74)
where π is the Perron-Frobenius eigenvector (with entries all of the same sign) of the symmetric matrix [DF(xs) + DF⊤(xs)]/2 + σYiiH. We thus expect the maximum in Eq. (19) to be always achieved for i = i* corresponding to the algebraic connectivity ξ. Then, Eq. (17) for the reactivity of the transverse motion is rewritten as
which is the same as Eq. (3).
Next, we present some properties of the algebraic connectivity ξ and of the transverse reactivity r(xs):
-
(i)
ξ ≥ Re(λ2), i.e., the algebraic connectivity ξ is always greater than or equal to the real part of the second smallest eigenvalue of the Laplacian, Re(λ2).
-
(ii)
For each point xs, the transverse reactivity r(xs) (and so the reactive characterization of the attractor) is a continuous monotonically non-decreasing function of the parameter p = σξ.
-
(iii)
The transverse reactivity r(xs) is a continuous function of the synchronous solution s(t) if the Jacobian DF is a continuous function of the synchronous solution.
These properties are proved in the following sections of the “Methods”. From Property (ii) it follows that the transverse reactivity is a continuous monotonically non-decreasing function of ξ for a fixed σ. For a fixed ξ > 0 (ξ < 0), the transverse reactivity is a continuous monotonically non-decreasing (non-increasing) function of σ.
Based on Property (iii), we can divide the attractor \({{{\mathcal{A}}}}\) into two distinct regions:
-
1.
The reactive region \({{{\mathcal{R}}}}=\{{{{{\boldsymbol{x}}}}}_{s}| r({{{{\boldsymbol{x}}}}}_{s}) \, > \, 0,\,{{{{\boldsymbol{x}}}}}_{s}\in {{{\mathcal{A}}}}\}\), and
-
2.
The non-reactive region \({{{\mathcal{N}}}}=\{{{{{\boldsymbol{x}}}}}_{s}| r({{{{\boldsymbol{x}}}}}_{s})\le 0,\,{{{{\boldsymbol{x}}}}}_{s}\in {{{\mathcal{A}}}}\}\),
where \({{{\mathcal{R}}}}\bigcap {{{\mathcal{N}}}}={{\emptyset}}\), \({{{\mathcal{R}}}}\bigcup {{{\mathcal{N}}}}={{{\mathcal{A}}}}\).
We note that for a given choice of the function F, the reactivity of these regions is a function of the coupling strength σ, of the algebraic connectivity ξ, and the node-to-node coupling matrix H. Thus if any of the aforementioned parameters change while the local dynamics F is fixed, the reactive and non-reactive regions change too. The ratio between the size of \({{{\mathcal{R}}}}\) and the size of \({{{\mathcal{A}}}}\) defines the critical probability μ of observing an increase in the norm of the transverse perturbation at the initial time. For detailed definition of the critical probability μ, see Methods “Worst-case probability”.
Coupling when needed
We aim to find a time-varying coupling strength σ(t) such that (a) the average coupling strength is
where T is the total time, and (b) the coupled dynamical systems in Eq. (5) synchronize. We propose the following simple strategy which we call “coupling when needed” (CWN),
where \(\bar{{{{\boldsymbol{x}}}}}(t)=\frac{1}{N}{\sum }_{i=1}^{N}{{{{\boldsymbol{x}}}}}_{i}(t)\) is the average solution at time t, \({\beta }_{\min } \, < \, \beta \, < \, {\beta }_{\max }\) is a tunable parameter, between \({\beta }_{\min }=\mathop{\min }_{{{{{\boldsymbol{x}}}}}_{s}\in {{{\mathcal{A}}}}}r({{{{\boldsymbol{x}}}}}_{s})\) and \({\beta }_{\max }={\max }_{{{{{\boldsymbol{x}}}}}_{s}\in {{{\mathcal{A}}}}}r({{{{\boldsymbol{x}}}}}_{s})\), and
Here, ξ is the previously introduced algebraic connectivity of the Laplacian L. We proceed to find σ1 and σ2 such that \({\sigma }_{1}\ge \bar{\sigma }\ge {\sigma }_{2}\ge 0\) and Eq. (20) is satisfied.
Without loss of generality, we can set \({\sigma }_{1}=\bar{\sigma }/\alpha\) and \({\sigma }_{2}=\bar{\sigma }\gamma\) where 0 < α ≤ 1 and 0 ≤ γ ≤ 1. By enforcing the constraint in Eq. (20), we get
Here, the parameter 0 < τ < 1 is the fraction of the times when \(r(\bar{{{{\boldsymbol{x}}}}}(t)) \, > \, \beta\) and is a function of β. After simplifications, we obtain 1/α = (1 − γ(1 − τ))/τ. Thus, Eq. (21) is rewritten as
where γ and β are tunable parameters such that 0 ≤ γ ≤ 1 and \({\beta }_{\min } \, < \, \beta \, < \, {\beta }_{\max }\). If γ = 1, then \(\sigma (t)=\bar{\sigma },\,\forall t\), so the time-varying coupling strategy simplifies to the constant coupling. If γ = 0 our strategy becomes on-off, similar to the work of refs. 52,53,54,55,56. A good approximation for τ may be calculated beforehand using a long enough pre-recorded synchronous solution s(t), Eq. (2), as
As long as the initial conditions of the connected systems are close to the synchronous solution, the above approximation of τ is sufficiently close to the actual probability that \(r(\bar{{{{\boldsymbol{x}}}}}(t)) \, > \, \beta\).
We now focus on the other case of a transition from synchrony to asynchrony (S → A transition), for which the condition for stability of the synchronous solution is that σ < σS→A (the latter is a function of λN). We consider that \(\bar{\sigma }\) is greater than the critical coupling σS→A predicted by the MSF analysis. Hence, the system of our interest in Eq. (5) will not synchronize if \(\sigma (t)=\bar{\sigma }\).
To synchronize the system under a state-dependent coupling strategy with an average value of \(\bar{\sigma }\), we use the same coupling strategy in Eq. (21) but for this case, we set \(0\le {\sigma }_{1}\le \bar{\sigma }\le {\sigma }_{2}\). Without loss of generality, we can take \({\sigma }_{1}=\bar{\sigma }\alpha\) and \({\sigma }_{2}=\bar{\sigma }/\gamma\) where 0 ≤ α ≤ 1 and 0 < γ ≤ 1 are tunable parameters. After enforcing the constraint in Eq. (20), we obtain 1/γ = (1 − τα)/(1 − τ), where τ is the fraction of the times when \(r(\bar{{{{\boldsymbol{x}}}}}(t)) \, > \, \beta\), as before. Therefore, our CWN strategy for the case of an S → A transition is,
where 0 ≤ α ≤ 1 and \({\beta }_{\min } \, < \, \beta \, < \, {\beta }_{\max }\) are tunable parameters.
Example details
The local dynamics F and the coupling matrix H for the case of Lorenz are
which results in an unbounded range of the coupling strength for synchronization. For the case of the Rössler oscillator, we set
which results in a bounded range of the coupling strength that produces synchronization. We construct a directed unweighted graph, with Laplacian
Proof of property (i)
Property (i) follows from the fact that the largest eigenvalue of the symmetric part of a matrix is always greater than or equal to the largest real part eigenvalue of that matrix; therefore ξ ≥ Re(λ2). The inequality is satisfied with the equal sign, i.e., ξ = Re(λ2), whenever the left and the right eigenvectors of L⊥ associated with the eigenvalue λ2 are real and coincide. The proof is complete.
Proof of property (ii)
We fix a point on the synchronous solution, xs ∈ {s(t)}. Then, for an assigned Jacobian DF(xs) and coupling matrix H, we look at the effects of varying σξ on the eigenvalues of the matrix
As σξ changes continuously, the entries of the matrix M vary continuously as well. It is well known that the eigenvalues of a matrix vary continuously with the entries of the matrix. Therefore, r(xs) varies continuously with σξ. Also, under the generic assumption that the matrices have simple spectra, one can show that (see ref. 73 (Chapter 1.3.4))
where π is the Perron-Frobenius eigenvector (with entries all of the same sign) of the symmetric matrix M. Hence, r(xs) is a continuous monotonically non-decreasing function of σξ. The proof is complete.
Proof of property (iii)
Consider the matrix
for a point on the attractor, \({{{{\boldsymbol{x}}}}}_{s}\in {{{\mathcal{A}}}}\). If we assume that DF(xs) is a continuous function of xs, it follows the entries of M are a continuous function of xs. Also, it is known that the eigenvalues of a matrix are continuous functions of the entries of that matrix. Thus, we conclude the transverse reactivity r(xs) = e1(M) is a continuous function of xs. The proof is complete.
Worst-case probability
Here we define the “worst-case” probability of observing an increase in the norm of the transverse perturbation at initial times by randomly selecting a point xs from the attractor:
Here, sign ( ⋅ ) is the sign function and \( < \cdot {\ > \ }_{{{{\mathcal{A}}}}}\) indicates an average over the attractor \({{{\mathcal{A}}}}\). The quantity 0 ≤ μ ≤ 1 measures the fraction of the points on the attractor that result in r(xs) > 0 for some values of σ and ξ. The term “worst-case” refers to the worst possible choice of the initial condition \(\delta \hat{{{{\boldsymbol{X}}}}}(0)\) for Eq. (16), which is a scalar multiple of the eigenvector corresponding to the largest eigenvalue of the matrix \((\hat{Z}({{{{\boldsymbol{x}}}}}_{s})+\hat{Z}{({{{{\boldsymbol{x}}}}}_{s})}^{\top })/2\). However, if \(\delta \hat{{{{\boldsymbol{X}}}}}(0)\) is chosen randomly, the initial condition will have a nonzero component along this eigenvector with probability one. Hence, by defining μ as above, we now can provide a probability that an increase in \(\parallel \! \! \delta \hat{{{{\boldsymbol{X}}}}}(t) \! \! \parallel\) will be typically seen at the initial time.
Proposition 1
The worst-case probability μ is a monotonically non-decreasing function of p = σξ.
Proof
Since μ is a non-decreasing continuous function of r(xs) and r(xs) is a non-decreasing continuous function of p = σξ, we conclude μ is a non-decreasing continuous function of p. The proof is complete.
Following the same steps in the subsection “Network Syncreactivity”, it follows from Proposition 1 that for two networks A and B, if the syncreactivity ΞA > ΞB, then the critical probability μA ≥ μB.
Reporting summary
Further information on research design is available in the Nature Portfolio Reporting Summary linked to this article.
Data availability
All data generated or analyzed during this study are included in this published article (and its Supplementary Information files).
Code availability
The source code for the numerical simulations presented in the paper will be made available upon request, as the code is not required to support the main results reported in the manuscript.
References
Arenas, A., Díaz-Guilera, A., Kurths, J., Moreno, Y. & Zhou, C. Synchronization in complex networks. Physi. Rep. 469, 93–153 (2008).
Boccaletti, S., Latora, V., Moreno, Y., Chavez, M. & Hwang, D. U. Complex networks: structure and dynamics. Phys. Rep. 424, 175–308 (2006).
Wu, C. W. Synchronization in Complex Networks of Nonlinear Dynamical Systems (World Scientific, 2007).
Suykens, J. A. & Osipov, G. V. Introduction to focus issue: synchronization in complex networks. Chaos 18, 037101 (2008).
Locatelli, N. et al. Efficient synchronization of dipolarly coupled vortex-based spin transfer nano-oscillators. Sci. Rep. 5, 17039 (2015).
Moujahid, A., d’Anjou, A., Torrealdea, F. & Torrealdea, F. Efficient synchronization of structurally adaptive coupled hindmarsh–rose neurons. Chaos Solitons Fractals 44, 929–933 (2011).
Zhang, D., Cao, Y., Ouyang, Q. & Tu, Y. The energy cost and optimal design for synchronization of coupled molecular oscillators. Nat. Phys. 16, 95–100 (2020).
Urazhdin, S., Tabor, P., Tiberkevich, V. & Slavin, A. Fractional synchronization of spin-torque nano-oscillators. Phys. Rev. Lett. 105, 104101 (2010).
Murali, K. & Lakshmanan, M. Transmission of signals by synchronization in a chaotic van der pol–duffing oscillator. Phys. Review E 48, R1624 (1993).
Demidov, V. et al. Synchronization of spin hall nano-oscillators to external microwave signals. Nat. Commun. 5, 3179 (2014).
Izhikevich, E. M. Dynamical Systems in Neuroscience (MIT Press, 2007).
McCrea, M., Ermentrout, B. & Rubin, J. E. A model for the collective synchronization of flashing in photinus carolinus. J. R. Soc. Int. 19, 20220439 (2022).
Ramírez-Ávila, G. M., Kurths, J., Depickere, S. & Deneubourg, J.-L. Modeling fireflies synchronization. A Mathematical Modeling Approach from Nonlinear Dynamics to Complex Systems 131–156 (Springer International Publishing, 2018).
Verkerk, A. O. et al. Single cells isolated from human sinoatrial node: action potentials and numerical reconstruction of pacemaker current. In Proc. 2007 29th Annual international conference of the IEEE Engineering in Medicine and Biology Society, 904–907 (IEEE, 2007).
Dokos, S., Celler, B. & Lovell, N. Ion currents underlying sinoatrial node pacemaker activity: a new single cell mathematical model. J. Theor. Biol. 181, 245–272 (1996).
Kuramoto, Y. International symposium on mathematical problems in theoretical physics. Lecture Notes Phys. 30, 420 (1975).
Kuramoto, Y. & Kuramoto, Y. Chemical Turbulence (Springer, 1984).
Sepulchre, R., Paley, D. & Leonard, N. Collective motion and oscillator synchronization. In Proc. Cooperative Control: a Post-Workshop Volume 2003 Block Island Workshop on Cooperative Control 189–205 (Springer, 2005).
Ha, S.-Y., Ha, T. & Kim, J.-H. On the complete synchronization of the kuramoto phase model. Phys. D Nonlinear Phenom. 239, 1692–1700 (2010).
Brown, E., Moehlis, J. & Holmes, P. On the phase reduction and response dynamics of neural oscillator populations. Neural Comput.16, 673–715 (2004).
Wilson, D. & Moehlis, J. Isostable reduction of periodic orbits. Phys. Rev. E 94, 052213 (2016).
Wilson, D. Phase-amplitude reduction far beyond the weakly perturbed paradigm. Phys. Rev. E 101, 022220 (2020).
Strogatz, S. Sync: The Emerging Science of Spontaneous Order (Hyperion. New York, 2003).
Pecora, L. & Carroll, T. Master stability functions for synchronized coupled systems. Phys. Rev. Lett. 80, 2109–2112 (1998).
Barahona, M. & Pecora, L. Synchronization in small-world networks. Phys. Rev. Lett. 89, 054101 (2002).
Farrell, B. F. & Ioannou, P. J. Generalized stability theory. part I: autonomous operators. J. Atmos. Sci. 53, 2025 – 2040 (1996).
Neubert, M. G. & Caswell, H. Alternatives to resilience for measuring the responses of ecological systems to perturbations. Ecology 78, 653–665 (1997).
Hennequin, G., Vogels, T. P. & Gerstner, W. Non-normal amplification in random balanced neuronal networks. Phys. Rev. E 86, 011909 (2012).
Tang, S. & Allesina, S. Reactivity and stability of large ecosystems. Front. Ecol. Evol. 2, 21(2014).
Biancalani, T., Jafarpour, F. & Goldenfeld, N. Giant amplification of noise in fluctuation-induced pattern formation. Phys. Rev. Lett. 118, 018101 (2017).
Asllani, M., Lambiotte, R. & Carletti, T. Structure and dynamical behavior of non-normal networks. Sci. Adv. 4, eaau9403 (2018).
Muolo, R., Asllani, M., Fanelli, D., Maini, P. K. & Carletti, T. Patterns of non-normality in networked systems. J. Theor. Biol. 480, 81–91 (2019).
Gudowska-Nowak, E., Nowak, M. A., Chialvo, D. R., Ochab, J. K. & Tarnowski, W. From synaptic interactions to collective dynamics in random neuronal networks models: critical role of eigenvectors and transient behavior. Neural Comput. 32, 395–423 (2020).
Lindmark, G. & Altafini, C. Centrality measures and the role of non-normality for network control energy reduction. IEEE Control Syst. Lett. 5, 1013–1018 (2021).
Duan, C., Nishikawa, T., Eroglu, D. & Motter, A. E. Network structural origin of instabilities in large complex systems. Sci. Adv. 8, eabm8310 (2022).
Nazerian, A., Phillips, D., Makse, H. A. & Sorrentino, F. Single-integrator consensus dynamics over minimally reactive networks. IEEE Control Syst. Lett. 7, 2437–2442 (2023).
Nazerian, A., Phillips, D., Frasca, M. & Sorrentino, F. The reactability of discrete time systems. IEEE Control Syst. Lett. 7, 3657–3662 (2023).
Pikovsky, A. & Politi, A. Lyapunov Exponents: a Tool to Explore Complex Dynamics (Cambridge University Press, 2016).
Stilwell, D. J., Bollt, E. M. & Roberson, D. G. Sufficient conditions for fast switching synchronization in time-varying network topologies. SIAM J. Appl. Dyn. Syst. 5, 140–156 (2006).
Olfati-Saber, R. & Murray, R. Consensus problems in networks of agents with switching topology and time-delays. IEEE Trans. Autom. Control 49, 1520–1533 (2004).
Olfati-Saber, R., Fax, A. & Murray, R. M. Consensus and cooperation in networked multi-agent systems. Proc. IEEE 95, 215–233 (2007).
Miao, Z., Wang, Y. & Fierro, R. Collision-free consensus in multi-agent networks: a monotone systems perspective. Automatica 64, 217–225 (2016).
Liu, X., Chen, T. & Lu, W. Consensus problem in directed networks of multi-agents via nonlinear protocols. Phys. Lett. A 373, 3122–3127 (2009).
Liu, Y.-Y., Slotine, J.-J. & Barabási, A.-L. Controllability of complex networks. Nature 473, 167–173 (2011).
Yan, G. et al. Spectrum of controlling and observing complex networks. Nat. Phys. 11, 779–786 (2015).
Sorrentino, F., di Bernardo, M., Garofalo, F. & Chen, G. Controllability of complex networks via pinning. Phys. Rev. E 75, 046103 (2007).
Panahi, S., Lodi, M., Storace, M. & Sorrentino, F. Pinning control of networks: dimensionality reduction through simultaneous block-diagonalization of matrices. Chaos 32, 113111 (2022).
de S. Cavalcante, H. L. D., Oriá, M., Sornette, D., Ott, E. & Gauthier, D. J. Predictability and suppression of extreme events in a chaotic system. Phys. Rev. Lett. 111, 198701 (2013).
Wu, C. W. Algebraic connectivity of directed graphs. Linear Multilinear Algebra 53, 203–223 (2005).
Fiedler, M. Algebraic connectivity of graphs. Czechoslov. Math. J. 23, 298–305 (1973).
Rihaczek, A. Signal energy distribution in time and frequency. IEEE Trans. Inform. Theory 14, 369–374 (1968).
Belykh, I. V., Belykh, V. N. & Hasler, M. Blinking model and synchronization in small-world networks with a time-varying coupling. Phys. D Nonlinear Phenom. 195, 188–206 (2004).
So, P., Cotton, B. C. & Barreto, E. Synchronization in interacting populations of heterogeneous oscillators with time-varying coupling. Chaos 18, 037114 (2008).
Chen, F., Chen, Z., Xiang, L., Liu, Z. & Yuan, Z. Reaching a consensus via pinning control. Automatica 45, 1215–1220 (2009).
Buscarino, A., Frasca, M., Branciforte, M., Fortuna, L. & Sprott, J. C. Synchronization of two rössler systems with switching coupling. Nonlinear Dyn. 88, 673–683 (2017).
Parastesh, F. et al. Synchronizability of two neurons with switching in the coupling. Appl. Math. Comput. 350, 217–223 (2019).
Ashwin, P., Buescu, J. & Stewart, I. Bubbling of attractors and synchronisation of chaotic oscillators. Phys. Lett. A 193, 126–139 (1994).
Ghosh, D. et al. The synchronized dynamics of time-varying networks. Phys. Rep. 949, 1–63 (2022).
Boccaletti, S. et al. Synchronization in dynamical networks: evolution along commutative graphs. Phys. Rev. E Stat. Nonlinear Soft Matt. Phys. 74, 016102 (2006).
Huang, L., Chen, Q., Lai, Y.-C. & Pecora, L. M. Generic behavior of master-stability functions in coupled nonlinear dynamical systems. Phys. Rev. E 80, 036204 (2009).
Argyris, A. et al. Chaos-based communications at high bit rates using commercial fibre-optic links. Nature 438, 343–346 (2005).
Maleki, L. The optoelectronic oscillator. Nat. Photon. 5, 728–730 (2011).
Hao, T. et al. Breaking the limitation of mode building time in an optoelectronic oscillator. Nat. Commun. 9, 1839 (2018).
Larger, L. et al. Photonic information processing beyond turing: an optoelectronic implementation of reservoir computing. Opt. Exp. 20, 3241–3249 (2012).
Chembo, Y. K., Brunner, D., Jacquot, M. & Larger, L. Optoelectronic oscillators with time-delayed feedback. Rev. Mod. Phys. 91, 035006 (2019).
Murphy, T. E. et al. Complex dynamics and synchronization of delayed-feedback nonlinear oscillators. Phil. Trans. R. Soc. A 368, 343–366 (2010).
Montgomery, R. & Montgomery, M. D. Evolutionary origins and functional diversity of neural synchronization and desynchronization: a multidisciplinary perspective. ResearchGate preprint RG.2.2.12019.71203 (2023).
Pikovsky, A. S. Statistics of trajectory separation in noisy dynamical systems. Phys. Lett. A 165, 33–36 (1992).
Herzel, H. & Freund, J. Chaos, noise, and synchronization reconsidered. Phys. Rev. E 52, 3238 (1995).
Trefethen, L. N., Trefethen, A. E., Reddy, S. C. & Driscoll, T. A. Hydrodynamic stability without eigenvalues. Science 261, 578–584 (1993).
Asllani, M. & Carletti, T. Topological resilience in non-normal networked systems. Phys. Rev. E 97, 042302 (2018).
Lohmiller, W. & Slotine, J.-J. E. On contraction analysis for non-linear systems. Automatica 34, 683–696 (1998).
Tao, T. Topics in Random Matrix Theory Vol. 132 (American Mathematical Society, 2012).
Horn, R. A., Rhee, N. H. & Wasin, S. Eigenvalue inequalities and equalities. Linear Algebra Appl. 270, 29–44 (1998).
Acknowledgements
We acknowledge support from grants AFOSR FA9550-24-1-0214 and Oak Ridge National Laboratory 006321-00001A. The authors are grateful to Chad Nathe for the work he performed on an early version of this paper and to Marco Storace for the thorough and generous feedback he has provided on this paper.
Author information
Authors and Affiliations
Contributions
Amirhossein Nazerian worked on the theory and numerical simulations. Joe Hart worked on the experimental system, as well as on some aspects of the theory. Matteo Lodi worked on the simulations and the figures. Francesco Sorrentino worked on the theory and supervised the research. All authors contributed to writing the paper.
Corresponding author
Ethics declarations
Competing interests
The authors declare no competing interests
Peer review
Peer review information
Nature Communications thanks Vito Latora, who co-reviewed with Luca Gallo, and the other, anonymous, reviewer(s) for their contribution to the peer review of this work. A peer review file is available.
Additional information
Publisher’s note Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Supplementary information
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution-NonCommercial-NoDerivatives 4.0 International License, which permits any non-commercial use, sharing, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if you modified the licensed material. You do not have permission under this licence to share adapted material derived from this article or parts of it. The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by-nc-nd/4.0/.
About this article

Cite this article
Nazerian, A., Hart, J.D., Lodi, M. et al. The efficiency of synchronization dynamics and the role of network syncreactivity. Nat Commun 15, 9003 (2024). https://doi.org/10.1038/s41467-024-52486-0
Received:
Accepted:
Published:
Version of record:
DOI: https://doi.org/10.1038/s41467-024-52486-0
This article is cited by
-
Distributed observer-based practical prescribed-time formation tracking control of nonholonomic mobile robots under position and orientation disturbances
Nonlinear Dynamics (2026)
-
Global synchronization in Matrix-Weighted networks
Communications Physics (2025)
-
Bursting dynamics and synchronization of neuromorphic systems with VO2 memristors and Josephson junctions
Nonlinear Dynamics (2025)
