
Abstract
Chang’E-6 mission successfully achieved humanity’s first sample return from the farside of the Moon. Here, we report a high-precision terrain dataset with millimeter-to-decimeter spatial resolution around the CE-6 landing site. Based on this dataset, the accurate location of the landing site is determined to be (153.9776° W, 41.6251° S, -5273 m), and a micro-scale geological analysis of the landing area is conducted. Comparative analysis suggests that the surface exposure time of Chang’ E-6 landing area is likely between that of Chang’E-4 and Chang’E-5 landing areas. Studies of the ejecta thickness from possible craters in mare and non-mare areas indicate that Chang’E-6 samples may contain materials from diverse provenances. Detailed topographic analysis reveals that the Chang’E-6 landing area is primarily covered by local mare materials, which were excavated from a nearby unnamed crater with a diameter of ~ 51 m and account for 30%–35% in volume.
Similar content being viewed by others


Introduction
At 06:24 on June 2, 2024 (Beijing time), the Chang’E-6 (CE-6) lander and ascender composite, part of humanity’s first mission to return samples from the farside of the Moon, successfully landed in the northeastern part of the South Pole-Aitken Basin (SPA), within the mare basalt region between the southern rim crest and peak rim of the Apollo Basin. It successfully returned a total of 1935.3 grams of lunar samples. Laboratory studies of the CE-6 lunar samples can accurately determine the samples’ mineral composition, formation age, etc. Lunar researchers are eager for the laboratory results of CE-6 samples to provide crucial evidence for important scientific issues, such as magma activity on the farside of the Moon and the dichotomy between the near and far sides1. The latest laboratory research results of CE-6 samples indicate that the soil is a mixture of local basalts and non-basaltic ejecta. It contains diverse lithic fragments, including local mare basalt, breccia, agglutinate, glasses and leucocrate2. The majority of CE-6 basalt fragments have a consistent formation age of ~2.8 Ga3,4.
To better constrain how the CE-6 samples’ material composition and mineral content relate to their geological origin and subsequent evolutionary history, it is essential to gain a thorough understanding of critical information such as the detailed surface landforms and geological characteristics of the landing area. These include surface roughness, depth-to-diameter ratio of fresh craters, regolith thickness, rock abundance, as well as material provenances of CE-6 samples. Previous studies of the geological context of the CE-6 landing area are primarily based on remote sensing data at scales of kilometers to hundreds of kilometers. It is believed that the CE-6 landing area is located within a young lunar mare basalt geological unit with an age estimated to be 2.4 Ga–3.1 Ga5,6,7,8,9, possibly mixed with non-mare ejecta materials from foreign provenances, such as Apollo basin wall and rim, Chaffee S, and White craters9,10,11,12, as well as Vavilov crater7,9,13. However, due to the uncertainty of the landing site location prior to the mission and the lack of high-precision detection data, very little is known about the geological context information in the vicinity of the CE-6 landing site at scales of kilometers, sub-kilometers, or even smaller.
The CE-6 mission has obtained high-precision in situ exploration data such as imagery, spectral data, and radar data near the landing site. Research leveraging these data can furnish more accurate information on the geo-positioning of the lander and geomorphology of the landing site. It aids in accurately determining the geographical location of the CE-6 landing site, as well as establishing a correlation between the laboratory analysis outcomes of the lunar samples and the combined remote sensing and in situ detection data of the landing area. Moreover, it enables a micro-scale understanding of the geological context of the CE-6 landing area, with a spatial resolution spanning from millimeters to sub-kilometers. Among the scientific payloads onboard the CE-6 probe, the landing camera (LCAM) and panoramic camera (PCAM) (detailed in the Methods section) captured images with varying coverage, viewing angles, and spatial resolutions during the landing and surface exploration phase, providing essential data for reconstructing a detailed terrain dataset of the landing area.
In this work, the Chang’E-2 (CE-2) global lunar topography data (CE2TMap201514,15) with a spatial resolution of 7 m is selected as the reference base map, and a high-precision terrain dataset of the CE-6 landing area with a unified spatial reference frame and projection coordinate system is produced. On this basis, the exact locations of the CE-6 landing site, the scoop sampling areas, and the drilling sampling point are accurately determined. Micro-scale topographic analysis near the landing site is conducted, to identify and extract craters and rocks, and to analyze geological characteristics such as surface roughness, depth-to-diameter ratio of fresh craters, regolith thickness, and rock abundance. Additionally, a comparative analysis is conducted with the landing areas of Chang’E-4 (CE-4) and Chang’E-5 (CE-5), and the exposure time of the CE-6 landing area is discussed, together with the potential provenances of ejecta on the landing area.
Results
High-precision positioning of the CE-6 landing site
Accurate knowledge of the CE-6 landing site coordinates is essential for placing lunar surface in situ scientific observations and returned samples into their proper geological and geophysical context16,17. In this work, a total of 142 LCAM sequence images and 120 pairs of PCAM stereo images are selected to reconstruct the CE-6 landing area terrain data based on photogrammetric principles with spatial resolution ranging from millimeter to decimeter, including digital orthophoto maps (DOMs) and digital elevation models (DEMs) denoted as CE6_LCAM_DOM, CE6_PCAM_DOM, CE6_LCAM_DEM, and CE6_PCAM_DEM, respectively (Fig. 1, see the Methods section for details).

a A planar location diagram with some key landmarks related to the lander and in situ exploration, north is up; b a 3D rendering diagram corresponding to the planar map.
Based on this terrain dataset, the accurate location of the CE-6 landing site on the reference base map was determined as (153.9776° W, 41.6251° S, −5273 m, see the Methods section for details); the relative positions of the four footplates of the CE-6 lander, scoop sampling areas, and drilling sampling point were marked in relation to the landing site, and their accurate coordinates within the CE-6 landing area high-precision terrain dataset were calculated (Fig. 1), providing foundational background data for the analysis of lunar samples and in situ detection data.
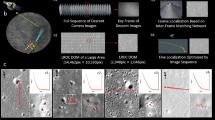
We marked the location of the CE-6 landing site in terrain data and images with different spatial resolutions. The positional relationships between these datasets can be seen in Supplementary Material 1. It can be seen from the LCAM DOM (Fig. 2a) and the PCAM three-dimensional (3D) rendering terrain (Fig. 2b) that the distribution and relative distances of topographic features around the landing site, such as craters (marked as A ~ C) and rocks (marked as D ~ E), are consistent across different terrain datasets. In addition, the PCAM image mosaic and raw images taken after landing (Fig. 2c, d) reveal an elevated terrain feature ~24° northwest of the landing site. By comparing with the CE2TMap2015 DOM, the southern rim of the Chaffee crater can be observed in the same direction, over 62 km away from the landing site (Fig. 2e).

a The LCAM DOM with a spatial resolution of 1 cm; b the PCAM 3D rendering terrain with a spatial resolution of 1 mm; c the PCAM mosaic; d the PCAM raw image, corresponding to the cyan box area in (c); e the CE2TMap2015 DOM for morphology comparison; (f) the LROC NAC image. The red circles in (a, b) indicate landmarks, while those in (c, d) and (e) indicate the southern rim of the Chaffee crater. The red cross in (a) and (e) indicates the location of the CE-6 landing site.
Furthermore, NASA’s lunar reconnaissance orbiter (LRO) captured an image of the CE-6 lander using the narrow-angle camera (NAC) while flying over the CE-6 landing area on June 7, 2024 (image ID LROC NAC M1472410644L18, Fig. 2f). The LROC team calculated the CE-6 landing site location as (153.9852° W, 41.6385° S, −5256 m), with a positional accuracy of ±30 m18, which is within the same order of magnitude as other CE-6 landing site positioning results derived from LRO images19. The deviation between this position and our results is 172.2 m in longitude, 406.3 m in latitude, and 17.0 m in elevation. Therefore, the horizontal positional deviation between the two locations is 441.3 m, and the 3D positional deviation is 441.7 m. However, the positional deviation of our results is only about 1 pixel from those derived from CE2TMap201520. The 441.7 m difference between our coordinates and those of the LRO team reflects the positional discrepancy between CE2TMap2015 and LRO terrain data, which is based on the LOLA-plus-GRAIL coordinate framework, on the farside of the Moon21.
By reason of the foregoing, it can be concluded that the location of the CE-6 landing site derived from the high-precision terrain dataset is accurate and reliable.
Micro-scale geological analysis of the landing area
High-precision terrain data and accurate landing site localization can support the micro-scale geological analysis of the CE-6 landing area, and provide evidences for confirming the material characteristics and provenances of the samples. Based on the high-resolution terrain dataset of the CE-6 landing area and the determined landing site, morphological features such as craters and rocks in the landing area were identified and extracted. Geological characteristics, including lunar surface roughness, depth-to-diameter ratio of fresh craters, regolith thickness, and rock abundance of the landing area, were analyzed. The specific results are as follows.
We selected three craters (denoted as C1–C3, Fig. 3a) in the near vicinity of the CE-6 landing site. The landing site is located on the southwestern rim of crater C1, which has a diameter of 50.95 m and a center distance of 26.93 m from the landing site. According to CE6_LCAM_DEM, the maximum depth of crater C1 is 2.79 m, with a depth-to-diameter ratio of ~0.05, indicating that it is a severely degraded crater. About 8 m southwest of the landing site is crater C2, which has a sharp rim and a diameter of about 4.8 m. Crater C2 has a depth of approximately 0.75 m (Fig. 3b, c), with a depth-to-diameter ratio of ~0.16, and numerous small rocks are visible at the crater’s bottom and rim. Concentric structures with a diameter of around 2.5 m can be faintly seen on the crater walls. To the east is crater C3, which has a diameter of 2.3 m and a depth of about 0.44 m, resulting in a depth-to-diameter ratio of ~0.19 (Fig. 3b, d). Concentric structures can also be observed, with a diameter of about 1 m. The depth-to-diameter ratio (close to 0.2) and ejecta (Fig. 3c, d) suggest that craters C2 and C3 are relatively fresh22,23. Based on CE6_LCAM_DEM data, the average slope of the area around the landing site (within the range shown in Fig. 3a) was calculated at a baseline of 1 m. The results show that the average slope of this area is 3.24°, with gentle slopes (below 7°) accounting for ~82% of the total area. This indicates that the region is mostly flat, which is favorable for the safe landing and sampling operations.

a Elevation distribution map near the landing site, where black dots represent the extracted rims of crater C1 on the north side of the landing site, red dots are the fitted centers of crater C1 and Crater C2, and the red cross marks the landing site. The base map is the CE6_LCAM_DEM shaded relief map; b elevation profiles between the centers of surrounding craters and the landing site (corresponding to AB and BC in panel (a)); c the high-resolution image of crater C2, and (d) the high-resolution image of crater C3, concentric structures can be clearly seen on the crater walls. The continuous red line represents the outer rim of the concentric crater, while the dashed red line indicates its inner rim; e, f bidirectional slope distribution and RMS height distribution maps near the landing area.
The photometry of the lunar regolith is influenced by its roughness, which can be characterized using bidirectional slope and Root Mean Square (RMS) height (see the Methods section for details, the results are in Table 1). Previous studies have shown that at the micro-scale, surface roughness may be related to space weathering, micrometeorite impacts, and regolith gardening experienced by the geological unit currently located24. Based on the CE6_PCAM_DEM data, bidirectional slope25 at a 7 mm scale and RMS height25,26,27,28 with a 125 mm window size were calculated for a ~5 m range in the CE-6 landing area. The results indicate that the bidirectional slope in the area can reach up to 73°, with a median of 6° (Fig. 3e). The maximum RMS height is 25 mm, with a median of 3 mm (Fig. 3f). In comparison, at the same scale, the bidirectional slope of the CE-5 landing area is up to 78°, with a median of 7°, and the RMS height has a maximum value of 43 mm and a median of 3 mm. For the CE-4 landing area, the bidirectional slope reaches a maximum of 40°, with a median of 10°, and the RMS height has a maximum value of 18 mm and a median of 4 mm29. Thus, the surface roughness of the CE-6 landing area is closer to that of the CE-5 area and is smaller than that of the CE-4 area.
There is a large number of craters around the CE-6 landing site. Based on the CE6_LCAM_DOM data, 1481 craters were identified (see Supplementary Material 2 and supplementary Fig. 2) within an area of 300 m × 400 m region around the landing site, with diameters up to a maximum of 56.41 m, and an average of 2.28 m30. Based on CE6_LCAM_DEM data, the average depth-to-diameter ratio of fresh craters (i.e., craters with ejecta clearly visible at their rims), with diameters ranging from 2 m to about 30 m, is ~0.214. Based on CE2TMap2015 DEM, the average depth-to-diameter ratio of fresh craters, with diameters ranging from 80 m to about 300 m within an area of 9 km × 8 km around the CE-6 landing site, is ~0.050. At the two scales of 2–30 m and 80–300 m, the average depth-to-diameter ratios of fresh craters at the CE-4 landing area were calculated to be ~0.352 and ~0.064, respectively, while the average depth-to-diameter ratios of fresh craters at the CE-5 landing area were ~0.183 and ~0.059. This indicates that the depth-to-diameter ratio of small fresh craters (2 m to several tens of meters) near the CE-6 landing site is similar to that of the CE-5 landing site, but significantly lower than that of the CE-4 site. But for mid-scale craters larger than 80 m, the average depth-to-diameter ratio for the CE-6 landing area falls between those of the CE-5 and CE-4 landing areas, with minimal differences among the three (see Supplementary Material 2 for details).
Additionally, 26 concentric craters were discovered around the CE-6 landing site, which can be used to analyze the lunar regolith thickness. According to the empirical formula for surface regolith thickness based on crater morphology31,32 (see supplementary material 3 for details), the regolith thickness around the CE-6 landing site was estimated to range from 3.4 to 8.5 m. Radar observations show that the lunar regolith thickness at the CE-5 landing area is ~2.5 m33, while the regolith thickness at the CE-4 landing area is around 12 m34. Using the same concentric craters statistical method, the fine-grained regolith thickness in the CE-4 landing site is estimated to be 2.5–7.5 m35. Beneath this regolith layer, an additional ejecta deposit with a depth of ~13 m is also suggested35. The regolith thickness in the CE-5 landing site is estimated to be 4–6 m36, while the regolith thickness in the CE-6 landing site is estimated to be 1.1 to 7.0 m37. Thus, it is evident that the lunar regolith thickness at the CE-6 landing area (3.4–8.5 m) is similar to that at the CE-5 landing area (4–6 m) but shallower than that at the CE-4 landing area (12–13 m).
Rock abundance is generally related to the exposure time experienced by the geological unit38. Using CE6_LCAM_DOM data, a total of 1142 small rocks were identified and extracted from a 100 m × 100 m area around the landing site (See Supplementary Material 4 and Supplementary Fig. 4a), with a maximum diameter of 0.52 m and an average diameter of 0.11 m. The rock abundance, defined as the ratio of the total area occupied by rocks to the total area of the region, is 0.14%. At the same scale, the rock abundance at the CE-4 and CE-5 landing areas was calculated to be 0.07 and 0.43%, respectively. According to the distribution curve trend of the rock abundance fitting line39 (see Supplementary Material 4 and Supplementary Fig. 4b), the number of larger rocks with diameters exceeding 0.2 m is relatively low within the CE-6 landing area. For comparison, rock abundance data derived from Diviner (with a spatial resolution of 200 m)40 was used to conduct a statistical analysis within a 10 km radius around the CE-6 landing site, resulting in an average rock abundance of 0.31%. The calculated average rock abundance within a 10 km radius around the CE-4 and CE-5 landing sites was found to be 0.20 and 0.50%, respectively. Overall, the rock abundance in the CE-6 landing area is relatively low. It is slightly higher than that in the CE-4 landing area, but lower than that in the CE-5 landing area.
In summary, the geological characteristics of the CE-6 landing area at the micro-scale (from millimeters to sub-kilometers), such as surface roughness, depth-to-diameter ratio of fresh craters, regolith thickness, and rock abundance, all fall between those of the CE-4 and CE-5 landing areas, being closer to those of the CE-5 landing area.
Distribution and potential provenances of ejecta in the landing area
The CE-6 landing area is predominantly covered by dark lunar mare basalts, with a small amount of foreign ejecta. Images captured by CE-6 PCAM revealed a widespread distribution of possible secondary craters near the landing site, characterized by relatively shallow depths and significant debris around their rims (Fig. 4a), indicating that the samples collected by CE-6 are likely to contain ejecta components2,8. To identify the potential provenances of samples from the CE-6 landing area, we searched for craters around the CE-6 landing site that might have contributed ejecta to the landing site using CE2TMap2015 DOM data (Fig. 4b–d). On one hand, based on the USGS geological map41, craters labeled as Copernican or Eratosthenian in geological age were identified around the landing site. On the other hand, for areas near the landing site, the focus was on identifying craters with sharp rims and pronounced bowl-shaped features. These features are indicative of craters that could potentially be significant provenances of ejecta impacting the landing site.

a The identifiable possible ejecta in CE-6 PCAM images, indicated by white arrows; b the distribution of top ten craters with the largest ejecta thickness potentially transported to the CE-6 landing site, marked with a cross indicating the landing site, with the base map being the USGS geological map overlaid with CE2TMap2015 DOM; c, d the close-up images near the landing site, with (c) using CE2TMap2015 DOM as the base map, showing the distribution of ejecta streaks around the landing site, and (d) using the USGS geological map overlaid with CE2TMap2015 DOM as the base map. In this figure, C1 is the small crater near the landing site, as shown in Fig. 3a; C4 is located on the northern rim of the mare region where the landing site is situated; C5 is positioned on the southern rim of the mare region; C6, C7, and C8 are located on the southern rim of the crater Apollo; e a geological stratigraphy of the ejecta at CE-6 landing site from possible craters.
Using the identified craters, the potential thickness of ejecta contributed by these craters is calculated42 (see Supplementary Material 5 for details). Based on the study of CE-6 samples, it has been determined that the age of the mare basalt at the CE-6 landing site is ~2.8 Ga3,4. Following this conclusion, we employed the crater size-frequency distribution (CSFD) dating method to determine the geological ages of all potential provenance craters for the ejecta (see Supplementary Material 6 for details). The results indicate that among the identified craters, crater White (3.26 Ga), Hausen (3.65 Ga), and Finsen (3.5 Ga) are older than the age of CE-6 basalt, making it less likely that they contributed ejecta. In contrast, craters C1 (37.5 Ma), C7 (576 Ma), C5 (1.12 Ga), C4 (1.21 Ga), C8 (1.88 Ga), Chaffee S (2.39 Ga), and C6 (2.48 Ga) are all younger than the age of CE-6 basalt, and are thus potential provenances of ejecta. The geological ages of these craters are similar to those derived from remote sensing data prior to CE-6 landing13. We have also created a geological stratigraphy based on ejecta thickness, where material from younger provenance craters is positioned at the top (Fig. 4e).
Finally, we directly discerned the provenances of foreign ejecta from the imagery, as depicted in Fig. 4c. Analyzing the distribution of these craters and the orientation of ejecta streaks, the ejecta rays in the northwest-southeast direction from crater Chaffee S are relatively distinct in images (Fig. 4c). Conversely, the provenances of several ejecta streaks in the northeast-southwest direction are more difficult to identify.
Discussion
As previously mentioned, the geological characteristics of the CE-6 landing area at the micro-scale discussed in this work, including surface roughness, depth-to-diameter ratio of fresh craters, regolith thickness, and rock abundance, are situated between those of the CE-4 and CE-5 landing areas, indicating that its surface exposure time should also lie between that of the CE-4 and CE-5 landing areas. This is consistent with the dating results that the latest geological age of the CE-6 landing area is around 2.8 Ga3,4, the geological age of the CE-4 landing area is approximately 3.6–3.7 Ga35,43, and the geological age of the CE-5 landing area is around 2.0 Ga44,45. However, our results also indicate that, at the micro-scale, geological characteristics such as surface roughness and the depth-to-diameter ratio of fresh craters exhibit inconsistencies with those observed at the macro-scale. Previous studies have suggested that, at the kilometer scale, ancient highland regions with longer exposure times exhibit significantly greater surface roughness compared to the younger mare regions46,47,48. By contrast, at the meter scale or smaller, the difference in surface roughness between highlands and mare regions becomes less pronounced25. Our statistical results further show that, at the millimeter to centimeter micro-scale, the surface roughness of the CE-6 landing area is quite similar to that of the CE-5 landing area but lower than that of the CE-4 landing area. However, the differences among the three areas are minimal. This indicates that even within mare regions of different exposure ages, the variation in surface roughness is also quite small, suggesting that the influence of exposure time on surface roughness is not significant.
The depth-to-diameter ratio of craters reflects their degradation degree and is related to their exposure time. Generally, for craters with diameters greater than a kilometer, the depth-to-diameter ratio is negatively correlated with exposure time, meaning that the depth-to-diameter ratio tends to decrease as exposure time increases. However, our statistics indicate that, at the scale of several meters to tens of meters, the depth-to-diameter ratio of fresh craters in the relatively younger CE-6 and CE-5 landing areas is significantly smaller than that in the older CE-4 landing area. A likely explanation for this phenomenon is that the shallow depth of these craters is controlled by the thickness and looseness of the surface regolith in these areas. The CE-4 landing area has a thicker and looser regolith, which facilitates the formation of deeper small craters. In contrast, the surface regolith in the CE-6 and CE-5 landing areas is relatively shallower and contains more rocks, making it more difficult to form deeper, small craters. This results in an overall lower depth-to-diameter ratio of fresh craters in these regions.
Our statistics also reveal that although the latest geological age of the CE-6 landing area is 0.8 Ga older than that of the CE-5 landing area and 0.8–0.9 Ga younger than that of the CE-4 landing area, its micro-scale geological characteristics are remarkably similar to those of the CE-5 landing area. We speculate that this is related to the significant modification of the CE-6 landing area by later ejecta. The CE-5 landing area is a relatively pure basalt-covered region with minimal influence from ejecta, while the CE-6 landing area has been more affected by ejecta. The CE-4 landing area is also modified by Finsen ejecta. However, the geological age of Finsen (3.5 Ga) is close to that of the CE-4 landing area (3.6–3.7 Ga)35,43, making the modified surface still have an old exposure age. Certain parts of the CE-6 landing area are covered by relatively younger secondary ejecta, making its surface exposure time more comparable to that of the CE-5 landing area, which results in its various geological characteristics being closer to those of the CE-5 landing area.
From the high-resolution terrain dataset of the CE-6 landing area, it is evident that the CE-6 lander landed right on the rim of crater C1, which has a diameter of ~51 m. According to different impact ejecta models42,49,50, the ejecta thickness from crater C1 at this location is about 0.31–0.35 m. Therefore, the local mare material excavated from this crater should constitute the primary material of CE-6 samples. Additionally, numerous concentric craters were found around the CE-6 landing site. Images show noticeable layering on the walls of these craters, indicating differences in density or composition between the surface regolith and the shallow subsurface regolith. The surrounding surface also exhibits loose regolith similar to that found in the CE-4 landing area, suggesting the possible distribution of secondary ejecta. We calculated the ejecta thickness in the CE-6 landing area (see Supplementary Material 5), with local mare material from crater C1 constituting about 30–35% in volume49. The ejecta rays in the northwest-southeast direction from crater Chaffee S are quite clear in images, and the ejecta thickness sourced from this crater is predicted to be ~539 or ~16 cm49,50, the latter being consistent with other reported results of 15.1–16.6 cm7,8,9,12,13. The dating results of secondary craters on the ejecta blanket around crater Chaffee S indicate that its geological age is \({2.39}_{-0.25}^{+0.24}\) Ga (see Supplementary Material 6), which is younger than the mare basalt age at the CE-6 landing area revealed by CE-6 samples3,4. It is likely that the Mg-rich ejecta from crater Chaffee S6,10 could be included in the lunar samples collected by CE-6.
The results of this study can provide evidence for revealing the characteristics of the topography, landforms, lunar regolith, and possible foreign ejecta of the CE-6 landing area at scales from millimeters to sub-kilometers. The local mare basalt is from the ejecta of C1, and foreign ejecta with Mg-rich materials might originate from crater Chaffee S. Combined with recent remote sensing analyses of the CE-6 landing area at kilometers to sub-kilometers6,7,8,9,12,13, as well as research on CE-6 samples3,4, these findings can offer constraints for understanding the material characteristics and provenances of the lunar samples, which would benefit the interpretation of laboratory analysis results of the samples.
Methods
Instruments and datasets
The observation data used in this study mainly include LCAM sequence images and PCAM close-range stereo images. In addition, Chang’E-2 (CE-2) global lunar terrain data (CE2TMap2015)14,15, including the DOM and DEM datasets, is used as the reference base map.
LCAM is one of the scientific payloads mounted on the bottom of the CE-6 lander (see Table 2 for technical specifications), which is used to capture images of the lunar surface during the powered descent phase to document the entire landing process. In this study, 142 LCAM images with a frame frequency of 1 s from the approaching phase of the CE-6 lander (below an orbital altitude of 2500 m) were selected for the reconstruction of the landing area terrain data. The selected images include both oblique views from orbital altitudes above 2000 m and near-vertical views taken as the lander approached the surface. This combination of images provides a wider range of observation angles and greater image overlap, which is beneficial for data processing and improves the accuracy of the 3D coordinates of image tie points51.
PCAM is another scientific payload that contains two optical systems mounted on a rotating platform of the CE-6 lander (see Table 2 for technical specifications). During the lunar surface exploration, by utilizing the rotation of the platform, PCAM captures optical images of the lunar surface within a horizontal range of 0° to 180° north of the landing site and a pitch range of −90° to 0°. These images are used for studying the terrain and landforms of the landing area. In this study, 120 pairs of PCAM stereo images acquired during the lunar surface exploration were selected to develop a detailed terrain dataset of the CE-6 landing area.
CE2TMap2015 is generated using CE-2 stereo images with a spatial resolution of 7 m. The average relative error of CE2TMap2015 in horizontal positioning is 5 m, with a standard deviation of 4 m, while the average relative error in elevation is 2 m, with a standard deviation of 5 m. Compared to the absolute positions of five laser reflectors on the lunar nearside, the horizontal position deviation of CE2TMap2015 ranges from 21 to 97 m, while the elevation deviation ranges from 2 to 19 m15,21.
High-precision terrain data development and CE-6 landing site positioning
The processing workflow and relevant coordinate systems used in this study are detailed in Supplementary Material 7.
In this study, a lunar surface cartesian coordinate system (LSCS) was first established, using the predicted CE-6 landing site location in CE2TMap2015 DOM as the origin. A hybrid matching method52,53 was employed to achieve hybrid matching between LCAM sequence images, and between LCAM images and CE2TMap2015 DOM, resulting in a total of 55,892 image tie points. From these tie points, eight evenly distributed small crater centers were manually selected as lunar surface control points (LGCPs). Among them, LGCP01 was designated as the elevation control point, while the remaining seven served as both horizontal and elevation control points. Their 3D coordinates were extracted from CE2TMap2015. Based on photogrammetric bundle adjustment theory54, the exterior orientation parameters (EOs) of each LCAM image and the coordinates of all tie points were determined in the LSCS. A pixel-level point cloud was then generated using dense image matching based on the adjusted EOs, and two versions of DEMs, referred to as CE6_LCAM_DEM, were interpolated using a triangulated irregular network (TIN), with spatial resolutions of 1 and 10 cm, respectively. Among them, the 10 cm resolution dataset is a global product, covering a 2.4 km (east-west) × 3.0 km (north-south) area around the landing site, while the 1 cm resolution dataset is a local, high-resolution product covering only a 300 m × 400 m area. Finally, using the DEMs and the adjusted EOs, orthoimage reprojection techniques were applied to generate two versions of DOMs, referred to as CE6_LCAM_DOM, with matching spatial resolutions and coverage. The LCAM terrain data were produced in the LSCS.
Similarly, we generated the PCAM DEM and DOM (denoted as CE6_PCAM_DEM and CE6_PCAM_DOM) covering an area up to 18 m north of the landing site, using high-resolution PCAM close-range stereo images, with spatial resolutions of 3 and 1 mm, respectively. The only difference in this process is that no control points were used. Instead, the EOs of PCAM images were derived by combining real-time telemetry data of the lander’s pitch and yaw mechanisms, payload mounting parameters, and other information in the CE-6 mechanical coordinate system (LMCS). Therefore, the PCAM terrain data were produced in the LMCS.
The three types of terrain data, including CE2TMap2015, LCAM terrain data, and PCAM terrain data, were geometrically registered to generate a high-precision terrain dataset for the CE-6 landing area. This dataset features a unified spatial reference framework (consistent with the lunar geographic coordinate system (LGCS), used in CE2TMap2015), a common projection coordinate system, and spatial resolutions ranging from millimeters to meters. Furthermore, based on the CE-6 lander’s 3D model and in-orbit telemetry attitude parameters, the relative positions of the lander’s four footpads, scoop sampling areas, and drilling sampling point were precisely marked, providing accurate coordinates for these elements in the CE-6 landing area terrain dataset.
During the development of the high-precision terrain dataset for the CE-6 landing area, strict geometric registration was achieved between the PCAM and LCAM terrain data by calculating the seven coordinate transformation parameters between the LMCS and LSCS, including three rotation angles, three translation shifts, and one scale factor. Using these parameters, the 3D coordinates of the origin of the PCAM terrain data (i.e., the CE-6 landing site) in the LCAM terrain data could be determined. By transforming these coordinates into the LGCS, the precise position of the CE-6 landing site on the lunar surface was obtained as (153.9776° W, 41.6251° S, −5273 m).
The positional accuracy of the CE-6 landing area high-precision terrain dataset and the landing site depends on the processing accuracy of the LCAM and PCAM terrain data, as well as the registration accuracy between these datasets and the CE2TMap2015.
During the processing of LCAM terrain data, the RMS of the reprojection error of 55,892 LCAM image tie points after photogrammetric adjustment is 0.38 pixels, reflecting the relative positional accuracy of the reconstructed terrain data, with a corresponding spatial position error RMS of 0.66 m. For PCAM terrain data, the RMS of the reprojection error of 162,149 PCAM image tie points is better than 0.04 pixels, corresponding to a spatial position error RMS of 0.06 m. In summary, both the LCAM and PCAM terrain data for the CE-6 landing area exhibit relative positional accuracies better than 1 pixel, with horizontal positional accuracy in the decimeter to centimeter range.
Regarding registration accuracy, during the alignment of PCAM terrain data with LCAM terrain data, ten easily identifiable and evenly distributed small rocks around the landing site were selected as control points, denoted as PGCP01 to PGCP10 (Fig. 5b, d). The RMS of the horizontal and vertical position deviations of the PGCPs are 0.04 mm (1δ) and 0.02 mm (1δ), respectively, with a total RMS position deviation of 0.05 mm (1δ), achieving centimeter-level registration accuracy (see Table 3). For the alignment of LCAM terrain data with CE2TMap2015, eight control points (Fig. 5a, c) were used. Adjustment results show that the RMS of horizontal and vertical position deviations of the LGCPs are 1.346 m (1δ) and 1.817 m (1δ), respectively, with a total RMS position deviation of 2.261 m (1δ), achieving meter-level registration accuracy (see Table 4). Therefore, the positional accuracy of the high-precision terrain dataset for the CE-6 landing area and the landing site relative to CCE2TMap2015 reaches meter-level, and its absolute positional accuracy remains consistent with that of CE2TMap201515.

a The LGCPs on the CE2TMap2015 DOM and LCAM DOM; b the PGCPs in LCAM DOM and PCAM DOM; c crater centers selected as LGCPs; d Feature points selected as PGCPs.
Calculation of bidirectional slope and RMS height
The bidirectional slope is the two-dimensional topographic slope and can be used to measure the anisotropic characteristics of the surface topography25. In a DEM format, we first select a point of interest with coordinates of (xi, yj, zi, j), where i and j represent the indices in the horizontal and vertical directions, respectively. We then select two points in the horizontal direction, denoted by (xi−1, yj, zi−1, j) and (xi+1, yj, zi+1, j), and another two points in the vertical direction, denoted by (xi, yj−1, zi, j−1) and (xi, yj+1, zi, j+1). These four surrounding points form two vectors in the vertical and horizontal directions, and the two vectors further form a plane, whose surface normal can be calculated using vector geometry as:
Where
Finally, the bidirectional slope is calculated as the angle between \({\hat{n}}_{x,y}\) and the normal of a flat surface, that is, (0, 0, 1). The effective baseline is the square root of the area of the rhombus formed by the four points, which is ~1.4 times the spatial resolution of the DEM. In our research, the resolution of the CE-6 PCAM DEM data is 5 mm, thus the effective baseline is ~7 mm.
RMS height is the standard deviation of elevations within a two‐dimensional window, and it is widely used in planetary radar remote sensing25,26,27. RMS height usually increases with the size of the window, because the number of points grows with the window size. It can be calculated using an equation like:
For the DEM data, where n is the number of pixels in a defined two-dimensional window, \(z({x}_{i})\) is the elevation of each pixel in the window, and \(\bar{z}\) is the mean value of the elevation in the window. In our research, the window is set to be 125 mm × 125 mm, and the resolution of the CE-6 PCAM DEM data is 5 mm, which means, n is 25 × 25 = 625.
Data availability
CE2TMap2015 data is available at the Data Release System of China’s Lunar Exploration Program: (https://moon.bao.ac.cn/Moon/index/index.html, https://doi.org/10.12350/CLPDS.GRAS.CE2.DOM-7m.vA. https://doi.org/10.12350/CLPDS.GRAS.CE2.DEM-20m.vA). All the CE-6 datasets generated and/or analyzed during the current study are listed in a “Data introduction” document, and are available in a public online repository, accessible at: https://moon.bao.ac.cn/Moon/CE6SourceData.jsp.
References
Yang, W. et al. Scientists eager for Chang’e-6 lunar farside samples to bring new discoveries. Innovation 5, 100660 (2024).
Li, C. et al. Nature of the lunar farside samples returned by the Chang’E-6 mission. Natl Sci. Rev. 11, nwae328 (2024).
Zhang, Q. et al. Lunar farside volcanism 2.8 billion years ago from Chang’e-6 basalts. Nature https://doi.org/10.1038/s41586-024-08382-0 (2024).
Cui, Z. et al. A sample of the Moon’s far side retrieved by Chang’e-6 contains 2.83-billion-year-old basalt. Science 386, 1395–1399 (2024).
Zeng, X. et al. Landing site of the Chang’e-6 lunar farside sample return mission from the Apollo basin. Nat. Astron. 7, 1188–1197 (2023).
Wang, X. et al. Lunar farside South Pole‐Aitken basin interior: evidence for more extensive central cryptomaria in the South Pole‐ Aitken compositional anomaly (SPACA). J. Geophys. Res. Planets. 129, e2023JE008176 (2024).
Gou, S. et al. Complex basalt evolution in the Chang’e-6 landing area. Earth Planet. Sci. Lett. 648, 119091 (2024).
Qian, Y. et al. Long-lasting farside volcanism in the Apollo basin: Chang’e-6 landing site. Earth Planet. Sci. Lett. 637, 118737 (2024).
Yue, Z. et al. Geological context of the Chang’e-6 landing area and implications for sample analysis. Innovation 5, 100663 (2024).
Qian, Y. et al. Extensive intrusive magmatism in the lunar Farside Apollo and South Pole–Aitken basins, Chang’e-6 landing site. Astrophys. J. Lett. 971, L39 (2024).
Jia, Z. et al. Geologic context of Chang’e-6 candidate landing regions and potential non-mare materials in the returned samples. Icarus 416, 116107 (2024).
Gao, A. et al. Geological background of the Chang’e 6 landing site and the provenance of returned samples. J. Geophys. Res. Planets. 130, e2024JE008658 (2025).
Xu, L. et al. Chronology, local stratigraphy, and foreign ejecta materials at the Chang’e‐6 landing site: constraints on the provenance of samples returned from the Moon’s farside. Geophys. Res. Lett. 51, e2024GL111311 (2024).
Li, C. et al. Lunar global high precision terrain reconstruction based on Chang’e-2 stereo images (in Chinese). Geomat. Inf. Sci. Wuhan. Univ. 43, 486–495 (2018).
Ren, X. et al. A global adjustment method for photogrammetric processing of Chang’E-2 stereo images. IEEE Trans. Geosci. Remote Sens. 57, 6832–6843 (2019).
Wagner, R. V. et al. Coordinates of anthropogenic features on the Moon. Icarus 283, 92–103 (2017).
Wu, B. et al. Centimeter-resolution topographic modeling and fine-scale analysis of craters and rocks at the Chang’E-4 landing site. Earth Planet. Sci. Lett. https://doi.org/10.1016/j.epsl.2020.116666 (2021).
LROC. First look: Chang’e 6. https://www.lroc.asu.edu/images/1374 (2024).
Tong, X. et al. Illumination robust landing point visual localization for lunar lander with high-resolution map generation. IEEE J. Sel. Top. Appl. Earth Obs. 18, 1577–1591 (2025).
Liu, Z. et al. High-precision visual localization of the Chang’e-6 lander. Natl Remote Sens. Bull. 28, 1648–1655 (2024).
Liu, J. et al. Descent trajectory reconstruction and landing site positioning of Chang’E-4 on the lunar farside. Nat. Commun. https://doi.org/10.1038/s41467-019-12278-3 (2019).
Stopar, J. D. et al. Relative depths of simple craters and the nature of the lunar regolith. Icarus 298, 34–44 (2017).
Fassett, C. I. & Thomson, B. J. Crater degradation on the lunar maria: topographic diffusion and the rate of erosion on the moon. J. Geophys. Res. Planets. 119, 2255–2271 (2014).
Helfenstein, P. & Shepard, M. K. Submillimeter‐scale topography of the lunar regolith. Icarus 141, 107–131 (1999).
Cai, Y. & Fa, W. Meter-scale topographic roughness of the moon: the effect of small impact craters. J. Geophys. Res. Planets. 125, e2020JE006429 (2020).
Shepard, M. K. et al. The roughness of natural terrain: a planetary and remote sensing perspective. J. Geophys. Res. Planets 106, 32777–32795 (2001).
Shepard, M. K. & Campbell, B. A. Shadows on a planetary surface and implications for photometric roughness. Icarus 134, 279–291 (1998).
Hapke, B. Bidirectional reflectance spectroscopy: 3. Correction for macroscopic roughness. Icarus 59, 41–59 (1984).
Guo, D. Millimeter- to decimeter-scale surface roughness of the moon at the Chang’e-4 exploration region. Geophys. Res. Lett. https://doi.org/10.1029/2021GL094931 (2021).
Kneissl, T. et al. Map-projection-independent crater size-frequency determination in GIS environments - new software tool for ArcGIS. Planet. Space Sci. 59, 1243–1254 (2011).
Quaide, W. & Oberbeck, V. Thickness determinations of the lunar surface layer from lunar impact craters. J. Geophys. Res. 73, 5247–5270 (1968).
Bart, G. et al. Global survey of lunar regolith thickness from LROC images. Icarus 215, 485–490 (2011).
Su, Y. et al. Hyperfine structure of regolith unveiled by Chang’E-5 lunar regolith penetrating radar. IEEE Trans. Geosci. Remote Sens. 60, 1–14 (2022).
Li, C. et al. The Moon’s farside shallow subsurface structure unveiled by Chang’E-4 lunar penetrating radar. Sci. Adv. 6, eaay6898 (2020).
Huang, J. et al. Geological characteristics of Von Kármán Crater, northwestern south pole-Aitken Basin: Chang’E-4 landing site region. J. Geophys. Res. Planets. 123, 1684–1700 (2018).
Qian, Y. et al. Copernican-aged (<200 Ma) impact ejecta at the Chang’e-5 landing site: statistical evidence from crater morphology, morphometry, and degradation models. Geophys. Res. Lett. 48, e2021GL095341 (2021).
Li, J. et al. The lunar regolith thickness and stratigraphy of the Chang’E-6 landing site. Remote Sens. 16, 3976 (2024).
Vanga, S. et al. Rock abundance on the lunar mare on surfaces of different age: Implications for regolith evolution and thickness. Geophys. Res. Lett. 49, e2021GL096710 (2022).
Li, Y. & Wu, B. Analysis of rock abundance on lunar surface from orbital and descent images using automatic rock detection. J. Geophys. Res. Planets. 1235, 1061–1088 (2018).
Bandfield, J. et al. Lunar surface rock abundance and regolith fines temperatures derived from LRO diviner radiometer data. J. Geophys. Res. Planets. 116, E00H02 (2011).
Fortezzo, C. et al. Release of the digital unified global geologic map of the moon at 1:5,000,000-scale. In 51st Lunar and Planetary Science Conference (Lunar and Planetary Institute, 2020).
Pike, R. Ejecta from large craters on the Moon: comments on the geometric model of McGetchin et al. Earth Planet. Sci. Lett. 23, 265–271 (1974).
Ling, Z. et al. Composition, mineralogy and chronology of mare basalts and non-mare materials in Von Kármán crater: landing site of the Chang’E− 4 mission. Planet. Space Sci. 179, 104741 (2019).
Li, Q. et al. Two-billion-year-old volcanism on the Moon from Chang’e-5 basalts. Nature 600, 54–58 (2021).
Che, X. et al. Age and composition of young basalts on the moon, measured from samples returned by Chang’e-5. Science 374, 887–890 (2021).
Kreslavsky, M. A. & Head, J. W. The steepest slopes on the moon from lunar orbiter laser altimeter (LOLA) data: spatial distribution and correlation with geologic features. Icarus 273, 329–336 (2016).
Kreslavsky, M. A. et al. Lunar topographic roughness maps from lunar orbiter laser altimeter (LOLA) data: scale dependence and correlation with geologic features and units. Icarus 226, 52–66 (2013).
Rosenburg, M. A. et al. Global surface slopes and roughness of the moon from the lunar orbiter laser altimeter. J. Geophys. Res. Planets 116, E02001 (2011).
Xie, M., Liu, T. & Xu, A. Ballistic sedimentation of impact crater ejecta: implications for the provenance of lunar samples and the resurfacing effect of ejecta on the lunar surface. J. Geophys. Res. Planets. https://doi.org/10.1029/2019JE006113 (2020).
Sharpton, V. Outcrops on lunar crater rims: implications for rim construction mechanisms, ejecta volumes and excavation depths. J. Geophys. Res. Planets. 119, 154–168 (2014).
Fritsch, D. et al. Dense image matching using oblique imagery - towards “all-in-one” photogrammetry. GIM International http://www.gim-international.com/content/article/towards-all-in-one-photogrammetry (2011).
He, J. et al. Edge information based crater detection and matching for lunar exploration. In Proc. International Conference on Intelligent Control and Information Processing 302–307 (IEEE, 2010).
Maass, B. et al. Crater navigation system for autonomous precision landing on the moon. J. Guid. Control Dyn. 43, 1414–1431 (2020).
Wang, Z. Principles of Photogrammetry [with Remote Sensing] (Press of Wuhan Technical University of Surveying and Mapping, 1990).
Acknowledgements
The Chang’E data used in this work were processed and produced by GRAS (Ground Research and Application System) of China’s Lunar and Planetary Exploration Program. We also thank the Lunar Reconnaissance Orbiter (LRO) and other related teams for providing the science data used in this study. This study was funded by the National Natural Science Foundation of China, grant no. 12203073 to X.Z. and 42371384 to X.R.; the Key Research Program of the Chinese Academy of Sciences, grant no. ZDBS-SSW-JSC007 to C.L. and J.L., and Bureau of Frontier Sciences and Basic Research, CAS, grant no. QYJ-2025-0104.
Author information
Authors and Affiliations
Contributions
X.R., W.Z., J.L. and C.L. designed the research. W.Y. and X.Z. wrote the draft manuscript. W.Y. and X.Z. contributed equally to this work. W.Y., X.Z., X.R. and W.C. performed the topography, geology, and chronology data analysis. X.G., B.L., Z.Z. and Q.F. conducted Chang’E data processing, calibration, and validation.
Corresponding authors
Ethics declarations
Competing interests
The authors declare no competing interests.
Peer review
Peer review information
Nature Communications thanks Myriam Lemelin, who co-reviewed with Frederic Diotte; and the other, anonymous, reviewer for their contribution to the peer review of this work. A peer review file is available.
Additional information
Publisher’s note Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Supplementary information
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution-NonCommercial-NoDerivatives 4.0 International License, which permits any non-commercial use, sharing, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if you modified the licensed material. You do not have permission under this licence to share adapted material derived from this article or parts of it. The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by-nc-nd/4.0/.
About this article

Cite this article
Yan, W., Zeng, X., Ren, X. et al. Geological characteristics of Chang’E-6 landing area in micro-scale unveiled by new observation data. Nat Commun 16, 4219 (2025). https://doi.org/10.1038/s41467-025-59443-5
Received:
Accepted:
Published:
Version of record:
DOI: https://doi.org/10.1038/s41467-025-59443-5
This article is cited by
-
Intelligent vision-guided trajectory reconstruction enables rapid localization and characterization of the Chang’E-6 landing site
Communications Earth & Environment (2025)
