
Abstract
The significance of studying biological interactions of micro swimmers in a complex wavy canal with MHD effects lies in its potential to provide insight into the behavior and dynamics of microorganisms in natural environments that contain complex fluid flow and magnetic fields. Current investigation explores the biological interactions between micro swimmers and Cross fluid with inclined MHD effects in a complex wavy canal. There are several factors of medium for micro swimmers like nature, magnetic field, liquid rheology and position. These interactions are hereby witnessed by utilizing the Cross fluid along with Taylor swimming sheet model under the influence of porous and inclined magnetic effect. Furthermore, two-dimensional complex wavy cervical canal is being utilized at inclined angle. By help of lubrication assumption, reduction of momentum equation is made and hence fourth-order differential equation associated with boundary conditions is obtained. Bvp4c command in Matlab is utilized for this boundary value problem. Obtained bvp4c solution is verified with finite difference method and found smooth agreement. Magnetic force enhances the swimming speed and reduction is seen for the power dissipation and effective role is seen for swimming motion with cross fluid rheology. The channel walls (peristaltic nature) and porous medium can be utilized as alternative factors to control the speed of the propeller.
Similar content being viewed by others
Introduction
Cross fluid has well organized viscosity model and it has the capability to investigate the fluid flow at very high and very low shear rate. This model is often used to study the behavior of fluids that exhibit both fluid-like and solid-like properties. In the context of micro swimmers, the cross fluid model is particularly relevant as it can help explain the interactions between micro swimmers and the surrounding fluid. Micro swimmers, such as bacteria and other small organisms, are often found in complex fluid environments. These environments can include fluids that exhibit non-Newtonian behavior, such as the cross fluid model. When micro swimmers move through these fluids, they can experience resistance due to the elastic properties of the fluid. This can affect the speed and direction of the micro swimmer's movement and can lead to complex interactions with the fluid. Regarding time-dependent cross nanofluid in the presence of radiation and a heat-source sink, an experimental and theoretical issue is discussed by Haq et al.1. They discovered that Brownian motion and development in thermophoresis accelerate the rate of heat transfer. Magnetohydrodynamic Casson fluid, chemical reaction heat and mass transmission over a rotating wedge with slip, uniform heat source/sink and nonlinear thermal radiation was studied in Raju and Sandeep2. They also took into account the effects of cross-diffusion and viscous dissipation in order to control the momentum and concentration gradients. It has been discovered that raising the temperature jump parameter promotes a faster rate of heat transmission. Reddy et al.3 A theoretical analysis was conducted to demonstrate the impact of cross diffusion on magnetohydrodynamic Cattaneo-Christov flow over the three various geometries (cone, wedge and a plate). They discovered that the flows across a plate and a cone, respectively, have large mass and heat transfer coefficients. In the presence of hydrodynamics (MHD) and first order chemical reaction, Shahzad et al.4 explained the heat and mass transfer mechanism for non-Newtonian Cross fluid model passed a wedge. Alshomrani et al.5 created a mathematical model to represent the motion of a non-Newtonian magneto-cross nanofluid over the wedge, together with its mass and heat transfer rates, activation energy, and motile microbial inhabitants. They discovered that the thermal efficiency of conventional fluids can be improved by using nanoscale particles. Nanofluids are beneficial for a variety of applications, including heat transmission, cancer therapy, and hybrid power engines. Ashwinkumar et al.6 has numerically completed a computational analysis on the flow of hybrid nanofluid along three different flow surfaces with magnetized force. Cu + TiO2 + H2O hybridized nano liquid streams were studied side by side along cone, wedge, and plate surfaces. They discovered that flow along cone surfaces is more significantly affected by embedded variables than flow along wedge and plate surfaces. Ayub et al.7 investigated the cross nanofluid flow in the contracting/extracting cylinder and the MHD flow with stagnation point. Comprehensive investigation of the cross nanofluid stagnation point flow and second-order velocity slip phenomenon with a spectrum relaxation approach over the geometry of a porous medium was reported by Shah et al.8. The placement of an inclined magnetic field was used to determine the cross-nanofluids velocity. In Venkata et al.9, the effects of magnetohydrodynamic Casson fluid flow was investigated on a convective surface with cross diffusion, chemical reaction, and non-linear radiative heat. Cattaneo-Christov model for the boundary layer 2D Cross nanofluid flow over the surface of the parabola together with temperature dependent viscosity was used by Salahuddin et al.10 to examine the heat and mass diffusion. The impact of enthalpy changes and activation energy was also taken into consideration.
Objects that can physically move through fluid surroundings are called micro swimmers. Environmental systems, biology, chemistry, biomedical engineering, and other fields all depend on the diffusion of micro swimmers through porous media, and processes like biodegradation, bioremediation, and bio infection depend on the movement of these organisms. Varma and David11 investigated the dynamics of the constituent nanosized solid inclusions in a saturated 2D porous media. In porous environments, fluid suspensions containing movable micro swimmers, such as bacteria and active colloids, are frequently seen, according to Varma and David12. A micro swimmers dynamic in a pressure driven Poiseuille flow Choudhary et al.13 provided information on the influence of fluid inertia. Two-dimensional organic poly (heptazine imide) (PHI) carbon nitride microparticles were proposed by Sridhar et al.14 to function as light-driven micro swimmers in diverse ionic and biological conditions. Yang15 has described a numerical study of the diffusion of micro swimmers in porous media based on the run-and-tumble model. Singh et al.16 described the swimming behaviour of two opposing forms of biological micro swimmer (active colloid) populations.
Fundamentally, magnetohydrodynamics MHD is the study of magnetic fluid flow and the behaviour of electrically transmitted fluids. MHD flow, or Magnetohydrodynamic flow, refers to the study of the interaction between electrically conducting fluids and magnetic fields. In recent years, there has been a growing interest in studying MHD flow in relation to micro swimmers, which are small particles that are capable of self-propulsion. These micro swimmers can move through fluid by using various mechanisms such as flagella, cilia, or by means of chemical reactions. By introducing a magnetic field to the system, the motion of micro swimmers can be controlled, and their trajectories can be manipulated. This can have potential applications in fields such as microfluidics, drug delivery, and targeted therapy. However, the study of MHD flow in relation to micro swimmers is still in its early stages, and further research is needed to fully understand the complex interplay between fluid dynamics and magnetic fields. MHD is currently used in a variety of fields, including agriculture sciences, astrophysics, and geophysics17,18. Because of its useful industrial applications, such as MHD liquid metal flow management, cooling of nuclear reactors, high-temperature plasma, MHD power generators, and biological transportation, the MHD study is also quite popular in the technical world. Nazeer et al.19 investigated heat transmission in a magnetohydrodynamic multiphase flow induced by metachronal propulsion through porous media with thermal radiation. In porous media with inclined symmetric channels whose walls are caused by peristaltic motion within porous media. Awan et al20 made detailed discussion related to MHD effect and Hall current analysis by taking micropolar nanofluid flow between parallel plates. Peristaltic flow with internal heat generation and radially magnetic field effect is investigated by Qureshi et al21. Awan et al.22,23 presented the results of a numerical analysis of the effects of thermal radiation, chemical reaction, and heat source on MHD nanofluid flow through a nonlinear inclined stretching surface. They also investigated about second law analysis associated with effect of magnetic induction with attached geometry of ciliary induced peristaltic transport. Vishalakshi et al.24 investigates a steady-state, two-dimensional Rivlin-Ericksen magnetohydrodynamic (MHD) fluid flow caused by stretching a porous material sheet. Pattnaik et al.25 looked at how adding copper, aluminum oxide and single-wall carbon nanotubes to water-based magnetohydrodynamics (MHD) flow across a porous elastic surface affected the flow. The effects of viscous dissipation in the presence of a heat source or sink on MHD boundary layer flow and heat transfer towards a stretching sheet through a porous material were examined by Dessie and Naikoti26. Parveen et al27 made comprehensive analysis of chemotactic microorganisms and their thermophysical properties like viscous dissipation, slippage and Joule heating in rheology of bio-convective nano-liquid. Latest studies regarding MHD influences in application point of view are discussed by several studies28,29,30,31,32.
A solid structure with channels for fluid flow is the most straightforward way to think of a porous medium. In porous media a network of fluid-filled void spaces (pores) that are connected by relatively smaller throats permeate a solid medium material. There are many applicable examples of porous media, such as biological tissues, porous rocks, soil, and filtration media. In engineering, agriculture, geothermal sciences, and building, porous media has a variety of uses. Uniform elliptic estimates for several elliptic problems expressed in Lp spaces with a periodic porous media are given in Masmoudi33. Allaire34 determined the homogenization process' convergence for the Stokes equations with Dirichlet boundary conditions in a periodic porous media. Chen et al.35 investigated Pore-scale modelling of complicated transport phenomena in porous media. Pourrahmani36 assessed the effects of porous media within the Proton Exchange Membrane Fuel Cells (PEMFC) gas flow channel by considering the effects of their thickness, viscosity resistance, and current density.
Motivation
The study of biological interactions between micro swimmers and Cross fluid with inclined MHD effects in a complex wavy canal is a fascinating area of research that holds great potential for advancing our understanding of the natural world. This research topic brings together several important fields of study, including fluid dynamics, biology, and mathematics. By investigating the behavior of micro swimmers and their interaction with the Cross fluid in a complex wavy canal, researchers can gain insights into the complex physical and biological processes that govern the movement and behavior of these organisms. Furthermore, the inclusion of inclined MHD effects in this study adds an additional layer of complexity and interest, making this research topic all the more exciting and challenging. Ultimately, the findings from this research have the potential to improve our understanding of biological systems and could have important practical applications in fields such as biomedicine and environmental science.
Novelty
Previous literature tells the different studies regarding biological interaction of micro swimmers with different fluid models, but no study is lying in literature with cross fluid model. Recently, a novel study has investigated the effects of an inclined magnetic field on the biological interactions between micro swimmers and cross fluid in a complex wavy canal. Furthermore, two-dimensional complex wavy cervical canal has also been utilized at inclined angle. This study provides new insights into the complex dynamics of micro swimmers and their interactions with fluid flow in complex geometries, shedding light on potential applications in areas such as targeted drug delivery and microfluidic systems. The results of this study demonstrate the potential for using magnetic fields to control the motion and behavior of micro swimmers, opening up new avenues for future research in this exciting field.
Organization
This paper has been organized as section "Formulation of the model" establishes the mathematical and physical formulation, section "Mathematical model for magnetic swimming connected with porous medium" brings the detailed discussion about magnetic swimming model with porous medium, section "Solution methodology" gives solution methodology that is bvp4c and finite difference scheme, section "Graphical results" and "Statistical graphs" are launched for graphical/statistical results, section "Streamlines in both parts of the canal" depicts the detail of streamlines in assumed geometry and final section "Conclusion" is herby puts the finding about study.
Formulation of the model
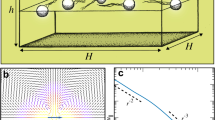
A magnetically driven undulating sheet is seen swimming through a Cross fluid that is contained between two inclined active walls in Fig. 1. In the current work, we additionally take the impacts of porous media into account. The micro swimmer is moving in an inclined negative X-direction as a result of its waved surface. Additionally, the swimming hydrodynamics are superimposed with a constant-intensity magnetic field that is applied in the opposite direction of Y.

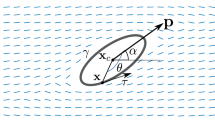
Physical and geometrical representation of assumed problem.
There is assumed that fixed frame of reference and it is also made assumption that complex waves at lower walls, upper walls and undulating surface is \(\left( {Y = H_{2} } \right)\),\(\left( {Y = H_{1} } \right)\) and \(\left( {Y = H_{s} } \right)\) respectively, and they are further defined as under,
In above mathematical relation \(C - U_{S}\) represents speed of the wave length which is related to the organism of micro swimmer.
Component of fluid velocity are constrained with below mathematical relation
Force will be vanished in the absence of free swimmer case, hence as result the net calculated force acting on organism of micro swimmer will be zero. This phenomenon is called dynamic equilibrium and its mathematics37,38 will take place as:
Governing equations relevant to this physical problem take place as under;
Mathematical form of tensor of Cross fluid model is mentioned39,40,41,42 as:
where \(\Pi^{ \pm }\) is given as:
Wave frames and connected Galilean transformations are written as under:
Mathematical model for magnetic swimming connected with porous medium
Flow is influenced by motion of micro swimmer organism and their combined relationship and mathematically velocity is denoted as under:
Here body force is appeared as magnetic field and gravity, hence combination of their mutual effect. Their relationship is expressed mathematically as \(B = \left[ {\sigma_{m} B_{0}^{2} v_{1}^{ \pm } + \rho g\,\sin \,\alpha ,\,\,\, - \rho g\,\cos \,\alpha ,\,\,\,0} \right].\)
Furthermore, \(R^{ \pm } = \frac{{\mu_{0} }}{k}V^{ \pm }\) represents the mathematics of induced by porous medium and R ¼ lK0 V is drag induced by porous medium.
Application of transformation in view of above mentioned observation the governing equation take the form:
As accordance with previous the stress Eq. (9) gives:
where,
Subsequent analysis is made with the help of following normalized variables
Relationship between normalized velocity components and stream function is expressed in following manner,
Feeding the requirements of (13–18) we get below system, and also neglection is made with superscript *:
Mathematics of non-dimension second invariant related to deformation rate tensor:
After applying the wavelength assumption and wavelength assumption1,2,3,4,5,6,7,8,9,11,33,34,35,36,37,38,39 in Eqs. (23–26)
After combination of above mentioned expressions we get:
Feeding stream function, dimensionless variables and Galilean transformation, and dimensionless boundary conditions:
The standard definition of flow rate across two halves of the channel in mathematical form is given by:
Utilizing the long wavelength approximation and stress–strain relation with force balance condition (6) we get:
where \([S_{xy} (U_{S} ,F;x)]_{{y = H_{S} }} = \left. {S_{xy}^{ + } (U_{S} ,F;x)} \right|_{{y = H_{S} }} \left. { - S_{xy}^{ - } (U_{S} ,F;x)} \right|_{{y = H_{S} }}\) and pressure gradient \(\left[ {\frac{{d_{p} (U_{S} ,F;x)}}{{d_{x} }}} \right] = \frac{{d_{p}^{*} (U_{S} ,F;x)}}{{d_{x} }} - \frac{{d_{{p^{ - } }} (U_{S} ,F;x)}}{{d_{x} }}.\)
When it is considered that there is free channel, then pressure rise per wave length \(\Delta P_{\lambda }\) becomes zero, i.e.
After seeing and utilizing the assumption of lubrication, the above mentioned expression takes the form:
Graphical results
The study on the biological interactions between micro swimmers and cross fluid with inclined MHD effects in a complex wavy canal provides interesting insights into the behavior of microorganisms in fluid environments. The numerical simulations conducted in this study reveal that the presence of a wavy canal can significantly impact the swimming behavior of micro swimmers. The results show that the amplitude and wavelength of the waves in the canal can affect the movement of microorganisms in the fluid. In addition, the study also demonstrates that the presence of a magnetic field can further alter the swimming behavior of microorganisms. The inclination of the magnetic field also plays a significant role in determining the behavior of microorganisms (Figs. 2, 3). The study found that when the magnetic field was inclined at an angle of 30°, 45°, 60°, the microorganisms experienced a significant increase in their swimming speed. Furthermore, the study provides valuable insights into the complex interplay between microorganisms and their surrounding fluid environments. The results suggest that microorganisms are capable of adapting their swimming behavior to their surrounding fluid environments. This adaptation is critical for the survival and successful movement of microorganisms in a complex fluid environment. Further specific results are elaborated in Figs. 4, 5, 6, 7, 8, 9, 10 and 11.

Influence of Darcy number Da on organisms swimming speed.

Impact of inclined angle \(\omega \) on organisms swimming speed.

Impact of inclined angle \(\omega \) on powered transferred by swimmers.

Impact of inclined angle \(\omega \) on organisms swimming speed.

Impact of inclined angle \(Da\) on flow rate of swimming microorganisms.

Impact of Da on power transferred by swimmers ψ.

Impact of H on organisms swimming speed.

Impact of H on power transferred by swimmers.

Impact of We on \(\psi \) in the presence of a positive variation in H.

Impact of We on \(\psi \) in the presence of an amplification in \({a}_{1}\).
Graphical representation of various parameters on different physical quantities are portrayed through Figs. 4, 5, 6, 7, 8, 9, 10 and 11. Figures 4 and 5 are designed to study the impact of Darcy number and inclined angle on the organisms swimming speed. It is noticed that the organisms swimming speed diminishes by the virtue of a magnification in Da. The flow rate of the microorganisms is related to the change in pressure. The pressure of swimming microorganism’s decreases owing to an amplification in Da produces a negative impact on the power needed by the swimmer and reduces organisms swimming speed \({U}_{s}\). Figure 4 illustrates the performance of inclined angle \(\omega \) on the organisms swimming speed \({U}_{s}.\) It is observed that the moving over an inclined surface accelerates slowly due to a magnification in \(\omega \). The components of the force acting on swimming microorganisms decreases which eventually lessens the power of microorganisms flow through the canal. Force is inversely related to the inclined. A variation in inclined angle abates the uneven force applied on the swimming microorganisms and debacles the organisms speed \({U}_{s}.\) The influence of inclination angle \(\omega \) on the power transferred by the swimmer is delineated in Fig. 5. It is observed that that a magnification \(\omega \) depreciates the force phenomenon and swimming microorganism’s require more power to flow through the wavy canal which brings about an enhancement in power transferred by the swimmer \(\psi \). It is observed from the Fig. 6 that the inclined angle \(\omega \) brings about a positive change in flow rate F. It is well established that the acceleration of swimming organisms increases by the virtue of a magnification in \(\omega \). The component of the forces acting parallel to the swing flow of microorganisms increases in contrast to normal forces acting perpendicular to the swim flow direction of the microorganisms. The parallel forces are responsible for an enhancement in acceleration and inclined angle \(\omega \). As a result, a positive variation in \(\omega \) amplifies the flow rate of the swimming microorganisms F. It can be seen from Fig. 7 that the flow rate of the swimming microorganisms escalates by the virtue of a magnification Darcy parameter Da. According to Darcy law the flow rate is directly linked with the pressure gradient. Darcy law is linked with the porosity phenomenon. The speed of the swimming microorganisms depreciates when moving through a porous wavy canal. The porosity acts like a resistive medium which lessens the swimming microorganisms speed and power of the swimming microorganisms as well. That’s why an amplification in Da depreciates the swimming microorganisms flow rate F phenomenon. The impact of Darcy effect on power transferred by swimmer \(\psi \) is illustrated in Fig. 8. As discussed above the speed of swimming microorganisms diminishes as a result of an increment in porosity phenomenon. The porous inside the medium lessens swimming speed, escalates flow rate magnitude, and has minor impact on the amount of power consumed by the swimmer. That’s why a swimming motion of spermatozoa amplifies the power delivered by swimmer \(\psi .\) The effect of Hartmann number H on the flow rate F and organisms swimming speed \({U}_{s}\) due to a variation in Weissenberg number We is displayed in Fig. 9. It is quite clear that a magnification in H causes a magnification in F and \({U}_{s}\). The electric current in the presence of magnetic field generates a force termed as Lorentz force. This force is resistive force. Weissenberg number is actually the relaxation time, the time required by the fluid to relax in order to regain its original shape. The fluid behavior is shearing thickening in the case of We < 2 and shear thickening in the case of We > 2. The viscosity of the fluid decrease owing to a magnification in We < 2 which depreciates the Lorentz force. The power as well as the speed of swimming spermatozoon’s increases when moving through a wavy canal. That’s why a magnification in H in the presence of We amplifies the flow rate of swimming microorganisms F and speed of swimming microorganisms \({U}_{s}\)
Statistical graphs
The influence of We on power delivered by swimmer \(\psi \) due to a variation in parameter H is portrayed in Fig. 10. Shear thickening behavior is reported in the case of a positive change in We which escalates the fluid viscosity. The electric conducting with the inclusion of swimming organisms passing through a wavy canal produces a force called Lorentz force which lessens the power of swimming microorganisms. As a result, power delivered by microorganisms diminishes. Figure 11 is designed to study the impact of We on power delivered by the swimmer \(\psi \) in the case of wave amplitude in channel walls parameter \({a}_{1}\). It is well established that the power delivered by microorganisms amplifies in the case of wavy channel in contrast to a rigid channel. Amplification in amplitude of the waves enhances the power of microorganisms moving through the channel walls in comparison to the rigid walls. The impact of We on power delivered by the swimmer \(\psi \) owing to a magnification in Darcy parameter is highlighted in Fig. 12. Darcy effect linked the flow rate with the pressure gradient. A positive variation in Darcy parameter produces a resistive force which diminishes the power delivered by microorganisms. A positive variation in Da increases the relaxation time of fluid which diminishes the power delivered by swimmer. The \(\psi \) magnifies in the case of Da = 0 which reduces the fluid viscosity and amplifies the power of the microorganism. It is evident that an organism flowing inside a medium having pores in it uses more energy than an organism moving through a non-porous.

Influence of We on \(\psi \) as a result of a magnification in Da.
Streamlines in both parts of the canal
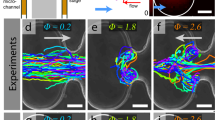
The effects of magnetic field and phase difference on the streamline topologies are highlighted in Figs. 13, 14, 15 and 16. The other variables are all fixed. The surrounding fluid becomes caught when the organism pushes more quickly than it should when it is out of phase with the channel walls. The level curves are comparable in both regions for \(\Phi \) =0 and H = 0 because there is no circulation zone, but the streamlines for (\(\Phi \) =\(\frac{\pi }{4}\)) and H = 0 reveal a different tendency on the top and lower sides of the organism (as shown in Fig. 14). Figure 15 is displayed for a significant degree of magnetic force and we can see that circulating zones form in the empty areas, in contrast to Fig. 13 (without MHD and no phase difference). The strength of the circulatory zones diminishes as the MHD symptoms rise (see Figs. 14 and 16 for \(\Phi =\frac{\pi }{4}\)).

Impact of magnetic field on stream line.

Impact of phase difference on stream line.

Impact of magnetic field on streamline.

Impact of magnetic field on streamline.
Conclusion
Problem related to magnetic swimming taking very low Reynolds number and associated with mathematical model of Cross fluid is discussed here. Key findings are given as under:
-
1.
Applied magnetic force enhances the swimming speed and reduction is seen for the power dissipation.
-
2.
Effective role is seen for swimming motion with cross fluid rheology.
-
3.
Without considering the porous medium, with less amount of work done, the microorganism can easily obtain that same speed.
Future directions
This paper is related with study of the behavior and interactions of microorganisms or micro swimmers (such as bacteria, algae, or sperm cells) in fluid environments that are influenced by magnetic fields and the geometry of the channels in which they move. Here are some possible future research directions that could be pursued in this field:
-
1.
Investigation of the effects of different fluid flow regimes: Researchers could explore how different flow regimes affect the behavior and interactions of micro swimmers, and how this is modified by the presence of a magnetic field with maxwell fluid model.
-
2.
Study of the role of surface effects: Researchers could investigate how the wavy geometry of the channel influences the dynamics of the micro swimmers and how this is further affected by the presence of chemical processes.
-
3.
Exploration of the impact of MHD effects: Researchers could study the impact of MHD effects on the behavior of micro swimmers in different fluid environments as well as the interplay between these effects and other external factors such as the presence of obstacles or external forces.
-
4.
Development of mathematical models: Researchers could develop and refine these models to gain insights into the underlying physical mechanisms that govern micro swimmer behavior, as well as to make predictions about the effects of different parameters on this behavior using artificial neural network.
Data availability
All data generated or analyzed during this study are included in this published article.
Change history
10 July 2024
This article has been retracted. Please see the Retraction Notice for more detail: https://doi.org/10.1038/s41598-024-66666-x
Abbreviations
- Us:
-
Organisms swimming speed (m/s)
- X, Y:
-
Fixed frame Cartesian coordinate (N/A)
- \(x,y\) :
-
Cartesian coordinate of wave frame (N/A)
- Superscript (+):
-
Upper Half \(H_{s} \le Y \le H_{1}\) (N/A)
- Superscript (−):
-
Lower Half \(H_{2} \le Y \le H_{s}\) (N/A)
- V:
-
Fluid velocity vector (m/s)
- \(V_{1} ,\,\,\,V_{2}\) :
-
Fixed frame velocity components (m/s)
- \(v_{1} ,\,\,\,v_{2}\) :
-
Wave frame velocity components (m/s)
- \(g\) :
-
Gravitational force (m/s2)
- \(G\) :
-
Gravitational parameter (–)
- \(F\) :
-
Flow rate of the fluid (–)
- \(B\) :
-
Body force (N)
- \(R\) :
-
Resistance due to porous medium (Ohm)
- \(\alpha\) :
-
Inclination angle (–)
- \(\mu_{o}\) :
-
Zero-shear-rate-viscosity (Pa s)
- \(\gamma\) :
-
Ratio between minimum and maximum viscosity (–)
- \(\Gamma\) :
-
Time constant (1/s)
- \(\Psi\) :
-
Stream function (–)
- \(\Omega\) :
-
Under relaxation parameter (–)
- Bo:
-
Magnetic field power (tesla)
- P:
-
Fixed frame pressure (Pascal)
- p:
-
Wave frame pressure (N/m2)
- S:
-
Extra stress tensor (–)
- A1:
-
First Rivlin–Ericksen tensor (Unit tensor)
- We :
-
Weissenberg number (–)
- Re:
-
Reynolds number (–)
- H:
-
Hartmann number (–)
- Da:
-
Darcy number (–)
- \(\lambda\) :
-
Wavelength (m)
- \(\Phi\) :
-
Phase difference \(0 \le \phi \le \pi\)(–)
- \(\rho\) :
-
Density of fluid (kg/m3)
- K:
-
Permeability (Faraday/m)
- \(\sigma_{m}\) :
-
Electrical conductivity (S/m)
- \(\mu_{\infty }\) :
-
Infinite-shear-rate-viscosity (Pa s)
- \(\Pi\) :
-
Second invariant (N/A)
- \(\delta\) :
-
Wave number with zero dimension (–)
- \(\xi_{j}\) :
-
Unit normal vector to organism (N/A)
- \(\wp\) :
-
Power deliver by the swimmer (W)
References
Haq, I. et al. Characteristics of chemical processes and heat source/sink with wedge geometry. Case Stud. Thermal Eng. 14, 100432 (2019).
Raju, C. S. K. & Sandeep, N. MHD slip flow of a dissipative Casson fluid over a moving geometry with heat source/sink: A numerical study. Acta Astronaut. 133, 436–443 (2017).
Reddy, A., Ramana, J. V., Sugunamma, V. & Sandeep, N. Cross diffusion effects on MHD flow over three different geometries with Cattaneo-Christov heat flux. J. Mol. Liquids 223, 1234–1241 (2016).
Shahzad, M., et al. Computational investigation of magneto-cross fluid flow with multiple slip along wedge and chemically reactive species. Res. Phys. 16, 102972 (2020).
Alshomrani, A.S., Ullah, M.Z., & Baleanu, D. Importance of multiple slips on bioconvection flow of cross nanofluid past a wedge with gyrotactic motile microorganisms. Case Stud. Therm. Eng. 22, 100798 (2020).
Ashwinkumar, G. P., Girinath Reddy, M., Sandeep, N. Convective heat transfer in MHD Cu-TiO2-H2O cross nanofluid flow over three diverse surfaces. Proc. Inst. Mech. Eng. Part E J. Process Mech. Eng. 09544089221076696 (2022).
Ayub, A., et al. Analysis of the nanoscale heat transport and Lorentz force based on the time-dependent Cross nanofluid. Eng. Comput. 1–20 (2022).
Shah, S.L., et al. Magnetic dipole aspect of binary chemical reactive Cross nanofluid and heat transport over composite cylindrical panels. Waves Random Complex Media 1–24 (2022).
Venkata Ramudu, A. C. et al. Impact of Soret and Dufour on MHD Casson fluid flow past a stretching surface with convective–diffusive conditions. J. Therm. Anal. Calorim. 147(3), 2653–2663 (2022).
Salahuddin, T. et al. Analysis of transport phenomenon in cross fluid using Cattaneo-Christov theory for heat and mass fluxes with variable viscosity. Int. Commun. Heat Mass Transfer 129, 105664 (2021).
Varma, A., & Saintillan, D. Microswimmer suspensions in 2D random porous media. APS Division of Fluid Dynamics Meeting Abstracts (2021).
Varma, A., & Saintillan, D. Active particle transport in disordered porous media. Bull. Am. Phys. Soc. (2022).
Choudhary, A., et al. How inertial lift affects the dynamics of a microswimmer in Poiseuille flow. Commun. Phys. 5(1), 1–9 (2022).
Sridhar, V., et al. Biocompatible carbon nitride-based light-driven microswimmer propulsion in biological and ionic media with responsive on-demand drug delivery. arXiv preprint arXiv:2103.17026 (2021).
Yang, C. Diffusion of run-and-tumble microswimmers in porous media (University of California, 2020).
Singh, A.V., et al. Mechanical coupling of puller and pusher active microswimmers influences motility. Langmuir 36(19), 5435–5443 (2020).
Ahammad, M. U. & Mollah Md, S. H. Numerical study of MHD free convection flow and mass transfer over a stretching sheet considering Dufour & Soret effects in the presence of magnetic field. Int. J. Eng. Technol. 11(05), 4–11 (2011).
Alinejad, J., & Samarbakhsh, S. Viscous flow over nonlinearly stretching sheet with effects of viscous dissipation. J. Appl. Math. (2012).
Nazeer, M., et al. Heat transmission in a magnetohydrodynamic multiphase flow induced by metachronal propulsion through porous media with thermal radiation. Proc. Inst. Mech. Eng. Part E J. Proc. Mech. Eng. 09544089221075299 (2022).
Awan, S. E. et al. Numerical computing paradigm for investigation of micropolar nanofluid flow between parallel plates system with impact of electrical MHD and Hall current. Arab. J. Sci. Eng. 46, 645–662 (2021).
Qureshi, I. H. et al. Influence of radially magnetic field properties in a peristaltic flow with internal heat generation: Numerical treatment. Case Stud. Therm. Eng. 26, 101019 (2021).
Awan, S. E., Raja, M. A. Z., Mehmood, A., Niazi, S. A. & Siddiqa, S. Numerical treatments to analyze the nonlinear radiative heat transfer in MHD nanofluid flow with solar energy. Arab. J. Sci. Eng. 45, 4975–4994 (2020).
Awan, S. E. et al. Numerical treatment for dynamics of second law analysis and magnetic induction effects on ciliary induced peristaltic transport of hybrid nanomaterial. Front. Phys. 9, 631903 (2021).
Vishalakshi, A. B., Mahabaleshwar, U. S., & Sheikhnejad, Y. Impact of MHD and mass transpiration on Rivlin–Ericksen liquid flow over a stretching sheet in a porous media with thermal communication. Transp. Porous Media 142(1), 353–381 (2022).
Pattnaik, P. K., et al. Analysis of metallic nanoparticles (Cu, Al2O3, and SWCNTs) on magnetohydrodynamics water-based nanofluid through a porous medium. J. Math. (2022).
Dessie, H. & Kishan, N. MHD effects on heat transfer over stretching sheet embedded in porous medium with variable viscosity, viscous dissipation and heat source/sink. Ain Shams Eng. J. 5(3), 967–977 (2014).
Parveen, N., Awais, M., Awan, S. E., Shah, S. A., Yuan, A., Nawaz, M., & Malik, M. Y. Thermophysical properties of chemotactic microorganisms in bio-convective peristaltic rheology of nano-liquid with slippage, Joule heating and viscous dissipation. Case Stud. Therm. Eng. 27, 101285 (2021).
Awan, S. E., Awais, M., Qayyum, A., Rehman, S. U., Khan, A., Ali, H., & Raja, M. A. Z. Numerical computing paradigms for the dynamics of squeezing rheology of third grade fluid. Therm. Sci. 24(6 Part B), 4173–4182 (2020).
Darvesh, A., Altamirano, G. C., Sánchez‐Chero, M., Zamora, W. R., Campos, F. G., Sajid, T., & Ayub, A. Variable chemical process and radiative nonlinear impact on magnetohydrodynamics Cross nanofluid: An approach toward controlling global warming. Heat Transfer.
El Sayed, M., Sajid, T., Jamshed, W., Shah, S. Z. H., Eid, M. R., Ayub, A., & Maquen-Niño, G. L. E. Cross electromagnetic nanofluid flow examination with infinite shear rate viscosity and melting heat through Skan-Falkner wedge. Open Phys. 20(1), 1233–1249 (2022).
Botmart, T., Ayub, A., Sabir, Z., weera, W., Sadat, R., & Ali, M. R. Infinite shear rate aspect of the cross-nanofluid over a cylindrical channel with activation energy and inclined magnetic dipole effects. Waves Random Complex Med. 1–21 (2022).
Ayub, A., Sajid, T., Jamshed, W., Zamora, W. R. M., More, L. A. V., Talledo, L. M. G., & Krawczuk, M. Activation energy and inclination magnetic dipole influences on carreau nanofluid flowing via cylindrical channel with an infinite shearing rate. Appl. Sci. 12(17), 8779 (2022).
Masmoudi, N. Some uniform elliptic estimates in a porous medium. C.R. Math. 339(12), 849–854 (2004).
Allaire, G. Homogenization of the Stokes flow in a connected porous medium. Asymptot. Anal. 2(3), 203–222 (1989).
Chen, L., et al. Pore-scale modeling of complex transport phenomena in porous media. Prog. Energy Combust. Sci. 88, 100968 (2022).
Pourrahmani, H. Evaluation Criterion of Proton Exchange Membrane (ECPEM) fuel cells considering inserted porous media inside the gas flow channel. Appl. Therm. Eng. 203, 117952 (2022).
Asghar, Z., Ali, N., Sajid, M. & Bég, O. A. Magnetic microswimmers propelling through biorheological liquid bounded within an active channel. J. Magn. Magn. Mater. 486, 165283 (2019).
Ansari, A. R., Siddiqui, A. M. & Hayat, T. An analysis of the swimming problem of a singly flagellated micro-organism in an MHD fluid. Nonlinear Dyn. 51(3), 477–481 (2008).
Hosseinzadeh, K. et al. Investigation of cross-fluid flow containing motile gyrotactic microorganisms and nanoparticles over a three-dimensional cylinder. Alex. Eng. J. 59(5), 3297–3307 (2020).
Shah, S. L., Ayub, A., Dehraj, S., Wahab, H. A., Sagayam, K. M., Ali, M. R., & Sabir, Z. Magnetic dipole aspect of binary chemical reactive Cross nanofluid and heat transport over composite cylindrical panels. Waves Random Complex Media 1–24 (2022).
Ayub, A. et al. Analysis of the nanoscale heat transport and Lorentz force based on the time-dependent Cross nanofluid. Eng. Comput. 1, 1–20 (2022).
Shah, S. Z. H. et al. Insight into the dynamics of time-dependent cross nanofluid on a melting surface subject to cubic autocatalysis. Case Stud. Therm. Eng. 27, 101227 (2021).
Awan, S. E., Awais, M., Raja, M. A. Z., Rehman, S. U. & Shu, C. M. Bayesian regularization knack-based intelligent networks for thermo-physical analysis of 3D MHD nanofluidic flow model over an exponential stretching surface. Eur. Phys. J. Plus 138(1), 2 (2023).
Raja, M. A. Z., Sabati, M., Parveen, N., Awais, M., Awan, S. E., Chaudhary, N. I., & Alquhayz, H. Integrated intelligent computing application for effectiveness of Au nanoparticles coated over MWCNTs with velocity slip in curved channel peristaltic flow. Sci. Rep. 11(1), 22550 (2021).
Awan, S. E., Raja, M. A. Z., Awais, M., & Bukhari, S. H. R. Backpropagated intelligent computing networks for 3D nanofluid rheology with generalized heat flux. Waves Random Complex Media 1–31 (2022).
Raja, M. A. Z., Awan, S. E., Shoaib, M. & Awais, M. Backpropagated intelligent networks for the entropy generation and joule heating in hydromagnetic nanomaterial rheology over surface with variable thickness. Arab. J. Sci. Eng. 47(6), 7753–7777 (2022).
Awais, M., Bibi, M., Raja, M. A. Z., Awan, S. E. & Malik, M. Y. Intelligent numerical computing paradigm for heat transfer effects in a Bodewadt flow. Surf. Interfaces 26, 101321 (2021).
Awan, S. E., Raja, M. A. Z., Awais, M. & Shu, C. M. Intelligent Bayesian regularization networks for bio-convective nanofluid flow model involving gyro-tactic organisms with viscous dissipation, stratification and heat immersion. Eng. Appl. Comput. Fluid Mech. 15(1), 1508–1530 (2021).
Shoaib, M., Raja, M. A. Z., Khan, M. A. R., Farhat, I. & Awan, S. E. Neuro-computing networks for entropy generation under the influence of MHD and thermal radiation. Surf. Interfaces 25, 101243 (2021).
Ali, M., Shahzad, M., Sultan, F., Khan, W. A. & Shah, S. Z. H. Characteristic of heat transfer in flow of Cross nanofluid during melting process. Appl. Nanosci. 10, 5201–5210 (2020).
Rasool, G. et al. Spectral Relaxation Methodology for Chemical and Bioconvection Processes for Cross Nanofluid Flowing around an Oblique Cylinder with a Slanted Magnetic Field Effect. Coatings 12(10), 1560 (2022).
Botmart, T. et al. The inclination of magnetic dipole effect and nanoscale exchange of heat of the Cross nanofluid. Waves Random Complex Media 1, 1–16 (2022).
Wang, F. et al. Melting and entropy generation of infinite shear rate viscosity Carreau model over Riga plate with erratic thickness: A numerical Keller Box approach. Waves Random Complex Media 1, 1–25 (2022).
Acknowledgements
All the authors are greatly obliged and thankful to the University of Management and Technology Lahore, Pakistan for facilitating and supporting the research work.
Author information
Authors and Affiliations
Contributions
A.A., S.Z.H.S. and M.I.A., formulate the problem, A.A., S.Z.H.S. wrote the main manuscript text A.A., M.Y.A. and S.M.E. graphs and discussion A.A., S.Z.H.S., M.I.A., M.Y.A., M.A.E.R. and S.M.E. reviewed the manuscript A.A., M.I.A., M.A.E.R. prepared the revised version and response to the reviewers comments and all the authors have approved the final version for submission.
Corresponding author
Ethics declarations
Competing interests
The authors declare no competing interests.
Additional information
Publisher's note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
This article has been retracted. Please see the retraction notice for more detail: https://doi.org/10.1038/s41598-024-66666-x"
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article's Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article's Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Ayub, A., Shah, S.Z.H., Asjad, M.I. et al. RETRACTED ARTICLE: Biological interactions between micro swimmers and cross fluid with inclined MHD effects in a complex wavy canal. Sci Rep 13, 4712 (2023). https://doi.org/10.1038/s41598-023-31853-9
Received:
Accepted:
Published:
DOI: https://doi.org/10.1038/s41598-023-31853-9
