
Abstract
Physics informed neural network (PINN) demonstrates powerful capabilities in solving forward and inverse problems of nonlinear partial differential equations (NLPDEs) through combining data-driven and physical constraints. In this paper, two PINN methods that adopt tanh and sine as activation functions, respectively, are used to study data-driven solutions and parameter estimations of a family of high order KdV equations. Compared to the standard PINN with the tanh activation function, the PINN framework using the sine activation function can effectively learn the single soliton solution, double soliton solution, periodic traveling wave solution, and kink solution of the proposed equations with higher precision. The PINN framework using the sine activation function shows better performance in parameter estimation. In addition, the experiments show that the complexity of the equation influences the accuracy and efficiency of the PINN method. The outcomes of this study are poised to enhance the application of deep learning techniques in solving solutions and modeling of higher-order NLPDEs.
Similar content being viewed by others

Introduction
Nonlinear partial differential equations (NLPDEs) constitute an important branch of modern mathematics. Many significant problems in natural sciences and engineering can be formulated as the study of nonlinear partial differential equations, both in theoretical research and practical applications. NLPDEs play a crucial role in fields such as mechanics, control processes, ecosystems, economics and finance, chemical cycle systems, and epidemiology. As research progresses, scientists have discovered that nonlinear effects must also be taken into account for some problems previously treated with linear differential equations.
The study of NLPDEs can generally be categorized into three major types: quantitative research, qualitative research, and numerical solution research. Quantitative research aims to find exact analytic solutions of equations with certain scientific significance. Due to the complexity caused by nonlinearity and other factors, there is no universally effective method for the exact analytic solution of NLPDEs. Common methods currently used include inverse scattering transform, Bäcklund transformation, Darboux transformation, Hirota bilinear method, Painlevé finite expansion method, Lie group method, and so on1,2,3,4,5,6. In recent years, there have been many new and valuable achievements in the field of analytical solutions of NLPDEs7,8,9,10,11. Qualitative research analyzes the existence, uniqueness, periodic branching, chaos, and other characteristics of the models without obtaining analytic solutions. Numerical solution research, on the other hand, verifies the correctness of theoretical analysis through numerical solutions when no analytical solution is available, making it another important research branch of NLPDEs. Commonly used methods include finite difference methods12, finite element methods13, and spectral methods14, etc.
In the mid-1980s, the back-propagation algorithm and its development caused the second wave of research in the field of artificial neural networks(ANN)15. ANN was applied in many fields and showed their powerful capabilities in the last half century16,17,18,19,20. In 1981, a paper published by Rall proposed the automatic differential method21, which can use the chain rule to accurately calculate the derivative and can differentiate the entire neural network model according to the input coordinates and network parameters of the neural network, thus replacing the complex gradient calculation in the partial differential equation, and laying the foundation for the solution of the partial differential equation based on artificial neural network. Since the 1990s, scholars began to study the mathematical theories and methods of solving partial differential equations using neural networks and achieved a series of valuable results22,23,24,25,26. The data-driven artificial neural network solving algorithm relies on data labels, leading to some problems such as poor generalization ability. Scholars have begun to explore network frameworks that combine data-driven approaches with the structured prior information implicit in partial differential equations, known as the method of physics-informed constraints. The deep Galerkin method proposed by Sirignamo et al.27 is the first attempt in this direction, and they provide the theorem for neural network approximation under physical constraints. Raissi et al.28 introduced the physics informed neural network (PINN) under physical constraints, combining data-driven and physical constraint methods to address the weak generalization ability of data-driven approaches and proposing a new approach for modeling and solving partial differential equations.
The PINN algorithm has attracted wide attention from researchers since it was proposed29,30,31. For example, Chen’s team focuses on the local wave phenomenon in nonlinear integrable systems, and they successfully obtained data-driven solutions for local waves using the PINN algorithm32,33,34. Yan’s team uses the PINN algorithm to study several variants of the nonlinear Schrödinger equation (NLS), including the Hirota equation, and explored the data-driven solutions of these equations and the associated inverse problems35,36,37. Mishra et al. gave data-driven solutions for some higher-order nonlinear dispersion equations using the PINN algorithm and provided a theoretical analysis of the error estimates of the equations38. Some research on the improvement of the PINN algorithm has also received attention39.
The Korteweg-de Vries (KdV) family of equations is an important NLPDE. The original equation was derived by Korteweg and de Vries in 1895 to describe shallow water waves with long wavelengths and small amplitudes40. The KdV equation simulates various important finite amplitude dispersion wave phenomena in nonlinear evolution equations. It is also used to describe some important physical phenomena, such as acoustic waves in harmonic crystals and ion-acoustic waves in plasmas. As research progresses, a batch of new KdV equations has been obtained by modifying and extending the third-order original KdV equation. Additionally, higher-order KdV equations of order 5 and above have appeared in scientific applications and practical problems. These models have been favored by scholars, and researchers in the field of mathematics and physics have carried out in-depth research on these models and obtained a large number of valuable results41,42,43,44,45,46,47.
The main work in this paper is to obtain predictive solutions and predictive parameters of several higher-order KdV equations by constructing a suitable PINN framework and obtaining a reliable network through data training. Previous studies have found that using the sine function as the activation function can solve some problems that exist in PINN with the traditional tanh function, for example, the asymptotic flattening output, and can also improve the convergence speed to a certain extent48. Inspired by this, an improvement strategy is proposed to evaluate the performance of the standard PINN, i.e., replacing tanh with sine as activation function in the PINN algorithm. A family of KdV equations, including 5 equations, is studied on two PINN frameworks with sine and tanh activation functions, respectively. Seven distinguishing solutions and six parameters are obtained successfully on the two proposed PINN frameworks, and the experimental results are mainly presented in the form of graphs and tables. Furthermore, we explore the effect of PINN on fitting the solutions and the unknown parameters of NLPDEs based on these experiment results. These results indicate that the sine activation function really has better performance in both predictive solutions and parameter estimation problems. We also analyze the influence of the complexity of equations and solutions on the data-driven problem by the experimental results.
The structure of this paper is as follows: In “Main ideas of the methods” section, we present a detailed description of the PINN algorithm, discussing its application in solving forward and inverse problems of NLPDEs. We also analyze and discuss three different activation functions and account for the details of the computational platform. In “Data-driven solution” section, by comparing the standard PINN algorithm and the PINN algorithm using sine function as activation function, we conduct a comprehensive study on five high-order Korteweg-de Vries (KdV) equations: a three-order KdV equation, a K(2, 2) equation, a mKdV equation, a five-order KdV equation (CDG) and a seven-order KdV equation (Lax’s). In “Data-driven parameter estimation of NLPDEs” section, the PINN algorithm with sine activation function shows its obvious advantage in the inverse problem of the NLPDEs. We also analyzed the possible cause of the special case. Finally, in “Discussion and Conclusion” section, we provide a summary of the work in this paper and give future research directions.
Main ideas of the methods
We discuss the following general form of \((n+1)\) dimensional partial differential equation
together with the initial and boundary conditions
where u(x, t) represents the undetermined solution, \(\mathscr {N}[\cdot ]\) is a nonlinear differential operator, and \(\Omega\) is a subset of \(\mathbb {R}^{d}\).
PINN for solving forward and inverse problems of NLPDEs
PINN is a type of neural network whose central idea is to encode a model, such as a PDE, as a component of the neural network itself. A L layers feed-forward neural network consisting of an input layer, L-1 hidden layers, and an output layer is considered, where the lth layer (l= 1,2,... L − 1) has \(N_{l}\) neurons. The connection between the two layers is established by a linear transformation \(\mathscr {F}_{l }\) and nonlinear activation function \(\sigma (\cdot )\), then the input of layer L can be shown as:
where the input data \({\alpha }^{[0]}= \textbf{x}_0\) is the transpose of the vector \((x_0, t_0)\), \({\alpha }^{[l]}, l=2,3,...L-1\) represents the output of layer l, \(\mathscr {F}_{l }=\textbf{W}^{[l]}{\alpha }^{[l-1]} + \textbf{b}^{[l]}\) represents the input of layer l, and the weight matrix \(\textbf{W}^{[l]}\in \mathbb {R}^{\textbf{N}_{l }\times \textbf{N}_{l -1}}\) and bias vector \(\textbf{b}^{[l]}\in \mathbb {R}^{\textbf{N}_{l }}\) are trainable parameters. Let \(\varvec{\theta } = \{\textbf{W}, \textbf{b}\}^{L}_{l=1}\) represents the set of parameters to be learned in all the weight matrices and bias vectors of the network. Therefore, the connection relationship between input \(\textbf{x}_0\) and output \(u(\textbf{x}_0;\varvec{\theta })\) is
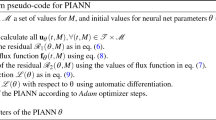
In “Data-driven solution” section, the standard PINN method and the improved method are used to compare the accuracy and efficiency in solving five KdV equations. The two methods use the hyperbolic tangent (\(\tanh\)) function and sine function as activation function respectively. The weight matrix and bias vector are initialized by Xavier49. The automatic differentiation21 is used to find the derivative of u(x, t) with respect to time t and space x. The Adam algorithm50 or the L-BFGS-B algorithm51 is mainly used to update the parameters, and minimize the loss function of the mean square error (\(MSE_{pinn-forward}\))
where
and
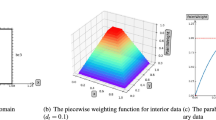
The loss \(MSE_{u}\) corresponds to the initial and boundary data while \(MSE_{f}\) enforces the structure imposed by Eq. (1) at a finite set of collocation points. \(\{x_{u}^{i},t_{u}^{i},u^{i}\}_{i=1}^{N_{u}}\) denote the initial and boundary training data on u(x, t) and \(\{x_{f}^{i},t_{f}^{i}\}_{i=1}^{N_{f}}\) specify the collocations points for f(x, t), which are usually obtained by the Latin hypercube sampling52 and automatic differentiation techniques, respectively. To clarify the whole procedure of PINN, we state the main steps of PINN in Table 1 and depict the schematic diagram in Fig. 1.
On the other hand, for the inverse problem, the parameterized NLPDEs is presented as the general form
where u(x, t) represents the undetermined (or latent) solution, \(\mathscr {N}[ \cdot ;\lambda ]\) is a nonlinear operator with unknown parameter \(\lambda\) (\(\lambda\) is a parameter or a vector consisting of several parameters), and \(\Omega\) is a subset of \(\mathbb {R}^{d}\). The loss function for the inverse problem of NLPDEs is given by
where
and
Here, \(\{x_{u}^{i},t_{u}^{i},u^{i}\}_{i=1}^{N}\) is the dataset generated by u(x, t) using the LHS technique in the specified region and used as the training dataset for \(MSE_{u}\) and \(MSE_{f}\) .The network structure and approaches of every calculation step is same as forward problem.

Flowchart of PINN.
Activation function
The activation function introduces a nonlinear mapping to the neural network, which enables the neural network to learn and represent more complex functional relationships. In the absence of an activation function, the combination of multiple linear layers still produce only linear transformations, which limits the expressive power of neural networks. Common activation functions include the Sigmoid function, the ReLu function, the Tanh function, etc53. Depending on the specific task and the requirements of the network structure, selecting a suitable activation function can have a significant impact on the performance and effectiveness of the neural network. This section discusses the distinction among the three common activation functions: the Sigmoid function, the Tanh function, and the Sine function.
Sigmoid(x)
The sigmoid function, also known as the Logistic function, is one of the most commonly used activation functions. It is often used in binary classification tasks and non-mutually exclusive multi-category prediction. The sigmoid function has the nice property of mapping the input from negative infinity to positive infinity to a range between 0 and 1. Since the probability values lie exactly between 0 and 1, the sigmoid function is often used in tasks that require the output of probability values. The specific mathematical expression for the function is given in Eq. (12)
from this expression and the image of the function shown in Fig. 2, it is clear that the sigmoid function (abbreviated as S(x)) is continuously smooth and derivable. Its derivative can easily be expressed directly using the function itself without additional calculations,i.e., \(S(x)^{'} = S(x)(1-S(x))\). However, as can be seen from the image and the mathematical expression of the derivative, when the function value is close to 0 or 1, the derivative value is close to 0, which leads to the problem of “vanishing gradient.” In deep networks, since the chain rule is essentially a multiplication of derivatives (gradients), when there are one or more small values in the multiplication, the gradient of the entire network approaches 0. This results in the network not being able to learn new knowledge efficiently or learning very slowly.
Tanh(x)
The tanh function and the sigmoid function have similar S-shaped curves, which means that the tanh function may also suffer from the “vanishing gradient” problem when used as an activation function. The mathematical expression of the tanh function is:
It can be observed that the tanh function is a linear transformation and scaling of the sigmoid function. Unlike the sigmoid function, which has a range of (0, 1), the tanh function has a range of \((-1, 1)\). The graph of this function is shown in Fig. 2.
Compared to the sigmoid function, the gradients produced by the tanh function are steeper. According to the chain rule, the derivative of the tanh function is four times the derivative of the sigmoid function. Therefore, when a larger gradient is needed to optimize the model or when there are restrictions on the output range, the tanh function can be chosen as the activation function.
Sin(x)
In standard PINN algorithms, using the tanh activation function and the Xavier initialization strategy can lead to asymptotic flattening of the solution outputs. This flattening of the solution outputs often limits the model’s performance as it tends to get trapped in trivial local minima in many practical scenarios. The sine function (\(\sin (x)\)) is chosen as the activation function to overcome this problem, for the sine function offers the following advantages:
Overcoming asymptotic flattening output problem: Sigmoid and tanh functions saturate at extreme input values, leading to the vanishing gradient problem and causing the network’s output to flatten. In contrast, using the sine function can maintain relatively smooth outputs throughout the input space and is less prone to saturation. Therefore, using the sine function can effectively overcome the asymptotic flattening output problem and enhance the network’s expressive power.
Symmetry: The sine function is symmetrical at the origin, i.e., \(\sin (-x) = -\sin (x)\). This symmetry enhances the stability and symmetry of the neural network model. It helps the model respond similarly to positive and negative input values, reducing model asymmetry and further improving the model’s expressive power.
Improved optimization and convergence speed: The sine function is a continuously differentiable function with smooth properties. This allows the sine activation function to better propagate gradients during the training process, facilitating information flow and optimization convergence. Compared to some discontinuous or non-differentiable activation functions, the smoothness of the sine function makes the network easier to learn and adjust parameters, accelerating the optimization process and improving the model’s training efficiency and performance.
Increased nonlinear fitting capability: The sine function is a nonlinear function, introducing the sine activation function adds richer nonlinear features and increases the neural network’s representation capacity. This is important for solving problems with complex nonlinear relationships, such as image, audio, or time-series data analysis. The periodic nature of the sine function allows it to better capture periodic patterns or variations in the data, further enhancing the model’s fitting capability.

The images of three activation functions and their derivatives.
In conclusion, using the sine function as the activation function offers advantages such as overcoming asymptotic flattening output, periodicity, symmetry, and increased nonlinear fitting capability. These characteristics enable the sine activation function to improve the performance of models in solving real-world problems and avoid getting stuck in trivial local minima.
Error reduction rate
When examining the differences in prediction accuracy between the PINN with the sine function and the standard PINN, a metric noted as ’the Error Reduction Rate (ERR)’54 is adopted. The ERR is designed to quantify the improvement in prediction precision that a method offers over another method. ERR is a dimensionless quantity that indicates the percentage reduction in relative error when using a method compared to another method. Specifically, the formula for calculating the ERR is as follows:
In this paper, \(Re_{1}\) represents the relative error of the results obtained by the standard PINN, and \(Re_{2}\) represents the relative error of the results obtained by the PINN with the sine function. A positive ERR value indicates that the sine function has improved the prediction accuracy, with higher values signifying greater improvements. With this measure, the effectiveness of the ’Sine’ activation function in enhancing PINN’s predictive power can be evaluated more accurately.
Details of the computational platform
In order to ensure the reliability and comparability of experimental results, all experiments were conducted in one experimental environment. We give the specific information of the computing platform to provide a reference for readers to do related research or reproduce the experiments in this paper. All the experiments in this article were completed on a Lenovo computer with an Intel(R) Core(TM) i5-8250U CPU @ 1.60GHz 1.80 GHz processor and 8.00 memory. The environment in which the codes are written and run is based on Python 3.6 and TensorFlow 1.14.
Data-driven solution
In this paper, we consider the following \((1+1)\)-dimensional NLPDE:
where the subscripts denote the partial derivatives, e.g., \(u_t = \frac{\partial u}{\partial t}\), \(\partial _x = \frac{\partial }{\partial x}\), \(\partial _{xx} = \frac{\partial ^2}{\partial x^{2}}\). \(\mathscr {N}(u, u_x , u_{xx}, u_{xxx}, . . .)\) is some nonlinear function of related variables such that Eq. (15) contains many famous nonlinear dispersion equations. In this paper, we focus on the following five equations:
-
(1)
The third-order dispersion KdV equation55,56
$$\begin{aligned} u_{t}+ auu_x +bu_{xxx}=0, \end{aligned}$$(16)where a denotes the strength of the nonlinear term or the magnitude of the interaction force. In nonlinear fluctuations, the term describes wave interactions and nonlinear correction effects. b denotes the strength of the dispersion term.
-
(2)
$$\begin{aligned} u_{t}+a u^2 u_x + u_{xxx}=0, \end{aligned}$$(17)
where a is the free parameter. Eq. (17) can be used as an isolated sub-model for describing the multiplicity of plasma and phonon interactions in a non-tonal lattice, and is generally referred to by researchers as the modified KdV equation.
-
(3)
The general K(2, 2) equation59
$$\begin{aligned} u_{t}+a (u^2)_x + (u^2)_{xxx}=0, \end{aligned}$$(18)where a is a parameter indicating the strength or force of the nonlinear term. Eq. (18) is also known as the two-dimensional KdV equation of the second kind.
-
(4)
The fifth-order Caudrey-Dodd-Gibbon (CDG) equation60
$$\begin{aligned} u_{t}+ au^2 u_x + bu_x u_{xx} + cu u_{xxx} + u_{xxxxx}=0, \end{aligned}$$(19)where a, b, c are arbitrary non-zero constants and \(u_{xxx},u_{xxxxx}\) denote dispersion terms. Eq. (19) is a generalized fifth order dispersion KdV studied primordially by Caudrey et al61,62.
-
(5)
The seventh-order KdV equation(Lax’s equation)63
$$\begin{aligned} u_{t}+ (35u^4+70(u^2u_{xx}+uu^2_{x})+7(2uu_{xxxx}+3u^2_{xx}+4u_xu_{xxx})+u_{xxxxxx})_x =0. \end{aligned}$$(20)It was introduced by Pomeau et al., in order to discuss the stability of the structure of KdV equations in cases of abnormal disorder64.
In this section, we use the PINN algorithm to learn the solutions of the higher-order KdV equations described above. A 5-layer feed-forward neural network (4 hidden layers of 20 neurons each) is constructed, using tanh and sine functions as the activation functions for comparison. The L-BFGS-B algorithm is adopted to optimize the loss function and use the relative \(\mathbb {L}_{2}\) norm to measure the norm error in the solution predictions. In addition, each equation has the same number of randomly selected points \(N_{u}\) at the initial boundaries and the same number of randomly selected configuration points \(N_{f}\) in the space-time domain.
The KdV equation
The general expression for the KdV equation is shown in Eq. (16). In this paper we consider only the parameters are \(a = -6\), \(b=1\)55,56, then the equation is
The single soliton and double soliton solutions are discussed separately in this subsection.
Case 1
In55, the authors used the sine-cosine method to obtain a single soliton solution of Eq. (21), and the expression was given as follows:
The initial value and boundary value conditions are considered as
The residual term of Eq. (21) is:
To obtain the training dataset, we divide the spatial region \(x\in [-2,2]\) and the temporal region \(t\in [-2,2]\) into \(N_{x}=512\) and \(N_{t}=512\) discrete equidistant points, respectively. Thus, the training dataset is the discrete 262,144 points in the given spatio-temporal domain [− 2,2]\(\times\)[− 2,2]. The training data used for the loss function(MSE) consists of \(N_{u}=120\) points randomly selected from the initial boundary data and \(N_{f}=10000\) points randomly selected from the spatio-temporal domain(The following positive problem generates training data in the same way as here and will not be redefined). The experiment results are illustrated in Figs. 3, 4, 5 and 6.
The top panel of Fig. 3 shows the heat map predicted by the PINN algorithm with sine function. The left of the bottom of Fig. 3 shows the more specific comparison between the exact solution and the prediction solution at four different times t = − 0.5, − 0.25, 0.25, and 0.5, and the spatiotemporal dynamics behavior of the prediction single soliton solution of the Eq. (21) is shown on the right. The spatiotemporal dynamics of the exact single soliton solution of the Eq. (21) is shown in Fig. 4 for comparison.
Figure 5 shows the error dynamics between the exact soliton solution and the predictive solution learned by the PINN algorithm with the sine function. Figure 6 illustrates the loss curve in the process of solving the single soliton solution.

The dynamical evolution of the predictive single soliton solution of the Eq. (21).

The exact single soliton solution of the Eq. (21).

Error dynamics.

Loss curve.
As shown in Table 2, the PINN method with the sine activation function can improve the accuracy of the prediction solution. The relative \(\mathbb {L}_{2}\) error of size \(1.62\times 10^{-4}\) is reached when the model runs for about 73 seconds.
Case 2
In this subsection, we focus on the double soliton solution of Eq. (21). The expression is as follows56
The initial value and boundary value conditions are considered as
The residual term is same as Case 1, we omit it.
The experiment results are illustrated in Figs. 7, 8, 9 and 10.

The dynamical evolution of the predictive double soliton solution of the Eq. (21).

The exact double soliton solution of the Eq. (21).
The top panel of Fig. 7 shows the heat map predicted by the PINN algorithm with the sine function. The left of the bottom of Fig. 7 shows the more specific comparison between the exact solution and the prediction solution at four different times \(t=-0.25, -0.05, 0.05, 0.25\), and the spatiotemporal dynamics behavior of the prediction double soliton solution of the Eq. (21) is shown on the right. The spatiotemporal dynamics of the exact double soliton solution of the Eq. (21) is shown in Fig. 8 for comparison.
Figure 9 shows the error dynamics between the exact soliton solution and the predictive solution learned by the PINN algorithm with the sine function. Figure 10 illustrates the loss curve in the process of solving the prediction double soliton solution.

Error dynamics.

Loss curve.
As shown in Table 3, the PINN method with the sine activation function can improve the accuracy of the prediction solution. The relative \(\mathbb {L}_{2}\) error of size \(9.65\times 10^{-3}\) is reached when the model runs for about 679 seconds.
mKdV equation
We investigate the mKdV equation Eq. (17) in this subsection.
Case 1
When \(a=6\), Eq. (17) is
An solitary wave solution of the Eq. (27) is obtained in57:
and the initial value and boundary value conditions are
The residual term can be obtained by Eq. (27), we omit it. The experiment results are illustrated in Figs. 11, 12, 13 and 14:

The dynamical evolution of the predictive solitary wave solution of the Eq. (27).

The exact solitary wave solution of the Eq. (27).

Error dynamics.

Loss Curve.
The top panel of Fig. 11 shows the heat map predicted by the PINN algorithm with the sine function. The left of the bottom of Fig. 11 shows the more specific comparison between the exact solution and the prediction solution at four different times \(t=-2, -1, 1, 2\), and the spatiotemporal dynamics behavior of the prediction solitary wave solution of the Eq. (27) is shown on the right. The spatiotemporal dynamics of the exact solitary wave solution of the Eq. (27) is shown in Fig. 12 for comparison.
Figure 13 shows the error dynamics between the exact soliton solution and the predictive solution learned by the PINN algorithm with the sine function. Figure 14 illustrates the loss curve in the process of solving the solitary wave solution.
As shown in Table 4, the PINN method with the sine activation function can improve the accuracy of the prediction solution. The relative \(\mathbb {L}_{2}\) error of size \(9.44\times 10^{-4}\) is reached when the model runs for about 11 seconds.
Case 2
When \(a=-6\), Eq. (17) is
A kink solution of the Eq. (30) is obtained in58:
and the initial value and boundary value conditions is
The residual term can be obtained by Eq. (30). The experiment results are illustrated in Figs. 15, 16, 17 and 18:

The dynamical evolution of the predictive kink solution of the Eq. (30).

The exact kink solution of the Eq. (30).

Error dynamics.

Loss Curve.
The top panel of Fig. 15 shows the heat map predicted by the PINN algorithm with the sine function. The left of the bottom of Fig. 15 shows the more specific comparison between the exact solution and the prediction solution at four different times \(t=-2, -1, 1, 2\), and the spatiotemporal dynamics behavior of the prediction kink solution of the Eq. (30) is shown on the right. The spatiotemporal dynamics of the exact kink solution of the Eq. (30) is shown in Fig. 16 for comparison.
Figure 17 shows the error dynamics between the exact kink solution and the prediction solution learned by the PINN algorithm with the sine function. Figure 18 illustrates the loss curve in the process of solving the kink solution.
As shown in Table 5, the PINN method with the sine activation function can improve the accuracy of the prediction solution. The relative \(\mathbb {L}_{2}\) error of size \(1.33\times 10^{-4}\) is reached when the model runs for about 7 seconds.
The K(2, 2) equation
We consider the following specific form of the K(2, 2) equation when \(a=1\):
In this section, we focus on the period travelling wave solution of Eq. (33). Through the travelling wave transformation method, the period travelling wave solution of the Eq. (33) is obtained in59:
where c is wave velocity, g and c1 are integral constants. In59, the parameters are selected as \(c = 2, c_1=1, g=3\), then the initial value and boundary value conditions for the Eq. (33) are
The residual term can be obtained by Eq. (33), we omit it. The experiment results are illustrated in Figs. 19, 20, 21 and 22:

The dynamical evolution of the predictive periodic travelling solution of the Eq. (33).

The exact periodic travelling wave solution of the Eq. (33).
The top panel of Fig. 19 shows the heat map predicted by the PINN algorithm with the sine function. The left bottom of Fig. 19 shows the more specific comparison between the exact solution and the prediction solution at four different spaces \(x=-2, -1, 1, 2\), and the spatiotemporal dynamics behavior of the prediction periodic traveling wave solution of the Eq. (33) is shown on the right. The spatiotemporal dynamics of the exact periodic traveling wave solution of the Eq. (33) is shown in Fig. 20 for comparison.
Figure 21 shows the error dynamics between the exact solution and the predictive solution learned by the PINN algorithm with the sine function. Figure 22 illustrates the loss curve in the process of solving the periodic traveling wave solution.

Error dynamics.

Loss curve.
As shown in Table 6, the PINN method with the sine activation function can improve the accuracy of the prediction solution. The relative \(\mathbb {L}_{2}\) error of size \(5.83\times 10^{-4}\) is reached when the model runs for about 93 seconds.
The CDG equation
When \(a=180\), \(b=30\), \(c=30\), the CDG equation60 is
Zhou et al obtained the solitary wave solution of the Eq. (36) by using the Sine-Cosine expansion method60 as follows:
and the initial value and boundary value conditions is
The residual term can be obtained by Eq. (36), we omit it. The experiment results are illustrated in Figs. 23, 24, 25 and 26:

The dynamical evolution of the predictive solitary wave solution of the Eq. (36).

The exact solitary wave solution of the Eq. (36).

Error dynamics.

Loss curve.
The top panel of Fig. 23 shows the heat map predicted by the PINN algorithm with the sine function. The left of the bottom of Fig. 23 shows the more specific comparison between the exact solution and the prediction solution at four different times \(t=-1, -0.5, 0.5, 1\), and the spatiotemporal dynamics behavior of the prediction solitary wave solution of the Eq. (36) is shown on the right. The spatiotemporal dynamics of the exact solitary wave solution of the Eq. (36) is shown in Fig. 24 for comparison.
Figure 25 shows the error dynamics between the exact solution and the predictive solution learned by the PINN algorithm with the sine function. Figure 26 illustrates the loss curve in the process of solving the solitary wave solution.
As shown in Table 7, the PINN method with the sine activation function can improve the accuracy of the prediction solution. The relative \(\mathbb {L}_{2}\) error of size \(1.25\times 10^{-2}\) is reached when the model runs for about 312 seconds.
The Lax’s equation
We discuss the following solitary wave solution63 to Eq. (20)
The initial value and boundary value conditions for the Eq. (20) is
The residual term can be obtained by Eq. (20), we omit it. The experiment results are illustrated in Figure 27, 28, 29 and 30:

The dynamical evolution of the predictive solitary wave solution of the Lax’s equation.

The exact solitary wave solution of the Lax’s equation.

Error dynamics.

Loss curve.
The top panel of Fig. 27 shows the heat map predicted by the PINN algorithm with the sine function. The left of the bottom of Fig. 27 shows the more specific comparison between the exact solution and the prediction solution at four different times \(t=-2, -1, 1, 2\), and the spatiotemporal dynamics behavior of the prediction solitary wave solution of Eq. (20) is shown on the right. The spatiotemporal dynamics of the exact solitary wave solution (39) is shown in Fig. 28 for comparison.
Figure 29 shows the error dynamics between the exact solution and the predictive solution learned by the PINN algorithm with the sine function. Figure 30 illustrates the loss curve in the process of solving the solitary wave solution.
As shown in Table 8, the PINN method with the sine activation function can improve the accuracy of the prediction solution. The relative \(\mathbb {L}_{2}\) error of size \(1.10\times 10^{-3}\) is reached when the model runs for about 3961 seconds.
Under a fixed framework (4 hidden layers and 20 neurons each), 7 different solutions of 5 equations are learned successfully by the PINN method. Tanh and sine as activation functions are used in the PINN method, respectively, aiming to explore the influence of different activation functions on the accuracy and efficiency of learning results. Experiments show that in the problem of learning the solution of the KdV equation family, the sine function can improve the accuracy, but the degree of improvement is not very obvious; especially in the case of simple solution forms (kink solution, single soliton solution), the original PINN (tanh) can obtain an acceptable learning effect. When the form of the solution is more complex (double soliton solution, periodic solution), the PINN framework using sine as the activation function can improve the accuracy by 1 order of magnitude.
The experiment also shows that the more complex the form of the differential equation, such as higher order differential terms, more nonlinear terms, are obvious factors that affect the learning accuracy and efficiency. We can see that both the five-order and seven-order equations are less accurate than the third-order equations, and the time required increases sharply with the complexity of the equations.
Data-driven parameter estimation of NLPDEs
In this section, the PINN method with tanh and sine as activation functions, respectively, is used to study the inverse problem of nonlinear partial differential equations: that is, to learn the unknown parameters of the above five KdV equations. In order to obtain the estimated parameters and investigate the effects of the activation functions, all examples in this section continue to use the same structural framework: 3 hidden layers with 20 neurons each. The L-BFGS-B algorithm is used to optimize the loss function, the relative \(\mathbb {L}_{2}\) norm is used to measure the error between the predicted and actual, and the Latin hypercubic sampling method is used to get the training dataset N.
Data-driven parameter estimation in the KdV equation
We consider the following three-order KdV equation with an unknown real-valued parameter \(\alpha\):
then the residual term is
The PINN algorithm learns u(x, t) and the parameter \(\alpha\) by minimizing the mean square error loss
where \(\{x_{u}^{i},t_{u}^{i},u^{i}\}_{i=1}^{N}\) represents the training data come from the exact double soliton solution of Eq. (41) with \(\alpha =1\) and \((x,t)\in [-2,2]\times [-2,2]\):
The spatial region \(x\in [-2,2]\) and the temporal region \(t\in [-2,2]\) are divided into \(N_{x}=512\) and \(N_{t}=512\) discrete equidistant points, respectively. Thus, the dataset is a discrete set of 262144 points in the given time-space region [-2,2]\(\times\)[-2,2]. We use Latin hypercubic sampling to select \(N=40000\) points out of the 262144 points in \((x, t)\in [-2, 2]\times [-2, 2]\) as the training dataset. (The training data used in the following four subsections are generated in the same way as here and are omitted.)
Table 9 shows the performance comparison between the PINN algorithm with the sine function and the standard PINN algorithm to solve the double soliton solution and the parameter \(\alpha\) of the Eq. (41). It can be easily found from Table 9 that the performance of the PINN algorithm with the sine function is better than the standard PINN algorithm in both the accuracy of learning solutions and the accuracy of identifying unknown parameter \(\alpha\).
Data-driven parameter estimation in the mKdV equation
We consider the following three-order mKdV equation with an unknown real-valued parameter \(\alpha\):
then the residual term is
The PINN algorithm learns u(x, t) and the parameter \(\alpha\) by minimizing the mean square error loss
where \(\{x_{u}^{i},t_{u}^{i},u^{i}\}_{i=1}^{N}\) represents the training data on the exact kink solution of Eq. (44) with \(\alpha =1\), and \((x,t)\in [-4,4]\times [-4,4]\):
Table 10 shows the performance comparison between the PINN algorithm with the sine function and the standard PINN algorithm to learn the parameter \(\alpha\) of the Eq. (44). It is obvious that the performance of the PINN algorithm with the sine activation function is better than the standard PINN algorithm in the accuracy of the learning solution. However, the accuracies of the values of unknown parameter \(\alpha\) obtained by the two methods is very high, and there are no obvious difference.
Data-driven parameter estimation in the K(2, 2) equation
We consider the following K(2, 2) equation with two unknown real-valued parameter \(\alpha\) and \(\beta\):
then the residual term is
The PINN algorithm learns u(x, t) and the parameter \(\alpha\) and \(\beta\) by minimizing the mean square error loss
where \(\{x_{u}^{i},t_{u}^{i},u^{i}\}_{i=1}^{N}\) represents the training data which comes from the exact double soliton solution of Eq. (47) with \(\alpha =1\) and \(\beta =1\), in \((x,t)\in [-4,4]\times [-20,20]\):
Table 11 shows the performance comparison between the PINN algorithm with the sine function and the standard PINN algorithm to solve the unknown parameters \(\alpha\) and \(\beta\) of the K(2,2) equation. It can be easily found from Table 11 that the performance of the PINN algorithm with the sine function is better in both the accuracy of learning solutions and the accuracy of identifying unknown parameters \(\alpha\) and \(\beta\).
Data-driven parameter estimation in the CDG equation
In this section, we consider the CDG equation with an unknown parameter \(\alpha\):
then the residual term is
The PINN algorithm learns u(x, t) and the parameter \(\alpha\) by minimizing the mean square error loss
where \(\{x_{u}^{i},t_{u}^{i},u^{i}\}_{i=1}^{N}\) represents the training data on the exact solitary wave solution of Eq. (50) with \(\alpha =30\),in \((x,t)\in [-10,10]\times [-2,2]\):
Table 12 shows the performance comparison between the PINN algorithm with the sine function and the standard PINN algorithm to learn the unknown parameter \(\alpha\) of the CDG equation. It can be seen from Table 12, that the value of the loss function is small, and the precisions of the solution and the unknown parameter are acceptable. The learning effects of the two activation functions are not much different.
Data-driven parameter estimation in the Lax’s equation
In this section, we consider the Lax’s equation with coefficient \(\alpha\):
Then the residual term is
The PINN algorithm learns u(x, t) and the parameter \(\alpha\) by minimizing the mean square error loss
where \(\{x_{u}^{i},t_{u}^{i},u^{i}\}_{i=1}^{N}\) represents the training data on the exact solitary solution of Eq. (53) with \(\alpha =1\) and \((x,t)\in [-4,4]\times [-4,4]\):
Table 13 shows the performance comparison between the PINN algorithm with the sine function and the standard PINN algorithm to learn the unknown parameter \(\alpha\) of the CDG equation. It can be seen from Table 13, that the value of the loss function is small, and the precisions of the solution and the unknown parameter are acceptable. The learning effect of PINN with the tanh activation function is better than the other.
In this section, we learn the solutions and unknown parameters of 5 equations using two different activation functions on the same PINN framework. Experiments show that PINN can learn the values of unknown parameters very well. In addition to the 7-order Lax’s equation, the PINN method using the sine function as the activation function can obtain relatively higher precision.
Discussion and conclusion
Through the tireless research of mathematical researchers, a number of effective methods have been obtained in both exact analytical solutions and numerical solutions. However, for various NLPDEs, there are still a lot of problems to be solved. The excellent performance of artificial neural networks in many research fields provides a new way for studying nonlinear partial differential equations. The PINN framework imparts the model structure of PDE into the learning iterative process of the artificial neural network, which guarantees the reliability of the method theoretically and has been validated effectively in practice. However, can the robustness of PINN be maintained for NLPDEs with complex structures, such as high-order partial derivatives and nonlinear terms of various forms? Even for equations with simple structures, it still has special solutions with complex forms such as multi-soliton solutions, periodic solutions, etc.. Can PINN learn solutions with high precision based on the data-driven principle? These are many questions worth investigating.
In this paper, a series of high-order NLPDEs are studied to get predicted solutions and parameters and explore the effects of different activation functions on learning accuracy and efficiency. At the same time, we hope to analyze the influence of the structure of the model on the reliability of the PINN method through the experimental results. The PINN algorithm with the sine activation function and the standard PINN algorithm(with the tanh activation function) are applied to solving the forward problem and inverse problem of a family of higher order dispersive KdV equations. The results show that both algorithms can learn data-driven single soliton solutions, double soliton solutions, period traveling wave solutions, and kink solutions. Experiments show that PINN with sine activation function can obtain better accuracy than the standard PINN in the problem. For the parameter estimation of these higher-order NLPDEs, the same is true in most cases, and the PNN algorithm using the sine activation function can obtain higher accuracy.
The experiment also shows that when the form of the solution is relatively simple, the PINN algorithm can learn the solution with high precision in a short time, while when the form of the solution is more complex, the PINN algorithm needs more time to get the solution with acceptable precision. For the solution of the same form, the more complex the structure of the equation, the more learning time is required, which is consistent with the structure of the loss function. These results show that it is necessary to improve the PINN algorithm for complex equations or complex solutions.
In order to make a comparison, this paper uses one framework to learn the solutions of different equations for the forward problem and another framework to learn the solutions and unknown parameters for the inverse problem. In practice, the number of PINN layers and the number of neurons in each layer can be adjusted to fit different equations. A typical example is the 7th-order Lax’s equation, in the learning of the positive problem, using the PINN method with 5 hidden layers, the accuracy of the learned solution obtained by the two activation functions can only reach \(10^{-3}\). In the inverse problem, four hidden layers are used, and the learning accuracy of the standard PINN can be improved by an order of magnitude, and the performance of the standard PINN exceeds that of the PINN using the sine activation function.
It should be emphasized that the research in this paper is not limited to various KdV equations. We also performed experiments on other types of higher order partial differential equations (not included in this paper). A large number of experimental results show that for problems with rich physical backgrounds, it is effective to use the PINN framework and known information to train models to solve or estimate model parameters(modeling). When the complexity of the problem increases (high derivative or complex nonlinearity, etc.), it is necessary to improve the PINN, such as the selection of activation function, the correction of the loss function and the improvement of optimization measures. The results of these experiments also show that the PINN algorithm still has the potential to explore depth. Most of the NLPDEs can be used to describe the complex phenomena in the real world, which contains rich physical information and mechanisms. Therefore, the research in this paper provides a research idea for exploring deep learning in the aspects of physical problems (optics, electromagnetism, microwave, quantum, etc.) or problems based on the intrinsic mechanism of physics (econophysics, biophysics). Future research will continue to focus on the PINN algorithm, exploring algorithm improvements and applications in more areas.
Data availability
The datasets used and/or analyzed during the current study available from the corresponding author on reasonable request.
References
Ablowitz, M. J. & Clarkson, P. A. Solitons, Nonlinear Evolution Equations and Inverse Scattering (Cambridge University Press, 1991).
Hu, Y. Geometry of Bäcklund transformations I: Generality. Trans. Am. Math. Soc. 373(2), 1181–1210 (2020).
Gu, C., Hu, H. & Zhou, Z. Darboux transformations in integrable systems: Theory and their applications to geometry (Springer, 2004).
Hirota, R. The Direct Method in Soliton Theory (Cambridge University Press, 2004).
Shao, C. et al. Periodic, n-soliton and variable separation solutions for an extended (3+1)-dimensional KP-Boussinesq equation. Sci. Rep. 13(1), 15826 (2023).
Junaid-U-Rehman, M., Kudra, G. & Awrejcewicz, J. Conservation laws, solitary wave solutions, and lie analysis for the nonlinear chains of atoms. Sci. Rep. 13(1), 11537 (2023).
Zhang, H. et al. N-lump and interaction solutions of localized waves to the (2+ 1)-dimensional generalized KP equation. Results Phys. 25, 104168 (2021).
Chen, H. et al. Behavior of analytical schemes with non-paraxial pulse propagation to the cubic-quintic nonlinear Helmholtz equation. Math. Comput. Simul. 220, 341–356 (2024).
Zhang, M. et al. Characteristics of the new multiple rogue wave solutions to the fractional generalized CBS-BK equation. J. Adv. Res. 38, 131–142 (2022).
Gu, Y. et al. Variety interaction between k-lump and k-kink solutions for the (3+ 1)-D Burger system by bilinear analysis. Results Phys. 43, 106032 (2022).
Zhou, X. et al. N-lump and interaction solutions of localized waves to the (2+ 1)-dimensional generalized KDKK equation. J. Geom. Phys. 168, 104312 (2021).
Liang, C. Finite Difference Methods for Solving Differential Equations (National Taiwan University, 2009).
Dhatt, G., Lefrancois, E. & Touzot, G. Finite element method (John Wiley and Sons, 2012).
Shen, J., Tang, T. & Wang, L. L. Spectral Methods: Algorithms, Analysis and Applications (Springer, 2011).
Rumelhart, D. E., Hinton, G. E. & Williams, R. J. Learning representations by back-propagating errors. Nature 323(6088), 533–536 (1986).
Krizhevsky, A., Sutskever, I. & Hinton, G. E. Imagenet classification with deep convolutional neural networks. Adv. Neural Inform. Process. Syst. 25, (2012).
Enab, K. & Ertekin, T. Artificial neural network based design for dual lateral well applications. J. Petrol. Sci. Eng. 123, 84–95 (2014).
LeCun, Y., Bengio, Y. & Hinton, G. Deep learning. Nature 521(7553), 436–444 (2015).
Shi, S., Han, D. & Cui, M. A multimodal hybrid parallel network intrusion detection model. Connect. Sci. 35(1), 2227780 (2023).
Fei, R. et al. An improved BPNN method based on probability density for indoor location. IEICE Trans. Inf. Syst. 106(5), 773–785 (2023).
Baydin, A. G. et al. Automatic differentiation in machine learning: A survey. J. Mach. Learn. Res. 18(153), 1–43 (2018).
Hornik, K., Stinchcombe, M. & White, H. Universal approximation of an unknown mapping and its derivatives using multilayer feedforward networks. Neural Netw. 3(5), 551–560 (1990).
Li, X. Simultaneous approximations of multivariate functions and their derivatives by neural networks with one hidden layer. Neurocomputing 12(4), 327–343 (1996).
Lagaris, I. E., Likas, A. & Fotiadis, D. I. Artificial neural networks for solving ordinary and partial differential equations. IEEE Trans. Neural Netw. 9(5), 987–1000 (1998).
Aarts, L. P. & Van Der Veer, P. Neural network method for solving partial differential equations. Neural Process. Lett. 14, 261–271 (2001).
Ramuhalli, P., Udpa, L. & Udpa, S. S. Finite-element neural networks for solving differential equations. IEEE Trans. Neural Netw. 16(6), 1381–1392 (2005).
Sirignano, J. & Spiliopoulos, K. DGM: A deep learning algorithm for solving partial differential equations. J. Comput. Phys. 375, 1339–1364 (2018).
Raissi, M., Perdikaris, P. & Karniadakis, G. E. Physics-informed neural networks: A deep learning framework for solving forward and inverse problems involving nonlinear partial differential equations. J. Comput. Phys. 378, 686–707 (2019).
Pang, G., Lu, L. & Karniadakis, G. E. fPINNs: Fractional physics-informed neural networks. SIAM J. Sci. Comput. 41(4), A2603–A2626 (2019).
Kharazmi, E., Zhang, Z., Karniadakis, G. E. Variational physics-informed neural networks for solving partial differential equations. arXiv:1912.00873 (2019).
Zhang, D., Guo, L. & Karniadakis, G. E. Learning in modal space: Solving time-dependent stochastic PDEs using physics-informed neural networks. SIAM J. Sci. Comput. 42(2), A639–A665 (2020).
Li, J. & Chen, Y. A physics-constrained deep residual network for solving the sine-Gordon equation[J]. Commun. Theor. Phys. 73(1), 015001 (2020).
Pu, J., Li, J. & Chen, Y. Solving localized wave solutions of the derivative nonlinear Schrödinger equation using an improved PINN method. Nonlinear Dyn. 105, 1723–1739 (2021).
Pu, J., Peng, W. & Chen, Y. The data-driven localized wave solutions of the derivative nonlinear Schrödinger equation by using improved PINN approach. Wave Motion 107, 102823 (2021).
Wang, L. & Yan, Z. Data-driven rogue waves and parameter discovery in the defocusing nonlinear Schrödinger equation with a potential using the PINN deep learning. Phys. Lett. A 404, 127408 (2021).
Zhou, Z. & Yan, Z. Solving forward and inverse problems of the logarithmic nonlinear Schrödinger equation with PT-symmetric harmonic potential via deep learning. Phys. Lett. A 387, 127010 (2021).
Zhou, Z. & Yan, Z. Deep learning neural networks for the third-order nonlinear Schrödinger equation: Bright solitons, breathers, and rogue waves. Commun. Theor. Phys. 73(10), 57–65 (2021).
Bai, G., Koley, U., & Mishra, S., et al. Physics informed neural networks(PINNs) for approximating nonlinear dispersive PDEs. arXiv:2104.05584, (2021).
Xie, G. et al. Gradient-enhanced physics-informed neural networks method for the wave equation. Eng. Anal. Boundary Elements 166, 105802 (2024).
Shahrill, M., Chong, M. S. F. & Nor, H. N. H. M. Applying explicit schemes to the korteweg-de vries equation. Mod. Appl. Sci. 9(4), 200 (2015).
Zhang, G., Li, Z. & Duan, Y. Exact solitary wave solutions of nonlinear wave equations. Sci. China, Ser. A Math. 44, 396–401 (2001).
Wazwaz, A. M. New solitary-wave special solutions with compact support for the nonlinear dispersive K(m, n) equations. Chaos Solitons Fractals 13(2), 321–330 (2002).
Wazwaz, A. M. Analytic study on the generalized fifth-order KdV equation: New solitons and periodic solutions. Commun. Nonlinear Sci. Numer. Simul. 12(7), 1172–1180 (2007).
Salas, A. H. & Gómez, S. C. A. Application of the Cole-Hopf transformation for finding exact solutions to several forms of the seventh-order KdV equation. Math. Probl Eng 2010, 1–14 (2010).
Khan, K. et al. Electron-acoustic solitary potential in nonextensive streaming plasma. Sci. Rep. 12(1), 15175 (2022).
Khan, K., Ali, A., & Irfan, M. Spatio-temporal fractional shock waves solution for fractional Korteweg-de Vries burgers equations. In Waves in Random and Complex Media 1-17 (2023).
Khan, K. et al. Higher order non-planar electrostatic solitary potential in a streaming electron-ion magnetoplasma: Phase plane analysis. Symmetry 15(2), 436 (2023).
Li, J. & Chen, Y. A deep learning method for solving third-order nonlinear evolution equations. Commun. Theor. Phys. 72(11), 115003 (2020).
Glorot, X., & Bengio, Y. Understanding the difficulty of training deep feedforward neural networks[C]//Proceedings of the thirteenth international conference on artificial intelligence and statistics. In JMLR Workshop and Conference Proceedings 249-256 (2010).
Kingma, D.P., & Ba, J. Adam: A method for stochastic optimization. arXiv:1412.6980 (2014).
Byrd, R. H. et al. A limited memory algorithm for bound constrained optimization. SIAM J. Sci. Comput. 16(5), 1190–1208 (1995).
Stein, M. Large sample properties of simulations using Latin hypercube sampling. Technometrics 29(2), 143–151 (1987).
Sharma, S., Sharma, S. & Athaiya, A. Activation functions in neural networks. Towards Data Sci. 6(12), 310–316 (2017).
Zhang, Z. Y. et al. Enforcing continuous symmetries in physics-informed neural network for solving forward and inverse problems of partial differential equations. J. Comput. Phys. 492, 112415 (2023).
Wazwaz, A. M. A sine-cosine method for handling nonlinear wave equations. Math. Comput. Model. 40(5–6), 499–508 (2004).
Gardner, C. S. et al. Korteweg–Devries equation and generalizations. VI. methods for exact solution. Commun. Pure Appl. Math. 27(1), 97–133 (1974).
Shi-Kuo, L. et al. New periodic solutions to a kind of nonlinear wave equations. Acta Phys. Sin. Chin. Edit. 51(1), 14–19 (2002).
Fu, Z. et al. Jacobi elliptic function expansion method and periodic wave solutions of nonlinear wave equations. Phys. Lett. A 289(1–2), 69–74 (2001).
Dong-Bing, L. et al. On exact solution to nonlinear dispersion KdV equation. J. Southw. China Norm. Univ. 45(6), 21–28 (2020).
Lan-Suo, Z. et al. The solitary waves solution for a class of the fifth-order KdV equation. Math. Appl. 32(2), 376–381 (2019).
Caudrey, P. J., Dodd, R. K. & Gibbon, J. D. A new hierarchy of Korteweg-de Vries equations. Proc. R. Soc. Lond. Math. Phys. Sci. 351(1666), 407–422 (1976).
Dodd, R. K. & Gibbon, J. D. The prolongation structure of a higher order Korteweg-de Vries equation. Proc. R. Soc. Lond. Math. Phys. Sci. 358(1694), 287–296 (1978).
El-Sayed, S. M. & Kaya, D. An application of the ADM to seven-order Sawada–Kotara equations. Appl. Math. Comput. 157(1), 93–101 (2004).
Pomeau, Y., Ramani, A. & Grammaticos, B. Structural stability of the Korteweg-de Vries solitons under a singular perturbation. Phys. D 31(1), 127–134 (1988).
Acknowledgements
The authors thanks the referees for their valuable suggestions. This work is supported by the National Natural Science Foundation of China (No.11561034) and Yunnan Fundamental Research Projects (No.202401AT070395).
Author information
Authors and Affiliations
Contributions
Writing-original draft, C.J.; Methodology, C.J.; Software, C.J.; Writing-Review and Editing, S.J; Resources,S.J.; Supervision, H.A.; Supervision, F.H. All authors reviewed the manuscript.
Corresponding author
Ethics declarations
Competing interests
The authors declare no competing interests.
Additional information
Publisher’s note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution-NonCommercial-NoDerivatives 4.0 International License, which permits any non-commercial use, sharing, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if you modified the licensed material. You do not have permission under this licence to share adapted material derived from this article or parts of it. The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by-nc-nd/4.0/.
About this article

Cite this article
Chen, J., Shi, J., He, A. et al. Data-driven solutions and parameter estimations of a family of higher-order KdV equations based on physics informed neural networks. Sci Rep 14, 23874 (2024). https://doi.org/10.1038/s41598-024-74600-4
Received:
Accepted:
Published:
DOI: https://doi.org/10.1038/s41598-024-74600-4
