
Abstract
In this work, we construct Lyapunov functionals to analyze the global stability of the equilibria in reaction-diffusion systems arising in biological models. We employ Lyapunov functionals originally constructed for associated ordinary differential equation (ODE) models and extend them to partial differential equation (PDE) systems involving spatial diffusion. We analyze disease-free and endemic equilibrium stability in terms of the basic reproduction number \({\mathscr {R}}_0\) a threshold parameter. Specifically, we show that when \({\mathscr {R}}_0<1\) the disease-free equilibrium is globally asymptotically stable, while for \({\mathscr {R}}_0> 1\) the endemic equilibrium is globally stable under certain conditions. To make our methods more feasible, we supply some examples from epidemiology and good health, including spatially structured models with diffusion. Numerical simulations are provided to justify the theoretical results and to show the convergence behavior of the solutions.
Similar content being viewed by others

Introduction
Infectious diseases have always represented a threat to the health of populations in the world and their dynamics follow complex patterns both in space and time1. The spread can occur either within a population or as spatial diffusion between regions through human mobility, environmental factors, or due to interactions between the host and a vector. The knowledge of the dynamics of infectious diseases is paramount for designing control strategies. Mathematical modeling has become a very powerful means for the analysis of infectious disease dynamics: Keeling and Rohani2 and Murray3.
The motivation behind this study stems from the urgent need to understand how spatial heterogeneity and individual movement patterns influence the spread of infectious diseases. Traditional compartmental models try to ignore spatial interactions, yet real epidemics exhibit clear geographical structure that can be formulated only within the framework of spatial modeling. We attempt here to plug this hole by adding diffusion processes to the conventional epidemiological model and thus better understand how diseases propagate in realistic, spatially structured environments. Such information is important to design effective containment and mitigation strategies.
Diffusion in infectious disease modeling is the transmission of an infection or infected population in space. They observe the spread of diseases through dispersal or movement and are especially useful in observing geography-, environment-, or mobility-mediated outbreaks4. Ignoring this would result in unrealistic uniform mixing assumptions and fail to capture observed spatial spread patterns such as epidemic waves or hotspots. Therefore, spatial diffusion allows the model to reflect geographically heterogeneous dynamics more accurately.
The coupling between local reaction kinetics, e.g., infection, recovery, and immunity, and spatial dispersion generates complex phenomena like traveling waves and pattern formation. Fisher-KPP-type equations, for instance, have been used to model the spread of epidemics in space, e.g., in the seminal papers of Aronson and Weinberger5, and more recently by Wang and Zhao6. Traveling wave solutions have been applied to describe rabies spread in fox populations (see Mollison7 and8,9) and dengue outbreaks (see Smith et al.10).
Lyapunov functionals have been successfully adapted from ODE to PDE epidemic models to establish global stability of equilibria. Examples of such works are those by Wang and Zhao11, where Lyapunov functionals were established for age-structured and spatially structured models, and Salako and Smith12, where global dynamics were studied in diffusive SEIR systems.
The threshold value \({\mathscr {R}}_0\) is important for the determination of the destiny of an epidemic. Its usefulness also extends to spatial models, where it continues to be a bifurcation parameter for disease extinction or persistence (Diekmann et al.13; Wang and Zhao14). If \({\mathscr {R}}_0<1\) then the disease-free equilibrium is globally asymptotically stable, if \({\mathscr {R}}_0 >1\), an endemic equilibrium generally emerges, which can also exhibit spatial persistence or wavefronts depending on the structure of the system.
Moreover, numerical techniques are of great use in depicting and calculating dynamics of spatial epidemic models. Finite difference and finite element techniques are among the techniques often utilized to simulate solutions and calculate the effect of variables like mobility, heterogeneity, and controls on outcomes. Study by Wu et al.15, Brauer et al.16, and Allen et al.17 illustrates the application of simulations to guide public health policy by describing various intervention strategies.
The study addresses the mathematical analysis and numerical simulation of diffusive epidemic models. It develops Lyapunov functionals for reaction-diffusion equations derived from classical epidemiological models. The goal is to understand the global stability behavior of equilibria with respect to \({\mathscr {R}}_0\), and to support the analytical results with computational simulations. Our work contributes to the growing literature on spatial disease modeling by bridging theoretical analysis and real-world applicability.
Part I: global dynamics of reaction–diffusion SITR epidemic model
The SIR model, developed in 192718, assumes that an individual recovering from a disease develops lifelong immunity and the population size is constant. This model can help a lot in understanding how disease can spread in global networks, such as the recent H1N1 outbreak. It can be adapted for understanding the rate of spread in different countries and how it may re-enter a country after the initial epidemic phase has passed19. This model can guide public health responses, give warnings of expected re-emergence times, and can be used in cost-benefit analysis of vaccinations and antiviral drugs20,21.
This section deals with the SITR model in epidemiology, which investigates the impact of treatment on infected individuals and the spread of infectious diseases22,23,24. It compares the disease-free equilibrium and the endemic equilibrium, and the stability of the equilibrium. The paper also plots graphs of the number of susceptibles, infectives, and removed through time. It suggests introducing a treatment rate to the rate of recovery for infected people, assuming that the rate of recovery is inversely proportional to the duration of infection. We consider the following model
where \(S(\omega ,t),~I(\omega ,t),~T(\omega ,t),~R(\omega ,t)\) are respectively the densities of the susceptible individuals, infected persons,individuals in treatment, and recovered persons at time t and position \(\omega\). \(\nu\) is the natural death coefficient. The rate \(\beta\) is the probability for transmission of the infection.\(\gamma\) is recovering coefficient without resorting to treatment. \(\eta\) is infection related death rate.The rate of treatment \(\delta\).\(\kappa\) is the recovery rate after treatment. \(\sigma\) the rate of return to infected compartment. We assume that the initial conditions and Neumann boundary conditions are written in the form:
Model (1) accounts for spatiotemporal dynamics of an infectious disease through a reaction-diffusion framework with four compartments: susceptible (S), infected (I), quarantined or treated (T), and recovered (R). The susceptibles are recruited at a fixed rate and lost due to natural death or due to infection through normal mass-action contact with infectives. The infected class increases with new infections and decreases with natural mortality, disease-caused death, treatment, or cure. Interestingly, the model has a term for relapse or treatment failure, where individuals in the treated class re-enter the infectious class. Treated individuals are hypothesized to enter this class from the infected compartment at some specific rate, and may recover, relapse, or die naturally. The recovered class is formed through two pathways: direct recovery from disease or recovery after treatment, and permanent immunity is gained by these individuals. Each compartment diffuses in space, mimicking human travel or diffusion of infection vectors, and allowing spatial spread to be explored like traveling waves or regional clustering of disease.The spatial diffusion and relapse of treatment incorporate realistic and complex epidemiological dynamics such as delayed clearance, reinfection through treatment failure, and non-homogeneous geographical spread. The formulation provides a solid framework to analyze stability, persistence, and infectious disease control, in particular the threshold behavior governed by the basic reproduction number \({\mathscr {R}}_0\).
Existence and uniqueness of solution
Let \({\mathbb {X}}\) in Banach space \({\mathbb {C}}\big (\Omega ;{\mathbb {R}}\big )\) contain real-value function \(\Phi _n (\Omega )\) with \(\Vert \Phi \Vert _{{\mathbb {X}}} = \sup _{\omega \in \Omega } |\Phi (\omega )|\). Let \(L_1\), \(L_2\),\(L_3\) and \(L_4\) be four linear operators, \(D(L_i)({\mathbb {X}}\longrightarrow {\mathbb {X}})\) defined by:
and
\(L_i:D(L_i)\longrightarrow {\mathbb {X}}\) are continuous and bounded linear operators in \(D(L_i)\) . Therefore, \(L_1, L_2, L_3,L_4\) are generators of uniformly continuous particles.semi- groups \(\{T_{S}(t)\}_{t\in {\mathbb {R}}^+}\), \(\{T_{I}(t)\}_{t\in {\mathbb {R}} ^+}\),\(\{T_{T}(t)\}_{t\in {\mathbb {R}} ^+}\) and \(\{T_{R}(t)\}_{t\in {\mathbb {R}} ^+}\) on \({\mathbb {X}}\) (see Theorem25), in deduces that the semi-groups are positive. The existence and uniqueness of the solution are determined by the following theorem:
Theorem 2.1
The diffusive model (1) have a unique solution \((S(.,t), I(.,t),T(.,t), R(.,t)) \in \Theta\) for \((S_0, I_0,T_0,R_0)\in \Omega\)
Proof
Since \(L_1, L_2,L_3,L_4\) are generators of uniformly continuous semigroups \(\{T_{S}(t)\}_{t\in {\mathbb {R}}^+}\), \(\{T_{I }(t)\}_{t\in {\mathbb {R}}^+}\), \(\{T_{T}(t)\}_{t\in {\mathbb {R}}^+}\) and \(\{T_{R}(t)\}_{t\in {\mathbb {R}}^+}\) on \({\mathbb {X}}\) and the model (1) can be inserted by abstract form in the following
with \(X(x,t)=(S(x,t), I(x,t),T(x,t), R(x,t))\). Note that \(f_{i}\) are of class \(C^{1}\), then it is locally Lipschitz with respect to the second variable, so implies the existence and uniqueness of the solution. \(\square\)
Steady states
As stated in the previous section.Clearly, the 4th equation of the system (1) independent of other equations. So, we can reduction the system (1) to the following form
The system (1) admits a unique disease free steady state (DFSS) \(E_0=(S_0,0,0)\), with:
Now, to find the positive steady state say (endemic steady state) and referred to as (ESS) , according to the results in the following lemma
Lemma 3.1
When \(R_0>1\), the model (1) has a unique endemic steady state (ESS), which represents to \(E^{*}=(S^{*},I^{*}, T^{*})\).
Proof
\(E^*\) verified the following system
Using similar calculations to the proof of Lemma 3.1, we deduce the result:
we replace (5) in the second equation of (4) we get:
and
Thus, the model (3) guarantee has a unique (ESS), \(E_{1}^{*}=(S^*, I^{*}, T^{*})\),if and only if \({\mathscr {R}}_0 = \frac{\chi }{ (\nu +\eta + \delta +\gamma ) - \frac{\sigma \delta }{\nu + \kappa + \sigma }} > 1\) with
where
The proof of this lemma is therefore completed. \(\square\)
Stability analysis
he obtained results are summarized in the following theorem:
Theorem 4.1
If \({\mathscr {R}}_0 < 1\) the disease-free state is globally asymptotically stable and unstable if \({\mathscr {R}}_0 > 1\)
Proof
Consider the following system of eigenvalues:
The function \(U(\omega ) = \phi (\omega )\) \(\in C^2(\Omega )\) which checks the system (8) and we call it eigenfunction,where \(\lambda _n > 0\) is eigenvalue of \(-\Delta U\). Now we pose \(\Omega = [-l,l]\) so we get \(U(\omega ) = \cos (\frac{n\pi )}{l}x)\) and \(\lambda _n = \big (\frac{n\pi }{l}\big )^2\) :
with we put J the Jaccobian matrix associated with (3) in the steady state \(E_0\), we write the system in the form:
with
and
therefor
Then, we obtain
In not that
Clearly, the 1st eigenvalue of K.
So, the remain tow eigenvalues of (DFSS), are calculated from the following matrix.
with:
and
we get \(Det(M) > 0\) weher \({\mathscr {R}}_0^*= \frac{\beta (\nu +\eta + \kappa + \sigma +\lambda _n d_T)}{\nu + \delta +\gamma ) (\nu +\eta + \kappa + \sigma )-\delta \sigma } < 1\) because \(1>{\mathscr {R}}_0 > {\mathscr {R}}_0^*\),hence,\(E_0\) is locally asymptotically stable.To complete the proof of Theorem 4.1, we need to prove the global attraction for \({\mathscr {R}}_0<\) 1 using Lyapunov function. We consider it is in the following
here h is Volterra function \(h(z) = z - 1 - ln(z)\); \(z \in {\mathbb {R}}^+\). Let, \(L(\omega ,t)\) is a positive defined function at the (DFSS) \((S_0; 0; 0)\). The time derivative of \(L(\omega ,t)\) is:
According to the simplification, we get:
for where the conditions on the banks of Neumann we have \(\bigg [ \nabla S\bigg ]_{- l}^{l} =\bigg [ \nabla I\bigg ]_{- l}^{l} =\bigg [ \nabla T\bigg ]_{- l}^{l} =0\)
if we put \(c = \frac{\sigma }{\nu +\eta + \kappa + \sigma }\), hence
and equality holds if and only if \(S=S_0\) and \(I=T=0\). That is mean (DFSS) is (GAS) if \({\mathscr {R}}_0 < 1\) . \(\square\)
Now, we discuss the (GAS) of the (ESS) if \({\mathscr {R}}_0 > 1\) by the following theorem
Theorem 4.2
The (ESS) of the system (3) is (LAS) if \({\mathscr {R}}_0 > 1\) and otherwise unstable.
Proof
To prove local stability of (ESS), we consider the Jacobian matrix of the system (3) at (ESS) as follows.
Now, we put
where
\(A = -\lambda _n d_S -\nu - \chi I^* = \frac{-\nu }{S^*}- \lambda _n\), \(B= -\chi S^*\), \(C= \chi I^*\), \(D= \frac{-\sigma T^*}{I^*} -\lambda _n d_I\), \(E= \frac{- \delta I^*}{T^*} -\lambda _n d_T\).
Consequently, the eigenvalues are given by the characteristic equation of \(J_{E ^{*}}\) in the following
where
Now, according to the Routh-Hurwitz Criterion, we deduce that (ESS) is LAS under the conditions are satisfied in the following
Clearly, when the \({\mathscr {R}}_0>1\), we guarantee the above conditions are hold. Where, \(S^* = \frac{ (\mu + \delta +\eta +\gamma ) - \frac{\sigma \delta }{\mu + \kappa + \sigma }}{\chi }\)
Next, we show that \(A_3>0\).
Finally, we show the last inequality in \({\bf (H_1)}\), that is,\(A_{1}A_{2}-A_{3} > 0\) we have:
Therefore, for \({\mathscr {R}}_0>1\), we guarantee the \({\bf (H_1)}\) is satisfied, thus, the (ESS) of system (3) is (LAS). This completes the proof.
Now, the (GAS) of (ESS) is analyzed by applied and used the lyapunov function:
Clearly, \(L(\omega ,t)\) is a continuous and differentiable. Then, taking the time derivative of \(L(\omega ,t)\), it is obtained that
Using the equilibrium propriety
we take \(c = \frac{\sigma T^*}{\delta I^*}\)
Therefore, when the \(S=S^*, I=I^*\) and \(T=T ^*\). We have that (ESS) is GAS. \(\square\)
Impact of treatment on the basic reproduction number \({\mathscr {R}}_0\)
A central goal of this study is to investigate the effect of treatment efforts on the transmission dynamics of the disease. In the model, treatment is represented by the transition of infected individuals to the treated class at a rate \(\delta\). Importantly, the model accounts for imperfect treatment, where individuals under treatment may relapse and return to the infectious class at rate \(\sigma\). Therefore, understanding how variations in \(\delta\) influence the basic reproduction number \({\mathscr {R}}_0\) is essential for evaluating the effectiveness of public health or veterinary interventions.
We derive an explicit expression for \({\mathscr {R}}_0\), which quantifies the average number of secondary infections generated by a single infected individual in a completely susceptible population. For this model, \({\mathscr {R}}_0\) is given by:
This expression highlights how treatment (\(\delta\)) influences \({\mathscr {R}}_0\) through both direct removal of infectives and the possibility of relapse via the treated class. To further understand this dependence, we compute the derivative of \({\mathscr {R}}_0\) with respect to \(\delta\):
This result confirms that increasing the treatment rate \(\delta\) always leads to a decrease in \({\mathscr {R}}_0\), despite the presence of treatment failure. Therefore, enhancing the rate at which infectious individuals receive treatment is beneficial in controlling the spread of the disease. This theoretical conclusion is further supported by numerical simulations (see Fig. 3), which visually confirm the negative relationship between \(\delta\) and \({\mathscr {R}}_0\).
From a control perspective, a key question is determining the minimal treatment rate \(\delta _{\min }\) required to ensure disease eradication, i.e., to make \({\mathscr {R}}_0 < 1\). Solving the inequality:
leads to the critical threshold:
This condition provides a quantitative target for policymakers or human health authorities: ensuring that the treatment effort \(\delta\) exceeds \(\delta _{\min }\) guarantees that \({\mathscr {R}}_0 < 1\), thus leading to disease elimination in the long run. In summary, this section emphasizes the crucial role of treatment not only in reducing disease burden but also in shaping the overall epidemic threshold.
Numerical analysis
In this section, we perform numerical simulations to illustrate the theoretical results obtained in the previous sections. The simulations are conducted using finite difference methods to approximate the solutions of the reaction-diffusion system (3). The full list of parameter values used in the simulation are given in the following.
Therefore, consider two scenarios: one where the basic reproduction number satisfies \({\mathscr {R}}_0 < 1\), and another where \({\mathscr {R}}_0 > 1\), to demonstrate the contrasting asymptotic behaviors of the disease dynamics.
The computational space is chosen to be one-dimensional space region \(\Omega = [0,L]\) with homogeneous Neumann boundary conditions, which represents an closed setting with zero population flux along the boundaries. The initial compartment distributions (S, I, T, R) are assumed to be spatially heterogeneous. Parameter values are determined based on biologically reasonable assumptions and are consistent with the analytical conditions for \({\mathscr {R}}_0\).
Figure 1 displays the evolution of susceptible, infected, and treated populations for the case where \({\mathscr {R}}_0 = 0.13 < 1\), with a low transmission rate \(\chi = 0.05\). As expected from the theoretical analysis, the disease dies out over time, and the solution converges to the disease-free equilibrium (DFE). This behavior is consistent with the global asymptotic stability of the DFE under the condition \({\mathscr {R}}_0 < 1\).

Numerical simulations of solutions for system (3), where \(\chi = 0.05\) and \({\mathscr {R}}_0 = 0.13 < 1\). The disease dies out and the solution converges to the disease-free equilibrium.
In contrast, Fig. 2 presents the dynamics for the case where \({\mathscr {R}}_0 = 1.36 > 1\), with a higher transmission rate \(\chi = 0.5\). Here, the infection persists over time and stabilizes at a nontrivial endemic equilibrium. This confirms the theoretical prediction of the global asymptotic stability (GAS) of the endemic steady state (ESS) when \({\mathscr {R}}_0 > 1\).

Numerical simulations of solutions for system (3), where \(\chi = 0.5\) and \({\mathscr {R}}_0 = 1.36 > 1\). The disease persists and the solution converges to an endemic steady state (ESS).
Sensitivity analysis of treatment rate
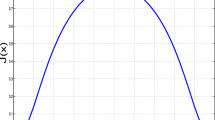
To better understand the role of the treatment rate \(\delta\), we investigate the sensitivity of \({\mathscr {R}}_0\) with respect to changes in \(\delta\). As shown in Figure 3, the value of \({\mathscr {R}}_0\) decreases monotonically with increasing \(\delta\). A critical threshold \(\delta _{\min }\) is identified, beyond which \({\mathscr {R}}_0\) drops below 1, leading to disease elimination.

The dynamics of the basic reproduction number \({\mathscr {R}}_0\) in relation to the treatment rate \(\delta\). When \(\delta < \delta _{\min }\), we have \({\mathscr {R}}_0 > 1\) and the endemic equilibrium is globally stable. For \(\delta > \delta _{\min }\), \({\mathscr {R}}_0 < 1\), and the disease-free steady state becomes globally stable.
These simulations demonstrate the effectiveness of treatment in reducing disease spread. By increasing the treatment effort beyond \(\delta _{\min }\), it is possible to control or eliminate the epidemic, providing a quantitative target for public health interventions.
Discussion
Epidemic models represent disease spread in populations. This research aims to study the behavior of a diffusive epidemic model that considers treatment effects. We have proven that \({\mathscr {R}}_0\) determines the extent of the spread of the disease and its relationship to the treatment. Where if \({\mathscr {R}}_0 < 1\), then we find that the solution converges to the disease free equilibrium point, that is the disease free equilibrium point is globaly stable, and this is when the value of the treatment parameter \(\delta > \delta _{min}\) is large. but if \({\mathscr {R}}_0 > 1\), then we find the solution converges to the endemic equilibrium point, then the endemic equilibrium point is globaly stable, this is for for the treatment parameter \(\delta < \delta _{min}\). Treatment can have a substantial impact on the overall epidemic behavior. This information can inform effective disease control strategies. In summary, the diffusive epidemic model with treatment effect provides valuable insights into infectious disease behavior and aids in developing effective infection control strategies.
Part II: global stability of SVIR epidemic model with diffusion
The SVIR model, an extension of the SIR model, includes vaccination into the framework19,26,27,28. An extra compartment of the model is required for the number of vaccinated individuals (V)29. Vaccinated people can be infected but typically will not develop severe symptoms and therefore cannot spread the virus as actively. Reaction-diffusion models take into account the spatial spread of a population. Reaction-diffusion models have been used in infectious disease modeling to examine the spread of a disease through a geographical region30. In this paper, we study the global stability of the SVIR model with imperfect vaccination and reaction-diffusion31,32. Global stability means that a solution of the model always converges to a steady state regardless of the initial condition.
Mathematical model
In this part, we study the proposal model of Salih et al29:
Under Neumann boundary conditions:
With \(\Omega\) is a bounded interval. Let’s consider the functional space:
Now, since the system (15) is not dependent on the R equation. So, we can reformulation it to the following a new system.
Steady state
The basic reproduction number of (16) given by :
The system (16) has a steady state namely disease free steady state (DFSS) and denoted by \(E_0=(S_{0},V_{0},0)\), when \(S'=V'=I'=0\) with \(S_{0}=\frac{\Lambda }{\mu + \alpha - \frac{\alpha \kappa }{\kappa + \mu } } =\frac{\Lambda (\kappa +\mu )}{\mu (\alpha + \kappa +\mu )} > 0\) and \(V_{0}=\frac{\alpha S_0}{\mu +\kappa } > 0\).
Now, to find the positive steady state say (endemic steady state) and referred to as (ESS) , according to the results in the following lemma
Lemma 9.1
If \({\mathscr {R}}_0>1\), the system (16) has a unique endemic steady state, which corresponds to the (ESS).
The (ESS) achieves the following system:
Clearly, we can calculated the value of \(V^{*}\), from \(2^{nd}\) equation of system (16) in the following
we substituting (18) in the \(1^{st}\) equation of (16) we have:
According to the \(3^{rd}\) equation of the system (16) we have:
Since \(I^*\ne 0\), we get
Where
where \(I^{*2}\) is a positive root of the following equation:
Since that \(a_{1} > 0\) and \(a_{3} < 0\), we confirm that (20) has always one positive root \(I^{*}\), with \(\vartheta = a_2 ^2 -4a_1a_3 > 0\) and \(\vartheta\) is the determinator of (20),
where \(\sqrt{\vartheta } > a_2\).
Obviously, the system (16) always has a unique positive steady state denoted by \(E^{*}=(S^{*}, V^{*}, I^{*})\).
Stability analysis
Let’s recall that \(\lambda _n^2\) are the eigenvalues of \(-\Delta\) with \(n \in {\mathbb {N}}^*\). Now the Jacobian matrix of system (16) at the point \((S^{\star }, V^{\star }, I^{\star } )\) can be written as:
Therefore, the Jacobian matrix at the (DFSS), becomes:
Theorem 10.1
The (DFSS) is LAS if \({\mathscr {R}}_{0}<1\) and unstable if \({\mathscr {R}}_{0} > 1\).
Proof
The following Jacobian matrix is obtained at (DFSS)
Clearly, the \(1^{st}\) eigenvalue of the corresponding characteristic equation is written as
Now, the other eigenvalues of \(J_{E_0}\), can be found by the following matrix
with:
Thus, for \({\mathscr {R}}_0<\) 1, \(E_0\) is locally asymptotically stable. \(\square\)
Theorem 10.2
The disease-free steady state (DFSS), \(E_{0}\) is globally asymptotically stable (GAS), if \({\mathscr {R}}_{0}<1\) .
Proof
We consider the following lyapunov function:
The time derivative of \(L(\omega ,t)\) along the positive solution of system (16), it follows that:
Thus, by applying the propriety of the equilibrium
Clearly, according to the simplification, we get:
for where the conditions on the banks of Neumann we have \(\bigg [ \nabla I\bigg ]_{\Omega } =\bigg [ \nabla S\bigg ]_{\Omega } =\bigg [ \nabla V\bigg ]_{\Omega } =0\)
According to (22) we replace \(\kappa V_0\) by \(\alpha S_0 - \mu V_0\) we get:
Under the conditions \(S=S_0\), \(I=0\) and \(V=V_0\) are satisfied that guarantee the equality holds. Then, the system (16) near (DFSS) is (GAS). \(\square\)
Theorem 10.3
The (LAS) of system (16) at (ESS) is satisfied if \({\mathscr {R}}_0 > 1\).
Proof
The variational matrix of the system (16) around (ESS) is as follows
Due to the (ESS), achieves the following equation:
here
\(A = -\left[ (\mu +\alpha )+\beta I^*+d_S\lambda _n^2\right]\), \(B= -\beta S^*\), \(C= -( \mu +\kappa + \varepsilon \beta I^* )-d_V\lambda _n^2\), \(D= -\varepsilon \beta V^*\), \(E= \beta I^*\) and \(F=\varepsilon \beta I^*\)
Then, the characteristic equation is given by
where
According to Routh-Hurwitz criterion, characteristic equation will have negative real roots and the (ESS) is (LAS) if the following conditions are true
Clearly, when the \({\mathscr {R}}_0>1\), we guarantee the above conditions are hold. Such that,
Next, we show that \(A_3>0\).
Finally, we show the last inequality in \({\bf (H_1)}\), that is,\(A_{1}A_{2}-A_{3} > 0\) we have:
Therefore, the (ESS) of system (16) is (LAS), and the Routh-Hurwitz conditions are satisfied when \({\mathscr {R}}_0>1\). This completes the proof. \(\square\)
The next theorem now discusses the system’s global stability (GAS) around the endemic stable state (ESS).
Theorem 10.4
If \({\mathscr {R}}_0 > 1\) the unique endemic steady state (ESS) is globally asymptotically stable (GAS).
Proof
Let us consider a Lyapunov function as follows
The following is the result of taking the time derivative of L(t) along the system (16) affirmative solution
By applying the propriety of the equilibrium and by doing some algebraic manipulation, we get
and equality holds when \(S=S^*\) and \(V=V^*\), we replace the results in system (16) we get \(I=I^*\). Which implies that (ESS) is (GAS). \(\square\)
Furthermore, our main purpose is to determine the effect of the vaccination on the spread of the contagious disease. The responsible rate for the vaccination force is \(\alpha\). Note that this infection is imperfect, where it is possible that the vaccinated person to get infected, but this infection will reduce the transmission rate (this means that \(\beta > \varepsilon \beta\) ). Due to the dependence of asymptotic dynamics to the value of \({\mathscr {R}}_0\), we investigate the sensibility of the \({\mathscr {R}}_0\) to \(\alpha\) using the derivation of \({\mathscr {R}}_0\) with respect to \(\alpha\). By a simple computation we get:
This result means that the vaccination has a negative effect on the value of the BRN and augmenting the number of vaccinated persons will lead to reducing the spread of the disease.
Numerical results
To look into the dynamics and make sure the analytical results are correct, we numerically simulate the effect of the treatment on the dynamics of the system (3) using a set of parameter values that were carefully chosen to make sense from a biological point of view.
The infection disease for different class with time to compare the distribution of the population when \({\mathscr {R}}_0 <1\) and \({\mathscr {R}}_0 >1\) is shown in Fig. 4. In Fig. 4, the basic reproduction number, \({\mathscr {R}}_0 = 3.36 > 1\) when \(\beta =0.8\). The figure tells us that the disease increases and the endemic steady state is global stable. In Fig. 5 the basic reproduction number, \({\mathscr {R}}_0 = 0.33 < 1\) when \(\beta =0.008\). The figure tells us that the disease extinction and the (DFSS) is global stable.

Numerical simulations of solutions for system (15), where \(\beta = 0.8\) and \({\mathscr {R}}_0 = 56 > 1\).

Numerical simulations of solutions for system (15),where \(\beta = 0.8\) and \({\mathscr {R}}_0 =0.336 < 1\).
Discussion
In this part, we have investigated the global stability of the SVIR model with imperfect vaccination and reaction-diffusion. We have proved that the (DFSS) is (GAS) when the basic reproduction number is less than one. We have also proved that the(ESS) is (GAS) when the \({\mathscr {R}}_0 >\). Our results have several implications for the control of infectious diseases. First, they show that imperfect vaccination can help to control the spread of infectious diseases. Second, they show that reaction-diffusion can also help to control the spread of infectious diseases. These results suggest that vaccination and reaction-diffusion should be considered as part of a comprehensive strategy for controlling infectious diseases.
Combined analysis of reaction–diffusion epidemic models: SITR and SVIR formulations
In this study, we presented a unified framework for analyzing two biologically relevant epidemic models incorporating spatial diffusion: a SITR model and a SVIR model. Both models account for critical epidemiological processes such as infection transmission, recovery, treatment, and vaccination, embedded within a reaction-diffusion system. Our goal was to investigate the global stability of disease equilibria by combining analytical tools–such as Lyapunov functionals and the basic reproduction number \({\mathscr {R}}_0\)—with numerical simulations.
Unified methodological approach
For both models, we adopted the same methodological approach. We began by formulating the reaction-diffusion system under homogeneous Neumann boundary conditions, reflecting a closed spatial domain. The local dynamics were modeled using nonlinear ODE compartments extended to PDEs with diffusion operators. We derived the basic reproduction number \({\mathscr {R}}_0\) using the next-generation matrix method adapted to systems with treatment or vaccination terms. We also constructed Lyapunov functionals to investigate the global asymptotic stability (GAS) of disease-free and endemic equilibria, with the threshold determined by the value of \({\mathscr {R}}_0\).
For numerical simulation, we used an implicit finite difference scheme for time integration and central differences for spatial discretization. This enabled the stable and accurate approximation of solutions in both models.
Comparative dynamics and sensitivity
The SITR model emphasized the impact of treatment and imperfect isolation on the spread of disease. We showed that increasing the treatment rate \(\delta\) reduces \({\mathscr {R}}_0\), and derived the minimum value \(\delta _{\min }\) needed to suppress the outbreak. The numerical results confirmed this, showing convergence to the disease-free equilibrium for \(\delta > \delta _{\min }\) and to an endemic state for \(\delta < \delta _{\min }\).
The SVIR model introduced vaccination as a preventive control measure. Similar to the treatment in the SITR model, increasing the vaccination rate reduced the value of \({\mathscr {R}}_0\). We derived an explicit condition for the minimal vaccination rate necessary to ensure \({\mathscr {R}}_0 < 1\), hence eliminating the disease. Simulations revealed the critical role of vaccine coverage in disease control.
Both models illustrated how spatial effects, such as spatial heterogeneity, can persist even under strong local control measures, emphasizing the importance of accounting for mobility and diffusion in public health planning.
Data availability
The data used to support the findings of this study are available from the corresponding author upon request. The articles used to support the findings of this study are included within the article and are cited at relevant places within the text as references.
References
Saravanan, V., Chinnathambi, R. & Rihan, F. A. Modeling and controlling Leptospirosis transmission in humans and rodents. J. Math. Comput. SCI-JM 39(1), 30–49 (2025).
Keeling, M. J. & Rohani, P. Modeling Infectious Diseases in Humans and Animals (Princeton University Press, 2008).
Murray, J.D. Mathematical Biology I: An Introduction. (Springer, 2002)
Okubo, A., & Levin, S.A. Diffusion and Ecological Problems: Modern Perspectives. (Springer, 2001)
Aronson, D. G., & Weinberger, H. F. Nonlinear diffusion in population genetics, combustion, and nerve pulse propagation. In Partial Differential Equations and Related Topics. 5–49. (Springer, 1975).
Wang, W. & Zhao, X. Q. Basic reproduction numbers for reaction-diffusion epidemic models. SIAM J. Appl. Dyn. Syst. 3(1), 130–143 (2004).
Mollison, D. Dependence of epidemic and population velocities on basic parameters. Math. Biosci. 107(2), 255–287 (1991).
Djilali. S., Darazirar R., & Alraddadi. I. Traveling wave solution for a delayed reaction-diffusion two-group SIR epidemic model with a generalized nonlinear incidence function. J. Appl. Math. Comput. s12190-025-02474-4. (2025).
Guenad. B., Darazirar R., Djilali, S., & Alraddadi, I. Traveling waves in a delayed reaction-diffusion SIR epidemic model with a generalized incidence function. Nonlinear Dyn. (2024).
Smith, D. L. et al. Recasting the theory of mosquito-borne pathogen transmission dynamics and control. Trans. R. Soc. Trop. Med. Hyg. 106(8), 407–416 (2012).
Wang, W. & Zhao, X. Q. An age-structured epidemic model with spatial diffusion. J. Differ. Equ. 252(3), 2546–2566 (2012).
Salako, R. B. & Smith, H. L. Global dynamics of a diffusive SEIR epidemic model with density-dependent birth and death rates. J. Math. Biol. 73(6), 1343–1365 (2016).
Diekmann, O., Heesterbeek, J. A. P. & Metz, J. A. J. On the definition and the computation of the basic reproduction ratio \(R_0\) in models for infectious diseases in heterogeneous populations. J. Math. Biol. 28(4), 365–382 (1990).
Wang, W. & Zhao, X. Q. Threshold dynamics for compartmental epidemic models in periodic environments. J. Dyn. Differ. Equ. 20(3), 699–717 (2008).
Wu, J. T., Leung, K. & Leung, G. M. Nowcasting and forecasting the potential domestic and international spread of the 2019-nCoV outbreak originating in Wuhan, China: A modelling study. Lancet 395(10225), 689–697 (2016).
Brauer, F., Castillo-Chavez, C. & Feng, Z. Mathematical Models in Epidemiology (Springer, 2012).
Darazirar, R. et al. Minimal wave speed and traveling wave in nonlocal dispersion SIS epidemic model with delay. Bound Value Probl. 2025, 67. https://doi.org/10.1186/s13661-025-02055-1 (2025).
Kermack, W. O. & McKendrick, A. G. A contribution to the mathematical theory of epidemics. Proc. R. Soc. Lond. A 115, 700–721 (1927).
Diekmann, O., Heesterbeek, J. A. P. & Metz, J. A. J. Mathematical Epidemiology of Infectious Diseases: Dynamics and Control (Wiley, New York, 2000).
Chinviriyasit, S. & Chinviriyasit, W. Numerical modelling of an SIR epidemic model with diffusion. Appl. Math. Comput. 216(2), 395–409 (2010).
Khan, H., Ahmed, S., Alzabut, J., Azar, A. T. & Gómez-Aguilar, J. F. Nonlinear variable order system of multi-point boundary conditions with adaptive finite-time fractional-order sliding mode control. In. J. Dyn. Control 12, 2597–2613. https://doi.org/10.1007/s40435-023-01369-1 (2024).
AL-Husseiny, H.F., Ali, N.F. & Mohsen, A.A. The effect of epidemic disease outbreaks on the dynamic behavior of a prey-predator model with Holling type II functional response. Commun. Math. Biol. Neurosci.2021, article ID 72 (2021).
Laarabi, H., Rachik, M., Kahlaoui, O. E. & Labriji, E. H. Optimal vaccination strategies of an SIR epidemic model with a saturated treatment. Univ. J. Appl. Math. 1, 185–191 (2013).
Earn, D. J. D., Rohani, P. & Grenfell, B. T. The effect of vaccination on the dynamics and control of infectious diseases. Nature 407, 430–434 (2000).
Pazy, A. Semi-groupes d’opérateurs linéaires et applications aux équations aux dérivées partielles. Sci. Math. Appl. Est Ce Que Je https://doi.org/10.1007/978-1-4612-5561-1 (1983).
Anderson, R. M. & May, R. M. Infectious Diseases of Humans: Dynamics and Control (Oxford University Press, 1992).
Soulaimani, S., Kaddar, A. & Rihan, F. A. A spatio-temporal infection epidemic model with fractional order, general incidence, and vaccination analysis. Sci. Afr. 26, e02349 (2024).
Bandekar, Shraddha Ramdas, Ghosh, Mini, & Rajivganthi, C. Impact of vaccination on the dynamics of COVID-19: A mathematical study using fractional derivatives. Int. J. Biomath. 17-02-2350018 (2024)
Djilali, S. & Bentout, S. Global dynamics of SVIR epidemic model with distributed delay and imperfect vaccine. Results Phys. (2021).
Yaseen, R.M., Mohsen, A.A., Al-Husseiny, H.F., & Hattaf, K. Stability and Hopf bifurcation of an epidemiological model with effect of delay the awareness programs and vaccination: analysis and simulation. Commun. Math. Biol. Neurosci.2023, article ID 32 (2023).
Duan, X., Yuan, S. & Li, X. Global stability of an SVIR model with age of vaccination. Appl. Math. Comput. 226, 528–540 (2014).
Yogeesh, N., Mohammad, S. I., Divyashree, J., Raja, N., Vasudevan, A. & Long, H. Pesticide residue induced hepatotoxicity: determination for animal studies based on fuzzy logic. Appl. Math. 19(2), 365–378 (2025).
Acknowledgements
Manar A. Alqudah: Princess Nourah bint Abdulrahman University Researchers Supporting Project number (PNURSP2025R14), Princess Nourah bint Abdulrahman University, Riyadh, Saudi Arabia. A.K and T.A would like to thank Prince Sultan University for paying the APC and support through TAS research lab.
Author information
Authors and Affiliations
Contributions
A, B and D: Writing-original draft, Resources, Investigation, Formal analysis. D and E: Writing-review & editing, Software, Methodology. B, D and F: Review & Supervision, Formal analysis.
Corresponding authors
Ethics declarations
Competing interests
The authors declare no competing interests.
Additional information
Publisher’s note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution-NonCommercial-NoDerivatives 4.0 International License, which permits any non-commercial use, sharing, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if you modified the licensed material. You do not have permission under this licence to share adapted material derived from this article or parts of it. The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by-nc-nd/4.0/.
About this article

Cite this article
Darazirar, R., Mohsen, A.A., Khan, A. et al. Mathematical exploration of a diffusive infection’s dynamics and simulation. Sci Rep 15, 31433 (2025). https://doi.org/10.1038/s41598-025-09761-x
Received:
Accepted:
Published:
DOI: https://doi.org/10.1038/s41598-025-09761-x
