
Abstract
The tendency of wildlife to associate with humans spatially and temporally, i.e., to overlap with humans, is a key factor mediating human-wildlife coexistence in cities. While direct human influence (e.g., food subsidies) is recognized as a mechanism of wildlife overlap with humans, the role of broader urban ecosystem characteristics (e.g., habitat availability, human sociodemographics) in shaping this behavior is a burgeoning area of research. We analyzed the relationship between environmental and societal characteristics and overlap with humans in coyotes, a species of management concern due to emerging human-coyote conflicts in cities across North America. Using high-resolution GPS data from coyotes in the Chicago metropolitan area, we estimated overlap by quantifying coyotes’ spatial selection for human population density during periods of temporal overlap, i.e., periods when coyotes and humans were active. On average, coyotes exhibited high overlap, evidenced by their selection for areas of high human population density during periods of temporal overlap, but with substantial individual variation in this selection. Importantly, the mean level of overlap depended on environmental characteristics. Selection for human population density was negatively associated with the level of impervious surface cover and positively associated with the presence of land uses containing natural habitat features (e.g., parks, golf courses, vacant lots). Coyote selection for human population density was not significantly associated with median income or the proportion of white residents. Our results suggest that natural habitat features in densely populated areas may be hotspots for human-coyote interactions. Efforts to manage human-coyote interactions should focus on these areas and identify individual traits that heighten coyote overlap with humans.
Similar content being viewed by others


Introduction
In an increasingly human-dominated world, the relative tendency of wildlife to associate with humans spatially and temporally (herein referred to as ‘overlap’) is an essential trait influencing wildlife fitness1. Willingness to overlap with humans can reduce the cost of unnecessary avoidance behaviors and provide access to resources (e.g., food, refuge) that might otherwise be inaccessible due to human presence2,3. People can also benefit from increased spatial and temporal overlap with wildlife, often through psychological effects like reduced stress resulting from human-wildlife interactions (HWI)4,5. However, wildlife overlap with humans can lead to conflict. For humans, costs associated with conflict are frequently experienced in the form of property damage or attacks on domestic animals6,7. Wildlife often experience more severe effects, especially when conflicts increase people’s support for management policies that harm wildlife welfare, reproduction, and survival8,9. Therefore, identifying the determinants of overlap is key to promoting sustainable human-wildlife coexistence.
Diagnosing the environmental factors contributing to elevated overlap in wildlife has become increasingly important in cities where urban expansion and wildlife adaptations to urbanization are resulting in more frequent HWIs10. In social-ecological systems like cities, ecological processes are influenced by both natural and societal factors11. Among the natural factors influencing overlap, the abundance of natural (i.e., not produced by humans) habitat features and resources—likely plays a critical role. In urban areas, where natural features are scarce, animals often adapt by incorporating human infrastructure and food subsidies into their ecologies12. This provides opportunities for learning mechanisms (e.g., habituation to human presence, associative conditioning of humans and food) to intensify an animal’s association with humans13,14. Additionally, a lack of natural habitat features can adversely affect wildlife condition (e.g., increased susceptibility to disease, nutritional deficits) which may drive the use of human subsidies or refuge out of necessity15.
Classism and racism are two societal systems that are emerging as important predictors of urban wildlife ecology16. This is partly attributed to the influence these systems have on the institutions and policies that structure urban environments resulting in a disproportionate concentration of areas like city parks, golf courses, and greenways in wealthier areas with predominantly white residents17. Therefore, animals in low-income or racialized communities (i.e., communities composed primarily of people who experience systemic oppression based on their race) are less likely to have adequate natural habitat which may increase their association with humans through the increased use of anthropogenic food resources and refuge. Conversely, wealth has been linked to individual human behaviors that attract wildlife to residential areas. Some studies show wealthier homeowners are more likely to maintain features like native plants, edible gardens, and compost due to their greater economic resources, larger property sizes, and more leisure time18,19. Additionally, broad-scale habitat features in wealthier and predominantly white communities may support higher-density wildlife populations, leading to increased competition for natural resources and a greater reliance on anthropogenic resources by less competitive individuals20,21. Thus, overlap may be high in low-income areas and racialized communities due to a lack of broad-scale natural habitat features, or, conversely, animals may show greater overlap with humans in wealthy areas due to increased competition and attraction to residential properties.
In this study, we evaluated the relationship between environmental and societal factors and overlap in the coyote, a species of high management interest. Over the past century, coyotes have undergone a significant range expansion and now inhabit most major cities in North America, where they are often the largest carnivore22. Like many other mammalian carnivores, coyotes generally exhibit a strong avoidance of humans both spatially and temporally by using open spaces with relatively low human presence (e.g., golf courses, urban parks, railroads) and decreasing their activity during the day when humans are most active23. However, in some individuals, this avoidance is dimished24. These animals can be seen foraging in high human-use areas during the day and even approaching humans, increasing potential opportunities for negative interactions with, or in rare cases, even attacks on, people to occur25,26. Even neutral encounters with coyotes can engender fear in people and provoke calls for ineffective and inhumane coyote population control27,28. Thus, identifying determinants of coyote overlap is key for informing management interventions that improve human-coyote coexistence as coyote populations continue to grow. There is evidence that coyotes and human-coyote interactions occur more frequently in wealthier areas21,29,30 and that land use features impact how coyotes respond to direct encounters with humans31,32. However, to our knowledge, the combined influence of environmental and societal characteristics on coyote overlap remains less well understood.
We assessed coyote overlap using location data from coyotes fitted with GPS-collars as part of a long-term ecological project in the Chicago metropolitan area (CMA). To account for the temporal component of coyote overlap with humans, we subset the data to retain only GPS locations recorded during periods of elevated human activity when coyotes were also active. We then used a novel application of step-selection analysis (SSA)—a habitat selection method that estimates selection by comparing the characteristics of used and available locations—to evaluate coyote selection for human population density, i.e., the spatial component of coyote overlap with humans33. To evaluate the relationships between environmental (i.e., impervious surface cover, open space) and societal (i.e., median income, the proportion of white residents) characteristics and overlap, we analyzed the interaction between selection for each of these characteristics and selection for human population density. A significant interaction term indicated that selection for high population density areas was dependent on the animal’s use of the environmental or societal characteristic, i.e., overlap varied with the level of the characteristic in the landscape.
We hypothesized that coyote overlap with humans is driven by the availability of both natural and anthropogenic resources. We predicted that (1) overlap would be lower in areas with more broad-scale habitat features that provide natural resources (i.e., open space, permeable surface cover). Therefore, we expected the SSA to yield a negative estimate for the interaction between selection for human population density and open space, and a positive estimate for the interaction between selection for human population density and impervious surface cover. We predicted that (2) overlap would be higher in low-income areas and racialized communities due to limited natural habitat features. We expected the SSA to yield negative estimates for the interaction terms between selection for human population density and median income, and between selection human population density and the proportion of white residents.
Alternatively, we predicted that (3) overlap would be higher in areas with more broad-scale habitat features because of increased competition over natural resources. In this scenario, we expected a positive interaction estimate between selection for human population density and open space, and a negative estimate for the interaction between selection for human population density and impervious surface cover. We had an additional alternative prediction that (4) overlap would be higher in wealthier areas and predominantly white communities that tend to have more abundant broad-scale habitat features and resources on residential properties. Accordingly, we expected the SSA to yield positive estimates for the interactions between selection for human population density and median income, and between selection for human population density and the proportion of white residents.
Results
Main effects of environmental and societal characteristics on selection
The 100 m model was the best fitting of the three models used to test spatial scales (30 m, 100 m, and 500 m), based on Akaike information criterion (AIC; Supplementary Table S2). The model’s main effects estimated the population-level selection for or avoidance of the environmental and societal characteristics during periods of high human activity when the animals were active (Fig. 1a; estimates in yellow). Coyotes exhibited significant selection for open space (Fig. 1a; see Supplementary Table S2 for fixed-effects summary). Based on model predictions with population density held at its mean (1452 people/km2), the animals were 5.2 times more likely to select locations surrounded by open space (i.e., 100% open space within 100 m) compared to locations surrounded by other land use types. Coyote selection was not significantly associated with impervious surface cover, median income, or the proportion of white residents (Fig. 1a; Supplementary Table S2).

Step-selection model estimates. Main effects not estimating overlap are in yellow. Estimates of overlap are in purple. Fixed-effect coefficients and 95% confidence intervals (a) overlapping zero (gray dashed line) indicate no association with coyote selection, positive coefficients indicate selection for that characteristic, and negative coefficients indicate avoidance. Individual-level variances (b) illustrate the variation in selection responses among coyotes.

Relative selection strength and 95% confidence intervals for significant interaction terms between (a) the proportion of open space within 100 m and population density and (b) the proportion of impervious surface cover within 100 m and population density. Relative selection strength was calculated using a population density of 0 people/km2 as the reference value. All characteristics not included in the focal interaction term were fixed at their mean.
Spatiotemporal overlap
The main effect of population density estimated coyote selection for human population density during periods of high human activity, while the animal was active, i.e., the animal’s overlap. The interaction terms estimated the association of environmental and societal characteristics with overlap. Coyotes exhibited significant selection for human population density, indicating a high level of overlap among coyotes who were active during periods of elevated human activity (Fig. 1a; Supplementary Table S2). Model predictions showed the coyotes were 4.6 times more likely to choose locations with average population densities than areas with zero population density. Furthermore, there was substantial individual variation in overlap (Fig. 1b) with individual selection coefficient estimates ranging from − 2.32 to 2.42.
There was a significant positive interaction between open space and population density, meaning that as selection for open space increased so did overlap (Fig. 1a; Supplementary Table S2). Relative selection strength (i.e., the ratio of selection estimates for areas of average population density and areas with zero population density) was 1.8 times higher in areas with moderate open space (i.e., 50% open space within 100 m) than areas with low open space (i.e., 10% open space within 100 m; Fig. 2a). There was a significant negative interaction between impervious surface cover and population density (Fig. 1a; Supplementary Table S2). Relative selection strength was 5.3 times lower in areas with moderate impervious surface cover (i.e., 50% impervious within 100 m) compared to areas with low impervious cover (i.e., 10% impervious cover within 100 m; Fig. 2b).
Discussion
Wildlife overlap with humans is a key trait mediating urban wildlife fitness and HWI. Thus, understanding the dynamics of this association is essential for managing human-wildlife coexistence in cities, particularly for large carnivores like coyotes. Using movement data from coyotes in the CMA, we found high levels of overlap and substantial individual variation in overlap. Overlap was also significantly associated with environmental characteristics, but not human sociodemographics. Specifically, coyotes exhibited more overlap in areas with open space (e.g., parks, golf course, vacant lots) and permeable surface cover. Our results suggest that areas with natural habitat features may be hotspots for human-coyote interactions. Efforts to manage human-coyote coexistence will likely benefit from focusing on intersections between open space and densely populated areas as well as identifying individual traits that cause certain coyotes to exhibit high overlap.
While the main effects of the SSA were not the central interest of this study, they provide insights into how active coyotes navigate the CMA during periods of high human activity. Open spaces like parks, golf courses, and vacant lots provide natural habitat features to wildlife that are otherwise scarce in urban settings34,35,36. Consistent with previous research on the spatiotemporal use of the landscape by coyotes in the CMA, coyotes in this study exhibited selection for open spaces37,38, likely because patches of unmanaged vegetation and relatively low human activity in these areas offer refuge from human detection. Interestingly, impervious surface cover was not significantly associated with coyote selection suggesting that people’s use of open space, or lack thereof, is more important for selection than land cover alone. Additionally, we found no evidence that median income or the proportion of white residents influenced coyote selection in the CMA. Importantly, our data was subset to examine temporally fine-scale active movement during periods of high human activity. These variables may not influence coyote ecology in this spatial or temporal context; however, evidence indicates that wealth influences other aspects of coyote ecology (e.g., occurrence and survival)21,39.
Coyotes face unique challenges in coexisting with people due to extensive efforts to eradicate them from shared landscapes. Generally, they have adapted by avoiding areas with high human presence or adopting nocturnal activity patterns to minimize encounters23. However, coyote overlap with humans can shift in response to changes in the costs and benefits of associating with humans. A longitudinal study of coyotes on an Army base in Colorado, found that coyotes increased their diurnal activity after direct persecution by ranchers and Army helicopter gunning subsided40. Coyotes can also adjust their behavioral responses in relation to specific aspects of human activity41. For instance, coyotes in Santa Cruz, California exhibited spatial avoidance of human infrastructure, but only temporal avoidance of human presence in natural areas, likely because the use of hiking trails in natural areas allowed for more energetically efficient travel42.
In the CMA, coyotes that were active during periods of elevated human activity exhibited selection for areas of high human density. This finding suggests that there are benefits linked to human presence that cause these animals to increase their overlap. One potentially substantial benefit is access to human food subsidies, which tend to be more energetically dense than natural resources, and therefore, have been associated with reduced activity and space use in carnivores43. Proximity to humans can also benefit coyotes when urban infrastructure provides refuge, e.g., dens, for urban coyotes44. While high overlap was observed in our study, we caution against generalizing this result to the broader coyote population in the CMA. Because we omitted data recorded when the animals were resting during periods of high human acitvity, we excluded animals exhibiting low overlap via temporal partitioning. Nevertheless, high overlap among the animals in our study may still increase the likelihood of human-coyote encounters.
We also observed substantial individual variation in overlap, which may reflect the heterogenous distribution of human subsidies in the environment and/or the influence of individual traits (e.g., reproductive status, cognitive abilities, personality)25. Diet may be a key characteristic influencing overlap where these two mechanisms converge. Coyotes in the CMA show considerable variation in the proportion of food subsidies they consume, even in highly urbanized areas45. Fine-scale heterogeneity in resources (e.g., residences that feed animals outdoors or have coyote-accessible trash receptacles), in combination with individual traits (e.g., diet preference, hunting ability), may interact to produce varying degrees of overlap among individuals. Examining the relationship between diet and overlap—along with other traits such as reproductive status and condition—may help wildlife managers identify coyotes at risk of engaging in human-coyote conflict. Furthermore, if traits associated with overlap are heritable, this variation could shape evolutionary trajectories, potentially increasing the prevalence of behaviors that either facilitate coexistence or exacerbate conflict with humans1,46.
Protective cover, like vegetation, increases the use of human-dominated areas in some mammalian carnivores42,47. Consequently, areas where natural habitat features are in proximity to humans may experience high levels of HWI. In agricultural systems, livestock depredation is frequently associated with proximity to and abundance of natural habitat, with researchers suggesting that the cover provided by natural habitat facilitates predators’ forays into grazing areas by minimizing their risk of detection by humans48,49. In cities, juxtapositions of natural and developed land may intensify overlap if these areas increase wildlife’s exposure to various human stimuli or anthropogenic resources. While there is no direct evidence of this to our knowledge, overlap tends to be higher in areas with human disturbance31,50. Urban animal’s heightened overlap may be due to the phenotypic filtering of temperaments; (i.e., if wildlife who have a propensity to overlap with humans are more likely to move into and/or survive in urban habitat). However, in a species with high behavioral plasticity like the coyote, these edge habitats likely play a role in modulating cognition that potentially bolsters habituation towards humans. In the CMA, coyotes were more likely to select high density areas with open space than high density areas without open space. Moreover, they were more likely to select high-density areas over low-density areas when open space was present in both. In contrast, impervious surface cover was negatively associated with overlap—coyotes avoided high-density areas with impervious surfaces but used low- and high-density areas with permeable surfaces equally. Our results, along with the previously demonstrated relationship between survival and population density39, suggest that adequate cover may allow coyotes to avoid human detection and increase access to benefits associated with human presence. While high population density may be the mediator of this interaction, i.e., population density causes stronger selection for open space by coyotes; the implications for human-coyote coexistence management remain the same: these areas are more likely to experience human-coyote interactions.
In many cities, wealth and the proportion of white residents are positively associated with environmental amenities, including tree canopy cover, public green spaces, and residential property habitat features17,18,20. These amenities can influence wildlife’s association with humans, as they are often selected by wildlife in urban spaces51. Research exploring the relationship between wealth and human-coyote interactions has revealed a positive association between wealth and the likelihood of interactions, with authors suggesting that more abundant resources and fewer environmental disamenities (e.g., pollutants) in wealthier areas as potential mechanisms21,29. Our study is one of the first to examine sociodemographic characteristics and coyote behavior; however, income and race were not significant predictors of coyote overlap in the CMA. The lack of significant associations may reflect regional variation in how wealth and race are associated with wildlife resources and refuge availability. While the abundance of green space and tree cover tends to increase with income in the CMA, some of the wealthiest and whitest neighborhoods are the most developed where there is limited public and private green space. Regional effects have been observed in other urban areas where climatic, cultural, and economic characteristics produce patterns dissimilar to the general trends between income and the environment reported in the literature20,52. Thus, regional characteristics should be considered when designing social-ecological studies to account for counterintuitive relationships.
The study sample included a disproportionate number of males, partly due to the minimum weight requirement for GPS collar deployment. Although we did not assess the influence of sex on coyote overlap, previous research indicates that coyotes do not exhibit substantial sex differences in overall movement patterns53,54 or in responses to encounters with humans55,56. These findings suggest that our results are unlikely to be skewed by this sex bias.
Importantly, it remains to be determined whether management intervention is necessary to address the coyote overlap observed in this study. While increased overlap can lead to negative outcomes for people when coyotes create risks for domestic animals or humans, they can also be important opportunities for increasing coexistence. Previous experience with wildlife is often a predictor of attitudes towards wildlife, with repeated neutral or positive encounters with a species sometimes increasing people’s tolerance for them57. Future research may benefit from categorizing overlap to identify individuals that are likely to engage in costly HWI vs. animals whose presence may provide opportunities for increasing human’s positive perceptions of coyotes58. Additionally, uncovering people’s perceptions and attitudes towards encounters with coyotes is imperative for determining the effect these animals have on human-coyote coexistence. Research on the human dimensions of these interactions should consider all stakeholders affected by coyotes59,60. HWI research can only address the historical, disproportionate burden of environmental disamenities experienced by marginalized communities by working directly with members of those communities to understand their experiences and perspectives. With an increasing number of studies exploring these relationships, we are beginning to move towards a more inclusive, and therefore more complete, understanding of HWIs in cities.
Methods
Study system
The CMA is one of the most populous metropolitan areas in North America and consists of mostly residential, commercial, and industrial land uses with a system of nature preserves that makes up 11% of the land cover61. Coyotes occur throughout the CMA, including the most heavily urbanized areas, but densities are particularly high within large natural fragments37,53. Previous research reported on the space use of coyotes within the CMA as part of a long-term ecological project. However, during the early stages of the Chicago project, coyotes were monitored primarily in the north and northwest suburban areas of the CMA. So, whether those patterns were reflective of the full range of communities was poorly understood. Consequently, in the last decade, we expanded the fieldwork to incorporate a more complete representation of the CMA, with the goal of adding sociodemographic strata to our analyses.
Animal capture and data collection
Animals in this study were captured between 2008 and 2023 using foot-hold traps or cable restraints53. After the animals were captured, they were immobilized with Telazol and fitted with GPS collars. Once the animal recovered, they were released the same day at the site of capture. We expected human population density to directly influence coyote movement decisions at relatively fine spatial scales. To capture this, we programmed the GPS collars to record locations at a high temporal resolution—every 15 min—for 24-hour periods every two weeks. We included data from 54 coyotes which included 44 males and 10 females (Supplementary Table S1). The mean number of steps (i.e., two consecutive locations) per individual was 1149 steps (SD: 628) and the mean tracking period was 221 days (SD: 107) (Supplementary Table S1). All procedures were approved by Ohio State University’s Institutional Animal Care and Use Committee (Protocol Nos. 2006A0245, 2010A00000113, 2013A00000012). We conducted all methods in accordance with the approved protocols, the United States National Institutes of Health Public Health Service Policy on Humane Care and Use of Laboratory Animals, and the Guide for the Care and Use of Laboratory Animals.
Environmental and societal characteristics
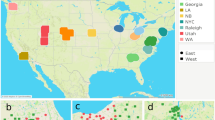
We created a GIS raster that included layers for each of the environmental and human societal characteristics (Fig. 3). The open space raster was generated using land use data from the Chicago Metropolitan Agency for Planning’s Land Use Inventory61. Open space included, nature preserves, parks, golf courses, and cemeteries as well as areas used for utility infrastructure (e.g., transmission tower), railroad tracks, and vacant lots. They include features like vegetation cover and low human activity making them a potentially valuable habitat in the CMA. The impervious surface cover raster was generated using the National Land Cover Database Impervious Descriptor which estimates percent of roads and other built surfaces in 30 m2 cells across the study area62. We rasterized the parcel-level land use data to a resolution of 30 m in QGIS63 to match the 30 m resolution of the land cover data. The active steps, recorded during periods of high human activity, had an average length of 400 m (SD: 299 m). Thus, we expected a 30 m resolution to be appropriate for detecting selection of these characteristics. We extracted values from the open space and impervious surface cover rasters at each coyote GPS location to be used as predictors in the SSA.

Spatial distributions of environmental and societal characteristics. Coyote GPS locations are represented in yellow (a). The minimum convex hull of all coyote locations is represented in black. Land use types (b) are represented at the parcel level and include open space (i.e., nature preserves, parks, golf courses, cemeteries, utility infrastructure, transportation infrastructure, and vacant lots) and other land use uses. Land cover (c) includes impervious surface cover and other land cover types. Societal characteristics include population density (d) represented as the number of residents per km2, median household income of census block groups (e) and the proportion of white residents in census block groups (f).
Societal characteristics were extracted from the United States Census Bureau (201064, 202065 and the package tidycensus in R66,67. It was important that population density was extracted at the finest resolution possible because we expected it to directly influence coyote movement decisions at the 15-minute sampling frequency. We extracted population density data from the 2010 or 2020 Decennial Census database at the block level, based on the temporal proximity of each location to the Census data. Census blocks are the smallest sampling units with a mean block area of 0.013 km2 (range: <0.01–8.4 km2) in the study region. Census blocks are delineated according to boundaries like roads, other transportation infrastructure, and geological features which tend to be associated with changes in land use and development and, consequently, changes in population density68. In densely populated areas, Census blocks are often the size of city blocks. Some Census blocks, such as those consisting of railroads or parks, contain no human residents. To minimize the loss of these often small and irregularly shaped areas due to rasterization error, we rasterized the data at a 5 m resolution, assigning each raster cell the population density value of the Census block in which it was located. We did not further screen for uninhabited areas within populated blocks—such as parking lots—so these areas were also assigned the population density value of their respective block.
The proportion of white residents and median income were expected to have indirect effects on coyote movement due to their larger scale effects on resource availability and human behavior. These were obtained from the American Community Survey database at the block-group level (mean: 0.48 km2, range: <0.1–96 km2)69. We rasterized these data in QGIS to a resolution of 30 m to match the resolution of the environmental characteristics. To avoid omitting data in areas with no residents where wealth and race are likely to affect the ecological conditions, e.g. urban parks, we performed a nearest-neighbor interpolation on the median income and proportion of white residents rasters. We used a simple kriging model with a large window of 100 neighbors. The kriging model assigns values to cells with missing data based on the values and weights of neighboring cells within the defined window. It uses the spatial arrangement of observed values to weight cells neighboring the interpolated location so that the values of cells closest to the interpolated location are weighted more heavily which accounts for spatial autocorrelation commonly observed in these variables.
There were disparities in the frequency of the environmental and societal values in the study region and the frequency of values in the sample of coyote GPS locations (Supplementary Fig. S1). It is possible that this discrepancy was a result of the distribution of coyotes in the region. For example, the high frequency of the locations in open space may reflect coyotes’ preference for natural habitat. However, the accessibility of trapping sites across the region likely plays an important role in this discrepancy. Our efforts to GPS collar animals in low-income areas and in racialized communities resulted in comparable frequencies in the low end of these characteristics’ distributions. Still, areas with high population densities, a high proportion of white residents, and moderate median incomes are underrepresented in our sample which may increase the uncertainty of model estimates and reduce the predictive power of the model.
To determine what spatial scale best predicted overlap, we calculated the proportion of open space cells and impervious surface cover cells that fell within 100 m and 500 m radii of each location. For societal characteristics, median income and the proportion of white residents, we calculated the mean value in 100 m and 500 m radii of each location. We describe our methods for identifying the best model among these different spatial scales (30 m, 100 m, and 500 m) below.
Criteria for Coyote overlap with humans
In this study, we define overlap as a coyote’s temporal and spatial association with humans. There are three characteristics of coyote movement behavior that are indicative of overlap: (1) the behavior occurs when humans are active (2) the animal is active (i.e., the animal is not resting, a behavior used to avoid humans temporally) and (3) the animal is near humans. To account for the temporal component of overlap, we subset the coyote movement data to the period of highest human activity (6:00 to 20:00) which was determined by averaging hourly vehicular traffic data collected from locations across the study site by the Illinois Department of Transportation70. Next, we filtered the data to only include active steps, i.e., steps where the animal was moving. Steps were considered active, and retained for analysis, if the animal’s travel speed between the two locations exceeded 75 m per 15 min—well above the mean location error reported in previous studies of GPS collar location error71,72,73. Inactive steps, those with speed less 75 m per 15 min, were excluded from the analysis.
Estimating overlap
To evaluate the relationship between overlap and the environmental and societal characteristics, we conducted an SSA. Unlike traditional resource selection functions which assume that used locations are independent, SSA accounts for autocorrelation among sequential locations by modeling them as steps and comparing used steps to ‘available’, or unused, steps which vary along the animal’s path74,75. Ten available steps were generated for each used step using the same origin as the used step and randomly selecting from parametric distributions of the step lengths and turning angles of each coyote in the amt package in R76. The ratio of available to used steps, along with the temporal and spatial constraints on available steps in SSA, helps minimize estimation errors caused by false available locations (i.e., locations that were used by the animal but not recorded)77. We used the R package glmmTMB78 to fit a conditional Poisson model. The conditional Poisson model accounts for variation among sets of used and available steps by estimating a random intercept for each set, thereby relaxing the traditional Poisson assumptions of event independence and equal mean and variance79. The model does assume a non-negative integer response variable, which our data satisfy.
We included a main effect for the environmental and societal characteristics, including population density, along with interaction terms between population density and each characteristic to assess their association with overlap. Although higher-order interactions may exist among these characteristics, we limited our analysis to first-order interactions between environmental and societal characteristics and overlap, for which we had strong a priori hypotheses. We included a random intercept for sets of used and available locations to account for variation among the sets and random slopes to estimate individual-level variation in fixed effects, following the methods of Muff et al.75. Continuous variables were standardized to have a mean of zero and a standard deviation of one.
Because movement behavior may differ between resident (i.e., individuals belonging to a mated pair or pack) and transient (i.e., solitary) coyotes, we analyzed their data separately. We categorized individuals as resident or transient based on their movement patterns, reproductive activity, and visual associations with other coyotes according to methods described by Ellington and Gehrt37. However, there were not significant differences in the estimates of the models, so we combined data from residents and transients in the final model (see Supplementary Table S3 for transient and resident model summaries).
The fit of the various scale models (30 m, 100 m, and 500 m) were evaluated using AIC (see Supplementary Table S2 for model summaries and comparisons). Our goal was inference, i.e., to identify whether the environmental and societal characteristics were significantly associated with overlap. Thus, rather than using stepwise model selection—which can produce biased parameter estimates— to find the most predictive model, we evaluated scale using models that included all environmental and societal variables, along with their interactions with population density80,81. We used a global model following the recommendation of Northrup et al.82, who argue that model parsimony is less critical with large GPS movement datasets, as increased sample size permits the estimation of numerous parameters without inflating uncertainty.
Interpreting model estimates
The main effect of population density on selection is an estimate of overlap because it is estimating selection for population density during the day while the animals are active – the three components of overlap defined in this study. However, the interaction terms address what we are most interested in - how the animal’s use of environmental and societal characteristics is associated with their selection for population density when moving during the day, i.e., their overlap. A negative interaction term, for instance between median income and population density, indicates that coyotes use of wealthier areas is negatively associated with their use of densely populated areas. A positive interaction term indicates that as coyotes use of a characteric increases, so does their use of densely populated areas. Variance inflation factors (VIF) were used to evaluate multicollinearity and were within the acceptable range (VIFs ≤ 2; Supplementary Table S2).
Finally, to illustrate the significant relationships between environmental and societal characteristics and overlap, we calculated the relative selection strength (RSS) for human population density across different levels of each characteristic involved in a significant interaction term. RSS is a transformation of model coefficients that provides a scale-free measure of the strength of selection for a particular covariate83. Unlike raw coefficients, which can be difficult to interpret (especially in models with interactions), RSS expresses the relative likelihood that an animal will select a habitat feature (e.g., human density, vegetation cover) at one value compared to another. We calculated RSS across a range of human population densities at high, low, and moderates values of the focal environmental or societal characteristics, using a population density of 0 people/km² as the reference.
Data availability
The data used in this work are freely downloadable through Data Dryad (DOI: 10.5061/dryad.sn02v6xj2).
References
Barrett, L. P., Stanton, L. A. & Benson-Amram, S. The cognition of ‘nuisance’species. Anim. Behav. 147, 167–177 (2019).
Fehlmann, G., O’riain, M. J., FÜrtbauer, I. & King, A. J. Behavioral causes, ecological consequences, and management challenges associated with wildlife foraging in human-modified landscapes. BioScience 71 (1), 40–54 (2021).
Lowry, H., Lill, A. & Wong, B. B. Behavioural responses of wildlife to urban environments. Biol. Rev. 88 (3), 537–549 (2013).
Buijs, A. & Jacobs, M. Avoiding negativity bias: towards a positive psychology of human–wildlife relationships. Ambio 50 (2), 281–288 (2021).
Uchida, K., Blumstein, D. T. & Soga, M. Managing wildlife tolerance to humans for ecosystem goods and services. Trends Ecol. Evol. 39 (3), 248–257 (2024).
Braczkowski, A. R. et al. The unequal burden of human-wildlife conflict. Communications Biology, 6(1), p.182. (2023).
Soulsbury, C. D. & White, P. C. Human–wildlife interactions in urban areas: a review of conflicts, benefits and opportunities. Wildl. Res. 42 (7), 541–553 (2015).
Liordos, V., Kontsiotis, V. J., Anastasiadou, M. & Karavasias, E. Effects of attitudes and demography on public support for endangered species conservation. Sci. Total Environ. 595, 25–34 (2017).
Schell, C. J. et al. The evolutionary consequences of human–wildlife conflict in cities. Evol. Appl. 14 (1), 178–197 (2021).
Ma, D. et al. Global expansion of human-wildlife overlap in the 21st century. Sci. Adv. 10 (34), eadp7706 (2024).
Pickett, S. T. et al. Urban ecological systems: linking terrestrial ecological, physical, and socioeconomic components of metropolitan areas. Annu. Rev. Ecol. Syst. 32 (1), 127–157 (2001).
Ritzel, K. & Gallo, T. Behavior change in urban mammals: a systematic review. Frontiers in Ecology and Evolution, 8, p.576665. (2020).
Blumstein, D. T. Habituation and sensitization: new thoughts about old ideas. Anim. Behav. 120, 255–262 (2016).
Goumas, M., Lee, V. E., Boogert, N. J., Kelley, L. A. & Thornton, A. The role of animal cognition in human-wildlife interactions. Frontiers in Psychology, 11, p.589978. (2020).
Moran, N. P., Sánchez-Tójar, A., Schielzeth, H. & Reinhold, K. Poor nutritional condition promotes high‐risk behaviours: A systematic review and meta‐analysis. Biol. Rev. 96 (1), 269–288 (2021).
Schell, C. J. et al. The ecological and evolutionary consequences of systemic racism in urban environments. Science, 369 (2020).
Kronenberg, J. et al. Environmental justice in the context of urban green space availability, accessibility, and attractiveness in postsocialist cities. Cities 106, 102862 (2020).
van Heezik, Y. & Hight, S. R. Socio-economic-driven differences in bird-feeding practices exacerbate existing inequities in opportunities to see native birds in cities. J. Urban Ecol. 3, jux011. https://doi.org/10.1093/jue/jux011 (2017).
Lerman, S. B. & Warren, P. S. The conservation value of residential yards: linking birds and people. Ecol. Appl. 21 (4), 1327–1339 (2011).
Chamberlain, D. et al. Wealth, water and wildlife: landscape aridity intensifies the urban luxury effect. Glob. Ecol. Biogeogr. 29 (9), 1595–1605 (2020).
Magle, S. B., Lehrer, E. W. & Fidino, M. Urban mesopredator distribution: examining the relative effects of landscape and socioeconomic factors. Anim. Conserv. 19 (2), 163–175 (2016).
Hody, J. W. & Kays, R. Mapping the expansion of coyotes (Canis latrans) across North and Central America. ZooKeys, (759), p.81. (2018).
Gehrt, S. D., Riley, S. P. & Cypher, B. L. Urban Carnivores (Johns Hopkins university, 2010).
Young, J. K., Hammill, E. & Breck, S. W. Interactions with humans shape Coyote responses to hazing. Sci. Rep. 9 (1), 1–9 (2019).
Baker, R. O. & Timm, R. M. Coyote attacks on humans, 1970–2015: implications for reducing the risks. Human–Wildlife Interactions, 11(2), p.3. (2017).
White, L. A. & Gehrt, S. D. Coyote attacks on humans in the united States and Canada. Hum. Dimensions Wildl. 14 (6), 419–432 (2009).
Siemer, W. F., Decker, D. J., Shanahan, J. E. & Wieczorek Hudenko, H. A. How do suburban coyote attacks affect residents’ perceptions? Insights from a New York case study. Cities and the Environment (CATE), 7(2), p.7 (2014).
Niesner, C. A., Kelty, C. & Robins, S. The Coyote in the cloud. Environment Plann. E: Nat. Space 7(3), 1054–1075. https://doi.org/10.1177/25148486241229011 (2024).
Wilkinson, C. E., Caspi, T., Stanton, L. A., Campbell, D. & Schell, C. J. Coexistence across space and time: Social-ecological patterns within a decade of human‐coyote interactions in San Francisco. People Nat. 5 (6), 2158–2177 (2023).
Wine, S., Gagné, S. A. & Meentemeyer, R. K. Understanding Human-Coyote Encounters in Urban Ecosystems Using Citizen Science Data: What Do Socioeconomics Tell Us? Environmental Management, 55(1), p.159. (2015).
Breck, S. W., Poessel, S. A., Mahoney, P. & Young, J. K. The intrepid urban coyote: a comparison of bold and exploratory behavior in coyotes from urban and rural environments. Scientific reports, 9(1), p.2104. (2019).
Golden Beam, E. R., Berger, J., Breck, S. W., Schell, C. J. & Lambert, J. E. Habituation and tolerance in Coyotes (Canis latrans), a flexible urban predator. Wildl. Lett. 1 (4), 153–162 (2023).
Thurfjell, H., Ciuti, S. & Boyce, M. S. Applications of step-selection functions in ecology and conservation. Mov. Ecol. 2, 1–12 (2014).
Anderson, E. C. & Minor, E. S. Vacant lots: an underexplored resource for ecological and social benefits in cities. Urban Forestry Urban Green. 21, 146–152 (2017).
Wurth, A. M., Ellington, E. H. & Gehrt, S. D. Golf courses as potential habitat for urban Coyotes. Wildl. Soc. Bull. 44 (2), 333–341 (2020).
Vasquez, A. V. & Wood, E. M. Urban parks are a refuge for birds in park-poor areas. Frontiers in Ecology and Evolution, 10, p.958572. (2022).
Ellington, E. H. & Gehrt, S. D. Behavioral responses by an apex predator to urbanization. Behav. Ecol. 30 (3), 821–829 (2019).
Gehrt, S. D., Brown, J. L. & Anchor, C. Is the urban coyote a misanthropic synanthrope? The case from Chicago. Cities and the Environment (CATE), 4(1), p.3. (2011).
Zepeda, E., Sih, A., Schell, C. J. & Gehrt, S. Impacts of urban heterogeneity in environmental and societal characteristics on coyote survival. Urban Ecosystems, 28(1), p.59. (2025).
Kitchen, A. M., Gese, E. M. & Schauster, E. R. Changes in Coyote activity patterns due to reduced exposure to human persecution. Can. J. Zool. 78 (5), 853–857 (2000).
Gallo, T. et al. Mammals adjust diel activity across gradients of urbanization. Elife 11, e74756 (2022).
Nickel, B. A., Suraci, J. P., Allen, M. L. & Wilmers, C. C. Human presence and human footprint have non-equivalent effects on wildlife spatiotemporal habitat use. Biological Conservation, 241(August 2019), 108383. (2020).
Newsome, T. M. et al. The ecological effects of providing resource subsidies to predators. Glob. Ecol. Biogeogr. 24 (1), 1–11 (2015).
Niesner, C. A., Blakey, R. V., Blumstein, D. T. & Abelson, E. S. Wildlife affordances of urban infrastructure: A framework to understand human-wildlife space use. Frontiers in Conservation Science, 2, p.774137. (2021).
Newsome, S. D., Garbe, H. M., Wilson, E. C. & Gehrt, S. D. Individual variation in anthropogenic resource use in an urban carnivore. Oecologia 178, 115–128 (2015).
Caspi, T., Johnson, J. R., Lambert, M. R., Schell, C. J. & Sih, A. Behavioral plasticity can facilitate evolution in urban environments. Trends Ecol. Evol. 37 (12), 1092–1103 (2022).
Suraci, J. P. et al. Behavior-specific habitat selection by African lions May promote their persistence in a human‐dominated landscape. Ecology 100 (4), e02644 (2019).
König, H. J. et al. Human–wildlife coexistence in a changing world. Conserv. Biol. 34 (4), 786–794 (2020).
Kuiper, T., Loveridge, A. J. & Macdonald, D. W. Robust mapping of human–wildlife conflict: controlling for livestock distribution in carnivore depredation models. Anim. Conserv. 25 (2), 195–207 (2022).
Samia, D. S., Nakagawa, S., Nomura, F., Rangel, T. F. & Blumstein, D. T. Increased tolerance to humans among disturbed wildlife. Nature communications, 6(1), p.8877. (2015).
Fisher, J. T., Fuller, H. W., Hering, A., Frey, S. & Fisher, A. C. Black-tailed deer resource selection reveals some mechanisms behind the ‘luxury effect’in urban wildlife. Urban Ecosyst. 27 (1), 63–74 (2024).
Liu, J. et al. Coupled human and natural systems. AMBIO: J. Hum. Environ. 36 (8), 639–649 (2007).
Gehrt, S. D., Anchor, C. & White, L. A. Home range and landscape use of Coyotes in a metropolitan landscape: conflict or coexistence? J. Mammal. 90 (5), 1045–1057 (2009).
Gese, E. M., Morey, P. S. & Gehrt, S. D. Influence of the urban matrix on space use of Coyotes in the Chicago metropolitan area. J. Ethol. 30, 413–425 (2012).
Young, J. K., Mahe, M. & Breck, S. Evaluating behavioral syndromes in Coyotes (Canis latrans). J. Ethol. 33, 137–144 (2015).
Schell, C. J., Young, J. K., Lonsdorf, E. V., Santymire, R. M. & Mateo, J. M. Parental habituation to human disturbance over time reduces fear of humans in Coyote offspring. Ecol. Evol. 8 (24), 12965–12980 (2018).
Hosaka, T., Sugimoto, K. & Numata, S. Effects of childhood experience with nature on tolerance of urban residents toward hornets and wild boars in Japan. PloS One. 12 (4), e0175243 (2017).
Soga, M. et al. How can we mitigate against increasing biophobia among children during the extinction of experience? Biol. Conserv. 242, 108420 (2020).
Harris, N. C., Wilkinson, C. E., Fleury, G. & Nhleko, Z. N. Responsibility, equity, justice, and inclusion in dynamic human–wildlife interactions. Front. Ecol. Environ. 21 (8), 380–387 (2023).
Miriti, M. N., Rawson, A. J. & Mansfield, B. The history of natural history and race: decolonizing human dimensions of ecology. Ecol. Appl. 33 (1), e2748 (2023).
Chicago Metropolitan Agency for Planning (CMAP). CMAP land use inventory for northeastern Illinois. (2015). Available at: http://www.cmap.illinois.gov/data/land-use/inventory
Dewitz, J. National Land Cover Database (NLCD) 2016 Products: U.S. Geological Survey data release. Available at: (2019). https://www.mrlc.gov/
QGIS.org, QGIS Geographic Information System. Open Source Geospatial Foundation Project. (2024). http://qgis.org
Census Bureau, U. S. 2010 Census Summary File 1. (2011). Retrieved from https://www.census.gov
Census Bureau, U. S. 2020 Census Summary File 1. (2021). Retrieved from https://www.census.gov
Walker, K. & Herman, M. tidycensus: Load US Census Boundary and Attribute Data as ‘tidyverse’ and ‘sf’-Ready Data Frames. R package version 1.6.6, (2024). https://walker-data.com/tidycensus/
Core Team, R. R: A Language and Environment for Statistical Computing. R Foundation for Statistical Computing, Vienna, Austria. (2024). https://www.R-project.org/
Rossiter, K. What are census blocks? [Blog post]. U.S. Census Bureau. (2011)., July 11 https://www.census.gov/newsroom/blogs/random-samplings/2011/07/what-are-census-blocks.html
Census Bureau, U. S. American Community Survey 5-Year Estimates (2013–2017). (2018). Retrieved from https://data.census.gov
Illinois Department of Transportation. Daily traffic counts. Ill. Department Transp. (2022). https://www.idot.illinois.gov/
Ganskopp, D. C. & Johnson, D. D. GPS error in studies addressing animal movements and activities. Rangel. Ecol. Manage. 60 (4), 350–358 (2007).
Ironside, K. E., Mattson, D. J., Arundel, T. R. & Hansen, J. R. Is GPS telemetry location error screening beneficial? Wildl. Biology. 2017 (1), 1–7 (2017).
Lewis, J. S., Rachlow, J. L., Garton, E. O. & Vierling, L. A. Effects of habitat on GPS collar performance: using data screening to reduce location error. J. Appl. Ecol. 44 (3), 663–671 (2007).
Fieberg, J., Signer, J., Smith, B. & Avgar, T. A ‘how to’guide for interpreting parameters in habitat-selection analyses. J. Anim. Ecol. 90 (5), 1027–1043 (2021).
Muff, S., Signer, J. & Fieberg, J. Accounting for individual-specific variation in habitat‐selection studies: efficient Estimation of mixed‐effects models using bayesian or frequentist computation. J. Anim. Ecol. 89 (1), 80–92 (2020).
Signer, J., Fieberg, J. & Avgar, T. Animal movement tools (amt): R package for managing tracking data and conducting habitat selection analyses. Ecol. Evol. 9 (2), 880–890 (2019).
Alexander, S. M., Logan, T. B. & Paquet, P. C. Spatiotemporal co-occurrence of Cougars (Felis concolor), wolves (Canis lupus) and their prey during winter: a comparison of two analytical methods. J. Biogeogr. 33, 2001–2012 (2006).
Brooks, M. E. et al. GlmmTMB balances speed and flexibility among packages for Zero-inflated generalized linear mixed modeling. R J. 9 (2), 378–400. https://doi.org/10.32614/RJ-2017-066 (2017).
Armstrong, B. G., Gasparrini, A. & Tobias, A. Conditional Poisson models: a flexible alternative to conditional logistic case cross-over analysis. BMC Med. Res. Methodol. 14, 1–6 (2014).
Smith, G. Step away from Stepwise. J. Big Data. 5, 32. https://doi.org/10.1186/s40537-018-0143-6 (2018).
Whittingham, M. J., Stephens, P. A., Bradbury, R. B. & Freckleton, R. P. Why do we still use Stepwise modelling in ecology and behaviour? J. Anim. Ecol. 75 (5), 1182–1189 (2006).
Northrup, J. M. et al. Conceptual and methodological advances in habitat-selection modeling: guidelines for ecology and evolution. Ecol. Appl. 32 (1), e02470 (2022).
Avgar, T., Lele, S. R., Keim, J. L. & Boyce, M. S. Relative selection strength: quantifying effect size in habitat-and step‐selection inference. Ecol. Evol. 7 (14), 5322–5330 (2017).
Funding
This work was supported by Cook County Animal and Rabies Control, the Max McGraw Wildlife Foundation, Forest Preserve District of Cook County, and the National Science Foundation Graduate Research Fellowship (grant number 1650042 to E.Z.).
Author information
Authors and Affiliations
Contributions
S.D. Gehrt developed data collection design. E. Zepeda, C. J. Schell, A. Sih, and S.D. Gehrt devised the study design. E. Zepeda conducted the statistical analysis and wrote the manuscript. C. J. Schell, A. Sih, and S.D. Gehrt provided comments. All authors approved the final manuscript.
Corresponding author
Ethics declarations
Competing interests
The authors declare no competing interests.
Ethics declaration
All procedures were approved by Ohio State University’s Institutional Animal Care and Use Committee (Protocol Nos. 2006A0245, 2010A00000113, 2013A00000012). Research abided by the United States National Institutes of Health Public Health Service Policy on Humane Care and Use of Laboratory Animals and the Guide for the Care and Use of Laboratory Animals.
Additional information
Publisher’s note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Supplementary Information
Below is the link to the electronic supplementary material.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution-NonCommercial-NoDerivatives 4.0 International License, which permits any non-commercial use, sharing, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if you modified the licensed material. You do not have permission under this licence to share adapted material derived from this article or parts of it. The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by-nc-nd/4.0/.
About this article

Cite this article
Zepeda, E., Sih, A., Schell, C.J. et al. Urban coyote spatiotemporal overlap with humans is associated with environmental characteristics not human sociodemographics. Sci Rep 15, 31597 (2025). https://doi.org/10.1038/s41598-025-16323-8
Received:
Accepted:
Published:
Version of record:
DOI: https://doi.org/10.1038/s41598-025-16323-8
