
Abstract
The rut depth created by off-road vehicles affects vehicle performance and soil compaction, and its accurate prediction is essential to improve vehicle performance and reduce soil compaction. Due to the complex and nonlinear interactions between variables and rut depth, the error in estimating rut depth with conventional methods is significant. Therefore, the present study aims to predict the rut depth created by off-road vehicles in soil using the Categorical Boosting (CatBoost) machine learning algorithm and combining it with three optimization methods, the Gray Wolf Optimization (GWO) algorithm, Particle Swarm Optimization (PSO), and the Secretary Bird Optimization Algorithm (SBOA). The experimental data included 270 samples with vertical load variables (2, 3, and 4 kN), movement speed (1, 2, and 3 km/h), two traction devices (pneumatic tire and tracked wheel), and the number of passes (15 levels), which were collected under indoor conditions using a soil bin equipped with a single-wheel tester. The model hyperparameters were adjusted using the GWO and SBOA algorithms to increase the prediction accuracy and reduce the model error. The results showed that the SBOA-CatBoost hybrid model, with a Root Mean Square Error of 0.35 mm and a coefficient of determination of 0.97707, performed better than the other models. Furthermore, the SBOA-CatBoost hybrid model outperformed the other models with a Mean Absolute Percentage Error of 1.2%.
Similar content being viewed by others

Introduction
The passage of off-road vehicles over soft terrain induces soil compaction, increased apparent density, and reduced soil porosity, posing significant environmental and agricultural challenges1,2,3. When off-road vehicles pass outside specified pathways, the interaction between traction devices and soil creates deep ruts that profoundly impact machine performance. Among the effects of these ruts on off-road vehicle performance are reduced travel speeds and increased fuel consumption, resulting in greater wasted energy. Deep ruts can substantially limit the mobility of off-road vehicles. Mobility, according to4, refers to a vehicle’s capability to traverse specific terrains and routes.
Off-road vehicles compress soil surfaces during passage, causing irreversible deformation and sinkage. This occurs due to the vehicle’s weight and soil displacement5. The effects of soil subsidence in the surface layer are also transmitted to the lower layers of the soil and cause soil compression in the lower layers4,6.
Furthermore, the vehicle’s movement speed due to the change in the time of applying the vehicle’s weight to the soil may cause a change in the rut depth created by the wheel. The relationship between movement speed and rut depth is complex, influenced by factors such as soil type, moisture content, and wheel type. Investigating the speed of rut formation due to changes in driving speed can provide valuable insights for the design of off-road vehicles and the development of strategies to reduce soil erosion and compaction.
In a research study conducted by Sadeghi et al.7, the impact of soil moisture, movement speed, and multiple passes of a wood harvester on forest soil density and rut depth along movement paths in forest soil of Iran was investigated experimentally. One of the challenges associated with this method includes fluctuations in soil parameters and soil moisture due to environmental changes during the testing process. In addition, the non-uniformity of the soil texture in different places can significantly affect the results of the tests. Moreover, it is important to acknowledge that findings obtained through experimental methods may lack generalizability8,9.
Vennik et al.10 conducted a study to investigate the formation of rut depths and changes in the apparent density of soil due to the multiple passage of military vehicles in different types of soil. The rut depth and apparent density were measured at different depths after multiple vehicle passes. The findings showed that the lowest depth of ruts was observed in fields, while the deepest depths were recorded after one pass in wetland soil and after ten passes in pastures. One of the significant challenges of this method is the control of the investigated parameters.
An experimental model was presented in a study investigating the factors affecting the rut formed by the passage of an 8-wheel forwarder in Finnish forest areas with fine-grained soil texture. The results showed that the model can predict rut depth changes11. In another study, five classic models were used to estimate rut depth caused by vehicles to determine the most suitable models based on the Cone Index and Remolding Index (empirical models). The study showed that the Willoughby model performed best for depths of 15 to 30 cm with an R2of 0.92, while the performance of this model for other layers was lower than this value12.
Studies on machine learning-based methods have attracted the attention of researchers in recent years due to their high predictive ability in soil-machine studies. In another study, an ANN model was developed to predict rut depth in flexible pavements. The results showed that neural network-based rut depth prediction has significant advantages over linear regression methods and provides greater accuracy13. Studies used machine learning models such as Random Forest, GA-ANN, ETR, PSO, ANN, GWO-ANN, and decision tree-based models to predict soil shear strength as one of the basic soil parameters14,15,16,17. The results showed that the models can predict soil shear strength more accurately than traditional methods. These studies highlight the importance of replacing machine learning methods with conventional methods. A study on the road rutting depth index was conducted using hybrid machine learning methods with PSO optimization algorithms, such as CatBoost, XGBoost, LightGBM, and Random Forest. The results showed that the CatBoost model is more accurate and efficient than other models18. The CatBoost model’s more suitable performance can be attributed to its support for batch data with a large number of batch features. This model requires less preprocessing and shows high resistance to overfitting. It also performs very well on datasets with a limited number of observations19,20.
To investigate the interaction between wheels and soil, researchers employ various methodologies, including analytical, experimental, semi-empirical, and numerical approaches, as well as machine learning and neural network methods5. Analytical methods offer the advantage of quick and straightforward application, making them particularly suitable for preliminary studies and rapid evaluations21,22. However, results obtained from analytical methods often differ from real-world results due to numerous simplifications inherent in this approach23,24. Experimental and semi-experimental methods represent some of the most reliable approaches in the study of tire-soil interactions25. These methods primarily address the validation and refinement of results obtained from other techniques, thereby confirming their reliability. However, they also face challenges related to time and cost limitations, reproducibility of results, generalizability of findings, and accuracy of measurements9,26.
Technological advancements, particularly in computational capabilities, have facilitated the emergence of novel methodologies such as numerical approaches and machine learning27. These methodologies offer promising avenues for accurately predicting the intricate interactions between wheels and soil. However, one notable drawback associated with numerical methods is the significant computational costs28,29. In addition, numerical methods are often sensitive to initial conditions and input parameters, further weakening their robustness30. In contrast, machine learning techniques show less sensitivity to the mentioned limitations. Machine learning methods can provide effective solutions for predicting wheel-soil interactions with improved accuracy and performance, especially in the field of autonomous off-road vehicles. The environmental awareness of autonomous vehicles, especially their ability to perceive and interpret the characteristics of the operating environment in which they move, has a significant impact on their navigation capabilities, mobility performance, stability, and overall control dynamics31.
While most research on predicting rut depths with machine learning methods focuses on on-road conditions, The CatBoost model’s more suitable performance can be attributed to its support for batch data with many batch features. This model requires less preprocessing and shows high resistance to overfitting. It also performs very well on datasets with a limited number of observations. The use of machine learning methods is essential due to their ability to recognize patterns and predict complex relationships of wheel-soil interaction, especially in unconventional terrain. The main objective of this study is to predict the effect of agricultural pneumatic tire and tracked wheel under vertical load, multiple passes, and variable travel speed on rut formation in controlled soil conditions using the CatBoost algorithm. Although recent studies have addressed the application of machine learning to wheel-soil interaction, limited research has been devoted to wheel-induced rut formation with this approach. In this study, the CatBoost algorithm was used as an advanced decision tree and boosting method that improves prediction accuracy by modeling nonlinear relationships, noise resistance, and analyzing complex interactions of variables. Optimization of the meta-parameters of this algorithm with three meta-heuristic methods GWO, PSO, and SBOA, in addition to avoiding local optima, increased the generalizability and accuracy of the model in real conditions. This innovative approach shows higher flexibility and efficiency compared to traditional methods and fills the methodological gap in predicting soil settlement caused by multiple passes, considering wheel and track traction factors.
Materials and methods
A soil bin was used to control the experimental parameters during the tests. Experiments were conducted to evaluate and predict the effect of parameters, multiple passes, vertical load, and forward speed, on the rut depth created by the vehicle wheel. The soil storage used in this research is a fixed-type soil bin. The soil bin consists of chassis, carrier, control systems, and an electric motor to move the carrier. The length of this channel is 24 m, the width is 2 m and the depth of the soil layer is 0.9 m. The size of the soil bin makes it possible to perform tests in uniform soil conditions and decrease the differences in the mechanical properties of the soil during the tests due to the re-preparation of the soil. This action ensures the stability and accuracy of the obtained data.
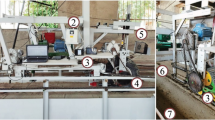
The single-wheel tester is mounted on a carrier, and it is possible to install a rubber wheel and track wheel on the wheel tester. The soil bin facility and its attachments is shown in Fig. 1.

Soil bin Carrier and Traction Devices. 1-Chassis, 2-Inverter, 3-Data acquisition system, 4-Traction Devices, 5-Static Vertical Load, 6-Rut Depth, 7-Soil Container.
The soil used in the soil bin was collected from agricultural soils and transferred to the soil channel. After transferring it to the soil bin, the soil was properly prepared for the experiments. The purpose of soil preparation was to create relatively uniform and homogeneous conditions in the test environment. Soil preparation included a leveling and troweling process to ensure a uniform texture throughout the soil channel. Table 1 provides an overview of the physical and mechanical properties of the soil after preparation.
Independent parameters of the test include 15 levels of passage, three levels of vertical load (2, 3, and 4 kN), and three levels of forward speed (1, 2, and 3 km/h). The selection of 15 pass levels is intended to ensure the achievement of maximum soil compaction under different loading conditions. The traction devices employed in this study consist of a rubber tractor wheel bearing the specifications Barez 8.25–16 PR HL, manufactured in Iran, and a customized track wheel measuring 60 cm. It should be noted that both wheels had a width of 22 cm. Table 2 illustrates the statistical characteristics of the independent parameters descriptively.
ELCO laser distance sensor model OSM40-KL800CBLI6Q1201, made in Germany, was used to measure the wheel rut depth. To measure the rut depth with a laser distance meter, a fixed reference point on the soil bin chassis is required to measure the distance of the rut depth relative to that point. For this purpose, a portable T-beam placed on the soil bin chassis was used to collect the rut depth data. In this way, measurements were made from two points in the soil channel, one on the undisturbed surface and the second on the wheel track (Fig. 2A). The difference between the measurements at the mentioned points indicates the wheel rut depth. Also, for the accuracy and precision of the measurements, a Clock Caliper with an accuracy of 0.02 mm was used to measure the rut depth directly parallel to the measurements with the laser sensor (Fig. 2C). This measurement was made by placing a steel strap on the created rut depth. Figure 2B shows how this measurement was made. Also, to increase the reliability and accuracy of the data, measurements were made in triplicate and at three different points in the soil channel. The recorded data for rut depth was transferred to Python 3.10.0 software for analysis.

Data acquisition of rut depth created with laser distance meter and caliper.
Sensitivity analysis
Sensitivity analysis is a tool for evaluating the relative importance of input characteristics in influencing output. Especially in complex problems where multiple features play a role in predicting the output, sensitivity analysis is typically performed to understand each feature’s impact on the model’s performance. In this research, SAHP method was used to analyze the sensitivity and calculate and analyze the importance of each feature (type of wheel, vertical load, forward speed, and number of passes) in the output parameter (rut depth). In this method, the contribution of each feature in the final prediction is calculated based on the concepts of Shapley values from game theory.
Shapley values generally calculate the contribution of each feature to a prediction. In this context, the contribution of independent parameters in creating soil rut depth is calculated based on experimental data according to Eq. (1).
where Фi is the contribution of feature i to the output, S is a set of features that does not include feature i, υ(S) is the output prediction using the features of set S, ∣S∣ is the number of features in set S, and ∣N∣ is the total number of features.
This relationship indicates that the contribution of each feature in predicting the output is calculated by calculating its effects in all possible combinations of features.
Machine learning method representation
The CatBoost algorithm was used in this study to estimate rut depth due to its high ability to detect and model complex nonlinear relationships, the need for less data for training than neural networks, the ability to handle noisy data common in engineering experiments, the ability to detect the relative importance of variables (Feature Importance), and batch feature processing. Since the changes in rut depth caused by the passage of a vehicle over the soil are nonlinear and complex under the influence of traction factors, vertical load, speed of movement, and the number of passes, it was used due to the challenging nature of data collection and the relatively small number of data (270 data). In the present study, the limited number of samples due to the challenging nature of data extraction was a limiting factor for implementing machine prediction models. Previous research has proven the appropriate performance of boosting machine learning models on limited data32,33. Therefore, the CatBoost model was used to overcome this limitation.
This algorithm is based on gradient boosting. The final CatBoost model is defined as a collection of weak decision trees, which is represented by Eq. (2).
where, ηi is the learning rate and hi(x) are the decision trees.
In the CatBoost algorithm, the Target Statistics method is used for average coding, calculated by Eq. (3). This part of the algorithm is implemented to convert the category feature, which in this study is the traction devices type (tire and track), and encodes the category feature numerically.
where, countInClass is the number of samples in each class, prior is the smoothing parameter, and µ₀ is the overall target mean. This approach significantly avoids the data leakage problem.
To prevent overfitting, the CatBoost regularization system consists of L2 regularization and tree depth regularization, which are defined by Eqs. (4) and (5), respectively.
where, w is the model weight vector, wi is the weight corresponding to the i-th feature in the decision tree leaves, n is the total number of weights in the model, β is the depth penalty coefficient, D is the depth of the current tree, and DP is the penalty of depth.
The error gradient is used to update the model in reinforcement learning algorithms. CatBoost uses an unbiased gradient (\(\tilde{g}_{i}\)) calculation method, which is represented by the relationship in Eq. (6).
where, L is the cost function, and F(xi) is the predicted value of the model for sample i.
The performance and learning of the CatBoost algorithm depend on properly tuning its hyperparameters. The hyperparameters tuned in this study for the CatBoost algorithm include iterations, which determine the number of decision trees. The depth parameter specifies the maximum depth of the trees. The LR parameter controls the learning rate. The l2_leaf_reg parameter adjusts the L2 regularization coefficient and helps prevent overfitting. bagging_temperature controls the amount of randomization in the sampling. min_data_in_leaf determines the minimum number of samples required in each tree leaf. The subsample parameter specifies the proportion of samples used in each iteration. Finally, the RSM (Random Subspace Method) with the proposed value controls the proportion of features used in each split.
Hyperparameters adjust methods
It is necessary to adjust its hyperparameters to achieve the optimal performance of the CatBoost machine learning approach. Hyperparameters’ importance comes from their influence on CatBoost method performance, convergence, and generalization capabilities. Manual adjustment of hyperparameters in machine learning models may be time-consuming. However, limited space is explored in the manual hyperparameters tuning method, and simultaneous multidimensional optimization is challenging. In this study, three nature-inspired optimization algorithms, the GWO, PSO, and the SBOA, were used to automatically tune the CatBoost model’s hyperparameters. GWO, PSO, and SBOA are suitable for simultaneously optimizing multiple hyperparameters due to their powerful exploration capabilities and faster convergence in high-dimensional spaces. They were selected due to their ability to search locally and reduce the probability of getting stuck in local optima.Previous studies have demonstrated the effectiveness of metaheuristic optimization algorithms in soil interaction applications5,34.

Flowchart of the WGO-CatBoost hybrid model.
The GWO algorithm is inspired by the social behavior and hunting strategies of gray wolves in nature. The hierarchical structure and cooperative hunting behavior of wolves are used in this algorithm to explore and exploit the search space efficiently. Figure 3 shows the flowchart of the GWO-Catboost hybrid model.The SBOA, inspired by the hunting and survival strategies of secretary birds, is used in this study to tune the hyperparameters of the CatBoost algorithm automatically. The PSO algorithm is another metaheuristic optimization algorithm used in this study, which is inspired by the social behavior of animals such as fish and birds that live in groups. In PSO, a population of candidate solutions, called particles, moves through the search space by following the best known positions of themselves and their neighbors. Each particle adjusts its position for exploration based on its own experience and the experience of the swarm. PSO is widely used to solve optimization problems due to its simplicity, robustness, and ability to converge to optimal or near-optimal solutions rapidly. SBOA incorporates the bird’s ability to locate and target prey effectively into its algorithm structure, which makes it effective for multidimensional optimization problems. Figure 4 presents the flowchart of the hybrid SBOA-Catboost model. These algorithms are meta-heuristic optimization tools to tune hyperparameters, optimize model performance, improve convergence, and reduce computational costs.

Flowchart of the SBOA-CatBoost hybrid model.
Performance evaluation of CatBoost
In this research, the RMSE, R2, RAE, MAD, and MAPE were used as metrics to evaluate CatBoost’s performance.
RMSE is a metric used in regression analysis to quantify the mean difference between predicted and actual values. It measures the standard deviation of the prediction errors. Lower RMSE values indicate better model performance, and is calculated using Eq. (7).
The R2 measures the degree of linear relationship between two variables. R2 measures the proportion of the variation in the dependent variable that can be attributed to the independent variable. Higher values indicate better model fit, and is calculated using Eq. (8).
Relative error is the ratio of predicted values to the actual value. It is calculated by dividing the absolute error by the actual value and expressing it as a percentage. Lower RAE values indicate better predictive ability of the model, and is calculated using Eq. (9).
MAD is a statistical measure to measure the accuracy and variability of a model’s prediction and is calculated from Eq. (10).
MAPE is the average percentage error of the predictions relative to the actual values. Lower MAPE values indicate more accurate models, and is defined using Eq. (11).
Result and discussions
This section presents the results of a study investigating the effects of vehicle movement speed, vertical load, and multiple passes on the rut depth created by vehicle passes with two traction devices, a pneumatic agricultural tire, and a tracked wheel. The CatBoost machine learning method was developed and trained using experimental data to predict rut depths based on input parameters. Four CatBoost models, including one with base CatBoost settings and three hybrid models with three meta-heuristic optimization algorithms, GWO, PSO, and SBOA, were used for rut depth prediction, and the results were compared.
Sensitivity analysis
Sensitivity analysis is performed to determine the changes in the output by changing the input features and identifies the contribution of the experimental data features that affect the soil rut depth. As shown in Fig. 5, wheel type, with a SHAP value of 32.9911, has the greatest impact on predicting the rut depth. In contrast, the vertical load, number of passes, and travel speed features are next in line with SHAP values of 9.0137, 5.9357, and 3.3470, respectively. These analyses were performed using SHAP due to the direct influence of parameters based on the importance on machine learning prediction models. Higher ranks are the features to which the machine learning model reacts most sensitively and significantly impacts the model’s overall performance.

Sensitivity analysis of the characteristics on the depth of the rut created by the wheel, using the SHAP method.
Impact of independent variables on rut depth variations
This section analyses how different factors influence cumulative rut depth, including the number of passes, vertical load, traction device type, and velocity. Using heat map visualizations and comparing various experimental conditions, the findings highlight the dominant role of vertical load and the number of passes in rut depth formation while also illustrating the minimal impact of velocity in later passes. These insights comprehensively explain the dynamic processes leading to soil deformation under varying operational conditions. The heat map graph in Fig. 6 shows the cumulative changes in rut depth with the independent variables of the number of passes, vertical load, and traction device type (pneumatic wheel and track wheel) at constant speed of 1 km/h.

Effect of vertical load on cumulative rut depth in different number of passes for pneumatic and track wheels at a velocity of 1 km/h.
According to Fig. 6, it can be concluded that with an increasing number of passes, rut depth also increases. This trend is observed in both types of traction devices and in all vertical loads. The greatest increase in rut depth occurs in the initial passes (especially up to the fifth pass). After that, the rate of increase in rut depth decreases until the soil reaches its maximum deformation (maximum compaction) under the corresponding vertical load. However, the final rut depth value depends on the vertical load and the type of traction device. It is also observed that with increasing vertical load, rut depth also increases. This trend is observed in both types of traction devices and in all numbers of passes. In comparing the two types of traction devices, it is observed that the pneumatic wheel creates a greater rut depth than the track wheel. The reason for this difference could be the more uniform pressure distribution on the soil surface due to the almost rectangular contact surface of the track wheel, which results in the creation of ruts with a shallower depth than the pneumatic wheel. These findings align with previous research conducted by Liu et al.35, Wang et al.36, Taghavifar and Mardani37, Coutermarsh38 who reported similar relationships between rut depth and vehicle parameters.
Figure 7 illustrates the effect of the number of passes, velocity, and type of traction devices at a constant vertical load of 1 kN on the cumulative changes in rut depth.

Effect of velocity on cumulative rut depth in different number of passes for pneumatic and track wheels at a vertical load of 1 kN.
According to Fig. 7, it seems that increasing the speed has little effect on the rut depth. It is also observed that the velocity significantly affects the rut depth in the initial passes. However, in higher passes (especially from the tenth pass onwards), the rut depth reaches almost a constant value for all three velocities. In the initial passes, the rut depth decreases with increasing the velocity. This observation can be due to the reduction in the duration of loading on the soil due to the increase in the forward speed.
On the other hand, it is observed that with increasing the forward speed, more passes are required for the soil to reach a constant trend of compaction. Observations show that reducing the speed at a constant load causes more soil compaction in the initial passes (especially the first three passes). By observing the maximum soil deformation (the fifteenth pass) at different speeds, it can be concluded that the forward speed has little effect on the ultimate soil deformation. This effect can be attributed to the compaction and stability of the soil as the number of passes increases. During the initial passes, the soil is softer and more susceptible to deformation, making the speed of movement an important factor in the depth of the furrows. However, after several passes, the soil becomes compacted to a degree where changes in speed have a diminishing effect on the rut depth. Therefore, in the pneumatic wheel, the number of passes and the vertical load are more deciding factors in the final rut depth. These findings align with previous research investigating soil-wheel interactions39,40,41.
Hyperparameters adjusted with the GWO, PSO, and SBOA algorithm
To determine the optimal hyperparameters of the CatBoost model, two optimization algorithms, SBOA, PSO, and GWO, were used. These algorithms were used to optimize the hyperparameters that affect the performance of the model. Table 2 shows the values of the optimized hyperparameters for the CatBoost model by each of these two algorithms.
After determining the hyperparameters, the CatBoost model was trained using the optimized parameter values. In this step, the training and validation datasets were used to evaluate the model. The goal of this process was to extract the results from the prediction and evaluate the accuracy of the model in identifying patterns and predicting rut depth during the training process. For this purpose, various metrics such as RMSE, R2, RAE, and MAPE were used, which determine the power of the model in identifying complex patterns and providing accurate predictions.
Evaluation of regression plots and model performance
Figure 8 shows the regression plots of the different CatBoost models used in this research in the training phase. Of the total data used (270 data) in the testing phase, 204 were considered for training data and 51 for validation data. Additionally, 15 data were selectively separated (one level of experiments) from the entire training set as unseen data before the start of the training phase and used as test data after training the model to determine its generalizability and accuracy. The results show that the performance of all three models on the training and validation data is acceptable. Figure 8A (Base CatBoost model) shows that the model performed well with an R2 of 0.9999. The model has learned the relationship between the input and output variables well. In the graph in Fig. 8B (hybrid model with GWO), the R2 of 0.9998 shows that this hybrid model was able to learn the trend of changes with almost the same accuracy as the non-hybrid model. Figure 8C (Hybrid model with SBOA) with an R2 of 0.9997 shows that the SBOA algorithm, like the previous two models, was able to provide good performance. On the other hand, the PSO algorithm also performed well on the training data with an R2 of 0.9999, as shown in Fig. 8D.

Comparison of regression of training data of CatBoost model on three basic and hybrid models.
Figure 9 shows the regression plots for the validation data for all three models. In Fig. 9A, in the validation phase, the R2 of 0.9961 shows that the base model could generalize well to the validation data. Figure 9B, with a R2 of 0.9991, shows that hybridization with GWO has improved the model’s generalizability compared to the base model. Figure 9C shows that the SBOA algorithm has achieved better generalizability than the previous two other models in the validation phase with a R2 of 0.9993. However, Fig. 9D shows the PSO algorithm’s poor performance compared to other validation data models. It seems that the PSO algorithm could not adapt well to the target data and detect the trend well, although it achieved an R2 of 0.9349. The results show that hybrid models have better generalization capabilities than the basic model.

Comparison of regression of validation data of CatBoost model on three basic and hybrid models.
Using unseen data for the final evaluation of the model allows for the measurement of the generalizability and actual performance of the model. Unseen data also reveals the presence or absence of overfitting of the models. In addition, using unseen data allows for comparison with other models and identification of the strengths and weaknesses of the model.

Comparison of regression of unseen data of CatBoost model on three basic and hybrid models (GWO and SBOA).
Figure 10A shows the regression of unseen data for the base CatBoost model, which shows acceptable performance with a R2 of 0.96265. The graph in Fig. 10B shows that hybridizing the CatBoost model with the GWO algorithm has improved the model performance with a R2 of 0.97000. The distribution of points around the fitting line has also become more uniform. The hybrid model with SBOA shows the best performance among the three models. The R2 is 0.97707, the highest value, indicating high prediction accuracy compared to previous models. The standard error of the parameters also has the lowest value, indicating the high stability of the model (Fig. 10C). Also, the hybrid PSO model, whose graph is shown in Fig. 10D, shows its poor performance on unseen data and the weakest performance among all the models, with an R2 of 0.5422. This indicates that the model has performed poorly in learning and has overfitted a large part of the training data.
Statistical evaluation of model performance
ANOVA is a statistical method used to evaluate the effect of one or more independent variables on a dependent variable. In the present study, the type of traction device, vertical load, speed, and number of passes are used as independent variables, and the rut created by the vehicle is used as the dependent variable. Table 3 shows the ANOVA analysis of the data for this study.
The ANOVA analysis in Table 3 shows that all independent factors, including wheel type, vertical load, movement velocity, and number of passes, significantly affect rutting depth at the 1% level. Furthermore, the interaction effects of all parameters except the interaction effect of the number of passes and forward speed were significant at the 1% level.
Statistical metrics for evaluating model performance are essential and key tools in machine learning research because they allow for quantitative and scientific comparisons of different models’ performance. Statistical metrics evaluate the efficiency and accuracy of models and provide a scientific basis for making decisions about choosing the best model and proving the superiority of one method over another.
Figure 11 shows the results of the statistical metrics obtained for three CatBoost models, including two hybrid models, GWO-CatBoost and SBOA-CatBoost, PSO-CatBoost, and a base CatBoost model in the training phase. This comparison includes evaluating the model performance for the training and validation datasets.
Analysis of the results shows that both optimization algorithms were able to optimize the CatBoost model sufficiently accurately to predict rut depth. However, slight differences in model performance can be observed using these algorithms.

Comparison of model evaluation metrics for training (A) and validation (B) data unseen (C) data.
Figure 11A is a statistical analysis of the performance of the CatBoost models on the training data. As can be seen from the figure, the base model achieved a lower RMSE on the training data. According to the RMSE values of hybrid models, the SBOA model has shown better performance than other models. The MAPE indicates better base model performance than hybrid models. The results for the two statistical performance measures, RAE and MAD, are also consistent with other measures, such that the base model’s performance on training data is better than that of the hybrid models. However, looking closely at Fig. 11B, it appears that the model is slightly overfitted on the data, as the base model’s performance on the validation data decreases.
The SBOA hybrid model’s performance on validation data is better than that of the other three models, indicating that it is learning the data trends properly. Although the GWO hybrid model has a slightly weaker performance than the SBOA model, the performance of this model is still acceptable. It seems that hybrid models have increased the model’s generalizability and provided more reliable results. However, the models’ output must be run on unseen data to determine their actual performance. The models’ performance metrics on unseen data are shown in the graph in Fig. 11C.
By analyzing the RMSE values in Fig. 9C, it can be concluded that the CatBoost base model has a higher RMSE in the unseen data, indicating poor generalizability. This result is consistent with previous analysis that showed slight overfitting of the base model on the training data. This result is consistent with the previous analysis, which indicated slight overfitting of the base model on the training data. The RMSE values show that the hybrid SBOA model performs best on unseen data, indicating that this algorithm’s parameter optimization has reduced the error. Analysis of MAPE values shows that the SBOA hybrid model has the lowest relative error, which is more suitable for more accurate prediction in new data. The non-hybrid and hybrid GWO models showed higher relative errors, although the hybrid GWO performed better than the base model. On the other hand, the PSO hybrid model has much lower error than the other models at high traffic. However, its performance on the initial passes (the most essential passing levels) is abysmal and exhibits significant error. All three models perform relatively well in the RAE measure. However, the SBOA model performed better than the other models and reduced the relative errors. The MAD shows that the SBOA hybrid model performs better in reducing absolute deviations than the baseline model. The SBOA model also outperformed GWO in this metric.
The results show that the hybrid models SBOA-CatBoost and GWO-CatBoost, especially the SBOA-CatBoost model, effectively improve the accuracy of rut depth prediction. They can also significantly reduce the model’s overfitting. On the other hand, their effective performance on unseen data shows that hybrid models are more generalizable and can perform better in real-world conditions. This is important for practical applications in off-road vehicles, improving their performance and preventing excessive soil compaction in agriculture. Accurate prediction of rut depth, especially in real-time, can lead to vehicle response, help manage resources, and preserve the soil environment.
Figure 12 illustrates the error plot for the base model, the hybrid model with GWO, and the model optimized with SBOA. The dashed line is also shown as the zero error reference.

Comparison of the prediction error of three various models.
The base model, when compared to the optimized models, exhibits the highest error values. The model error increases rapidly at the initial points and remains at a high oscillation level. This indicates that the base model is not accurate enough in predicting the data and is a poor fit for the actual data patterns. The GWO-optimized model performs better than the base model. The error of this model shows fewer fluctuations. However, at some points, it is close to the base model. The SBOA hybrid model shows the lowest error at all data points. In addition to reducing the error, this model has more stable behavior and fewer fluctuations than the other two models. The gap between the error of this model and the other two models underscores the importance of reducing error in prediction models. High errors can lead to incorrect or inefficient decisions, making error reduction a critical factor in model optimization.
The PSO hybrid model has a significant error in predicting the initial passes, which are the most important pass levels and where the most soil deformation occurs. However, as the number of passes increases, the model error decreases sharply, so that from the fourth pass onwards, its error becomes very close to the ideal value. This indicates that the model has high accuracy in predicting the rot depth in these passes.
The graph in Fig. 13 illustrates the performance of different models for predicting rut depth using a Taylor plot. The point of the graph indicates the position of the predicted models (SBOA-CatBoost, GWO-CatBoost, PSO-CatBoost, and the base model) compared to the experimental data.

Comparing the statistical fit of prediction models to experimental data using Taylor diagrams.
The red line, defined as the Experimental Reference, represents the standard deviation of the actual data. Models that are closer to this point have a prediction that is closer to the actual data. The combined SBOA-CatBoost model has delivered the best performance with a high correlation coefficient (close to 0.99) and a standard deviation close to the experimental reference. The small distance of this model from the reference point indicates less error and higher prediction accuracy. The GWO-CatBoost model also has an acceptable performance but performs worse than the SBOA-CatBoost model. The base model with a lower correlation coefficient (around 0.95) shows a poorer performance than the two optimized models. The weakest performance is for the PSO-CatBoost hybrid model, which is the most distant from the empirical data reference, indicating that it failed to learn the trends well. One possibility is that the PSO algorithm is stuck in a local minima with a low learning rate and is unable to find proper convergence.
Off-road vehicles with soft surfaces significantly impact the energy consumed, rolling resistance, and soil compaction. As the results of this study conducted, a large percentage of soil deformation occurs in the initial passes due to vehicle traffic, so the prediction accuracy in the first passes (up to the fifth pass) is more important than in other passes. Although it is important to predict the overall soil deformation trend, the prediction accuracy in the initial passes is more important. For this purpose, and to examine the accuracy of the models in different passes and compare them with experimental data, the trend of rut depth deformation with experimental data and model output data is presented in Fig. 14.

Comparison of experimental and predicted rut depths on unseen data.
According to the graphs in Fig. 12, it can be seen that all four graphs (actual data and predictions of the three models) follow a similar general trend. With an increasing number of passes, the rut depth increases rapidly due to the soft texture of the soil and its high ability to deform. An increasing trend in the rut depth is observed until approximately the fifth pass, which indicates that the soil has a high compaction capability in these passes. However, each pass causes further compaction of the soil. The increase in soil compaction with the number of passes causes a decrease in the rate of increase in rut depth. After the fifth pass, the slope of the graphs decreases, and the trend of the increase in the rut depth becomes slower, indicating that the soil has almost reached a stabilized state proportional to the Vertical load applied to the wheel.
By comparing the accuracy of the models in predicting rut depth in the initial traffic, it can be concluded that the base model performs worse in the initial traffic than the GWO and SBOA hybrid models. On the other hand, by comparing the hybrid models, it can be concluded that the SBOA-CatBoost hybrid model performs better than the WGO-CatBoost hybrid model in all passes and is closer to the experimental data. These results show that GWO and SBOA optimization algorithms have significantly improved prediction accuracy. The results of this section are consistent with the results of the previous sections and indicate the importance and necessity of optimizing machine learning models with meta-heuristic algorithms.
Unlike other models, PSO-CatBoost predicted the initial passes with a significant difference. Meanwhile, with the number of passes increasing, the change detection rate increased significantly and was able to predict the experimental data trend with reasonable accuracy. However, this model is not reliable due to the low accuracy in initial predictions and cannot be used in real scenarios.
Table 4 illustrates the performance of root depth prediction models in various studies, including linear models, neural networks, and machine learning algorithms, and their comparison with the present study.
Off-road environments present much more complex and dynamic conditions than on-road environments due to terrain irregularities, variations in soil texture, moisture, and other environmental factors. This study used a fully controlled laboratory environment where soil properties, including moisture, texture, and density, were precisely controlled. Data collection in this study was performed using advanced equipment such as laser sensors. These tools significantly increased the accuracy of measurements and reduced measurement errors. The high accuracy of data collection reduced noise and prevented excessive complexity in the data. This ultimately led to improved performance of predictive models trained on this data. These factors can be considered as the main reasons for the better performance of the models in this study compared to other research that focused on on-road data.
Limitations and future works
This study has limitations that should be considered. First, the experiments were conducted under controlled laboratory conditions using a soil bin, which may not fully reflect the actual conditions of external environments and limit the generalizability of the results. Second, the number of samples used (270 samples) is relatively small, and increasing the number of samples could improve the accuracy and reliability of the predictive models. Third, only one soil type with specific physical and mechanical properties was investigated. In contrast, different soils with different compositions and moisture contents may exhibit different behavior under applied loads, which limits the generalizability of the results to other soils. Given these limitations, more realistic conditions, various soil types, and the effects of soil moisture should be investigated in future studies to increase the generalizability of the models.
Conclusion
Aiming to predict the depth of ruts created by off-road vehicles on soft soil, this research showed that the combination of machine learning and optimization algorithms can be used to increase the accuracy of the analysis and prediction of soil changes under pressure. Although the CatBoost algorithm has good resistance to overfitting, its combination with the GWO and SBOA methods indicated that higher prediction accuracy and better generalization ability can be achieved compared to the base model by optimally adjusting the hyperparameters. Among the models studied, the hybrid SBOA-CatBoost model performed better, achieving an RMSE of 0.35 mm and R2 of 0.97707 on unseen data, and was able to provide more accurate predictions and reduce overfitting, making it a suitable approach for real applications. The trend of furrow depth changes showed that the highest soil density occurs in the initial passes, and then the furrow depth increases at a slower rate until the soil reaches its maximum deformation capacity, after which the slope of the deformation graph approaches a straight line. The results also showed that optimizing algorithms significantly reduced the model error, especially on unseen data, with the SBOA-CatBoost model achieving an RMSE of 0.28 mm and R2 of 0.985 in the initial passes, and improved the model’s performance in new conditions. In future research, different soil conditions can be examined in terms of moisture content and texture type to introduce more input parameters into the models and increase their predictive capabilities in real-world conditions. Implementing these models in real-world environments is of particular importance in evaluating performance under variable conditions. Developing models that can predict and optimize in real-time could be valuable for intelligent off-road vehicles. Overall, this research could be useful in utilizing artificial intelligence for sustainable soil management, improving vehicle performance in off-road environments, and paving the way for more advanced research into wheel-soil interactions.
Data availability
The data that support the findings of this study are available upon reasonable request for academic and scientific research purposes. Interested researchers may contact the corresponding author to obtain access, subject to institutional and ethical considerations.
Abbreviations
- RMSE:
-
Root mean square error
- R2 :
-
Coefficient of determination
- GWO:
-
Gray Wolf optimization
- SBOA:
-
Secretary bird optimization algorithm
- PSO:
-
Particle Swarm Optimization
- ANN:
-
Artificial Neural Network
- GA-ANN:
-
Genetic Algorithm-Artificial Neural Network
- ETR:
-
Extra Trees Regressor
- PSO:
-
Particle Swarm Optimization
- XGBoost:
-
Extreme Gradient Boosting
- LightGBM:
-
Light Gradient Boosting Machine
- SHAP:
-
Shapley Additive Explanations
- RAE:
-
Relative analytical error
- MAD:
-
Mean absolute deviation
- MAPE:
-
Mean absolute percentage error
- ANOVA:
-
Analysis of variance
- DF:
-
Degrees of freedom
- Adj SS:
-
Adjusted sum of squares
- Adj MS:
-
Adjusted mean squares
- F-Value:
-
F-statistic value
- P Value:
-
Probability value
References
Shaheb, M. R., Venkatesh, R. & Shearer, S. A. A review on the effect of soil compaction and its management for sustainable crop production. J. Biosyst. Eng. 46, 417–439. https://doi.org/10.1007/s42853-021-00117-7 (2021).
Vennik, K., Keller, T., Kukk, P., Krebstein, K. & Reintam, E. Soil rut depth prediction based on soil strength measurements on typical Estonian soils. Biosyst. Eng. 163, 78–86 (2017).
Assaeed, A. M. et al. Impact of off-road vehicles on soil and vegetation in a desert rangeland in Saudi Arabia. Saudi J. Biol. Sci. 26, 1187–1193 (2019).
Affleck, R. T. Disturbance measurements from off-road vehicles on seasonal terrain (2005).
Golanbari, B., Mardani, A., Hosainpour, A. & Taghavifar, H. Modeling soil deformation for off-road vehicles using deep learning optimized by Grey Wolf algorithm. J. Agric. Mach. https://doi.org/10.22067/jam.2023.84339.1188 (2023).
Rauf, O., Ning, Y., Ming, C. & Haoxiang, M. Evaluation of ground pressure, bearing capacity, and sinkage in rigid-flexible tracked vehicles on characterized terrain in laboratory conditions. Sensors 24, 1779 (2024).
Sadeghi, S., Solgi, A. & Tsioras, P. A. Effects of traffic intensity and travel speed on forest soil disturbance at different soil moisture conditions. Int. J. Eng. 33, 146–154 (2022).
Taghizadeh, R. et al. Semi-supervised learning for the spatial extrapolation of soil information. Geoderma 426, 116094 (2022).
Golanbari, B. & Mardani, A. An analytical model for stress estimation at the soil-tire interface using the dynamic contact length. J. Terramech. 111, 1–7 (2024).
Vennik, K., Kukk, P., Krebstein, K., Reintam, E. & Keller, T. Measurements and simulations of rut depth due to single and multiple passes of a military vehicle on different soil types. Soil. Tillage Res. 186, 120–127 (2019).
Uusitalo, J., Ala-Ilomäki, J., Lindeman, H., Toivio, J. & Siren, M. Predicting rut depth induced by an 8-wheeled forwarder in fine-grained boreal forest soils. Ann. Sci. 77, 42 (2020).
Sirén, M. et al. Predicting forwarder rut formation on fine-grained mineral soils. Scand. J. Res. 34, 145–154 (2019).
Khalifah, R., Souliman, M. I. & M. Bajusair, M. B. Development of prediction model for rutting depth using artificial neural network. CivilEng 4, 174–184 (2023).
Olamide Taiwo, B. et al. Explosive utilization efficiency enhancement: An application of machine learning for powder factor prediction using critical rock characteristics. Heliyon 10, e33099 (2024).
Rabbani, A. et al. Utilization of tree-based ensemble models for predicting the shear strength of soil. Transp. Infrastruct. Geotechnol. 11, 2382–2405 (2024).
Rabbani, D., Samui, P. & Kumari, S. A novel hybrid model of augmented grey wolf optimizer and artificial neural network for predicting shear strength of soil. Model. Earth Syst. Environ. 9, 1–21 (2022).
Rabbani, A., Samui, P. & Kumari, S. Implementing ensemble learning models for the prediction of shear strength of soil. Asian J. Civ. Eng. 24, 2103–2119 (2023).
Xing, Z., Hao, J., Pei, L., Weng, Y. & Li, H. Prediction of road rutting depth based on PSO-CatBoost. In 2024 9th International Conference on Computer and Communication Systems (ICCCS) 201–206 (IEEE, 2024).
Kumar, G. S. & Dhanalakshmi, R. Performance analysis of CatBoost algorithm and XGBoost algorithm for prediction of CO2 emission rating. In 2023 6th International Conference on Contemporary Computing and Informatics (IC3I). vol. 6 1497–1501 (2023).
Shyam, R., Ayachit, S. S., Patil, V. & Singh, A. Competitive analysis of the top gradient boosting machine learning algorithms. In 2020 2nd International Conference on Advances in Computing, Communication Control and Networking (ICACCCN) 191–196 (2020). https://doi.org/10.1109/ICACCCN51052.2020.9362840.
Keller, T. A model for the prediction of the contact area and the distribution of vertical stress below agricultural tyres from readily available tyre parameters. Biosyst. Eng. 92, 85–96 (2005).
Golanbari, B. & Mardani, A. Analytical traction force model development for soil-tire interaction: Incorporating dynamic contact area and parameter analysis using Taguchi method. Biomech. Bioenergy Res. 2, 56–64 (2023).
Schjønning, P., Stettler, M., Keller, T., Lassen, P. & Lamandé, M. Predicted tyre–soil interface area and vertical stress distribution based on loading characteristics. Soil. Tillage Res. 152, 52–66 (2015).
Feda, J. Stress in Subsoil and Methods of Final Settlement Calculation (ed. Bazant, Z. P.) 18, (Elsevier, 1978).
Mardani, A. & Golanbari, B. Indoor measurement and analysis on soil-traction device interaction using a soil bin. Sci. Rep. 14, 10077 (2024).
Sitkei, G., Pillinger, G., Máthé, L., Gurmai, L. & Kiss, P. Methods for generalization of experimental results in terramechanics. J. Terramech. 81, 23–34 (2019).
Rabbani, A. et al. A comprehensive study on the application of soft computing methods in predicting and evaluating rock fragmentation in an opencast mining. Earth Sci. Inf. 17, 6019–6034 (2024).
Liu, C. H. & Wong, J. Y. Numerical simulations of tire-soil interaction based on critical state soil mechanics. J. Terramech. 33, 209–221 (1996).
El-Sayegh, Z., El-Gindy, M., Johansson, I. & Öijer, F. Improved tire-soil interaction model using FEA-SPH simulation. J. Terramech. 78, 53–62 (2018).
Homma, T. & Saltelli, A. Importance measures in global sensitivity analysis of nonlinear models. Reliab. Eng. Syst. Saf. 52, 1–17 (1996).
Taghavifar, H. & Mardani, A. Off-road vehicle dynamics. Stud. Syst. Decis. Control. 70, 37 (2017).
Branstad-Spates, E. H. et al. Gradient boosting machine learning model to predict aflatoxins in Iowa corn. Front. Microbiol. 14, 1248772 (2023).
Prenner, J. A. & Robbes, R. Making the most of small software engineering datasets with modern machine learning. IEEE Trans. Softw. Eng. 48, 5050–5067 (2022).
Xue, H., Lu, S. & Zhang, C. An adaptive control based on improved Gray Wolf algorithm for mobile robots. Appl. Sci. 14, 7092. https://doi.org/10.3390/app14167092 (2024).
Liu, K., Ayers, P., Howard, H., Anderson, A. & Kane, J. Multi-pass rutting study for turning wheeled and tracked vehicles. Trans. ASABE 54, 5–12 (2011).
Wang, Y. et al. A new non-contact method for calculating deformation resistance of tire tread rubber material under rolling condition. Optik 269, 169835 (2022).
Taghavifar, H. & Mardani, A. Effect of velocity, wheel load and multipass on soil compaction. J. Saudi Soc. Agric. Sci. 13, 57–66 (2014).
Coutermarsh, B. Velocity effect of vehicle rolling resistance in sand. J. Terramech. 44, 275–291 (2007).
Liu, J. & Kushwaha, R. L. Effect of travel speed and vertical load on the subsoil force and displacement under a smooth steel roller. J. Terramech. 49, 263–270 (2012).
Golanbari, B., Mardani, A., Hosainpour, A. & Taghavifar, H. Predicting terrain deformation patterns in off-road vehicle-soil interactions using TRR algorithm. J. Terramech. 117, 101021 (2025).
ten Damme, L. et al. The contribution of tyre evolution to the reduction of soil compaction risks. Soil. Tillage Res. 194, 104283 (2019).
Funding
This research did not receive any specific grant from funding agencies in the public, commercial, or not-for-profit sectors.
Author information
Authors and Affiliations
Contributions
B.G. conducted the data collection, wrote the first draft of the manuscript, and participated in the research ideation and analysis of the results. A.M. proposed the research idea, supervised all data collection activities, and guided the development of the manuscript as the primary supervisor. In addition, A.M. played a significant role in data analysis and manuscript revision. N.F. participated in data collection and manuscript editing. A.N.C. contributed to data collection and manuscript editing.
Corresponding author
Ethics declarations
Competing interests
The authors declare no competing interests.
Permission for land study
The authors declare that all land experiments and studies were carried out according to authorized rules.
Additional information
Publisher’s note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution-NonCommercial-NoDerivatives 4.0 International License, which permits any non-commercial use, sharing, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if you modified the licensed material. You do not have permission under this licence to share adapted material derived from this article or parts of it. The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by-nc-nd/4.0/.
About this article

Cite this article
Golanbari, B., Mardani, A., Farhadi, N. et al. Applications of machine learning in predicting rut depth in off-road environments. Sci Rep 15, 5486 (2025). https://doi.org/10.1038/s41598-025-90054-8
Received:
Accepted:
Published:
Version of record:
DOI: https://doi.org/10.1038/s41598-025-90054-8
