
Abstract
Millimeter-wave (mmWave) links are highly susceptible to rapid channel variations and are vulnerable to obstacles. As large-scale antenna arrays can cause high training overhead and frequent beam adjustment inevitably, the use of narrow beams tends to significantly increase system overhead and latency of millimeter-wave beam management. To address the above problems, we propose a novel beam management method for millimeter-wave mobile communications based on digital twin-enabled scenario cognition. Digital twin technology can enhance beam management by accounting for scenario characteristics, including environment information and dynamic channel information. This enables the mapping and synchronization between the physical world and digital world. Simulation results demonstrate that, thanks to scenario cognition, the resulting beam tracking scheme contributes to efficient adjustment, and the system overhead can be reduced. The appropriate system configuration can be obtained iteratively by a tradeoff between the system performance and system complexity (in terms of the product of overhead and delay).
Similar content being viewed by others


Introduction
Millimeter-wave communication has gained significant attention in the last few years, thanks to the high data rates enabled by its large available bandwidth1,2. However, millimeter-wave links are highly susceptible to rapid channel variations and are vulnerable to obstacles, suffering from severe free-space path loss and atmospheric absorption.
Although existing millimeter-wave multiple-input multiple-output (MIMO) systems can compensate for some propagation loss, they incur substantial hardware complexity and expensive hardware costs. Consequently, millimeter-wave communications rely heavily on beam management (e.g., beam training, alignment, and tracking) to select the appropriate beam during user equipment (UE) movement in a quick manner2. Moreover, due to the frequent beam adjustment (e.g., traditional exhaustive search-based)2,3,4,5, the overhead and delay (including initial access, beam adjustment, and processing) of millimeter-wave mobile communication systems increase significantly, greatly affecting the quality of experience (QoE). To ameliorate this, transceiver beams require precise alignment to reduce propagation loss6. Directional links consist of initial access and beam tracking, which are time-consuming. However, the precise alignment significantly aggravates delay in access procedures and makes the system performance more sensitive to environmental changes. To overcome these challenges, an effective beam management scheme should be proposed to improve beam alignment accuracy and reduce system overhead.
In general, fast initial access and beam tracking are ensured by allocating a large number of time-frequency resources to the user equipment in millimeter-wave mobile communication systems3. In4, existing beam training methods were divided into three categories, which included blind beam training, prior information-aided beam training, and machine learning-based beam training. Beam tracking methods consisted of bayesian statistics, side information-aided beam tracking, and machine learning2,4. Nevertheless, current beam management schemes often ignore the scenario cognition of wireless environment and dynamic channel, leading to a lack of robustness in beam tracking methods. Adaptive antenna arrays are essential for millimeter-wave communications, compensating for propagation attenuation caused by blockages from dynamic obstacles1. To reduce the overhead caused by beam training, an interactive learning paradigm was proposed in7, which leveraged wireless communication domain knowledge and the adaptive learning capabilities of machine learning. However, the beam pattern differences between uplink and downlink are not considered. Recently, the liquid neural network has attracted researchers’ attention due to its high flexibility and robustness. In8,9, the authors employed liquid neural networks to achieve robust beamforming and continuous-time beam tracking. Specifically, the manifold learning and the ordinary differential equations (ODEs)-based liquid neural network were integrated to compress the search space of the beamforming problem8. In9, a novel solution for robust continuous-time beam tracking leveraging a liquid neural network was proposed, dynamically adjusting the narrow millimeter-wave beams to ensure real-time beam alignment with mobile users.
Another new approach to beam management is to use digital twin technology to make real-time or near real-time decisions in the physical world. The rapid development of the Industrial Internet of Things (IIoT) has been a key enabler for digital twin technology. As a new paradigm, digital twin technology supports 6G communication systems in achieving key performance indicators of extremely reliable and low-latency communications2. Digital twin provides an approach to replicate the radio frequency (RF) propagation environment and the system behavior, allowing for an interactive way to optimize the performance of a deployed system based on simulations10,11. Indeed, there have been several novel researches on beam management-related topics based on digital twin throughout recent years. Digital replicas of the physical world can help reduce or even eliminate the multiple-input multiple-output channel acquisition overhead, facilitating fast beam tracking11. In12, an experimental 6G research platform for digital twin-enabled beam management was presented. This platform facilitates the development of smart radio environments using reconfigurable intelligent surfaces (RISs), with the digital twin serving as a virtual representation of a scaled laboratory deployment. This work demonstrates the feasibility and effectiveness of beam management based on digital twin. Although reconfigurable intelligent surfaces can provide virtual line-of-sight connectivity to facilitate beam alignment, this approach is costly. A pipeline for digital twin creation and channel simulator was proposed in10, which relied only on a single mounted camera and position information. The envisioned digital twin will leverage precise three-dimensional (3D) maps and fuse multi-modal sensory data from the physical world to construct an accurate and real-time digital replica13.
In this paper, we integrate environment information and dynamic channel information into a beam management scheme enabled by the concept of digital twin, enhancing the generalization capability of the channel twin model. Specifically, we propose a beam management scheme based on digital twin-enabled scenario cognition to meet both the requirements of high performance and low system overhead in diverse 6G scenarios.
System model for millimeter-wave mobile communications
System model
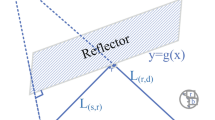
We consider the millimeter-wave communication system scenario as shown in Fig. 1, where the base station (BS) and user equipment (UE) are equipped with antenna arrays of sizes M and N, respectively. The element spacing between antennas is half the wavelength of the carrier frequency. During the t-th beam transmission period, the millimeter-wave downlink channel from the BS to the user equipment can be expressed as the matrix \(\mathbf{{H}}_{t}\) of size \(N \times M\), is given by6,14

System scenario of beamforming for millimeter-wave mobile communication.
where L denotes the number of paths, \(\mathop g\nolimits _{t,l}\) is the complex gain of the l-th path, \(\theta _{t,l}^{(n)}\) represents the angle of departure, \(\theta _{t,l}^{(m)}\) is the angle of arrival, \({\mathbf{{a}}^{(m)}}(\theta _{t,l}^{(m)})\) and \({\mathbf{{a}}^{(n)}}(\theta _{t,l}^{(n)})\) are steering vectors. \(\mathbf{{a}}(\theta )\) can be expressed as
Assume that the BS employs a uniform planar array (UPA) with Mx and My elements, the steering vector is given by
where \(\theta _{t,l}^{({m_x})}\) is the azimuth angle, \(\phi _{t,l}^{({m_y})}\) is the elevation angle, and \(\otimes\) is the Kronecker product.
In practical scenarios, the number of paths L tends to be small because only a few paths exhibit dominant energy. During the t-th beam transmission period, the BS transmits \({K_b} \cdot {K_u}\) pilot symbols to the user equipment using \({K_b}\) transmit beams and \({K_u}\) receive beams. Combining the received signals of downlink in a vector \({\mathop {{\textbf {y}}}\nolimits _{t}}\), we can obtain6
where \(vec( \cdot )\) denotes the vectorization operation, \({{\textbf{F}}_t} = [{{\textrm{f}} _{t,1}},...,{{\textrm{f}} _{t,{K_u}}}]\) and \({{\textbf{W}}_t} = [{{\textrm{w}} _{t,1}},...,{{\textrm{w}} _{t,{K_b}}}]\) are the beamforming and combining matrixes for transmitter beams and receiver beams, respectively. \(\mathop s\nolimits _{t}\) is the modulated symbol, and \({{\textbf{n}}_t} = {[{{\textrm{n}} _{t,1}},...,{{\textrm{n}} _{t,{K_b}{K_u}}}]^T}\) is the additive noise with the noise variance of \({\sigma ^2}\).
The signal-to-noise ratio (SNR) is expressed as SNR (\(SNR = {{{{\left| {\mathbf{{W}}_t^H{\mathbf{{H}}_t}{\mathbf{{F}}_t}} \right| }^2}} \big / {{\sigma ^2}}}\)), so the downlink data rate of the user equipment can be calculated as
Propagation attenuation for millimeter wave in environment
-
1)
The typical path loss model is given as1
$$\begin{aligned} PL(d)[\mathrm{{dB}}] = P({d_0}) + 10n\log (d/{d_0}) + X_\sigma , \end{aligned}$$(6)where \(P({d_0}) = 20\log (4\pi f{d_0}/c)\), \(d_0\) is the reference distance in meter, f is the center frequency of millimeter-wave signal in Hz, c is the speed of light in free space, n is the path loss exponent, and \(X_\sigma\) represents a zero-mean Gaussian distributed random variable with the standard deviation \(\sigma\).
-
2)
The vegetation attenuation model is given by15
$$\begin{aligned} L_{veg}[\mathrm{{dB}}] = A\mathop f\nolimits ^B {\log _{10}}({d_{tree}}){(\theta + E)^G} - 4, \end{aligned}$$(7)where f is the center frequency of millimeter-wave signal in MHz, and \({d_{tree}}\) represents the vegetation depth in meter. \(\theta\) is the elevation angle in degree from the BS antenna to the user equipment antenna as shown in Fig. 1. The A, B, E, and G are empirical found parameters, which can be found in reference15.
-
3)
The attenuation due to oxygen and water vapour can be formulated as16
$$\begin{aligned} {\gamma _{\mathrm{{atmo}}}[{\textrm{dB}}/{\textrm{km}}]} = {\gamma _o} + {\gamma _w} = F(f,p,e,T), \end{aligned}$$(8)where \({\gamma _o}\) and \({\gamma _w}\) are the specific attenuations due to oxygen and water vapour, respectively. f is the center frequency of the millimeter-wave signal in GHz, p represents the dry air pressure in hPa, e is the water vapour partial pressure in hPa, and T denotes temperature in Kelvin (K). Further details can be found in reference16.
The proposed beam management based on scenario cognition is implemented based on the system model and the propagation attenuation for millimeter wave in the environment. The channel information, beam information, and system performance can be calculated based on the system model. Antenna configurations and beam configurations can be dynamically adjusted based on scenario cognition using the propagation attenuation model.
Beam management for millimeter-wave mobile communications
Beam management based on scenario cognition
In the 3GPP standard, beam management consists of four key steps: beam sweeping, beam measurement, beam determination, and beam reporting2,3. Based on these steps, the proposed beam management method comprehensively considers the scenario characteristics for scenario cognition and the performance requirements of mobile communications. The scenario characteristics include the environment information and dynamic channel information. Digital twin-enabled scenario cognition consists of two approaches: (i) creating high-precision digital replicas using 3D models of environments, and (ii) refining and updating the digital replicas based on real-time channel information measured by the BS. The specific entity of the digital replica in beam management based on scenario cognition is the generation of the radio environment map (REM). The concept of the radio environment map was first proposed for cognitive radio and intelligent communication systems17. It is envisioned that the radio environment map is a digital twin replica that will be continuously refined and updated, encompassing computation, inference, and decision-making capabilities. The radio environment map encompasses multiple layers of information, with each row of semantic data containing: (a) the user equipment index, which is used to identify different user equipment; (b) the scenario cognition information, including 3D models (e.g., point clouds or digital maps), movement trajectories (i.e., the direction and movement traces of user equipment), and wireless channel characteristics (e.g., path loss, signal-to-noise ratio (SNR)); (c) the network information, including performance requirements, and the network configuration of the BS; and (d) the corresponding system configuration information, including antenna configurations and beam configurations. The radio environment map is deployed on the edge server, which can be promptly accessed and utilized by the user equipment or in vehicles.
The information included in the radio environment map can be used to perform beam management based on scenario cognition. Firstly, a high-precision digital replica of the physical world is created based on scenario cognition using environment information and the channel model. More specifically, the initial radio environment map can be constructed based on deterministic channel modeling (e.g., ray tracing simulation) using a 3D model of the environment, combined with the system model and propagation attenuation model in the “System model for millimeter-wave mobile communications” section. There are corresponding system configurations in the initial radio environment map, including antenna configurations and beam configurations. It is assumed that BSs are equipped with executable programs for environment sensing and channel sounding, which can be performed online. Environment sensing is used to sense the wireless environment characteristics (e.g., noise). The channel sounding is used to analyze time-varying channel characteristics (e.g., characteristics in power, delay, and angle domains). In the physical world, the BS performs wireless environment sensing and channel sounding in the presence of dynamic entities or non-target channel-sounding signals in the environment. Based on the real-time channel data measured by BS, the dynamic channel characteristics in the digital world are constantly updated. This enables near real-time mapping and synchronization between the physical world and the digital world. The BS determines whether the system configuration needs to be adjusted based on the real-time channel characteristics. Then the radio environment map would be updated accordingly.
By integrating scenario cognition into beam management, suitable antenna configurations and wide/narrow beams of uplink/downlink can be flexibly selected and adjusted, while meeting performance requirements and low system complexity. In this way, thanks to the cognition of the environment and channel, better proactive decisions can be fed back to the beam management in the physical world by performing the trade-off between system performance (e.g., SNR, bit error rate, and data rate) and system complexity.
Quantitative assessment of system complexity
In the beam management process, directional links consist of two aspects, initial access and beam tracking. During the initial access phase, the downlink measurement signals are synchronization signal (SS) blocks. During the beam tracking phase, the downlink measurement signals include both channel state information-reference signals (CSI-RSs) and synchronization signal blocks. The uplink measurement signals are sounding reference signals (SRSs)3,18. The formulas of system delay and overhead for the proposed method are given in this section.
System delay for millimeter-wave beam management is expressed as
where \(T_{access}\) represents the access delay and \(T_{tracking}\) refers to the beam tracking delay, respectively. \(N_{csi}\) is the number of CSI-RSs per SS burst periodicity, \(N_{sy,csi}\) is the number of symbols for a CSI-RS, \(T_{sy}\) is the duration of a symbol, and \(t_{out}\) is the outage duration (i.e., the period during which the system performance of the user equipment falls below the required threshold during beam adjustments). The system delay increases when the beam is frequently adjusted.
System overhead for millimeter-wave beam management is given by
where \({R_{SS\_blocks}} = 960{N_{SS\_blocks}}{T_{sy}}{N_{rep}}\Delta f\) denotes the time-frequency resources occupied by SS blocks, and \({R_{CSI - RS}} = {N_{csi}}{N_{sy,csi}}{T_{sy}}\beta B_w\) is the time-frequency resources occupied by CSI-RSs. \({N_{SS\_blocks}}\) is the number of synchronization signal block per burst, \({N_{rep}}\) is the number of repetitions of a synchronization signal block in the frequency domain, \(\Delta f\) is the subcarrier spacing, and \(\beta\) is the portion of bandwidth (\(B_w\)) for CSI-RSs. \({R_{UE}} = 48{T_{sy}}{N_{RB}}\Delta f{N_d}\) represents time-frequency resources occupied by physical resource blocks, where \({N_{RB}}\) is the number of physical resource blocks, and \({N_d}\) is the number of beam adjustments. \({R_{beam}} = 4{t_{out}}{T_{sy}}{N_{csi}}\) represents the time resource overhead due to beam adjustments. Finally, \({T_{SS}}\) is synchronization signal burst periodicity.
In this paper, the system complexity can be represented as the product of system overhead and system delay:
The system complexity is quantified when making the tradeoff in the proposed scheme. Therefore, the pre-validation of system performance can be performed quickly and rapid proactive decisions can be fed back to achieve a high degree of autonomy in millimeter-wave communication systems.
From equations (9)-(11), it can be seen that both \({T_{system}}\) and \(\Omega _{system}\) are affected by the number of beam adjustments. Thus, the system complexity is also influenced by the number of beam adjustments. We know that variations in the number of antennas can influence the beam pattern and the half-power beamwidth (simplified as \({\alpha _{3dB}} \propto \frac{1}{M}\), where \({\alpha _{3dB}}\) is half-power beamwidth, and M is the number of antenna arrays)19,20, thereby impacting beam adjustment during beam management process (simplified as \({N_d} \propto \frac{1}{{{\alpha _{3dB}}}} \propto M\)). For example, increasing the number of antenna arrays results in narrower beams, which enables more accurate alignment with the user equipment but may necessitate more frequent beam adjustments. Furthermore, system performance metrics (e.g., SNR and data rate) explicitly depend on the number of antenna arrays. Therefore, in the proposed beam management algorithm, the number of antenna arrays is the primary parameter adjusted when making a tradeoff between system complexity and system performance.
Algorithm of beam management
Asymmetric beam patterns are considered in the proposed scenario cognition-based beam management algorithm. In this paper, asymmetry refers to beam patterns are not same for uplink and downlink in millimeter-wave communications. For example, the BS adopts downlink narrow beams with high gain, and the user equipment uses downlink wide beams for receiving. Note that the activation and deactivation of the antenna array can be controlled by switches21,22, which in millimeter-wave systems can operate these switches can operate at the speeds on the order of sub-nanoseconds21. This ensures that the proposed method can keep up with the flexible beam tracking required for different system configurations.
The proposed algorithm is presented in Algorithm 1. In the given scenario, beam patterns with different azimuth angles are designed using the codebook. Based on scenario cognition, the beam configuration vectors \((\mathbf{{W}},\mathbf{{F}})\) can be obtained and saved to the radio environment map. As a result, fast directional initial access can be performed by the user equipment. The BS performs wireless environment sensing and channel sounding. Then SNR of the user equipment (\(SN{R_{UE}}\)) is calculated based on the real-time channel data measured by the BS. If \(SN{R_{UE}}\) is greater than the SNR threshold (\(SN{R_{th}}\)), the serving coverage of the beam (\({l_{beam}} = {{({h_{BS}} - {h_{UE}})} \big / {\tan ({{\theta - {\alpha _{3dB}}} \big / 2})}}\), where \(h_{BS}\) is the height of the BS antenna, \(h_{UE}\) is the height of the user equipment antenna, \(\theta\) is the elevation angle in degree from the BS antenna to the user equipment antenna, and \({\alpha _{3dB}}\) is the half-power beamwidth) is calculated. Subsequently, the beam direction is sequentially aligned to the user equipment through beam tracking within the serving coverage. As a result, the range of beam search and overhead of beam training can be reduced. As previously discussed, the beam pattern, beamwidth, and the number of beam adjustments (\({N_d}\)) are influenced by the number of antenna arrays (M) (simplified as \({N_d} \propto \frac{1}{{{\alpha _{3dB}}}} \propto M\)). If \(SN{R_{UE}}\) is less than \(SN{R_{th}}\), the beam pattern and beamwidth of BS will be adjusted by varying the number of antenna arrays through an increase or decrease in the variation (\(\Delta M\)). The system complexity (\({C_{Sys}}\)) and system performance (\({P_{Sys}}\), e.g., bit error rate) are then calculated. The appropriate value of M is obtained by finding the intersection between the two curves, where \(C_{S\mathrm{{ys}}}\) and \({P_{Sys}}\) vary with antenna configurations and beam configurations, respectively. Specifically, in this context, the chosen M is selected to make \(C_{S\mathrm{{ys}}}\) as small as possible, while ensuring that the bit error rate remains below the threshold (\({P}_{th}\)) that meets the service requirements. The BS searches for and adjusts the appropriate beam to align the beam of user equipment. Finally, the system configurations and scenario cognition information in the radio environment map are updated accordingly.

Proposed beam management
Comparative analysis
In this paper, both the movement trajectory and user equipment locations are considered together to reduce the range of beam search and overhead of beam training. The appropriate system configuration can be obtained iteratively through a tradeoff between the system performance and system complexity. Based on the feedback of environment information, the repetitive system overhead is gradually reduced. The proposed method has a complexity of computation in the order of \(O({N_p}{D_p})\), where \({N_p}\) is the number of beam adjustments along the movement trajectory, and \({D_p}\) denotes the size of the radio environment map.
Two baseline algorithms are compared in Table 1. Note that the baseline algorithm-13 lacks the capability for beam tracking. Specifically, its beam patterns are generated for multiple directions within the BS’s cell area by designing a beam codebook. In the baseline algorithm-1, the BS frequently adjusts the directional beam across the entire beam search range to serve the user equipment at each location. Baseline algorithm-1 has a complexity of computation in the order of \(O(({N_{b1})}^{{W_{b1}}})\), where \({N_{b1}}\) is the number of beam adjustments along the movement trajectory when using baseline algorithm-1, and \({W_{b1}}\) is the codebook size. The baseline algorithm-2 is based on a long short-term memory (LSTM) network to predict beam angles using existing datasets, so the overhead caused by frequent beam training can be reduced23. Baseline algorithm-2 has a complexity of computation in the order of \(O({N_{b2}}{{W_{b2}}})\), where \({N_{b2}}\) is the number of beam adjustments along the movement trajectory when using the baseline algorithm-2, and \({W_{b2}}\) is the codebook size. The two baseline algorithms (i.e., exhaustive search-based method, and machine learning-based method (long short-term memory (LSTM) network-based method) are widely recognized as conventional methods in the literature2,3,4,5,24.
Simulation results
In this section, the performance of the proposed method is evaluated. The BS is located at the origin of coordinates, and its cell radius is 577 m. In the simulation, the obstructed line of sight is considered. There are uneven cedar trees distributed along the movement trajectory of user equipment, which conform to characteristics of random distribution in an actual environment. The length of this movement trajectory of the user equipment is 1000 m, and the trajectory is within the sector service range of the BS. To simulate real-world variability, a disturbance is added to each user equipment location. So the user equipment locations are slightly different for multiple simulations to simulate the varying locations in the mobile communication. As larger-scale antenna arrays can cause narrower beams, the number of beams will increase. For simplicity, the beam interval corresponding to the minimum antenna configuration (\(2 \times 2\) UPA in the simulation) is used as the initial beam adjustment interval. Under different antenna configurations, a 0.5-degree variation is applied to adjust the beam interval, thereby modifying the number of beams. This adjustment allows the number and direction of beams to vary according to different antenna setups. Table 2 lists the major simulation parameters.

Comparison of the CDF of user equipment’s data rate.

Comparison of beam adjustments.

Comparison of system delay and system overhead.

A tradeoff between the system performance (downlink bit error rate at a given location along the movement trajectory) and system complexity (in terms of the product of overhead and delay).

The impact of the size of the radio environment map on the proposed algorithm.
Figure 2 shows the cumulative distribution function (CDF) curve of user equipment’s data rate when using the proposed method, the baseline algorithm-2, and the baseline algorithm-3. In the simulation, the BS is equipped with the \(2 \times 128\) UPA, and the user equipment is equipped with a 2-element uniform linear array (ULA). It can be seen that the result of the proposed method is better than that of the baseline algorithm-2. Indeed, the proposed method does not require a large amount of data to train a neural network model and it has a short running time with acceptable robustness. Although the baseline algorithm-2 may be able to achieve a good result, however, it requires more training data and longer training time, which is not suitable for practical application.
Figure 3 depicts the number of beam adjustments over 10 simulation runs when the BS and the user equipment are equipped with the \(2\times128\) UPA and the 2-element ULA, respectively. The average of beam adjustments when using the proposed algorithm is 118, while the average of beam adjustments when using the baseline algorithm-1 is 163. The overhead caused by beam adjustment is reduced by 27%.
The comparison results of system delay and system overhead under multiple simulations are shown in Fig. 4. To facilitate the calculation and comparison, \(\Delta t\) is used as the quantization unit for system delay in the simulation. Figure 4 illustrates that the decrement percentage of the proposed method on the system overhead is about 30%, and the decrement percentage on the system delay is about 17%. On the whole, both system delay and overhead are reduced to varying degrees.
The results of the proposed millimeter-wave beam management under different system configurations are shown in Fig. 5. Appropriate antenna configuration and beam configuration can be obtained by a tradeoff between the system performance and system complexity. As the number of uplink and downlink antennas increases, the bit error rate (i.e., the system performance) gradually decreases, but the product of system overhead and system delay (i.e., the system complexity) increases rapidly. Therefore, it is possible to reduce system delay and overhead as much as possible while maintaining acceptable performance according to system requirements. The more appropriate system configurations, i.e., beam configurations and antenna configurations can be selected on the premise of meeting performance requirements, rather than always choosing the largest antenna configuration.
To analyze the impact of the size of the radio environment map on the proposed algorithm, system complexity, mean complexity, and running time of the proposed algorithm under different lengths of movement trajectories have been compared. To facilitate the analysis, we approximate the size of the radio environment map using the different lengths of movement trajectories. The simulation environment is Windows 11 using MATLAB 2023b. The ideal maximum coverage range of a single base station in the millimeter-wave system can be calculated by equation (6), which is approximately 980 m. Figure 6 shows that the running time of the proposed algorithm increases linearly with the length of movement trajectories under the given simulation environment. When the length of movement trajectories is less than about 920 m, the system complexity grows at a relatively slow rate. However, beyond approximately 920 m, the system complexity exhibits a more pronounced increase with the length of movement trajectories. This observation aligns well with the theoretical expectation that the maximum coverage range of a single base station in a millimeter-wave system can serve as the upper limit for the maximum trajectory length in the radio environment map. Notably, the mean complexity does not show a significant increase with the growing length of movement trajectories and remains within an acceptable level for an individual user. These results indicate that effective use of the radio environment map can enhance beam management without incurring significant computational overhead.
Summary
In this paper, a beam management method for millimeter-wave mobile communications based on digital twin-enabled scenario cognition is proposed. By mapping scenario characteristics to beam management, appropriate beam configurations and antenna configurations can be selected by the tradeoff between system performance and system complexity. Simulation shows that the proposed scheme effectively enables flexible beam tracking while reducing system overhead and delay. For future work, it is worthwhile to analyze the influence of various interferences of neighboring BSs on the serving BS.
Data availability
All data generated or analysed during this study are included in this published article.
References
Rappaport, T. S. et al. Overview of millimeter wave communications for fifth-generation (5G) wireless networks—with a focus on propagation models. IEEE Trans. Antennas Propag. 65, 6213–6230 (2017).
Xue, Q. et al. A survey of beam management for mmWave and THz communications towards 6G. IEEE Commun. Surveys Tuts. 26, 1520–1559 (2024).
Giordani, M., Polese, M., Roy, A., Castor, D. & Zorzi, M. A tutorial on beam management for 3GPP NR at mmWave frequencies. IEEE Commun. Surveys Tuts. 21, 173–196 (2019).
Yi, W., Zhiqing, W. & Zhiyong, F. Beam training and tracking in mmWave communication: A survey. China Commun. 21, 1–22 (2024).
Bang, J. et al. Millimeter-wave communications: Recent developments and challenges of hardware and beam management algorithms. IEEE Commun. Mag. 59, 86–92 (2021).
Lim, S. H., Kim, S., Shim, B. & Choi, J. W. Deep learning-based beam tracking for millimeter-wave communications under mobility. IEEE Trans. Commun. 69, 7458–7469 (2021).
Zhang, J., Huang, Y., Wang, J., You, X. & Masouros, C. Intelligent interactive beam training for millimeter wave communications. IEEE Trans. Wireless Commun. 20, 2034–2048 (2021).
Wang, X. et al. Robust beamforming with gradient-based liquid neural network. IEEE Wireless Commun. Lett. 13, 3020–3024 (2024).
Zhu, F. et al. Robust continuous-time beam tracking with liquid neural network. arXiv preprint arXiv:2405.00365 (2024).
Arnold, M., Major, B., Massoli, F. V., Soriaga, J. B. & Behboodi, A. Vision-assisted digital twin creation for mmWave beam management. In 2024 IEEE International Conference on Communications (ICC), 1–6 (2024).
Jiang, S. & Alkhateeb, A. Digital twin based beam prediction: Can we train in the digital world and deploy in reality? In 2023 IEEE International Conference on Communications Workshops (ICC Workshops), 36–41 (2023).
Heimann, K., Häger, S. & Wietfeld, C. Demo abstract: Experimental 6G research platform for digital twin-enabled beam management. In Proceedings of the International ACM Symposium on Mobility Management and Wireless Access (MobiWac), 125–128 (2023).
Alkhateeb, A., Jiang, S. & Charan, G. Real-time digital twins: Vision and research directions for 6G and beyond. IEEE Commun. Mag. 61, 128–134 (2023).
Yang, X., Jin, S., Li, G. Y. & Li, X. Asymmetrical uplink and downlink transceivers in massive MIMO systems. IEEE Trans. Veh. Technol. 70, 11632–11647 (2021).
International Telecommunication Union (ITU). Attenuation in vegetation. Recommendation ITU-R P.833-10, ITU Radiocommunication Sector (2021).
International Telecommunication Union (ITU). Attenuation by atmospheric gases and related effects. Recommendation ITU-R P.676-12, ITU Radiocommunication Sector (2022).
Zhao, Y. Enabling cognitive radios through radio environment maps. Ph.d. dissertation, Virginia Polytechnic Inst. State Univ., Blacksburg, VA, USA (2007).
3rd Generation Partnership Project (3GPP). Physical layer procedures for data. Technical Specification 38.214 (V16.6.0), 3GPP (2021).
Trees, H. L. V. Optimum array processing: Part IV of detection, estimation, and modulation theory (John Wiley & Sons, 2002).
Chung, H., Kang, J., Kim, H., Park, Y. M. & Kim, S. Adaptive beamwidth control for mmWave beam tracking. IEEE Commun. Lett. 25, 137–141 (2021).
Schmid, R. L., Song, P., Coen, C. T., Ulusoy, A. C. & Cressler, J. D. On the analysis and design of low-loss single-pole double-throw W-Band switches utilizing saturated SiGe HBTs. IEEE Trans. Microw. Theory Tech. 62, 2755–2767 (2014).
Han, S., I, C.-l., Xu, Z. & Rowell, C. Large-scale antenna systems with hybrid analog and digital beamforming for millimeter wave 5G. IEEE Commun. Mag. 53, 186–194 (2015).
Wang, C. et al. FC-BET: A fast consecutive beam tracking scheme for mmWave vehicular communications. In 2021 IEEE Wireless Communications and Networking Conference (WCNC), 1–6 (2021).
3rd Generation Partnership Project (3GPP). Technical specification group radio access network; study on new radio access technology physical layer aspects (release 14) (2017).
Author information
Authors and Affiliations
Contributions
Y.H. and Y.Z. conceived and designed the study. Y.H. carried out simulations and wrote the original draft. All authors reviewed the manuscript.
Corresponding author
Ethics declarations
Competing interests
The authors declare no competing interests.
Additional information
Publisher’s note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution-NonCommercial-NoDerivatives 4.0 International License, which permits any non-commercial use, sharing, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if you modified the licensed material. You do not have permission under this licence to share adapted material derived from this article or parts of it. The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by-nc-nd/4.0/.
About this article

Cite this article
Huang, Y., Zhao, Y. Beam management for millimeter-wave mobile communications based on digital twin-enabled scenario cognition. Sci Rep 15, 13802 (2025). https://doi.org/10.1038/s41598-025-97636-6
Received:
Accepted:
Published:
Version of record:
DOI: https://doi.org/10.1038/s41598-025-97636-6
