
Abstract
In this paper, we deal with the (n+1)-dimensional generalized Kadomtsev-Petviashvili equation (dgKPE). This is an important model in nonlinear science, with applications in various fields. Its integrability and rich soliton dynamics continue to attract researchers interested in the field of nonlinear partial differential equations (NLPDEs). We are interested in the new auxiliary equation method (NAEM). We reduce the equation to an ordinary differential equation (ODE) with the help of an appropriate wave transformation and search for different types of soliton solutions. Additionally, we demonstrated the efficacy of the NAEM as a straightforward yet powerful mathematical instrument for handling challenging issues, highlighting its potential to resolve the challenging problems related to the study of nonlinear equations. This technique yields several types of solutions for (n+1)-dgKPE, including trigonometric, hyperbolic, shock wave, singular soliton, exponential, and rational functions. A range of graphs showcasing the results are reviewed, as well as the wave behavior for the solutions in different circumstances. The obtained data provide important information for studying hydrodynamic waves, plasma fluctuations, and optical solitons. They also aid in understanding the behavior of the KPE in different physical situations. We clarify in this article how the (n+1)-dgKPE, when combined with NAEM, can result in better data transmission rates, optimized optical systems, and the advancement of nonlinear optics toward more dependable and efficient communication technologies. The obtained information clarifies the equation and opens up new avenues for investigation. To our knowledge, for this equation, these methods of investigation have not been utilized before. The accuracy of each solution has been verified using the Maple software program.
Similar content being viewed by others

Introduction
Nonlinear phenomena are useful in many fields, such as physics, mathematics, science, and engineering. One of the most important tasks in the study of nonlinear science is the explicit solution of NLPDEs. Many integral strategies are commonly used by researchers to find soliton solutions for these equations. Some of the primary techniques employed in this process are covered in this presentation. The unified method1 , the Kudryashov method2,3 , the new extended auxiliary equation method4 , the Khater II (Khat II) method5 , the Jacobi elliptic wave function method6 , the modified sub-equation method7,8,9 , modifed exponential rational functional method10 , Lie symmetry analysis11,12 , the extended sinh-Gordon equation expansion method13 , the exp-function method14 , modified extended auxiliary equation mapping method15 , the modified F-expansion method16 , the unified Riccati equation expansion method17 and much more.
Solitons are phenomena that arise in some solutions of evolution equations and reflect a careful balance between dispersion effects and nonlinear interactions. The literature discusses various varieties of solitons, such as lump, moving wave, single, and dark-bright solitons. A single-soliton solution, additionally known as a solitary wave, changes into one while maintaining its shape and speed throughout propagation when it is separated from other solitons18 .
This research indicates that numerous soliton-type wave solutions have been created for the (n+1)-dgKPE. Established thanks to Kadomtsev and Petviashvili19 , this equation was initially devised as a higher-dimensional expansion for the Korteweg-de Vries (KdV) equation to the examination of soliton solutions under modest transverse disturbances. Ever since it was introduced, the KPE has become the subject of numerous inquiries. By examining the integrability for the (n+1)-dgKPE, Xu and Wazwaz20 intended to offer a more thorough foundation for the traditional KPE.
This study focuses to the (n+1)-dgKPE20,21,22 :
In the aforementioned equation, \(\Phi\) denotes a differentiable function taking into account the temporal variable t and the spatial variables x. \(R\ge 2\) is an integer. The subscripts in the formula indicate the partial derivatives of the functions. Xu and Wazwaz state that \({{\theta }_{1}}\), \({{\theta }_{2}}\), \({{\theta }_{3}}\), and \({{\Theta }_{k}}\left( k=1,2,3 \ldots R \right)\) are constant parameters20 . Among other domains, dynamics of fluids, plasma physics, and non-linear optics all heavily rely on the (n+1)-dgKPE. Its exceptional adaptability for simulating multidimensional wave events substantially facilitates the study of a broad spectrum of physical systems. Because of its intricate mathematical structure and broad range of solutions, it is a crucial issue for researchers interested in mathematical science or nonlinear dynamics.
The KPE can be used to describe things like solitons, intricate wave interactions, and particles acting like particles. Its ability to depict and capture complex processes outside the scope of linear models is enhanced by its nonlinear characteristics. Therefore, the (n+1)-dgKPE is an especially powerful and insightful tool for examining complex behaviors in higher-dimensional scenarios.
The N-soliton solution and significant integrability features are shown by the (n+1)-dgKPE, as reported by Xu and Wazwaz’s study20 . Using the dual Bell polynomial technique and the singularity manifold analysis, the equation’s complete integrability is shown by Bäcklund transformations, the Painlevé property, a Lax pair, and an infinite number of conservation laws. Raza et al.21 concentrated their investigation on getting Auto-Bäcklund transformations to the model via the extended homogeneous balance (HB) technique. They could also solve exponential functions by creating a bilinear Bäcklund transformation depending on the Hirota bilinear form. In addition, they looked at complexiton solutions for the KPE using the bilinear form and the extended transformed rational function approach.
This study emphasizes how new methods of problem-solving are required to identify the mathematical patterns that underlie actual physical systems. We offer an effective analytical method that generates novel and efficient wave solutions for the (n+1)-dgKPE via finite series expansion, demonstrating previously unreported outcomes. These techniques are useful resources for researchers working on complicated mathematical issues in various scientific domains. By offering efficient solutions, particularly for complex and high-dimensional systems, the proposed method addresses the constraints of the present approaches. In this sense, it provides useful and appropriate solutions to problems that are commonly found in the literature. Researchers can also create novel approaches and provide previous theories with more depth thanks to it.
This study is organized as follows: Sect. 2 gives a description of the NAEM. In Sect. 3, the offered method is applied to discover analytical solutions of the (n+1)-dgKPE. Comparisons are provided in Sect. 4. Numerical representations are given in Sect. 5 and Conclusions are presented in Sect. 6.
The NAEM
Consider the following NLPDE:
where an unknown function with its partial derivatives given \(x_{1},x_{2},...,x_{R}\) and t is indicated by the expression \(\Phi = \Phi (x_{1},x_{2},...,x_{R},t)\).
Thanks to the following wave transformation
Eq. (2) is reduced to an ordinary differential equation (ODE) as follows:
In Eq. (3), w is the wave speed.
The following will be the processes that are given for implementing the NAEM23 :
Step 1. Eq. (4) has the following solution form:
in which the real constants \({h}_{i}\) and the function \(g(\xi )\) satisfy the first-order ODE given by:
Using \(\lambda\), y, and \(\mu\) are real constants, the application of Eq. (6) is described below:
Step 2. The principle of balance can be applied to Eq. (4) to determine the value of R.
Step 3. After Eq. (5) and its derivatives are inserted into Eq. (4) utilizing the wave transformation specified by Eq. (6), \(L^{g(\xi )}\) becomes a polynomial. A system of equations is created by simplifying and setting as terms to zero. Computer algebra programs like Maple software can solve this system of equations effectively. The analytical solutions to Eq. (4) are obtained by solving this system.
Step 4. Finally, by using the transformation method from Eq. (3) and the solutions discovered from Eq. (4), we discover a range for analytical solutions to Eq. (2). Determine the solutions to Eq. (6) by employing a particular method.
Type 1. If \(\lambda \ne 0\) and \(4\lambda \mu -{{y}^{2}}<0\), then
Type 2. If \(\lambda \ne 0\) and \(4\lambda \mu -{{y}^{2}}>0\), then
Type 3. If \(-4{{\mu }^{2}}-{{y}^{2}}<0\), \(\lambda =-\mu\) and \(\lambda \ne 0\), then
Type 4. If \(4{{\mu }^{2}}+{{y}^{2}}>0\) and \(\lambda =-\mu\), then
Type 5. If \(4{{\mu }^{2}}+{{y}^{2}}<0\) and \(\lambda =\mu\), then
Type 6. If \(-4{{\mu }^{2}}+{{y}^{2}}>0\) and \(\lambda =\mu\), then
Type 7. If \({{y}^{2}}=4{\mu }\lambda\), then
Type 8. If \({\mu }\lambda <0\), \(\lambda \ne 0\) and \(y=0\), then
Type 9. If \({\mu }=-\lambda\) and \(y=0\), then
Type 10. If \({\mu }=\lambda =0\), then
Type 11. If \({\mu }=K=y\) and \(\lambda =0\), then
Type 12. If \({\lambda }=K=y\) and \(\mu =0\), then
Type 13. If \(y=\lambda +\mu\), then
Type 14. If \(y=-\lambda -\mu\), then
Type 15. If \(\mu =0\), then
Type 16. If \(\lambda =y=\mu \ne 0\), then
Type 17. If \(\lambda =y=0\), then
Type 18. If \(\mu =y=0\), then
Type 19. If \(\mu =\lambda\) and \(y=0\), then
Type 20. If \(\lambda =0\), then
Here l and n are named deformation parameters and they are positive.
Extraction of soliton solutions
In this section, we develop the analytic solutions of the Eq. (1) using the NAEM.
Consider the following transformation:
Substituting Eq. (34) into the Eq. (1), we get
Here, \(\theta _{1}, \theta _{2}, \theta _{3}\) and \({\Theta }_{k}(k=1,2,3 \dots ,R)\) denote constant parameters. We integrate Eq. (35) twice concerning the variable \(\xi\), assuming that the constants of integration are zero, to arrive at the following result:
Implementing the NAEM
In the event that \(Q^2\) and \(Q^{\prime \prime }\) are balanced, \(R=2\) will be the outcome. Using Eq. (5), we obtain
Let \(m=\sum \limits _{k=1}^{R}{{{\Theta }_{k}}}\) to simplify things. We derive the subsequent algebraic equations:
We find two clusters of solutions by solving the Eq. (38):
Cluster 1.
Eq. (1) is solved for the cases covered in the preceding section by using Eqs. (7)–(33) in conjunction with Eqs. (34) and (37). The following solutions occur in this situation:
Type 1. If \(\lambda \ne 0\) and \(4\lambda \mu -{{y}^{2}}<0\), then the next trigonometric solutions are obtained:
Type 2. If \(\lambda \ne 0\) and \(4\lambda \mu -{{y}^{2}}>0\), then the subsequent shock solution is expressed:
The singular solution is discovered as:
Type 3. If \(-4{{\mu }^{2}}-{{y}^{2}}<0\), \(\lambda =-\mu\) and \(\lambda \ne 0\), then the following trigonometric solutions are obtained:
Type 4. If \(4{{\mu }^{2}}+{{y}^{2}}>0\) and \(\lambda =-\mu\), then the next shock wave solution is found:
The singular solution is reached as:
Type 5. If \(4{{\mu }^{2}}+{{y}^{2}}<0\) and \(\lambda =\mu\), then the subsequent trigonometric solutions are obtained:
Type 6. If \(-4{{\mu }^{2}}+{{y}^{2}}>0\) and \(\lambda =\mu\), then the following shock wave solution is attained:
The singular solution is discovered as:
Type 7. If \({{y}^{2}}=4{\mu }\lambda\), then the next only one solution is given:
Type 8. If \({\mu }\lambda <0\), \(\lambda \ne 0\) and \(y=0\), then the subsequent shock wave solution is reached:
The singular wave solution is attained as:
Type 9. If \({\mu }=-\lambda\) and \(y=0\), then the next plane solution is obtained:
Type 10. If \({\mu }=\lambda =0\), then the subsequent mixed hyperbolic solutions are found:
Type 11. If \({\mu }=K=y\) and \(\lambda =0\), then the following plane solution is obtained:
Type 12. If \({\lambda }=K=y\) and \(\mu =0\), then the next plane solution is found:
Type 13. If \(y=\lambda +\mu\), then the subsequent plane solution is reached:
Type 14. If \(y=-\lambda -\mu\), then the following plane solution is attained:
Type 15. If \(\mu =0\), then the next plane solution is discovered:
Type 16. If \(\lambda =y=\mu \ne 0\), then the subsequent trigonometric solutions is given:
Type 17. If \(\lambda =y=0\), then the following only one solution is yield:
Type 18. If \(\mu =y=0\), then the next only one solution is obtained:
Type 19. If \(\mu =\lambda\) and \(y=0\), then the subsequent trigonometric solutions is discovered:
Type 20. If \(\lambda =0\), then the following plane solution is reached:
Note: For solutions Eqs. (40)–(66), \(\xi\) is given by \(\xi =\sum \limits _{k=1}^{R}{{{x }_{k}}-\left( -4\lambda \mu {{\theta }_{2}}+{{y}^{2}}{{\theta }_{2}}+m+{{\theta }_{3}}\right) t}\).
Cluster 2.
Utilizing the above parameters, we construct the following solutions:
Type 1. If \(\lambda \ne 0\) and \(4\lambda \mu -{{y}^{2}}<0\), then we get
Type 2. If \(\lambda \ne 0\) and \(4\lambda \mu -{{y}^{2}}>0\), then we obtain
Type 3. If \(-4{{\mu }^{2}}-{{y}^{2}}<0\), \(\lambda =-\mu\) and \(\lambda \ne 0\), then we reach
Type 4. If \(4{{\mu }^{2}}+{{y}^{2}}>0\) and \(\lambda =-\mu\), then we discover
Type 5. If \(4{{\mu }^{2}}+{{y}^{2}}<0\) and \(\lambda =\mu\), then we find
Type 6. If \(-4{{\mu }^{2}}+{{y}^{2}}>0\) and \(\lambda =\mu\), then we get
Type 7. If \({{y}^{2}}=4{\mu }\lambda\), then we attain
Type 8. If \({\mu }\lambda <0\), \(\lambda \ne 0\) and \(y=0\), then we discover
Type 9. If \({\mu }=-\lambda\) and \(y=0\), then we yield
Type 10. If \({\mu }=\lambda =0\), then we have
Type 11. If \({\mu }=K=y\) and \(\lambda =0\), then we reach
Type 12. If \({\lambda }=K=y\) and \(\mu =0\), then we obtain
Type 13. If \(y=\lambda +\mu\), then we have
Type 14. If \(y=-\lambda -\mu\), then we obtain
Type 15. If \(\mu =0\), then we get
Type 16. If \(\lambda =y=\mu \ne 0\), then we reach
Type 17. If \(\lambda =y=0\), then we attain
Type 18. If \(\mu =y=0\), then we yield
Type 19. If \(\mu =\lambda\) and \(y=0\), then we have
Type 20. If \(\lambda =0\), then we obtain
For solutions Eqs. (67)–(93), \(\xi\) is given by \(\xi =\sum \limits _{k=1}^{R}{{{x }_{k}}-\left( 4\lambda \mu {{\theta }_{2}}-{{y}^{2}}{{\theta }_{2}}+m+{{\theta }_{3}}\right) t}\).
Comparisons
In this section, we will emphasize the importance of our proposed method. Xu and Wazwaz20 examined the governing model and used the binary Bell polynomial method and singularity manifold analysis to find several analytical solutions. Even though they resulted in distinct wave models, our proposed method changes this approach to give a range of innovative soliton solutions, including plane, shock, singular, mixed trigonometric, and mixed hyperbolic types. We show the novelty and improvement of our results, which present novel solutions never published before, by comparing them with those of Xu and Wazwaz20. These groundbreaking findings have important implications for the mathematics of physics and nonlinear optics as well as new directions to study higher-order PDEs. Our contributions provide a comprehensive and influential investigation of soliton solutions and their various wave phenomena.
Numerical representations
This part includes a detailed explanation of our findings using 3D and 2D figures, as well as a comprehensive analysis of density plots through parameter adjustments. The assumption used to generate graphs is that \(x_{2},...,x_{M}=0\). In the past few years, a wide range of fields have shown a great deal of interest in the research of analytical solutions for NLPDEs and modeling of solitary wave phenomena, particularly optical science, plasma physics, and the biological sciences. We provide a study that looks at the physical characteristics of these solutions and considers their uses.

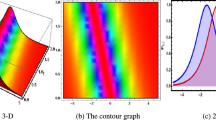
Visual interpretations of solution \(\Phi _{01}(x_{1},t)\) for Eq. (40) is presented. (a) 3D plot, (b) 2D plot, and (c) density plot, where \(\theta _{3}=3\), \(\theta _{2}=2\), \(\lambda =2\), \(m=10\), \(\theta _{1}=1\), \(\mu =3\), \(y=5\).

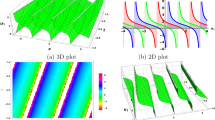
A graphical depiction of \(\Phi _{11}(x_{1},t)\) for Eq. (50) is shown, (a) 3D plot, (b) 2D plot, and (c) density plot when \(\theta _{3}=1.5\), \(\theta _{2}=2\), \(\lambda =2\), m=1, \(\theta _{1}=1\), \(\mu =2\), \(y=5\).

A graphical depiction of \(\Phi _{15}(x_{1},t)\) for Eq. (54) is shown, (a) 3D plot, (b) 2D plot, and (c) density plot when \(\lambda =1\), \(\theta _{3}=1\), \(\theta _{2}=1\), m=1, \(\theta _{1}=1\), \(\mu =1\), \(y=1\).

The graphical representation of \(\Phi _{18}(x_{1},t)\) for Eq. (57) is presented. (a) 3D plot, (b) 2D plot, and (c) density plot, where \(\theta _{3}=1\), \(\theta _{2}=1\), \(m=2\), \(\theta _{1}=1\), \(\mu =1\), \(\lambda =1\), \(y=1\).

Graphical interpretations for solution \(\Phi _{20}(x_{1},t)\) for Eq. (59) using \(\theta _{3}=1\), \(\theta _{2}=1\), \(m=2\), \(\theta _{1}=1\), \(\mu =1.5\), \(\lambda =-0.5\), \(y=1\).
The research data highlight several noteworthy physical properties. The transformations selected for the variables and coefficients are essential to understanding the model’s analytical solutions as well as their practical applications. These results suggest that different types of solitary wave solutions are generated in optical fibers by maintaining the form and speed of the waves during propagation while balancing nonlinear interactions and dispersive effects. By carefully choosing the settings, these solitons can be handled effectively.
Conclusions
This work aims at the (n+1)-dgKPE, which describes a wide variety of applications in a variety of physical systems, including fluid physics, plasma physics, Bose-Einstein condensates, and optical fibers. In this study we used NAEM. Numerous soliton solutions, including singular periodic wave solutions, shock wave solutions, mixed trigonometric solutions, exponential function solutions, and hyperbolic solutions, were obtained as possible results of the NAEM. 3D, 2D, and density plots that enhance the visualization of the solution set under various parameter changes, Fig. 1, 2, 3, 4, and 5 supporting the main results of the study. Figure 1 shows that we achieve a bright soliton for the trigonometric function solution Eq. (40) for different parameter values, while Figure 2 shows that we find a kink soliton solution for the shock wave solution Eq. (50). Figure 3 shows that we attain a periodic soliton for the singular wave solution of Eq. (54). Figure 4 shows the existence of the dark soliton, which is observed as a plane solution in the solution of Eq. (57). Figure 5 shows that we attain a plane solution for the bright soliton solution of Eq. (59). A thorough overview of the solutions was given by these graphs. Appropriate parameter values are essential to avoiding infinities and achieving realistic findings, which are necessary for physically meaningful results. Furthermore included is a comparison of the outcomes. In addition to its many uses in simulating the propagation and interaction of soliton waves, (n+1)-dgKPE is essential for comprehending wave behavior in fluid dynamics, plasma physics, and optical fibers. The (n+1)-dgKPE solutions that are developed in this context serve as a crucial foundation for future study and applications in related domains and aid in our understanding and control of complicated dynamics in physical systems. Efficient approaches have been employed in several investigations to get analytic solutions, and the resulting outcomes have made significant contributions to both mathematics and physics. When the findings are displayed visually and are the subject of comparison analysis, these investigations are more thorough and accurate. Future studies could examine the various behaviors of these solutions and the effects of other parameters or approaches on the proposed model to discover novel phenomena.
Data availability
All data generated or analyzed during this study are included in this published article.
References
Kumar, A. & Kumar, S. Dynamic nature of analytical soliton solutions of the (1+ 1)-dimensional Mikhailov-Novikov-Wang equation using the unified approach. Int. J. Math. Comput. Eng. (2023).
Barman, H. K., Islam, M. E. & Akbar, M. A. A study on the compatibility of the generalized Kudryashov method to determine wave solutions. Propulsion Power Res. 10(1), 95–105 (2021).
Tetik, D., Akbulut, A. & Çelik, N. Applications of two kinds of Kudryashov methods for time fractional (2+ 1) dimensional Chaffee-Infante equation and its stability analysis. Opt. Quant. Electron. 56(4), 640 (2024).
Mathanaranjan, T., Hashemi, M. S., Rezazadeh, H., Akinyemi, L. & Bekir, A. Chirped optical solitons and stability analysis of the nonlinear Schrödinger equation with nonlinear chromatic dispersion. Commun. Theor. Phys. 75(8), 085005 (2023).
Khater, M. M. Computational method for obtaining solitary wave solutions of the (2+ 1)-dimensional AKNS equation and their physical significance. Mod. Phys. Lett. B 38(19), 2350252 (2024).
El-Shiekh, R. M., Gaballah, M. & Elelamy, A. F. Similarity reductions and wave solutions for the 3D-Kudryashov-Sinelshchikov equation with variable-coefficients in gas bubbles for a liquid. Res. Phys. 40, 105782 (2022).
Akinyemi, L. et al. Effects of the higher-order dispersion on solitary waves and modulation instability in a monomode fiber. Optik 288, 171202 (2023).
Murad, M. A. S., Ismael, H. F., Hamasalh, F. K., Shah, N. A. & Eldin, S. M. Optical soliton solutions for time-fractional Ginzburg-Landau equation by a modified sub-equation method. Res. Phys. 53, 106950 (2023).
Zayed, E. M., Al-Nowehy, A. G. & Shohib, R. M. New sub-equation method to construct solitons and other solutions for perturbed nonlinear Schrödinger equation with Kerr law nonlinearity in optical fiber materials. J. Ocean Eng. Sci. 4(1), 14–23 (2019).
Iqbal, M. S., Seadawy, A. R., Baber, M. Z. & Qasim, M. Application of modified exponential rational function method to Jaulent-Miodek system leading to exact classical solutions. Chaos Solitons Fractals 164, 112600 (2022).
Rizvi, S. T. R., Ali, K., Aziz, N. & Seadawy, A. R. Lie symmetry analysis, conservation laws and soliton solutions by complete discrimination system for polynomial approach of Landau Ginzburg Higgs equation along with its stability analysis. Optik 300, 171675 (2024).
Kukkar, A., Kumar, S., Malik, S., Murad, M. A. S., Arnous, A. H., Biswas, A. & Alshomrani, A. S. Lie symmetry analysis of cubic-quartic optical solitons having cubic-quintic-septic-nonic form of self-phase modulation structure. J. Optics, 1-11 (2024).
Mathanaranjan, T. Optical solitons and stability analysis for the new (3+ 1)-dimensional nonlinear Schrödinger equation. J. Nonlinear Optical Phys. Mater. 32(02), 2350016 (2023).
He, J. H. & Wu, X. H. Exp-function method for nonlinear wave equations. Chaos Solitons Fractals 30(3), 700–708 (2006).
Iqbal, M. S., Seadawy, A. R., Baber, M. Z. & Qasim, M. Application of modified exponential rational function method to Jaulent-Miodek system leading to exact classical solutions. Chaos Solitons Fractals 164, 112600 (2022).
Patel, P. M. & Pradhan, V. H. Exact travelling wave solutions of Richards’ Equation by modified F-expansion method. Procedia Eng. 127, 759–766 (2015).
Sirendaoreji,. Unified Riccati equation expansion method and its application to two new classes of Benjamin-Bona-Mahony equations. Nonlinear Dyn. 89, 333–344 (2017).
Aldhafeeri, A. et al. Low phase noise K-band signal generation using polarization diverse single-soliton integrated microcombs. Photonics Res. 12(6), 1175–1185 (2024).
Kadomtsev, B. B. & Petviashvili, V. I. (1970). On the stability of solitary waves in weakly dispersing media. In Doklady Akademii Nauk (Vol. 192, No. 4, pp. 753-756). Russian Academy of Sciences.
Xu, G. Q. & Wazwaz, A. M. A new (n+ 1)-dimensional generalized Kadomtsev-Petviashvili equation: integrability characteristics and localized solutions. Nonlinear Dyn. 111(10), 9495–9507 (2023).
Raza, N., Deifalla, A., Rani, B., Shah, N. A. & Ragab, A. E. Analyzing Soliton Solutions of the (n+ 1)-dimensional generalized Kadomtsev-Petviashvili equation: Comprehensive study of dark, bright, and periodic dynamics. Res. Phys. 56, 107224 (2024).
Danladi, A. et al. On the soliton structures of the space-time conformable version of (n+ 1)-dimensional generalized Kadomtsev-Petviashvili (KP) equation. Opt. Quant. Electron. 56(7), 1126 (2024).
Faridi, W. A. et al. Analyzing optical soliton solutions in Kairat-X equation via new auxiliary equation method. Opt. Quant. Electron. 56(8), 1317 (2024).
Yao, S. W., Tariq, K. U., Inc, M. & Tufail, R. N. Modulation instability analysis and soliton solutions of the modified BBM model arising in dispersive medium. Res. Phys. 46, 106274 (2023).
Acknowledgements
The Researchers would like to thank the Deanship of Graduate Studies and Scientific Research at Qassim University for financial support (QU-APC-2025).
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflicts of interest
No competing interests are disclosed by the authors.
Additional information
Publisher’s note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution-NonCommercial-NoDerivatives 4.0 International License, which permits any non-commercial use, sharing, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if you modified the licensed material. You do not have permission under this licence to share adapted material derived from this article or parts of it. The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by-nc-nd/4.0/.
About this article

Cite this article
Kopçasız, B., Sağlam, F.N.K., Bulut, H. et al. Exploration of the soliton solutions of the (n+1) dimensional generalized Kadomstev Petviashvili equation using an innovative approach. Sci Rep 15, 14542 (2025). https://doi.org/10.1038/s41598-025-99080-y
Received:
Accepted:
Published:
Version of record:
DOI: https://doi.org/10.1038/s41598-025-99080-y
