
Abstract
Coastal subsidence exacerbates relative sea level rise, making low-lying areas vulnerable to flooding. In Hawai’i, the contribution of vertical land motion has not been fully studied. This is critical for urban O’ahu, where infrastructure is on low-lying coastal areas with varying sedimentary consolidation. Here we processed Interferometric Synthetic Aperture Radar data from 2006–2024 for the Hawaiian Islands, referencing them with Global Navigation Satellite System measurements to calculate subsidence rates. We also created a two-meter resolution digital elevation model for coastal O’ahu using 2007–2013 Federal Light Detection and Ranging data, which included hydro-enforcement and gap filling with reprocessed data. Using this elevation data and vertical land motion measurements, we numerically modeled flood exposure. Results suggest that while island-wide subsidence on O’ahu is about 0.6 ± 0.6 mm/yr, the south shore has localized rates exceeding 25.0 ± 1.0 mm/yr. This subsidence, which is much faster than Hawaii’s long-term sea level rise rate (1.54 mm/yr since 1905), could expand flood exposure by up to 53% by 2050 in the Mapunapuna industrial region. Accounting for subsidence compresses the timeline for flood preparedness by up to 50 years, emphasizing the need to integrate these insights into planning and policy for sustainable development and flood mitigation.
Similar content being viewed by others


Introduction
In Hawai’i, impacts of Sea Level Rise (SLR) are already widely observed, and include beach loss, coastal erosion, and flooding in the form of direct marine inundation, storm-drain back-flow, as well as groundwater inundation1,2,3. Particularly threatened are O’ahu’s many low-lying areas, including \({{\rm{Waik}}}{\bar{\i}}{{\rm{k}}}{\bar{\i}}\) and urban Honolulu, as well as many coastal roads and communities (Fig. 1)1,2,4. Hawai’i tourism, coastal development, and ecosystems will face major disruptions. It is projected that over $12.9 billion in infrastructure is at risk from flooding and related damages on O’ahu alone5,6,7.

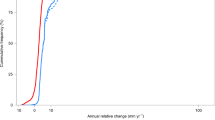
Inset map (a) shows extent of elevation map. GNSS stations indicated by red triangles on map. Time series for GNSS site (HNLC) (b) with long-term average linear trend (red line). Tide gauge location shown as white circle in map (station ID 1612340). c Time series of sea levels since 1905 with yearly moving average (blue line) and long-term average linear trend (red).
Vertical Land Motion (VLM), particularly subsidence, is occurring in many coastal areas globally, including Hawai’i, which can result in drastic increases in relative SLR and the associated impacts8,9. Subsidence can be caused by a wide range of processes including sediment compaction [e.g., refs. 10,11], tectonic motion and earthquakes12,13, volcanic deformation13,14, melting of permafrost15, peat-land degradation16, as well as human activities like extraction of groundwater17,18, production of hydrocarbons19,20, mining21,22 and geothermal activity23,24.
The South Shore of O’ahu is characterized by a complex geological history involving both natural and anthropogenic processes. The majority of the low-lying coastal zone is built on lagoon and reef deposits and alluvium (Fig. S1)25. Much of the urban development and infrastructure, including parts of the industrial Mapunapuna area, is built on highly heterogeneous units that consist of artificial fill. In some areas, the fill can be up to 10 m thick and is composed of a heterogeneous mix of materials such as soil, rocks, trash, organic material, coralline sand, gravel, concrete rubble, and other debris26,27. Fill emplacement has often been haphazard, including hydraulic fill and dumping without compaction, and specific details about the timing and composition is not well documented. There is significant variability in consistency (soft to dense), and grain size (ranging from clay, silt, sand, and gravel to cobbles and boulders). The fill varies in compaction, with some areas being well-compacted and others remaining unconsolidated and loose. Organic material in the fill can decompose, decreasing stability, and compressible materials within the fill can lead to significant settlement. Artificial fill is increasingly observed to be susceptible to compaction and subsidence over time [e.g., refs. 10,11].
Accounting for VLM is crucial for accurately estimating local relative sea level change28. Tide gauges can measure relative sea level change but cannot distinguish between global and local factors29. High-resolution measurements of VLM allow for the global SLR signal to be isolated from relative sea level records at tide gauges, which improves projections of future sea level impacts. VLM at a tide gauge or GNSS station may not capture the true spatial variation in VLM, which can vary widely between sites. Thus, considering VLM may also help explain spatial variations in relative SLR which is necessary for planning effective, site-specific adaptation strategies.
In this paper, we work towards a more complete understanding of the spatio-temporal signature of VLM and its implications for relative sea level change and associated flooding hazards on O’ahu, Hawai’i, Maui, Kauai, Moloka’i, Lanai, and Ni’ihau. Although we have included VLM results for all islands, only O’ahu shows clear coastal subsidence in developed areas, thus it is the primary focus of this paper. have We use 9 years of Sentinel-1 SAR imagery and 4.5 years of ALOS-1 SAR imagery which are decomposed to produce time series of vertical displacement referenced to GNSS. These measurements are then used in combination with a new, high resolution Lidar-derived digital elevation model (DEM) to map areas of future flood exposure along urban O’ahu given a local scenario for future SLR30.
Results
Vertical land motion
InSAR data processing results for the Hawaiian islands display mixed data quality, highly dependent on land cover. More specifically, heavily vegetated areas overwhelmingly result in poor interferometric coherence and unreliable data (Fig. S2). These areas have been masked according to strict statistical thresholds "InSAR data processing". Sentinel-1 data (C-band) is more sensitive to these effects than ALOS-1 (L-band), and thus Sentinel-1 data resulted in fewer reliable pixels in comparison to ALOS-1. The heavily vegetated island of Kauai, in particular, resulted in the least amount of reliable pixels, with almost no reliable pixels along the coastlines. Lanai, in contrast, shows reliable data for the majority of the island except for the forested mountain tops. All the other islands show self-similar patterns of incoherent pixels on the vegetated windward sides of the islands and coherent pixels on the drier leeward sides. Although ALOS-1 outperforms Sentinel-1 with regard to interferometric coherence, Sentinel-1 covers a significantly longer time range with a much higher sampling rate making certain sources of error (e.g., tropospheric delays) less problematic. It is also important to note that the two satellites cover unique time ranges (see section "InSAR data and processing").
Across all islands, the most significant and relevant VLM signals in terms of potential societal impact are located on the south shore of O’ahu due to the extensive coastal engineering activities and development, as well as extensive infrastructure and population that may be vulnerable to flooding. Therefore, the main focus of this paper is on this area. However, VLM results on the other islands processed in this study, can be found in the supporting information document, which include VLM rate maps for each island (Figs. S3–S15).
O’ahu, the most populated island, has a complex range of subsidence signals. Inland, there are subsidence signals present in Sentinel-1 data in agricultural regions, as well as at several land fills. Near the coastlines, there are five areas with subsidence constrained by both Sentinel-1 and ALOS-1 (Figs. 2, S3, and S4). This includes Mapunapuna, Kahauiki, Waipi’o Peninsula, Waiawa, and a small area of Makalapa near Pearl Harbor (locations labeled in Fig. 1). All of these signals are located in areas built on sediments, including coral deposits, alluvium, and artificial fill. The maximum subsidence rates in these areas range from approximately 10-25 mm/yr (Figs. 1 and 2).

Combined time series from ALOS-1 and Sentinel-1 ascending and descending are plotted for the main Mapunapuna area and the Kahauiki area. Boxes on map show group of pixels averaged for each time series plot. Basemap from58.
Flood exposure
In our analysis, we define flood exposure as land with elevations below the 50% annual exceedance probability level (approximately 0.66 m above mean sea level at the Honolulu tide gauge) obtained from National Oceanic and Atmospheric Administration (NOAA) Center for Operational Oceanographic Products and Services (https://tidesandcurrents.noaa.gov/est/stickdiagram.shtml?stnid=1612340) (see methods Section 4.2). This 50% level is 0.28 m above mean higher high water, and will be exceeded in fifty years per century on average (about once every other year). Increases in absolute sea level and/or decreases in elevation can lead to increased flood exposure. We extrapolated the rates from our VLM estimates in order to estimate future flood exposure in decadal increments, given the ‘intermediate’ future SLR scenario from30 (see method details in section "Flood exposure model").
We found that there are already small areas becoming exposed to flooding during average high tide starting this decade along the south shore of O’ahu (Fig. 3). These include undeveloped areas near the shores of Pearl Harbor like wetland environments, parks, and golf courses, as well as undeveloped nearshore islands. It also includes the developed area of Mapunapuna (Fig. 4). Instances of flooding in many of these areas during king tides is well documented (https://www.pacioos.hawaii.edu/king-tides/map.html). However, according to our results, exposed areas will not be widespread in more developed regions until around 2080 when areas such as \({{\rm{Waik}}}{\bar{\i}}{{\rm{k}}}{\bar{\i}}\), downtown Honolulu, the Honolulu International Airport, military sites at Hickam and Pearl Harbor, as well as residential neighborhoods such as Waimalu neighborhood and Ewa Beach area, will become exposed to regular flooding. However, it is important to note that more in depth compound flood models that incorporate the full spectrum of flood-promoting mechanisms, such as groundwater inundation and wave run-up, still need to be included to fully understand the extent and timing of flood exposure in all of these areas [e.g., ref. 4]. For the scope of our analysis, we focus on the impacts specifically of VLM. Mapunapuna, in particular, is a low-lying coastal area that has both high levels of subsidence as well as high amounts of development and infrastructure. This combination makes it particularly vulnerable to the impacts of flooding, and is thus the primary focus of our analysis.


a Future sea levels at location indicated by a black and white circle in (b). Solid rainbow colored lines show the sea level each decade if subsidence is not accounted for. The dashed rainbow colored lines show the sea level each decade if continued subsidence is accounted for (1 cm/yr of subsidence). b Map view colored by the decade when each pixel will be exposed to flooding (see Fig. 3 for spatial extent of map). c The effect of subsidence on the timing of initial flood exposure (the number of years flood exposure is shifted earlier in time if subsidence was not accounted for in the model). See Fig. S27 for uncertainty values for each map. Basemap from ref. 58.
In Mapunapuna, subsidence leads to an increased area of flood exposure each decade relative to the baseline passive flooding (Fig. 5). By the year 2050, under the intermediate scenario, sea level is expected to rise by 0.204 m in Hawai’i (relative to 2020). In Mapunapuna this alone will result in an area of approximately 0.320 ± 0.09 km2 exposed to flooding. If we factor in the effect of continued subsidence, we can expect an exposed area of approximately 0.49 ± 0.11 km2—an increase of approximately 0.17 km2 or 53%. By the end of this century (2100), under the intermediate scenario, the area will expand to 1.85 ± 1.22 km2. The relative effect of subsidence on estimates of flood exposure area (relative to the effect of projected SLR) increases each decade until the end of this century. After the year 2090, the relative effect begins to diminish (blue line in Fig. 5). This is because, after a certain time, the finite amount of rapidly subsiding areas have already become flagged as submerged pixels, so continued subsidence of those pixels has no effect on expanding the flooded area.

The lines show the estimated area without accounting for subsidence (solid black), area accounting for subsidence (dashed black), and the difference between the dashed and solid black lines (solid blue). The lower and upper bounds are shown with gray shading and are based on Monte Carlo simulation using uncertainties for the DEM elevations, VLM rates, and SLR projections (Section "Flood exposure model").
As mentioned, some parts of Mapunapuna are already exposed to flooding or will become exposed by the end of this decade. Subsidence has already played a significant role in this, and will continue to compress the timeline for flood exposure. In other words, subsidence has the effect of pushing the year of first flood exposure earlier. Fig. 4c shows the specific contribution of subsidence in advancing flooding. Many parts of Mapunapuna may experience flooding 20 or 30 years earlier due to subsidence. Kahauiki Village may be exposed to flooding earlier by as much as 50 years or more if subsidence continues at current rates.
Discussion
The analysis of VLM across the Hawaiian Islands using Sentinel-1 and ALOS-1 data reveals a range of data quality and VLM signatures, with significant variations between islands and regions. Our findings provide critical insights into the processes affecting the islands and their impacts on relative SLR and flooding. However, before making interpretations based on the subsidence results, it is important to first understand the limitations of the data, as it is not always clear the degree to which a signal in the InSAR time series is reliable and worthy of being interpreted as real ground deformation. Extensive care has been given to limit noise and mask unreliable data based on statistical metrics (section "InSAR data and processing"). However, this is still an active area of research, and there are often cases where a given signal may pass the masking criteria, but the signal is in fact the result of various noise and errors that originate throughout the long chain of processing steps. Therefore, in order to be conservative in our interpretations, we only discuss signals that are present in all three of our independent datasets. This includes the ALOS-1 (L-band) data as well as both ascending and descending Sentinel-1 (C-band) data. We make the assumption that signals that persist through our strict processing and masking criteria for all three datasets represent real deformation. This is supported by the fact that these datasets consist of independent sensing wavelengths (C-band and L-band), acquisition dates, time ranges, and viewing geometries. It should be emphasized that we are discussing potential impacts to critical infrastructure, businesses, ecosystems, and livelihoods, and thus it is important that we do not rely on any single method or dataset.
This leaves two regions of significant deformation to be interpreted and discussed: the southeast shore of the Island of Hawai’i and the south shore of O’ahu. The Island of Hawai’i is overwhelmingly influenced by the volcanic activities of \({{\rm{K}}}{\bar{\i}}{{\rm{lauea}}}\) and Mauna Loa, exhibiting complex deformation patterns with both subsidence and uplift. Although the complex magmatic system and active recent eruptive history is important to study and understand, these details are beyond the scope of our analysis. Furthermore, the deformation has previously been documented and monitored and there is little to no urban development along these stretches of rocky, volcanic coastline [e.g., refs. 13,31].
The south shore of O’ahu, on the other hand, is highly populated and displays a complex range of subsidence signals in developed areas likely driven by the compaction of unconsolidated sediments.
Although we do not find significant subsidence in the highly developed areas of downtown Honolulu and \({{\rm{Waik}}}{\bar{\i}}{{\rm{k}}}{\bar{\i}}\), subsidence cannot be ruled out here. This is because the majority of pixels in these areas are dominated by large buildings. During the acquisition of data from the satellite, very little energy is received from areas between buildings, which is due to buildings covering a substantial fraction of the land area, and made worse by the relatively low incidence angles of the satellite. These large buildings have foundations anchored below the sediment layers that are susceptible to compaction, thus making them stable. Roads and other areas between buildings may still be subsiding undetected. However, ground-based surveys or much higher resolution InSAR imagery would be required to assess the presence or absence of land subsidence here.
There are a range of possible drivers of subsidence in urban areas [e.g., ref. 32]. Given the spatial scale and geologic setting, we can fairly confidently rule out glacial isostatic adjustment, tectonic, and volcanic activity as the primary drivers of subsidence on O’ahu. Groundwater extraction is commonly cited as the primary driver of subsidence of this scale in many urban areas. However, the aquifer systems in this area are predominantly composed of coarse-grained, highly permeable volcanic materials. This is in contrast to the fine-grained aquitard layers that are generally thought to be the source of long-term sustained groundwater-related compaction [e.g., ref. 17]. This leaves compaction of sediments as the most likely driver of subsidence. This is supported by the fact that many of the areas of observed subsidence coincide with locations of unconsolidated artificial fill.
In natural systems, the compaction of sediment is balanced by continuous sedimentation, maintaining near equilibrium in the long term within the sedimentary basin33. This dynamic process ensures that, while compaction reduces pore spaces and decreases sediment thickness, ongoing deposition of new sediments compensates for these changes, sustaining the overall sedimentary structure. Compaction occurs rapidly initially due to the expulsion of pore water and rearrangement of grains under overburden pressure. Over longer timescales, typically thousands of years, the rate of compaction decreases and approaches a quasi-steady state as sediments become more lithified34,35. However, over the time scale of decades, compaction is assumed to be relatively constant.
In urbanized areas, including O’ahu, sedimentation rates have been disrupted by urbanization [e.g., ref. 36]. In the case of artificial fill, the rate of compaction is expected to decay substantially over the course of decades. However, we observe no decay in subsidence rates spanning our observation period of more than 17 years. This may imply there is continued compaction of sediments underlying the fill, or that there is a different mechanism driving sustained subsidence that has not been accounted for such as changes in the the groundwater system over time. Similar studies have also observed relatively constant subsidence rates over long time periods associated with coastal sediments and artificial fill [e.g., refs. 37,38]. In the five areas we highlight on the south shore (Table 1), subsidence rates for Sentinel-1 (more recent) are within the uncertainty bounds of rates for ALOS-1 with the exception of Kahauiki. In this case subsidence rates have increased substantially from 12 ± 4.9 mm/yr to 26 ± 25.2 mm/yr. This may be a result of additional fill emplaced after the time range of ALOS-1 for the development of the supportive housing community (Kahauiki Village) which broke ground in 201739.
In this study, we assume a constant, linear future rate of subsidence based on the observed consistency and linearity in ALOS-1 and Sentinel-1 datasets over the past 20-year period. This is an informed assumption, reflecting the general trends observed in recent history. However, it is important to acknowledge that this assumption may not fully capture the complexities of future subsidence dynamics. Subsidence rates can be influenced by a wide range of factors. For example, assuming compaction of unconsolidated fill is the main driver of subsidence, we might expect a gradual decrease in the subsidence rate over time. This decay is not found in our observations, which may imply the decay constant for this process is long enough to be approximated with a linear trend at least in the coming decades. This uncertainty highlights the need for continued monitoring of subsidence in urban areas to continuously refine our understanding of future subsidence rates and future flood exposure.
We emphasize that our analysis is based on the established and widely used NOAA SLR scenarios, and although we utilized the ‘intermediate’ scenario, it represents one plausible scenario out of a wide range of possibilities. The time-line and extent of flood exposure is sensitive to the future SLR scenario used in the analysis. And the relative impact of subsidence has an inverse sensitivity to changes in SLR projections (i.e., lower future levels of SLR would result in subsidence having a greater relative impact, and vice versa). Adding to this, there is uncertainty in both the DEM used as the baseline for elevations, as well as uncertainty in current and future estimates of VLM. Our analysis has taken these uncertainties into account and uses state-of-the-art data processing methodology and model outputs, but these are continually being refined and updated by the scientific community with improved techniques and more data, necessitating periodic reassessments to revise planning and adaptation strategies.
We have shown through our modeling and observations that subsidence both accelerates the time line of flood exposure and expands the spatial extent of flood exposure over time. We also showed we can expect the relative contribution of subsidence to stabilize, or decrease, after a certain time (Fig. 5, Section "Flood exposure"). This is due to the fact that as SLR continues to accelerate in the Pacific, it becomes increasingly the dominant driver of relative SLR (Fig. 5). This occurs as a greater fraction of the areas that are already known to be subsiding will have already become submerged, so continued subsidence will have no further impact on flood exposure. In Mapunapuna, for example, the relative effect of subsidence on the area of flood exposure begins to diminish after the year 2090.
Our study highlights the need for subsidence to be considered when assessing the impacts of rising sea level, and adaptation strategies must account for both SLR and land subsidence together. For future work, these results can be further combined with analysis of other processes that are known to exacerbate flood exposure for a more complete estimate of future flood exposure. This includes wave run-up, storm drain back-flow, groundwater inundation, coastal erosion/shoreline retreat, increasing tidal range, and storm-related flooding. The combined effects of any number of these types of processes (compound flooding) can lead to much greater flood exposure.
Methods
InSAR data and processing
Sentinel-1 and ALOS-1 SAR imagery was processed with the InSAR Scientific Computing Environment (ISCE)40 along with the stack processing capability41 to produce ascending and descending stacks of full-resolution co-registered C-band single look complex images (see Table 2 for details) (Fig. S16). Topographic effects were removed using the Global and European Digital Elevation Model (CopDEM GLO-30—https://doi.org/10.5270/ESA-c5d3d65).
L-band data (ALOS-1) offers generally higher coherence, but is limited by its lower temporal sampling when compared with C-band (Sentinel-1). O’ahu has a mix of land cover types ranging from coherent urban areas, to decorrelated forests, wetlands, and farmlands. To address the variable land cover types and maximize coherence, we used the method known as ‘phase linking’, which takes into account all possible interferometric pairs42. Variations and modifications have been introduced to this category of InSAR time series processing in recent years43,44,45. For our study we employed the Eigendecomposition-based Maximum-likelihood-estimator of Interferometric phase (EMI) method45 coupled with the sequential estimator method44, which is designed for maximum computational efficiency for processing of long time series. This method identifies pixels as either a persistent scatter or distributed scatterers from full resolution stacks of SAR imagery based on statistics of neighborhoods of complex numbers. Statistically similar pixels are grouped together and dimensionality is reduced from all possible interferometric combinations to a single value for each pixel in each acquisition. This approach is designed to decrease the estimation bias in the presence of phase inconsistencies. The exploitation of all interferograms (even those with low coherence) can improve the signal-to-noise ratio (SNR) in phase estimation. We leveraged Fine Resolution InSAR using Generalized Eigenvectors (FRInGE)46 to construct a stack of full resolution interferograms. These were down-looked four times in range direction to make phase unwrapping more computationally feasible. We performed phase unwrapping with Statistical-cost Network-flow Algorithm for Phase Unwrapping47 and formed time series and velocities using the Miami InSAR Time-series software in Python (MintPy)48. ECMWF climate Reanalysis v5 (ERA5) was used to remove long wavelength tropospheric delays49. For ALOS-1 data, which has too few observations within the time series to average out tropospheric delays, additional phase-elevation correlations were removed using a simple linear relationship.
For the final VLM rates, we used a strict masking threshold based on six criteria. This includes spatial coherence (> 0.8), temporal coherence (> 0.8), non-zero phase closure (< 5%), water (binary), shadows (binary), velocity misfit (< 1 mm/yr). Each of these criteria must be satisfied in order to remain in the analysis (Figs. S17–S23).
Due to the single-dimensionality of InSAR from a single satellite, it is difficult to resolve displacements in standard east-north-up coordinates. Furthermore, given the sub north-south flight directions of both ascending and descending paths from Sentinel-1, there is far less resolution in the N-S direction than in the vertical or E-W direction. With multiple flight paths which provide unique viewing geometries, we were able to decompose line-of-sight data to approximate displacements in east-west and vertical directions50. We found negligible horizontal displacements in coastal O’ahu, thus we make the assumption that this is also the case for ALOS-1 data where we did not have sufficient descending data available to perform the decomposition. LOS rates were simply projected to the vertical dimension in the case of ALOS-1, as well as in small gaps in Sentinel-1 in Ni’ihau, Maui and Moloka’i.
We used vertical displacements measured by continuous GNSS sites as a baseline to reference InSAR time series (Fig. S24). This serves as an estimate of any broad-scale deformation which is likely driven by volcanic loading and associated lithospheric flexure. The criteria for site selection is that it is relatively near the coasts, has a stable monument (i.e., preferably anchored in bedrock), has a time series longer than three years, no major gaps, and is away from local deformation sources such as the compacting sediments on O’ahu or the volcanic deformation on Hawai’i). GNSS velocities were obtained from the Nevada Geodetic Laboratory through the University of Nevada Reno51. Rates were computed using the Median Interannual Difference Adjusted for Skewness algorithm method52. Compared to traditional least squares methods, this algorithm has demonstrated greater robustness against common noise patterns, including step discontinuities, outliers, seasonality, skewness, and heteroscedasticity. Additionally, it gives more realistic uncertainties when compared with formal uncertainties from a least squares linear model. For each island, all high quality sites were used in a weighted average or spatial interpolation where there were sufficient stations. For example, on O’ahu, stations ZHN1 (−0.60 mm/yr) and HNLC (−0.48 mm/yr) were averaged for a reference value of −0.59 ± 0.57 mm/yr for the island. For the Island of Hawai’i, because there are more available GNSS stations, we were able to interpolate the long-term average velocities to form an image sampled to the resolution of the InSAR (Fig. S25). This image was subtracted from the VLM rates for referencing. For Maui, only one reliable site (MAUI) exists which has a rate of −1.06 mm/yr. No reliable GNSS time series exist for Moloka’i or Lanai, thus an average of the reference values for O’ahu and Maui was used (−0.8 mm/yr). No GNSS exist on Ni’ihau, thus an average of the three sites from Kauai were used (−1.3 mm/yr). The GNSS uncertainties were propagated to the uncertainty of the InSAR VLM uncertainty.
Digital elevation model (DEM)
Hawai’i is an area where dense vegetation poses challenges for field teams, aerial LiDAR collection, and elevation data processing. Existing elevation datasets contained misclassified vegetation and interpolated high points in streams, canals and large basins. This resulted in disconnections between hydrologically linked pathways and mischaracterization of where and when flooding may occur. In the context of modeling VLM, these errors are an additional source of uncertainty that affects potential confidence in the results. While the source data do have accuracy statistics published with them, they often poorly characterize confidence in the data even a short distance from the sampled locations. The DEM developed for this study represents a large step forward for modeling the impacts of SLR on O’ahu, and similar techniques are being used to refine and correct elevation models for each of the other Hawaiian Islands.
The DEM (Fig. 1) is a mosaic of multiple data sources to characterize the coastal area around O’ahu for the purposes of wave modeling and coastal flooding research. The final resolution is 2 m. Data from NOAA53, USGS54, USACE55, and UH SOEST were mosaicked, edited, and vertically or horizontally shifted to fill data gaps/holidays to create a seamless integrated coastal dataset around the island. Emphasis was placed on continuous coastal plain and nearshore elevations. Upland (> 10 m elevation) were secondarily considered. Due to data coverage holidays, LiDAR point misclassifications, and interpolation artifacts, many water bodies and coastal streams were poorly represented. Low-lying streams and water bodies were hydro-enforced to assure that streams sloped toward the ocean.
We ordered layers based on confidence and resolution. USACE 2013 data were used for nearshore from −30 meters to 2.5 meter elevation where coverage existed. NOAA 2013 terrain data were used from 0.5 meters and higher terrain where coverage existed. We filled several survey data gaps in 2013 USACE and NOAA LiDAR in Ko’olau Poko and Ko’olau Loa on O’ahu with 2007 USACE LiDAR that was reprocessed to better characterize bare-earth and loko i’a (Hawaiian fishponds).
Waterways, harbors and inlets were identified and depths checked to assure approximate agreement with existing data sources (2013 USACE LiDAR data and NOAA nautical charts—if data were missing or disagreement in overlapping data). Data gaps were filled using interpolation and down-sampling if other elevation or depth data could not be found. Across the dataset, gulches and canals under 10 meter elevation were reviewed for down-slope flow and connectivity to the ocean and in some cases, subsurface culverts and streams were ‘carved’ into the DEM to represent flood pathways otherwise missed due to data format. In many cases, bridges and misclassified vegetation were removed and artificially high areas (caused by mis-classification of vegetation in canals and streams) were lowered using either polygons and single values to replace sections or using a calculated slope value between ‘upstream’ and ‘downstream’ elevations considered valid. Across the DEM, building footprints located below the 20 meter elevation contour were reviewed. In some cases, artificially low or high values existed with the building footprints as a result of LiDAR data misclassifications and interpolation. Minimum mean elevations of surrounding terrain were applied as ‘foundation’ elevations to ‘flatten’ footprint areas. The minimum mean elevation was defined as the mean of the ‘ground’ within the 2D footprint space.
The DEM is referenced to Mean Sea Level (MSL) from 2011. We re-referenced the DEM to MSL in 2020 by assuming a constant rate of 1.54 mm/yr based on the historical tide gauge measurements (Fig. 1). The 50% annual exceedance probability level (0.66 m) is subtracted from the DEM so that flood exposure is relative to to that level. For future elevation projections we linearly extrapolate our VLM measurements to create future DEMs.
Flood exposure model
Our flood exposure model is based on ‘intermediate’ future sea level scenario from ref. 30 (Fig. S26). As these models already include a rough estimate of VLM, we removed that component from the future sea level projections prior to our analysis. We linearly extrapolate the Sentinel-1 VLM rates into the future to update the DEM in 10-year increments and evaluate areas below zero elevation based on future sea level projections. Both the DEM and VLM images are resampled to 10 m pixel size. To assess the temporal dynamics of submersion for each pixel or spatial coordinate (x, y), we employ a discrete time analysis approach. We define E(t) as the elevation at time t for the given pixel, and S(t) as the corresponding sea level at time t. Both E(t) and S(t) are functions that represent the discrete time series data for elevation and sea level, respectively.
The analysis iterates through time vector T = {t1, t2, . . . , tn}, where each ti corresponds to a discrete time point (e.g., a decade). For each time point, we compute a binary submersion indicator Fx,y(ti) as follows:
The value of Fx,y(ti) denotes whether the elevation at pixel (x, y) is submerged below sea level at time ti. A cumulative submersion score Cx,y for each pixel is calculated by summing the binary indicators over the time vector T:
The cumulative submersion score Cx,y thus represents the count of discrete time points for which the pixel’s elevation is below the sea level. If Cx,y is non-zero, it indicates that the pixel will be submerged on average once every other year beginning within the time period under consideration. The first year of submersion is determined by identifying the smallest ti for which Fx, y(ti) = 1. This discrete time method allows us to map the spatial distribution of submersion events and constrain the initial occurrence of submersion within the dataset’s temporal resolution.
We also quantify the specific contribution of subsidence on flood exposure. This is calculated by subtracting output from a model that allows elevation, E(ti), to vary in time based on the extrapolated rates of subsidence from output from a model that assumes a constant value for elevation (i.e., E = E(t = 2020)).
In addition to assessing the temporal dynamics of submersion for each pixel, we quantified the total submerged area for each time step within the Mapunapuna area (see extent outline in Fig. 3). For each time step, we counted the number of pixels marked as submerged and converted this count into a total area.
To quantify the uncertainty in the cumulative submersion score C as well as the area of flood exposure, we used a Monte Carlo simulation approach, which accounts for the uncertainties in SLR projections, DEM, and VLM. We perform multiple iterations (1000 simulations) of the calculations of the submersion scores and area, incorporating random variations within the specified uncertainty bounds for each input variable. For each iteration, we randomly sample from normal distributions centered on the mean values of SLR, DEM, and VLM rates, with standard deviations derived from their respective uncertainties. Specifically, SLR is sampled from a normal distribution defined by the mean and standard deviation calculated from the 17th and 83rd percentiles of the projections. The DEM uncertainty is included by sampling from a normal distribution with a standard deviation reflecting the reported DEM uncertainty. The VLM uncertainty is incorporated by sampling from a normal distribution based on the rate standard deviations at each pixel. By running these simulations, we generate a distribution of possible cumulative submersion scores C and areas. From this distribution, we compute the 2.5 percentile as the upper bound and the 97.5 percentile as the lower bound, providing a 95% confidence interval for the submersion score. This Monte Carlo-based approach allows us to capture the range of potential outcomes due to the combined uncertainties in the input data.
Data availability
All SAR data used in this study are free and publicly available for download through the Alaska Satellite Facility (ASF) at https://asf.alaska.edu/. GNSS data are free and publicly available through the Nevada Geodetic Laboratory (NGL) at http://geodesy.unr.edu/. The ALOS-1 and Sentinel-1 rate maps (estimated using the freely available SAR data) that were presented and used in flood exposure model for O’ahu are included with this manuscript as supplemental datasets (Supplementary Data 1–2). All other vertical land motion rates for Sentinel-1 and ALOS-1 are publicly available on Zenodo with https://doi.org/10.5281/zenodo.1479708756. The DEM generated and used in this study is publicly available on Zenodo with https://doi.org/10.5281/zenodo.1472818457.
Code availability
The code used in this study can be accessed through https://github.com/kylemurray2/SARTS.
References
Habel, S., Fletcher, C. H., Anderson, T. R. & Thompson, P. R. Sea-level rise induced multi-mechanism flooding and contribution to urban infrastructure failure. Sci. Rep. 10, 3796 (2020).
Thompson, P. R., Widlansky, M. J., Merrifield, M. A., Becker, J. M. & Marra, J. J. A statistical model for frequency of coastal flooding in honolulu, hawaii, during the 21st century. J. Geophys. Res.: Oceans 124, 2787–2802 (2019).
McKenzie, T., Habel, S. & Dulai, H. Sea-level rise drives wastewater leakage to coastal waters and storm drains. Limnol. Oceanogr. Lett. 6, 154–163 (2021).
Anderson, T. R. et al. Modeling multiple sea level rise stresses reveals up to twice the land at risk compared to strictly passive flooding methods. Sci. Rep. 8, 14484 (2018).
Hawaii Climate Change Mitigation and Adaptation Commission. Hawaii sea level rise vulnerability and adaptation report. Prepared by Tetra Tech, Inc. (2017).
Bremer, L. L., Coffman, M., Summers, A., Kelley, L. C. & Kinney, W. Managing for diverse coastal uses and values under sea level rise: perspectives from oahu, hawaii. Ocean Coast. Manag. 225, 106151 (2022).
Romine, B. M. & Fletcher, C. H. A summary of historical shoreline changes on beaches of kauai, oahu, and maui, hawaii. J. Coast. Res. 29, 605–614 (2013).
Hammond, W. C., Blewitt, G., Kreemer, C. & Nerem, R. S. GPS imaging of global vertical land motion for studies of sea level rise. J. Geophys. Res.: Solid Earth 126, e2021JB022355 (2021).
Tay, C. et al. Sea-level rise from land subsidence in major coastal cities. Nat. Sustain. 5, 1049–1057 (2022).
Buzzanga, B. et al. Localized uplift, widespread subsidence, and implications for sea level rise in the New York City metropolitan area. Sci. Adv. 9, eadi8259 (2023).
Zoccarato, C., Minderhoud, P. S. & Teatini, P. The role of sedimentation and natural compaction in a prograding delta: insights from the mega mekong delta, vietnam. Sci. Rep. 8, 11437 (2018).
Naish, T. et al. The significance of interseismic vertical land movement at convergent plate boundaries in probabilistic sea‐level projections for AR6 scenarios: The New Zealand case. Earth’s Future, 12, e2023EF004165 (2024).
Kundu, B. et al. Triggering relationships between magmatic and faulting processes in the may 2018 eruptive sequence at \({{\rm{K}}}{\bar{\i}}{{\rm{lauea}}}\) volcano, hawaii. Geophys. J. Int. 222, 461–473 (2020).
Poland, M., Hamburger, M. & Newman, A. The changing shapes of active volcanoes: history, evolution, and future challenges for volcano geodesy. J. Volcanol. Geotherm. Res. 150, 1–13 (2006).
Chen, R. H. et al. Permafrost dynamics observatory (pdo): 2. joint retrieval of permafrost active layer thickness and soil moisture from l-band insar and p-band polsar. Earth Space Sci. 10, e2022EA002453 (2023).
Umarhadi, D. A. et al. Tropical peat subsidence rates are related to decadal LULC changes: insights from InSAR analysis. Sci. Total Environ. 816, 151561 (2022).
Murray, K. D. & Lohman, R. B. Short-lived pause in Central California subsidence after heavy winter precipitation of 2017. Sci. Adv. 4, eaar8144 (2018).
Wu, P.-C., Wei, M. & D’Hondt, S. Subsidence in coastal cities throughout the world observed by InSAR. Geophys. Res. Lett. 49, e2022GL098477 (2022).
Staniewicz, S. et al. Insar reveals complex surface deformation patterns over an 80,000 km2 oil-producing region in the permian basin. Geophys. Res. Lett. 47, e2020GL090151 (2020).
Qu, F., Lu, Z., Kim, J. & Turco, M. J. Mapping and characterizing land deformation during 2007-2011 over the Gulf Coast by L-band InSAR. Remote Sens. Environ. 284, 113342 (2023).
Dang, V. K. et al. Land subsidence induced by underground coal mining at quang ninh, vietnam: persistent scatterer interferometric synthetic aperture radar observation using sentinel-1 data. Int. J. Remote Sens. 42, 3563–3582 (2021).
Wang, H., Li, K., Zhang, J., Hong, L. & Chi, H. Monitoring and analysis of ground surface settlement in mining clusters by sbas-insar technology. Sensors 22, 3711 (2022).
Jiang, J. & Lohman, R. B. Coherence-guided InSAR deformation analysis in the presence of ongoing land surface changes in the Imperial Valley, California. Remote Sens. Environ. 253, 112160 (2021).
Lillo, D. L. et al. Documenting surface deformation at the first geothermal power plant in south america (cerro pabellón, chile) by satellite insar time-series. J. Volcanol. Geotherm. Res. 441, 107869 (2023).
Sherrod, D. R., Sinton, J. M., Watkins, S. E. & Brunt, K. M. Geologic Map of the State Of Hawaii (Tech. Rep., US Geological Survey, 2021).
Munro, K. The Subsurface Geology of Pearl Harbor with Engineering Application (University of Hawai’i at Manoa, 1981).
Finstick, S. A. Subsurface Geology and Hydrogeology of Downtown Honolulu with Engineering and Environmental Implications (University of Hawai’i at Manoa, 1996).
Wöppelmann, G. & Marcos, M. Vertical land motion as a key to understanding sea level change and variability. Rev. Geophysics 54, 64–92 (2016).
Adebisi, N., Balogun, A.-L., Min, T. H. & Tella, A. Advances in estimating sea level rise: a review of tide gauge, satellite altimetry and spatial data science approaches. Ocean Coast. Manag. 208, 105632 (2021).
Sweet, W. V. et al. Global and regional sea level rise scenarios for the United States (No. CO-OPS 083) (2017).
Owen, S. et al. Rapid deformation of kilauea volcano: global positioning system measurements between 1990 and 1996. J. Geophys. Res.: Solid Earth 105, 18983–18998 (2000).
Shirzaei, M. et al. Measuring, modelling and projecting coastal land subsidence. Nat. Rev. Earth Environ. 2, 40–58 (2021).
Roberts, H. H., Bailey, A. & Kuecher, G. J. Subsidence in the Mississippi River Delta—Important influences of valley filling by cyclic deposition, primary consolidation phenomena, and early diagenesis. Gulf Coast Association of Geological Societies Transactions 44, 619–629 (1994).
Bryant, W. R., Hottman, W. & Trabant, P. Permeability of unconsolidated and consolidated marine sediments, gulf of mexico. Mar. Georesources Geotechnol. 1, 1–14 (1975).
Kooi, H. & De Vries, J. Land subsidence and hydrodynamic compaction of sedimentary basins. Hydrol. Earth Syst. Sci. 2, 159–171 (1998).
Wolanski, E., Martinez, J. A. & Richmond, R. H. Quantifying the impact of watershed urbanization on a coral reef: maunalua bay, hawaii. Estuar., Coast. Shelf Sci. 84, 259–268 (2009).
Finnegan, N. J., Pritchard, M. E., Lohman, R. B. & Lundgren, P. R. Constraints on surface deformation in the Seattle, WA, urban corridor from satellite radar interferometry time-series analysis. Geophys. J. Int. 174, 29–41 (2008).
Shirzaei, M. & Bürgmann, R. Global climate change and local land subsidence exacerbate inundation risk to the San Francisco Bay Area. Sci. Adv. 4, eaap9234 (2018).
Honolulu Star-Advertiser. Project to house 600 homeless breaks ground near Sand Island. Honolulu Star-Advertiser (2017). https://www.staradvertiser.com/2017/07/12/hawaii-news/project-to-house-600-homeless-breaksground-near-sand-island/.
Rosen, P. A., Gurrola, E., Sacco, G. F. & Zebker, H. The InSAR scientific computing environment. In EUSAR 2012; 9th European conference on synthetic aperture radar. 730–733 (VDE, 2012).
Fattahi, H., Agram, P. & Simons, M. A network-based enhanced spectral diversity approach for TOPS time-series analysis. IEEE Trans. Geosci. Remote Sens. 55, 777–786 (2016).
Guarnieri, A. M. & Tebaldini, S. On the exploitation of target statistics for SAR interferometry applications. IEEE Trans. Geosci. Remote Sens. 46, 3436–3443 (2008).
Ferretti, A. et al. A new algorithm for processing interferometric data-stacks: squeeSAR. IEEE Trans. Geosci. Remote Sens. 49, 3460–3470 (2011).
Ansari, H., De Zan, F. & Bamler, R. Sequential estimator: toward efficient InSAR time series analysis. IEEE Trans. Geosci. Remote Sens. 55, 5637–5652 (2017).
Ansari, H., De Zan, F. & Bamler, R. Efficient phase estimation for interferogram stacks. IEEE Trans. Geosci. Remote Sens. 56, 4109–4125 (2018).
Fattahi, H., Agram, P. S., Tymofyeyeva, E. & Bekaert, D. P. Fringe; full-resolution insar timeseries using generalized eigenvectors. AGU Fall Meet. Abstr. 2019, G11B–0514 (2019).
Chen, C. W. & Zebker, H. A. Phase unwrapping for large SAR interferograms: statistical segmentation and generalized network models. IEEE Trans. Geosci. Remote Sens. 40, 1709–1719 (2002).
Yunjun, Z., Fattahi, H. & Amelung, F. Small baseline InSAR time series analysis: unwrapping error correction and noise reduction. Comput. Geosci. 133, 104331 (2019).
Murray, K. D., Bekaert, D. P. S. & Lohman, R. B. Tropospheric corrections for InSAR: statistical assessments and applications to the Central United States and Mexico. Remote Sens. Environ. 232, 111326 (2019).
Brouwer, W. S. & Hanssen, R. F. A treatise on InSAR geometry and 3D displacement estimation. IEEE Trans. Geosci. Remote. Sens. 61, 5217811 (2023).
Blewitt, G., Hammond, W. & Kreemer, C. Harnessing the GPS data explosion for interdisciplinary science. Eos 99, e2020943118 (2018).
Blewitt, G., Kreemer, C., Hammond, W. C. & Gazeaux, J. MIDAS robust trend estimator for accurate GPS station velocities without step detection. J. Geophys. Res.: Solid Earth 121, 2054–2068 (2016).
National Oceanic and Atmospheric Administration (NOAA). Digital Elevation Model (DEM) (Tech. Rep., NOAA National Centers for Environmental Information (NCEI), 2013).
United States Geological Survey (USGS). USGS 3D Elevation Program (3DEP) Digital Elevation Model (United States Geological Survey (USGS), 2013).
United States Army Corps of Engineers (USACE). Digital Elevation Model (DEM) (Tech. Rep., U.S. Army Corps of Engineers, 2013).
Murray, K. Rates of vertical land motion in Hawaiʻi (Version 1) [Data set]. Zenodo. https://doi.org/10.5281/zenodo.14797087 (2025).
Barbee, M. NOAA Office for Coastal Management, U.S. Army Corps of Engineers (USACE) Joint Airborne Lidar Bathymetry Technical Center of Expertise (JALBTCX), U.S. Geological Survey, School of Ocean and Earth Science and Technology, University of Hawai'i at Manoa, & NOAA National Centers for Environmental Information. Oahu hydro enforced digital elevation model 2m v1.0 (Version 1) [Data set]. Zenodo. https://doi.org/10.5281/zenodo.14728184 (2025).
Esri, HERE, Garmin, and the GIS User Community. World light gray base [basemap]. Available from ArcGIS Online (2024).
Acknowledgements
Funding from ONR grant number N00014-23-1-2015 to the Climate Resilience Collaborative (CRC https://www.soest.hawaii.edu/crc/) at the University of Hawai’i at Mānoa. We thank Eric Lindsey, Patrick Barnard, and the other, anonymous, reviewer for their constructive comments and valuable feedback, which greatly improved the quality of this manuscript.
Author information
Authors and Affiliations
Contributions
K.M., C.F., and P.T conceived the project. K.M. conducted the data processing, analysis, modeling, constructed the figures and wrote the manuscript. M.B. constructed the DEM and wrote the Lidar/DEM methods section. All authors reviewed the manuscript.
Corresponding author
Ethics declarations
Competing interests
The authors declare no competing interests.
Peer review
Peer review information
Communications Earth & Environment thanks Eric Lindsey, Patrick Barnard and the other, anonymous, reviewer(s) for their contribution to the peer review of this work. Primary Handling Editors: Nicole Khan and Alireza Bahadori. A peer review file is available.
Additional information
Publisher’s note Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution-NonCommercial-NoDerivatives 4.0 International License, which permits any non-commercial use, sharing, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if you modified the licensed material. You do not have permission under this licence to share adapted material derived from this article or parts of it. The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by-nc-nd/4.0/.
About this article

Cite this article
Murray, K., Barbee, M., Thompson, P. et al. Coastal land subsidence accelerates timelines for future flood exposure in Hawai'i. Commun Earth Environ 6, 123 (2025). https://doi.org/10.1038/s43247-025-02108-4
Received:
Accepted:
Published:
DOI: https://doi.org/10.1038/s43247-025-02108-4
This article is cited by
-
Flood inundation amplified by large-scale ground subsidence funnel under the ongoing global climate change
Communications Earth & Environment (2025)
