
Abstract
As global mandates drive emission reductions, public transport systems are adopting electric buses, requiring adjustments to vehicle and crew schedules due to limited range. Our study evaluates the impact of full electrification on the total cost of ownership and the number of vehicles and drivers required across twenty representative transport networks in Germany. The results show an average cost increase of 12% and a 13% increase in the number of vehicles across all electric bus concepts evaluated. Additionally, paid driver time saw a modest increase of 2%, which resulted in less favorable distribution across duties, leading to a 6% rise in the number of duties. High charging powers provided more operational benefits than increases in battery capacity. The study suggests that while electrification incurs additional costs and organizational challenges, these are manageable with appropriate vehicle and crew schedule adjustments, supporting the technical and economic feasibility of transitioning to electric buses.
Similar content being viewed by others

Introduction
Driven by current political mandates to reduce emissions1,2, public transport operators are electrifying their fleets from conventional to battery electric buses3. However, the limited range of electric buses requires adjustments to vehicle schedules4,5. Ultimately, these adjustments affect the total cost of ownership (TCO) of different electric bus systems and technologies, including driver wages and demand6,7,8,9,10.
Changes in the cost and demand for vehicles and drivers have a significant impact on transport operators. Increased demand for vehicles increases the need for depot space, which can lead to construction. Increased demand for drivers is a major challenge, as recruiting adequate drivers is an ongoing challenge for many operators11,12. Therefore, this study aims to examine the operational and cost implications of fleet electrification by addressing the following research questions:
-
1.
How do the specific conditions of a public transport network affect the costs of electrification?
-
2.
How does electrification affect the demand for drivers and buses for public transport?
-
3.
What challenges does public transport electrification pose for vehicle and crew scheduling?
To date, many publications have focused on the TCO associated with a variety of electric bus projects and technology implementations worldwide5,13,14,15,16,17,18. However, as not only costs but also other operational parameters change, multi-criteria decision making methods have also been used to compare different technologies and concepts19,20. For example, concepts with different greenhouse gas reduction potentials can be compared21. In particular, the consideration of different criteria allows for the balancing of the different interests of transport operators, passengers, and governments20.
Previous studies suggest that in addition to the energy limitations of vehicles7,22, crew scheduling constraints can significantly influence the costs and operational parameters associated with different electric bus models and should be integrated into the local context8. However, because these interactions have only been studied for specific bus routes, a comprehensive, generalized evaluation is still lacking. A comprehensive analysis of the impact of electrification on vehicle and driver demand and deployment has not yet been conducted.
There is also a gap in research on the characteristics of a bus network that facilitate or hinder electrification. In particular, there are differences between urban and rural areas and between large and small operators. In practice, large cities have been observed to switch earlier, but there is no scientific evidence on whether the structure of bus networks has a significant impact on this. The question of which types of bus networks are particularly suitable for electrification is relevant because new mobility services and driverless vehicles influence the possibilities for efficient network design23,24.
A well-founded consideration of the effects of electrification of the bus fleet on vehicle and crew scheduling has been scarce in the literature. In particular, the effects have not been considered systematically for entire networks. To address these research gaps, the electrification of 20 transport operators’ route networks was analyzed using publicly available general transit feed specification (GTFS) data. The twenty networks were selected specifically to include networks of different sizes and for both urban and rural areas. The analysis involved generating vehicle and crew schedules for diesel and electric bus concepts using an adaptive large neighborhood search (ALNS) heuristic. TCO, vehicle, and driver demand, including number of vehicles, duties, and working hours, were then calculated. This allowed a qualified assessment of the impact on costs and other operational parameters. The charging demand determined from the vehicle schedules can be used as a database for future work to determine the potential for charging and load optimization.
Methods
To thoroughly examine the impact of network electrification, twenty transport operators were selected based on GTFS data. The electric vehicle and crew scheduling problem (E-VCSP) framework was employed to create feasible schedules considering different electric bus concepts and crew constraints, using an ALNS heuristic. The TCO for these schedules was determined using the present value method. Figure 1 shows the described workflow.

The chosen approach assesses the impact of public transport electrification based on twenty representative networks, determining costs, vehicle and crew requirements, as well as other operational indicators for seven electric bus concepts.
Selection of transport operators
The study aims to assess the costs and personnel requirements of transitioning to electric buses across entire networks. A broad database of various transport operators who publish their schedules as GTFS was used to ensure comprehensive and reliable results. Two databases for GTFS data were used as a basis. DELFI25 collects, cleanses, and standardizes current GTFS data from transport companies in Germany. The mobility database26 contains an extensive list of GTFS feeds worldwide. The list is updated regularly and constantly growing. However, the data records that are received when the feeds are called up are not standardized. Despite these databases’ extensive coverage, GTFS data often lacks specifics on blocks, vehicle capacity, and trip distances, excluding non-revenue trips. This research addressed data gaps by estimating missing trip distances by air distance (with factor 1.1) and focusing on the day with the highest number of regular service trips per operator for analysis.
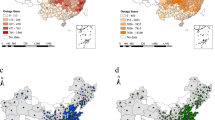
Figure 2 shows a classification of the transport networks. In daily operations, mileage serves as a metric indicative of both the network’s expanse and the fleet magnitude of a transport operator. The distribution of this size is notably broad, with most transport operators registering daily mileage ranging from 1000 to 10,000 km. This range is generally representative of a fleet comprising 5 to 50 buses. The average speed of scheduled services gives an indication of whether the service area is mainly urban or rural. The average speed in Germany is slightly lower than in other parts of the world and more evenly distributed, which may be because Germany is relatively evenly populated and the differences between urban and rural areas are less pronounced. Adjustments to transportation services occur during the day because typical ridership varies by time of day. Transport operators can adapt their timetable to the typical ridership to varying degrees. The fluctuations of the transport offer were assessed based on the parallel trips \({PT}(t)\) in the regular service according to formula (1):

a Distribution of the daily service mileage of the transport networks of the two sources DELFI and mobility database. The x-axis is logarithmically scaled. b Distribution of the average speed of the transport networks of the two sources DELFI and mobility database. c Distribution of the average speed of uniformity of the timetable of the two sources DELFI and mobility database.
To address the research inquiries with the broadest applicability, twenty transport operators were chosen from the DELFI database to ensure a comprehensive and representative portrayal of transport operators (Table 1). The exclusive reliance on the DELFI database was due to its database being pre-curated, standardized, and processed. Since the GTFS data does not include deadhead trips, including inbound and outbound trips, the number and location of depots were determined through independent research. The distance and time of these deadhead trips were estimated using geocoordinates and routing mechanisms.
The selection of twenty networks was guided by key metrics, specifically mileage, speed, and uniformity of timetable, with the aim of maximizing diversity among the chosen networks. Previous analyses have shown that the differences between German and international transport companies are minimal, ensuring that the selection provides a good overall representation. Mileage serves as a reliable proxy for fleet size. Speed provides insights into the level of urbanization of a network, as average speeds tend to be significantly lower in urban centers. Uniformity of Timetable reflects the degree to which operators align service frequency with ridership. This metric can be influenced by various factors, including the planning strategy of the network operator, the proportion of commuter traffic, and the availability of alternative transport options, such as tram systems.
Investigated bus concepts
The GTFS data does not contain any information on the vehicle capacity of the buses. For this study, it was therefore assumed that the entire scheduled service of all operators is provided exclusively by articulated buses. To be able to investigate the effects of electric buses, five electric bus concepts with depot charging were examined and compared with the diesel reference. The focus is on depot charging, as the energy restrictions are particularly clear for this electric bus concept.
Table 2 shows the technical parameters of the different electric bus concepts and the reference diesel bus (DB). For the electric buses studied, the focus is on varying the energy constraints imposed by the technical configuration. This is done by varying the usable battery capacity, charging power, and energy consumption. In this respect, EB-3 represents a typical electric bus available on the market today. By varying the various technical parameters, the results of the route and service planning can be used to identify the operational advantages resulting from higher battery capacity, charging power, and lower energy consumption.
The electric bus concepts differ in terms of usable battery capacity. In addition to the installed battery capacity, the effective usable battery capacity is influenced by the aging state of the battery and the desired depth of discharge, leading to the projection of three different battery capacities. Energy consumption in buses is divided into traction and auxiliary consumption27,28. Traction energy is influenced by occupancy, driving style, and traffic volume, while auxiliary energy, which includes heating, air conditioning, refrigeration, and ventilation, is largely dependent on temperature29,30. Factors such as door opening times and occupancy levels also affect auxiliary energy consumption. Given the significant variability in both traction and auxiliary energy consumption due to several planned and unplanned factors, different energy consumption rates were assumed for these electric bus concepts.
Regarding charging power, it was assumed that electric buses EB - 1 through EB - 5 would have a maximum effective charging power of 360 kW. At present, such high levels of charging power are predominantly attainable using pantograph systems in the bus industry. It is not necessary to have a separate charger for each vehicle, as these high-power charging sessions are primarily beneficial during daytime hours. It was projected that a single charger with four outputs could charge four buses throughout the night. To explore how assumptions about charging power might affect outcomes, the study also considered lower maximum effective charging powers of 120 kW (for EB - 6) and 60 kW (for EB - 7), levels that are typically achievable using CCS2 connectors.
Deriving vehicle and crew schedules
The task of organizing electric vehicles is referred to as the electric vehicle scheduling problem (E-VSP), a topic explored in various publications31,32. By considering the crew scheduling of drivers, the problem is extended to the E-VCSP, a subject previously tackled in literature8,33,34. The E-VCSP is classified as an NP-hard problem.
The E-VCSP aims to create optimal schedules for electric vehicles and their crews, focusing on minimizing costs while covering all planned trips. Vehicle schedules must manage electric buses’ energy use effectively, keeping the battery charged above zero. Crew scheduling assigns trips and idle times to specific duties, adhering to legal work and breaking time limits based on EU and German regulations. Drivers’ maximum continuous driving time is 4.5 h, with mandated breaks ranging from one 30-min, two 20-min, or three 15-min breaks. German law also allows breaks proportional to 1/6 of the driving time, with a minimum of 10 min. Two scenarios explore different break and duty change locations: Scenario A permit breaks at depots and terminal stops, offering flexibility in crew scheduling, while scenario B restricts duties to start and end at the depot.
The E-VCSP can be formulated mathematically as follows. Let \(T\) be the set of timetabled service trips, \(B\) be the set of all feasible blocks and \(D\) be the set of all feasible duties. The costs of block \(b\in B\) is represented as \({c}_{b}^{1}\). The costs of duty d \(\in D\) is represented as \({c}_{d}^{1}.\) \({A}^{1}\), \({A}^{2}\), \({A}^{3}\), \({A}^{4}\), \({A}^{5},{A}^{6}\) are binary matrices. \({a}_{{tb}}^{1}\) is 1 if block \(b\in B\) covers service trip \(t\in T.\) \({a}_{{td}}^{2}\) is 1 if duty \(d\in D\) covers service trip \(t\in T.\) \({a}_{{fb}}^{3}\) is 1 if block \(b\in B\) contains deadhead \(f\in F\). \({a}_{{fd}}^{4}\) is 1 if block \(d\in D\) contains deadhead \(f\in F\). \({a}_{{ib}}^{5}\) is 1 if block \(b\in B\) contains idle time \(i\in I\). \({a}_{{id}}^{6}\) is 1 if block \(d\in D\) contains idle time \(i\in I\). Binary variables \({x}_{b}\), \({y}_{d}\) indicate if block \(b\in B\) and \(\in D\) is selected as part of the vehicle and crew schedule.
The objective of the E-VCSP is to minimize the total costs (2), including both capital and operating costs. Constraint (3) ensures that each trip is covered by exactly one block and, therefore, by exactly one vehicle. Constraint (4) ensures that each service trip is driven by exactly one driver within a duty. Constraints (5) to (6) ensure that the selected duties match the selected blocks, in order to create a combination of a vehicle schedule with a suitable crew schedule.
This work employs an ALNS heuristic to address the E-VCSP, as developed in Sistig et al. 8. ALNS heuristics have been successfully applied to a large variety of electric vehicle routing problems35. The method iteratively improves solutions by exploring neighborhoods formed by systematically combining destroy and repair strategies, with the selection of these strategies dynamically adjusted based on their performance.
The search process for the E-VCSP, as outlined in Algorithm 1, is divided into three integrated phases. The first phase deals with the E-VSP, where the methodology involves iteratively exploring the neighborhood of the current solution x. This is achieved using destroy and repair methods to find a new solution.
Algorithm 1
Staged ALNS for the E-VCSP
1:\(z\leftarrow I{\rm{nitializeSolution}}()\);
2: \((\rho ,{\rho }_{{EVSP}},{\rho }_{{CSP}})\leftarrow I{\rm{nitializeWeights}}()\);
3: while stop criteria are not met do
4: \((x,{y}_{z})\leftarrow z\)
5: \(({k}_{{EVSP}},{k}_{{CSP}})\leftarrow {GetIterations}(p)\)
6: while\(k\le {k}_{{EVSP}}\) do
7: Select destroy and repair method of E-VSP based on \({\rho }_{{EVSP}}\);
8: \({x}_{d}\leftarrow {Destroy}\left(x\right);\)
9: \({x}_{r}\leftarrow {Repair}({x}_{d})\);
10: if \({Accept}\left({x}_{r},x\right)\) then
11: \(x\leftarrow {x}_{r}\);
12: \({\rho }_{{EVSP}}\leftarrow {UpdateWeights}({\rho }_{{EVSP}})\);
13: end
14: Derive CSP;
15: \(y\leftarrow I{\rm{nitializeSolution}}\)(\({y}_{z}\));
16: while \(k\le {k}_{{CSP}}\) do
17: Select destroy and repair method of CSP based on \({\rho }_{{CSP}}\);
18: \({y}_{d}\leftarrow {Destroy}(y)\);
19: \({y}_{r}\leftarrow {Repair}({y}_{d})\);
20: if \({Accept}\left({y}_{r},y\right)\) then
21: \(y\leftarrow {y}_{r}\);
22: \({\rho }_{{CSP}}\leftarrow {UpdateWeights}({\rho }_{{CSP}})\);
23: end
24: \(z{\prime}\) \(\leftarrow (x,y)\);
25: if A\({\rm{ccept}}\left(z\mbox{'},{z}^{* }\right)\) then
26: \(z\leftarrow {z}^{{\prime} }\);
27: if \({\rm{f}}\left(z\mbox{'}\right) < {\rm{f}}\left({z}^{* }\right)\)) then
28: \({z}^{* }\leftarrow {z}^{{\prime} }\);
29: \((\rho ,{\rho }_{{EVSP}})\leftarrow {UpdateWeights}(\rho ,{\rho }_{{EVSP}})\);
30:end
31:return \({z}^{* }\)
In the second phase, the focus shifts to deriving the corresponding crew scheduling problem (CSP) based on this newly developed E-VSP solution. This phase allows for incorporating elements from previous solutions, which is particularly useful when many blocks remain consistent in the new solution. The final phase applies an ALNS heuristic, like that used in the E-VSP, to identify an optimal solution for the CSP. The iteration counts for the ALNS heuristic, critical for both the E-VSP and CSP components, are a key aspect of the overall meta-method in this process.
In this work, the ALNS approach for the E-VSP focuses on assigning trips to blocks and bus runs, utilizing various destroy methods—random trip, block removal, worst block, and time-based removal—to disassemble the current solution. These methods range from removing trips or blocks at random to targeting those with higher costs or similar times. Reconstruction employs repair methods, including concurrent scheduler algorithm (CSA)-based strategies and regret insertion heuristics, to reassign trips to blocks and bus runs, optimize trip sequencing, and integrate regret-based approaches for improved solution building.
For the CSP, the methodology segments block into tasks based on relief opportunities, defining a task as consecutive trips handled by the same driver. Tasks are then assigned to duties, with the ALNS heuristic further refining this solution through destroy methods like random task and duty removal, worst duty removal, and block-based removal. Repair methods reassign tasks to duties, employing CSA strategies and regret insertion for sequence optimization. Each iteration of the CSP-ALNS process updates the CSP’s weight matrices, aiming for minimal extended driver relief periods and efficient duty assignments.
Calculation of the total cost of ownership
The calculation of TCO is derived from the net present value \({NPV}\). For this analysis, annual cash flows \({CF}\) are documented over the defined time horizon N and then discounted using the interest rate \(i\):
In this work, the base vehicle price was set at 350,000 € for diesel buses and at 500,000 € for electric buses36. The total price for electric buses includes both the base vehicle and a battery cost set at 350 €/kWh, with an annual battery cost reduction of 5%36,37,38,39. The cost assumptions for batteries are not trivial, as costs in this area are very dynamic and are expected to interact with the cost of batteries in heavy-duty trucks, which are forecast to fall significantly in price40. It is assumed that the battery will need to be replaced after 8 years due to its finite life.
The cost of vehicle maintenance was set at 0.50 €/km36. The cost of installing the charging infrastructure is estimated at 800 €/kW36,41,42,43. Maintenance and repair costs for these charging stations are estimated at 30 €/kW/a41. The cost of each duty started was assumed to be 75 €, and the costs of each paid driver hour was assumed to be 25 €. The estimate is based on the average cost of a professional driver for a transport operator, considering holiday and sick leave. Energy costs are assumed to be 0.30 €/kWh for electricity44 and 1.70 €/l for diesel fuel, with an assumed annual cost increase of 5% for both sources45. An annual interest rate of 5% is applied, and all operating expenses are discounted over a 12-year period.
Results
To be able to make general statements that go beyond individual networks, twenty networks were selected from the GTFS data based on mileage, average speed in regular service, and timetable uniformity. The uniformity of the timetable is measured in this work by the average number of parallel trips in the period from 6 a.m. to 10 p.m. in relation to the maximum number of parallel trips. To assess electrification, seven electric bus concepts (EB - 1 to EB - 7) were considered and compared with DB as a reference. The electric bus concepts EB - 1 to EB - 5 differ in terms of energy consumption and usable battery capacity and have a high charging capacity. EB - 6 and EB - 7, on the other hand, have a lower charging capacity but average assumptions for energy consumption and battery capacity. To consider the influence of crew scheduling restrictions, two scenarios A and B were considered, differing in whether drivers are allowed to take breaks only at the depot or also at terminal stops.
The combination of these assumptions resulted in a total of 320 cases for which suitable vehicle and crew schedules were first created. TCO and other metrics were then determined to assess the impact of electrification. The detailed results, including the vehicle schedules, crew schedules and total cost of ownership of the 320 cases, are attached at46. The main findings are presented below.
Effects on the total cost of ownership
Figure 3 shows the average costs for vehicles, maintenance, charging infrastructure, energy, and drivers across all networks. The results indicate that switching to electric buses is associated with a higher TCO, mainly due to the significant investment in the buses themselves and the necessary charging infrastructure. The higher initial costs are not fully offset by lower energy costs, so the overall TCO increases. Driver and maintenance costs are similar for diesel and electric buses. Across all networks, this leads to a general increase in costs of 10% for EB - 3, 12% for EB - 6, and 16% for EB - 7. Assuming lower energy consumption, electric buses have lower TCO than diesel buses in some cases. However, on average, the costs are also 1% higher for EB - 1 and EB - 2. For EB - 4 and EB - 5, the average percentage increase is 20 and 23%, respectively. This finding underscores the feasibility of electrifying bus fleets at a modest additional financial cost, provided that operational schedules are adjusted accordingly.

a Breakdown of the average TCO per service mileage for the cost components vehicles, maintenance, charging infrastructure, energy, and drivers for electric buses (EB) and diesel buses (DB). The TCO per service mileage was calculated by unweighted averaging across all networks, crew scenarios, and bus concepts. b Breakdown of the average TCO per service mileage for the cost components vehicles, maintenance, charging infrastructure, energy, and drivers per service mile for all bus concepts. The TCO per service mileage was calculated by unweighted averaging across all networks and crew scenarios. c Breakdown of the average TCO per service mileage for the cost components vehicles, maintenance, charging infrastructure, energy, and drivers for DB and EB and crew scenarios A and B. The TCO per service mileage was calculated by unweighted averaging across all networks. d Distribution of the relative change in TCO compared to the diesel reference for all electric bus concepts.
The cost differences between the electric bus concepts are dominated by the energy consumption assumptions. The percentage of additional cost for networks is similar for each electric bus concept. The outliers are due to networks with low mileage. The analysis showed no significant correlation between the percentage of additional cost of a network and the mileage, average speed, and regularity of the schedule.
On average, there is little difference in the cost of electric buses between scenario A and B for crew scheduling constraints (5.97 €/km and 6.01 €/km, respectively). In terms of costs, it made no substantial difference to the networks and timetables examined whether the drivers were allowed to take their breaks only at the depot or whether they could also take a break at terminal stops. The main cost difference between the electric bus models studied is the energy cost.
Figure 4 compares the TCO per service mileage for the individual networks of electric bus concepts that have the same energy consumption. The operational impact of vehicles with higher energy consumption and lower battery capacity, and consequently shorter range, is low in the cost analysis. The difference between EB - 1 and EB - 2 is smaller than between EB - 4 and EB - 5. On the other hand, the lower charging capacities for EB - 6 and EB - 7 result in higher vehicle costs, as more vehicles are required. This is because the less frequent periods in the timetable are no longer sufficient to charge all the vehicles. The influence of low charging power is more relevant than a higher battery capacity.

a TCO per service mileage for the networks of different transport operators for EB - 1, EB - 2 with crew scenario A. b TCO per service mileage for the networks of different transport operators for EB - 1, EB - 2 with crew scenario B. c TCO per service for the networks of different transport operators for EB - 4, EB - 5 with crew scenario A. d TCO per service mileage for the networks of different transport operators for EB - 4, EB - 5 with crew scenario B. e TCO per service mileage for the networks of different transport operators for EB - 3, EB - 6, EB - 7 with crew scenario A. f TCO per service mileage for the networks of different transport operators for EB - 3, EB - 6, EB - 7 with crew scenario B. In each panel, the selected electric bus concepts have the same cost assumptions and energy consumption, so the cost differences can only be due to better operational utilization.
TCO per service mileage can significantly fluctuate based on the network and electric bus concept (Fig. 5). Nonetheless, it is observed that these costs decrease with the increase in average speeds. This trend can primarily be attributed to the costs associated with the driver, which are dependent on time. On the other hand, when examining daily mileage and the consistency of schedules, no distinct pattern emerges.

a TCO per service mileage for different networks and electric bus concepts over the daily service mileage of the transport networks. b TCO per service mileage for different networks and electric bus concepts over the average speed of the transport networks. c TCO per service mileage for different networks and electric bus concepts over the uniformity of timetable of the transport networks. Each cross represents the value for one considered case from the transport networks for crew scenario A. Each circle represents the value for one considered case from the transport networks for crew scenario B.
Demand for additional vehicles and drivers
Figure 6 shows the relative change in the number of vehicles for the different vehicle types compared to the diesel reference. The electrification of the fleet is accompanied by an increase in the number of vehicles due to the limited range and the charging processes required. On average, this results in an additional requirement of 13%.

a Distribution of the relative change in the number of vehicles compared to the diesel reference for each bus concept. For the distribution per bus concept, a total of 40 cases were used, taken from the twenty networks considered, each of which was considered in two crew scenarios. b Relative change in the number of vehicles compared to the diesel reference over the daily service mileage of the transport network. c Relative change in the number of vehicles compared to the diesel reference over the average speed of the transport network. d Relative change in the number of vehicles compared to the diesel reference over the uniformity of timetable of the transport network. Each cross represents the value for one considered case from the transport networks for crew scenario A. Each circle represents the value for one considered case from the transport networks for crew scenario B.
The additional demand varies greatly between operators. An exception to this rule is the smallest network in this analysis, where the number of vehicles in scenario A increases from one diesel vehicle to two vehicles for all electric bus concepts. Scenario B requires two vehicles for both diesel and all electric bus concepts. This shows that for low mileage networks, the number of vehicles can always increase significantly or not at all. For larger networks, the unfavorable and favorable cases are more balanced. However, the need for additional vehicles increases significantly as the maximum charging power decreases. The higher charging power allows buses to be recharged more quickly, which is particularly advantageous as many operators base their timetables on the peak ridership periods that typically occur in the morning and afternoon. It should be noted that a high charge rate gives much more favorable results than increasing the battery capacity.
As far as high charging power is concerned, most operators find it sufficient to charge their buses at depots. This is demonstrated by the fact that there is only a minimal increase in the number of buses required. The detailed analysis shows that the number of vehicles for these electric bus concepts increases significantly if the networks have a very even schedule utilization. This is the case in the selected database, especially in larger cities. For these networks, it is worth considering charging at locations other than the depot.
Figure 7 shows the changes in driver demand for the different electric bus concepts across the different networks and crew scheduling constraints. On average, the number of runs for electric buses increases by 6% compared to the diesel reference, and paid driver time increases by 2% on average. The fact that the number of runs increases more than the paid driver time indicates that the overall crew schedules need to be less favorable.

a Distribution of the relative change in the number of duties compared to the diesel reference for each bus concept. b Distribution of the relative change in paid driving time compared to the diesel reference for each bus concept. For each distribution per bus concept, a total of 40 cases were used, taken from the 20 networks considered, each of which was considered in two crew scenarios.
The increase in the number of duties and paid driver time is lower for vehicles with low energy consumption. This also applies to a lesser extent for higher battery capacities and charging power. Overall, the increase is very small, which is advantageous from the point of view of electrification. However, the upward blips in the number of duties occur in networks with very low mileage, where the problem is much more discrete, and the conversion to electric buses leads to a much less favorable layout of the crew schedules. Such circumstances can be a significant obstacle for low-mileage operators to convert to electric buses.
Operational effects
In addition to vehicle and crew scheduling, electric buses can have other impacts on the operational processes of transport operators. Table 3 shows key values for vehicle and crew schedules. Regarding the time utilization of the buses, the time in use is increasing for electric buses. Charging processes play a major role in this, while the time spent outside the depot per bus decreases. The charging processes for electric buses at the depot must be integrated into the operational processes. It is prominent that the duration of the charging processes for vehicles with low charging power increases significantly, which means that these concepts face significantly greater challenges, which can mean that vehicles cannot be recharged in time. The findings imply that a higher charging power of up to 450 kW offers operational advantages for many transport operators. It is also noticeable that an increase in energy consumption significantly increases the time required for charging. These figures indicate that a reduction in charging power would increase the time challenges and the number of vehicles.
Drivers’ average duty time is slightly shorter for electric buses and decreases slightly in addition to when the energy challenge increases. This indicates that the crew schedules must be cut somewhat less favorably from the transport operator’s point of view. The average mileage (total and in-service) per vehicle decreases only slightly for electric buses. Due to the trend towards an increasing number of blocks, the mileage per block decreases slightly more. This effect is much more visible in vehicles with higher energy consumption. Overall, however, the changes in this area are not very significant. In terms of energy consumption, the share of auxiliary consumers increases significantly for EB - 4 and EB - 5, accounting for about 50% of the total energy consumption. The influence of inefficient vehicle schedules on energy consumption due to an increasing proportion of deadhead mileage is only slightly noticeable. A detailed look at the individual scenarios shows that the average energy consumption depends mainly on the average speed.
Discussion
The implications of the results are discussed below, along with the limitations of this work and future research directions.
-
1.
How do the specific conditions of a public transport network affect the costs of electrification?
Electrifying bus fleets results in higher TCO. The higher cost is due to increased investment in buses and charging infrastructure, which is not fully offset by lower energy costs. However, the resulting additional costs are very moderate on average. On average, across all networks and electric bus concepts studied, the additional cost of changing vehicle and crew schedules is 12%. This implies that the bus fleets in public transport can be electrified with moderate additional financial expenditure. This applies to all types of networks, including heavy urban, easy urban, and suburban.
The cost differences between the examined electric bus concepts were dominated by the energy consumption assumptions. For the electric buses with average energy consumption, the ability to charge during the day at the depot with high charging powers of up to 450 kW was shown to reduce costs. On the other hand, increasing the usable battery capacity had a smaller impact on costs. The percentage additional costs for the networks were at a similar level for the respective electric bus concepts.
When comparing costs with existing literature, it is important to conduct the analysis at the fleet level, considering vehicle scheduling. Taking these factors into account reveals higher relative incremental costs due to the operational limitations of electric buses. Studies that include vehicle scheduling report additional costs ranging from 35%7 and 18 to 50%47 for the most cost-effective electric bus concepts. However, when the full cost of the driver is considered, these additional costs are reduced to 14%7 and 14 to 26%8. Previous studies conducted at the route level have suggested that increasing crew scheduling constraints leads to a slight reduction in the cost differences between diesel and electric buses8. In this study, conducted at the network level, the cost differences between scenarios A and B were relatively small, despite differences in allowances for drivers to take breaks outside the depot.
-
2.
How does electrification affect the demand for drivers and buses for public transport?
The electrification of bus fleets leads to an average increase of 13% in the number of vehicles for the networks considered. There are only outliers for networks with low mileage. Furthermore, the increase is strongly influenced by the chosen electric bus concept. The number of vehicles required increases significantly more for concepts with lower charging power. For operators with a very regular timetable, where vehicles are in constant use between 6 a.m. and 10 p.m., the additional demand for buses increases even more if a lower charging power is chosen.
The shift towards electrification marginally affects driver demand, causing a 6% increase in the number of duties and a 2% rise in the total duration of paid driver hours. Overall, the larger increase in duties indicates that some of the crew schedules will have to be slightly less favorable.
-
3.
What challenges does public transport electrification pose for vehicle and crew scheduling?
When converting to electric buses, it is necessary to adjust vehicle and crew schedules to fully electrify the service. The results show that the time of use of the buses increases significantly due to the charging processes. Integrating these charging processes into the operating schedule is, therefore, a major challenge, as no repairs or maintenance can be carried out during these times. At lower charging powers, the challenges are even greater.
However, the total time out of the depot and the total mileage per bus are only slightly reduced as a result. Overall, the deadhead mileage in the vehicle schedules increases only very moderately. Furthermore, the findings indicate that the mileage per block depends very much on the average speed and the uniformity of the schedule. The influence of the average speed is due to the energy consumption for auxiliary consumers, which depends on the time and not on the mileage. Since this plays a significant role in energy consumption, simplistic considerations with a fixed range in kilometers per block are not useful. In terms of crew scheduling, the number of duties is increasing, and the duties are becoming somewhat shorter.
Overall, the data reveal that the electrification of public transport can be realized with moderate additional costs. The increase in the number of vehicles is manageable and the number of additional drivers remains very low. This requires an adjustment of vehicle and crew schedules and the selection of a suitable electric bus concept.
The results indicate that a higher charging power of up to 450 kW offers operational advantages for many operators. Consequently, these results suggest that with current vehicle configurations, it is more attractive to increase the maximum charging power than to further increase the battery capacity.
The results also suggest that for most operators, charging at the depot is sufficient if it is possible to charge the vehicles there during the day with high charging power. An exception to this statement is networks that have a very consistent schedule from 6 a.m. to 10 p.m., where most vehicles are in continuous use. These schedules were found only on networks in large cities. In these cases, it may be worth considering installing additional charging points at terminal stops or central locations to charge buses closer to where they are and while they are in use.
The findings of this study must be seen under consideration of some restrictions. This paper makes assumptions about costs, although many cost parameters are constantly changing. This is especially true in the near future, as the bus sector is linked to the truck sector, where a rapid increase in vehicle production is expected. Developments in this area are, therefore, difficult to predict and are always subject to regional specifics. This also applies to the cost of additional construction that may be required due to additional vehicles and the increased space required by electric buses. As a result, the results of the TCO calculation are subject to uncertainty.
In the context of this study, the objective was to examine the potential variations in technical parameters in response to energy restrictions. The electric buses were operated in a depot charging mode. The comparison of electric bus systems with different charging strategies represents a topic of ongoing interest within the research community. This is particularly pertinent considering the ongoing evolution of costs and technologies. The integration of diverse, specialized concepts for different deployment scenarios has the potential to reduce costs. Identifying the optimal fleet composition represents an intriguing avenue of research. A similar argument can be made about the comparison of different bus concepts and the coordination of their use on scheduled routes. From an operational standpoint, however, it can be stated that the additional operating costs resulting from energy restrictions are only moderate, even with depot charging, if vehicle and crew scheduling are adapted accordingly.
While the utilization of GTFS data offers a robust foundation for analyzing numerous transport operators, it is not without its limitations. Data comprehensiveness cannot be assured across all operators, particularly concerning special trips for schoolchildren and other specific groups. Nonetheless, it is noteworthy that these additional service trips may exhibit heightened frequency during specific times of the day, potentially influencing the operational profile of a transport operator. It is also important to note that GTFS data lacks pertinent information pertaining to bus capacity and various operational facets of transport operators. These factors encompass constraints related to crew scheduling, depot capacity, and the utilization of subcontractors. Nevertheless, it is imperative to acknowledge that these variables may exert a discernible impact on the outcomes for individual operators. In this work, the conversion of the entire network was also considered, but most transport operators will convert their fleet in stages. The twenty networks were selected to be representative of the set of networks for which GTFS data is available. It should be noted, however, that the GTFS format is particularly prevalent in Europe and the United States, so the focus is on those regions. It would be interesting to look at other regions of the world where networks may look significantly different. This is especially true for networks in more densely populated regions. It is also interesting to examine the interactions with other modes of transportation, such as trams, which may influence the services provided by the bus network.
For future adaptations of bus networks, which today follow proven rules48, the question is how to optimize them for operation with electric buses49. Adjustments to route length50, frequency of service, and vehicle size51 are interesting. The interactions with the advent of autonomous vehicles51,52,53 and other mobility options are interesting areas for research, especially at the level of entire networks rather than individual bus routes.
Solving the E-VCSP presents a formidable challenge, and the employed heuristic does not offer a guarantee of finding optimal solutions. The extensive scope, comprising a multitude of scenarios, renders the investigative process time-intensive. The pursuit of more streamlined heuristics capable of identifying better solutions, especially for extremely large scenarios, is an intriguing area for further research. Another interesting extension would be to consider vehicles with different battery capacities and charging power in the fleet.
Due to the additional charging time at the depot, vehicle utilization increases significantly, which can generally lead to organizational challenges. In this study, the charging process and integration into existing depot processes were not considered in detail. Overcoming these challenges is an interesting research topic.
Conclusion
This study addressed key research questions regarding the impact of bus fleet electrification: the cost implications of specific public bus network conditions, the impact on vehicle and driver demand, and the challenges for vehicle and crew scheduling. To this end, we selected bus networks from twenty representative transport operators and generated vehicle and crew schedules for seven electric bus concepts using an adaptive large neighborhood search heuristic. The concepts represented articulated buses in depot loading, and the technical parameters varied mainly around energy constraints. Based on the obtained vehicle and crew schedules, total operating costs, vehicle and driver demand, and charging requirements were calculated.
The results suggest that the energy restrictions of electric buses are associated with moderate additional financial and operational costs at the network level due to adjustments in vehicle and crew scheduling. Costs for electric buses were about 12% higher than for diesel buses. On average, the number of vehicles required increased by 13%. In terms of driver demand, the number of duties increased by 6%, and the duration of paid time increased by 2%. This implies a less favorable distribution of driving time across duties, but overall, the effects are rather small. The effects were relatively consistent across the twenty networks considered—outliers were only observed for very small networks. There were no pronounced differences between urban and rural areas. This suggests that with current technology, electrification is basically feasible in both urban and rural areas with moderate additional expenditures.
In terms of energy constraints, it was found that the operational advantages of an achievable charging power of around 360 kW compared to 120 kW were greater than those of increasing the usable battery capacity from 400 to 500 kWh. However, the high charging power was practically only relevant during the day. The reduction in energy consumption was particularly noticeable in terms of costs, in addition to the benefits in terms of vehicle and crew scheduling. The results show that the time of use of the buses increases significantly due to the charging processes, which can lead to operational challenges.
Developing more efficient algorithms for solving large instances of the electric vehicle and crew scheduling problem is an interesting research topic. The same applies to methods for finding the optimal fleet mix for transport operators. In addition, research into systematic adjustments to network design so that it can be operated as well as possible by electric buses is an interesting research direction.
Data availability
The data can be found here: https://doi.org/10.6084/m9.figshare.26088190 Supplementary material for the paper “Evaluating Costs and Operations of Public Bus Fleet Electrification” The following data is included: (01) Detailed statistics on the transport operators included in the processed GTFS data from DELFI and the Mobility Database, (02) Data on routes, trips, itineraries, stops and possible deadhead trips for the selected transport operators, (03) Vehicle schedules and crew schedules, as well as charging plans for all scenarios analyzed, (04) Costs, energy consumption, and other key figures for the scenarios analyzed. The .zip file includes documentation and explanations for all the data.
References
Office Publications. Directive (EU) 2019/ 1161 of the European Parliament and of the council - of 20 June 2019 - amending Directive 2009/33/EC on the promotion of clean and energy-efficient road transport vehicles. https://eur-lex.europa.eu/legal-content/EN/ALL/?uri=CELEX%3A32019L1161 (2019).
Publications Office of the European Union L-2985 Luxembourg LUXEMBOURG. Regulation (EU) 2024/1610 of the European Parliament and of the Council of 14 May 2024 amending Regulation (EU) 2019/1242 as regards strengthening the CO2 emission performance standards for new heavy-duty vehicles and integrating reporting obligations, amending Regulation (EU) 2018/858 and repealing Regulation (EU) 2018/956 (Text with EEA relevance). http://data.europa.eu/eli/reg/2024/1610/oj (2024).
ZeEUS Project. ZeEUS eBus Report #2: An Updated Overview of Electric Buses in Europe. https://zeeus.eu/uploads/publications/documents/zeeus-report2017-2018-final.pdf (2018).
Rogge, M., Wollny, S. & Sauer, D. U. Fast charging battery buses for the electrification of urban public transport—a feasibility study focusing on charging infrastructure and energy storage requirements. Energies 8, 4587–4606 (2015).
Lajunen, A. Lifecycle costs and charging requirements of electric buses with different charging methods. J. Cleaner Prod. 172, 56–67 (2018).
Rogge, M., van der Hurk, E., Larsen, A. & Sauer, D. U. Electric bus fleet size and mix problem with optimization of charging infrastructure. Appl. Energy 211, 282–295 (2018).
Jefferies, D. & Göhlich, D. A comprehensive TCO evaluation method for electric bus systems based on discrete-event simulation including bus scheduling and charging infrastructure optimisation. World Electr. Veh. J. 11, 56 (2020).
Sistig, H. M. & Sauer, D. U. Metaheuristic for the integrated electric vehicle and crew scheduling problem. Appl. Energy 339, 120915 (2023).
Perumal, S. S., Lusby, R. M. & Larsen, J. Electric bus planning & scheduling: a review of related problems and methodologies. Eur. J. Oper. Res. 301, 395–413 (2022).
Meinrenken, C. J. & Lackner, K. S. Fleet view of electrified transportation reveals smaller potential to reduce GHG emissions. Appl. Energy 138, 393–403 (2015).
VDV Ausschuss für Personalwesen. Personalstrategisches Papier. https://www.vdv.de/personalstrategisches-papier-langfassung-2023.pdfx (2023).
IRU. Driver Shortage Report 2023 Passenger - Europe - Executive summary. https://www.iru.org/resources/iru-library/driver-shortage-report-2023-passenger-europe-executive-summary (2023).
Topal, O. & Nakir, İ. Total cost of ownership based economic analysis of diesel, CNG and electric bus concepts for the public transport in Istanbul City. Energy https://doi.org/10.3390/en11092369 (2018).
Kim, H., Hartmann, N., Zeller, M., Luise, R. & Soylu, T. Comparative TCO analysis of battery electric and hydrogen fuel cell buses for public transport system in small to midsize cities. Energies https://doi.org/10.3390/en14144384 (2021).
López, I. et al. Different approaches for a goal: the electrical bus-EMT Madrid as a successful case study. Energies https://doi.org/10.3390/en15176107 (2022).
Ribeiro, P. J. G. & Mendes, J. F. G. Public transport decarbonization via urban bus fleet replacement in Portugal. Energies https://doi.org/10.3390/en15124286 (2022).
Yusof, N. K., Abas, P. E., Mahlia, T. M. I. & Hannan, M. A. Techno-economic analysis and environmental impact of electric buses. World Electr. Veh. J. https://doi.org/10.3390/wevj12010031 (2021).
Harris, A., Soban, D., Smyth, B. M. & Best, R. Assessing life cycle impacts and the risk and uncertainty of alternative bus technologies. Renew. Sustain. Energy Rev. 97, 569–579, https://doi.org/10.1016/j.rser.2018.08.045 (2018).
Ozdagoglu, A., Zeynep Oztas, G., Kemal Keles, M. & Genc, V. A comparative bus selection for intercity transportation with an integrated PIPRECIA & COPRAS-G. Case Stud. Transp. Policy 10, 993–1004 (2022).
Borghetti, F. et al. Evaluating alternative fuels for a bus fleet: an Italian case. Transport Policy 154, 1–15 (2024).
Ou, X., Zhang, X. & Chang, S. Alternative fuel buses currently in use in China: life-cycle fossil energy use, GHG emissions and policy recommendations. Energy Policy 38, 406–418 (2010).
Göhlich, D. et al. in Design Methodologies for Future Products (eds Krause, D. & Heyden, E.) Ch. 7 (Springer, 2021).
Rahman, M. M. & Thill, J.-C. Impacts of connected and autonomous vehicles on urban transportation and environment: a comprehensive review. Sustain. Cities Soc. 96 (2023).
Miskolczi, M., Földes, D., Munkácsy, A. & Jászberényi, M. Urban mobility scenarios until the 2030s. Sustain. Cities Soc. 72, 103029 (2021).
Start / DELFI e.V. https://www.delfi.de/ (2024).
Mobility Database. https://database.mobilitydata.org/ (2024).
Szilassy, P. Á. & Földes, D. Consumption estimation method for battery-electric buses using general line characteristics and temperature. Energy 261, 125080 (2022).
Vepsäläinen, J., Otto, K., Lajunen, A. & Tammi, K. Computationally efficient model for energy demand prediction of electric city bus in varying operating conditions. Energy 169, 433–443 (2019).
Göhlich, D., Ly, T.-A., Kunith, A. & Jefferies, D. Economic assessment of different air-conditioning and heating systems for electric city buses based on comprehensive energetic simulations. World Electr. Veh. J. 7, 398–406 (2015).
Cigarini, F., Fay, T.-A., Artemenko, N. & Göhlich, D. Modeling and Experimental Investigation of Thermal Comfort and Energy Consumption in a Battery Electric Bus. World Electr. Veh. J. 12, 7 (2021).
Wen, M., Linde, E., Ropke, S., Mirchandani, P. & Larsen, A. An adaptive large neighborhood search heuristic for the electric vehicle scheduling problem. Comput. Oper. Res. 76, 73–83, (2016).
van Kooten Niekerk, M. E., van den Akker, J. M. & Hoogeveen, J. A. Scheduling electric vehicles. Public Transp 9, 155–176 (2017).
Perumal, S. S. et al. Solution approaches for integrated vehicle and crew scheduling with electric buses. Comput. Oper. Res. 132, 105268 (2021).
Perumal, S. S., Lusby, R. M. & Larsen, J. A Review of Integrated Approaches for Optimizing Electric Vehicle and Crew Schedules. https://orbit.dtu.dk/en/publications/a-review-of-integrated-approaches-for-optimizing-electric-vehicle (2020).
Erdelić, T. & Carić, T. A survey on the electric vehicle routing problem: variants and solution approaches. J. Adv. Transp. 2019, 1–48 (2019).
NOW GmbH. Programmbegleitforschung Innovative Antriebe und Fahrzeuge. https://www.now-gmbh.de/wp-content/uploads/2022/04/NOW_Abschlussbericht_Begleitforschung-Bus.pdf (2022).
Nykvist, B. & Nilsson, M. Rapidly falling costs of battery packs for electric vehicles. Nat. Clim. Chang. 5, 329–332 (2015).
Nykvist, B., Sprei, F. & Nilsson, M. Assessing the progress toward lower priced long range battery electric vehicles. Energy Policy 124, 144–155 (2019).
Duffner, F., Mauler, L., Wentker, M., Leker, J. & Winter, M. Large-scale automotive battery cell manufacturing: analyzing strategic and operational effects on manufacturing costs. Int. J. Prod. Econ. 232, 107982 (2021).
Link, S., Stephan, A., Speth, D. & Plötz, P. Rapidly declining costs of truck batteries and fuel cells enable large-scale road freight electrification. Nat Energy 9, 1032–1039 (2024).
Hecht, C., Figgener, J. & Sauer, D. U. Analysis of electric vehicle charging station usage and profitability in Germany based on empirical data. iScience 25, 105634 (2022).
klimaaktiv mobil. Marktübersicht Elektro- und Wasserstoffbusse. https://www.klimaaktiv.at/dam/jcr:d2a6e621-2e54-459b-be69-6b264f05ba24/KAM_2021_Marktuebersicht_Elektrobusse.pdf (2020).
He, Y., Song, Z. & Liu, Z. Fast-charging station deployment for battery electric bus systems considering electricity demand charges. Sustain. Cities Soc. 48, 101530 (2019).
Statistisches Bundesamt (Destatis). Electricity Prices for Non-household Customers: Germany, Years, Annual Consumption Classes, Price Components https://www-genesis.destatis.de/datenbank/online/statistic/61243/table/61243-0006 (2024).
Statistische Bundesamt (Destatis). Daten zur Energiepreisentwicklung - Lange Reihen von Januar 2005 bis Januar 2023. https://www.destatis.de/DE/Themen/Wirtschaft/Preise/Publikationen/Energiepreise/energiepreisentwicklung-pdf-5619001.html (2023).
Sistig, H. M., Sinhuber, P., Rogge, M. & Sauer, D. U. Dataset for Evaluating Costs and Operations of Public Bus Fleet Electrification. https://doi.org/10.6084/m9.figshare.26088190 (2024).
Rogge, M. Electrification of public transport bus fleets with battery electric buses – Development of a software toolchain for the changeover planning of entire bus fleets with consideration of technical and operational constraints. Dissertation https://doi.org/10.18154/RWTH-2021-02146 (2021).
Ceder, A. & Wilson, N. H. Bus network design. Transport. Res. Methodol. 20, 331–344 (1986).
Häll, C. H., Ceder, A., Ekström, J. & Quttineh, N.-H. Adjustments of public transit operations planning process for the use of electric buses. J. Intell. Transport. Syst. 23, 216–230 (2019).
Barabino, B. in Urban Transport XV (ed. Brebbia, C. A.) (WIT Press, 2009).
Hatzenbühler, J., Cats, O. & Jenelius, E. Transitioning towards the deployment of line-based autonomous buses: consequences for service frequency and vehicle capacity. Transp. Res. A Policy Pract. 138, 491–507 (2020).
Sistig, H. M., Sinhuber, P., Rogge, M. & Sauer, D. U. Optimizing fleet structure for autonomous electric buses: a route-based analysis in Aachen, Germany. Sustainability 16, 4093 (2024).
Fielbaum, A. Strategic public transport design using autonomous vehicles and other new technologies. Int. J. Intell. Transp. Syst. Res. 18, 183–191 (2020).
Funding
Open Access funding enabled and organized by Projekt DEAL.
Author information
Authors and Affiliations
Contributions
Conceptualization, H.M.S., P.S., M.R., and D.U.S.; methodology, H.M.S., P.S., and M.R.; software, H.M.S.; writing—original draft preparation, H.M.S.; writing—review and editing, P.S., M.R., and D.U.S.; visualization, H.M.S.; supervision, D.U.S.
Corresponding authors
Ethics declarations
Competing interests
The authors declare no competing interests.
Additional information
Publisher’s note Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Sistig, H.M., Sinhuber, P., Rogge, M. et al. Evaluating costs and operations of public bus fleet electrification. npj. Sustain. Mobil. Transp. 2, 15 (2025). https://doi.org/10.1038/s44333-025-00030-y
Received:
Accepted:
Published:
Version of record:
DOI: https://doi.org/10.1038/s44333-025-00030-y
