
Abstract
Flexible actuators have significant potential in intelligent micromachines, artificial muscle, and soft robotics. However, achieving actuators with high actuation performance and feedback sensitivity remains challenging. Inspired by the dual “command-execution-feedback” of the mimic octopus, a fiber actuator with high stroke and visual-electronic dual feedback is designed by introducing an ionic liquid conductive network and a visual component of spiropyrane. By constructing a unique interchain slipping structure inside the liquid crystal elastomer (LCE), the nematic to isotropic transition temperature and maximum stroke temperature dropped to 24.29 °C and 62.3 °C, with decreases of 73.51% and 39.28%, respectively. Besides, the actuation stroke increases to 43.41% with an improvement of 77.11%, and the feedback sensitivity reaches to 69.17, along with a high work capacity of 189.12 kJ/m3. These provide a promising strategy for next-generation flexible actuators capable of high work capacity, large stroke, and real-time feedback.
Similar content being viewed by others


Introduction
Flexible actuators, responding to external stimuli and enabling precise motion control, are ideal for universal motion, manipulating delicate objects, and adaptive interactions, while their promising applications in intelligent micromachines, exoskeleton artificial muscles, and soft robots have drawn significant attention1,2,3,4,5,6,7. Precise control of complex behavioral paradigms demands iterative steps of “command-execution-feedback,” putting forward requirements for actuators with high actuation stroke and self-sensing feedback sensitivity. Currently, pneumatic actuators achieve expansion and contraction by regulating the air pressure and flow direction8,9,10. Structural elasticity differences in different directions help convert air pressure into actuation strain11,12,13. Dielectric elastomer actuators rely on the shape change of dielectric layers under high-voltage electric field14,15,16. The varying bending stiffness of the dielectric layer induces multimodal actuation17. Hydrogel actuators utilize anisotropic water transport for deformation and manipulating fragile objects18,19,20. However, the flexible actuator with high actuation stroke and self-sensing feedback sensitivity remains challenging.
LCE, a typical stimulus-responsive smart material, encompassing the properties of polymeric elastomers (entropy elasticity) with the self-organized assemblies of massive rigid mesogenic units21,22, exhibits reversible shape changes via nematic-to-isotropic phase transition. Fiber materials have excellent softness, flexibility, and abundant hierarchical structures, becoming the ideal substrate for constructing multifunctional flexible actuators23,24. LCE fiber-based flexible actuators have been manufactured through mold forming, melt spinning, and electrospinning25,26. A kind of LCE fiber with three-dimensional deformability and reconfigurability obtained a contraction of 34% under 120 °C27. Similarly, a composite fiber actuator with braiding silver-plated nylon strands and LCE fiber, obtained a contraction of 34% under 114 °C with a work capacity of 34.21 kJ/m3 28. In order to improve the actuation strain, LCE microfiber actuators via a electrospinning technique were fabricated, generating an improved contraction of 55%, but still requiring a high temperature of 120 °C and lacking the essential self-sensing ability for monitoring the actuator’s displacement29. Through introducing a polyurethane network into the LCE, the Ti of actuators was reduced to 53.8 °C and a actuation strain of 40.6% with a work capacity of 129.92 kJ/m3 was obtained, while the actuator was further equipped with a self-sensing ability, however the feedback sensitivity was low to 4.7530. Moreover, injecting hollow LCE fibers with liquid metal (LM) creates core-sheath fiber, where LM’s Joule heating triggers LCE actuation while electrical conductivity changes according to the Pouillet law enable real-time feedback31,32,33,34,35,36, realizes the integration of actuation and self-sensing feedback. Consequently, the LCE-LM fiber can be applied to soft robots that perform elaborate tasks such as object recognition and sorting37. However, the LCE-LM fiber actuator showed a maximum actuation strain of 40% at a high temperature of 140 °C with a work capacity of 125.82 kJ/m3, and the feedback sensitivity is only 0.35. It can be seen that an efficient actuator with high stroke, feedback sensitivity, work capacity, and low working temperature remains missing.
The mimic octopus exhibits remarkable deformation and color change, becoming a formidable ocean predator and escape artist relying on a dual “command-execution-feedback” closed-loop control system38,39. Inspired by this, a high-stroke contraction and visual-electronic dual-feedback flexible fiber actuator (HSVEA) based on the composite LCEF was designed. Through the conductive ionic network isomerization, the electronic feedback is obtained and the feedback sensitivity reaches up to 69.17. SP is introduced into LCE as a visual component to provide visual feedback. Additionally, ionic liquid (IL) and spiropyrane (SP) are used to construct a unique interchain slipping structure inside the LCE, where the nematic to isotropic transition temperature (Ti) of LCEF containing IL and SP components (ISLCEF) is significantly reduced to 24.29 °C, and its maximum stroke temperature (Tsmax) is dropped to 62.3 °C, with decreases of 73.51% and 39.28%, respectively, compared with pure LCE fiber (LCEF). Besides, the actuation stroke is increased to 43.41% with an improvement of 77.11% along with a high work capacity of 189.12 kJ/m3. These indicate that ISLCEF has great application prospects in important frontier fields such as intelligent micromachines, artificial muscles for exoskeletons, and soft robots.
Results
ISLCEF design schematics and its preparation
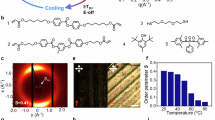
The mimic octopus exemplifies exceptional predation and escape abilities among marine species due to its advanced morphological and color-changing capabilities. As shown in Fig. 1a, when encountering a predator such as a flatfish, its “brain-muscle-nerve” closed-loop system rapidly and precisely controls the muscle deformation to mimic the appearance of a sea snake. Simultaneously, the “brain-skin-eyes” system regulates pigment cells relaxation to express the sea snake skin-like color. Through iterative steps of a dual “command-execution-feedback” control system, the mimic octopus successfully survives a narrow escape. Based on LCE, simulating the mimic octopus dual feedback closed-loop control system is used to design HSVEA with efficient actuation performances and a high feedback sensitivity, and is expected to achieve control of complex behavioral paradigms. In Fig. 1b, IL and SP were incorporated into the LCE network to construct a thermally responsive visual-electronic dual-feedback fiber material. The liquid crystal mesogenic network undergoes accelerated entropy-driven phase transitions from the nematic to isotropic phase under thermal field, resulting in axial contraction, which recovers upon cooling. On the one hand, introducing IL affects the aggregated structure of oriented LCE molecular chains, and enhances the mobility of LCE molecular chains by weakening the interaction between LCE molecular chains, forming a unique interchain slipping structure, significantly reducing the Ti and Tsmax of ISLCEF, and meanwhile improving its maximum stroke. On the other hand, the feedback ability is obtained by the reversible changes of the ion channel and mobility under strain and thermal fields. SP transforms from a closed-ring SP isomer to an open-ring merocyanine (MC) isomer under a thermal field, producing visual color changes. This visual-electronic dual feedback capability allows the actuation behavior to be accurately monitored and controlled. The ISLCEF was fabricated via a straightforward molding process, where a homogeneously mixed precursor solution (comprising IL, SP, liquid crystal monomer RM257, chain extender HDT, and PETMP) was injected into a PTFE mold for Michael addition reaction, yielding continuous ISLCEF upon demolding. This facile manufacturing process demonstrates great potential for mass production, and Fig. 1c displays a photograph of a continuous 4 m ISLCEF prepared in a single time. The prepared ISLCEF has a smooth surface and a regular circular cross section, as shown in Fig. 1d. Figure 1e, f record the reversible high stroke and visual-electronic dual feedback process of ISLCEF in a cycle (5 s for heating, 25 s for natural cooling). Besides, the voltage adopted to acquire electronic signals of the actuator is low to 3 v, and the current is less than 0.012 μA that generates almost no heat energy during working, and consequently the influences of the input current on both temperature and resulting displacement of the actuator could be ignored. The actuation thermal imaging, changes of length, visual color, and surface temperature are shown in Supplementary Figs. S1, S2 and Supplementary Movie S1, S2. The HSVEA based on the ISLCEF achieves a remarkable stroke of 43.41%, representing an improvement of 77.11% over 24.51% of pure LCEF in Supplementary Fig. S3. The Tsmax is reduced to 62.3 °C, compared with 102.6 °C of pure LCEF in Supplementary Movie S3. Especially, the feedback sensitivity reaches up to 69.17 as shown in Supplementary Fig. S4. Simultaneously, the ISLCEF exhibits a visual color transition from chartreuse (R 155, G 144, B 73) to dark magenta (R 82, G 27, B 70). The visual-electronic dual feedback capabilities, derived from the conductive ionic network isomerization of IL and the conformational transition of SP, form a “brain-muscle-nerve” and “brain-skin-eyes” dual feedback closed-loop control system similar to a mimic octopus, making ISLCEF an ideal candidate for interventional and programmable actuations.

a The “brain-muscle-nerve” and “brain-skin-eyes” dual feedback closed-loop control system of mimic octopus. b The manufacture and dual feedback mechanism of ISLCEF. c Photograph of continuously prepared ISLCEF. d Micromorphology of ISLCEF. e, f The changes of actuation stroke, visual color, and electronic signal within an actuating cycle, scale bar, 5 mm.
Constructing an interchain slipping structure inside the LCE molecular chains
Introducing IL plays a crucial role in achieving electronic feedback and enabling ISLCEF with programmable actuation. Importantly, the actuation performances of ISLCEF have been significantly enhanced due to the construction of a unique interchain slipping structure of the oriented LCE molecular chains. The interaction energies between IL and LCE chains, derived from molecular dynamics simulations, are shown in Fig. 2a. The interaction energies of [EMIM] and [TFSI] ions with LCE chains are −13.16 kcal/mol and −10.45 kcal/mol, respectively, indicating that [EMIM] has a stronger tendency to form non-covalent bonds with the LCE chain. These non-covalent bonds weaken the interaction among LCE chains and widen the distance between LCE chains, inducing changes in the aggregation structure of oriented LCE chains, greatly enhancing the mobility of molecular chain segments, and thus strengthening the fiber deformation ability. Figure 2b shows optical images of pure LCEF and the LCEF only containing IL (ILCEF) at the same initial length (15 mm) and the loaded length (87 mN). The ILCEF exhibited a 630% increase in elongation compared to pure LCEF (ILCEF: 126%, pure LCEF: 20%), deriving from the weak intermolecular interactions and low steric hindrance of the entangled chain segments in ILCEF, synergistically. Besides, this large increase in elongation is conducive to the formation of highly oriented LCE chains (Supplementary Figs. S5, S6). With the low entropy state under high orientation, ILCEF could store more elastic potential energy and lower the transition barrier between the nematic phase and isotropic phase, resulting in a high actuation stroke under a milder thermal field. To further verify the IL’s effect on the interchain slipping structure of LCE chains, the glass transition temperature (Tg) and Ti of IxS1.25LCEF were tested, as shown in Fig. 2c (x and 1.25 represent the content of IL and SP, respectively). In Supplementary Table S1, within 30%, adding IL would reduce the Tg (0%: 10.29 °C, 30%: 1.31 °C), Ti (0%: 85.79 °C, 30%: 24.31 °C) of IxS1.25LCEF and Tsmax (0%: 92.35 °C, 30%: 63.01 °C), while further increasing IL contents would lead to apparent phase separations40. Introducing IL and improving its content resulted in a maximum decrease of 3.99% in the decomposition temperature (Td) of IxS1.25LCEF, as shown in Supplementary Fig. S7. Moreover, the macroscopic mechanical properties in Fig. 2d indicate that increasing IL content positively affects the elongation at break of IxS1.25LCEF and negatively impacts its tensile strength. In detail, compared with 0% IL, the elongation at break of I30S1.25LCEF increased from 194.89% to 352.39%, and the breaking strength decreased from 19.83 MPa to 2.05 MPa, as shown in Supplementary Fig. S8. No significant changes were observed in the elongation or tensile strength when IL content exceeded 30%, consistent with the DSC results, further confirming the weakening effect of IL on intermolecular interactions of LCE and on the transition barrier between the nematic phase and the isotropic phase. The effect of IL on the actuation performance of IxS1.25LCEF is shown in Fig. 2e, f, where both the actuation stroke and actuation force were improved with increasing IL content. I40S1.25LCEF obtained the highest actuation stroke of 43.41%, an increase of 62.77% to I0S1.25LCEF and an increase of 77.11% to 24.51% of pure LCEF, as shown in Supplementary Tables S1, S2. The maximum actuation force is achieved at 0.131 N with 40% content of IL, which demonstrates the enhancement effect of IL on the mobility of LCE molecular chains. Notably, a turning point in the increasing rate of actuation stroke at 20% IL content, possibly because of the ratio of free volume to occupied volume in the molecular chains tending to saturation in this state. The thermomechanical analysis of IxS1.25LCEF samples is given in Supplementary Fig. S9. Supplementary Figs. S10, S11 show that compared with the energy dissipation of I0S1.25LCEF, that of IxS1.25LCEF with IL is reduced, indicating that the molecular chain movement encounters minimal internal friction during the phase transition under thermal stimulation, thereby generating a higher actuation stroke. Additionally, [TFSI] and partial [EMIM] ions allow ISLCEF with a conductivity by forming a conductive network, and higher IL content can enhance its electrical performance, as shown in Supplementary Fig. S12. Figure 2g reveals that the elongation negatively impacts the electrical properties of IxS1.25LCEF. Combined with the current change curves under a thermal field shown in Supplementary Fig. S13, isomerization of the conductive network in IxS1.25LCEF because of the ion channel and mobility changes in case of strain and thermal field is proved, thus producing electrical signal changes and providing the electronic feedback capability. After comprehensive consideration, subsequent studies will focus on I20S1.25LCE. Figure 2h highlights five actuation performances and feedback sensitivity of HSVEA27,28,29,30,32,33,34,37,41. In contrast, the work capacity, the constant load, and especially the feedback sensitivity is noticeably higher than that of previously reported single-fibrous LCE actuators, while the actuation stroke reaches a top level. Besides, compared with other works, the Ti and Tsmax are extremely low, benefiting to energy conservation. These characteristics allow HSVEA to cover previously inaccessible regions of the performance comparison charts of fibrous LCE actuators and are expected to reduce energy consumption.

a Interaction energies between IL and LCE molecular chains derived from molecular dynamics simulation. b The aggregation structure regulation of LCE molecular chains using IL. c DSC heating curves, d The mechanical properties, e Actuation stroke, and f Actuation force of IxS1.25LCEF with different IL contents. g The relative current changes-elongation curves. h Rader plot of actuation and feedback performances of HSVEA.
The visual feedback capability of ISLCEF
The conformational transition of SP under a thermal field endows HSVEA with visual feedback capability for overseeing the temperature field. Such as, the initial adjustment for the thermal field before operation could be made through the intuitive color changes with no need for the electronic information system. In case of the undesigned thermal field instability, the visual feedback could provide timely information to the operator for preventing the major operational failure. In Fig. 3a, the heterolytic cleavage occurs to the C-O bond at the spiro center, leading to changes in molecular conformation and electronic configuration, resulting in a conformational transition from an orthogonal to a planar configuration, thus presenting a transition from the SP to the MC state42. In Fig. 3b, I20S1LCEF shows a gradual color change from chartreuse (X 0.42, Y 0.45) to dark magenta (X 0.39, Y 0.24), where the color transition occurs instantaneously upon thermal loading or removal (Supplementary Movie S2). Additionally, the bidirectional color-change paths in the CIE 1931 coordinates nearly overlap with no hysteresis, making it a reliable indicator for intervening undesigned thermal field instability. Figure 3c, d show that the I20SyLCEF actuation stroke is a little diminished with adding SP, and the actuation force is slightly reduced with SP contents increasing from 1.25% to 2%, which results from the competitive relationship between the introduced strong polar visual component of SP and IL, probably disrupting some hydrogen bonding between IL and the LCE chains. Photographs and CIE 1931 coordinates of I20SyLCEF with different SP contents are shown in Supplementary Fig. S14. Supplementary Figs. S15–S17 show that the elongation at break of I20S1LCEF increases by 2.36%, and the breaking strength only decreases by 8.91% with 1% SP. Overall consideration, I20S1LCEF is adopted to continue further research and subsequently. In Supplementary Figs. S18, 19, I20S1LCEF can be stretched to 300% without obvious IL leakage, indicating the strong structural stability. Supplementary Fig. S20 shows that the impedance performance of I20S1LCEF is negatively correlated with the tensile strain. Furthermore, comparisons of LCEF with or without IL and SP components reveal significant physical property changes. According to the infrared absorption spectra in Supplementary Fig. S21, ILCEF exhibits a characteristic trifluoromethyl peak at 1350 cm−1, attributed to [EMIM][TFSI]40. Supplementary Fig. S22 and Supplementary Table S2 show that simultaneously introducing SP and IL can effectively reduce the Tg, Ti, and Tsmax of I20S1LCEF. Besides, the actuation force with adding SP and IL contents is given in Supplementary Fig. S23. Supplementary Fig. S24 indicates that compared with pure LCEF, IL reduces the Td of ILCEF by 17 °C with 4.78%, while SP reduces the Td of SLCEF by 6°C with 1.69%. Supplementary Fig. S25 demonstrates that IL increases ILCEF elongation at break by 96.93%, while both IL and SP could reduce I20S1LCEF tensile strength. The displacement-temperature curves of pure LCEF, ILCEF, the LCEF with only SP (SLCEF), and I20S1LCEF are shown in Supplementary Fig. S26. In Supplementary Fig. S27, the deformation of I20S1LCEF is positively correlated with the bias force. The maximum actuation stroke of 42.86% is obtained under a load of about 87 mN in Supplementary Fig. S28, probably because the higher load results in greater elongation and thus induces a higher orientation of LCE chains. Supplementary Fig. S29 indicates that the orientation of LCE chains is positively related to the elongation, stronger lightness, and two equatorial diffraction spots are observed at a higher strain of 100%. The stress–strain curves of I20S1LCEF under varying temperatures and the corresponding elastic modulus with energy output are given in Supplementary Fig. S30. Figure 3e records a reversible visual transition with the color gradually shifting between chartreuse and dark magenta. The excellent cycle stability in stroke, electrical signals, and visual color ensures I20S1LCEF viability for achieving interventional and programmable actuation. In Fig. 3f, the difference in the length change rate between the first and last cycles is only 2.94%, and the stress-strain curves before and after the cyclic actuation overlap each other highly in Supplementary Fig. S31. In Fig. 3g, the actuation force exhibits a high stability over 150 cycles with negligible fluctuations (amplitude <7.70%). In Fig. 3h, within 50 cycles, the deviation of CIE 1931 coordinate X slightly shifts to 0.0086 under a thermal field from 0.0080 at room temperature. However, the corresponding Y deviation grows up to 0.0172 from 0.0053 due to the light degradation and side reactions during the SP-to-MC transition over repeated cycles43. Supplementary Fig. S32 shows the photographs of I20S1LCEF and their corresponding CIE 1931 coordinates during different cycles. Supplementary Fig. S33 shows that the hysteresis of actuation stroke and force is as low as 1.64% and 4.14%, respectively. In Fig. 3i, a fluctuation of 12.37% in electrical signal changes is observed at the first and the last cycle. These results indicate that I20S1LCEF has a great repeatability in actuation stroke and force, electrical signal, and visual color, providing great potential for enabling control of flexible actuators with complex behavioral paradigms.

a The conformational transition of the visual component of SP under a thermal field. b The CIE 1931 coordinate changes of I20S1LCEF. c, d The effect of SP contents on the actuation stroke and force of I20SyLCEF (y refers to the SP content). e The reversible visual changes of I20S1LCEF. scale bar, 1 mm. The cyclic stability of f, g length (L) and force, h visual color, and i electrical signal of I20S1LCEF.
The visual-electronic dual feedback ability of HSVEA
Fully utilizing the visual-electronic dual feedback of I20S1LCEF enables interventional and programmable actuations. As illustrated in Fig. 4a, the electronic feedback capability originated from the conductive ionic network isomerization allows real-time acquisition of HSVEA actuation stroke. Simultaneously, HSVEA visual feedback provides a basis for intervention in undesigned thermal field instabilities. This bioinspired dual “command-execution-feedback” closed-loop control system facilitates complex and controllable deformations, enabling accurate presentation of complex behavioral paradigms. In Fig. 4b, as the thermal field increases from 46.8 °C to 63.9 °C, the color transitions from chartreuse to dark magenta, the actuation stroke increases from 19.98% to 43.20%, the actuation force rises from 0.05 N to 0.10 N, and the current peak grows from 0.06 μA to 0.12 μA. This differentiated, monotonic, and repeatable variation in stroke, electrical, and visual feedback across thermal fields provides strong support for HSVEA applicability in complex behavioral paradigm actuations. Figure 4c illustrates several typical actuation paradigms of HSVEA and its corresponding dual feedback: (i) In a low-medium-high sequential mode, the length, actuation force, and electrical signals of HSVEA increase progressively, exhibiting high correspondence. (ii)-(iv) When HSVEA operates below or above the preset mode, as well as the sudden instability, the thermal field can be adjusted timely manner based on electronic feedback to recorrect the motions (see Supplementary Movie S4–S6). (v) In case of motion suspended, the length, actuation force, and electrical signals of HSVEA change accordingly (see Supplementary Movie S7). The above results demonstrate high diversity and repeatability of HSVEA in motion modes, fully validating its potential for constructing a bioinspired dual “command-execution-feedback” closed-loop control system.

a The dual feedback for interventional and programmable actuations. b The variations of actuation stroke, force, and visual-electrical signals of HSVEA corresponding to different thermal fields. c Realizable control of complex behavioral paradigms. i, a low-medium-high sequential mode; ii–v typical modes of thermal instability, referring to above or below the set mode at the beginning, loss of control in the midway, and suspending, respectively.
The application potential of HSVEA
A HSVEA-based soft robotic arm with a visual-electronic dual feedback capability was developed for sorting, as illustrated in Fig. 5a. HSVEA simultaneously generates changes in length and visual-electrical signals under a thermal field. By programming the thermal field, the arm’s length can be controlled, enabling complex sorting tasks for items of varying heights (the height difference is about 4 mm). Moreover, the visual feedback allows operators to inspect and intervene in real-time should any system malfunction occur. In the demonstration, three shelves of different heights (labeled low, medium, and high) served as sorting targets. The robotic arm sorted stuff of different colors or weights (e.g., colored balls in this case), where the target shelf for each stuff was marked with a corresponding color, as shown in Fig. 5b (i). First, the robotic arm grabbed the stuff and moved it near the target shelf. Second, the thermal field caused the soft robotic arm to contract vertically, lifting the stuff to the desired height. Upon removing the thermal field, the robotic arm recovered, placing the stuff and completing the task. Figure 5b (ii-iii) demonstrates that the robotic arm required different contraction lengths to achieve sorting tasks, asking for longer thermal times corresponding to higher shelves, where the electrical signal increased proportionally with the required height, as shown in Supplementary Movie S8. Additionally, the arm visual change was positively correlated with the contraction stroke, with the deepest color appearing in the highest-stroke model 1, as shown in Fig. 5b (iv). The study further explored the application of HSVEA as a robotic oscillator, as illustrated in Fig. 5c. Under a thermal field, the included angle of the oscillator is reduced from 163° to 100° by 38.65%. After cooling for 25 s, the included angle recovered to 154° with 94.48%, as shown in Fig. 5d and Supplementary Movie S9, where the corresponding electronic feedback is shown in Fig. 5e (The dynamic oscillating and monitoring process is given in Supplementary Movie S10). Besides, the robotic oscillator demonstrated cyclic flapping behavior, and its cyclic included angle changes are shown in Fig. 5f. The cyclic electrical changes are given in Supplementary Fig. S34. The motion details, such as angle variation and oscillation frequency, could be controlled through programming the thermal field. These application examples underscore HSVEA vast potential in soft robotics, mechanical automation, and bioinspired robotics, owing to its high-stroke, mild, and controllable actuation, as well as visual-electronic dual feedback capabilities.

a The working illustration of the soft robotic arm. b The obtained sorting result and visual-electrical feedback of HSVEA under three models. c The oscillating demonstration. d, e The angle change and electrical feedback. f Angle changes during cyclic oscillation.
Discussion
This work constructs a visual-electronic dual feedback high-performance flexible fiber actuator with a unique liquid crystal mesogenic unit distribution by simulating the mimic octopus dual “command-execution-feedback” closed-loop control system, which enables control of complex behavioral paradigms. By constructing a unique aggregation structure of aligned LCE molecular chains, efficient contracting actions under a mild thermal field are achieved, significantly enhancing both work capacity and actuation stroke. Such flexible actuators, combining efficient actuation performance with high feedback sensitivity, have demonstrated great potential in versatile autonomous soft robots, which require interdisciplinary applications including materials and structural innovations, mechanical design, integrated electronics, and automation control. Future research could further enhance the flexibility, actuation capacity, and self-sensing abilities of these flexible actuators by advancing molecular engineering, structural design, and actuation control technologies, ultimately leading to dual feedback closed-loop systems with superior work capacity and energy conversion efficiency.
Methods
Materials
1,4-Bis-[4-(3-acryloyloxypropyloxy) benzoyloxy]-2-methylbenzene (RM257) was purchased from Bidepharm. 1-ethyl-3-methylimidazolium bis(trifluoromethlysulfonyl)imide (EMIM TFSI), 1,3,3-trimethylindolino-6’-nitrobenzopyrylospiran (SP), 1,6-Hexanedithiol (HDT), and Pentaerythritol Tetra(3-mercaptopropionate) (PETMP) were purchased from Macklin. Dichloromethane was purchased from Sinopharm. Dipropyl amine (DPA) was purchased from Aladdin. All the reagents were used without further purification.
Synthesis of IonoLCE fibers
The ISLCEF precursor with 20 wt% IL and 1% wt% SP was prepared by dissolving 1.1772 g RM257 (monomer, 0.002 mol), 0.1503 g of HDT (chain extender, 0.001 mol), PETMP (crosslinker, 0.0005 mol) in 2 mL of dichloromethane. Then DPA (0.0506 g) was added as a catalyst to the above precursor. After shortly removing bubbles with ultrasonic treatment, the transparent precursor was slowly injected into a PTFE tube (the inner diameter is 1 mm). Firstly, polymerization proceeded for 5 h at room temperature and away from light. Secondly, the reactive ISLCEF was peeled from the tube and stretched to 40% strain for polymerization as well as the evaporating residual solvent for 24 h at room temperature and away from light. For IxS1.25LCEF with different IL contents (x refers to 0, 10, 20, 30, 40 wt%), the SP content was 1.25 wt% of monomers. For I20SyLCEF with different SP (0%, 1%, 1.25%, 1.5%, 1.75%, 2%), the IL content was 20 wt% of monomers. The pure LCEF without IL and SP, ILCEF (20 wt% IL) without SP, and SLCEF (1 wt% SP) without IL were prepared according to the above process, respectively.
Measurements and characterizations
The cross-section and surface morphologies of samples were observed using a scanning electron microscope (JEOL, IT300). The chemical structure and phase transition temperature were measured using a Fourier transform infrared spectroscopy (FTIR, Bruker, VERTEX 70) and a differential scanning calorimeter (DSC, NETZSCH, 204 F1) under nitrogen atmosphere. The thermal stability was performed via thermogravimetric analysis (TGA, HITACHI, STA300). The orientation was identified by a polarizing microscope (POM, Zeiss) and a small-angle X-ray scattering (SAXS, Anton Paar GmbH, Chengdu, UESTC). The strain changes were recorded via thermomechanical analyzer (Hitachi, TMA 7100) under a constant bias force (10 mN, 20 mN, 30 mN, 40 mN). The morphologies of ISLCEF under different strains were observed via a microscope (Leica, sa-190100). The electronic performances were measured using electrochemical workstation (CHI760E). The surface temperatures of samples were recorded using Fluke infrared imager (Ti-400). Tensile tests were carried out on a universal testing machine (INSTRON 5967, 0.0001N). The energy dissipation (ED) was calculated by \({ED}=\left|{A}_{L}-{A}_{U}\right|/{A}_{L}\), where \({A}_{L}\) and \({A}_{U}\) were the area under loading and unloading curves given a specific strain, respectively44.
Actuation performances of fiber actuator
The experimental setup for measuring actuation strokes is self-assembled (Supplementary Fig. S35) where the lengths of samples are recorded using an optical camera (Huawei Mate60Pro) under an environment with a fixed light source and load, and a relative stable thermal field was provided by a heat gun at a fixed distance. The RGB values of color were analyzed vis a photoshop. The actuation stroke was calculated by \(S=\frac{{L}_{0}-L}{{L}_{0}}\), Where \({L}_{0}\), \(L\) represent the initial length and the finial length at a constant thermal field and fixed test time, respectively, where the temperature field corresponds to the surface temperature of the sample recorded by Fluke infrared imager in real time to obtained temperature changes. The work capacity was measured under a fixed load (87 mN). Lengths at room temperature and a constant thermal field (about 65 °C) were denoted as \({L}_{1}\) and \({L}_{2}\). Work capacity was estimated as follows: \({\rm{Work\; capacity}}=\frac{{P}_{0}({L}_{1}-{L}_{2})}{{L}_{1}}\)45. At a constant thermal field, the actuation force was measured using a force sensor (INSTRON 5967, 0.0001N, 50N) at a fixed tensile strain of 100%. The self-assembled test platform for constructing a programmable thermal field is shown in Supplementary Fig. S36, where the electrically controlled programmable moving platform comes from the Multi-functional Flexible Bending Testing Instrument (FB-240).
Data availability
The data that support the fingdings of this stduy are available on request from the corresponding author, W. Z., upon reasonable request.
References
Agarwal, G., Besuchet, N., Audergon, B. & Paik, J. Stretchable materials for robust soft actuators towards assistive wearable devices. Sci. Rep. 6, 34224 (2016).
Hines, L., Petersen, K., Lum, G. Z. & Sitti, M. Soft actuators for small‐scale robotics. Adv. Mater. 29, 1603483 (2016).
Li, M., Pal, A., Aghakhani, A., Pena-Francesch, A. & Sitti, M. Soft actuators for real-world applications. Nat. Rev. Mater. 7, 235–249 (2021).
Miriyev, A., Stack, K. & Lipson, H. Soft material for soft actuators. Nat. Commun. 8, 596 (2017).
Rus, D. & Tolley, M. T. Design, fabrication and control of soft robots. Nature 521, 467–475 (2015).
Yang, Y., Wu, Y., Li, C., Yang, X. & Chen, W. Flexible actuators for soft robotics. Adv. Intell. Syst. 2, 1900077 (2019).
Yao, D. R., Kim, I., Yin, S. & Gao, W. Multimodal soft robotic actuation and locomotion. Adv. Mater. 36, 2308829 (2024).
Li, Y., Chen, Y., Ren, T., Li, Y. & Choi, S. H. Precharged pneumatic soft actuators and their applications to untethered soft robots. Soft Rob. 5, 567–575 (2018).
Qi, Y. et al. A pneumatic flexible linear actuator inspired by snake swallowing. Adv. Sci. 11, 2405051 (2024).
Yu, M. et al. A self-sensing soft pneumatic actuator with closed-Loop control for haptic feedback wearable devices. Mater. Des 223, 111149 (2022).
Guo, X. et al. Encoded sewing soft textile robots. Sci. Adv. 10, eadk3855 (2024).
Lalegani Dezaki, M., Bodaghi, M., Serjouei, A., Afazov, S. & Zolfagharian, A. Soft pneumatic actuators with controllable stiffness by bio‐inspired lattice chambers and fused deposition modeling 3D printing. Adv. Eng. Mater. 25, 2200797 (2023).
Yang, M. et al. Bioinspired and hierarchically textile‐structured soft actuators for healthcare wearables. Adv. Funct. Mater. 33, 2210351 (2022).
Gupta, U., Qin, L., Wang, Y., Godaba, H. & Zhu, J. Soft robots based on dielectric elastomer actuators: a review. Smart Mater. Struct. 28, 103002 (2019).
Qiu, Y., Zhang, E., Plamthottam, R. & Pei, Q. Dielectric elastomer artificial muscle: materials innovations and device explorations. Acc. Chem. Res. 52, 316–325 (2019).
Yang, L., Wang, H., Zhang, D., Yang, Y. & Leng, D. Large deformation, high energy density dielectric elastomer actuators: principles, factors, optimization, applications, and prospects. Chem. Eng. J. 489, 151402 (2024).
Zhang, C. et al. Repeatedly programmable liquid crystal dielectric elastomer with multimodal actuation. Adv. Mater. 36, 2313078 (2024).
Chen, Z. et al. Bio-inspired anisotropic hydrogels and their applications in soft actuators and robots. Matter 6, 3803–3837 (2023).
Liu, H. et al. Programmable water/light dual‐responsive hollow hydrogel fiber actuator for efficient desalination with anti‐salt accumulation. Adv. Funct. Mater. 33, 2302038 (2023).
Wei, X. et al. An electrospinning anisotropic hydrogel with remotely-controlled photo-responsive deformation and long-range navigation for synergist actuation. Chem. Eng. J. 433, 134258 (2022).
Jiang, Z.-C., Liu, Q., Xiao, Y.-Y. & Zhao, Y. Liquid crystal elastomers for actuation: a perspective on structure-property-function relation. Prog. Polym. Sci. 153, 101829 (2024).
Yao, M., Wu, B., Feng, X., Sun, S. & Wu, P. A highly robust ionotronic fiber with unprecedented mechanomodulation of ionic conduction. Adv. Mater. 33, 2103755 (2021).
Gotti, C., Sensini, A., Zucchelli, A., Carloni, R. & Focarete, M. L. Hierarchical fibrous structures for muscle‐inspired soft‐actuators: a review. Appl. Mater. Today 20, 100772 (2020).
Xiong, J., Chen, J. & Lee, P. S. Functional fibers and fabrics for soft robotics, wearables, and human-robot interface. Adv. Mater. 33, e2002640 (2021).
Tian, X. et al. Fiber actuators based on reversible thermal responsive liquid crystal elastomer. Small 20, 2306952 (2024).
Zhang, Z. et al. Recent advances in responsive liquid crystal elastomer‐contained fibrous composites. Respons. Mater. 2, e20240021 (2024).
Sun, J., Liao, W. & Yang, Z. Additive manufacturing of liquid crystal elastomer actuators based on knitting technology. Adv. Mater. 35, 2302706 (2023).
Wang, X. et al. Braided liquid crystal elastomer fiber actuator with programmable deformation for artificial muscles. Adv. Mater. Technol. 8, 2300814 (2023).
He, Q. et al. Electrospun liquid crystal elastomer microfiber actuator. Sci. Rob. 6, eabi9704 (2021).
Li, L. et al. Development of low-temperature driven high-strength interpenetrating polyurethane-liquid crystal elastomer actuators with self-sensing property. Sensor Actuat A Phys. 349, 114069 (2023).
Ambulo, C. P., Ford, M. J., Searles, K., Majidi, C. & Ware, T. H. 4D-printable liquid metal-liquid crystal elastomer composites. ACS Appl. Mater. Interfaces 13, 12805–12813 (2021).
Chen, Y. et al. Biomimetic artificial neuromuscular fiber bundles with built-in adaptive feedback. Matter 8, 101904 (2024).
Kotikian, A. et al. Innervated, self-sensing liquid crystal elastomer actuators with closed loop control. Adv. Mater. 33, 2101814 (2021).
Li, M. et al. Coaxial‐spun hollow liquid crystal elastomer fiber as a versatile platform for functional composites. Adv. Funct. Mater. 34, 2406847 (2024).
Liu, H. et al. Shape-programmable, deformation-locking, and self-sensing artificial muscle based on liquid crystal elastomer and low–melting point alloy. Sci. Adv. 8, eabn5722 (2022).
Zhang, X., Liao, W., Zhu, C. & Yang, Z. In situ programmable electrothermal actuation of liquid crystal elastomer fibers assisted by microfluidics. ACS Appl. Polym. Mater. 6, 11050–11056 (2024).
Liao, W. & Yang, Z. The integration of sensing and actuating based on a simple design fiber actuator towards intelligent soft robots. Adv. Mater. Technol. 7, 2101260 (2022).
Yu, R. et al. Octopus inspired hydrogel actuator with synergistic structural color and shape change. Adv. Mater. Interfaces 9, 2200401 (2022).
Zhang, P., Debije, M. G., De Haan, L. T. & Schenning, A. Pigmented structural color actuators fueled by near-infrared light. ACS Appl. Mater. Interfaces 14, 20093–20100 (2022).
Liu, Z. et al. Multifunctional ionic conductive anisotropic elastomers with self-wrinkling microstructures by in situ phase separation. ACS Appl. Mater. Interfaces 15, 28546–28554 (2023).
Wu, D. et al. Scalable functionalized liquid crystal elastomer fiber soft actuators with multi-stimulus responses and photoelectric conversion. Mater. Horiz. 10, 2587–2598 (2023).
Guofeng, Z. et al. Spiropyran-based molecular photoswitches. Chin. J. Org. Chem. 33, 927–942 (2013).
Xu, M. et al. Light and humidity dual-responsive anti-counterfeiting films based on hydrogen-bonded cholesteric liquid crystal polymers with spiropyran. ACS Appl. Mater. Interfaces 15, 58955–58966 (2023).
Shen, Z. et al. High‐stretchability, ultralow‐hysteresis conductingpolymer hydrogel strain sensors for soft machines. Adv. Mater. 34, 2203650 (2022).
Zhao, Y. et al. Antagonistic-contracting high-power photo-oscillators for multifunctional actuations. Nat. Mater. 24, 116–124 (2025).
Acknowledgements
We acknowledge funding support from the National Key Research and Development Program of China (2022YFB3805803), National Natural Science Foundation of China (52103063), Hubei Natural Science Foundation Project (2023AFB728), Shandong Provincial Science and Technology Department Small and Medium Enterprises Promotion Project (2024TSGC0657), Open Project of the Key Laboratory of Textile Fibers and Products, Ministry of Education (Fzxw2024012).
Author information
Authors and Affiliations
Contributions
X.M., conceptualization, investigation, formal analysis, visualization, writing- original draft. X.D., investigation, resources, visualization, funding acquisition. H.W., resources, data curation. J.L., validation, visualization. Y. K., methodology, resources. Y.L., resources, data Curation. J.L., resources, formal analysis. M.L., supervision, funding acquisition. Y.X., resources. T.Z., methodology, validation, formal analysis. W.Z., conceptualization, supervision, writing, review & editing, funding acquisition. All authors have read and approved the manuscript.
Corresponding authors
Ethics declarations
Competing interests
The authors declare no competing interests.
Additional information
Publisher’s note Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Supplementary information
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution-NonCommercial-NoDerivatives 4.0 International License, which permits any non-commercial use, sharing, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if you modified the licensed material. You do not have permission under this licence to share adapted material derived from this article or parts of it. The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by-nc-nd/4.0/.
About this article

Cite this article
Ming, X., Ding, X., Wang, H.M. et al. Biomimetic low-temperature contracting fiber for high stroke and controllable actuations. npj Flex Electron 9, 86 (2025). https://doi.org/10.1038/s41528-025-00466-9
Received:
Accepted:
Published:
Version of record:
DOI: https://doi.org/10.1038/s41528-025-00466-9
