
Abstract
Using an integrated watershed-coastal modeling framework, we conducted long-term historical simulations (1980-2019) of fluvial and coastal flooding in the Delaware Bay and River, a vulnerable estuarine system in the U.S., at high spatial resolutions. By applying process-based models, we generated physically consistent and spatially detailed estimates of estuarine, riverine, and surge-driven extreme water level compared to previous studies that used field data only. We then evaluated changes in the magnitude of flood events using the 40-year simulations and detrended Floodwater Depth values with stationary extreme value analysis. Our detailed assessment of spatial-varying extreme values revealed how different flood-generation mechanisms can dominate various zones in the estuary. The datasets produced through this work will be valuable for long-term flood hazard mitigation planning in coastal communities in the Delaware Bay and River region. Additionally, this work will serve as a benchmark for other coastal flood hazard modeling communities worldwide, aiding them in systematically modeling long-term and continuous extreme flood events.
Similar content being viewed by others
Background & Summary
Globally, coastal cities nowadays face increasing flood risks due to climate change, relative sea level rise, and changes in hurricane intensity and frequency1,2,3,4. Based on observations and model ensembles covering 5,000 coastal regions and major cities worldwide, Climate Impact Lab and the UNDP’s Human Development Report Office5 reported that by 2050, 5% of coastal city populations will be exposed to higher flood risk and the number could double by 2100 (nearly 73 million people), significantly affecting social and economic hubs and leading to global reversals in human development. Since the 1950s, flooding has increased in cities near the U.S. coastline, with the East and Gulf Coasts experiencing the largest increase in flood frequency6. Although storm surges pose a significant threat to human lives7, they can also cause various other damages, such as road closures, blocking of stormwater drainage and facilitation of pluvial flooding, loss of infrastructure and public services, environmental and economic impacts, and more8. For coastal cities in the U.S., these damages are particularly alarming, as there are nearly $1 trillion worth of property and structures, along with more than 40% of the population living near the coast9. Some of the notable extreme hurricane events in the last decade, Hurricane Maria (2017), Hurricane Harvey (2017), and Hurricane Ian (2022), caused an estimated $111.6B, $155.0B, and $116.3B worth of total damage, respectively10. This trend has continued with more recent events, including Hurricane Helene (2024) and Hurricane Milton (2024), which caused estimated damage of $78.7B and $34.7B, further emphasizing the increasing impact of extreme weather events11. Flood managers, decision makers, and planners often rely on extreme flood return levels [based on Annual Exceedance Probability (AEP)] to prepare for and respond to such disasters–ultimately to reduce the human, economic, and environmental impacts during extreme events worldwide12,13,14. Knowing the flood magnitude for different recurrence intervals, such as the 1-percent AEP or 100-year flood, helps manage risks to life and property, design infrastructure, plan insurance and finances, manage floodplains, ensure regulatory compliance, and more. In the United States, government agencies like the Federal Emergency Management Agency (FEMA15), U.S. Geological Survey (USGS12), and U.S. Army Corps of Engineers (USACE16), in addition to individual state agencies, use flood return level datasets to support their services related to flood risk management and decision-making processes.
Although the extreme flood return level is an essential variable for various agencies managing large coastal/estuarine regions, estimating its value using statistical methods is not trivial due to the recorded data’s lack of temporal and spatial coverage. For many coastal areas of the U.S. and worldwide, it is primarily projected using long-term water level observations from tide gauge locations, which are often sparsely distributed over a large region17,18,19,20. To address this issue, recent regional and global studies focused on coastlines have employed statistical methods like Regional Frequency Analysis21,22 and Bayesian Hierarchical Models23. These techniques provide spatial estimates of extreme sea levels in locations without tide gauges, utilizing the limited available data from real gauges. Simultaneously, various hydrodynamic modeling frameworks have been utilized over the last decade to accommodate many critical issues with using field data, such as gaps in continuous observation, insufficient data period, and unavailability in the place of interest24,25. Even though numerical models can significantly mitigate these limitations, the reliability of statistical estimates derived from model simulations depends on their accuracy, as well as spatial and temporal coverage. Therefore, to obtain more accurate estimates of extreme flood return levels in coastal and estuarine regions – which are affected by interacting coastal and river processes – an integrated high-resolution numerical modeling framework that can capture key physical and non-linear interactions between atmospheric, hydrologic, and hydrodynamic processes is essential.
In this work, we implement a combined deterministic and statistical modeling approach for estimating the spatial variation of extreme flood return levels in Delaware Bay and River (DBR), a large U.S. mid-Atlantic estuary (Fig. 1). The Delaware River Basin houses nearly 14.2 million people and annually contributes about $22 billion in economic activity to the region. The tidally-dominated estuarine portion of the basin, which also consists of a major U.S. city, Philadelphia, is highly vulnerable to flood hazards due to a combination of factors, including its converging (funnel-like) shape, the impacts of climate change, and the destructive hurricanes that make landfall or translates through the area26. This is also a critical region where interacting fluvial and coastal flood events can generate compound flooding27. These compound events are particularly challenging to predict, making integrated modeling framework applied in this work necessary for estimating extreme flood magnitudes.

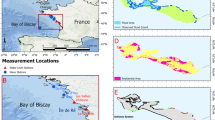
(a) Study area: Delaware Bay and River (DBR) in the U.S. Mid-Atlantic. The blue line represents the shoreline, and the green line represents the Delaware River Basin; (b) A zoomed-in view of the bay and river. The LandScan USA (2021) population density data (1-km resolution) and the distribution of the total county population are added to the map; (c) Map showing the channel thalweg transect and distance from the entrance of the bay, along with the National Oceanic and Atmospheric Administration (NOAA) tide gauge locations used for model validation.
To address these challenges, we integrate two high-resolution, physics-based models to simulate both riverine and coastal processes across the DBR. The Distributed Hydrology Soil Vegetation Model (DHSVM28) is used to simulate watershed hydrology and fluvial flooding, while the Finite Volume Community Ocean Model (FVCOM29) is used to model coastal hydrodynamics. Together, these models performed simulations from 1980 to 2019, enabling the assessment of various flood events over four decades. The continuous meteorological forcing for the historical climate is obtained from a dynamically downscaled ECMWF Reanalysis v5 (ERA5) dataset, called ‘WRF-TGW’30. After rigorous model calibration and validation, we estimated the changes to the magnitude of the Floodwater Depth [observed water level - the maximum predicted tide (each year)] over time using the 40-year continuous water level dataset and a Python-based stationary extreme value analysis tool called PyExtreme (link is provided in the Code availability section). Subsequently, two classical statistical methods: 1) Generalized Extreme Value distribution with Block Maxima fit31 (BM/GEV) and 2) Points-Over-Threshold fit to Generalized Pareto distribution31 (POT/GPD) are used to estimate the Floodwater Depth return levels. We implemented a step-by-step approach to verify the performance of these statistical methods in predicting Floodwater Depth magnitude for different recurrence intervals using observation and model data. Results show that the performance of these statistical methods is sensitive to the location of the estuary. The BM/GEV approach provides a better fit and smaller confidence interval near the open coast than POT/GPD, where the flooding is storm surge-dominated and less frequent. Conversely, the POT/GPD approach performs better in the river portion, with frequent fluvial flooding and much more significant data points. We generated return value estimates for different recurrence intervals along with the 95% confidence intervals for the entire study area using both methods. Providing results from both approaches allows users to evaluate how the choice of method impacts the estimates’ magnitude and uncertainty. This flexibility helps users select the appropriate method for their specific needs, such as infrastructure design, flood risk assessment, or policy development, while considering the statistical properties of the data, such as record length and frequency of flood events. It will also be a valuable dataset for the flood management communities in DBR because of its extensive spatial coverage and high resolution compared to traditional estimates based on single-point tide gauge datasets. Additionally, a dataset of simulated water levels and extreme flood return levels could help understand the distribution, trend, and variability of different flood processes over the long term. Ultimately, such a flood dataset can capture fundamental human-natural system dynamics and help simulate time-evolving risks within the region.
Methods
Methods overview
At the onset, we collected the dynamically downscaled atmospheric re-analysis data that covers 40 years (1980 to 2019) from the WRF-TGW dataset to provide continuous meteorological forcing for the higher-resolution hydrology and hydrodynamic models. We demonstrate this process in Fig. 2, where the hydrological processes are simulated first using DHSVM to provide river forcing for the hydrodynamic model. Then, FVCOM uses the river forcing, the meteorological forcing from WRF-TGW, and water surface elevation at the open ocean boundary to provide continuous 40-year water level data for the entire model domain covering DBR. The links for obtaining both these models are provided in the Code availability section. The outputs from both DHSVM and FVCOM models underwent extensive validation against observed datasets to evaluate model skills before their application in further analysis. Following model validation, we identified continuous Floodwater Depth magnitudes using data detrending, tide averaging, and tidal harmonic analysis on the full simulation period. The second phase of the study focuses on characterizing extremes through statistical modeling. Specifically, we implement two well-established extreme value approaches, (a) BM/GEV and (b) POT/GPD, to estimate return levels of Floodwater Depth across the entire region. These methods are detailed in the subsections that follow.

Sketch showing the process of data collection, model input file preparation, hydrodynamic model result post-processing, and finally using the dataset for statistical analysis and extreme water return level estimates.
Atmospheric reanalysis data from 1980 to 2019 (WRF-TGW)
To explore the potential impact of climate change on weather patterns, the Department of Energy’s IM3 and HyperFACETS projects have developed an atmospheric dataset called WRF-TGW30. This dataset covers the Continental United States (CONUS), northern Mexico, and southern Canada. We use the 40-year sequence of past weather from 1980 to 2019, which is the European Centre for Medium-Range Weather Forecasts Reanalysis v5 (ECMWF ERA5) data (30 km resolution), dynamically downscaled with the Weather Research and Forecasting (WRF) model to achieve a horizontal resolution of approximately 12 km. This higher resolution is crucial for resolving flood processes in complex estuarine regions as it captures regional atmospheric processes at finer scales such as extreme event precipitation and wind fields26. In addition to the finer resolution, the WRF-TGW dataset domain extends approximately 700 km offshore from the US Mid-Atlantic coastline (shown in Fig. 3), providing a reasonable area coverage for representing the hurricane field that affected the DBR. We use this historical reanalysis data to simulate the sequence of flood events from 1980 to 2019. To verify the skill of this dataset, we collected wind speed data from multiple near-shore National Data Buoy Center (NDBC) buoys during Hurricane Irene (2011) and Hurricane Sandy (2012) and observed a good agreement between the downscaled data and the field observation. From this dataset, we utilized temperature, precipitation, wind speed, relative humidity, and downward short-wave and long-wave radiation at ground level to force DHSVM, along with wind velocity at 10 meters and sea surface pressure as surface forcing for FVCOM.

Atmospheric dataset ‘WRF-TGW’ domain covering the Continental United States. The colormap represent the 10-m elevation wind speed during Hurricane Irene (2011) landfall in the U.S. Mid-Atlantic; The top subplot shows the hydrology (DHSVM) and hydrodynamic (FVCOM) model domains.
Numerical models for riverine and coastal flood modeling
DHSVM
DHSVM is a hydrological model that simulates key overland and subsurface processes by explicitly representing climate, soil, and vegetation at the grid cell level. It is a physics-based, spatially distributed hydrological model where it solves the full energy and water balance equations. The model comprises several components, including a two-layer canopy model for evapotranspiration, a two-layer snowpack model for snow accumulation and melt, a multi-layer unsaturated soil model that moves infiltrated water vertically based on Darcy’s law, and a saturated subsurface flow routing model that uses a transient quasi three-dimensional model. The excess surface runoff and intercepted subsurface flow routes through the stream network to the watershed outlet, and the channel flow conveyance uses segments of linear reservoirs. More information about model physics and formulations is detailed in the existing literature28,32,33. For this study, DHSVM was configured for the Delaware River Basin at a 90-m spatial resolution. In addition to meteorological inputs from WRF-TGW, key geospatial inputs for DHSVM include digital elevation model (DEM), vegetation data from USGS National Land Cover Database, and soil data from U.S. Department of Agriculture (USDA) National Resources Conservation Service State Soil Geographic (STATSGO), all resampled to a 90-m grid resolution. A pre-processing tool was used to generate the Delaware River network based on DEM, resulting in 6225 river segments across the Delaware River network. For each river segment, DHSVM generated outputs of river discharge at a 3-hourly timestep. The river forcing used by FVCOM includes 13 reaches at the river-ocean interface (i.e., DHSVM-FVCOM domain), with the major ones being the Schuylkill and Delaware mainstem near Trenton, NJ.
FVCOM
Using atmospheric forcing from the WRF-TGW dataset and river forcing from DHSVM, we simulate the water surface elevation (WSE) using unstructured grid FVCOM29. It is extensively used to model storm surges and flooding in many estuarine and coastal regions, especially with complex bathymetry, tidal wetting and drying, and irregular coastlines27,34,35,36. In this work, considering the computational demand for continuous long-term simulations, we chose the 3D barotropic and hydrostatic version, which resolves simplified Reynolds-averaged Navier-Stokes equations (with Boussinesq approximations), where an external mode solves 2D depth-integrated equations and the internal mode solves the equations in three dimensions.
The model domain extends ~700 km offshore from the mid-Atlantic coast to adequately capture the air-sea interaction during hurricane landfalls (Fig. 3) and ~215 km from the Delaware Bay mouth to the river flow boundary (Fig. 1c). It also extends landward on the eastern and western shores of DBR, up to a floodplain boundary of 3 m elevation above the North American Vertical Datum of 1988 (NAVD88), to correctly resolve the inundation of low-lying Delaware and New Jersey floodplains. We collect the topographic and bathymetric data from a combination of National Oceanic and Atmospheric Administration (NOAA) DEM sources such as the 1-arc-minute Earth TOPOgraphy (ETOPO1) and 1/9-arc-seconds Coastal Relief Models, and use the Surface Water Modeling software (SMS) version 13.0 to generate the model grid. The pre-defined size function assigned for different parts of the study area (e.g., tidal river, bay, and open ocean) provided a varying horizontal resolution from ~30 km along the open ocean boundary to 30 m in the upstream and narrowest portion of the Delaware River, providing a reasonable number of 219k triangle elements and 116.5k nodes considering the period of model simulation. To represent the tidal forcing and sea-level trend at the open boundary, we used the ADvanced CIRCulation (ADCIRC) model ec2001 tidal database37,38 and the observed historical sea-level trend from NOAA’s Center for Satellite Applications and Research (STAR) repository39. They are combined to provide the total water level at the boundary, which is necessary for taking care of the temporal and spatial evolution of the sea level within our study area. Then, from the hundreds of DHSVM streams with outlets near the Delaware River, we picked 13 major streams with a 99.5th percentile of peak flow above 100 m3/s, which significantly contributed to overall flooding during extreme events. Limiting the number of narrow streams that require much higher resolution helped increase the model external time-stepping – a critical factor in this work due to the long simulation period. With the assigned model setup and configuration, the continuous 40-year model run required ~1.1 × 106 CPU hours with Intel Xeon Haswell processor nodes in the National Energy Research Scientific Computing Center (NERSC) CORI supercomputing system. We used four nodes, each consisting of 64 processors (a total of 256 processors).
Tidal analysis and Floodwater Depth estimate
In estuaries experiencing semi-diurnal and spring/neap tides, identifying flood events caused by storm surges can be challenging due to the timing of surges relative to the tidal stage. Many studies have directly used the time series of total water level (TWL) from a specific datum to represent surge-driven flooding. Some have used non-tidal residual40 (NTR; the difference between TWL and predicted tide), while others used skew surge41 (a measure of the difference between the maximum TWL and the maximum predicted tidal level during a tidal cycle), allowing an offset of recorded and predicted tidal peaks (i.e., skewed) from each other. While both these terms, NTR and skew surge, estimate the impact of meteorologically forced surges on water level during extreme events, they might not always represent flooding in a tidal estuary or river. In the existing literature, hourly NTR is a standard measure of storm surge that includes non-linear interactions between tide, river discharge, and low-frequency surge42,43. However, NTR, as a proxy for flooding, could have higher uncertainties as the maximum NTR might not always occur during the predicted peak high tide. A large NTR occurring during low/ebb tide, compared to a small NTR during high tide, does not necessarily indicate more severe flooding. Recent studies have utilized skew surge, which is uninfluenced by the tidal phase but measures the difference between the predicted and recorded water level peaks during the same tide cycle19. Even with the additional adjustments, the skew surge might mislead the estimate of flooding during spring-neap variations in tidal estuaries. For example, a higher skew surge during a neap tide cycle would not necessarily mean the exact extent of overland flooding compared to a spring cycle. Thus, in this work, we identify flooding or flood events by measuring a difference between the TWL and peak tide (hereafter called ‘Floodwater Depth’) where we estimate the peak tidal elevation over a much more extended period of 1 year (shown in Fig. 4).

Sketch showing the peak spring tide/king tide and Floodwater Depth estimates from the North American Vertical Datum of 1988 (NAVD88) in estuarine channels. We estimate this ‘Floodwater Depth’ by subtracting the yearly peak tidal elevation (king tide) from the total water level.
The Floodwater Depth provides a straightforward representation of coastal flooding by assuming that the yearly peak tidal elevation (king tide) does not represent flood, and the water level surpasses that elevation can potentially represent a flood depth that also overtop the river banks. This estimate is also better than directly using the TWL for EVA models as it allows us to differentiate between the peak tidal elevation and the storm-induced flooding, which is essential for long-term planning and management. It also eliminates the threshold selection for the extreme value analysis using POT/GPD analysis, which is critical for return level estimates. Here, by default, the spatially varying peak tidal elevation becomes the threshold choice of the high water from which we assume that the overland flood begins. We want to note that while our Floodwater Depth metric represents a storm-induced water depth along the bay and river, it is not equivalent to the flood warning threshold used by the National Weather Service for hazard and impact assessments44, which is based on the depth of inundation over land.
The process of estimating the Floodwater Depth is shown in Fig. 5 where we separate the TWL signal into tidal and non-tidal parts, estimate the annual peak tidal elevation considering the sea level trend, and finally extract the time series of the Floodwater Depth. We first applied this method to the observation datasets collected from the NOAA Tides and Currents database (https://tidesandcurrents.noaa.gov/). Within our study area, ten tide gauge locations have historical water level datasets of different periods and are currently in service. However, only six gauge locations, Lewes (LW), Brandywine Shoal Light (BSL), Ship John Shoal (SJS), Reedy Point (RP), Philadelphia (PHL), and Newbold (NB), have measurements for an extended period and represent different regions of the estuary – progressively going from the bay mouth to the upstream river (Fig. 1c). They also have different time resolutions, such as 6-min intervals, hourly, and high/low per tide cycle (six-hourly). For this study, first we collected hourly data for 2011 from the six gauges that had continuous measurements without any missing periods to do the tidal analysis. We used this hourly record for harmonic analysis and finding peak tidal elevations. Later, we compared these datasets with model results for the same period and provided an estimate of the model bias in predicting peak tidal elevations. Before continuing with model results for extreme value analysis and return level estimates, we verified model performance in predicting the isolated extreme event TWL. When looking at the most important events for the study region41, all of our gauge locations consisted of hourly TWL data for Hurricane Isabel (2003), Wilma (2005), Ernesto (2006), Irene (2011), and Sandy (2012). While it is possible to obtain TWL data for additional historical events, most gauges record six-hourly data with irregular gaps, and have less than 40 years of records, except for LW and RP. This gap also prevented us from calculating return levels at most field locations except RP, limiting our evaluation of the numerical model’s performance for statistical estimates to only the RP tide gauge.

Example plot showing the estimation of Floodwater Depth from the total water level time series data. (a) Time series of Total Water Level (TWL) at Ship John Shoal, NJ, NOAA tide gauge; (b) Pure tidal oscillation after removing the long-term trend and subtidal signals from TWL and using harmonic analysis. The dashed line represents the peak tidal elevation; (c) Time series of Floodwater Depth after removing the peak tidal elevation from TWL. Here, the green circles represent the peak Floodwater Depth events selected based on the POT/GPD threshold of 0.05 m and a declustering time of 3 days for event independence.
Before using the TWL data for any statistical analysis, the dataset was detrended to make it independent and stationary to represent the random process. This step is crucial for extreme value analysis, where the assumption is that the distribution of any sample subset remains the same17,31. However, in coastal or estuarine systems, TWL time series can contain significant trends due to the increase in the sea level over time or periodicity from the seasonal or long-term oscillations of the open ocean. It is thus necessary to remove the trend or periodicity from the signal to ensure that the mean and standard deviation of the process remain unchanged over time, thereby maintaining the assumption of stationarity. In this study, we first implemented a tide/wave averaging approach that removes the long-term trend and subtidal signals from TWL. Then, we conducted a harmonic analysis using tidal analysis software, ‘t-tide,’ to get the purely tidal oscillation for each year (tool link is available in the Code availability section). To get the peak tidal elevation for any part of the estuary, we superimposed the long-term trend with the tidal signal and located the annual peak elevations over 40 years. We used Matlab’s ‘detrend’ function to get the signal trend, which performs a linear fit to the time-series data and separates the trend (for more details see the link provided in the Code availability section). This analysis gave us the peak tidal elevations for the entire study region, which we then used to calculate the Floodwater Depth. Finally, combining the peak tidal elevation and the Floodwater Depth magnitude for different recurrence intervals, we generated the stillwater elevation dataset - commonly used by FEMA for flood risk mapping and assessment.
Extreme value analysis and Floodwater Depth Return Levels
Extreme Value Analysis (EVA) is a statistical field that explores and models the likelihood of rare and severe events, such as extreme rainfall, storm surges, and wave heights. These events usually occur at the extreme ends—so called “tails"—of probability distributions and can have significant consequences in hydrology, coastal science, and climate science. Various statistical distributions are used to analyze extreme values within a time series, including Generalized Extreme Value (GEV), encompassing the Extreme Value Type I (Gumbel), Type II (Fréchet), and Type III (Reverse Weibull) distributions, the Pearson and Log-Pearson Type III, Generalized Pareto Distribution (GPD), and Lognormal Distributions (for an overview, see Merz et al.45). These time series may represent either a sequence of maximum values occurring within equal time intervals (such as months or years) or encompass all values exceeding a specified extreme threshold. The process involves fitting different analytical functions to the data to select the most suitable function to represent the distribution of extreme values. In coastal studies focusing on US coastlines, many methods have been applied to perform EVA on TWL46,47,48,49,50. Among them, GEV and GPD have been most frequently applied to estimate return levels and periods of extreme water levels from coastal ocean datasets.
The GEV distribution is commonly used to fit the maximum values of non-overlapping blocks within a time series when the events are assumed to be independent. This method is called the Block Maxima (BM) approach and is often used to characterize annual maximum values. On the other hand, the GPD is used to fit the upper tail of the parent distribution. This tail comprises values exceeding a certain threshold, referred to as the Peaks-Over-Threshold (POT) or Partial Duration Series method51,52. Like the BM method, the POT method assumes the events are independent. Although POT provides a more straightforward representation of extreme values than BM, it is essential to note that the temporal clustering of data points and the subjective selection of a threshold can introduce complexities in the analysis31. While both the GEV and GPD distributions are characterized by three parameters—location, scale, and shape—the GPD uses a threshold value in place of the location parameter. This threshold is not an additional parameter but rather specifies the minimum value for which the GPD is applicable, essentially defining the starting point of the tail distribution that the GPD models.
The cumulative distribution function (CDF) of the GEV distribution consists of three families, and they can be written as:
For ξ = 0 (Gumbel):
For ξ < 0 (Weibull) and ξ > 0 (Fréchet):
where μ, σ, and ξ are the location, scale, and shape parameters, respectively. The Weibull distribution has a lower chance of including a value significantly greater than μ. The Gumbel distribution is considered a light-tailed distribution, while the Fréchet distribution is known as a heavy-tailed distribution because it is more likely to include a value much larger than μ.
The CDF of GPD, the second approach, can be defined as:
For ξ ≠ 0 :
For ξ = 0 :
where μ is the threshold, σ is the threshold-dependent scale parameter (>0), and ξ is the shape parameter.
In EVA, various methods are commonly employed to estimate scale and shape parameters, such as Maximum Likelihood Estimation (MLE), Method of Moments, L-moments53, and Probability-Weighted Moments (PWM)54. MLE is often preferred for its general applicability and efficiency in estimating the unknown parameters of a distribution31. Subsequently, the confidence intervals for the estimated parameters can be calculated using the bootstrap Monte Carlo method. In this work, we used ‘pyextremes’ to efficiently perform EVA with large datasets. This toolbox has options for GEV, GPD, and the MLE method to fit the models. To get the extreme Floodwater Depth, we used the annual maxima for BM/GEV, and for POT/GPD, we assumed a declustering time of 3 days for event independence.
Data Records
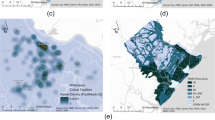
The Floodwater Depth and stillwater elevation return levels are accessible to the public via the MSDlive repository: https://doi.org/10.57931/235082655. Table 1 describes all the files representative of flood processes and those used for model evaluation, including their structure and dimensions. The large files are mainly kept in MatLab (.mat) formats, and essential return level values are given in Microsoft Excel (.xslx) formats for easier access. The raw water surface elevation data from the model is also provided, allowing user to estimate return levels from scratch. Using these datasets, users can produce stillwater elevation maps for different return periods, as shown in Figs. 6 and 7 and the along-channel return level variations shown in Fig. 8. Figures 6 and 7 illustrate how the return levels vary spatially along the channel, showing greater amplification near PHL and in the section of the river extending to Trenton, NJ. In these plots, we also added the 1-km resolution LandScan USA (2021) population density data (https://landscan.ornl.gov/) on top of the background map to illustrate where the Floodwater Depth may have a greater impact in the region. More discussion about the non-linear interaction between tide, surge, river discharge, and the complex geometry and their effects on flood amplification and dampening is given in Deb et al.27.

2D map of the 100-year extreme flood return level using BM/GEV. Here, this return level represents the stillwater elevation (in meters, from NAVD88) by combining the 100-year flood water depth and peak tidal elevation at model grid nodes that cover the bay/channel water body. The LandScan USA (2021) population density data (1-km resolution) is added on top of the background map.

2D map of the 100-year extreme flood return level using POT/GPD. The return level represents the stillwater elevation (in meters, from NAVD88) combining the 100-year flood water depth and peak tidal elevation at model grid nodes that cover the bay/channel water body. The LandScan USA (2021) population density data (1-km resolution) is added on top of the background map.

(a,c) Along-channel (from bay entrance to the upstream model river boundary) 50-year stillwater elevation return levels with 95% confidence interval for both BM/GEV and POT/GPD; (b,d) Along-channel 100-year stillwater elevation return levels with 95% confidence interval for both BM/GEV and POT/GPD.
Technical Validation
Hydrodynamic model performance
To ensure the technical quality and reliability of the dataset, we performed rigorous model comparisons with the available observation data for both DHSVM and FVCOM models. The DHSVM simulations of river discharge within the Delaware River basin have been thoroughly evaluated in prior studies, as documented by Sun et al.56 and Cooper et al.57. For example, the Kling-Gupta Efficiency (KGE; Equation (5)) for daily flows, when compared against long-term (mostly over 30 years) observations collected from six United States Geological Survey (USGS) along the Delaware mainstem, ranged from 0.6 to 0.73; a KGE of 1 indicates perfect prediction. Despite the favorable KGE scores, the DHSVM simulations introduce biases that are propagated into the FVCOM TWL simulations through the coupling process.
Where R is the linear correlation coefficient, σo is the standard deviation in observations, σm is the standard deviation in simulations, μm is the simulation mean, and μo is the observation mean.
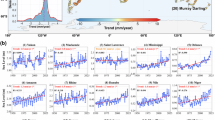
As this study mainly focuses on predicting the extreme water level in the estuary and river, we prioritized to address the biases or errors in the FVCOM-generated water level dataset. We separated the model assessment into three parts that can progressively and systematically display the error generation. At first, we compared TWL at various NOAA gauge locations during extreme events that extensively affected the area and during which the gauges continuously recorded the TWL. Figure 9 shows the comparison between the field and model during five extreme events: Hurricane Sandy (2012), Wilma (2005), Isabel (2003), Ernesto (2006), and Irene (2011), which had the most impact in the study area among various other events. In this plot, different parts of the estuary are represented by the location of the subplot (e.g., rows), starting from Delaware Bay (LW) at the bottom and ending at the upstream portion of the Delaware River (NB). DBR is a complex, shallow, and convergent system where the tidal amplitude initially reduces due to frictional dissipation and then slowly increases again as the estuary width narrows with distance and the incident wave interacts with the reflected wave in the tidal river (More discussion provided in Deb et al.27). This phenomenon can be seen in Fig. 9; as the storm wave propagates upstream, the peak of water surface elevation increases with distance. In the river-estuary interaction zone (NB to RP), river discharge from extreme event precipitation also elevates the sea level while damping the tidal amplitude [water level at NB during Hurricane Irene (2011) shown in Fig. 9]. Spatial variations in biases from atmospheric and river forcing inputs, combined with spatially varying hydrodynamic processes, lead to spatial differences in model performance in predicting TWL. We calculated three commonly used model performance metrics (Table 2) in the coastal modeling community: Correlation coefficient, Averaged bias index, and Skill (equations (6)–(8)), using WSE records from six tide gauge locations during five extreme events. The metrics, averaged across all events for each gauge, are detailed in Table 1. We can see that the Correlation coefficient and Skill range from ~0.91–0.97 and ~0.91–0.94, respectively. These values indicate strong agreement with observations, where 1.0 represents complete agreement. However, the Averaged bias index shows that the model underpredicts WSE progressively from upstream/river (NB) to downstream/bay entrance (LW) location, where the maximum difference reaches ~0.18 m.

Comparison of model and observed water levels during five major storm events at different NOAA tide gauge locations. The vertical subplots, arranged from top to bottom, illustrate a gradual change in the properties of the tidal systems, transitioning from river portion (Newbold, NJ) to the bay entrance (Lewes, DE).
As mentioned earlier in section Tidal analysis and Floodwater Depth estimate 0.0.2, in this work, we are separating the WSE into two parts: the peak tidal elevation and Floodwater Depth. Hence, comparing the model-predicted tidal constituent amplitude with observation is essential before analyzing the return levels of Floodwater Depth. Tidal constituents are the individual harmonic components that collectively define the tidal signal, each corresponding to a specific astronomical or gravitational cycle. For example, the M2 constituent represents the principal lunar semidiurnal tide, while S2 reflects the solar semidiurnal influence. In Table 3, we provided the FVCOM model-predicted amplitude of the major tidal constituents and their difference with the field data at the tide gauges in DBR, using the continuous yearly dataset of 2011 (as mentioned earier, the year 2011 is chosen due to data availablity at all gauges). The semi-diurnal constituents (M2, N2, and S2) primarily dominate this region, and we observe that the principal lunar semidiurnal constituent (M2) has the largest amplitude in all of the gauges. The amplitude error gradually increases from LW to NB, where the model underpredicts the M2 amplitude by ~0.19 m at NB. To achieve higher accuracy in the river-dominated portion of DBR, it is essential to represent small channels, tributaries, and floodplains with higher resolution, which is challenging considering the computational expense required for a long-term 40-year simulation. Based on this assessment, we suggest that users of this dataset take into account these errors when interpreting the data.
Where Mn and On are simulated and observed water levels, N is the total number of observations used in metric calculations, and \(\overline{O}\) is the mean of observed sample N.
Verification of the parametric (EVA) models
In this section, we evaluate the goodness of fit of the parametric models against the empirical distribution derived from observed data. This assessment employs both qualitative and quantitative methods. Alongside graphical techniques such as Q-Q and P-P plots, we conducted two-sided Kolmogorov-Smirnov (KS) tests using field gauge data and datasets generated by the FVCOM model. These tests are essential for determining whether the GEV and GPD distributions adequately represent the Floodwater Depth return values. Additionally, we calculated the Root Mean Square Error (RMSE) between the empirical and theoretical cumulative distribution functions (CDFs). We structured our analysis into two segments. The first segment compares the performance of the BM/GEV and POT/GPD models in predicting CDFs at Reedy Point, DE (RP) based on field gauge and FVCOM data, as shown in Figs. 10 and 11. The error metrics from this comparison provide a quantitative assessment of model performance. The second segment presents a side-by-side comparison of return value estimates at the same location (Figs. 12 and 13).

(a) Comparison of cumulative distribution functions (CDFs) derived from empirical (observed) data and Generalized Extreme Value (GEV) estimates, based on the field gauge annual maxima of Floodwater Depth; (b) Probability-Probability (P-P) plot comparing the cumulative probability of empirical data with the fitted GEV distribution; (c) Quantile-Quantile (Q-Q) plot comparing the quantiles of empirical data with those from the fitted GEV distribution; (d,e,f) Corresponding CDF, P-P, and Q-Q plot comparisons for the Peaks over Threshold (POT) and Generalized Pareto Distribution (GPD).

(a) Comparison of cumulative distribution functions (CDFs) derived from empirical (observed) data and Generalized Extreme Value (GEV) estimates, based on the FVCOM model-generated Floodwater Depth data; (b) Probability-Probability (P-P) plot comparing the cumulative probability of empirical data with the fitted GEV distribution; (c) Quantile-Quantile (Q-Q) plot comparing the quantiles of empirical data with those from the fitted GEV distribution; (d, e, f) Corresponding CDF, P-P, and Q-Q plot comparisons for the Peaks over Threshold (POT) and Generalized Pareto Distribution (GPD).

(a) Annual maxima of Floodwater Depth from 40-year period field dataset at Reedy Point, DE; (b) Annual maxima of Floodwater Depth from 40-year period model dataset at Reedy Point, DE;; (c) return value estimate and probability distribution function (PDF) of the Floodwater Depth using BM/GEV based on field data; (d) return value estimate and PDF of the Floodwater Depth using BM/GEV based on model data.

(a) Extreme events selected using a Floodwater Depth threshold of 5 cm (over peak tidal elevation) from 40-year period field dataset at Reedy Point, DE; (b) Extreme events selected using the model dataset; (c) return value estimate and probability distribution function (PDF) of the Floodwater Depth using POT/GPD based on field data; (d) return value estimate and PDF of the Floodwater Depth using POT/GPD based on model data.
For Floodwater Depth derived from field tide gauge data, the GEV model yielded a KS statistic of 0.07, an RMSE of 0.017, and a p-value of 0.97 (p > 0.05), indicating an excellent fit. Similarly, the GPD model produced a KS statistic of 0.02, an RMSE of 0.05, and a p-value of 0.94. When the same analysis was applied to Floodwater Depth estimates generated by the FVCOM model at the same gauge, the GEV model resulted in a KS statistic of 0.10, an RMSE of 0.04, and a p-value of 0.77, while the GPD model produced a KS statistic of 0.02, an RMSE of 0.05, and a p-value of 0.6. Overall, the results demonstrate that both the GEV and GPD distributions provide a robust fit to the observed data from both field measurements and FVCOM simulations. The CDF, Q-Q, and P-P plots (Figs. 10 and 11) further provide a qualitative assessment of goodness-of-fit between the empirical data and the fitted extreme value distributions. While both models align well with empirical distributions, larger deviations are observed in the tail region, particularly for quantiles based on the GPD and model-generated Floodwater Depth data. This visual assessment, coupled with the KS test results and RMSE values, confirms that the selected extreme value distributions effectively characterize the Floodwater Depth return levels.
After evaluating the parametric model performance, we estimated the Floodwater Depth return values for different periods (10, 25, 50, and 100) at the same site, RP. From Fig. 12a,b, we can see that there are more flood events in the field observations compared to model simulations; however, using the BM/GEV approach and selecting only the annual maxima (40 peaks), the pdf and the return levels estimated using both field and model data show comparable values (Fig. 12c,d). In Table 4, we also quantified the differences between return level estimates by BM/GEV. We observed that the model overestimates the 10, 25, 50, and 100-year return levels, where the error progressively increases from 0.09 m to 0.19 m. We want to point out that these estimates contradict the model’s tendency to underestimate total water levels during extreme events, as demonstrated in Table 2. In that table, we quantified error metrics such as bias, skill, and the correlation coefficient (R) based on hourly data collected over extended storm periods. These metrics reflect the model’s overall performance across the storm period, including flood and ebb phases, rather than focusing solely on the peak values. In Table 3, we further demonstrate that the model tends to underpredict tidal amplitudes, contributing to the overall negative bias during storm periods. However, when we isolate the maximum Floodwater Depth during storm periods – specifically, the peak values used in the return level analysis – the model overpredicts these peaks most of the time. Since the return level estimation relies on peak Floodwater Depth, we see the overestimation of extreme values in the return level estimates, even though the overall time series is biased low. The 95% confidence interval estimated from both datasets show a very similar range (shown in Fig. 12c,d); we provided the Floodwater Depth return level and 95% confidence interval limit for 10, 25, 50, and 100-year events in the dataset shared in the repository. For a similar comparison using the POT/GPD, in Fig. 13a,b, we clearly see that our long-term model simulation misses many smaller flood events at Reedy Point, DE, which lies in an estuary-river interaction zone. Even though the pdf shows a nearly similar distribution between field and model data (Fig. 13c,d), the lower sample size from the model simulation results in a larger 95% confidence interval as the return period increases. Overall, the difference in return level estimates using POT/GPD is greater compared to using BM/GEV (Table 4). For instance, for a 100-year event, the model data overpredicts the return level by 0.88 m with POT/GPD and by 0.19 m with BM/GEV.
Then, we compared the performance of the BM/GEV and POT/GPD models using FVCOM data at two other locations along the estuary, Newbold, NJ (NB) and Ship John Shoal, NJ (SJS), to evaluate how the statistical estimates, mainly the goodness of fit, return values and the probability distribution function can vary across different parts of the estuary (Figs. 14 and 15). Our study area is a complex region where the statistical estimates could vary based on the location and frequency of flood events, which are uniquely dominated by surge and fluvial discharge. The P-P and Q-Q plots in Fig. 14 supports our prior statement about the strength and weakness of these two EVA methods in estuarine extreme flood estimates. The theoretical distribution from BM/GEV, mainly the expected quantiles, shows a slightly better agreement with the empirical estimates compared to POT/GPD at SJS. Selecting model data progressively from the bay entrance to the upstream river increased the flood frequency for POT/GPD; however, it produced higher return values and wider confidence intervals compared to BM/GEV. At the same time, because of a small sample size of Floodwater Depth in the bay, both models have higher confidence intervals for large return periods (>25 years) while the range is smaller for the BM/GEV estimate. We provided a quantitative assessment of the return level difference between these two approaches at Newbold, NJ (NB) and Ship John Shoal, NJ (SJS) in Table 5. This comparison shows that although they both predict a nearly similar value for more frequent extremes, POT/GPD generates much larger return levels for 50- and 100-year events in both parts of the estuary, and users should be cautious about the uncertainties from both these statistical models.

Comparison of the BM/GEV and POT/GPD model quality (based on FVCOM model data) using P-P and Q-Q plots in different parts of the estuary, Newbold, NJ, and Ship John Shoal, NJ.

Comparison of return value estimate and probability distribution function of the Floodwater Depth using BM/GEV and POT/GPD (based on model data) in different parts of the estuary, Newbold, NJ, and Ship John Shoal, NJ.
Usage Notes
The exceedance probability of Floodwater Depth and stillwater elevation (combining Floodwater Depth with peak tidal elevation), provided in the MSDlive repository55, can be valuable for various coastal decision-making applications. This data can help coastal planners and managers assess flood hazards and make informed decisions. In estuarine systems like DBR, where storm surge and river discharge can have varying impacts, this dataset is crucial for local management, especially in areas such as the bay region (characterized by low population density and rich natural systems like wetlands) and the urban environment (with higher population density in the City of Philadelphia). The multi-decadal time series of TWL and Floodwater Depth can assist stakeholders in understanding the dynamics and patterns of flooding. The estimate of stillwater elevation return levels can help create flood insurance maps and design coastal infrastructure, including housing, transportation, water and wastewater systems, electrical grids, storm protection structures, marsh restoration projects, and floodplain management. The dataset addresses a significant gap in the spatial availability of field data by providing high-resolution spatial information essential for assessing flood risk in urban areas like Philadelphia, where tidal influences and river flows converge. For example, the TWL time series from this dataset can be used as coastal forcing at the coastal-urban interface for urban flood modeling focused on the City of Philadelphia. The strength of the coupled high-resolution, process-based model used in this study is that it provides a more reliable prediction of coastal flooding - especially for the zones where complex flood dynamics are challenging to predict with large-scale coastal models or coastal models forced by sparse observations from gauges.
Furthermore, other researchers and engineers can utilize this dataset to model wave hazards, wetland and floodplain erosion, population dynamics, and risk assessment. It can also contribute to understanding long-term changes in estuarine dynamics, including the impact of sea-level rise on tidal processes throughout the entire system (bay and river). A comprehensive analysis involving sea-level rise, long-term climate forcings, and continuous fluvial and estuarine flooding could provide valuable insights into the influence of climate change on extreme flood events.
Despite its various usefulness, the dataset also has a few limitations that we need to acknowledge:
-
1.
The model underpredicts peak TWL during extreme events by varying magnitudes at different parts of the estuary. Especially near the bay entrance and close to the shoreline (Lewes, DE), we observed an averaged model bias of −0.18 m. As we looked close to the river portion of the study area (e.g., Newbold, NJ), we observed a tidal constituent (M2) amplitude error of around −0.19 m, which reduced progressively near the bay entrance. These values suggest that when using the peak tidal elevation in the river discharge-dominated zone (RP to NB), we must consider the tidal amplitude error in the final stillwater elevation estimates. In the bay region (SJS to LW), it’s essential to carefully consider peak TWL errors when estimating Floodwater Depth return levels.
-
2.
Our analysis used two classical extreme value analysis methods, BM/GEV and POT/GPD, to estimate the 10, 25, 50, and 100-year event Floodwater Depth and their confidence intervals. When comparing the return level estimates using field and model Floodwater Depth, we found that both statistical methods overpredicted the return level when using the model flood dataset. The overprediction was notably higher for POT/GPD. In this work, we did not delve into the underlying reasons behind the performance of both EVA methods, such as the sensitivity of sample size in BM/GEV or the threshold used in POT/GPD, leaving it as a topic for future study. Additionally, users can use a more refined and robust statistical methods, such as non-stationary extreme value models or Bayesian approaches, to estimate the return levels directly from the provided TWL or Floodwater Depth time series.
-
3.
In our stillwater elevation return level estimates, we merged the peak tidal elevation in 2019 with Floodwater Depth levels. This peak tidal elevation included the purely tidal elevation and the adjusted mean sea level based on the historical sea-level trend until 2019. Many recent studies, based on projected SLR rates for different climate scenarios, provided the exceedance probability of extreme water levels that included future changes to the mean sea level. Including the future increase in the sea level can change the frequency and peak of the return levels, providing a different estimate of the extremes. However, the simplistic assumptions of future sea levels could work well near coastlines without the significant presence of tidal wetlands and floodplains. In converging tidal estuaries, like DBR, the along-channel storm tide (tide+surge) propagation could non-linearly interact with the estuarine morphology, and the Floodwater Depth could increase or decrease at various parts of the estuary depending on the tidal wetting and drying of the low-lying wetlands (further details are given in Deb et al.27). The analysis shows that, near PHL, while the mean sea level is expected to rise due to the increase in sea level, the Floodwater Depth for the same storm event could decrease in the future due to a higher rate of wetland submergence. The results from Deb et al.27 suggest that we should be careful about any linear superposition of future SLR conditions in estimating stillwater elevation return levels for this study area. Future work is needed to assess whether the salt marshes in the region will keep up with the projected increase in the mean sea level and how it changes the storm surge propagation along the tidal channel.
-
4.
We provided the model results using 1681 point locations on the channel (water body) distributed over the bay and river regions. Model nodes or point locations over land go through wetting and drying, making them unsuitable for tidal harmonic analysis. Also, the reduced sample size of Floodwater Depth over land is not suitable for extreme value analysis.
Code availability
The 3D ocean model FVCOM code is available from the MEDM Lab (https://github.com/FVCOM-GitHub). The Distributed Hydrology Soil Vegetation Model (DHSVM) code is available at https://www.pnnl.gov/projects/distributed-hydrology-soil-vegetation-model. We performed tidal harmonic analysis using the T_Tide Harmonic Analysis Toolbox (https://www.eoas.ubc.ca/~rich/. Flood return levels are estimated using the Python-based stationary extreme value analysis tool called PyExtreme (github.com/georgebv/pyextremes). The details about Matlab’s ‘detrend’ function are provided in https://www.mathworks.com/help/ident/ref/iddata.detrend.html. The 2D color maps are produced using cmocean (https://github.com/matplotlib/cmocean).
References
Allen, M. et al. Global warming of 1.5 c. an ipcc special report on the impacts of global warming of 1.5 c above pre-industrial levels and related global greenhouse gas emission pathways, in the context of strengthening the global response to the threat of climate change, sustainable development, and efforts to eradicate poverty. Sustainable Development, and Efforts to Eradicate Poverty (2018).
Buchanan, M. K. et al. Sea level rise and coastal flooding threaten affordable housing. Environmental Research Letters 15, 124020, https://doi.org/10.1088/1748-9326/abb266 (2020).
Lincke, D. & Hinkel, J. Coastal migration due to 21st century sea-level rise. Earth’s Future 9, e2020EF001965, https://doi.org/10.1029/2020EF001965 (2021).
Balaguru, K. et al. Increased U.S. coastal hurricane risk under climate change. Science Advances 9, eadf0259, https://doi.org/10.1126/sciadv.adf0259 (2023).
Human climate horizons. https://horizons.hdr.undp.org/. Accessed: 03-21-2024.
Wuebbles, D. et al. Climate science special report: Fourth national climate assessment (NCA4), Volume I (2017).
Jonkman, S. N. Global perspectives on loss of human life caused by floods. Natural hazards 34, 151–175 (2005).
Handmer, J. et al. Changes in impacts of climate extremes: human systems and ecosystems. Managing the risks of extreme events and disasters to advance climate change adaptation special report of the intergovernmental panel on climate change 231–290 (2012).
Economics and demographics. https://coast.noaa.gov/states/fast-facts/economics-and-demographics.html. Accessed: 03-18-2024.
Smith, A. B. US Billion-dollar weather and climate disasters, 1980-present (2022).
U.s. billion-dollar weather and climate disasters https://doi.org/10.25921/stkw-7w73 Accessed: 06-26-2025 (2025).
Holmes Jr, R. R. & Dinicola, K. 100-year flood–it’s all about chance. Tech. Rep., US Geological Survey (2010).
Eychaner, J. H. Lessons from a 500-year record of flood elevations. Association of State Floodplain Managers, Technical Report7 (2015).
England Jr, J. F. et al. Guidelines for determining flood flow frequency-bulletin 17c. Tech. Rep., US Geological Survey (2019).
Flood maps. https://www.fema.gov/flood-maps. Accessed: 03-21-2024.
Flood risk management. https://www.usace.army.mil/Missions/Civil-Works/Flood-Risk-Management/. Accessed: 03-21-2024.
Arns, A., Wahl, T., Haigh, I., Jensen, J. & Pattiaratchi, C. Estimating extreme water level probabilities: A comparison of the direct methods and recommendations for best practise. Coastal Engineering 81, 51–66, https://doi.org/10.1016/j.coastaleng.2013.07.003 (2013).
Zervas, C. E. Extreme water levels of the united states 1893-2010. Tech. Rep., Center for Operational Oceanographic Products and Services (U.S.) https://repository.library.noaa.gov/view/noaa/14420 (2013).
Callahan, J. A. & Leathers, D. J. Estimation of Return Levels for Extreme Skew Surge Coastal Flooding Events in the Delaware and Chesapeake Bays for 1980–2019. Frontiers in Climate 3, 684834, https://doi.org/10.3389/fclim.2021.684834 (2021).
Nadal-Caraballo, N. C., Melby, J. A. & Gonzalez, V. M. Statistical Analysis of Historical Extreme Water Levels for the U.S. North Atlantic Coast Using Monte Carlo Life-Cycle Simulation. Journal of Coastal Research 32, 35–45, https://doi.org/10.2112/JCOASTRES-D-15-00031.1 (2016).
Sweet, W. V., Genz, A. S., Obeysekera, J. & Marra, J. J. A Regional Frequency Analysis of Tide Gauges to Assess Pacific Coast Flood Risk. Frontiers in Marine Science 7 (2020).
Collings, T. P. et al. Global application of a regional frequency analysis to extreme sea levels. Natural Hazards and Earth System Sciences 24, 2403–2423, https://doi.org/10.5194/nhess-24-2403-2024 (2024).
Calafat, F. M. & Marcos, M. Probabilistic reanalysis of storm surge extremes in europe. Proceedings of the National Academy of Sciences 117, 1877–1883, https://doi.org/10.1073/pnas.1913049117 (2020).
Batstone, C. et al. A uk best-practice approach for extreme sea-level analysis along complex topographic coastlines. Ocean Engineering 71, 28–39, https://doi.org/10.1016/j.oceaneng.2013.02.003 (2013).
Kirezci, E. et al. Projections of global-scale extreme sea levels and resulting episodic coastal flooding over the 21st century. Scientific reports 10, 1–12 (2020).
Deb, M. et al. Estuarine hurricane wind can intensify surge-dominated extreme water level in shallow and converging coastal systems. EGUsphere 2023, 1–28, https://doi.org/10.5194/egusphere-2023-2134 (2023).
Deb, M. et al. Interacting effects of watershed and coastal processes on the evolution of compound flooding during hurricane irene. Earth’s Future 11, e2022EF002947, https://doi.org/10.1029/2022EF002947 (2023).
Wigmosta, M. S., Vail, L. W. & Lettenmaier, D. P. A distributed hydrology-vegetation model for complex terrain. Water resources research 30, 1665–1679 (1994).
Chen, C., Liu, H. & Beardsley, R. C. An unstructured grid, finite-volume, three-dimensional, primitive equations ocean model: Application to coastal ocean and estuaries. Journal of Atmospheric and Oceanic Technology 20, 159–186, https://doi.org/10.1175/1520-0426(2003)020_0159:AUGFVT_2.0.CO;2 (2003).
Jones, A. D. et al. Continental united states climate projections based on thermodynamic modification of historical weather. Scientific Data 10, 664 (2023).
Coles, S., Bawa, J., Trenner, L. & Dorazio, P.An introduction to statistical modeling of extreme values, vol. 208 (Springer, 2001).
Sun, N., Yearsley, J., Voisin, N. & Lettenmaier, D. P. A spatially distributed model for the assessment of land use impacts on stream temperature in small urban watersheds. Hydrological Processes 29, 2331–2345, https://doi.org/10.1002/hyp.10363 (2015).
Perkins, W. A. et al. Parallel distributed hydrology soil vegetation model (dhsvm) using global arrays. Environmental Modelling & Software 122, 104533, https://doi.org/10.1016/j.envsoft.2019.104533 (2019).
Weisberg, R. H. & Zheng, L. Hurricane storm surge simulations for Tampa Bay. Estuaries and Coasts 29, 899–913, https://doi.org/10.1007/BF02798649 (2006).
Rego, J. L. & Li, C. On the importance of the forward speed of hurricanes in storm surge forecasting: A numerical study: FORWARD SPEED OF A HURRICANE. Geophysical Research Letters 36, n/a–n/a, https://doi.org/10.1029/2008GL036953 (2009).
Yang, Z. et al. A modeling study of coastal inundation induced by storm surge, sea-level rise, and subsidence in the gulf of mexico. Natural Hazards 71, 1771–1794 (2014).
Adcirc tidal databases. https://adcirc.org/products/adcirc-tidal-databases/. Accessed: 04-04-2024.
Mukai, A. Y., Westerink, J. J., Luettich Jr, R. A. & Mark, D.Eastcoast 2001, a tidal constituent database for western North Atlantic, Gulf of Mexico, and Caribbean Sea (US Army Corps of Engineers Vicksburg, 2002).
Map of sea level rise from topex and jason-1,-2,-3. https://www.star.nesdis.noaa.gov/socd/lsa/SeaLevelRise/LSA_SLR_maps.php. Accessed: 04-04-2024.
Rashid, M. M., Moftakhari, H. & Moradkhani, H. Stochastic simulation of storm surge extremes along the contiguous united states coastlines using the max-stable process. Communications Earth & Environment 5, 39 (2024).
Callahan, J. A., Leathers, D. J. & Callahan, C. L. Skew Surge and Storm Tides of Tropical Cyclones in the Delaware and Chesapeake Bays for 1980–2019. Frontiers in Climate 3, 610062, https://doi.org/10.3389/fclim.2021.610062 (2021).
Bernier, N. B. & Thompson, K. R. Tide-surge interaction off the east coast of canada and northeastern united states. Journal of Geophysical Research: Oceans 112, https://doi.org/10.1029/2006JC003793 (2007).
Spicer, P., Huguenard, K., Ross, L. & Rickard, L. N. High-frequency tide-surge-river interaction in estuaries: Causes and implications for coastal flooding. Journal of Geophysical Research: Oceans 124, 9517–9530, https://doi.org/10.1029/2019JC015466 (2019).
Coastal flood thresholds. weather.gov/media/erh/erhcoast/CoastalFloodThresholds.pdf. Accessed: 04-09-2025.
Merz, B. et al. Understanding heavy tails of flood peak distributions. Water Resources Research 58, e2021WR030506 (2022).
Tebaldi, C., Strauss, B. H. & Zervas, C. E. Modelling sea level rise impacts on storm surges along us coasts. Environmental Research Letters 7, 014032, https://doi.org/10.1088/1748-9326/7/1/014032 (2012).
Nadal-Caraballo, N. C., Melby, J. A. et al. North atlantic coast comprehensive study phase i: statistical analysis of historical extreme water levels with sea level change. ERDC/CHL TR-147 (2014).
Wahl, T. et al. Understanding extreme sea levels for broad-scale coastal impact and adaptation analysis. Nature communications 8, 16075 (2017).
Kopp, R. E. et al. Usable science for managing the risks of sea-level rise. Earth’s Future 7, 1235–1269, https://doi.org/10.1029/2018EF001145 (2019).
Wong, T. E., Sheets, H., Torline, T. & Zhang, M. Evidence for increasing frequency of extreme coastal sea levels. Frontiers in Climate 4, https://doi.org/10.3389/fclim.2022.796479 (2022).
Madsen, H., Pearson, C. P. & Rosbjerg, D. Comparison of annual maximum series and partial duration series methods for modeling extreme hydrologic events: 2. regional modeling. Water Resources Research 33, 759–769 (1997).
Katz, R. W., Parlange, M. B. & Naveau, P. Statistics of extremes in hydrology. Advances in Water Resources 25, 1287–1304, https://doi.org/10.1016/S0309-1708(02)00056-8 (2002).
Hosking, J. R. M. & Wallis, J. R. Regional Frequency Analysis (Cambridge University Press, New York, 1997).
Yılmaz, A., Kara, M. & Özdemir, O. Comparison of different estimation methods for extreme value distribution. Journal of Applied Statistics 48, 2259–2284 (2021).
Deb, M., Sun, N., Yang, Z. & Judi, D. Extreme floodwater depth and stillwater elevation return levels in the Delaware Bay and River, USA (version 1) [Data set] https://doi.org/10.57931/2350826 (2024).
Sun, N. et al. Amplified extreme floods and shifting flood mechanisms in the delaware river basin in future climates. Earth’s Future 12, e2023EF003868, https://doi.org/10.1029/2023EF003868 (2024).
Cooper, M. G. et al. Enhanced flood synchrony and downstream severity in the delaware river under rising temperatures. Communications Earth & Environment 6, 296 (2025).
Acknowledgements
This work was supported by the MultiSector Dynamics (MSD), Office of Science, Office of Biological and Environmental Research as part of the multi-program, collaborative Integrated Coastal Modeling (ICoM) project. All model simulations were performed using resources available through Research Computing at Pacific Northwest National Laboratory and the National Energy Research Scientific Computing Center (NERSC), a U.S. Department of Energy Office of Science User Facility located at Lawrence Berkeley National Laboratory.
Author information
Authors and Affiliations
Contributions
M.D. and N.S. designed the general approach of developing the datasets. M.D. performed FVCOM model simulations, validation, and extreme value analysis. N.S. performed DHSVM model simulations and validation. M.D. wrote the paper, and N.S., Z.Y., M.G.C., and T.W. revised it. D.J. advised during the work design and managed the fund for this research. All authors participated in discussions during the development of the manuscript.
Corresponding author
Ethics declarations
Competing interests
The authors declare no competing interests.
Additional information
Publisher’s note Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Deb, M., Sun, N., Yang, Z. et al. Extreme flood return levels in a U.S. mid-Atlantic estuary using 40-year fluvial-coastal model simulations. Sci Data 12, 1459 (2025). https://doi.org/10.1038/s41597-025-05566-9
Received:
Accepted:
Published:
Version of record:
DOI: https://doi.org/10.1038/s41597-025-05566-9
