
Abstract
This paper is concerned with the adaptive tracking control problem for nonlinear systems with virtual control coefficients including known and unknown items. The known items are employed for controller design directly, such that more information is utilized to achieve better performance. To deal with the unknown items, a novel real control law is firstly constructed by introducing an auxiliary system. The proposed controller is designed and applied to an uncertain TCP/AQM network system, which guarantees the practical boundedness of all the signals in the closed-loop system. Finally, the effectiveness and practicability of the developed control strategy are validated by simulation results.
Similar content being viewed by others
Introduction
Recent years, the adaptive tracking control for nonlinear systems has been a popular technique in science and engineering. There have been a lot of research results in this area1,2,3,4,5,6, especially since the backstepping method was proposed7. In view of finite-time control and constrained input/output, two adaptive tracking controllers were designed for marine surface vehicles under external disturbances4,6 . An adaptive control strategy was presented by considering three event-triggered control schemes5. Combining state constraints and input deadzone, an adaptive finite-time tracking control approach was proposed1. By introducing an improved performance function, an adaptive tracking control method was studied based on funnel control2. For high-order fully actuated nonlinear systems with unknown parameters, an adaptive controller was introduced using tuning functions to remove overparametrization3. Considering systems with uncertain nonlinear functions, an fuzzy control strategy was given8. The usual control problems, such as external perturbations, uncertain parameters and nonlinear functions are handled in the above papers. It needs to highlight that the virtual control coefficients are assumed to be 15,8, known constants1,4,6 or known nonlinear functions2,3.
However, virtual control coefficients may not be completely known in practical applications. There have been several approaches that can be used to construct controllers for nonlinear systems with uncertain virtual control coefficients. Nussbaum gain, one of the most popular techniques, was firstly proposed9, which employed even Nussbaum functions to design tracking controllers for nonlinear systems with unknown constant virtual control coefficients9,10,11,12,13. Ge et al. addressed the control problem for nonlinear systems with unknown time-varying virtual control coefficients14. Furthermore, the Nussbaum gain technique was generalized to nonlinear systems, whose virtual control coefficients were unknown nonlinear functions of system states15. There also have been many relevant achievements16,17,18,19,20. Moreover, virtual control coefficients could be handled according to the inequality \(\left| x\right| -x/\sqrt{x^{2}+\lambda ^{2}}<\lambda\), where x is any real number and \(\lambda >0\)21,22. In addition, by approximating uncertainties of nonlinear systems via fuzzy logic23,24 or neural network25,26, the control laws \(\alpha _{i}\)s were constructed to ensure \(z_{i}\alpha _{i}\le 0\) such that virtual control coefficients could be replaced by their lower bounds, where \(z_{i}=x_{i}-\alpha _{i-1}\) with \(x_{i}\) being system state, \(i=1\), 2, \(\ldots\), n. Nevertheless, the virtual control coefficients of nonlinear systems studied by above strategies are always assumed to take values in nonzero closed intervals. And the bounds of virtual control coefficients are chosen to small in simulations, which are difficult to implement when the bounds of virtual control coefficients are big.
The research on active queue management (TCP/AQM) systems has been a hot topic27,28,29,30,31,32. Recently, the adaptive control technique was applied to congestion control for TCP/AQM networks. An adaptive congestion controller was developed for a TCP/AQM network based on a new finite-time performance function33. Considering fuzzy logic and funnel control, an adaptive congestion control approach was given for a TCP/AQM network34. In view of barrier Lyapunov and neural network, the adaptive TCP/AQM network congestion control was studied35. Furthermore, aiming at a novel system model with the uncertain link bandwidth, which was supposed to be known33,34,35, two adaptive TCP network congestion controllers were designed36,37. However, it is noted that the link bandwidth C is unknown, but the round-trip time R(t) is taken to be known, which is a function of C in36,37. Obviously, this is contradictory.
Encouraged by the previous results, this paper is devoted to the adaptive control problem for nonlinear systems with unknown virtual control coefficients and its application to TCP/AQM network systems. Firstly, both controller design and stability analysis are achieved for a class of uncertain nonlinear systems. Furthermore, the proposed control method is applied to a TCP/AQM network, which guarantees the practical boundness of all the signals in the closed-loop system. Finally, the effectiveness of the developed controller is validated by two simulation examples.
The main contributions of this paper are stated as
-
(1)
The virtual control coefficients of nonlinear systems are formulated by known and unknown terms so that the bounds of virtual control coefficients are smaller than those expressed as one unknown item in9,10,11,12,13,14,15,16,17,18,19,20,21,22,23,24,25,26. In applications, virtual control coefficients of many real systems are partially known. Therefore, It is feasible to separate virtual control coefficients into known constants and unknown functions by selecting suitable nominal values of system states according to practical requirements. This is demonstrated by the application to a TCP/AQM network.
-
(2)
By defining the variable \({\dot{\Psi }}_{r}\) in (23), a new auxiliary system (21) is designed to compensate the items due to the unknown parts of virtual control coefficients, and a novel control law (17) is developed, which ensures the practical bounded control of nonlinear systems.
-
(3)
Compared to these adaptive TCP/AQM network congestion control schemes33,34,35,36,37, not only the link bandwidth C but also the round-trip time R(t) are considered to be unknown. This is an improvement on the methods in33,34,35. Simultaneously, the contradiction existing in36,37 is excluded.
The outline of the paper is organized as: second section presents the problem formulation and preliminaries. The control design and stability analysis is given in next section, and its application to a TCP/AQM network follows in next section. Finally, the simulation results and conclusion are shown in section V and VI, respectively.
Problem formulation and preliminaries
The following dynamics of an uncertain TCP/AQM network is considered33,34,35,36,37.
where \(x_{1}\) and \(x_{2}\) are the queue length of router and TCP window size, respectively, \(T_{p}\) is the propagation delay, N is the TCP network load, both known, C is the link bandwidth, which is an unknown constant, \(u_{r}\) is the packet drop probability.
Remark 1
From the actual physical connotations, it is reasonable to assume that \(T_{p}>0\), \(N>0\), \(x_{1}\in \left[ x_{1m},x_{1M}\right]\), \(x_{2}\in \left[ 1,x_{2M}\right]\),\(\ {C\in }\left[ C_{m},C_{M}\right]\) and \(u_{r}\in \left[ 0,1\right]\) with \(x_{1m}\), \(x_{1M}\), \(x_{2M}\), \(C_{m}\) and \(C_{M}\) being positive constants. Thus, it is known that there is no singularity in the virtual control coefficients.
Firstly, \(\frac{C}{x_{1}+CT_{p}}\) is transformed into the following form by introducing \(x_{10}\), \(C_{0}\), which are the nominal values of \(x_{1}\) and C.
where
and
Assumption 1
Suppose that the queue length of router \(x_{1}\) and link bandwidth C are bounded.
According to Assumption 1, it is shown that \(\Delta\) is bounded, which is expressed as
with
and
Then, the system (1) is changed to be
Remark 2
It is easy to check that the range of \(\Delta\) is much smaller than the bound of \(\frac{C}{x_{1}+CT_{p}}\). Besides, all the link bandwidth C are unknown, such that the contradiction in36,37 does not exist in this paper.
Assumption 2
Suppose that the continuity and boundedness of ideal trajectory vector \({\bar{y}}_{d}(t)=[y_{d}(t)\), \({\dot{y}}_{d}(t)\), \(\ldots\), \(y_{d}^{(n)}(t)]^{T}\) are guaranteed.
Different from the existing dynamics of uncertain TCP/AQM networks, the virtual control coefficients in this paper are divided into the known item \(p_{0}\) and unknown bounded item \(\Delta\). There exist \({\varepsilon } _{r1}N\Delta x_{2}\), \({\varepsilon }_{r2}\frac{\partial {\rho }_{r1}}{x_{1}} N\Delta x_{2}\), \({\varepsilon }_{r2}\Delta v_{r}\) and \({\varepsilon } _{r2}\Delta\) inevitably in the following controller design, which will be explained later. It is a severe challenge to deal with the above items.
Controller design and main results
The following coordinate transformation is employed to design a controller via backstepping.
Step 1: Select the Lyapunov function candidate as
where \(q_{r}>0\) is a constant and \({\tilde{C}}=C-C^{*}\) with \(C^{*}\) being the approximation of C.
\({\dot{V}}_{r1}\) is deduced as
Design the first virtual control signal as
where \(k_{r1}\) is a positive constant.
Invoking (12) leads to
where
Step 2: The 2th Lyapunov function candidate is given as
By some direct calculations, \({\dot{V}}_{r2}\) is written as
Constructing
and substituting it in (16) yield
In view of the definition of \(\rho _{r1}\) in (12), we have
with
Replacing \({{\dot{\rho }}}_{r1}\) in (18) by (19) produces
Design the following function
where \(v_{r\max }\) is the practical maximum of \(v_{r}\), and \(Z=\left[ x_{1},x_{2},y_{d}^{*},{\dot{y}}_{d}^{*},C^{*}\right] ^{T}\).
Then, choose the control law as
and
where \(k_{rf}\), \(c_{r1}\) and \(c_{r2}\) are positive constants and \(c_{r1}<c_{r2}/k_{rf}\), \(\Psi _{r}\left( 0\right)\) is the initial value of \(\Psi _{r}\), which is chosen in the interval of \(\left[ c_{r1},c_{r2}/k_{rf} \right]\), \(i=1,2\), and
Remark 3
Although there is \({{\dot{\rho }}}_{r1}\) in the controller (22), the repeated differentiation will not occur due to the system order only being 2. Besides, the proposed control scheme does not utilize approximators based on fuzzy logics or neural networks, which means that the computational complexity does not increase exponentially as the number of the rules increases. Therefore, the explosion of computation does nor exist. At worst, there have been many methods to deal with the problem38.
Substituting (22) in (20) results in
Construct the adaptive law as
By invoking (26) and considering (5), \({\dot{V}}_{r2}\) is rewritten as
The main results of the paper are stated below.
Theorem 1
Considering the nonlinear system (1) with Assumption 1, the developed control strategy, including the control law (17) and adaptive law (26), guarantees the practical boundedness of all the signals in the resulting closed-loop systems.
Proof
Design the 3th Lyapunov synthesis candidate as
Case 1: \(\left| \varepsilon _{ri}\right| \ge \sigma _{ri}\) or \(C^{*}\ge {\hat{C}}\), \(i=1\), 2
Then, \({\dot{V}}_{r3}\) is computed as
It is known from (29) that \(V_{r3}\) is bounded, which means that \(\varepsilon _{r1}\), \(\varepsilon _{r2}\), \(C^{*}\), and \(\Psi _{r}\) are all bounded. From \(\varepsilon _{r1}=x_{1}-y_{d}^{*}\) and the boundedness of \(y_{d}^{*}\), it is obtained that \(x_{1}\) is bounded. According to (12), the boundedness of \(\rho _{r1}\) is verified, which implies that \(x_{2}\) is bounded by considering \(\varepsilon _{r2}=x_{2}-\rho _{r1}\). It follows that \(u_{r}\) is bounded. Therefore, the conclusion as Theorem 1 is obtained.
Case 2: \(\left| \varepsilon _{ri}\right| <\sigma _{ri}\) and \(C^{*}<{\hat{C}}\)
It can not be obtained that \({\dot{V}}_{r3}\le -\kappa V_{r3}+\gamma\), which means \(\varepsilon _{i}\) and \(C^{*}\) may not be convergent. However, Case 2 will be switched to Case 1 when \(\left| \varepsilon _{ri}\right| \ge \sigma _{ri}\) or \(C^{*}\ge {\hat{C}}\), such that the practical boundedness of all the signals is obtained. \(\square\)
Remark 4
(1) The range of \(k_{ri}\) is wide. The bigger the parameter \(k_{ri}\), the faster the response and smaller the steady state error. However, it cannot be too big. (2) \(k_{rf}\) should be small enough and chosen according to the value of \(c_{r2}\), such that \(c_{r2}/k_{rf}\) is not too big. (3) \({q}_{r}\) should be big enough, which can guarantee that the steady state error is small enough. (4) \(c_{r1}\) and \(c_{r2}\) should satisfy \(c_{r1}<c_{r2}/k_{rf}\), and \(c_{r2}\) can not be selected too big, which may cause a bigger steady state error.
Simulation results
In this section, the proposed control scheme is simulated for an uncertain TCP/AQM network and compared with the controller in37, which are abbreviated to be C2 and C1, respectively.
The uncertain TCP/AQM network is described as (1), whose parameters are chosen as \(N=100\), \(T_{p}=0.1\) s, \(x_{1m}=100\) packets, \(x_{10}=100\) packets, \(x_{1M}=102\) packets, \(x_{2M}=6\) byte, \(C_{m}=1950\) packets/s, \(C_{0}=2000\) packets/s, \(C_{M}=2050\) packets/s. The saturation of \(u_{r}\) is selected to be 1.
The initial states are given as \([x_{1}\), \(x_{2}\), \(\Psi _{r}\), \(C^{*}]^{T}=[100\), 5.2, 3, \(2000]^{T}\). In order to further show the superiority of C2, the following dynamic desired trajectory is chosen
which is always selected to be constant in33,34,35,36,37.
The virtual control signal \(\rho _{r1}\), real control law \(u_{r}\) and \({\dot{\Psi }}_{r}\) are constructed as (12), (17) and (23), with \(k_{r1}=500\), \(k_{r2}=500\), \(k_{rf}=10\), \(c_{r1}=1\), \(c_{r2}=100\). The adaptive law \({\dot{C}}^{*}\) is designed as (26) with \(q_{r}=5\).

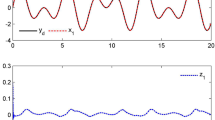
The tracking errors of the queue length.

The actual and desired queue lengths.

The packet drop probability.

The TCP window size.

The adaptive link bandwidth.

The auxiliary variable.
Figures 1, 2, 3, 4, 5 and reff6 show the simulation results. In Fig. 1, the tracking errors under C2 and C1 of the queue length are shown. It is easy to see that the error under C2 is smaller than the error under C1, whose absolute mean values are 0.0824, 1.0564 and root mean square values are 0.5063, 2.5891, respectively. The actual queue lengths \(y^{*}\) are displayed in Fig. 2, which can track desired queue length \(y_{d}^{*}\), after transient oscillation. However, the tracking performance under C2 is much better than C1 during the transient state. Figure 3 gives the packet drop probability \(u_{r}\), which varies between 0 and 1 in the transient state and varies around 0.1 in the steady state. The TCP window size \(x_{2}\) is drawn in Fig. 4, which oscillates before 0.2s and varies according to \(y_{d}^{*}\). Figure 5 presents the adaptive link bandwidth \(C^{*}\), it can be known that it tends to its real value 2000b/s. The auxiliary variable \(\Psi _{r}\) is presented in Fig. 6, which is bounded and converges to 10.
Conclusion
This paper has been devoted to the study of adaptive tracking control for nonlinear systems in a new form, whose virtual control coefficients consist of known and unknown items. The proposed controller not only utilized known information fully to pursue better control performance, but also handled unknown items by defining a novel auxiliary system. To demonstrate the feasibility of the developed control scheme, it was further applied to the congestion control of an uncertain TCP/AQM network system. In future, we plan to combine the proposed control scheme with fixed-time control39,40 and apply it to some other real systems, such as robots, quadrotors, and so on.
Data availibility
All data generated or analysed during this study are included in this published article.
References
Li, H. Y., Zhao, S. Y., He, W. & Lu, R. Q. Adaptive finite-time tracking control of full state constrained nonlinear systems with dead-zone. Automatica 100, 99–107 (2019).
Liu, C. G. et al. Event-triggered adaptive tracking control for uncertain nonlinear systems based on a new funnel function. ISA Trans. 99, 130–138 (2020).
Liu, C. G., Liu, X. P., Wang, H. Q., Zhou, Y. C. & Gao, C. Adaptive control for unknown hofa nonlinear systems without overparametrization. Int. J. Robust Nonlinear Control 33, 3640–3660 (2023).
Wang, N., Qian, C. J., Sun, J. C. & Liu, Y. C. Adaptive robust finite-time trajectory tracking control of fully actuated marine surface vehicles. IEEE Trans. Control Syst. Technol. 24, 1454–1462 (2016).
Xing, L. T., Wen, C. Y., Liu, Z. T., Su, H. Y. & Cai, J. P. Event-triggered adaptive control for a class of uncertain nonlinear systems. IEEE Trans. Autom. Control 62, 2071–2076 (2017).
Zheng, Z. W., Huang, Y. T., Xie, L. H. & Zhu, B. Adaptive trajectory tracking control of a fully actuated surface vessel with asymmetrically constrained input and output. IEEE Trans. Control Syst. Technol. 26, 1851–1859 (2018).
Kanellakopoulos, I., Kokotovic, P. & Morse, A. Systematic design of adaptive controllers for feedback linearizable systems. IEEE Trans. Autom. Control 20, 649–654 (1991).
Liu, Y., Yao, D. Y., Li, H. Y. & Lu, R. Q. Distributed cooperative compound tracking control for a platoon of vehicles with adaptive NN. IEEE Trans. Cybern. 11, 7039–7048 (2021).
Tong, S. C. & Li, Y. M. Fuzzy adaptive robust backstepping stabilization for siso nonlinear systems with unknown virtual control direction. Inf. Sci. 180, 4619–4640 (2010).
Li, Y. X. & Yang, G. H. Observer-based adaptive fuzzy quantized control of uncertain nonlinear systems with unknown control directions. Fuzzy Sets Syst. 371, 61–77 (2019).
Ma, H., Liang, H. J., Ma, H. J. & Zhou, Q. Nussbaum gain adaptive backstepping control of nonlinear strict-feedback systems with unmodeled dynamics and unknown dead zone. Int. J. Robust Nonlinear Control 28, 5326–5343 (2018).
Wang, J. Z., Yu, J. B., Zhou, Q. & Wu, Y. Q. Global robust output tracking control for a class of cascade nonlinear systems with unknown control directions. Int. J. Comput. Math. 92, 939–953 (2015).
Yu, J. B., Lv, H. L. & Wu, Y. Q. Global adaptive regulation control for a class of nonlinear systems with unknown control coefficients. Int. J. Adapt. Control Signal Process. 30, 843–863 (2016).
Ge, S. S. & Wang, J. Robust adaptive tracking for time-varying uncertain nonlinear systems with unknown control coefficients. IEEE Trans. Autom. Control 48, 1463–1469 (2003).
Ge, S. S., Hong, F. & Lee, T. H. Adaptive neural control of nonlinear time-delay systems with unknown virtual control coefficients. IEEE Trans. Syst. Man Cybern. 34, 499–516 (2004).
Bechlioulis, C. P. & Rovithakis, G. A. Adaptive control with guaranteed transient and steady state tracking error bounds for strict feedback systems. Automatica 45, 532–538 (2009).
Li, D. J. & Li, D. P. Adaptive tracking control for nonlinear time-varying delay systems with full state constraints and unknown control coefficients. Automatica 93, 444–453 (2018).
Ma, J. J., Zheng, Z. Q. & Li, P. Adaptive dynamic surface control of a class of nonlinear systems with unknown direction control gains and input saturation. IEEE Trans. Cybern. 45, 728–741 (2015).
Wang, L. J. & Philip Chen, C. L. Adaptive fuzzy dynamic surface control of nonlinear constrained systems with unknown virtual control coefficients. IEEE Trans. Fuzzy Syst. 28, 1737–1747 (2019).
Yang, Z. Y., Yang, Q. M. & Sun, Y. X. Adaptive neural control of nonaffine systems with unknown control coefficient and nonsmooth actuator nonlinearities. IEEE Trans. Neural Netw. Learn. Syst. 26, 1822–1827 (2015).
Li, Y. X. & Yang, G. H. Adaptive asymptotic tracking control of uncertain nonlinear systems with input quantization and actuator faults. Automatica 72, 177–185 (2016).
Wang, C. L. & Lin, Y. Decentralized adaptive tracking control for a class of interconnected nonlinear time-varying systems. Automatica 54, 16–24 (2015).
Liu, C. G., Wang, H. Q., Liu, X. P. & Zhou, Y. C. Adaptive finite-time fuzzy funnel control for nonaffine nonlinear systems. IEEE Trans. Syst. Man Cybern. Syst. 51, 2894–2903 (2019).
Yang, H. J., Shi, P., Zhao, X. D. & Shi, Y. Adaptive output-feedback neural tracking control for a class of nonstrict-feedback nonlinear systems. lnf. Sci. 334335, 205–218 (2016).
Chen, B., Liu, X. P., Liu, K. F. & Lin, C. Novel adaptive neural control design for nonlinear mimo time-delay systems. Automatica 45, 1554–1560 (2016).
Wang, M., Chen, B., Liu, K. F., Liu, X. P. & Zhang, S. Y. Adaptive fuzzy tracking control of nonlinear time-delay systems with unknown virtual control coefficients. Inf. Sci. 178, 4326–4340 (2008).
Adams, R. Active queue management: A survey. IEEE Commun. Surv. Tutor. 15, 1425–1476 (2013).
Cui, Y. L., Fei, M. R. & Du, D. J. Design of a robust observer-based memoryless \(h_{\infty }\) control for internet congestion. Int. J. Robust Nonlinear Control 26, 1732–1747 (2016).
Han, C. W. et al. Nonlinear model predictive congestion control for networks. Automatica 50, 552–557 (2017).
Sadek, B. A., Houssaine, T. E. & Noreddine, C. Small-gain theorem and finite-frequency analysis of TCP/AQM system with time varying delay. IET Control Theory Appl. 13, 1971–1982 (2019).
Xu, Q. & Sun, J. S. A simple active queue management based on the prediction of the packet arrival rate. J. Netw. Comput. Appl. 42, 12–20 (2014).
Xu, Q., Li, F., Sun, J. S. & Zukerman, M. A new TCP/AQM system analysis. J. Netw. Comput. Appl. 57, 43–60 (2015).
Liu, Y., Jing, Y. W. & Chen, X. Y. Adaptive neural practically finite-time congestion control for TCP/AQM network. Neurocomputing 351, 26–32 (2019).
Wang, K., Liu, Y., Liu, X. P., Jing, Y. W. & Zhang, S. Y. Adaptive fuzzy funnel congestion control for TCP/AQM network. ISA Trans. 95, 11–17 (2019).
Wang, K., Liu, Y., Liu, X. P., Jing, Y. W. & Dimirovski, G. M. Study on TCP/AQM network congestion with adaptive neural network and barrier lyapunov function. Neurocomputing 363, 27–34 (2019).
Li, Z. H., Liu, Y. & Jing, Y. W. Design of adaptive backstepping congestion controller for TCP networks with UDP flows based on minimax. ISA Trans. 95, 27–34 (2019).
Liu, Y., Liu, X. P., Jing, Y. W. & Zhou, S. W. Adaptive backstepping \(h_{\infty }\) tracking control with prescribed performance for internet congestion. ISA Trans. 72, 92–99 (2018).
Liu, K. & Wang, R. J. Antisaturation command filtered backstepping control-based disturbance rejection for a quadarotor UAV. IEEE Trans. Circ. Syst. II(68), 3577–3581 (2021).
Liu, K., Wang, Y., Ji, H. B. & Wang, S. H. Adaptive saturated tracking control for spacecraft proximity operations via integral terminal sliding mode technique. Int. J. Robust Nonlinear Control 31, 9372–9396 (2021).
Liu, K. & Wang, Y. Antisaturation adaptive fixed-time sliding mode controller design to achieve faster convergence rate and its application. IEEE Trans. Circ. Syst. II(69), 3555–3559 (2022).
Acknowledgements
This work is financially sponsored by Shandong Key Laboratory of Intelligent Buildings Technology.
Author information
Authors and Affiliations
Contributions
Z.Z. and Z.L. designed the study, analyzed data and wrote manuscript. All authors contributed to the development and revision of the manuscript, provided relevant intellectual contributions. The data used in this article have been approved by the author.
Corresponding author
Ethics declarations
Competing interests
The authors declare no competing interests.
Additional information
Publisher's note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Zhang, Z., Liu, Z., Liu, N. et al. Adaptive tracking control for nonlinear systems with uncertain control gains and its application to a TCP/AQM network. Sci Rep 13, 14625 (2023). https://doi.org/10.1038/s41598-023-41799-7
Received:
Accepted:
Published:
Version of record:
DOI: https://doi.org/10.1038/s41598-023-41799-7
