
Abstract
The (3 + 1)-dimensional Painlevé integrable equation are a class of nonlinear differential equations with special properties, which play an important role in nonlinear science and are of great significance in solving various practical problems, such as many important models in fields such as quantum mechanics, statistical physics, nonlinear optics, and celestial mechanics. In this work, we utilize the Hirota bilinear form and Mathematica software to formally obtain the interaction solution among lump wave, solitary wave and periodic wave, which has not yet appeared in other literature. Additionally, using the \((G'/G)\)-expansion method, we provide a rich set of exact solutions for the (3 + 1)-dimensional Painlevé integrable equation, which includes two functions with arbitrary values. This method is the first to be applied to the (3 + 1)-dimensional Painlevé integrable equation. By giving some 3D graphics and density maps, the dynamic properties are analyzed and demonstrated, which is beneficial for promoting understanding and application of the (3 + 1)-dimensional Painlevé integrable equation.
Similar content being viewed by others

Introduction
In recent years, nonlinear science has developed rapidly. Many phenomena in nature can be described by nonlinear evolution equations (NLEEs). People often solve NLEEs to understand the phenomena behind the equations. For this reason, many methods for solving the exact solutions of NLEEs have been proposed, such as similarity reduction method1, Riemann–Hilbert approach2, homogeneous balance method3, \((G'/G)\)–expansion method4, Riccati equation expansion method5, variable separation approach6, tanh method7, bilinear neural network method8, darboux transformation method9, Jacobi elliptic function method10, positive quadratic function method11 and so on. With the continuous development of these methods, researchers have obtained many exact solutions to important nonlinear evolution equations12,13,14,15, greatly promoting the development of nonlinear science16,17,18,19,20.
Rogue waves are an extreme or rare event that typically occurs in fields such as oceans, optics, plasma, and finance. The characteristics of rogue waves mainly include their unusually high wave heights, and their appearance is sudden and almost irregular. Due to its extremely high wave height, it poses a serious threat to the safety of offshore buildings, ships, and personnel during navigation. For the study of rogue waves, the current focus is mainly on solving the exact solutions of rogue waves under different models21,22,23,24,25,26, which further reveals the essence and characteristics of rogue waves. This not only theoretically confirms the existence of rogue waves, but also lays a theoretical foundation for the generation of rogue waves in experiments. Overall, rogue waves are an extreme wave phenomenon with unique spatiotemporal distribution and statistical rules, and their research is of great significance for understanding extreme events in fields such as oceans and optics27,28,29,30,31,31,32,33,34.
The Painlevé integrable equation also holds an important position in mathematical theory. They are closely related to mathematical fields such as special functions, elliptic functions, and orthogonal polynomials, providing new perspectives and methods for research in these fields. This paper investigates the following (3 + 1)-dimensional Painlevé integrable equation in fluid mediums35
where \(u=u(x,y,z,t)\), \(\delta _i(i=1,2,\ldots ,7,8)\) is arbitrary constant. Eq. (1) was first proposed by Prof. Abdul-Majid Wazwaz35 and played an important role in nonlinear science, such as many important models in fields such as quantum mechanics, statistical physics, nonlinear optics, and celestial mechanics. Prof. Abdul-Majid Wazwaz examined the integrability of Eq. (1) using the Painlevé analysis method and obtained the multiple soliton and lump solutions. However, the interaction solution among lump wave, solitary wave and periodic wave has not been investigated, there is no literature on the \((G'/G)\)-expansion method for solving non-traveling wave exact solutions of this equation, which will be our main work.
Substituting the logarithmic transformation \(u=\frac{6 \delta _4}{\delta _6} (\ln \xi )_{xx}\) into Eq. (1), we have
where \(\xi =\xi (x,y,z,t)\).
The paper is designed as follows: “Lump-soliton solution” Section obtains the interaction solution between lump wave and solitary waves based on the Hirota bilinear form, which have not been seen in other literature; “Lump-periodic solution” Section derives the interaction solution between lump wave and periodic wave via the Hirota bilinear form; The \((G'/G)\)-expansion method Section investigates some other types of exact solutions by utilizing the \((G'/G)\)-expansion method. The obtained exact solution contains two arbitrary functions. When these two arbitrary functions take different values, we can obtain infinite exact solutions to equation (1). Compared to the previous \((G'/G)\)-expansion method, we employ a unique nonlinear transformation to obtain more types of exact solutions to Eq. (1). “Conclusion” Section gives a summary.
Lump-soliton solution
Prof. Abdul-Majid Wazwaz discussed the lump wave solution of Eq. (1) using positive quadratic functions, but he did not discuss the interaction between lump wave and other solitons. By studying the interaction solutions between lump wave and soliton, new wave phenomena and patterns may be discovered, which may help promote scientific research and technological applications in related fields, making it very meaningful. To this end, we make a supplement on the basis of Ref.35, assuming that Eq. (2) has the following interaction solutions
where \(\mathcal {G}_i\), \(\tau _i\), \(\eta _i(i=1,2,3,4,5)\) and \(k_j(j=1,2)\) are unknown constants. By substituting Eq. (3) into Eq. (2), we get the following algebraic solution

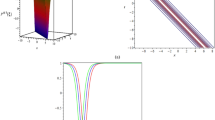
Solution (5) with \(\mathcal {G}_1=\tau _1=\tau _5=\eta _2=k_1=\delta _1=\delta _2 =\delta _3=\delta _4=\delta _6=1\), \(\mathcal {G}_5=2\), \(\eta _1=3\), \(\delta _5=-1\), \(k_2=z=0\), (a) \(t=-0.3\), (b) \(t=0\), (c) \(t=0.3\).

Solution (5) with \(\mathcal {G}_1=\tau _1=\tau _5=\eta _2=k_1=\delta _1=\delta _2 =\delta _3=\delta _4=\delta _6=1\), \(\mathcal {G}_5=2\), \(\eta _1=3\), \(\delta _5=-1\), \(k_2=t=0\), (a) \(z=-8\), (b) \(z=0\), (c) \(z=8\).
Substituting Eqs. (3) and (4) into the logarithmic transformation \(u=\frac{6 \delta _4}{\delta _6} (\ln \xi )_{xx}\), the interaction solution between lump wave and solitons is presented as follows
When \(k_1=k_2=0\), Eq. (5) represents the lump wave, which has been discussed in detail in Ref.5. When \(k_2=0\) and \(k_1\ne 0\), Eq. (5) depicts the interaction between lump wave and one solitary wave. As can be seen from Fig. 1, the solitary wave propagates in the front and the lump wave propagates in the back along the \(x-axis\) in the same direction in the forward direction, and the speed and amplitude of the lump wave are both greater than that of the solitary wave. After a period of time, the lump wave catches up with the solitary wave and spreads forward after joining together. The amplitude of the lump wave decreases obviously, which belongs to inelastic collision. However, when z is taken to different values, we can observe that the solitary wave and the lump wave begin to propagate towards each other, and then join together and continue to propagate forward, and the amplitude of the lump wave also decreases significantly. When \(k_2\) and \(k_1\) are not equal to zero at the same time, Eq. (5) describes the interaction between lump wave and two solitary waves (see Figs. 3 and 4). As can be seen from Figs. 3 and 4, the lump wave suddenly appears on one of the solitons, and then slowly moves to the other soliton. During the moving process, the amplitude gradually increases until it reaches the maximum value at some point, and then transfers to the other soliton and propagates forward together, and the amplitude becomes smaller.

Solution (5) with \(\mathcal {G}_1=\tau _1=\tau _5=\eta _2=k_1=\delta _1=\delta _2 =\delta _3=\delta _4=\delta _6=1\), \(\mathcal {G}_5=k_2=2\), \(\eta _1=3\), \(\delta _5=-1\), \(z=0\), (a) \(t=-0.7\), (b) \(t=0\), (c) \(t=0.7\).

Figure 3 corresponding density map.
Ethical standard
The authors state that this research complies with ethical standards. This research does not involve either human participants or animals.
Lump-periodic solution
The interaction solution between lump wave and periodic wave is of great significance in multiple fields, especially in oceanography, water wave dynamics, and physics. To study the interaction solution of the Painlevé integrable equation, we assume that Eq. (2) has the following interaction solution between lump wave and periodic wave
where \(\eta _i(i=1,2,\ldots ,8,9)\) is unknown constant. By substituting Eq. (6) into Eq. (2), we have

Solution (8) with \(\mathcal {G}_1=\tau _1=\tau _5=k_1=\delta _1=\delta _2 =\delta _3=\delta _4=\delta _5=1\), \(\mathcal {G}_5=2\), \(\eta _1=3\), \(\eta _6=\delta _6=1\), \(k_2=z=0\), (a) \(t=-0.4\), (b) \(t=0\), (c) \(t=0.4\).

Solution (8) with \(\mathcal {G}_1=\tau _1=\tau _5=k_1=\delta _1=\delta _2 =\delta _3=\delta _4=\delta _5=1\), \(\mathcal {G}_5=2\), \(\eta _1=3\), \(\eta _6=\delta _6=1\), \(k_2=4\), \(z=0\), (a) \(t=-0.4\), (b) \(t=0\), (c) \(t=0.4\).
Substituting Eqs. (6) and (7) into the logarithmic transformation \(u=\frac{6 \delta _4}{\delta _6} (\ln \xi )_{xx}\), the interaction solution between lump wave and periodic wave is given as follows
As can be seen from Figs. 5 and 6, the lump and periodic waves are always entangled and propagate forward. Fig. 5 illustrates the interaction between a lump wave and a cosine periodic wave in the \(x-y\) plane. During propagation, the amplitude of the lump wave continuously changes, indicating that it is an inelastic collision and energy is transferred. Figure 6 shows the interaction among lump wave, sine and cosine periodic wave. The amplitudes of the two different periodic waves have changed, indicating an inelastic collision.
The \((G'/G)\)-expansion method
Based on the \((G'/G)\)-expansion method, we directly assume that Eq. (1) has the exact solution of the following form
where \(G = G(\xi )\), \(\phi\) and c are unknown constants, \(a_i(i=0,1,2)=a_i(x,y,z,t)\), \(f(c z+y)\) and h(t) are functions to be determined later. The G satisfies
where \(\lambda\) and \(\mu\) are arbitrary constants. Eq. (10) has the following solutions
Case 1: When \(\lambda ^2-4 \mu >0\), \(\frac{G'}{G}\) satisfies
where \(\tau _1=\frac{\sqrt{\lambda ^2-4 \mu } }{2}\) and \(C_1\), and \(C_2\) are arbitrary constants.
Case 2: When \(\lambda ^2-4 \mu <0\), we have
where \(\tau _2=\frac{\sqrt{-\lambda ^2+4 \mu } }{2}\).
Case 3: When \(\lambda ^2-4 \mu =0\), we get
Compared to the linear transformation commonly used in the \((G'/G)\)-expansion method, we have added two nonlinear functions \(f(c z+y)\) and h(t) to form a nonlinear transformation, which can better handle the coefficients in Eq. (1) and obtain more exact solutions for different types of traveling and non-traveling waves. This is something that the original \((G'/G)\)-expansion method cannot achieve. There is no unified form for new nonlinear transformations, and different nonlinear evolution equations require the construction of different nonlinear transformations, which is quite inconvenient. Substituting Eqs. (9) and (10) into Eq. (1), we derive Case 1:
Substituting Eqs. (13) and (14) into Eq. (9), the rational solution of Eq. (1) is obtained as follows
Substituting Eqs. (11) and (14) into Eq. (9), the hyperbolic function solution of Eq. (1) is given as follows

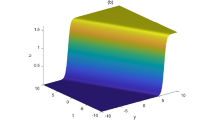
Solution (17) with \(\delta _1=\delta _2 =\delta _3=\delta _4=\delta _5=1\), \(C_2=-1\), \(\delta _8=2\), \(C_1=\delta _6=\delta _7=\lambda =\mu =1\), \(\phi =1/4\), \(z=x=0\), (a) three-dimensional plot, (b) density plot.

Solution (17) with \(\delta _1=\delta _2 =\delta _3=\delta _4=\delta _5=1\), \(C_2=-1\), \(\delta _8=2\), \(C_1=\delta _6=\delta _7=\lambda =\mu =1\), \(\phi =1/4\), \(z=x=0\), (a) three-dimensional plot, (b) density.
Substituting Eqs. (12) and (14) into Eq. (9), the periodic solution of Eq. (1) is presented as follows
In solution (15)-(17), \(f(y+c z)\) and h(t) are not restricted in any way and can be arbitrarily evaluated, which leads to an infinite number of exact solutions to Eq. (1), both linear and nonlinear, which is very interesting. To understand the physical structure of these solutions, let’s take solution (17) as an example. When \(f(y+c z)=y+\frac{\left( \sqrt{\delta _8^2-4 \delta _5 \delta _7}-\delta _8\right) z}{2 \delta _7}+1\) and \(h(t)=3 t+2\), a periodic wave structure can be seen in Fig. 7. It’s a traveling wave solution. When \(f(y+c z)=\left( y+\frac{\left( \sqrt{\delta _8^2-4 \delta _5 \delta _7}-\delta _8\right) z}{2 \delta _7}\right) ^2+1\) and \(h(t)=t^2+2\), solution (17) presents a very interesting structure (see Fig. 8). When \(f(y+c z)=\cosh \left( y+\frac{\left( \sqrt{\delta _8^2-4 \delta _5 \delta _7}-\delta _8\right) z}{2 \delta _7}\right) +1\) and \(h(t)=\sinh (t)+2\), a new physical structure can be seen in Fig. 9.
Case 2:
where \(\chi _1\) and \(\chi _2\) are integral constants. Substituting Eqs. (11)-(13) and Eq. (18) into Eq. (9), respectively, gives Eq. (1) another set of rational solution, hyperbolic function solution and periodic solutions. We won’t go into details here.

Solution (17) with \(\delta _1=\delta _2 =\delta _3=\delta _4=\delta _5=1\), \(C_2=-1\), \(\delta _8=2\), \(C_1=\delta _6=\delta _7=\lambda =\mu =1\), \(\phi =1/4\), \(z=x=0\), (a) three-dimensional plot, (b) density.
Due to the arbitrariness of the f and h functions in solutions (15)-(17), we can obtain an infinite number of exact solutions for traveling and non-traveling waves in Eq. (1), which was not possible with previous traveling wave transformations in the \((G'/G)\)-expansion method, greatly promoting the development and application of this method.
Conclusion
In this work, a (3 + 1)-dimensional Painlevé integrable equation is investigated in fluid mediums, which was first proposed by Prof. Abdul-Majid Wazwaz. The Painlevé integrable equation has a profound background in physics. These equations have wide applications in many scientific fields, especially in physics. For example, in fields such as quantum mechanics, statistical physics, nonlinear optics, and celestial mechanics, many important models can be reduced to differential equations that satisfy the Painlevé property. The interaction solution between lump wave and solitary wave are obtained by utilizing the Hirota bilinear form and Mathematica software36,37,38,39,40,41,42,43, which has not been studied in other literature yet. Figures 1 and 2 show the interaction between lump wave and single soliton. From the beginning of their respective propagation to mutual fusion, the amplitude of lump wave decreases continuously, which is an inelastic collision. Figures 3 and 4 depict the interaction between a lump wave and two solitary waves, propagating from one soliton to the other with amplitudes from small to large and then from large to small. Meanwhile, the interaction solution between lump wave and periodic wave are also presented, which is shown in Figs. 5 and 6. This type of interaction solution is also being discussed for the first time. Finally, a rich set of exact solutions for the (3 + 1)-dimensional Painlevé integrable equation are derived by using the \((G'/G)\)-expansion method, which includes rational, hyperbolic function and trigonometric function solutions. Because of the arbitrariness of \(f(y+c z)\) and h(t), we can get infinitely many exact solutions to Eq. (1). Some new physical structures are found in Figs. 7, 8 and 9. The \((G'/G)\)-expansion method has the characteristics of simple calculation and accurate solution. By constructing specific expansions, complex nonlinear equations can be transformed into simple algebraic systems, thereby reducing the difficulty of solving. In addition, this method can also obtain multiple solutions to nonlinear equations, including soliton solutions, periodic solutions, etc., providing rich mathematical tools for the study of nonlinear phenomena. We will replace the linear transformation in the \((G'/G)\)-expansion method with a nonlinear transformation, which can obtain more exact solutions of different types but also increase the difficulty of solving. Moreover, the nonlinear transformation used is not universal, and different equations require different types of nonlinear transformations. In the future, we hope to find a unified nonlinear transformation to solve most nonlinear problems. All the results of the paper have been validated for accuracy through Mathematica software.
Data availability
Data sharing not applicable to this article as no datasets were generated or analysed during the current study.
References
Lou, S. Y., Tang, X. Y. & Lin, J. Similarity and conditional similarity reductions of a (2+1)-dimensional KdV equation via a direct method. J. Math. Phys. 41, 8286–8303 (2000).
Ma, W. X. Riemann–Hilbert problems and soliton solutions of nonlocal reverse-time NLS hierarchies. Acta. Math. Sci. 42, 127–140 (2022).
Fan, E. G. Two new applications of the homogeneous balance method. Phys. Lett. A 265, 353–357 (2000).
Gu, Y. Y., Aminakbari, N. Bernoulli \((G^{\prime }/G)\)-expansion method for nonlinear Schrödinger equation with third-order dispersion 53, 331 (2021).
Kong, L. Q. & Dai, C. Q. Some discussions about variable separation of nonlinear models using Riccati equation expansion method. Nonlinear Dyn. 81, 1553–1561 (2015).
Shen, S. F., Pan, Z. L. & Zhang, J. Variable separation approach to solve nonlinear systems. Commun. Theor. Phys. 42, 565–567 (2004).
Wang, X. B., Tian, S. F., Feng, L. L., Yan, H. & Zhang, T. T. Quasiperiodic waves, solitary waves and asymptotic properties for a generalized (3 + 1)-dimensional variable-coefficient B-type Kadomtsev-Petviashvili equation. Nonlinear Dyn. 88, 2265–2279 (2017).
Zhang, R. F., Bilige, S., Liu, J. G. & Li, M. C. Bright-dark solitons and interaction phenomenon for p-gBKP equation by using bilinear neural network method. Phys. Scr. 96, 025224 (2020).
Niu, X. X., Liu, Q. P. & Xue, L. L. Darboux transformations for the supersymmetric two-boson hierarchy. Acta Appl. Math. 180, 12 (2022).
Chen, Y. & Wang, Q. Extended Jacobi elliptic function rational expansion method and abundant families of Jacobi elliptic function solutions to (1+1)-dimensional dispersive long wave equation. Chaos Soliton. Fract. 24, 745–757 (2005).
Ma, W. X. Lump solutions to the Kadomtsev–Petviashvili equation. Phys. Lett. A 379, 1975–1978 (2015).
Kottakkaran, S. N. et al. Novel multiple soliton solutions for some nonlinear PDEs via multiple exp-function method. Res. Phys. 21, 103769 (2021).
Ullah, M. S., Roshid, H. O. & Ali, M. Z. New wave behaviors and stability analysis for the (2+1)-dimensional Zoomeron model. Opt. Quant. Electron. 56, 240 (2024).
Bilal, M., Younas, U. & Ren, J. Dynamics of exact soliton solutions to the coupled nonlinear system using reliable analytical mathematical approaches. Commun. Theor. Phys. 73(8), 085005 (2021).
Kottakkaran, S. N., Onur, A. I., Jalil, M., Mohammad, S. & Danyal, S. Analytical behavior of the fractional Bogoyavlenskii equations with conformable derivative using two distinct reliable methods. Res. Phys. 22, 103975 (2021).
Hong, X., Jalil, M., Onur, A. I., Arshad, I. A. A. & Mahyuddin, K. M. N. Multiple soliton solutions of the generalized Hirota–Satsuma–Ito equation arising in shallow water wave. J. Geom. Phys. 170, 104338 (2021).
Muhammad, I. A., Maria, M., Waqas, A. F. & Sheikh, Z. M. Precise invariant travelling wave soliton solutions of the Nizhnik–Novikov–Veselov equation with dynamic assessment. Optik 294, 171438 (2023).
Waqas, A. F., Muhammad, A. B., Ali, A., Magda, A. E. R. & Sayed, M. E. D. Exact fractional soliton solutions of thin-film ferroelectric material equation by analytical approaches. Alex. Eng. J. 78(1), 483–497 (2023).
Bilal, M. & Ahmad, J. A variety of exact optical soliton solutions to the generalized (2+1)-dimensional dynamical conformable fractional schrdinger model. Res. Phys. 33, 105198 (2022).
Abdul, H. G. et al. Application of three analytical approaches to the model of ion sound and Langmuir waves. Pramana 98, 46 (2023).
Younas, U., Ren, J., Sulaiman, T. A., Bilal, M. & Yusuf, A. On the lump solutions, breather waves, two-wave solutions of (2+1)-dimensional pavlov equation and stability analysis. Mod. Phys. Lett. B 36(14), 2250084 (2022).
Onur, A. I., Jalil, M. & Mohammad, S. Lump wave solutions and the interaction phenomenon for a variable-coefficient Kadomtsev–Petviashvili equation. Comput. Math. Appl. 78(8), 2429–2448 (2019).
Zhang, H., Jalil, M., Gurpreet, S., Onur, A. I. & Angelina, O. Z. N-lump and interaction solutions of localized waves to the (2 + 1)-dimensional generalized KP equation. Res. Phys. 25, 104168 (2021).
Zhang, M., Xie, X., Jalil, M., Onur, A. I. & Gurpreet, S. Characteristics of the new multiple rogue wave solutions to the fractional generalized CBS-BK equation. J. Adv. Res. 38, 131–142 (2022).
Zhou, X., Onur, A. I., Jalil, M., Gurpreet, S. & Nalbiy, S. T. N-lump and interaction solutions of localized waves to the (2+1)-dimensional generalized KDKK equation. J. Geom. Phys. 168, 104312 (2021).
Bilal, M., Ur-Rehman, S. & Ahmad, J. Lump-periodic, some interaction phenomena and breather wave solutions to the (2+1)-rth dispersionless dym equation. Mod. Phys. Lett. B 36(2), 2150547 (2022).
Gu, Y. et al. Variety interaction between \(k\)-lump and \(k\)-kink solutions for the (3+1)-D Burger system by bilinear analysis. Res. Phys. 43, 106032 (2022).
Ren, J., Onur, A. I., Hasan, B. & Jalil, M. Multiple rogue wave, dark, bright, and solitary wave solutions to the KP-BBM equation. J. Geom. Phys. 164, 104159 (2021).
Ullah, M. S. Interaction solution to the (3+1)-D negative-order KdV first structure. Part. Differ. Equ. Appl. Math. 8, 100566 (2023).
Ding, C. C. et al. Nonautonomous breather and rogue wave in spinor Bose–Einstein condensates with space-time modulated potentials. Chin. Phys. Lett. 4, 9–13 (2023).
Wazwaz, A. M. Integrable (3+1)-dimensional Ito equation: variety of lump solutions and multiple-soliton solutions. Nonlinear Dyn. 109, 1929–1934 (2022).
Zhang, R. F. & Li, M. C. Bilinear residual network method for solving the exactly explicit solutions of nonlinear evolution equations. Nonlinear Dyn. 108, 521–531 (2022).
Guo, J., He, J., Li, M. & Mihalache, D. Multiple-order line rogue wave solutions of extended Kadomtsev–Petviashvili equation. Math. Comput. Simulat. 180, 251–257 (2021).
Ullah, M. S., Ahmed, O. & Mahbub, M. A. Collision phenomena between lump and kink wave solutions to a (3+1)-dimensional Jimbo–Miwa-like model. Part. Differ. Equ. Appl. Math. 5, 100324 (2022).
Wazwaz, A. M., Weaam, A. & El-Tantawy, S. A. Analytical study on two new (3+1)-dimensional Painlevé integrable equations: kink, lump, and multiple soliton solutions in fluid mediums. Phys. Fluids 35, 093119 (2023).
Ullah, M. S., Mostafa, M., Ali, M. Z., Roshid, H. O. & Mahinur, A. Soliton solutions for the Zoomeron model applying three analytical techniques. PLoS One 18(7), e0283594 (2023).
Waqas, A. F. et al. The formation of solitary wave solutions and their propagation for Kuralay equation. Res. Phys. 52, 106774 (2023).
Baal, M., Shafqat, U. R. & Ahmad, J. Dispersive solitary wave solutions for the dynamical soliton model by three versatile analytical mathematical methods. Eur. Phys. J. Plus 137, 674 (2022).
Waqas, A. F. et al. The computation of Lie point symmetry generators, modulational instability, classification of conserved quantities, and explicit power series solutions of the coupled system. Res. Phys. 54, 107126 (2023).
Ullah, M. S., Roshid, H. O. & Ali, M. Z. New wave behaviors of the Fokas–Lenells model using three integration techniques. PLoS One 18(9), e0291071 (2023).
Bilal, M., Hu, W. & Ren, J. Different wave structures to the Chen–Lee–Liu equation of monomode fibers and its modulation instability analysis. Eur. Phys. J. Plus 136(4), 385 (2021).
Waqas, A. F. & Salman, A. A. Q. The explicit power series solution formation and computationof Lie point infinitesimals generators: Lie symmetry approach. Phys. Scr. 98, 125249 (2023).
Sheikh, Z. M., Muhammad, I. A. & Waqas, A. F. Solitary travelling wave profiles to the nonlinear generalized Calogero–Bogoyavlenskii–Schiff equation and dynamical assessment. Eur. Phys. J. Plus 138, 1040 (2023).
Funding
Project supported by National Natural Science Foundation of China (Grant No. 12161048), Doctoral Research Foundation of Jiangxi University of Chinese Medicine (Grant No. 2021WBZR007) and Jiangxi University of Chinese Medicine Science and Technology Innovation Team Development Program (Grant No. CXTD22015).
Author information
Authors and Affiliations
Contributions
L.J.G wrote the main manuscript text and prepared all figures. All authors reviewed the manuscript.
Corresponding author
Ethics declarations
Competing interests
The author declares no competing interests.
Additional information
Publisher's note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Liu, JG. Soliton structures for the (3 + 1)-dimensional Painlevé integrable equation in fluid mediums. Sci Rep 14, 11581 (2024). https://doi.org/10.1038/s41598-024-62314-6
Received:
Accepted:
Published:
Version of record:
DOI: https://doi.org/10.1038/s41598-024-62314-6
Keywords
This article is cited by
-
Lump–Breather Interactions and Inelastic Wave Dynamics in KdV Hierarchy Systems via the Bilinear Neural Network-Based Approach
International Journal of Theoretical Physics (2025)
-
Investigating higher-dimensional nonlinear evolution equation: dynamics of waves and multistability in fluid mediums
Modeling Earth Systems and Environment (2025)
-
Bilinear Bäcklund Transformations, as well as N-Soliton, Breather, Fission/Fusion and Hybrid Solutions for a (3+1)-Dimensional Integrable Wave Equation in a Fluid
Qualitative Theory of Dynamical Systems (2025)
-
Bifurcation analysis, phase portrait, and exploring exact traveling wave propagation of M-fractional (3 + 1) dimensional nonlinear equation in the fluid medium
Optical and Quantum Electronics (2025)
-
Multiple Soliton Asymptotics in a Nonlinear Optical Fiber
Qualitative Theory of Dynamical Systems (2025)
