
Abstract
This study aims at the controllability of acoustically manipulated non-contact aggregation of bi-particle. Based on the acoustic wave radiation model of the transducer and the acoustic wave interference theory, the mathematical model between the spatial levitation point and the phase of the phased array ultrasonic array unit is established. A double-sided phased array test system was developed and the phase calculation algorithm for independently manipulating bi-particle was optimized. The algorithm is capable of independently distributing the energy applied to each levitation point. Through simulation and experiment, the horizontally aggregation characteristics of two levitated particles are investigated, and a interesting relationship between particles aggregation and standing wave phase difference is revealed, which follows the law of “attraction in the same phase but repulsion in the opposite phase”. By adjusting the tilt angle of the standing wave acoustic trap, the critical distance when particles to accelerate and collision is sharply reduced from 1.5λ to 0.5λ, which provides a new perspective and potential application path for acoustic manipulation technology.
Similar content being viewed by others
Introduction
Acoustic manipulation uses the acoustic radiation force generated by high-intensity ultrasonic waves on the surface of objects to capture particles. The technology is employed in a variety of industrial sectors, including electronic assembly1, chemical pharmaceuticals2,3, biotechnology4,5 and human medicine6, where the handling of fragile and breakable components is frequently required. Conventional manipulation techniques necessitate direct contact with the target object, which inevitably results in contamination of the manipulated target or scratches on its delicate surface. The current non-contact manipulation methods mainly include magnetic manipulation7,8, optical tweezers manipulation9,10, electrostatic manipulation and acoustic manipulation11,12. Since acoustic manipulation does not necessitate the presence of specific physical properties in the objects to be manipulated, the levitated particles do not require properties such as ferromagnetism or light transmittance13. Acoustic manipulation can be used to control liquids14,15, solids16 and even smaller objects, including living organisms17,18. It does not cause damage to the manipulated object19. Consequently, acoustic manipulation has emerged as an optimal tool in the domains of biological cells, chemical reactions, and precision microelectronics, due to its safety, stability, ease of control, and robust manipulation capabilities20.
With the development of acoustic technology in recent years, it has become possible to use acoustic technology to manipulate particles to dynamically translate and rotate21 in space. D. Foresti et al. for the first time manipulated elongated objects in a collaborative manner through the use of ultrasonic standing wave nodes22,23,24,25, which can translate and rotate objects beyond their wavelengths so that the manipulated objects are no longer limited by the wavelength of the manipulated acoustic wave and analyzed the secondary acoustic radiation force between two particles in close proximity, but still used standing wave nodes to capture the manipulated targets, and acoustic reflective elements to limit the range of their device use26. Koyama and Nakamura27 developed a levitation system consisting of a planar reflector and a transducer array. By changing the phase between the transducers, ethanol droplets can be transported in a two-dimensional plane at a specific height, and two droplets can be manipulated to aggregate, with the presence of a short-range acceleration prior to droplet aggregation, which results in rapid aggregation of droplets in close proximity and inhibits independent manipulation. Marzo et al. broke through the limitations of one-dimensional arrays and developed a holographic acoustic tweezer technology. By arranging the transducers in two or even three dimensions, the technology offers the same flexibility as optical tweezers, enabling three-dimensional trapping of particles and the manipulation of multiple particles. However, the interaction and aggregation process between particles are not studied, and when the distance between particles is less than 1.5λ, the rapid aggregation inhibits independent manipulation28,29.
This paper examines the characteristics of non-contact independent manipulation of two particles in space to achieve aggregate collision. A double-sided phased array acoustic levitation system was developed, and a phase calculation algorithm was designed that can independently manipulate two particles simultaneously by controlling the ultrasonic phased array emission field. The algorithm is capable of automatically distributing the energy applied to each levitation point in accordance with the mass of the levitated particles. Furthermore, augmenting the number of levitation points enables the dynamic and independent manipulation of multiple particles. Based on this, the aggregation and collision characteristics of two particles were investigated, and the aggregation characteristics of two particles manipulated by in-phase vertical standing waves, vertical standing waves with a phase difference of π, and tilted standing waves were analyzed. By adjusting the tilt angle of the standing wave acoustic trap30, the current minimum controllable distance between particles is sharply reduced from 1.5λ to 0.5λ.
Result
Particle manipulation methods
To achieve the levitation and manipulation of objects, a potential energy field needs to be constructed so that the levitation force applied to the levitated object points to the preset levitation point. This is achieved by the construction of a local standing wave node in the space. Two 16 × 16 transducer arrays are utilized to form a double-sided phased array, with a spacing of 200 mm between the two arrays. An algorithm has been developed to construct a high-intensity focus at any point in space. The focus of the lower array is located at λ/4 below the preset levitation point, while the high-intensity focus constructed by the upper array is located at λ/4 above the preset levitation point. The localized standing wave field is constructed by utilizing the interference between the focusing points of the acoustic beam output from the upper and lower ultrasonic transducers. This interference is employed to construct a local standing wave field. As shown in Fig. 1, at this local standing wave node, the trapping forces31 in the three dimensions are convergent, enabling the particles to be bound at this position.

A single local standing wave node is constructed by a double-sided transducer array. (a) The pressure amplitude of the local standing wave field is constructed by focusing on a single point in the transducer array in space; (b) The constructed local standing wave node in the force in the x-axis direction; (c) The force in the z-axis direction of the constructed local standing wave node.
On the basis of generating an acoustic trap at any of the above points, by dynamically adjusting the spatial position of the acoustic trap, a slight deviation occurs between the levitated object and the acoustic trap at the target levitation point. At this time, the levitated object will be affected by the new acoustic trap. The effect of the acoustic radiation force prompts the object to move to the target position, as illustrated in Fig. 2. Through this method, the predetermined motion trajectory is discretized into multiple levitated points, and the spatial position of the acoustic trap is continuously changed so that the levitated object tracks the preset trajectory in space. The smaller the spacing between neighboring discrete points, the smaller the change in the acoustic radiation force on the object and the smoother the motion.

(a–c) Schematic diagram of the process of manipulating particles to move in space; (a) The particle is restrained at the nodes of the constructed local standing wave acoustic trap, and the black arrows indicate the distribution of force; (b) A schematic diagram showing the relative position of the particle and the moved standing wave node when the constructed local standing wave acoustic trap moves to the right. The black arrow indicates the distribution of force; (c) The particle is moved to the position of the moved standing wave node under the action of acoustic radiation force; (d,e) Schematic diagram of the constructed local standing wave node movement. The upper and lower square areas are the planes where the transducer array is located. The single cylinder above represents the transducer, and the color of the transducer represents its phase. The gray dotted line represents the acoustic line, the black dotted line is the auxiliary line, used to indicate the location of the force convergence area, and the pink dotted line is the straight line where the force convergence area moves; (f) The correspondence between the color and phase of each unit in the transducer array.
The manipulation of two-particle aggregation collisions by an in-phase vertical standing wave trap
To manipulate two particles for aggregate collision, two local standing wave nodes capable of independent control need to be constructed.. The algorithm developed for this purpose allows the number of high-intensity focus points created to be increased, the high-intensity focus point constructed by the upper array is also located directly above the lower array construction at λ/2. Thus, two local vertical standing wave nodes that can independently manipulate two particles are constructed, as shown in Fig. 3.

Two vertical local standing wave nodes were constructed from a double-sided transducer array that can be independently manipulated. The particle on the left is particle A, and the particle on the right is particle B. (a) The acoustic pressure amplitude of two independently controllable vertical local standing wave fields constructed in space. (b) The force of the constructed local standing wave node in the x-axis direction. (c) The force of the constructed local standing wave node in the z-axis direction.
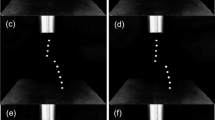
In the double levitation movement and aggregation test, particle A is controlled to move toward particle B with a step length of 0.1 mm, and the center position of the levitation is tracked. The real-time displacement of the two balls in the X-axis direction is shown in Fig. 4 and Move S1. The levitated particles can move according to the expected suspended position before converging, each time the levitation position of manipulated particle A is changed, particle B will be disturbed and produce weak vibration, the acoustic radiation force acting on the particles can be approximated by the restoring force of the spring, and ultimately stabilized at the equilibrium point by the damping effect of the air resistance, and the intensity of the disturbance is increased with the shortening of the spacing between the two particles. When the distance between the two particles is less than approximately 1.5λ (12.2 mm), particle A and B undergo an accelerated aggregation collision, resulting in the particles being eventually bound in the same levitation point after aggregation.

The preset levitation position and the actual levitation position of the two particles in the x-axis direction. When t = 0 s, the two particles are positioned at the preset levitation point. The initial spatial position coordinates are (53.8, 87, 100) and (93.5, 87, 100) respectively. When t = 2 s, the left particle is controlled to move to the right particle, and when t = 20.7 s, the two particles rapidly aggregate.
The interaction of incident acoustic waves with particles results in scattering and transmission, which in turn leads to the interference of the scattered waves with the incident waves and those generated by other particles32, thus creating a complex acoustic field between the particles. These interferences give rise to forces between particles, namely secondary acoustic radiation forces. The distance between two particles has a considerable effect on the scattering force. When the distance between the two particles is greater than 1.5λ, the secondary acoustic radiation force generated by the scattering wave is relatively weak, allowing the particles to remain bound in the acoustic traps and to be independently manipulated. However, when the distance between the particles is less than 1.5λ, the secondary acoustic radiation force is greater than the acoustic radiation force of the constructed acoustic trap, resulting in the two particles to accelerate their aggregation and collision. This phenomenon is similar to "like-phase attraction".
In-phase tilted standing wave acoustic trap manipulates bi-particle aggregation collisions
The axial acoustic radiation force exerted on the particles within the standing wave acoustic trap is greater than the radial acoustic radiation force. Consequently, the construction of a tilted local standing wave field axial acoustic radiation force in the horizontal direction of the force can offset a portion of the secondary acoustic radiation force resulting from scattering. Let the focus point created by the upper array be located at λ/2 directly above the lower array to construct a vertical standing wave node. By modifying the x-axis and y-axis coordinates of the focal point of the transducer array above to deviate from the x-axis and y-axis coordinates of the high-intensity focal point created by the transducer array below, but the distance between the two constructed focuses is always λ/2, thereby constructing a tilted standing wave acoustic trap, as shown in Fig. 5. The tilt angle of the acoustic trap is primarily determined by the offset distance in the x-axis and y-axis directions of the high-intensity focus constructed by the upper and lower transducer arrays.

Acoustic pressure diagram of two tilted local standing wave nodes constructed from a double-sided transducer array that can be independently manipulated.
In the experiment, the tilted local standing wave acoustic trap manipulation of particles aggregation properties is explored. The real-time displacement of the two particles in the X-axis direction is shown in Fig. 6 and Move S2. This method allows for the realization that the minimum independently controllable distance between particles is approximately 0.5λ (4.5 mm). As the distance between the two particles decreases, the secondary acoustic radiation force generated by scattering increases in strength. When the distance between the particles is less than 0.5λ, the horizontal component of the constructed local tilted standing wave axial acoustic radiation force is insufficient to offset the secondary acoustic radiation force. Consequently, the two particles continue to accelerate aggregation over a short distance, but the acceleration distance is reduced to 0.5λ.

When t = 0 s, two particles are positioned at the predetermined levitation point. The initial spatial position coordinates are (56, 87, 100) and (88, 87, 100), respectively. When t = 2 s, the two particles start to move. When t = 18 s, the distance between the particles is approximately 0.5λ (4.5 mm). When the particles move closer to each other again, the two particles quickly aggregate.
Vertical standing waves with phase difference π manipulate two particles to repel each other at close range
The method of constructing two local standing wave nodes (A, B) with a phase difference of π and that can be independently manipulated. Through our phase calculation algorithm, the upper and lower transducer arrays create two independent and position-controllable high-intensity focal points. The two focal points constructed by the lower array are located λ/4 directly below the preset levitation point A and λ/4 directly above the preset levitation point B, and the two focal points constructed for the upper array are located at λ/4 directly above the predetermined levitation point A and at λ/4 directly below the predetermined levitation point B. As shown in Fig. 7, two local standing wave fields that can be independently controlled and have a phase difference of π are constructed.

Vertically independent and controllable local standing wave node acoustic pressure diagram with a phase difference of π constructed by a double-sided transducer array.
In the experiment, we observed that a special phenomenon occurred when particle A was manipulated to gradually approach particle B. When the distance between the two particles was less than 1.2λ (10.4 mm), particle A was unable to get closer to particle B. This phenomenon can be attributed to the phase difference between the two constructed local vertical standing wave fields is π. When the distance between the two local standing wave fields is less than 1.2λ (10.4 mm), the positive acoustic pressure area of the local standing wave on the left and the negative pressure area of the local standing wave on the right cancel each other out. As the local standing wave on the left gets closer to the local standing wave on the right, the cancellation effect becomes more pronounced, resulting in a reduction in acoustic pressure intensity within the central region of the left and right local standing wave acoustic traps. Consequently, the local standing wave field on the left to be biased toward the position of the preset levitation point on the left, and the local standing wave field on the right to be biased toward the preset levitation point on the right. Accordingly, when the distance between the two preset levitation points is less than 1.2λ (10.4 mm), and the left particle is manipulated to come closer to the right particle, the left particle will deviate from the preset levitation point to the left, while the right particle will deviate to the right. This results in a phenomenon analogous to maneuvering particle A to the right toward particle B while pushing particle B away; the real-time displacement of the two particles in the X-axis direction is shown in Fig. 8 and Move S3.

At t = 0 s, the two particles are placed at the preset levitation point. The initial spatial position coordinates are (53.7, 87, 100) and (92.6, 87, 100) respectively. When t = 2 s, the left particle is manipulated to move toward the right particle. At t = 18.3 s, the distance between the two particles is about 1.2λ (10.4 mm). When the left particle is manipulated to move to the right particle, the left particle can no longer move completely according to the preset levitation point, while the position of the right preset levitation point remains unchanged, but the actual position has begun to move to the right, and the two particles cannot come together.
Discussion
This study provides a comprehensive analysis of the aggregation and collision characteristics of double particles in acoustic levitation and systematically explores the specific mechanisms of in-phase standing waves, anti-phase standing waves (the phase difference is precisely controlled to π), and oblique standing waves in particle manipulation. By precisely adjusting the tilt angle of the standing wave trap, the minimum controllable distance between particles is significantly reduced from 1.5λ to 0.5λ. This enhancement markedly improves the maneuvering precision of acoustic levitation technology. When the phase difference of the local standing wave field is set to π and the distance between two particles reaches 1.2λ, a distinctive phenomenon of interparticle repulsion is observed. This discovery highlights the close correlation between the aggregation properties of particles and the standing wave phase difference, which is characterized by the interesting law of "same-phase attraction, opposite-phase repulsion." This discovery not only offers new insights into the field of two-particle manipulation but also suggests potential avenues for future developments in acoustic levitation technology.
In summary, this study provides a robust theoretical foundation for the precise manipulation of acoustic levitation technology, which is based on rigorous experimental design and in-depth theoretical analysis. It demonstrates the meticulousness and foresight of scientific research in this field. In the future, our research will continue to focus on the realization of zero-distance control between particles and the exploration of separation techniques for particles following aggregation. It is anticipated that the methodology proposed in this study will provide a robust theoretical foundation and experimental framework for the further realization of acoustically manipulated controlled aggregation of two particles. Additionally, it is expected that this methodology will serve as a reliable method of non-contact manipulation for the cutting-edge fields of biology, pharmaceutics, and chemical analysis.
Experimental platform and methods
Hardware
The complete particle manipulation test platform is shown in Fig. 9. It primarily comprises a computer, ultrasonic phased array, signal generator, power supply, and oscilloscope. Two-sided 16 × 16 total of 512 10 mm-diameter 40 kHz ultrasonic transducer arrays are employed. The propagation medium is air, and the distance between the two sides of the transducer array is 200 mm. The phase calculation algorithm which is deployed in the ROS system, transmits the calculated phase data of each transducer to the FPGA via the serial port. The FPGA can be considered to function as the equivalent of the cerebellum of the control system, performing an analysis of the received phase data and exerting control over each transducer via the IO port of the FPGA. The output voltage of the FPGA's IO port is constrained to 3.3 V by the chip's current, which precludes direct driving of the transducer. The control signal is amplified to 16 V through a single-channel high-speed gate driver (UCC27517), and the amplified signal is then output to the transducer. An oscilloscope is employed for the purpose of calibrating the phase of each transducer. The manipulated particles are expanded polystyrene (EPS) particles with an approximate diameter of 3 mm.

(a) is the particle manipulation system experimental platform, (b) is a partial view of the transducer array.
Methods
When the transducer operates at a constant amplitude and frequency, the complex acoustic pressure \({P}_{n}\) generated by a circular piston transducer numbered \(n\) in a phased array at a point \(r\) in space can be expressed as follows:
where \(i\) is the imaginary unit; \(p\) is the constant that defines the amplitude power of the transducer; \(A\) is the peak-to-peak value of the excitation transducer voltage; \(\theta \) is the angle between the normal direction of the transducer surface and the vector radius \(r\); \({D}_{f}\left(\theta \right)=\frac{2{J}_{1}(kasin\theta )}{kasin\theta }\) is the far-field directivity function, where \({J}_{1}(\cdot )\) is the first-order Bessel function33,34, \(a\) is the piston radius, \({d}_{n}\) is the distance from the spatial position \(r\) to the ultrasonic transducer unit, \(k=\frac{2\pi }{\lambda }\) is the wave number, \(\lambda \) is the wavelength; \(\varphi \) is the initial phase of the ultrasonic transducer, \(\varphi +k{d}_{n}\) represents the phase of the acoustic wave at \(r\).
For an array composed of N transducers, as shown in Fig. 10, multiple columns of acoustic waves propagating in the same space satisfy the linear superposition property, so the composite acoustic field acoustic pressure can be obtained by summing up the contribution of each source, and the total acoustic pressure at the target levitation point can be expressed as:

Schematic diagram of ultrasonic transducer array.
In order to manipulate particle aggregation collisions, it is necessary to construct two or more acoustic fields capable of levitating particles simultaneously. These fields are expressed as matrices for computational convenience:
where \(M\) is the number of controlled particles; \(N\) is the number of transducers in the ultrasonic transducer array; \(O\) is the complex amplitude matrix of the target levitation point acoustic pressure; \(G\) is the propagation matrix between the transducer and the target point, \({g}_{ij}=\frac{{D}_{f}(\theta )}{{d}_{ij}}{e}^{i(\varphi +k{d}_{n})}\) is the i-th to j-th transducer in the transducer array Propagation of target points; the \(P\) matrix represents the amplitude and phase of the transducer in the phased array \({p}_{0}=pA\); \(J\) is a set matrix of weighting coefficients assigned to the acoustic pressure at each levitation point. These coefficients can be adjusted according to the desired quality of the target being manipulated.
Objective function
In order to maximize the efficiency of energy utilization, an objective function with the independent variable being the phase of the transducer can be established:
where, \({\varphi }_{\text{i}}\) represents the phase of the i-th transducer, and \({o}_{j}\) represents the acoustic pressure amplitude of the j-th target point.
According to Gor’Kov’s acoustic radiation force potential35, the acoustic radiation force experienced by particle can be expressed as:
where \(\nabla \) is the Laplacian operator, \(V\) is the volume of the levitated matter, \(\omega \) is the angular frequency of the acoustic wave, \(\rho \) is the density, \(c\) is the speed of acoustic, and the subscripts \(0\) and \(p\) represent the air medium and the material of the levitated matter respectively.
Equation (8) calculates the total acoustic pressure acting on the preset levitation points, When combined with Eq. (9), the acoustic radiation force acting on the levitated particles can be calculated. Furthermore, for multi-particle levitation, the energy acting on different levitation points can be adjusted by adjusting the value of the weighting coefficients matrix \(J\).
Data availability
The authors confirm that the data supporting the findings of this study are available within the article.
References
Wang, T. et al. Dexterous acoustic trapping and patterning of particles assisted by phononic crystal plate. Appl. Phys. Lett. 106, 163504 (2015).
Cai, F. et al. Acoustic trapping of particle by a periodically structured stiff plate. Appl. Phys. Lett. 99, 253505 (2011).
Ma, Z., Collins, D. J., Guo, J. & Ai, Y. Mechanical properties based particle separation via traveling surface acoustic wave. Anal. Chem. 88, 11844–11851 (2016).
Ahmed, D. et al. Rotational manipulation of single cells and organisms using acoustic waves. Nat. Commun. 7, 11085 (2016).
Olson, R. J., Shalapyonok, A., Kalb, D. J., Graves, S. W. & Sosik, H. M. Imaging FlowCytobot modified for high throughput by in-line acoustic focusing of sample particles. Limnol. Oceanogr. Methods 15, 867–874 (2017).
Li, F. et al. Phononic-crystal-based acoustic sieve for tunable manipulations of particles by a highly localized radiation force. Phys. Rev. Appl. 1, 051001 (2014).
Khamesee, M. B. & Shameli, E. Regulation technique for a large gap magnetic field for 3D non-contact manipulation. Mechatronics 15, 1073–1087 (2005).
Tokura, S., Hara, M., Kawaguchi, N. & Amemiya, N. Contactless magnetic manipulation of magnetic particles in a fluid. J. Magn. Magn. Mater. 411, 68–78 (2016).
Padgett, M. & Bowman, R. Tweezers with a twist. Nat. Photon 5, 343–348 (2011).
Grier, D. G. A revolution in optical manipulation. Nature 424, 810–816 (2003).
Meng, L. et al. Precise and programmable manipulation of microbubbles by two-dimensional standing surface acoustic waves. Appl. Phys. Lett. 100, 173701 (2012).
Prisbrey, M. & Raeymaekers, B. Ultrasound noncontact particle manipulation of three-dimensional dynamic user-specified patterns of particles in air. Phys. Rev. Appl. 10, 034066 (2018).
Baudoin, M. & Thomas, J.-L. Acoustic tweezers for particle and fluid micromanipulation. Annu. Rev. Fluid Mech. 52, 205–234 (2020).
Brandt, E. H. Levitation in physics. Science 243, 349–355 (1989).
Yarin, A. L., Pfaffenlehner, M. & Tropea, C. On the acoustic levitation of droplets. J. Fluid Mech. 356, 65–91 (1998).
Andrade, M. A. B., Bernassau, A. L. & Adamowski, J. C. Acoustic levitation of a large solid sphere. Appl. Phys. Lett. 109, 044101 (2016).
Xie, W. J., Cao, C. D., Lü, Y. J., Hong, Z. Y. & Wei, B. Acoustic method for levitation of small living animals. Applied Physics Letters 89, 214102 (2006).
Sundvik, M., Nieminen, H. J., Salmi, A., Panula, P. & Hæggström, E. Effects of acoustic levitation on the development of zebrafish, Danio rerio, embryos. Sci. Rep. 5, 13596 (2015).
Meng, J., Mei, D., Jia, K., Fan, Z. & Yang, K. Contactless and non-invasive delivery of micro-particles lying on a non-customized rigid surface by using acoustic radiation force. Ultrasonics 54, 1350–1357 (2014).
Sriphutkiat, Y. & Zhou, Y. Particle manipulation using standing acoustic waves in the microchannel at dual-frequency excitation: Effect of power ratio. Sensors Actuat. A Phys. 263, 521–529 (2017).
Foresti, D. Acoustophoretic contactless elevation, orbital transport and spinning of matter in air. Phys. Rev. Lett. https://doi.org/10.1103/PhysRevLett.112.024301 (2014).
Foresti, D., Nabavi, M., Klingauf, M., Ferrari, A. & Poulikakos, D. Acoustophoretic contactless transport and handling of matter in air. Proc. Natl. Acad. Sci. 110, 12549–12554 (2013).
Baresch, D., Thomas, J.-L. & Marchiano, R. Spherical vortex beams of high radial degree for enhanced single-beam tweezers. J. Appl. Phys. 113, 184901 (2013).
Whymark, R. R. Acoustic field positioning for containerless processing. Ultrasonics 13, 251–261 (1975).
Sepehrirahnama, S., Lim, K.-M. & Chau, F. S. Numerical study of interparticle radiation force acting on rigid spheres in a standing wave. J. Acoust. Soc. Am. 137, 2614–2622 (2015).
Foresti, D., Sambatakakis, G., Bottan, S. & Poulikakos, D. Morphing surfaces enable acoustophoretic contactless transport of ultrahigh-density matter in air. Sci. Rep. 3, 3176 (2013).
Noncontact ultrasonic transportation of small objects over long distances in air using a bending vibrator and a reflector by Daisuke Koyama, Kentaro Nakamura. https://doi.org/10.1109/tuffc.2010.1527. OA.mg.
Marzo, A. & Drinkwater, B. W. Holographic acoustic tweezers. Proc. Natl. Acad. Sci. 116, 84–89 (2019).
Marzo, A. et al. Holographic acoustic elements for manipulation of levitated objects. Nat. Commun. 6, 8661 (2015).
Baresch, D., Thomas, J.-L. & Marchiano, R. Observation of a single-beam gradient force acoustical trap for elastic particles: Acoustical tweezers. Phys. Rev. Lett. 116, 024301 (2016).
Single beam acoustic trapping | Applied Physics Letters | AIP Publishing. https://pubs.aip.org/aip/apl/article-abstract/95/7/073701/324327/Single-beam-acoustic-trapping?redirectedFrom=fulltext.
Lopes, J. H., Azarpeyvand, M. & Silva, G. T. Acoustic interaction forces and torques acting on suspended spheres in an ideal fluid. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 63, 186–197 (2016).
Courtney, C. R. P. et al. Dexterous manipulation of microparticles using Bessel-function acoustic pressure fields. Appl. Phys. Lett. 102, 123508 (2013).
Seah, S. A., Drinkwater, B. W., Carter, T., Malkin, R. & Subramanian, S. Correspondence: Dexterous ultrasonic levitation of millimeter-sized objects in air. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 61, 1233–1236 (2014).
Bruus, H. Acoustofluidics 7: The acoustic radiation force on small particles. Lab Chip 12, 1014–1021 (2012).
Acknowledgements
This work has been supported by the National Natural Science Foundation of China under Grant No.52175460 and 52305462.
Author information
Authors and Affiliations
Contributions
J.W. and L.W. contributed conceptualization, methodology and validation; J.W. contributed software analysis, investigation, writing, review and editing; L.W. contributed project administration and funding supported; J.W., Z.W. contributed experiment; L.Z. and H.W. contributed supervision and resources. All authors have read and agreed to the published version of the manuscript.
Corresponding author
Ethics declarations
Competing interests
The authors declare no competing interests.
Additional information
Publisher's note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Supplementary Information
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution-NonCommercial-NoDerivatives 4.0 International License, which permits any non-commercial use, sharing, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if you modified the licensed material. You do not have permission under this licence to share adapted material derived from this article or parts of it. The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by-nc-nd/4.0/.
About this article

Cite this article
Wu, J., Wu, L., Wang, Z. et al. Experimental research on the horizontally getting together behaviors of acoustically manipulated bi-particle. Sci Rep 14, 19429 (2024). https://doi.org/10.1038/s41598-024-70267-z
Received:
Accepted:
Published:
Version of record:
DOI: https://doi.org/10.1038/s41598-024-70267-z
