
Abstract
This paper presents the modelling and analysis process of the electrical power management system on board an electrified aircraft conforming to the More/All Electric Aircraft concept. The main objective of the study is to assess the stability of the Electric Power Distribution System under different operational conditions, including the aspect of constant power loads. The paper describes the structure of the system, in which the key role is played by a synchronous generator and a three-phase rectifier converting alternating current AC into direct current DC. To solve the problem, modeling methods in the Matlab/Simulink environment were used, which enabled the analysis of the dynamic properties of the system and the assessment of stability under various types of loads. The obtained test results show that the presence of constant power loads can lead to instability in the EPDS system, manifested by voltage and current oscillations exceeding the standards specified in the MIL-STD-704E standard. The paper also provides tools for predicting system stability without the need to conduct full stability tests, which is important for the design of modern aviation power systems. The final section of the work presents the research results obtained and the resulting significant insights and practical conclusions.
Similar content being viewed by others


Modern aviation, both military (Lockheed Martin) in relation to the military aircraft JSF (Joint Strike Fighter) F-35 and F-22 Raptor, and civil (Airbus, Boeing) in relation to the aircraft (A-380 and A-350 XWB, B-787), in line with the increasingly evolving trend of the MEA/AEA (More/All Electric Aircraft), is characterized by the dynamic development of the AAES (Advanced Aircraft Electrical Systems)1,2,3. Compared to traditional power supply systems, the mentioned AAES (EPS, PES) systems are characterized by innovative technological solutions in terms of their key components, which include two systems, i.e. the electro-energy power supply system, EPS (Electric Power System) and the energy-electronic power supply system, PES (Power Electronics System) and its main components, which include multi-pulse converters, among them (12-, 18- and 24-, 36-) pulse, including also DC/DC converters being the subject of the research in this article4,5,6. On-board electrical sources of modern aircraft electrical installations, including in particular electrified aircraft (MEA/AEA) in the form of generators or integrated starter/generator units, which are key components of advanced AAES power systems (EPS, PES) together with the power unit (main engine) generate the electricity required to power the electrical equipment of the aircraft (avionics, electrical appliances, flight instruments, etc.)7,8,9. In addition, other systems (e.g. pneumatic systems) are also essentially powered by the same on-board sources (generators, mechanically coupled starter/generator units), which definitely translates into the increasing demand for electricity generated on board a modern flying object10,11.
In modern aircraft from leading manufacturers (Lockheed Martin, Airbus, Boeing), the basic elements of the on-board electrical network form the framework of the electrified aircraft system (MEA/AEA), and in the context of energy transmission - the EPDS (Electric Power Distribution System) management system for electricity generation, processing and distribution, which plays a key role in the processes of electricity management for end devices (elements, devices, installations, etc.). In addition, along with the increasing size of modern aircrafts, advanced power systems have also been evaluated by adding, for example, a High Voltage Direct Current (HVDC) system, modern rectifier systems and systems that convert three-phase voltages and currents into their constant counterparts12. Thus, the high efficiency and reliability of the current electrical and avionic systems developed in the context of MEA/AEA are still prime design goals in industrial application, especially in the aerospace industry. Design solutions of electrical devices in this aspect are based on the variable transmission of AC alternating current produced at frequency of 400 Hz or on monolithic DC/DC converters, which places restrictions on distribution as well as on their overall efficiency and performance.

EPS with primary DC 270 V bus (HVDC EPS).
On-board power sources, including generators or starter/generator sets of modern aircraft are selected primarily in terms of peak voltage consumption, with limited overload capabilities, which obliges designers of modern electrical networks to compensate for the voltage transmitted through the power bus and causes that the advanced AAES power supply system (EPS, PES) ) should not be modified. Thus, a more effective solution will be if the loads take power from the two power buses, as a result of which better utilization can be obtained, which will result in better use of the available usable power of the on-board network of electrified aircraft13. Therefore, an example of a solution compatible with the MEA/AEA concept is the EPS system, shown in the figure above (Fig. 1), based on the symmetry of the components used (e.g. sources, transmission and distribution system, receivers, etc.), which are components of the on-board electrical network of a modern airplane. For the needs of the proposed solution, identical architectures were used, thus ensuring two-channel power supply (left engine, right engine), thanks to which it is possible to obtain a significant reduction of components generating electricity in each of the AAES power supply channels in the field of EPS system.
It should be noted that the discussed power supply system has the ability to maintain continuous functionality of operation not only during normal operation, but above all in the event of failure of one of the engines. The EPS system in each channel can be divided into three key power components, i.e. power generation, distribution and conversion of electricity. The main on-board sources for electricity generation are two generators (left and right, defined as ENG1 and ENG2). In addition, apart from on-board sources, there are emergency or backup sources in the form of accumulator batteries and fuel cells, intended for the accumulation of electricity, used as needed. It should be added that in devices that accumulate electricity, such as batteries, a much smaller amount of usable power is accumulated, and it should be remembered that accumulator batteries are the final power supply link of the aircraft. Other backup or auxiliary sources in terms of power supply are auxiliary power units APU (Auxiliary Power Unit) and the RAT (Ram Air Turbine), ensuring the supply of electricity to individual receivers during standby operation or in an emergency.
On the other hand, devices that protect the operation of generators in the event of negative phenomena, e.g. short-circuit, overvoltage, overload, etc., are GCU (Generator Control Unit) generators protection units for, among others to maintain the required output voltage of the generator (for aircraft B-787 230 VAC), regardless of the rotational speed and load. In addition, the GCU devices supervise the operation of the on-board power source (generator, starter/generator set) during single-channel operation, i.e. during a source or sources failure in one of the AAES power supply system channels within the EPS system, through the process of switching the damaged channel buses to properly functioning buses in the opposite channel through the GLC (Generator Line Contactor) of the system. All kinds of units, airframe electrical installations and energy components of a modern aircraft are powered autonomously by means of aircraft propulsion units in the form of main engines, therefore the frequency of the EPS power system sources varies, covering a wide range, among others depending on the functionality of the power unit or the type of aircraft (Airbus, Boeing), i.e. in the range from 360 to 900 Hz.
When analysing the advanced on-board power supply system of a modern aircraft, e.g. based on the power supply system used on the Boeing B-787, it should be noted that this system is in line with the trend of electrified aircraft (MEA/AEA). The system is based on four HVAC (High Voltage Alternating Current) high voltage AC buses for the distribution and transmission of on-board electricity: HVAC1-1, HVAC1-2 in the left channel and HVAC2-1 and HVAC2-2 in the right channel, respectively, all these 4 networks can be connected, depending on the need, by interconnecting circuits (control or safety devices, etc.). An important limitation regarding high voltage busbars (HVAC) to keep in mind is that none of the above buses can be powered by more than one power source at any one time or during operation. In terms of the on-board electricity management system, as part of the advanced AAES system in the field of EPS, two electricity distribution systems can be distinguished, namely: the main PEPDC (Primary Electrical Power Distribution Center) and the backup EEPDC (Emergency Electrical Power Distribution Center).
In terms of application, the main PEPDC system is designed to provide energy in the form of an electrical load to selected airframe electrical installations, e.g. IPS (Ice Prevention System), WIPS (Wing Ice Protection System), an environmental protection system against air pollutants ECS (Environment Control System), etc. The DC loads of individual electrical installations of the main system airframe (EEPDC) supplying electricity to end receivers are able to ensure the availability of power in the scope of the required electrical load in order to confirm the operability for the on-board electronic and avionic devices, which means that the electricity of the EEPDC system network of the electrified aircraft will be functionally supported for powering electronic and avionic devices in the event of any failure. In the event of a failure during the transmission of electricity, uninterrupted power supply to end receivers within the backup power supply system (PEPDC) should be ensured, taking into account the priority of power supply for key components and pilot-navigational systems. The on-board EPS power supply system, in line with the trend of electrified aircraft, cooperates in terms of functionality with a current rectifier in the form of a TRU (Transformer Rectifier Unit), obtained from an on-board power source (generator or starter/generator) and processed by a DC/DC converter. The three-phase current in the 230/400 V system is also sent to the EMI (Electromagnetic Interference) component, responsible for eliminating interference from radio-electronic devices.
Results
Mathematical model of a magnetic converter used in the on-board network of an electrified aircraft (MEA/AEA)
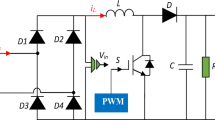
The equivalent diagram of a DC/DC converter based on the topology of the elements generating the electromagnetic field is presented in Fig. 2.

Block diagram of a magnetic DC/DC converter.
When making the initial analysis, it should be noted that the maximum (peak) power is an important parameter of both the DC/DC converter and the single-phase network converter, which are the key components for the DC voltage conversion process. The figure above shows that the converter supplying the bipolar input converter produces power with a certain reserve of electricity present on the DC supply bus in order to control the induced power changes in the frequency range of 400 Hz via a single-phase converter system. For an average AC output power of 1 kW, the peak instantaneous power will be 2 kW, according to the relationship (1) defined below:
If there is no place for accumulation of other signals on the DC voltage bus, the function of the proposed magnetic converter comes down to the transfer of a peak power of 2 kW not only at positive power, but also at negative power, because the voltage peak takes place both during the course of the cycle positive and negative. This is mainly due to the use of the on-board power supply system voltage compatible with the MEA/AEA concept. In view of the above, it should be noted that in the case under consideration, the DC input voltage of the magnetic converter is not constant, but will only match the instantaneous output power in terms of shape. Thus, in the worst case, the power rating of the magnetic converter will be 4:1. Considering the above solution with the use of a magnetic converter, it should be noted that in real conditions with regard to the functionality of the on-board electrical network of an electrified aircraft, the required load capacity of end elements (e.g. systems, installations, etc.) should be additionally taken into account so that the process of generating a constant power output for the purpose of keeping the operation in standby mode can be realized.
For the purpose of creating a mathematical model of voltage and current of a magnetic DC/DC converter system, based on the above analysis and taking into account the set of design specifications of the converter system for the on-board electrical network of an electrified aircraft compatible with the MEA/AEA trend, it is possible to determine the equations defining the induction values on each of the inductors and the capacitance on each of the capacitors, respectively. Taking into account the set of design specifications of the converter system for the aircraft electrical network in accordance with the MEA/AEA concept, it is possible to determine the equations describing the induction value for each inductor \(\:{\text{L}}_{\text{s}}\) and the capacitance \(\:{\text{C}}_{\text{s}}\) on each of the capacitors.
Conducting an analysis of the functionality of the magnetic converter in the switch-on state “\(\:\text{o}\text{n}\)” and the switch-off state “\(\:\text{o}\text{f}\text{f}\)” allows for obtaining equations of both voltages and currents flowing through each nonlinear element. In the steady state, the principles of the volt-second equilibrium of the exciter and the capacitor (amp-second) charge are realized in a continuous manner, i.e. all changes in the inductive currents and voltages on the capacitors in the time sequence, respectively, occur symmetrically. In addition, the switch-on state “\(\:\text{o}\text{n}\)” must directly resist changes during the changeover “\(\:\text{o}\text{f}\text{f}\)”. Therefore, using the equations from any of the analysed states together with the equation defining the phenomenon of electromagnetic induction, related to both the induction coil and the capacitance in the case of a capacitor (\(\:\text{U}=\text{L}\frac{\text{d}\text{i}}{\text{d}\text{t}}\:\text{a}\text{n}\text{d}\:\text{I}=\text{C}\frac{\text{d}\text{u}}{\text{d}\text{t}}\)), mathematical equations were obtained, respectively, for inductance and capacitance as a function of other known parameters related to the transforming system DC/DC. In turn, due to the fact that in the transforming system there are seven characteristic components describing the states occurring in the circuit, it is necessary to adopt a simplifying assumption. For this reason, small approximate values of the ripple voltage were used, which means that the ripple components of the waveforms can ultimately be omitted, and the waveforms of the voltage harmonic signals are treated as their average values. It is also necessary to adopt a simplification concerning ideal components (capacitors and coils) for this purpose, as it is very important and has a direct impact on the simplification of the complexity of these equations, without having a key impact on their final results. Based on the above analysis, a set of equations was obtained describing the processes taking place in the transforming system with the use of a magnetic converter (2):
In the next step of the analysis, in terms of the mathematical description of the current and voltage flow in the analysed converter, presents equations that define both the peak voltages and the current values of each component of the magnetic converter transformer, consisting of four capacitors, three inductors, two diodes and one switch. Therefore, the maximum currents at the input of the magnetic converter in the on-state can be written in the following form (3):
The maximum value of the current occurring at the end of the switch \(\:{\text{I}}_{\text{s}\text{w}\text{i}\text{t}\text{c}\text{h}}\) in the “\(\:\text{o}\text{f}\text{f}\)” state is equal to the sum of the input currents of both output coils, the mathematical notation of which can be presented in the form (4):
On the other hand, the current flowing through the semiconductor element (diodes) of the input converter system in the “\({\text{off}}\)” switch state, i.e. when the inductors are fully charged, i.e. when the currents are summed up by the diodes, can be presented in the form (5):
In turn, assuming that an equal distribution of the input current has been made between both outputs of the converter system, as a result of which the maximum current resulting from the flow through the capacitor may occur at the transition from the off state to the on state or at the transition from on to off state when the switch is in the “\({\text{off}}\)” position, i.e. when the current is equal to half the input current, or during the transition from the “\({\text{off}}\)” switch state to the “\({\text{on}}\)” switch state, i.e. when the current is the peak output current of the inductor, which can be present as (6):
The peak value of the capacitor output current is in the positive state with the switch in the “\({\text{off}}\)” position, while the peak value of the capacitor current in the negative state is in the form of an LC circuit, which can be written by the following Eq. (7):
For the purposes of determining the maximum voltage across the capacitors in the DC/DC conversion circuit, it must be assumed that this is the average voltage plus half of the peak-to-peak ripple voltage they experience depending on whether it is a peak-to-peak voltage or a voltage output. The voltage ripple is caused by the current flowing through the capacitors when the switch is in the “\(\:\text{o}\text{n}\)” or “\(\:\text{o}\text{f}\text{f}\)” position, due to a circuit change \(\:\text{I}=\text{C}\frac{\text{d}\text{u}}{\text{d}\text{t}}\). And, taking into account the “\(\:\text{o}\text{f}\text{f}\)” state, it is assumed that the input current of the inductor is divided evenly between the outputs of the magnetic converter elements - which is the appropriate and correct assumption in the case of balanced outputs, while otherwise (no balance), it is possible to divide the currents in proportion to depending on each output power. As a result, the following derivation (8) can be obtained:
In the next course of the analysis, by replacing their peak voltages with real voltages occurring in the considered system, you can present the voltage values on the capacitors in the form (9):
In the next stage of the analysis, while observing the circuit in the “\(\:\text{o}\text{f}\text{f}\)” state, it turned out that the voltage value on the switch coincides with the voltage value on the transfer capacitor (ignoring the forward supply voltage of the diode). In turn, the voltage determined at the switch is the maximum for the “\(\:\text{o}\text{f}\text{f}\)” state, i.e. when the capacitor is charged to the maximum voltage, so the peak voltage of the switch equals the peak voltage of the transfer capacitor. The mathematical notation can be presented as follows (10):
Likewise, observing the circuit in “\(\:\text{o}\text{n}\)” state reveals that the voltage across the diode \(\:{\text{U}}_{\text{C}\text{s}}\) is equal to the voltage of the transfer capacitor (ignoring the voltage drop across the converter). The diode voltage reaches its maximum value at the beginning of the transient period in the “\(\:\text{o}\text{n}\)” state (before the capacitor discharges), so the peak voltage across the diode is equal to the peak voltage of the transfer capacitor (11):
The input voltage of the inductor is equal to the input voltage in the “\(\:\text{o}\text{n}\)” state, therefore equal to the voltage across the switch minus the input voltage in the “\(\:\text{o}\text{n}\)” state (12):
The voltage across the coil is equal to the positive output voltage across the capacitor depending on whether the converter is in the on “\(\:\text{o}\text{n}\)” or off “\(\:\text{o}\text{f}\text{f}\)” state. Thus, the voltage existing in the coil circuit may be equal to the voltage loss between the diode and the negative output voltage of the capacitor or the negative output voltage of the capacitor depending on the condition of the converter (13):
Note that the peak output voltage on the capacitor with a positive value occurs at the moment of transition between the state of the switch “\(\:\text{o}\text{n}\)” and “\(\:\text{o}\text{f}\text{f}\)” when the capacitor is fully charged, so the maximum value of the peak voltage across the capacitor (in parallel connection) at the negative output occurs similar to the LC circuit with an inductor according to the following notation (14):
On the other hand, the peak voltage on the diode is equal to the voltage change between the circuit with the coil and the positive output voltage of the capacitor, and it arises at the beginning of the circuit’s switching state, when these capacitors are charged to the maximum voltage (15):
Stability problems of the EPDS system of electrified aircraft
In the opinion of the authors of this study, when examining the on-board EPDS system in accordance with the MEA/AEA trend, at least three groups of characteristic phenomena observed in the analysed system should be taken into account. The first group is identified with the attitude to the behavior of receivings. Leaving aside the details, one can express the conviction that the loads whose power consumption, both active and reactive, significantly decrease with the decrease of the supply network voltage, do not (or slightly affect) the development of the failure of the considered system, related to the loss of stability. Explaining this with the help of an example, it can be emphasized that the increase in current consumption (reactive power), usually by induction motors during the process of lowering the supply voltage, may result in the so-called an avalanche of voltages14,15, and may also lead to disruption of the stable functionality of the system operation. A certain protection against this negative phenomenon is to maintain a sufficiently high voltage level, even at the cost of limiting the supply of electricity to specific end receivers and switching to emergency or backup power supply. More detailed information on the characteristics of electricity collection is provided in the literature16.
The second group of the analysed EPDS system refers to the behavior of power sources, mainly generators in the system17. It should be noted that in this case, the interaction of generators on the on-board electric network and the electric network on electric energy sources (generators, integrated units of the starter/generator type, etc.) is important. The last group of the EPDS distribution system refers to the behavior of the electric network, its stiffness, i.e. the characteristics of the voltage changes of the network nodes in relation to the changes in its load and the capacity in relation to the process of transmitting the required power to each network node. The concept of “network stiffness” has been adopted by the literature on the subject of research and by its use in practical applications mainly due to the fact that thanks to this concept, significant simplifications related to the analysis of the conditions for cooperation of technical devices with the system, including energy generation sources (e.g. generators) in the on-board electrical network of the aircraft and receiving devices, which facilitated the selection of principles of operation of their protection, control and regulation systems.
Therefore, it can be stated that under real conditions, a rigid network does not exist, because each electrical network is flexible (pliable, susceptible) and each excitation is affected by a change in operating parameters. It only depends on the size and place where the input is applied, whether the change in parameters will be noticeable at all, or whether it will be significant or even disrupting the operation of the system. Its flexibility (susceptibility) depends both on the structure of the system (network structure, power of sources, method of their regulation, etc.), as well as the parameters of the operation of the system (voltage level, power of sources, etc.). Therefore, the operating parameters of the on-board electricity distribution system are a function of local power balances and the power transmissions that depend on them. The problem of local power balancing in the system, including load power characteristics, generators characteristics, mainly in terms of reactive power, is discussed in detail in18.
This article discusses the reactive power balance and states that it functions as a factor influencing the state of voltage stability in the system. The same applies to the active power balance, although it is usually assumed that it is the reactive power flow that affects the nodal voltage vector modules, and the active power flow affects the distribution angles of these vectors. As a result, the concept of angular stability emerged, and research in this area was implemented, and for the in-depth and comprehensive protection of systems, current measurement of voltage phasors was proposed19,20,21,22.
Detailed considerations in the aspect of maintaining the conditions of stable operation of the power system confirm that in order to assess the state (reserve) of stability, it is necessary to take into account the nodal voltage vectors (modules and angles) resulting from the flow of active and reactive power23,24,25,26. Moreover, during the study of high power transmissions, it can be clearly observed that the linking of voltage levels with the transmission of reactive power only, and the relationship of voltage vector distribution angles to the transmission of only active power is not correct. Sometimes it happens that the a priori simplifications do not simplify, but complicate or even make it impossible to obtain the right solution.
Analysis of the stability of the EPDS system with constant power load
In the first step of the analysis, it was assumed that only the constant power load is applied to the DC bus. In the next step, it is possible to test the stability of the system by performing an analysis based on the transfer function and loop gain of the program, i.e. by rectifier amplification and phase margin test. The figure below (Fig. 3) presents the obtained functions of transferring the control voltage of the boost rectifier to the output by carrying out the linearization process of the EPDS model developed in the Matlab/Simulink environment.

Transfer functions of the boost rectifier control to the output with constant current load.
The function transfer was obtained when using a direct current load with different power levels ranging from 1 kW to 300 kW, where this type of load has an infinite input impedance for small signals, which consequently does not affect the source transfer functions, but only determines its state balance; therefore it is a good starting point when analysing the dynamic properties of the boost rectifier. Based on the figure above, it can be seen that both the quantity and the phase of the transfer function change significantly with the power level of the load. Therefore, the linear output compensator with a voltage feedback of the boost rectifier must be optimized for the whole possible power range (16).
The compensator is designed to ensure stable operation of the system over a wide range of load conditions, albeit with a somewhat slow transient response. As can be seen from the boost rectifier loop of the gain transfer function (Fig. 4), the compensator provides sufficient stability phase margins with loads at all power levels. However, the control loop bandwidth becomes smaller as the load increases, resulting in a slower transient response.

Transfer functions of the boost rectifier loop gain under constant load.

Gain of the rectifier output impedance transfer function with constant current load.
It should be noted that compensators based on the amplification planning process would probably be able to eliminate the reduction in throughput and thus improve the dynamic properties of the boost rectifier. The figure above (Fig. 5) shows the output impedance of the closed-loop boost rectifier with a constant current load value. This is the key transfer function that was used in a further step to analyse the stability based on the impedance factor criterion. It can be seen that the output impedance initially decreases as the load increases to about 200 kW and then increases again.
In addition, the bus load can have character of a DC load if it has a regulator designed to provide a DC current to the load independent of voltage disturbance on the bus. As mentioned above, the DC load has an infinite input impedance for small signals (which can also be considered in a positive or negative way). However, more likely in practical applications, the load would be resistively or permanently connected to the bus. A resistive load has an input impedance equal to its resistance (resistance of a small signal if the load is nonlinear) with a neutral phase in the frequency range. A constant power load appears on the DC bus with a large resistance signal and resistance to a small signal (1–18).
This type of load has a low signal input impedance equal \(\:\left|{\text{R}}_{\text{s}\text{s}}\right|\) to the phase of 180 degrees of the frequency range. Another possible type of load not covered in these studies is a load with a complex input impedance, and an RLC network or resistive load with an example of this type is the input filter.
The following figures (Figs. 6, 7 and 8) show how to modify the output control functions, loop gain and transfer of the output impedance of the booster rectifier in the case of resistive and constant power loads compared to a constant current load of the same power level, where the transfer functions are determined for two power levels. In the case of resistive loads, the quantities of the first two transfer functions are smaller and the phases larger than for the corresponding current loads. It can be seen that the phase margin for a resistive load is greater than for a current load. On the other hand, with a resistive load, the system is more stable, with greater damping and slower response in transients.

The functions of the boost rectifier control transfer at the output with different types of load.

Transfer functions of the boost rectifier loop gain under different load types.

The functions of the boost rectifier output impedance transfer under different load types.
The above situation means that the phase margin for a resistive load is greater than for a current load. Conversely, in the case of a resistive load, the system is more stable with higher damping and slower transient response, i.e. a constant power load modifies the transfer functions in the opposite way. It should be noted that for a power load of 5 kW, the phase margin is reduced compared to the present load at roughly the same value and has been increased in the case of a resistive load.
Consequently, at constant system load power, damping is reduced, the system becomes more oscillating and prone to instability. However, it is sufficiently stable under a constant load of 5 kW. The second set of transfer functions obtained for loads of 255 kW shows that with a constant power load of this value, the system even has a negative phase margin which indicates instability. Such an example shows that a constant power load can cause an instability in the EPDS system.
The output impedance transfer functions shown in Fig. 8 show that with a constant load of 255 kW, the phase changes its normal shape and passes 180 degrees, which is an additional indication of instability, and the shape of the quantity curve is also significantly modified. In contrast, there is no significant change in output impedance due to the difference in load types at low power levels. Using the developed approach, it is convenient to analyse the stability of two coupled systems by RD Middlebrook27, who proposed the use of the impedance coefficient as a stability test (19).
where \(\:{\text{Z}}_{0}\) - source output impedance, \(\:{\text{Z}}_{\text{i}}\) - load input impedance.

Small-signal impedances of the boost rectifier and a constant load of 100 kW.

Small-signal impedances of the boost rectifier and the constant load of 253 kW.

Small-signal impedances of the boost rectifier and the constant load of 270 kW.
The above figures (Figs. 9, 10 and 11) show the output impedance of the boost rectifier and the bus load. As evidenced by the impedance ratio criterion, instability occurs when the input impedance load magnitude is lower than the output impedance amount of the boost rectifier at the output impedance zero frequency. It can be seen that the EPDS system with constant power of 100 kW (the load is stable (Fig. 9)); is close to extreme stability at a load of 253 kW (Fig. 10) and unstable at a load of 270 kW (Fig. 11).
The EPDS system at a load of 253 kW, after initial transients with a voltage drop, caused saturation in the boost mode, and the rectifier driver shows a very oscillating, poorly damped response, typical of a system near extreme stability. An EPDS system with a constant load of 270 kW produces a response with infinite non-linear oscillations. This is due to the stability in the sense of a large signal with a small instability signal. The frequency of these oscillations is approximately 2,200 Hz or 13,800 rad/s, which is equal to the phase division frequency in Fig. 11.
The value of these oscillations exceeds 300 V, which exceeds the limits specified by the MIL-STD-704E standard. According to the specifications, the DC bus load in the EPDS system of the future aircraft will be a mixed type with a constant load up to 75% of the total power28. Therefore, it is important to understand how a constant power load will affect the dynamic properties of the system in combination with a resistive load. Operating point, when both ohmic loads and constant power loads of the boost rectifier are applied to the bus is determined by the sum of these loads. It should be noted that the potential for the occurrence of unstable interactions in the system occurs when \(\:{\text{R}}_{\text{e}\text{q}}\) has a negative value and is small, while sufficiently large (close to zero) in magnitude, as can be observed in the above figures (Figs. 9, 10 and 11), as a result, the equivalent of the small-signal resistance of the bus can be represented by the following formula (20):
where: \(\:{\text{R}}_{\text{p}}\)= \(\:\frac{{\text{V}}_{\text{b}\text{u}\text{s}}^{2}}{{\text{P}}_{\text{r}\text{e}\text{s}}}\) - positive small-signal resistance of a resistive load \(\:{\text{P}}_{\text{r}\text{e}\text{s}}\), \(\:{\text{R}}_{\text{n}}=\frac{{\text{V}}_{\text{b}\text{u}\text{s}}^{2}}{{\text{P}}_{\text{c}\text{o}\text{n}\text{s}\text{t}}}\) - negative small-signal resistance of constant power load \(\:{\text{P}}_{\text{c}\text{o}\text{n}\text{s}\text{t}.}\).

Transient AC bus voltage response for different values of constant power load.

Transient DC bus voltage response for different values of constant power load.
For an arbitrary load with small-signal resistance \(\:{\text{R}}_{\text{s}\text{s}}\), it is possible to determine the apparent power \(\:{\text{P}}_{\text{a}}\) with which the load is observed on the bus with respect to small signals, as illustrated in the figures above (Figs. 12 and 13), determined from the following Eq. (21):
It should be noted that the value of the apparent power \(\:{\text{P}}_{\text{a}}\) is equal to the value of the actual power of the load, only in the case of a linear load, and not necessarily in the case of a non-linear load. In addition, it is possible to show that when considering the equivalent small-signal bus resistance with a mixed load expressed by (20) can be obtained by using the equivalent apparent power of all loads based on the following Eqs. (22) and (23):
where: \(\:\text{n}\) - number of loads.
Hence, the actual total bus load can be calculated from (24) as the algebraic sum of all load powers, including DC loads:
Discussion
The article presents the modeling and analysis process of a potential on-board electricity management system for DC distribution in an electrified aircraft with the use of a package of research tools for modeling and simulations developed. The chosen research platform was the Matlab/Simulink programming environment, within which the idea of multi-level modeling (detailed, behavioral and reduced order model) was selected and used in the form of a modeling approach based on created models of different levels of complexity for each component of the EPDS. In this regard, among other things, both the issue of stability and the influence of overload values in the on-board electrical network of MEA/AEA aircraft were considered, as well as the focus on the configuration and development of an algorithm for analysing the stability of the proposed system.
The developed models of specific subsystems at different levels were merged to model various operational scenarios. In contrast, the linearization techniques and methods provided by the Matlab/Simulink package were used to obtain linearized models of nonlinear systems necessary for stability analysis and control design. The subsystems modeled in the research process concern the main power sources, i.e. a three-phase synchronous generator, a three-phase boost rectifier, a switched integrated unit of the starter/generator type, a DC/DC converter, electromechanical (EMA) and electro-hydrostatic actuators (EHA), and various types of DC bus loads. In the next step, the applied modeling tools were used to research and testing problems related to the stability of the EPDS system, including the stability and influence of overload values in the on-board electrical network of the electrified aircraft, in relation to the configuration and stability analysis algorithm of the considered system. In order to estimate the changes in the values of key system parameters, i.e. voltage and reactive power in the electrical network of an electrified aircraft with resistive-capacitive overloads, it is necessary to search for a relationship between these values (2):
where \(\:{\text{Q}}_{\text{g}}\)- active power, \(\:{\text{Q}}_{\text{o}}\)- reactive power.
If the generated and consumed reactive powers do not balance, then a stable or unstable transient process occurs. It should be noted that in the case of an unstable process, which is generally aperiodic - it is not possible to achieve a new steady state and there is a so-called voltage avalanche29,30, which can be written as follows (26):
On the other hand, when the overload is small, the operation of the generators voltage regulators maintains its value close to the rated value, however, causing the permissible current value of the generators to be exceeded. This type of overrun is not eliminated in the initial period by the stator current limiters operating with a deliberately introduced time delay, as a result a new state of the so-called quasi-fixed is achieved. However, after some time the limiters start to limit the current overload and cause a change in the external characteristics of the generator, shown in the figure below (Fig. 14)31.

Interpretation of small reactive power overloads, where: 1- quasi-steady state for \(\:{\text{X}}_{\text{k}}=0\); 2- quasi-steady state for \(\:{\text{X}}_{\text{k}}>0\); \(\:\text{O}\)- characteristics of the loads
The figure above shows two points of operation, i.e. quasi-steady operation until the current is limited by the limiters. It has also been shown that, due to the operation of the limiters, it is not possible to meet the demand for reactive power and a voltage avalanche is created. In the case of high overloads, the situation shown in the next figure (Fig. 15) takes place.

Interpretation of the large reactive power overloads, where: 1- quasi-steady state for \(\:{\text{X}}_{\text{k}}=0\); 2- quasi-steady state for \(\:{\text{X}}_{\text{k}}>0\); \(\:\text{O}\)- load characteristics.
Based on the comparison of the generation and load characteristics, it can be concluded that it is not possible to obtain the reactive power balance in the subsystem. The consequence of the lack of this possibility is an avalanche of voltage impossible to control without shutting down some loads (emergency or standby operation). The shutdown process will shift the “\(\:\text{O}\)” characteristic to the left, making it possible to obtain the reactive power balance.
The concept of voltage stability is defined for the receiving systems of the electro-energy system of the on-board electrical network of the aircraft compatible with the MEA/AEA concept. The static analysis of voltage stability was carried out on the basis of the voltage-current equations defined for the nodes occurring in the electrical network of the electrified aircraft (Fig. 16)32.

Diagram of the flow of currents in a node \(\:\text{k}\) of the power supply system of an electrified aircraft, where: \(\:{\text{U}}_{\text{k}\text{f}}\)- node voltage \(\:\text{k}\); \(\:{\text{U}}_{\text{l}\text{f}}\)- voltage in node l; \(\:{\text{J}}_{\text{k}\text{l}}\)- current flowing between nodes \(\:\text{k}\) and \(\:\text{l}\); \(\:{\text{J}}_{\text{k}}\)- receiving current in node \(\:\text{k}\); \(\:{\text{J}}_{\text{k}\text{g}}\)- generator current in node \(\:\text{k}\); \(\:{\text{Z}}_{\text{k}\text{l}}\), \(\:{\text{Y}}_{\text{k}\text{l}}\)- impedance and admittance of the element connecting nodes \(\:\text{k}\) and \(\:\text{l}\); \(\:{\text{U}}_{\text{k}\text{o}}\), \(\:{\text{U}}_{\text{l}\text{o}}\)- admittance of transverse branches in nodes \(\:\text{k}\) and \(\:\text{l}\); \(\:{\text{Y}}_{\text{k}}\)- reception replacement admittance at the node \(\:\text{l}\).
The active and reactive power consumed in the node \(\:\text{k}\) is described by the relationship (27):
This relationship determines the active and reactive powers for all load nodes of the analysed power system, both for the steady state and the transient states. By analysing power changes in the vicinity of the operating point, determined with the given parameters \(\:\left({{\uptheta\:}}^{\text{o}},{\text{U}}^{\text{o}}\right)\) for all nodes, the changes in active and reactive power were determined (28):
By linearizing the system and going to the analysis of small deviations of the dependence on power changes \(\:{\Delta\:}\text{P}\) and \(\:{\Delta\:}\text{Q}\) as a function of voltage changes \(\:\text{U}\) and the vector angle of deflection \(\:{\uptheta\:}\), the following relationship was obtained (29):
that is (30):
Assuming that there are only changes in reactive power in the system \({\text{\varvec{\Delta}P}}=0\), the above relationship will take the form (31):
By transforming and eliminating the angle \({\text{\varvec{\uptheta}}}\), the relationship between changes in reactive power \({\text{\varvec{\Delta}Q}}\) and changes in voltage \({\text{\varvec{\Delta}U}}\) was obtained (32):
The matrix elements \({\text{J}}_{{\text{R}}}^{{ - 1{\text{~}}}}\) lying on the main diagonal define the voltage sensitivity of the receiving nodes of the electro-energy system \(\frac{{\Delta {\mathbf{U}}}}{{\Delta {\text{Q}}}}={\text{J}}_{{\text{R}}}^{{ - 1{\text{~}}}}\). For any node \({\text{k}}\), the voltage sensitivity and its relationship with the voltage stability in the node can be determined (33):
The proposed management system architecture (generation, processing, distribution) of on-board electricity in terms of its distribution to end receivers being a load on the main sources of the AAES advanced power system (EPS, PES) used for the stability analysis is presented in the figure below (Fig. 17). As can be seen, a solution was adopted in which the key role is played by a synchronous generator that supplies power to the system by means of a three-phase AC current and a rectifier amplifier to the DC bus loads.

Block diagram of the EPDS system in terms of stability analysis.
Figure 17 shows the detailed structure of the separate blocks of the Electric Power Distribution System (EPDS), which is the main component of the energy solutions used in modern electric aircraft in line with the More/All Electric Aircraft (MEA/AEA) concept. The structure was designed both in terms of ensuring the stability of the supplied electricity and in the field of performing an in-depth analysis of the stability of the system using various simulation techniques.
In summary, the block structure presented in Fig. 17 was designed with the aspect of better understanding the influence of the different components of the EPDS on its stability. For example, the use of a synchronous generator as the main source of electricity ensures a stable power supply, while the rectifier and DC bus system enables the efficient management and distribution of energy to the final electricity consumers. Moreover, the stability studies for this system include selected simulation tests performed in the Matlab/Simulink programming environment, which allows accurate modelling of the interactions between the different system components and evaluation of their impact on the overall stability of the EPDS.
The considered loads in the aspect of the stability of the EPDS system were considered based on the EMA (Electromechanical Actuator) actuators and a typical resistive load characterized by a constant power, while both single and mixed loads were analysed. The essence of the stability analysis process used in the research were the techniques/methods of analysis in the frequency domain, including the concepts known from the theory of linear control. The basis of the research was the process of linearization of the nonlinear mathematical model of the EPDS system under the conditions of equilibrium of specific points of interest for the purpose of analysing the stability of small signals.
Thus, it follows that obtaining positive results would prove the stability of the considered system in the context of considering this process for relatively small disturbances around the equilibrium point. On the other hand, in the opposite situation, i.e. in the case of system instability, this state, even with a small signal, may cause local instability along with oscillations around the point of equilibrium, or complex instability, in the case of significant deviations from this point. For functional reasons, as well as for better ergonomics of the EPDS system stability testing process, based on simulations of key components and developed mathematical models, both the simulation process in the Matlab/Simulink programming environment and the linearization process of the analysed system were carried out separately.
This approach, which can be observed in the figures above (Figs. 14, 15, 16 and 17), was dictated primarily by the fact that the linearization process forces many additional elements from the block diagram of the system (e.g. input, output, ports, switches, etc.), where the values of the state variables of the analysed system in the initial stage, they take different values for both the simulation and linearization process. Thus, the analysis of the EPDS system based on separate block diagrams developed in Matlab/Simulink program will be much more accurate and transparent, especially in the case of complex systems with a large number of components, subsystems, etc. The process of linearization of the non-linear EPDS system was performed based on the “linmod” command of the Matlab/Simulink programming environment. At a further stage of the analysis, transmission functions were separated from the linearized model in the aspect of on-board electricity management for the needs of the stability analysis of the considered system.
On the basis of the conducted research, an analysis of the dynamic properties of the boost rectifier was carried out, which in a further stage was used to analyse the interaction between the boost rectifier and various types of loads (Figs. 3, 4, 5, 6, 7 and 8). On this basis, it was found that the existence of a constant power load on the DC bus may be the cause of the instability phenomenon in the considered system in the EPDS system. In addition, it should be noted that the instability created is a consequence of the voltage and current oscillations of the DC bus, which exceed the permissible limits established by the MILSTD-704E standard (Figs. 9 and 10). For this purpose, a DC bus stability diagram has been proposed, which is a convenient tool for predicting the stability of the EPDS system when considering various types of loads without carrying out a real stability test, based on the usual tools for analysing the stability of the system. It has been shown, inter alia, that the potential for instability in the EPDS system takes place under both direct and regenerative power flow conditions.
Methods
This paper presents both the modelling process and the analysis of a potential on-board DC power management system in an electrified aircraft using a developed research toolbox for modelling and simulation. The chosen research platform was the Matlab/Simulink programming environment, based on which the idea of multi-level modelling was proposed. In this respect, the three types of models built were used, i.e. detailed model, behavioural model and reduced model. The selected models were integrated into the full EPDS power system model according to the defined rules implemented in the interconnections. In this study, the dynamic characteristics of the boost rectifier and its interaction with different types of loads were analysed. The parameters used in the proposed EPDS models are included in the following table (Table 1):
In this respect, it was found that the presence of DC loads on the DC bus can cause instability in EPDS power systems. This instability is mainly due to the occurrence of voltage and current fluctuations on the DC bus exceeding the permissible limits specified in MILSTD-704E. Models of the individual subsystems were implemented in the Matlab/Simulink development environment, integrated into the overall EPDS system model. The linearisation techniques and methods provided by the Matlab/Simulink environment were used to obtain the linearised models of non-linear systems required for stability analysis and control design. The subsystems modelled in the research process concern the main power sources, such as: three-phase synchronous generator, the three-phase boost rectifier, DC/DC converter, and different types of DC bus loads.
The authors of article, entering the research, of the article expected greater differences due to the different way of modeling the aircraft electrical network in accordance with the MEA trend. First of all, they expected a clear difference in the critical times of short-circuit duration and the corresponding values of stability reserves. Meanwhile, the differences obtained are relatively small, practically not affecting the assessment of system stability according to this criterion. Perhaps this is due to the not very accurately chosen location of the disturbance, for which, also in the case of extreme events, large values of stability stock were obtained. To avoid the transmission of reactive power in the electrical network of the aircraft and to ensure its regulation, capacitor banks or static compensators are installed near the loads. However, the most effective method of ensuring the safety of power transmission in the aircraft electrical network is to control the reactive power compensation in this way, through the EPDS.
However, the current technical condition of the transmission network and the technical condition of the electrical network in conventional aircraft does not create an effective enforcement of the EPDS system of the proper control of distribution networks of eclectic energy. Expectations for improvement are enabled by modern technologies, based on extensive measurement systems and the concept of electrified aircraft (MEA/AEA). In domestic conditions there is an increasing interest in implementing auxiliary systems responsible for the generation of eclectic power at the nodes of the network transmitting AC and DC current and voltage. However, the most important problem is the lack of appropriate algorithms for controlling the operation of the power system, which use synchronous phasor measurements. For a full evaluation of the system, it is also necessary to assess the loading of network elements in non-disruptive states, static and dynamic voltage changes and voltage stability.
In the presented article, the system was studied considering: planning events, for which it is assumed that EPDS behavior standards must be met, and extreme events, for which EPDS behavior standards do not have to be met. However, extreme events can lead to area failures or system failures, so it is worth considering these events in the study as well. The network analysis methods described in the article are performed for multivariate deterministic models that create scenarios of aircraft electrical network development for various variants of load growth forecasts and power source development plans. For the purpose of solving the research problem, the dynamic analyses should take into account computer simulation of the transient caused by the event, and the transient angular stability test program should be used for the simulation. In the dynamic analyses modeling a given event, the mathematical models of power generation units and automatic control systems should be mapped, and the actual operation of the protections relevant to the event should be taken into account. The authors of the article would like to emphasize that the problems of providing electricity in an aircraft, especially in an electrified aircraft, include not only economic aspects but, first of all, technical aspects related to the safety and reliability of the operation of the electrical power system, with this article being part of the latter aspect.
The results confirm that implementing MEA/AEA systems requires investment in new technology, which increases initial costs. However, long-term benefits such as reduced fuel consumption and improved energy efficiency can reduce operating costs. In addition, the use of electronic systems helps to reduce the weight of the aircraft, as it reduces fuel consumption and lowers operating costs. One of the most important economic aspects is the stability of the power system, which affects operating costs. Voltage and current asymmetry in MEA/AEA systems can cause failures, costly servicing and the need for expensive repairs. Therefore, it is important that these systems are designed to reduce the risk of failure, which on the one hand can increase design costs, but on the other hand reduce service and maintenance costs. The results of the research can reduce the costs associated with the design and implementation of DC/DC conversion systems, which are a key component of on-board power management systems. The use of advanced mathematical models can accurately predict the stability of these systems, which can reduce the need for costly laboratory testing. In the long term, this can lead to significant financial savings, as it eliminates the need to perform costly tests under real operating conditions.
The data obtained from the tests allowed energy consumption to be optimised in an economic context. The correct management of electrical energy on board aircraft, including the optimisation of energy consumption and distribution, can lead to a reduction in operating costs. The use of modern technologies, such as high-efficiency power converters, allows more efficient use of available energy, resulting in reduced costs related to fuel consumption and aircraft operation.
Data availability
Data is provided within the manuscript or supplementary information files.
Abbreviations
- \(\:{P}_{out}\) :
-
Average output power in AC converter
- \(\:{U}_{rms}\) :
-
Effective value of voltage in the generator circuit
- \(\:{i}_{AC}\) :
-
AC current in the generator circuit
- \(\:\omega\:t\) :
-
Phase angle of current in the generator circuit
- \(\:{R}_{s}\) :
-
Resistance in the generator circuit
- \(\:{i}_{o}\) :
-
Initial current
- \(\:{L}_{s}\) :
-
Coil inductance
- \(\:{u}_{o}\) :
-
Initial voltage
- \(\:{i}_{switch}\) :
-
Switch current
- \(\:{L}_{in}\) :
-
Input inductance
- \(\:{C}_{s}\) :
-
Capacitance of the capacitor
- \(\:{u}_{Cs/c}\) :
-
Voltage on capacitor in switch on and switch off states
- \(\:{u}_{switch}\) :
-
Voltage on the switch in the ‘off’ state
- \(\:{i}_{Lin}\) :
-
Maximum current value at the converter input in the “on” state
- \(\:{i}_{Ls}\) :
-
Maximum current on the coil in the ‘on’ state
- \(\:{i}_{Lc}\) :
-
Maximum current on the coil in the ‘off’ state
- \(\:{i}_{Cs}\) :
-
Maximum capacitor current in the ‘on’ state
- \(\:{i}_{Cp}\) :
-
Capacitor current in positive switch state
- \(\:{U}_{Ds}\) :
-
Maximum current on the coil in the ‘off’ state
- \(\:{P}_{k}\) :
-
Active power consumed in the node\(\:{k}_{k}\)
- \(\:{Q}_{k}\) :
-
Reactive power consumed in the node\(\:{k}_{k}\)
- \(\:{J}_{k}\) :
-
Consumption current at the node\(\:{k}_{k}\)
- \(\:{G}_{kl}\) :
-
Conductance of the element connecting the nodes \(\:{k}_{k}\) and \(\:{l}_{l}\)
- \(\:{B}_{kl}\) :
-
Susceptance of the element connecting the nodes \(\:{k}_{k}\) and\(\:{l}_{l}\)
- \(\:{Y}_{k}\) :
-
Receiving admittance in the \(\:{k}_{k}\) node
- \(\:dU/dt\) :
-
Voltage change over time
- \(\:{Q}_{g}\) :
-
Active power generated
- \(\:{Q}_{o}\) :
-
Reactive power consumed
References
Emadi, A. & Ehsani, M. Electrical System Architectures for Future Aircraft, SAE Technical Paper 1999-01-2645. https://doi.org/10.4271/1999-01-2645 (1999).
Emadi, A., Fahimi, B. & Ehsani, M. On the Concept of negative impedance instability in the More Electric Aircraft Power Systems with constant power loads, SAE Technical Paper 1999-01-2545. https://doi.org/10.4271/1999-01-2545 (1999).
Han, L., Wang, J. & Howe, D. Small-signal Stability Studies of a 270V DC More-Electric Aircraft Power System. In 2006 3rd IET International Conference on Power Electronics, Machines and Drives - PEMD 2006 162–166 (2006).
Lee, J. Y., Jeong, Y. S., Han, B. M. & An Isolated, D. C. D. C. Converter using high-frequency unregulated LLC resonant converter for fuel cell applications. IEEE Trans. Ind. Electron. 58, 2926–2934 (2011).
Setlak, L., Kowalik, R. & Science, C. DC/DC processing system of inductive-capacitive character of on-board electrical network of an aircraft in accordance with the concept of an electrified aircraft. In 2019 3rd European Conference on Electrical Engineering and (EECS) 53–59. https://doi.org/10.1109/EECS49779.2019.00023 (2019).
Emadi, A. & Ehsani, M. Negative impedance stabilizing controls for PWM DC-DC converters using feedback linearization techniques, Collection of Technical Papers. 35th Intersociety Energy Conversion Engineering Conference and Exhibit (IECEC) (Cat. No.00CH37022), 1, 613–620. https://doi.org/10.1109/IECEC.2000.870842 (2000).
Sarlioglu, B. & Morris, C. T. More electric aircraft: Review, challenges, and opportunities for commercial transport aircraft. IEEE Trans. Transp. Electrification. 1, 54–64 (2015).
Setlak, L. & Kowalik, R. Mathematical model and simulation of selected components of the EPS of the aircraft, providing the operation of on-board electrical equipment and systems in accordance with MEA/AEA concept. In 2017 Progress in Applied Electrical Engineering (PAEE) 1–6. https://doi.org/10.1109/PAEE.2017.8009007 (2017).
Wheeler, P. & Bozhko, S. The more electric aircraft: Technology and challenges. IEEE Electrification Mag. 2, 6–12 (2014).
Setlak, L. & Kowalik, R. The effectiveness of on-board aircraft power sources in line with the trend of a more electric aircraft, 2018 19th International Scientific Conference on Electric Power Engineering (EPE) 1–6. https://doi.org/10.1109/EPE.2018.8396042 (2018).
Kelkar, S. S. & Lee, F. C. Stability analysis of a buck regulator employing input filter compensation. In IEEE Transactions on Aerospace and Electronic Systems, Vol. AES-20, No. 1, 67–77 (1984). https://doi.org/10.1109/TAES.1984.310494
Griffo & Wang, J. Large signal stability analysis of ‘More electric’ aircraft power systems with constant power loads. IEEE Trans. Aerosp. Electron. Syst. 48(1), 477–489. https://doi.org/10.1109/TAES.2012.6129649 (2012).
Ebrahimi, H., El-Kishky, H., Biswass, M. & Robinson, M. Impact of pulsed power loads on advanced aircraft electric power systems with hybrid APU. In 2016 IEEE International Power Modulator and High Voltage Conference (IPMHVC) 434–437 (2016). https://doi.org/10.1109/IPMHVC.2016.8012857
Areerak, K. N., Bozhko, S. V., Asher, G. M., De Lillo, L. & Thomas, D. W. P. Stability study for a hybrid AC-DC more-electric aircraft power system. IEEE Trans. Aerosp. Electron. Syst. 48(1), 329–347. https://doi.org/10.1109/TAES.2012.6129639 (2012).
Che, Y. et al. Stability analysis of aircraft power systems based on a unified large signal model. Energies. 10, 1739. https://doi.org/10.3390/en10111739 (2017).
Yan, Y. G., Qin, H. H., Gong, C. Y. & Wang, H. Z. More electric aircraft and power electronics. J. Nanjing Univ. Aeronaut. Astronaut. 46, 11–18 (2014).
Han, S. B., Choi, N. S., Rim, C. T. & Cho, G. H. Modeling and analysis of static and dynamic characteristics for Buck-type three-phase PWM rectifier by circuit DQ transformation. IEEE Trans. Power Electron. 13, 323–336 (1998).
Chen, Y. & Zhang, B. Minimization of the electromagnetic torque ripple caused by the coils inter-turn short circuit fault in dual-redundancy permanent magnet synchronous motors. Energies. 10(1798). https://doi.org/10.3390/en101117 (2017).
Thakur, S. S. et al. Stability analysis of the electrical power generation system for a more electric aircraft, 2018 IEEE Energy Conversion Congress and Exposition (ECCE) 509–516 (2018). https://doi.org/10.1109/ECCE.2018.8557655
Cao, B., Chen, X., Wu, D., Yan, M. & Fan, K. Frequency characteristics and stability analysis of ATRU based on impedance mapping method, 2021 IEEE 1st International Power Electronics and Application Symposium (PEAS) 1–6 (2021). https://doi.org/10.1109/PEAS53589.9628678
Marx, D., Magne, P., Nahid-Mobarakeh, B., Pierfederici, S. & Davat, B. Large Signal Stability Analysis Tools in DC Power Systems with constant power loads and variable power Loads—A review. IEEE Trans. Power Electron. 27(4), 1773–1787. https://doi.org/10.1109/TPEL.2011.2170202 (2012).
Liutanakul, P., Awan, A. B., Pierfederici, S., Nahid-Mobarakeh, B. & Meibody-Tabar, F. Linear stabilization of a DC Bus supplying a constant power load: a General Design Approach. IEEE Trans. Power Electron. 25(2), 475–488. https://doi.org/10.1109/TPEL.2009.2025274 (2010).
Lu, X. et al. Stability Enhancement based on virtual impedance for DC microgrids with constant power loads. IEEE Trans. Smart Grid. 6(6), 2770–2783. https://doi.org/10.1109/TSG.2015.2455017 (2015).
Ying-xi, L., Xin-hua, M., Hong-Juan, G. & Hua, J. S. Study and simulation analysis on aircraft transformer rectifier Unit (TRU) with constant power load (CPL). In 2005 International Conference on Electrical Machines and Systems, Vol. 3, 2018–2022 (2005). https://doi.org/10.1109/ICEMS.2005.202915
Lang, X. et al. Stability improvement of on-board HVDC grid and engine using an advanced power generation center for the more-electric aircraft. In IEEE Transactions on Transportation Electrification, Vol. 8, No. 1, 660–674 (2022). https://doi.org/10.1109/TTE.2021.3095256.
Ma, Z., Zhang, X., Huang, J. & Zhao, B. Stability-constraining-dichotomy-solution-based model predictive control to improve the stability of power conversion system in the MEA. IEEE Trans. Industr. Electron. 66(7), 5696–5706. https://doi.org/10.1109/TIE.2018.2875418 (2019).
Zajczyk, R. Voltage stability of the power subsystem. Acta Energetica ENERGA. No. 2, 63–74 (2010).
Kundur, P. Power System Stability and Control (McGraw-Hill, Inc., 1994).
Machowski, J., Białek, J. W. & Bumby, J. R. Power System Dynamics and Stability (Wiley, 1977).
Chua, L. O. Lin Pen-Min. Computer Analysis of Electronic Circuits. Algorithms and Computational Methods (WNT, 1981).
Middlebrook, R. D., Cuk, S. & Modeling and Analysis Methods for DC-to-DC Switching Converters. Proceedings of the IEEE International Semiconductor Power Converter Conference, Record, March pp. 90–111. Reprinted in Advances in Switched-Mode Power Conversion. Vo. 1, Teslaco (1983). (1977).
Ferreira, C. A., Jones, S. R., Heglund, W. S. & Jones, W. D. Detailed design of a 30-kW switched reluctance starter/generator system for a gas turbine engine application. IEEE Trans. Ind. Appl. 31(3), 553–561. https://doi.org/10.1109/28.382116 (1995).
Kelu, X., Ning, X., Chengmin, W., & Xudong, S. Simulation of variable speed variable frequency. Open Electr. Electron. Eng. J. 11, 87–98 (2017). https://doi.org/10.2174/1874129001711010087
Acknowledgements
This work was funded by the Polish Air Force University Funding Programme research programme listed after number LAW/2024/12.
Author information
Authors and Affiliations
Contributions
Conceptualization, R.K. and L. S.; methodology, R.K.; software, R.K.; validation, P.G. formal analysis, A.G.; investigation, R.K., L.S.; resources, P.G.; data curation, R.K.; writing—original draft preparation, L.S.; writing—review and editing, A.G.; visualization, R.K.; supervision, P.G.; project administration, A.G.; funding acquisition, P.G.
Corresponding author
Ethics declarations
Competing interests
The authors declare no competing interests.
Additional information
Publisher’s note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Electronic supplementary material
Below is the link to the electronic supplementary material.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution-NonCommercial-NoDerivatives 4.0 International License, which permits any non-commercial use, sharing, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if you modified the licensed material. You do not have permission under this licence to share adapted material derived from this article or parts of it. The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by-nc-nd/4.0/.
About this article

Cite this article
Setlak, L., Kowalik, R., Gębura, A. et al. Dynamic stability analysis of the aircraft electrical power system in the more electric aircraft concept. Sci Rep 14, 25521 (2024). https://doi.org/10.1038/s41598-024-74762-1
Received:
Accepted:
Published:
Version of record:
DOI: https://doi.org/10.1038/s41598-024-74762-1
Keywords
This article is cited by
-
Cross-entropy based AC series arc fault detection for more electric aircrafts
Scientific Reports (2025)
