
Abstract
In this work, we aim at disentangling the theoretical contribution through mathematical modeling approach to advance the understanding of rabies dynamics and control in livestock population. A fractional order model of rabies, using Atangana–Baleanu fractional operator is created. The analysis of suggested system and its application are both conducted. The capacity of proposed model to forecast the disease can help researchers and livestock health care agencies to take preventive actions.
Similar content being viewed by others

Introduction
Rabies is a viral zoonosis, a disease that is transferrable between humans and animals. It is caused by infection with rabies virus of genus Lyssavirus1. If left untreated, the disease is fetal. Humans and mammals both catch rabies through direct contact, food, bite or scratches given by an other infected animal. Commonly, the saliva of infected animals is contaminated by rabies virus and results in its transmission when they get in contact with other animals or humans2.
Some of the primary reservoirs of rabies disease include animals like foxes, bats, skunks, rodents cats, dogs and raccoons. Rabies virus is transmitted in humans generally by dogs and livestock3,4,5,6. Pets generally develop this disease when get bitten by rabid skunks. Basically, this virus gets into the nervous system, attacks it and leads to a critical neurological imbalance in the host body. Among other abnormalities, significant symptoms are hallucinations, anxiety, excess of saliva, paralysis and excitation7.
An annual report of WHO (World Health Organization) shows approximately 59,000 deaths across the globe due to rabies disease declaring it as a major health concern8. Though vaccination played a huge positive role in coping up with rabies in developed countries but most of the remote areas still suffer from harmful effects of rabies due to lack of access to vaccination.
Many factors such as existence of wildlife reservoirs, vaccine efficiency and its well timed implementation, exposure to infected ones, behavior and density of animal population makes the transmission dynamics of rabies a complex matter9.
Moreover, rabies is a major threat to livestock. There is always a danger of reintroducing rabies in domestic animals. Some species may go in extinction due to rabies. Regions that witness cases of rabies more often bear more loss. Its harmful effects can extend to their economy, tourism, agriculture, animal husbandry and much more. This threat to livestock and domestic animals puts more burden on veterinary doctors and welfare organization to cope up with rabies and overcome the loss8.
Mathematics has always been very efficient in problem solving and even for diseases, it finds a way to analyze them using mathematical modelling. By developing a mathematical model for different diseases and finding its solution, researchers provide a gateway to the public authorities to create beneficial and useful strategies to deal with diseases. Likewise, many mathematical models have been developed to get more clarity of rabies. An SEIR model was developed to study the dynamics of rabies in dogs by Tulu and his results showed that disease may end if the migration of dogs is restricted7. Also, same investigation was done by Renald et al. using an SEIV model and they suggested that vaccination can be beneficial to reduce the transmission of rabies10. Moreover, Liu et al. studied the two patch SEIRS model and found that vaccination rate should be improved and birth rate of dogs should be reduced to get rid of dog rabies in China11. Furthermore, similar studies done by González-Roldán et al.12, Kanda et al.13 and Lushasi et al.14 revealed that the improvisation of dog rabies vaccination program annually can help to control dog-to-dog and dog-to-human transmission.
Many mathematical models based on the fractional derivative have also been explored by researchers to study rabies transmission. Kumar et al. used Caputo fractional derivative to understand the dynamics of red fox rabies in Italy15. After this, Zarin et al. also incorporated Caputo fractional derivative in their research to explore the epidemic properties of rabies by considering convex incidence function16. Caputo Fabrizio derivative has been used by Aydogan et al. to look into the details of transmission pattern of the disease17. Recently, Garg and Chauhan used fixed-point approach to discuss the stability of solutions of fractional order rabies model18.
A new fractional differential operator having Mittag–Leffler function with a variety of applications was proposed by Atangana and Baleanu (AB)19. A considerable number of researchers took advantage of this differential operator to analyze the transmission mechanism of different infectious diseases. Bonyah et al. used this operator and explained the dynamics of co-infection of hepatitis and cancer. A study on tumors was held by Kumar et al. and Ghanbari et al. using this differential operator20,21. In order to get improved comprehension of COVID-19 disease many authors benefited from this remarkable differential operator22,23.
Both qualitative and quantitative research on many diseases like dengue fever, diabetes, tuberculosis and smoking have been made utilising Atangana–Baleuno derivative.
Considering dengue fever, Jajarmi et al.24 presented a fractional model in which a sophisticated method has been provided to prove the stability. Baleanu et al. designed optimal control strategy to analyze the efficiency of chemotherapy on Tumor model25. In order to better understanding of diabetes and tuberculosis co-existence, Jajarmi et al.26 provided a very efficient numerical method. Ghanbari et al. contributed in image processing through the application of Atangana–Baleanu fractional operator27. The impact of voluntary vaccination in COVID-19 has been studied mathematically by Ahmad et al.28. Sensitive parameters involved in delayed pneumonia disease model has been studied by Naveed et al.29. Atangana–Baleanu derivative in Caputo sense has been utilized by Din et al. to study Hepatitis B through a mathematical model30. The treatment of polio disease has also been studied by Naveed et al. through delayed mathematical model31. Zafar et al. contributed in the study of public health awareness impact on COVID-19 through fractional modeling32. Fractional calculus has been used by Baleanu et al. to study the transmission pattern of Nipah virus33. Investigation of Human liver has been carried out by Bhatter et al.34 through the application of fractional derivative. Recently, Faiz et al. used Neural Network technique to study the fractional order dengue disease model35. Using the idea of piece wise fractional order derivative in Caputo sense Shah et al. studied Nipah virus disease36. Xue et al. performed stability analysis by considering linear delta operator system37.
This study is based on the analysis of modified mathematical model discussed by Ndendya et al.38. The incidence functio n has been modified as the harmonic mean incidence as suggested by Shah et al.39. We organize our work as follows:
Some basic definitions are recalled in “Some important definitions” Section. “Characteristics of Atangana–Baleanu derivative” Section is devoted for the derivation of equivalent fractional integral equation to Antagana–Baleanu fractional differential equation in Reimaan sense by using the Laplace transform method. Mathematical model exploring the animal rabies disease is developed in “Mathematical model” Section. Existence of solutions and their uniqueness is proved in “Existence of solutions for the dissemination of the rabies diseasemodel” Section. In “Numerical scheme” Section, numerical scheme has been developed and graphical representation, for the illustration of analytical results, is given in “Numerical simulation” Section.
Some important definitions
First of all, we see the result of a function applying Caputo Fractional operator40,41:
Definition 2.1
The Caputo fractional order derivative for function \(\mathfrak {f}\in C^n\) of order \(\alpha\) is defined as:
This derivative is well defined for absolutely continuous functions and \(\alpha \in (n,n-1),\) where \(n\in N.\) It should be noted that the value of the Caputo fractional derivative of the function \(\mathfrak {f}\) at any point t has all the values of \(\mathfrak {f}^n(\chi )\) for \(0\ge \chi \le t.\) Clearly \(^{C}D_{t}^{\alpha }\mathfrak {f}(t)\) approaches \(\mathfrak {f}\prime (t)\) when \(\alpha \rightarrow 1.\)
Definition 2.2
The fractional integral of order \(\alpha >0\) for a function \(\mathfrak {f}:R^+\rightarrow R\) is defined as
Non-Local kernel without singularity help us to define fractional derivative with some characteristics19,42.
Definition 2.3
Suppose \(\mathfrak {f}\in H^{1}(m,n),n>m\) and \(0\le \alpha \le 1.\) The Atangana–Baleanu derivative, in the sense of Caputo, is defined as
where \(\mathfrak {N}\left( \alpha \right)\) is the normalization function whose initial and final values are unity i.e. \(\mathfrak {N}(0)=\mathfrak {N}(1)=1\) [16].
Definition 2.4
Suppose \(\mathfrak {f}(t)\) is a non differentiable function and \(\mathfrak {f}\in H^{1}(m,n),n>m,\) and \(\alpha \in \left[ 0,1\right] .\) The Atangana–Baleanu fractional derivative, in the sense of Riemann–Liouville, is defined as
Definition 2.5
The above fractional derivative has integral of order \(\alpha\), in the form of fraction, as
The initial function is obtained for \(\alpha =0\) and for \(\alpha =1,\) we get the ordinary integral.
Characteristics of Atangana–Baleanu derivative
Real world problems may be modeled by using the definitions given above. We establish the relationships among both definitions and Laplace transform, following are the relations for \(n=1\) :
and
Theorem 3.1
Suppose a continuous function \(\mathfrak {f}\) over a closed interval \(\left[ m,n\right] .\) Then, we will get the following inequality on \(\left[ m,n\right]\):
The values of \(\left\| \mathfrak {f}(x)\right\|\) is taken as \(\max _{m\le x\le n}\left| \mathfrak {f}(x)\right| .\)
Theorem 3.2
Atangana–Baleanu derivative in Caputo and Riemann–Liouville sense satisfy following Lipschitz property:
and
Theorem 3.3
A time fractional ODE is given below,
by making use of inverse Laplace transform and convolution theorem13, the equation given has one and only one solution, this solution is given below:
Interested readers may find the proofs of theorems in detail in19.
Mathematical model
Animal rabies disease (ARB) is studied through the development of fractional model with the assumption of inclusion of infected immigrants. The whole rabies population is assumed to be composed of five mutually exclusive compartments. These compartments are labeled as Susceptible Rabies, Vaccinated, Exposed, Infectious and Recovered (Rabies). These classes are represented as \(\mathcal {R}_s(t),\mathcal {R}_v(t),\mathcal {R}_e(t),\mathcal {R}_i(t),\) and \(\mathcal {R}_s(t),\) respectively. The growth of rabies population is assumed via two routes: either by birth or infected immigrants, these are denoted by \(\Theta\) and \(\Omega ,\) respectively. The population in each class decays through natural death which is represented by the rate \(\omega .\) However, infected rabies have additional removal rate represented by \(\psi .\) It is assumed that vaccine is not fully effective and the rate of waning immunity is represented by \(\phi .\) The incidence function for the transmission mechanism of rabies disease is considered as harmonic mean of \(\mathcal {R}_s(t)\) and \(\mathcal {R}_i(t)\) or \(\mathcal {R}_s(t)\) and \(\mathcal {R}_v(t)\) and are represented as \(\frac{2\upsilon \mathcal {R}_s(t)\mathcal {R}_i(t)}{\mathcal {R}_s(t)+\mathcal {R}_i(t)}\) and \(\frac{2\upsilon (1-\epsilon )\mathcal {R}_v(t)\mathcal {R}_i(t)}{\mathcal {R}_v(t)+\mathcal {R}_i(t)},\) with transmission rate \(\upsilon ,\) respectively. The modification parameter which reduces the transmission of rabies among vaccinated individuals is represented as \(\epsilon .\) The transition rates among susceptible to vaccinated, exposed to infectious and infected to recovered are represented as \(\tau ,\sigma\) and \(\rho ,\) respectively. We assume that recovered individuals don’t have permanent immunity and they join the susceptible class after \(\frac{1}{\xi }\) time.
With these assumptions, now we are able to define the fractional model which is as follows:
Existence of solutions for the dissemination of the rabies disease model
In this paper, we have considered a non linear model of the rabies disease. We have no way to establish the analytical solution of this system of differential equations. But, one can give assurance, under some conditions, about the existence of exact solution. The interested readers may go through the work of Gu et al. for getting the approximate solutions of fractional differential equations43,44,45. We will proceed here as follows to show the existence of solutions.
Let \(\mathcal {L}\left( J\right)\) be the Banach space containing continuous real valued functions from \(R\rightarrow R\) defined on interval J and \(\mathcal {Q}=\mathcal {L}\left( J\right) *\mathcal {L}\left( J\right)\). We define the norm as
Here, \(\left\| \mathcal {R}_s(t)\right\| =\left\{ \sup \left\{ \left| \mathcal {R}_s(t) \right| \right\} :t\in J\right\}\), and all other norms for \(\mathcal {R}_e(t),\mathcal {R}_v(t),\mathcal {R}_i(t)\) and \(\mathcal {R}_r(t)\) are defined in the same way. By writing the above model using time fractional derivative of order \(\mho \in [0,1]\), we have its following form
having initial conditions
By making the use of Atangana–Baleanu fractional integral, the system of equations, stated above, may be transformed into Volterra type integral equations. The model in view of Theorem (3.3) may be expressed as
For the sake of simplicity, we let
Theorem 5.1
Lipschitz Condition and contraction will be satisfied by the kernels, defined above, \(\mathbb {U}_{1},\) \(\mathbb {U}_{2},\) \(\mathbb {U}_{3},\) \(\mathbb {U}_4\) and \(\mathbb {U}_{5}\), if one has the following inequalities:
Proof
To show this, we consider the kernel \(\mathbb {U}_{1}\left( t,\mathcal {R}_s\right) =\Theta +\xi \mathcal {R}_r(t)-\left( \frac{2\upsilon \mathcal {R}_i(t)}{\mathcal {R}_s(t)+\mathcal {R}_i(t)}+\omega +\tau \right) \mathcal {R}_s(t)+\phi \mathcal {R}_v(t).\) Consider two functions \(\mathcal {R}_s\) and \(\mathcal {R}_{s_1}\), then
Taking, \(\alpha _{1}=2\upsilon +\omega +\tau ,\) we arrive at the result
Consequently, we have the Lipschitz condition for the kernel \(\mathbb {U}_{1}\), and furthermore if \(0\le \alpha _{1}\le 1,\) so one has also the contraction for \(\mathbb {U}_{1}\). In the similar way, we can show that all the remaining kernels fulfil the Lipschitz condition as below:
By using the kernels given in the Eqs. (5.8) and (5.9), system (5.4) can be written as
Now we can build the recursion relation as follows:
The initial conditions are also given as
The difference among successive terms may be established as follows:
It is worth noticing that
Considering the system (5.12), applying the norm and triangular inequality, we get
As the Lipschitz condition are satisfied by the Kernal, we have
for which we have,
In the similar manner, the following results are obtained:
\(\square\)
After establishing the above results, it is very easy for us to state and prove the following new Theorem.
Theorem 5.2
The Rabies disease model, represented by (5.2), has a solution with the condition
Proof
Since all the functions taken in the model (5.2) are bounded having kernels satisfying the Lipschitz condition, therefore from (5.16), we get the succeeding terms as :
Thus equalities given in (5.13) exist. The given functions are smooth. Now we prove the existence of solution of model (5.2) and these solutions are expressed in the form of above functions. For this, we assume
Our purpose is to show that \(\left\| a_{\infty }\left( t\right) \right\| \rightarrow 0\) ultimately. For this, we get
Repeating this process recursively, we obtain
Then at \(t_{\max },\) we have
Applying the limit \(n->\infty\), on both sides, we get \(\left\| a_{\infty }\left( t\right) \right\| \rightarrow 0\). Hence, the assertion is completed. \(\square\)
Uniqueness of the solution
Now, in this section, we prove the uniqueness of solutions for the system (5.2). To achieve this goal, we assume that another solution say \((\mathcal {R}_{s1}, \mathcal {R}_{v1}, \mathcal {R}_{e1}, \mathcal {R}_{i1}, \mathcal {R}_{r1})\), exists. We will proceed as follows,
We get the following result, using the property of norm:
By the application of Lipschitz condition, one has
This gives
According to Theorem (5.2), \(\left( 1-\frac{ 1-\mho }{\mathfrak {M(\mho )} }\alpha _{1}+\frac{t^{\mho }\alpha _{1}}{N\left( \mho \right) \Gamma \left( \mho \right) }\right) >0,\) for \(\mho \in [0,1]\) and \(\alpha _{1} \in [0,1]\). Thus
Thus we have
Applying the same procedure, it can be shown that
\(\mathcal {R}_{v}\left( t\right) =\mathcal {R}_{v1}\left( t\right) , \mathcal {R}_{e}\left( t\right) =\mathcal {R}_{e1}\left( t\right) , \mathcal {R}_{i}\left( t\right) =\mathcal {R}_{i1}\left( t\right) , \mathcal {R}_{r}\left( t\right) =\mathcal {R}_{r1}\left( t\right)\). In this way, solution of system (5.2) is unique.
Numerical scheme
Some special problems involving rate of change having non-local kernel without singularity, has been solved numerically by applying a very novel technique recently developed by Toufik and Atangana [19]. In their work, two salient features can be easily seen, one the quick convergence of the problem to the solution and other is high accuracy. Their applied method can be comprehend easily by considering an ordinary differential equation in non linear form as:
The fractional integral equivalent to initial value problem (6.1) is given as
The integral Eq. (6.2), for \(t=t_{n+1}\), \(n=0,\) 1, \(2 \ldots ,\) can be written as
The application of Lagrange polynomial interpolation on the function \(\mathfrak {h}\left( z,\mathfrak {u}\left( z\right) \right)\) in two steps for the interval \(\left[ t_{k},t_{k+1}\right]\) gives the result as
If we again consider Eq. (6.3) for \(\mathfrak {f}\left( z,u\left( z\right) \right)\) together with the Lagrange polynomial interpolation, we have:
We obtain the following equality, after calculating the integral expression given in the above sum,
where \(R_{n}^{\mho }\) is the remainder term which is expressed as
The error upper bound has been given in \(\left[ 19 \right] .\)
Numerical scheme for system of equations representing rabies model
Now, we consider Rabies model given in (5.2). We have seen that the model can be expressed in the form of kernels through the application of Atangana–Baleanu fractional integral. New form will be as follows:
Also the initial conditions
where \(^{i}R_{n}^{\mho },\) \(i=1,2,3,4,5\) are remainders which has representation as
Numerical simulation
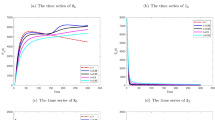
In this section, we give the graphical illustration of the numerical scheme developed earlier. We simulate the model by assuming the initial values of the variables and suitable values of the parameters. The initial values of susceptible, vaccinated, exposed, infectious and recovered are taken as 400, 200, 100, 20 and 10, respectively. Parameter values are taken as \(\Theta =125,\xi =0.1,2\upsilon =0.878,\omega =0.081,\tau =0.054,\phi =0.1,\varepsilon =0.8,\sigma =0.0078,\phi =0.8378,\psi =0.8,\Omega =15.\) We simulate the model up to 1000 days for different values of \(\mho\) and get the solution for each class. Figure 1 shows the solutions of \(\mathcal {R}_{s},\mathcal {R}_{v},\mathcal {R}_{e},\mathcal {R}_{i}\) and \(\mathcal {R}_{r}\) for the variation of \(\mho\) from 0.8 to 1. It can be observed that all the classes of animal population approach the same endemic level and it is independent of the fractional value of \(\mho .\) Figure 1a shows the endemic level of susceptible animals corresponding to the values of \(\mho\) from 0.8 to 1. There is a slight change in endemic level when the value of \(\mho\) approach 1. Figure 1b express the constant level of vaccinated animals. This level changes from 1019 to 1031 as \(\mho\) changes from 0.8 to 1. Figure 1c indicates the reduction in exposed population and it can be seen that the animals belonging to the exposed class approach the same number even if the values of \(\mho\) is varied from 0.8 to 1. The behavior of infectious animals having rabies disease is expressed in Fig. 1d. We can see that infectious animals approach the unique endemic level. Figure 1e shows that the recovered population approach the unique constant level. Figure 2 shows the endemic level of susceptible animals. Figure 2a,b shows that susceptible animals approach the unique endemic level for the fractional values of \(\mho .\) This unique endemic level also occurs for \(\mho =1.\) This phenomena is shown in Fig. 2c. Taking the time period of 1000 days vaccinated class is plotted in Fig. 3. Figure 3a shows that vaccinated animals increase initially and then approach the constant level with the passage of time but with the slight difference. Figure 3b indicates that small difference in the endemic level disappear when we take \(\mho =1.\) Solutions of exposed class is expressed in Fig. 4. It can be observed, from Fig. 4a that the solutions of this class differ slightly when the value of \(\mho =0.8.\) When fractional derivative is taken 0.9 the endemic level tends to uniqueness and unique value can be observed for \(\mho =1.\) and it can be seen in Fig. 4b,c. However Fig. 4b shows the minor change in the endemic level for \(\mho =0.9,\) but there is no change in exposed cattle for integral value of \(\mho\) as shown in Fig. 4c. Infected animals having rabies disease is shown in Fig. 5. We can see, from Fig. 5a–c, that animals with rabies disease approach the unique constant level for \(\mho =0.8,\mho =0.9\) and \(\mho =1.\) Figure 5a shows that the number of infected animals approach the endemic level after passing some days. The constant is approached earlier by increasing the value of \(\mho\) as shown in Fig. 5b. Moreover, after very short period the number of infected animals become constant when we assume the integral value as expressed in Fig. 5c. Recovered class also show the unique endemic level for fractional and integral values of \(\mho .\) Figure 6a–c show this behavior. It can be seen, from Fig. 6a, significant change occurs in the early days when we take different initial values for \(\mho =0.8.\) This difference reduce when we approach fractional to integral value as shown in Fig. 6b. There is no change in the recovery class occurs for the integral value of \(\mho ,\) even though we change the initial values of recovered animals. It is shown in Fig. 6c. A very interesting phenomena of all classes can be seen in Fig. 7. When the time period is taken 50 days, we can see, from Fig. 7a, that oscillatory behavior occurs in each class of population. This pattern is also appear in Fig. 7b when time period is 100 days. However, the population approach constant level when we take \(t=500\) and it can be seen in Fig. 7c. The behavior of population, for \(\mho =1\), is shown in Fig. 8. We can see that the oscillator behavior of each class of population disappear when the value of \(\mho\) is taken 1 irrespective of the time period. Figure 8a–c show that for oscillatory behavior disappear for \(t=50,100\) and 500 for the integral value of \(\mho .\) Figure 8a shows that the cattle population approach the constant level when the time period is taken as 500 days. When we short the time interval up to 100 days, the population approach same constant level as shown in Fig. 8b. It can be confirmed from, Fig. 8c, that the number of cattle belonging to each compartment remain same after 50 days. Different behavior of vaccinated class is shown in Fig. 9. It can be seen, from graph shown in Fig. 9a, that vaccinated individuals increase without showing the oscillatory behavior when the time period is take as 50 days. Similar pattern of vaccination class is shown in Fig. 9b–c for \(t=100\) and 500. The value of \(\mho\) is taken as 0.8.
Conclusion
In this work, the rabies model with harmonic incidence function has been solved through the application of fractional derivative. The non-local kernal in the absence of singularity has been assumed while obtaining the outcomes of mathematical model recently suggested by Atangana and Baleanu. We have proved the existence of solutions of nonlinear ordinary differential equations through the fixed-point theorem. The uniqueness of solutions is also proved analytically. Borrowing the idea from Atangana and Toufik, numerical scheme has been developed for the fractional order \(\mho .\) The solutions have been presented graphically which shows that the uniqueness of solutions retained either the fractional value of the derivative is changed or the initial conditions are varied. However, it is shown graphically that, for small time interval, the fractional order present the extra features of all the classes, except vaccinated class, which is unable to present in the case of ordinary derivative.We have studied the impact of different values of fractional operator by varying initial values. We assumed the parameter values and it has been shown that for different initial values of classes, the solutions ultimately approach the same constant level. One can apply the model on actual available data and estimate the values of parameters. By utilizing these and taking the actual values as initial one can check that whether the population approach unique endemic level or not. If cattle attain the same values then identifying the significant parameters through sensitivity analysis, effective control measures could be taken to reduce the number of infected cattle. However, the complete eradication of the disease is not possible because the efficacy of vaccine to certain level which exhibits the phenomena of backward bifurcation.

Solution of the system (5.2) for different values of \(\mho\).

Endemic level of Susceptible Animals for different values of \(\mho .\).

Endemic level of Vaccinated Animals for different values of \(\mho .\).

Endemic level of Exposed Animals for different values of \(\mho .\).

Endemic level of Infectious Animals for different values of \(\mho .\).

Endemic level of Recovered Animals for different values of \(\mho .\).

Fluctuation in the solutions for different time periods.

Behavior of solutions for integral value of \(\mho .\).

Graphs of Vaccinated class for different time periods.
Data availability
The datasets used and/or analyzed during the current study available from the corresponding author on reasonable request.
References
Lempp, C. et al. Pathological findings in the red fox (Vulpes vulpes), stone marten (Martes foina) and raccoon dog (Nyctereutes procyonoides), with special emphasis on infectious and zoonotic agents in Northern Germany. PLoS ONE 12(4), e0175469 (2017).
Hankins, D. G. & Rosekrans, J. A. Overview, prevention, and treatment of rabies. in Mayo Clinic Proceedings, vol. 79(5), 671–676 (2004).
Barecha, C. B., Girzaw, F., Kandi, V. & Pal, M. Epidemiology and public health significance of rabies. Perspect. Clin. Res. 5(1), 55–67 (2017).
Isife, K. Application of Elzaki’s method on fractional differential equations. J. Fract. Calc. Nonlinear Syst. 5(1), 71–77 (2024).
Gohar, A., Abdel-Khalek, M., Yaqut, A., Younes, M. & Doma, S. Gohar fractional effect on the diatomic structure and ro-vibrational spectroscopy in the molecular Kratzer model. J. Fract. Calc. Nonlinear Syst. 5(1), 52–70 (2024).
khan, S. Existence theory and stability analysis to a class of hybrid differential equations using confirmable fractal fractional derivative. J. Fract. Calc. Nonlinear Syst. 5(1), 1–11 (2024).
Demirci, E. A new mathematical approach for Rabies endemy. Appl. Math. Sci. 8(2), 59–67 (2014).
WHO Rabies Modelling Consortium. Zero human deaths from dog-mediated rabies by 2030: Perspectives from quantitative and mathematical modelling. Gates Open Res. 3, 1564 (2019).
Kanankege, K. S. et al. Identifying high-risk areas for dog-mediated rabies using Bayesian spatial regression. One Health 15, 100411 (2022).
Renald, E., Kuznetsov, D. & Kreppel, K. Sensitivity analysis and numerical simulation of a SEIV basic dog-rabies mathematical model with control. Int. J. Adv. Sci. Res. Eng. 5, 142–147 (2019).
Liu, G., Chen, J., Liang, Z., Peng, Z. & Li, J. Dynamical analysis and optimal control for a SEIR model based on virus mutation in WSNs. Mathematics 9(9), 929 (2021).
González-Roldán, J. F. et al. Cost-effectiveness of the national dog rabies prevention and control program in Mexico, 1990–2015. PLoS Negl. Trop. Dis. 15(3), e0009130 (2021).
Kanda, K., Jayasinghe, A., Jayasinghe, C. & Yoshida, T. Public health implication towards rabies elimination in Sri Lanka: A systematic review. Acta Trop. 223, 106080 (2021).
Lushasi, K. et al. Reservoir dynamics of rabies in south-east Tanzania and the roles of cross-species transmission and domestic dog vaccination. J. Appl. Ecol. 58(11), 2673–2685 (2021).
Kumar, P., Erturk, V. S., Yusuf, A., Nisar, K. S. & Abdelwahab, S. F. A study on canine distemper virus (CDV) and rabies epidemics in the red fox population via fractional derivatives. Res. Phys. 25, 104281 (2021).
Zarin, R., Ahmed, I., Kumam, P., Zeb, A. & Din, A. Fractional modeling and optimal control analysis of rabies virus under the convex incidence rate. Res. Phys. 28, 104665 (2021).
Aydogan, S. M., Baleanu, D., Mohammadi, H. & Rezapour, S. On the mathematical model of rabies by using the fractional Caputo–Fabrizio derivative. Adv. Differ. Equ. 2020(1), 382 (2020).
Garg, P. & Chauhan, S. S. Stability analysis of a solution for the fractional-order model on rabies transmission dynamics using a fixed-point approach. Math. Methods Appl. Sci. https://doi.org/10.1002/mma.9903 (2024).
Atangana, A. & Baleanu, D. New fractional derivatives with nonlocal and non-singular kernel: theory and application to heat transfer model (2016). arXiv preprint arXiv:1602.03408.
Kumar, S., Kumar, A., Samet, B., Gómez-Aguilar, J. F. & Osman, M. S. A chaos study of tumor and effector cells in fractional tumor-immune model for cancer treatment. Chaos, Solit. Fract. 141, 110321 (2020).
Ghanbari, B., Kumar, S. & Kumar, R. A study of behaviour for immune and tumor cells in immunogenetic tumour model with non-singular fractional derivative. Chaos, Solit. Fract. 133, 109619 (2020).
Thabet, S. T., Abdo, M. S., Shah, K. & Abdeljawad, T. Study of transmission dynamics of COVID-19 mathematical model under ABC fractional order derivative. Res. Phys. 19, 103507 (2020).
Logeswari, K., Ravichandran, C. & Nisar, K. S. Mathematical model for spreading of COVID-19 virus with the Mittag–Leffler kernel. Numer. Methods Part. Differ. Equ. 40(1), e22652 (2024).
Jajarmi, A., Arshad, S. & Baleanu, D. A new fractional modelling and control strategy for the outbreak of dengue fever. Physica A 535, 122524 (2019).
Baleanu, D., Jajarmi, A., Sajjadi, S. S. & Mozyrska, D. A new fractional model and optimal control of a tumor-immune surveillance with non-singular derivative operator. Chaos: Interdiscip. J. Nonlinear Sci. 29(8), 083127 (2019).
Jajarmi, A., Ghanbari, B. & Baleanu, D. A new and efficient numerical method for the fractional modeling and optimal control of diabetes and tuberculosis co-existence. Chaos: Interdiscip. J. Nonlinear Sci. 29(9), 093111 (2019).
Ghanbari, B. & Atangana, A. A new application of fractional Atangana–Baleanu derivatives: Designing ABC-fractional masks in image processing. Phys. A: Stat. Mech. Appl. 542, 123516 (2020).
Ahmad, W., Abbas, M., Rafiq, M. & Baleanu, D. Mathematical analysis for the effect of voluntary vaccination on the propagation of Corona virus pandemic. Res. Phys. 31, 104917 (2021).
Naveed, M. et al. Modeling the transmission dynamics of delayed pneumonia-like diseases with a sensitivity of parameters. Adv. Differ. Equ. 2021, 1–19 (2021).
Din, A., Li, Y., Khan, F. M., Khan, Z. U. & Liu, P. On Analysis of fractional order mathematical model of Hepatitis B using Atangana–Baleanu Caputo (ABC) derivative. Fractals 30(01), 2240017 (2022).
Naveed, M., Baleanu, D., Raza, A., Rafiq, M. & Soori, A. H. Treatment of polio delayed epidemic model via computer simulations (2022).
Zafar, Z. U. A., Yusuf, A., Musa, S. S., Qureshi, S., Alshomrani, A. S. & Baleanu, D. Impact of public health awareness programs on COVID-19 dynamics: A fractional modeling approach. (2023).
Baleanu, D. et al. Stability analysis and system properties of Nipah virus transmission: A fractional calculus case study. Chaos, Solit. Fract. 166, 112990 (2023).
Bhatter, S. et al. A new investigation on fractionalized modeling of human liver. Sci. Rep. 14(1), 1636 (2024).
Faiz, Z., Ahmed, I., Baleanu, D., & Javeed, S. A novel fractional dengue transmission model in the presence of Wolbachia using stochastic based artificial neural network (2024).
Shah, K., Khan, A., Abdalla, B., Abdeljawad, T. & Khan, K. A. A mathematical model for Nipah virus disease by using piecewise fractional order Caputo derivative. Fractals 32(02), 2440013 (2024).
Xue, Y., Han, J., Tu, Z. & Chen, X. Stability analysis and design of cooperative control for linear delta operator system. AIMS Math. 8, 12671–12693 (2023).
Ndendya, J. Z., Leandry, L. & Kipingu, A. M. A next-generation matrix approach using Routh–Hurwitz criterion and quadratic Lyapunov function for modeling animal rabies with infective immigrants. Healthc. Anal. 4, 100260 (2023).
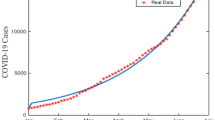
Shah, K. et al. Optimal control of COVID-19 through strategic mathematical modeling: Incorporating harmonic mean incident rate and vaccination. AIP Adv. 14(9), 095228 (2024).
Samko, S. G. Fractional integrals and derivatives. Theory and applications (1993).
Podlubny, I. Fractional Differential Equations: An Introduction to Fractional Derivatives, Fractional Differential Equations, to Methods of Their Solution and Some of Their Applications (Elsevier, 1998).
Atangana, A. & Koca, I. Chaos in a simple nonlinear system with Atangana–Baleanu derivatives with fractional order. Chaos, Solit. Fract. 89, 447–454 (2016).
Gu, Q., Chen, Y., Zhou, J. & Huang, J. A fast linearized virtual element method on graded meshes for nonlinear time-fractional diffusion equations. Numer. Algorithms https://doi.org/10.1007/s11075-023-01744-1 (2024).
Wu, Y. & Wang, G. Fractional Adams–Moser–Trudinger type inequality with singular term in Lorentz space and \(L^ P\) space. J. Appl. Anal. Comput. 14(1), 133–145 (2024).
Zhang, X., Zheng, Y., Jiang, Z. & Byun, H. Efficient algorithms for real symmetric Toeplitz linear system with low-rank perturbations and its applications. J. Appl. Anal. Comput. 14(1), 106–118 (2024).
Author information
Authors and Affiliations
Contributions
M.O. and T.H. provided the main concept of the problem and M.Z., A.A and S.S proved the existence and uniqueness of the solution and S.B did the numerical scheme for the solution. M. O. wrote the abstract and introduction. M. Z. wrote the manuscript. M. O. and T. H. plotted the curves through the MATLAB code. All authors reviewed the manuscript.
Corresponding author
Ethics declarations
Competing interests
The authors declare no competing interests.
Additional information
Publisher’s note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution-NonCommercial-NoDerivatives 4.0 International License, which permits any non-commercial use, sharing, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if you modified the licensed material. You do not have permission under this licence to share adapted material derived from this article or parts of it. The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by-nc-nd/4.0/.
About this article

Cite this article
Zainab, M., Boulaaras, S., Aslam, A. et al. Study of fractional order rabies transmission model via Atangana–Baleanu derivative. Sci Rep 14, 25875 (2024). https://doi.org/10.1038/s41598-024-77282-0
Received:
Accepted:
Published:
Version of record:
DOI: https://doi.org/10.1038/s41598-024-77282-0
