
Abstract
The introduction of (p, q)-rung linear Diophantine fuzzy set into the field of fuzzy set theory is a significant advancement, providing a broader perspective to address complicated decision-making scenarios. Alongside, the preference ranking organization method for enrichment of evaluation (PROMETHEE) emerges as a widely recognized tool for tackling multi-criteria decision-making challenges. This study contributes theoretically to the decision-making field by integrating (p, q)-rung linear Diophantine fuzzy sets into the PROMETHEE framework, improving (p, q)-rung linear Diophantine fuzzy sets adaptability and efficiency in practical aspects, the proposed framework can effectively address various intricate decision-making challenges encountered in real-world scenarios. This enhancement enables the (p, q)-rung linear Diophantine fuzzy sets to be more capable of handling a wide range of complex problems that arise in practical situations, making it a valuable tool for decision-makers looking to tackle real-life issues with precision and reliability. By illustrating the application of this extended method in the context of robot selection problem, the study showcases the practical utility and relevance of the proposed method. Furthermore, a comprehensive evaluation and discussion of the proposed PROMETHEE method is presented, emphasizing its validity, sensitivity, superiority, robustness, and adaptability in addressing real-world decision-making complexities
Similar content being viewed by others

Introduction
The rise of fuzzy set(FS) theory by Zadeh1 in 1965 has significantly influenced multi-criteria decision-making(MCDM) by providing a vital framework. This theory has proven to be invaluable in tackling complex challenges associated with decision-making processes. Moreover, it has emerged as an effective tool for handling fuzzy data in a systematic manner. Despite its advantages, the traditional FS theory struggles to accurately represent a neutral state, prompting Atanassov2 to introduce the concept of intuitionistic fuzzy set(IFS). The IFS features two key indices: membership grade(MG) and non-membership grade(NMG), which sum to a value between 0 and 1. However, real-world scenarios sometimes present situations where the sum of MG and NMG exceeds 1, leading to ambiguity in representing information accurately. To address this limitation, Yager3 proposed the Pythagorean fuzzy set(PFS), imposing constraints on the sum of \(MG^{2}\) and \(NMG^{2}\). This adjustment offered a solution for handling ambiguous data efficiently. Despite these advancements, the IFS and PFS theories occasionally fail to capture information accurately due to their restricted MG and NMG spaces. To expand the capabilities of the MG and NMG spaces, Yager4 proposed the notion of q-rung orthopair fuzzy set(q-ROFS). This innovative approach restricts the MS and NMS spaces to the total of the qth power of MG and NMG, enhancing the descriptive power of the theory. Then, as an extension of q-ROFS, p,q-quasirung orthopair fuzzy set((p,q)-QOFS) was presented by Seikh and Mandal5 in which MG is powered by p and NMG is powered by q and their total should lie within the interval [0,1]. Many real-life applications such as selection of a learning management system6, site selection for software operating units7 and choosing the best way of industrialization8 are discussed under q-ROF and (p,q)-QOF environment. Later, many operators are also established based on (p, q)-QOFS such as sin trignomentric aggregation operator9, confidence levels-based operators9, Hamacher aggregation operators10, dombi aggregation operators11. As mentioned previously, FS is unable to handle real-life problems in which NMG need to be considered. Even though IFS is capable of handling real-life problems with MG and NMG its capability in handling real-life problems is limited by the constraint that the sum of those MG and NMG should lie within the interval [0,1]. Likewise, PFS has the constraint that the sum of \(MG^{2}\) and \(NMG^{2}\) should lie within the interval [0,1] and q-ROFS has the constraint that the sum of \(MG^{q}\) and \(NMG^{q}\) should lie within the interval [0,1]. By recognizing these individual limitations of FS, IFS, PFS, and q-ROFS theories, Riaz and Hashmi12 developed the notion of linear Diophantine fuzzy set(LDFS). This notion includes the idea of reference parameters(RPs) that is RP of MG and RP of NMG which are specific property of the elements in the universal set according to MG and NMG respectively and the sum of these RPs should lie within the interval [0,1], thereby offering a more flexible and comprehensive framework for handling uncertain data. Later, various applications based on hybrid LDF and other hybrid fuzzy decision-making methods have been discussed by researchers such as climatic changes13, digital transformation14, teacher selection15, supplier selection16, decision making problem17,18, construction projects19, agri-drone20 and medical diagnosis21. However, the RPs in the LDFS theory are bounded by constraints, prompting Almagrabi22 to present the q-rung linear Diophantine fuzzy set(q-RLDFS), which extends the range of RPs by raising them to the qth power. This extension enables a broader exploration of reference parameters, enhancing the theory’s adaptability in addressing complex and ambiguous information in decision-making processes. Later, Panpho and Yiarayong23 introduced a pioneering concept termed a (p, q)-rung linear Diophantine fuzzy set((p, q)-RLDFS) utilizing the framework of double universes. This innovative approach offers enhanced flexibility when analyzing the symmetry relationships among multiple objects, enhancing the capabilities of the q-RLDFS. where the RP of MG is raised by pth power and the RP of NMG is raised by the qth power and the sum of these powered RPs should lie within [0, 1]. Further, the only condition for selecting p and q is that they need to satisfy the constraints in (p, q)-RLDFS, there are no other restrictions for selecting p and q. Both p and q can be same or different there is no restriction in it. This novel notion paves the way for a more in-depth understanding of complex relationships within the context of FS theory and further contributes to the advancement of theoretical frameworks in the field. Further many MCDM applications such as meterial selection24, smog mitigation25 and more26,27.
The PROMETHEE method established by Brans et al.28 in 1986 is a widely employed method for decision-making that enables decision-makers to analyze and prioritize complex alternatives based on multiple-criteria. This method entails a systematic process of comparing alternatives and determining their overall rankings, allowing decision-makers to gain valuable insights into the best course of action. With its ability to handle both quantitative and qualitative data, PROMETHEE provides a flexible and efficient framework for resolving intricate decision problems in various fields. By employing PROMETHEE, organizations can enhance their decision-making processes, leading to more informed choices and better outcomes.
Due to the classic PROMETHEE method’s limitations in solving decision-making problems under a fuzzy ambiance, the fuzzy PROMETHEE was proposed by Goumas and Lygerou29 to address this challenge comprehensively. Chen et al.30 introduced the fuzzy PROMETHEE method to address information system outsourcing, incorporating fuzzy numbers to rate criteria with respect to alternatives. Similarly, Abedi et al.31 extended the approach by applying the PROMETHEE II method in a fuzzy environment. Gul et al.32 advanced the PROMETHEE method through the integration of fuzzy logic, employing fuzzy numbers to tackle MCDM challenges effectively. The PROMETHEE II method is utilized in real-life situation such as bio-medical waste management33. Recognizing the need for further enhancements, the framework was subsequently extended to incorporate various fuzzy extensions, yielding significant advancements in decision-making analysis. These extensions included concepts such as IFS, PFS, and q-ROFS, leading to the development of specialized extentions of PROMETHEE such as intuitionistic fuzzy PROMETHEE, pythagorean fuzzy PROMETHEE, and q-rung orthopair fuzzy PROMETHEE by Liao and Xu34, Molla et al.35 and Akram and Shumaiza36 respectively.
The following are the research gaps:
-
The extensive review of existing literature highlights that numerous studies have explored MCDM within various fuzzy PROMETHEE methods. However, it is worth noting that the innovative (p,q)-RLDFS has not been integrated into the PROMETHEE method yet, indicating a potential research gap that could be further explored for enhancing decision-making processes in a broader context that are able to handle real-life MCDM situations that are unable to be handled with existing IF, PF, q-ROF, (p, q)-QOF and LDF MCDM methodologies.
-
Exploring the integration of (p, q)-RLDFS with PROMETHEE holds promise for enriching decision-making tools with enhanced adaptability and robustness, enabling a more comprehensive approach for tackling diverse real-life MCDM situations effectively. By bridging this research gap, researchers unlock novel insights and methodologies that can further elevate decision-making efficacy across various domains and sectors in the real-world.
The following are the study’s motivations:
-
By proposing the unique (p,q)-rung linear Diophantine fuzzy PROMETHEE((p,q)-RLDF PROMETHEE) method, this work seeks to address the existing research gaps in fuzzy decision-making methodologies. The innovative approach aims to provide a comprehensive solution that combines theoretical frameworks with practical applications, thus contributing significantly to the ongoing academic discussions in the field of fuzzy decision-making methodologies.
The following are the study’s objectives:
-
To introduce and delve into the concept of (p,q)-RLDF PROMETHEE further, one can ascertain its tremendous potential when employed in addressing complex MCDM challenges within the (p, q)-RLDF circumstances. This innovative framework not only showcases promising capabilities for intricate problem-solving scenarios but also provides a structured approach that enhances decision quality and accuracy.
-
To provide a clear illustration of the proposed (p,q)-RLDF PROMETHEE method, it is essential to offer a specific numerical example that effectively showcases how the method can be practically applied in decision-making processes. By presenting a detailed scenario with numerical values assigned to the alternatives and criteria involved, we can successfully demonstrate the functionality and effectiveness of this method in real-world situations.
The following are the study’s contributions:
-
In an effort to address existing research gaps, the study introduces a novel approach referred to as the (p,q)-RLDF PROMETHEE method. Through this proposed method, the study aims to provide insightful information to the field by offering a unique perspective on decision-making processes in a fuzzy environment. The focus lies on enhancing current knowledge and understanding within the research domain by exploring innovative methodologies that can help bridge gaps in existing literature.
-
In order to illustrate the effectiveness of the proposed (p,q)-RLDF PROMETHEE method, this study provides a detailed numerical example based on a real-world robot selection problem. The aim is to showcase how this innovative method can address complex decision-making scenarios in robot selection. By applying the (p,q)-RLDF PROMETHEE method to the specific case study, researchers were able to evaluate the performance and utility of the proposed PROMETHEE approach in robot selection. Through this case study, the study contributes valuable insights into the practical implementation and benefits of incorporating proposed PROMETHEE technique in complex real-world decision making situations.
-
In this study, a thorough comparative analysis has been incorporated to provide a comprehensive evaluation detailing the effectiveness and potency of the proposed (p,q)-RLDF PROMETHEE method. This detailed analysis not only explores the efficiency of the proposed method but also delves into its capability in decision-making scenarios. By comparing the model with existing methods, the study aims to highlight the unique features and advantages offered by the (p,q)-RLDF PROMETHEE approach, shedding light on its potential applications in real-world situations that require robust decision-making frameworks.
The list of most of the abbreviations and symbols used in this study is described in Tables 1 and 2 respectively.
The structure of the paper is as follows:
“Preliminaries” section provides the essential fundamental definitions, notations and the classic PROMETHEE method. The proposed (p,q)-RLDF PROMETHEE method is defined in “(p,q)-Rung linear Diophantine fuzzy PROMETHEE method” section. “Application” section includes an robot selection problem which demonstrates the effectiveness of the suggested PROMETHEE in solving MCDM problems. A comparison and discussion have been conducted in “Comparison and discussion” section to describe how the suggested PROMETHEE method is more effective than the existing ones. Lastly, the article’s conclusion is given in “Conclusion” section.
Preliminaries
This section offers the necessary definitions and notations for this article.
Throughout this paper, \({\mathfrak {U}}=\{{\mathfrak {u}}_{a}: a=1,2,...,m\}\) represents the universal set.
The classical PROMETHEE method devised by Brans et al.28 is an outranking approach for MCDM. The approach can handle various and complex criteria, and it just requires two sorts of information:
-
1.
Information about decision-maker preferences.
-
2.
Weight of criteria
Definition 2.1
2 An IFS \({\mathcal {I}}\) on \({\mathfrak {U}}\) is defined as
where, \(\Psi _{{\mathcal {I}}}({\mathfrak {u}})\) and \(\Upsilon _{{\mathcal {I}}}({\mathfrak {u}})\in\) [0,1] are MG and NMG with the restriction that
0\(\le \Psi _{{\mathcal {I}}}({\mathfrak {u}})+\Upsilon _{{\mathcal {I}}}({\mathfrak {u}}) \le\) 1 \(\forall {\mathfrak {u}}\in {\mathfrak {U}}\).
Definition 2.2
12 An LDFS \({\mathcal {L}}\) on \({\mathfrak {U}}\) is described as
where, \(\Psi _{{\mathcal {L}}}({\mathfrak {u}}), \Upsilon _{{\mathcal {L}}}({\mathfrak {u}}), \omega _{{\mathcal {L}}}({\mathfrak {u}})\) and \(\varpi _{{\mathcal {L}}}({\mathfrak {u}})\in\) [0,1] are MG, NMG and their corresponding RPs respectively, with the restrictions that 0\(\le \omega _{{\mathcal {L}}}({\mathfrak {u}})+\varpi _{{\mathcal {L}}}({\mathfrak {u}})\le\) 1 and
0\(\le \omega _{{\mathcal {L}}}({\mathfrak {u}})\Psi _{{\mathcal {L}}}({\mathfrak {u}})+\varpi _{{\mathcal {L}}}({\mathfrak {u}})\Upsilon _{{\mathcal {L}}}({\mathfrak {u}}) \le\) 1 \(\forall {\mathfrak {u}}\in {\mathfrak {U}}\)
Definition 2.3
23 An (p,q)-RLDFS \({\mathcal {Q}}\) on \({\mathfrak {U}}\) is described as
where, \(\Psi _{{\mathcal {Q}}}({\mathfrak {u}}), \Upsilon _{{\mathcal {Q}}}({\mathfrak {u}}), \omega _{{\mathcal {Q}}}({\mathfrak {u}})\) and \(\varpi _{{\mathcal {Q}}}({\mathfrak {u}})\in\) [0,1] are MG, NMG and their corresponding RPs respectively, with the restrictions that 0\(\le \omega _{{\mathcal {Q}}}^{p}({\mathfrak {u}})+\varpi _{{\mathcal {Q}}}^{q}({\mathfrak {u}})\le\) 1 and
0\(\le \omega _{{\mathcal {Q}}}^{p}({\mathfrak {u}})\Psi _{{\mathcal {Q}}}({\mathfrak {u}})+\varpi _{{\mathcal {Q}}}^{q}({\mathfrak {u}})\Upsilon _{{\mathcal {Q}}}({\mathfrak {u}}) \le\) 1 \(\forall {\mathfrak {u}}\in {\mathfrak {U}}\)
and \(\alpha =\{\langle \Psi _{{\mathcal {Q}}},\Upsilon _{{\mathcal {Q}}}\rangle , \langle \omega _{{\mathcal {Q}}},\varpi _{{\mathcal {Q}}}\rangle \}\) be a (p,q)-RLDF number((p,q)-RLDFN)
Definition 2.4
23 Let \(\alpha =\{\langle \Psi _{{\mathcal {Q}}},\Upsilon _{{\mathcal {Q}}}\rangle , \langle \omega _{{\mathcal {Q}}},\varpi _{{\mathcal {Q}}}\rangle \}\) be a (p,q)-RLDFN on \({\mathfrak {U}}\), then the score function of \(\alpha\) is defined as
(p,q)-Rung linear diophantine fuzzy PROMETHEE method
In this section, the PROMETHEE method under (p,q)-RLDF environment. We developed this model using (p,q)-RLDFN incorperate with classical PROMETHEE29.
In a MCDM problem, let us consider m alternatives \({\mathfrak {A}}=\{{\mathfrak {A}}_{1},{\mathfrak {A}}_{2},...,{\mathfrak {A}}_{m}\}\) and n criteria \({\mathfrak {C}}=\{{\mathfrak {C}}_{1},{\mathfrak {C}}_{2},...,{\mathfrak {C}}_{m}\}\). Then, we obtain the (p,q)-RLDF decision matrix in the form:

Where \(\alpha _{\imath \jmath }=\{\langle \Psi _{\imath \jmath },\Upsilon _{\imath \jmath }\rangle , \langle \omega _{\imath \jmath },\varpi _{\imath \jmath }\rangle \}\) is a (p,q)-RLDFN that shows the rating value of alternative \({\mathfrak {A}}_{\imath }\) in relation to criteria \({\mathfrak {C}}_{\jmath }\) for \(\imath\)=1,2,...,m and \(\jmath\)=1,2,...,n. The weight information of the criterion is represented as \({\mathfrak {w}} =\{{\mathfrak {w}}_{1}, {\mathfrak {w}}_{2},...,{\mathfrak {w}}_{n}\}\), which is a normalized weight vector with 0\(\le {\mathfrak {w}}_{\jmath }\le\) 1 for \(\jmath\)=1,2,...,n and \(\sum \limits _{\jmath =1}^{n}{\mathfrak {w}}_{\jmath }\)=1.
Now, we address the procedures for implementing the suggested model.
Step 1: Calculate the performance differences
This stage entails contrasting every pair of alternatives. Since the alternative’s rating values are (p,q)-RLDFN, we utilize the (p,q)-RLDFN scoring function (Definition 2.4) to evaluate the variances among the alternatives for each criterion. The following details how the ith alternative differs from the other alternatives:
Where, \({\mathfrak {s}}(\alpha _{\imath k})\) is the score value of \(\alpha _{\imath k}\).
Step 2: Build the preference function
If the difference is small, we take no preference into account; otherwise, we take a strong preference for larger difference values. We employ the indifference area and V-shape criterion function, which are described as
where \(p_{{\mathfrak {d}}}\) and \(q_{{\mathfrak {d}}}\) are parameters, with \(p_{{\mathfrak {d}}}\) representing the strict preference threshold and \(q_{{\mathfrak {d}}}\) representing the indifference threshold.
The preference function is shown in the Fig. 1.

V-shape criterion function with indifference area.
Step 3: Create a preference matrix and determine the aggregated preference value
This phase compares the overall preference index of option \({\mathfrak {A}}_{\imath }\) to alternative \({\mathfrak {A}}_{\jmath }\) across all criteria; the difference is stated by
Where \(\{{\mathfrak {w}}_{1},{\mathfrak {w}}_{2},...,{\mathfrak {w}}_{n}\}\) are the weights of the corresponding criteria \(\{{\mathfrak {C}}_{1},{\mathfrak {C}}_{2},...,{\mathfrak {C}}_{n}\}\). This results in the preference matrix below, with aggregated preference values as entries.

The aforementioned matrix’s diagonal members have no value. Therefore, there is no preference value provided when an alternative \({\mathfrak {A}}_{\imath }\)comparing the same alternative \({\mathfrak {A}}_{\imath }\).
Step 4: Calculate the leveling and entering flows
The preference matrix compares each alternative \({\mathfrak {A}}_{\imath }\) to other (m-1) alternatives in \({\mathfrak {A}} = {{\mathfrak {A}}_{1}, {\mathfrak {A}}_{2},..., {\mathfrak {A}}_{m}}\). The leveling flow is then calculated as follows:
i.e., the leveling flow of the \(\imath\)th alternative equals the average value of the preference matrix’s \(\imath\)th row. The entering flow is determined as follows:
and for the alternate \({\mathfrak {A}}_{\imath }\), this is the \(\imath\)th column’s average value.
In a leveling flow, the relative superiority of one option over another is indicated. Similar to this, entering flow shows how much one alternative is outperformed by another.
Step 5: Determine net outranking flows
In PROMETHEE I, alternatives are ranked without considering net outranking flows. This strategy involves comparing one possibility to another at a time. PROMETHEE I uses leveling flow \(\Phi ^{+}({\mathfrak {A}}_{\imath })\) and entering flow \(\Phi ^{-}({\mathfrak {A}}_{\imath })\) to provide a partial order ranking. The partial pre-orders and the preference relation P, I, R are determined as follows:
If an alternative \({\mathfrak {A}}_{\imath }\) is identical to the alternative \({\mathfrak {A}}_{\jmath }\), then
Otherwise, there is no comparison between the alternatives, that is \({\mathfrak {A}}_{\imath }\;R\;{\mathfrak {A}}_{\jmath }\)
PROMETHEE II provides the alternative’s total ranking. In our suggested model, we primarily concentrate on this strategy. To implement the PROMETHEE II technique using (p,q)-RLDFN, the net outranking flow calculated as follows:
Then the complete orders P and I are obtained as
Step 6: Alternative’s ranking
In this stage, we use the PROMETHEE II technique to rank alternatives in decreasing order of net outranking flow and select the optimal alternative from the set of alternatives \({\mathfrak {A}}=\{{\mathfrak {A}}_{1},{\mathfrak {A}}_{2},...,{\mathfrak {A}}_{m}\}\).
The flowchart of the proposed method in Fig. 2

Flowchart of the proposed method.
Application
In this section an industrial robot selection problem is discussed as a real-life example for the proposed PROMETHEE method.
Case study
Industrial robots have revolutionized the manufacturing industry, reshaping traditional practices and ushering in a new era of automation and efficiency. These sophisticated machines, which are meticulously programmed to perform tasks typically carried out by human workers in industrial settings, are equipped with cutting-edge technologies such as artificial intelligence and machine learning. Through seamless integration of sensors and actuators, industrial robots swiftly adapt to diverse working conditions, coexisting harmoniously with human employees to ensure a safe and productive work environment.
The impact of industrial robots goes beyond mere task completion; their integration into production lines has yielded tangible benefits for companies in the manufacturing sector. By enhancing productivity levels, streamlining quality control processes, and reducing labor costs, industrial robots have become indispensable assets in today’s competitive market landscape. As technology advances at an unprecedented rate, industrial robots evolve into more versatile and sophisticated entities, continuously improving the efficiency and effectiveness of manufacturing operations across various industries.
Manufacturers worldwide are increasingly investing in these cutting-edge robotics solutions to meet evolving consumer demands for high-quality products delivered promptly. The relentless innovation in industrial robotics not only enhances operational efficiencies but also drives companies to stay ahead in the rapidly changing market dynamics. In this digital age, where precision and speed are paramount, industrial robots stand as emblematic figures that embody the fusion of technology and manufacturing prowess. Further, many studies have been conducted related to robots, such as the role of robots in maritime technology37 and robot selection38. This study presents a robot selection problem to choose an appropriate industrial robot using the proposed method.
Problem description
Suppose a company wants to choose an appropriate industrial robot from the set of five industrial robots \(\{{\mathfrak {A}}_{1}, {\mathfrak {A}}_{2}, {\mathfrak {A}}_{3}, {\mathfrak {A}}_{4}, {\mathfrak {A}}_{5}\}\) with parameters such as speed(\({\mathfrak {C}}_{1}\)), accuracy(\({\mathfrak {C}}_{2}\)), payload(\({\mathfrak {C}}_{3}\)), operating range(\({\mathfrak {C}}_{4}\)), protection level(\({\mathfrak {C}}_{5}\)). The description of parameters are as follows:
-
\({\mathfrak {C}}_{1}\): The speed at which industrial robots operate plays a crucial role in enhancing productivity within manufacturing facilities. Companies heavily rely on the efficiency and swiftness of these robots to meet production targets and maintain a competitive edge in the market. The precision at which industrial robots can perform their tasks is directly affected by their speed capabilities. Engineers continually strive to optimize and improve the speed of these robots to achieve higher levels of accuracy and consistency in their operations. A key consideration in designing industrial robots is finding the right balance between speed and precision to ensure optimal performance without compromising quality. Technological advancements continue to push the boundaries of how fast industrial robots can move and operate, unlocking new possibilities for automation in various industries. An increase in robot speed can have a domino effect on the overall efficiency of a production line, allowing for faster turnaround times and increased output. However, it is essential to carefully evaluate and test the speed limits of industrial robots to prevent any potential risks or errors that may arise from operating at high speeds.
-
\({\mathfrak {C}}_{2}\): Industrial robot accuracy is a crucial factor in ensuring precise and efficient operations within the manufacturing industry. The reliability and precision of industrial robots play a significant role in enhancing the overall productivity and quality of the production processes. High levels of accuracy in industrial robots enable businesses to maintain consistency in output and meet strict quality control standards. These robots are designed to perform repetitive tasks with a high degree of precision, resulting in minimized errors and increased efficiency in production lines. Moreover, the advanced technology integrated into industrial robots allows for real-time monitoring and adjustments to ensure optimal accuracy during operation. The calibration and maintenance of these robots are essential to uphold their accuracy levels and prevent deviations that could impact production quality and efficiency. In today’s highly automated manufacturing environments, the accuracy of industrial robots is paramount for meeting the demands of modern production standards and staying competitive in the global market. Manufacturers invest in state-of-the-art robotic systems to achieve the desired level of accuracy required for various applications, ranging from assembly and welding to painting and packaging. Overall, industrial robot accuracy is a key component that drives operational excellence and helps businesses deliver products of the highest quality while optimizing their production processes.
-
\({\mathfrak {C}}_{3}\): Industrial robot payload refers to the maximum weight that a robotic arm is designed to handle during operations. This payload capacity is a crucial consideration in industries where robots are used to automate manufacturing processes, as it determines the suitability of the robot for specific tasks. Ensuring that the payload falls within the robot’s specified capacity is essential for maintaining operational efficiency and safety in the workplace. Additionally, the payload capacity of industrial robots can vary significantly depending on the model and design, with some robots capable of handling small payloads for intricate tasks, while others are built to lift heavy objects in demanding environments. Furthermore, advancements in robot technology have led to the development of robots with enhanced payload capacities, allowing for more flexibility and versatility in industrial applications.
-
\({\mathfrak {C}}_{4}\): The industrial robot operating range refers to the specific area within which a robotic system is designed to perform its functions and tasks. This range is crucial for ensuring that the robot can effectively carry out its operations with precision and efficiency. Factors such as the reach, motion capabilities, and work envelope of the robot play a significant role in determining its operating range. Understanding and defining the operating range of an industrial robot is essential for setting up its parameters, programming its movements, and optimizing its performance for various manufacturing processes. Manufacturers often conduct thorough evaluations and tests to determine the optimal operating range for their industrial robots, taking into account factors like safety, compatibility with other equipment, and overall productivity. In industrial settings, the operating range of a robot is carefully calculated to maximize its utility and minimize the risk of collisions or errors during operation.
-
\({\mathfrak {C}}_{5}\): The protection level of industrial robots is a critical consideration in ensuring the safety and efficiency of their operation. Manufacturers often implement various safety features and protocols to safeguard workers and equipment from potential hazards. This includes implementing safety fences, emergency stop buttons, and sensors that can detect human presence near the robot’s working area. Moreover, advancements in technology have enabled the development of more sophisticated protective measures such as laser scanners and area monitoring systems that can further enhance the safety of industrial robots. Enforcing safety regulations and standards is also essential to guaranteeing a high protection level for industrial robots.
Evaluation process with proposed PROMETHEE method
A team of experts who possess extensive knowledge and experience in the field of robotics, especially as it pertains to automation in industrial settings, was set to analyze and evaluate the robots. From the team’s knowledge about the industrial robots they analyze the robots \(\{{\mathfrak {A}}_{1}, {\mathfrak {A}}_{2}, {\mathfrak {A}}_{3}, {\mathfrak {A}}_{4}, {\mathfrak {A}}_{5}\}\) according to the parameters \(\{{\mathfrak {C}}_{1}, {\mathfrak {C}}_{2}, {\mathfrak {C}}_{3}, {\mathfrak {C}}_{4}, {\mathfrak {C}}_{5}\}\) and express their opinion as (p,q)-RLDFN with \(\omega\)= highly effective and \(\varpi\)= not highly effective as RPs and obtained (p,q)-RLDFNs with p and q as 3 and 4 respectively since these p and q satisfies the constraints of (p, q)-RLDFS23 for the obtained (p, q)-RLDFNs. The obtained (p, q)-RLDFNs are constructed as the following decision matrix.

In this decision matrix, the robot \({\mathfrak {A}}_{1}\) and the parameter \({\mathfrak {C}}_{1}\) have the numeric value \(\langle\)(0.81,0.62), (0.73,0.70)\(\rangle\). This value represents that for the robot \({\mathfrak {A}}_{1}\) the expert’s team exhibits 81\(\%\) of membership and 62\(\%\) of non-membership according to the parameters \({\mathfrak {C}}_{1}\). The pair (0.73,0.70) represents the reference parameters, where we can note that for highly effective the team exhibits 73\(\%\) to the robot \({\mathfrak {A}}_{1}\) and for not highly effective the decision-making team exhibits 70\(\%\) to the robot \({\mathfrak {A}}_{1}\). In the same way all the other numeric values in this decision matrix are expressed.
Further, the decision-making team consider the weight information for the parameters as \({\mathfrak {w}}\)=(0.3, 0.2, 0.1, 0.2, 0.2) by the subjectivity of their knowledge and information about the parameters according to the alternatives
Step 1: Determine the performance difference
Using Eq. (2) the performance difference of one robot to the other robots
are determined by the experts team and presented in the Table 3
Step 2: Construct the preference function
Using the Eq. (3) the preference function are generated from the performance difference values by considering \(q_{{\mathfrak {d}}}\) and \(p_{{\mathfrak {d}}}\) as 0 and 0.9 respectively. The generated preference functions are presented in the Table 4
Step 3: Determine the aggregated preference value
Using Eq. (4) and weight information \({\mathfrak {w}}\) = (0.3, 0.2, 0.1, 0.2, 0.2) the total preference index are calculated and the preference matrix is formed as follows

Step 4: Calculate the leveling and entering flows
Using Eqs. (5) and (6), the leveling and entering flows are calculated and presented in the Table 5.
Step 5: Calculate net outranking flow
Using Eq. (7) the net outranking flow are calculated and presented in the Table 6.
Further, the graphical representation of the obtained values of the net outranking flow is shown in Fig. 3

Net outranking flow.
From Table 6 and Fig. 3 we can observe that by PROMETHEE II method we obtain the ranking of robots as \({\mathfrak {A}}_{1}>{\mathfrak {A}}_{3}>{\mathfrak {A}}_{4}>{\mathfrak {A}}_{2}>{\mathfrak {A}}_{5}\).
The obtained ranking states that the robot \({\mathfrak {A}}_{1}\) is the most appropriate robot for the company than of the other robots and the robot \({\mathfrak {A}}_{5}\) is the less appropriate robot for the company when compared to the other robots.
Comparison and discussion
In this section, the validity, sensitivity, superiority and robustness of the proposed method are discussed
Validity test
The link between alternatives, the coherence of the attributes, and the decision-maker’s objective assessments all affect how successful a MADM approach is. Three effective validity test criteria were developed by Wang and Triantaphyllou39, and they must be satisfied for a MADM method to be deemed valid.
The following are the test criteria:
Test criteria 1: If one chooses a poorer alternative instead of a non-optimal one without altering the weight of any characteristic, the optimal decision stays the same.
Test criteria 2: An effective method of decision-making must have the transitive character.
Test criteria 3: When the decision-making problem is divided into smaller sub-problems, the order of those smaller sub-problems must match the order of the original problem.
The following is an analysis at the validity of the proposed method:
Test criteria 1: Consider the same industrial robot selection problem with replacing the non-optimal alternative \({\mathfrak {A}}_{5}\) with an worse alternative \(\widetilde{{\mathfrak {A}}}\). Then, after analyzing these robots with the proposed (p,q)-RLDF PROMETHEE we obtain ranking as \({\mathfrak {A}}_{1}>{\mathfrak {A}}_{3}>{\mathfrak {A}}_{4}>{\mathfrak {A}}_{2}>\widetilde{{\mathfrak {A}}}\). It is evident from the outcome that the optimum answer doesn’t change. For the suggested approach, test criterion 1 is therefore true.
Test criteria 2 and 3: We split the robot selection problems into sub-problems as \(\{{\mathfrak {A}}_{1}, {\mathfrak {A}}_{2}, {\mathfrak {A}}_{3}\}\), \(\{{\mathfrak {A}}_{2}, {\mathfrak {A}}_{3}, {\mathfrak {A}}_{5}\}\), \(\{{\mathfrak {A}}_{1}, {\mathfrak {A}}_{4}, {\mathfrak {A}}_{5}\}\) and \(\{{\mathfrak {A}}_{2}, {\mathfrak {A}}_{3}, {\mathfrak {A}}_{4}\}\). Then using the proposed (p, q)-RLDF PROMETHEE we obtain the ranking of sub-problems as \({\mathfrak {A}}_{1}>{\mathfrak {A}}_{3}>{\mathfrak {A}}_{2}\), \({\mathfrak {A}}_{3}>{\mathfrak {A}}_{2}>{\mathfrak {A}}_{5}\), \({\mathfrak {A}}_{1}>{\mathfrak {A}}_{4}>{\mathfrak {A}}_{5}\) and \({\mathfrak {A}}_{3}>{\mathfrak {A}}_{4}>{\mathfrak {A}}_{2}\). Thus, we can notice that the total ranking stays the same as \({\mathfrak {A}}_{1}>{\mathfrak {A}}_{3}>{\mathfrak {A}}_{4}>{\mathfrak {A}}_{2}>{\mathfrak {A}}_{5}\). Thus, test criteria 2 and 3 are valid for the proposed method.
Sensitivity analysis
The influence of value of p and q is analysed as follows:
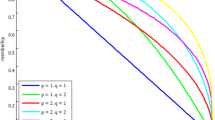
When the discussed robot selection problem is analyzed for various random combinations of p and q which satisfy the conditions of (p, q)-RLDFS for the (p, q)-RLDFNs in the proposed problem to show the uniformity in results. The following are some combinations of p and q which are randomly chosen (4, 4), (4, 5), (4, 6), and (5, 6) and these combinations of p and q satisfy the conditions of (p, q)-RLDFS for the (p, q)-RLDFNs in the proposed problem and they consistently yield identical rankings \({\mathfrak {A}}_{1}>{\mathfrak {A}}_{3}>{\mathfrak {A}}_{4}>{\mathfrak {A}}_{2}>{\mathfrak {A}}_{5}\) across all scenarios and it is presented as in the Table 7.
This uniformity in results underscores the robustness and reliability of the methodology employed to address the problem. Further the uniformity in results for different values of p and q is graphically represented in Fig. 4

Ranking of alternatives for different value of p and q.
Further, when p=q, the (p,q)-RLDFS becomes q-RLDFS, this transformation signifies a crucial versatility within the proposed PROMETHEE method, enabling it to effectively address practical scenarios characterized by q-RLDF environment. Further, by maintaining p and q as 1, the PROMETHEE method showcases its adaptive nature in accommodating real-life LDF situations, emphasizing its robustness in diverse decision-making contexts.
Moreover, the transition from (p,q)-RLDFS to q-RLDFS underscores the inherent flexibility of the PROMETHEE technique, indicating its ability to dynamically adjust its parameters based on specific conditions. This adaptability not only enhances the method’s applicability but also highlights its relevance in scenarios where different decision landscapes come into play. Furthermore, the PROMETHEE method’s capacity to handle varying levels of p and q showcases its adaptive decision-making framework, offering a comprehensive approach to address complex decision scenarios effectively.
Comparitive analysis
Since the (p,q)-RLDFS23 outperforms various fuzzy extensions like IFS2, PFS3, q-ROFS4, LDFS12, and q-RLDFS22 in terms of efficiency and accuracy, it significantly enhances the performance of the proposed (p,q)-RLDF PROMETHEE method when compared to current PROMETHEE methodologies such as fuzzy PROMETHEE29, intuitionistic fuzzy PROMETHEE34, pythagorean fuzzy PROMETHEE35 and q-rung orthopair fuzzy PROMETHEE36.
Further, the superiority of the proposed (p, q)-RLDF PROMETHEE over the existing PROMETHEE methods is described in Table 8.
Moreover, through its advanced computational and optimization capabilities, the (p,q)-RLDF PROMETHEE method surpasses the functionalities proposed by existing fuzzy PROMETHEE intuitionistic fuzzy PROMETHEE, pythagorean PROMETHEE, and q-rung orthopair fuzzy PROMETHEE methods.
Further, Moreover, the problem is specifically framed within the context of the (p,q)-RLDF environment, as elaborated in the related literature23. The discussed robot selection problem was performed by the algorithm presented in the existing methodology23 with some required modifications in data according to that algorithm presented in23 in which a decision making algorithm for (p,q)-RLDFS was presented based on (p,q)-RLDF aggregation operator, which also exhibits the same ranking \({\mathfrak {A}}_{1}>{\mathfrak {A}}_{3}>{\mathfrak {A}}_{4}>{\mathfrak {A}}_{2}>{\mathfrak {A}}_{5}\). Also, the proposed problem are analysed under the existing LDFS and q-RLDFS methodologies presented in40 in which einstein aggregation operator for LDFS is presented and22 in which aggregation operator based on q-RLDFS is presented respectively by assuming the proposed problems data as LDF number instead of the presented (p,q)-RLDFN the ranking of alternatives in the proposed problem remains same and they are presented in the Table 9. Since the LDFS and q-RLDF methodologies are unable to describe ranking of robots in the proposed problem with (p,q)-RLDFN it is not suitable to apply the (p,q)-RLDFN directly in methodologies presented in40 and22.
which describes the proposed methodologies superiority, since it has the ability to handle LDFS problems by considering p and q as 1 and also it has ability to handle q-RLDFS problems by considering p and q as same. Thereby verifying the credibility and effectiveness of the proposed approach for addressing challenges in decision-making. This alignment in results across different parameter settings and methodologies not only reinforces the method’s suitability but also highlights its applicability and transferability to diverse decision-making scenarios.
Furthermore, the incorporation of (p,q)-RLDFS into the PROMETHEE methodology not only enhances its performance but also extends its applicability to a wider range of scenarios and problem domains. The synergistic interaction between the PROMETHEE method and the fuzzy extensions enables a more comprehensive and nuanced analysis of decision-making criteria, resulting in more informed and effective decisions.
In addition, the superiority of the (p,q)-RLDF PROMETHEE method over existing methodologies highlights the continuous evolution of decision support tools in response to the growing complexity of decision-making processes. This adaptability, combined with the versatility of (p,q)-RLDFS, positions the (p,q)-RLDF PROMETHEE method as a cutting-edge solution that is capable of addressing the diverse needs of decision-makers in various fields.
Overall, the integration of (p,q)-RLDFS with the PROMETHEE framework represents a significant advancement in the field of decision analysis, offering a powerful and innovative approach that maximizes the accuracy, efficiency, and reliability of decision-making processes. The continued refinement and development of the (p,q)-RLDF PROMETHEE method underscores its potential to revolutionize decision support systems and pave the way for more informed and impactful decision-making strategies in the future.
Limitation
-
Even though, the proposed method is very effective in handling decision making scenarios when the handling real-life situation is not restricted by (p, q)-RLDFS restrictions or when the handling real-life situations need to handle multi-sub-attributes together the proposed method is limited to handle. Further, the proposed method is unable to deal complex fuzzy problems.
-
In the proposed method the weights of the criteria are assigned by the decision-making team according to their knowledge, since the existing methods to calculate weights are not applicable for (p,q)-RLDFS.
Conclusion
In the field of MCDM, the PROMETHEE methodology stands out as a widely recognized classical approach used for solving intricate problems efficiently. PROMETHEE method has been fused with many notable fuzzy extensions but not yet with (p, q)-RLDFS which need to be developed so that real-life decision-making problems under (p, q)-RLDF environment can be handled effectively that are unable to handle with the existing methods. By improving both theoretical concepts and practical problem-solving abilities, this work makes a substantial contribution to both academia and the actual world as follows
-
This study presented the (p, q)-RLDF PROMETHEE method which scientifically contributes to the real-world by its ability to deal real-world decision-making problems whose data can only be expressed as (p, q)-RLDFNs.
-
To showcase the proposed method’s ability a robot selection problem was analysed in detail with the proposed method.
Also, in this study, the validity of the proposed method is verified by the validity text criteria developed by Wang and Triantaphyllou, a proper sensitive analysis has been carried out to express the uniformity and influence of various values of p and q and a detailed comparative analysis of the proposed method with the existing notions has been conducted to express the superiority and robustness of the proposed method along with the limitations of the proposed method. The future direction of the study is as follows.
Future direction
In future, a promising pathway emerges for broadening the PROMETHEE methodology’s horizons by integrating a wide array of hybrid fuzzy structures. Among these enhancements are sophisticated models like complex non-linear Diophantine fuzzy sets41 and q-rung linear Diophantine fuzzy hypersoft sets42, which aim to address the identified limitations effectively, thus enhancing the methodology’s adaptability and versatility across diverse domains and applications. Further, to overcome the limitations in determining the weights of criteria, in future it is aimed to develop methods that have the ability to determine weights of the criteria for (p.q)-RLDF problems. Also, it is aimed to discuss real-life applications presented in43,44 such as plastic waste management and more.
Data availability
All data generated or analysed during this study are included in this published article.
Change history
12 February 2025
A Correction to this paper has been published: https://doi.org/10.1038/s41598-025-89512-0
References
Zadeh, L. A. Fuzzy sets. Inf. Control 8, 338–353 (1965).
Atanassov, K. T. Intuitionistic fuzzy sets. Fuzzy Sets Syst. 20, 87–96 (1986).
Yager, R. R. Pythagorean fuzzy subsets. In 2013 Joint IFSA World Congress and NAFIPS Annual Meeting (IFSA/NAFIPS), 57–61 (IEEE, 2013).
Yager, R. R. Generalized orthopair fuzzy sets. IEEE Trans. Fuzzy Syst. 25, 1222–1230 (2016).
Seikh, M. R. & Mandal, U. Multiple attribute group decision making based on quasirung orthopair fuzzy sets: Application to electric vehicle charging station site selection problem. Eng. Appl. Artif. Intell. 115, 105299 (2022).
Seikh, M. R. & Mandal, U. Multiple attribute decision-making based on 3, 4-quasirung fuzzy sets. Granul. Comput. 1–14 (2022).
Seikh, M. R. & Mandal, U. q-rung orthopair fuzzy Archimedean aggregation operators: application in the site selection for software operating units. Symmetry 15, 1680 (2023).
Seikh, M. R. & Mandal, U. Q-rung orthopair fuzzy frank aggregation operators and its application in multiple attribute decision-making with unknown attribute weights. Granul. Comput. 1–22 (2022).
Rahim, M., Garg, H., Khan, S., Alqahtani, H. & Khalifa, H.A.E.-W. Group decision-making algorithm with sine trigonometric p, q-quasirung orthopair aggregation operators and their applications. Alex. Eng. J. 78, 530–542 (2023).
Ahmad, T., Rahim, M., Yang, J., Alharbi, R. & Khalifa, H. A. E.-W. Development of p, q- quasirung orthopair fuzzy hamacher aggregation operators and its application in decision-making problems. Heliyon10 (2024).
Rahim, M. et al. Multi-criteria group decision-making based on dombi aggregation operators under p, q-quasirung orthopair fuzzy sets. J. Intell. Fuzzy Syst. 46, 53–74 (2024).
Riaz, M. & Hashmi, M. R. Linear diophantine fuzzy set and its applications towards multi-attribute decision-making problems. J. Intell. Fuzzy Syst. 37, 5417–5439 (2019).
Kannan, J., Jayakumar, V., Pethaperumal, M. & Kather Mohideen, A. B. An intensified linear diophantine fuzzy combined dematel framework for the assessment of climate crisis. Stochastic Environ. Res. Risk Assess. 1–15 (2024).
Jeevitha, K., Garg, H., Vimala, J., Aljuaid, H. & Abdel-Aty, A.-H. Linear diophantine multi-fuzzy aggregation operators and its application in digital transformation. J. Intell. Fuzzy Syst. 45, 3097–3107 (2023).
Saqlain, M. & Saeed, M. From ambiguity to clarity: unraveling the power of similarity measures in multi-polar interval-valued intuitionistic fuzzy soft sets. Decis. Mak. Adv. 2, 48–59 (2024).
Pethaperumal, M., Jayakumar, V., Edalatpanah, S. A., Mohideen, A. B. K. & Annamalai, S. An enhanced madm with l q* q-rung orthopair multi-fuzzy soft set in healthcare supplier selection. J. Intell. Fuzzy Syst. 1–12 (2024).
Anusuya Ilamathi, V. & Vimala, J. Multi-criteria decision making on lattice ordered multisets. In Intelligent Systems Technologies and Applications, 401–416 (Springer, 2018).
Pandipriya, A., Vimala, J. & Begam, S. S. Lattice ordered interval-valued hesitant fuzzy soft sets in decision making problem. Int. J. Eng. Technol. 7, 52–55 (2018).
Elraaid, U., Badi, I. & Bouraima, M. B. Identifying and addressing obstacles to project management office success in construction projects: An ahp approach. Spectrum Decis. Mak. Appl. 1, 33–45 (2024).
Jayakumar, V. et al. Development of complex linear diophantine fuzzy soft set in determining a suitable agri-drone for spraying fertilizers and pesticides. IEEE Access 11, 9031–9041 (2023).
Begam, S. S. & Vimala, J. Compositions on lattice ordered multi-fuzzy soft matrix and its simulated application in medical diagnosis. Math. Comput. Simul. 201, 555–563 (2022).
Almagrabi, A. O., Abdullah, S., Shams, M., Al-Otaibi, Y. D. & Ashraf, S. A new approach to q-linear diophantine fuzzy emergency decision support system for covid19. J. Ambient Intell. Human. Comput. 1–27 (2022).
Panpho, P. & Yiarayong, P. (p, q)-rung linear diophantine fuzzy sets and their application in decision-making. Comput. Appl. Math. 42, 324 (2023).
Sahoo, S. K., Choudhury, B. B. & Dhal, P. R. A bibliometric analysis of material selection using mcdm methods: Trends and insights. Spectr. Mech. Eng. Oper. Res. 1, 189–205 (2024).
Kousar, S., Ansar, A., Kausar, N. & Freen, G. Multi-criteria decision-making for smog mitigation: a comprehensive analysis of health, economic, and ecological impacts. Spectr. Decis. Mak. Appl. 2, 53–67 (2025).
Hussain, A. & Ullah, K. An intelligent decision support system for spherical fuzzy sugeno-weber aggregation operators and real-life applications. Spectr. Mech. Eng. Oper. Res. 1, 177–188 (2024).
Tešić, D. & Marinković, D. Application of fermatean fuzzy weight operators and MCDM model DIBR-DIBR II-NWBM-BM for efficiency-based selection of a complex combat system. J. Decis. Anal. Intell. Comput. 3, 243–256 (2023).
Brans, J.-P., Vincke, P. & Mareschal, B. How to select and how to rank projects: The promethee method. Eur. J. Oper. Res. 24, 228–238 (1986).
Goumas, M. & Lygerou, V. An extension of the promethee method for decision making in fuzzy environment: Ranking of alternative energy exploitation projects. Eur. J. Oper. Res. 123, 606–613 (2000).
Chen, Y.-H., Wang, T.-C. & Wu, C.-Y. Strategic decisions using the fuzzy promethee for is outsourcing. Expert Syst. Appl. 38, 13216–13222 (2011).
Abedi, M., Torabi, S. A., Norouzi, G.-H., Hamzeh, M. & Elyasi, G.-R. Promethee II: A knowledge-driven method for copper exploration. Comput. Geosci. 46, 255–263 (2012).
Gul, M., Celik, E., Gumus, A. T. & Guneri, A. F. A fuzzy logic based promethee method for material selection problems. Beni-Suef Univ. J. Basic Appl. Sci. 7, 68–79 (2018).
Seikh, M. R. & Mandal, U. Interval-valued fermatean fuzzy dombi aggregation operators and swara based promethee ii method to bio-medical waste management. Expert Syst. Appl. 226, 120082 (2023).
Liao, H. & Xu, Z. Multi-criteria decision making with intuitionistic fuzzy PROMETHEE. J. Intell. Fuzzy Syst. 27, 1703–1717 (2014).
Molla, M. U., Giri, B. C. & Biswas, P. Extended promethee method with pythagorean fuzzy sets for medical diagnosis problems. Soft. Comput. 25, 4503–4512 (2021).
Akram, M. & Shumaiza, S. Multi-criteria decision making based on q-rung orthopair fuzzy promethee approach. Iran. J. Fuzzy Syst. 18, 107–127 (2021).
Sahoo, S. K., Choudhury, B. B. & Dhal, P. R. Exploring the role of robotics in maritime technology: Innovations, challenges, and future prospects. Spectr. Mech. Eng. Oper. Res. 1, 159–176 (2024).
Imran, R., Ullah, K., Ali, Z. & Akram, M. A multi-criteria group decision-making approach for robot selection using interval-valued intuitionistic fuzzy information and aczel-alsina bonferroni means. Spectr. Decis. Mak. Appl. 1, 1–32 (2024).
Wang, X. & Triantaphyllou, E. Ranking irregularities when evaluating alternatives by using some electre methods. Omega 36, 45–63 (2008).
Iampan, A., García, G. S., Riaz, M., Athar Farid, H. M. & Chinram, R. Linear diophantine fuzzy Einstein aggregation operators for multi-criteria decision-making problems. J. Math. 2021, 5548033 (2021).
Shams, M., Almagrabi, A. O. & Abdullah, S. Emergency shelter materials under a complex non-linear diophantine fuzzy decision support system. Complex Intell. Syst. 9, 7227–7248 (2023).
Surya, A., Vimala, J., Kausar, N., Stević, Ž & Shah, M. A. Entropy for q-rung linear diophantine fuzzy hypersoft set with its application in MADM. Sci. Rep. 14, 5770 (2024).
Mandal, U. & Seikh, M. R. Interval-valued spherical fuzzy MABAC method based on Dombi aggregation operators with unknown attribute weights to select plastic waste management process. Appl. Soft Comput. 145, 110516 (2023).
Mandal, U. & Seikh, M. R. An integrated weighted distance-based approximation method for interval-valued spherical fuzzy magdm. In Fuzzy Optimization, Decision-making and Operations Research: Theory and Applications, 551–571 (Springer, 2023).
Acknowledgements
The article has been written with the joint financial support of RUSA-Phase 2.0 grant sanctioned vide letter No.F 24-51/2014-U, Policy (TN Multi-Gen), Dept. of Edn. Govt. of India, Dt. 09.10.2018, DST-PURSE 2nd Phase programme vide letter No. SR/PURSE Phase 2/38 (G) Dt. 21.02.2017 and DST (FIST - level I) 657876570 vide letter No.SR/FIST/MS-I/2018/17 Dt. 20.12.2018.
Author information
Authors and Affiliations
Contributions
Study conception and design: J.V, A.S, N.K; analysis and interpretation of results: J.V, A.S, N.K, D.P; review and validation: J.V, A.S, D.P, V.S, M.A.S; draft manuscript preparation: J.V, A.S, V.S, M.A.S. All authors reviewed the results and approved the final version of the manuscript.
Corresponding author
Ethics declarations
Competing interests
The authors declare no competing interests.
Additional information
Publisher’s note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
The original online version of this Article was revised: The original version of this Article contained an error in the spelling of the author Vladimir Simic, which was incorrectly given as Valdimir Simic.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution-NonCommercial-NoDerivatives 4.0 International License, which permits any non-commercial use, sharing, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if you modified the licensed material. You do not have permission under this licence to share adapted material derived from this article or parts of it. The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by-nc-nd/4.0/.
About this article

Cite this article
Vimala, J., Surya, A., Kausar, N. et al. Extended PROMETHEE method with (p,q)-rung linear Diophantine fuzzy sets for robot selection problem. Sci Rep 15, 69 (2025). https://doi.org/10.1038/s41598-024-81785-1
Received:
Accepted:
Published:
Version of record:
DOI: https://doi.org/10.1038/s41598-024-81785-1
This article is cited by
-
Yager-based operator interval-valued q-rung orthopair fuzzy CRITIC-WASPAS multi-attribute group decision-making method
Journal of Mathematics in Industry (2026)
-
Enhancing Diabetes Diagnosis Using FIT2GPFN-Integrated DEMATEL Method: A Multi-Criteria Fuzzy Decision-Making Approach
International Journal of Applied and Computational Mathematics (2025)
