
Abstract
This paper mainly investigates the stabilization problem of Takagi-Sugeno (T-S) fuzzy asynchronous Boolean control networks (ABCNs) under aperiodic sample-data state-feedback control. First, the system has been converted into a discrete time-delay system by using the theory of the semi-tensor product for matrices. After that, algebraic forms of the augmented ABCNs are obtained. Second, the stabilization of T-S fuzzy ABCNs with fixed time delay is researched. Based on that, noise is further considered in the time delay of ABCNs and the fixed time delay is altered to the unfixed case. Then, sufficient and necessary conditions for proposed stabilizations are derived by using different approaches. Ultimately, examples are provided to demonstrate the effectiveness and superiority of achieved results.
Similar content being viewed by others

Introduction
In recent decades, gene regulatory networks (GRNs) have been widely investigated because GRNs can be simplified and modeled mathematically as discrete-time Boolean networks (BNs). In 1969, Kauffman et al. proposed BNs1, in which binary node state represents “on” or “off” of gene expression. It should be noticed that node states in BNs are affected by logical signals from adjacent nodes. To simulate GRNs with external biological inputs, Boolean control networks (BCNs) are proposed in Ref.2. Up to now, BNs and BCNs have been widely utilized to simulate various networks, such as GRNs, multi-agent systems and so on.
In traditional BNs, all nodes are updated synchronously. However, biological processes including gene expression and protein synthesis exhibit asynchronous rhythm. This means genes and proteins are metabolized and expressed at different instants of time. To portray this phenomenon more realistically, Harvey introduced asynchronous random Boolean networks (ARBNs)3 in 1997. In Harvey ARBNs, only one node is randomly selected to update at one instant of time. Based on that, more flexible generalized asynchronous Boolean control networks (GABCNs) are proposed by Gershenson4. Compared with Harvey model, an arbitrary number of nodes in GABCNs can be selected at random to update their status at a given time point. Because genes and proteins independently update their states in GABCNs at different time instants, asynchrony in biological systems is more accurately simulated.
Recently, a generalized matrix multiplication named semi-tensor product (STP) was proposed by Cheng et al.5. With the help of STP, kinds of BNs can be represented as algebraic forms. As a result, myriad challenges in dynamics, such as stability6,7, set stabilization8,9, fault detection10,11, observability12, data loss13 are analyzed with STP.
In the past few decades, the analysis and synthesis of sampled-data systems have been extensively researched. The two types of sampling are periodic sampling and aperiodic sampling. Regarding periodic sampling, Liu et al. first applied sampled-data state feedback control (SDSFC) to the stabilization problem of BCNs in Ref.14. Some necessary and sufficient conditions for the global stabilization of BCNs were obtained by using SDSFC. In 2021, Ref.15 considered the event-triggered control design for the uniform sampled-data set stabilization of switched delayed Boolean control networks (SDBCNs). In 2022, the general partial synchronization of a type of drive-response Boolean control networks (BCNs) was proposed for the first time and was addressed by sampled-data feedback control (SDFC) in Ref.16. In 2024, Ref.10 addressed the fault detectability problem for the asynchronous delayed Boolean control networks (ADBCNs) with sampled-data control (SDC) scheme. Regarding aperiodic sampling, Ref.17 introduced a novel method for the global stochastic stability analysis of aperiodic sampled-data Boolean control networks (BCNs) . The sampling instants of aperiodic sampled-data control (ASDC) are uncertain. Ref.18 provided a novel technique for the global stability analysis of Boolean control networks (BCNs) under aperiodic sampled-data control (ASDC). Derived from a simplified intelligent traffic control system, Ref.19 considered the sampled-data controllability and stabilizability of Boolean control networks. The paper models mentioned above are all synchronous models. More research has been conducted on synchronous Boolean networks, while less attention has been paid to asynchronous Boolean networks. This article considers asynchronous models. Asynchronous Boolean networks can more accurately reflect the real dynamic processes of biological systems and have greater universality compared to synchronous Boolean networks.
Time delays are ubiquitous in social networks, transportation networks and biological networks. Especially, time delay exists in the translation process of mRNA from the nucleus to the cytoplasm in GRNs. Therefore, modeling and stabilization of BCNs with time-delay have potential applications in the research of GRNs. For example, Ref.20 investigated sampled-data set stabilization of constrained delayed BCNs with Lyapunov-based approach, Ref.21 investigated the controllability of BCNs with multiple time delays in both node states and controllers, Ref.22 dealt with the extended dissipativity and non-fragile synchronization of delayed recurrent neural networks (RNNs) with multiple time-varying delays and sampled-data control. It is worth noting that practical delays are not ideal and they are always influenced by network noise. Thus, it is necessary to consider the impact of noise in the research of network delay. This article considers the time delay affected by noise.
BNs are effective models used to analyze binary logic. However, networks cease to function effectively if node states are not ’either black or white’. In practice, certainty is ideal and hard to be achieved, so it is necessary to fuzzify the basic model of BNs. By using interpolated Boolean algebra to fuzzify Boolean networks, the generated model maintains a Boolean framework. Fuzzy Boolean networks (FBNs) make it possible to simultaneously handle the randomness and the fuzziness inherent in biological phenomena, by determining gene expression levels with fuzzy logic rules. In 2019, Ref.23 investigated the observability of T-S FBNs with time-varying delay. In 2024, Ref.24 investigated the event-triggered-based adaptive finite-time resilient control problem for the uncertain MIMO nonlinear stochastic system with unknown sensor deception attacks and Ref.25 investigated the problem of adaptive event-triggered-based security controller construction for nonlinear networked control systems under multiple network attacks. Many studies also focus on the combination of fuzzing and sampled-data control. For example, Ref.26 addressed the finite-time non-fragile sampled-data control for a T-S fuzzy system with passivity and passification approaches. Ref.27 presented a T-S fuzzy-based sampled-data controller for switched chaotic systems. Ref.28 reported the dynamics of the T-S fuzzy memristor-based hidden system via sampled-data control. In order to further study the dynamics of T-S FBNs and make the model practical, this paper researches the stabilization of T-S fuzzy asynchronous Boolean control networks (FABCNs) with time delay influenced by network noise. Moreover, sampled-data control is employed in the research process.
On the whole, the stabilization of FABCNs with time delay influenced by network noise under aperiodic sampled-data control(SDC) is studied. Firstly, the dynamical model of FABCN with fixed time delay is constructed and a criterion for the stabilization of FABCNs with time delay under aperiodic SDC is presented. Secondly, the impact of noise on time delay is taken into consideration and the noise varies periodically. Finally, two criterions are given to prove the stabilization of FABCNs with time delay influenced by network noise. Mainly contributions are listed as follows:
-
STP makes it more efficient to describe and analyze the dynamic model of FABCNs with time delay that are influenced by noise.
-
Implementing sampled-data control for the augmented system makes the system modeling and analysis more straightforward.
-
Considering complexities involved, studying the stabilization of FABCNs through two distinct methods makes the results more reliable.
The rest paper is organized as follows: “Preliminaries” introduces essential definitions and lemmas, describes the T-S fuzzy model and establishes algebraic expressions for FABCNs. “Results” gives the T-S FABCNs model and presents the stabilization theorem of FABCNs with the fixed time delay. Besides that, the impact of noise on time delay is analyzed and a stabilization theorem of FABCNs with time delay influenced by noise is given by using the Lyapunov method. Then, “Examples” provides three examples to verify these obtained results. Finally, conclusion is summarized in “Conclusion”.
Preliminaries
Notations and STP of matrices
The symbol explanations regarding STP are presented in Table 1.
Definition 1
For two matrices \(\hat{A} \in \mathbb {M}_{m\times n}\) and \(\hat{B} \in \mathbb {M}_ {s\times t}\), the STP of \(\hat{A}\) and \(\hat{B}\) is
where \(c = lcm(n,s)\) .
Definition 2
29 The Khatri-Rao product of two matrices \(\hat{A} \in \mathbb {M}_{m\times n}\) and \(\hat{B} \in \mathbb {M}_{s\times n}\) are defined in the following way:
if n = s, then the STP degenerates to the traditional matrix multiplication.
Next, the transposition matrix and the power reducing matrix are presented.
-
(1)
Let \(\varkappa \in \mathbb {R}_m\) and \(\varepsilon \in \mathbb {R}_n\), then \(\varepsilon \varkappa = W_{[m,n]}\varkappa \varepsilon\), where \(W_{[m,n]} \in \mathcal {M}_{mn \times mn}\) is a transposition matrix. Especially, if \(m=n\), \(W_{[m,n]}\) is expressed as \(W_{[n]}\).
-
(2)
For any \(D \in \Delta _n\), \(D^2=\Phi _ND\). \(\Phi _N\) is said to be the power reducing matrix and \(\Phi _N:=Diag\left\{ \delta _{2^n}^1, \delta _{2^n}^2, \cdots ,\delta _{2^n}^{2^n}\right\}\).
Definition 3
Suppose that \(b_f \in \Delta _2\), \(f \in \{1,2,\cdots ,n\}\) and \(G = \{g_1, g_2,\cdots ,g_k\} \subset \{1,2,\cdots ,n\}\), then
where
Lemma 1
30 If \(\hat{ {F}}(\hat{a}_1,\hat{a}_2,\cdots ,\hat{a}_m)\) is a logical function with m logical variables \(\hat{a}_1,\hat{a}_2,\cdots ,\hat{a}_m\), then
where matrix \(L_{\hat{ {F}}}\) \(\in\) \(\mathcal {L}_{2\times 2^m}\) is the structure matrix of logical function \(\hat{ {F}}\).
T-S fuzzy systems
For several n-order discrete systems, their T-S fuzzy state space models can be described as:
where \(j=1,2,\cdots ,n\) and \(k=1,2,\cdots ,s\). \(M_j^{k}\) are fuzzy sets and \(R_k\) is the k-th fuzzy rule. \(z(t)=[z_1(t),z_2(t),\cdots ,z_n(t)]^{\textsf{T}}\) are states and u(t) are controllers; s is the number of fuzzy inference rules. For the k-th subsystem, \(A_k \in \mathbb {R}_{n\times n}\) is the system matrix, \(B_k \in \mathbb {R}_{n \times m}\) is the control matrix and \(C_k\) is constant vector. Generally, \(C_k\) is a zero vector.
Suppose that \(\mu _{M_j^{k}}\) represents the membership function of \(z_i\) on a fuzzy subset \(M_j^{k}\). It also represents the degree of use of the k-th rule. If the fuzzy set is used for blurring and the weighted average method is used for clarification, the global system can be obtained as follows:
where \(\mu _k(z)=\frac{\varepsilon _i(z)}{\mathop {\sum }\limits _{\kappa =1}^{s}\varepsilon _\kappa (z)}\) is the weight of the k-th rule. \(\varepsilon _i(z)=M_1^{k}\wedge M_2^{k}\wedge \cdots \wedge M_n^{k}\) is the activation degree of k-th rule on z, \(\wedge\) is the fuzzification operator, which is always defined as the product or taking the smaller operation.
Problem formulation
Dynamics of GABCNs are presented as following forms:
and dynamics of GABCNs with time delay affected by noise can be represented as follows:
where \(\tau\) represents time delay and \(\gamma\) represents noise. \(-\tau \le \gamma \le \gamma _{max} \le 0\) and \(\gamma _{max}=\textrm{max}\{\gamma _1,\gamma _2,\cdots ,\gamma _n\}\). Schematic diagram of the relationship between noise variation and sampling period length is shown in Fig. 1.
Remark 1
Asynchronous refers to a situation where the updating of nodes does not occur in a synchronous manner. At each time point, an arbitrary number of nodes are randomly selected to update their states.
Remark 2
In this study, the variation of noise is periodic and the length of noise period is T. At the beginning of each period, noise changes its value and maintains the value in the whole period. Taking noise interference into account in the model can make the model closer to the actual situation and improve the model’s ability to describe real-world scenarios. But at the same time, it increases the computational complexity. This article reduces the complexity by treating the noise as a bounded random variable.
Dynamics of sampled-data controllers can be expressed as follows:
where \(x_i\) \(\in\) \(\Delta _2\), \(i\in [1,n]\) are logical variables and \(u_l(t)\) \(\in\) \(\Delta _2\), \(l \in [1,m]\) are controllers. \(f_i\) is logical function and \(H_t\) denotes the set of update nodes. It is worth noting that sampling interval \(h_k\) are uncertain. \(\theta _0=0\) and \(h_k \triangleq \theta _{k+1}-\theta _k\) is the k-th sampling interval, \(k=0,1,\cdots\).

Schematic diagram of the relationship between noise variation and sampling period length.
Define \(\varvec{x}(t):=\ltimes _{i=1}^{n}x_i(t)\), \(\varvec{u}(t):=\ltimes _{l=1}^{m}u_l(t)\) and \(\varvec{z}(t)= \varvec{x}(t-(\tau +\gamma _{max}))\ltimes \varvec{x}(t-(\tau +\gamma _{max}-1))\ltimes \cdots \ltimes \varvec{x}(t)\). \(M_i\) \(\in\) \(\mathcal {L}_{2\times 2^{n+m}}\) is the structure matrix of \(f_i\). As a result, Eq.(2) can be expressed as
where \(\begin{bmatrix} M^j= \varvec{1}_{(\tau +\gamma _{max}-1)n+j-1}^T\otimes I_2 \otimes \varvec{1}_{2^{(\tau +\gamma _{max})n-j}}^T \end{bmatrix}\). Then Eq. (3) can be described as
where \(H_j\) \(\in\) \(\mathcal {L}_{2\times 2^n}\). According to Lemma 1, Eq. (5) can be described as:
and Eq. (4) can be further expressed as:
where \(G^{\prime }_{\alpha s} = H _1*H_2*\cdots *H_m \in \mathcal {L}_{2^m\times 2^n}\) and \(L_{\alpha s} = M_1*M_2*\cdots *M_n \in \mathcal {L}_{2^{n}\times 2^{n(\tau +\gamma _{max}+1)+m}}\). \(\alpha\) represents the \(\alpha\)-th noise and s represents the s-th update method.
By calculation, the Eq. (7) can be expressed as the following augmented system:
where \(\hat{L}_{\alpha s}=(E_d)^{n}(I_1\otimes L_{\alpha s})W_{[2^m,2^{n(\tau +\gamma _{max}+1)}]}(I_{2^m}\otimes \Phi _1)\).
Moreover, state feedback SDC of Eq. (8) can be expressed as:
Substitute Eq. (9) into Eq. (8), then
where \(W_1=W_{[2^{n(\tau +\gamma _{max}+1)},2^m]}\), \(I_1=I_{2^{n(\tau +\gamma _{max}+1)}}\) and \(\Phi _1=\Phi _{n(\tau +\gamma _{max}+1)}\).
Then, system (8) with state feedback SDC can be expressed as follows:
where \(\overline{L}_{\alpha s}=(\hat{L}_{\alpha s}W_1)^{h_k}\big (I_1 \otimes ((\Phi _m)^{h_k-1}G_{\alpha s})\big )\Phi _1\).
Results
The basic concepts of T-S FABCNs system
In the following paper, FABCNs are represented as F and \(F_k\) denotes k-th fuzzy subsystem.
Definition 4
F with time delay and noise can be established as follows:
Equation (11) can also be expressed as
where \(j=1,2,\cdots ,n\) and \(k=1,2,\cdots ,s\). \(M_i^{k}\) are fuzzy sets and \(R_k\) is the k-th fuzzy rule. \(\varvec{x}(t)\), \(\varvec{u}(t)\) and \(\varvec{z}(t)\) are same defined as in Eq. (4). \(L_{\alpha s}\) is the structural matrix of original system and \(\overline{L}_{\alpha s}\) is the structural matrix of augmented system. \(L_{\alpha s}\) and \(\overline{L}_{\alpha s}\) are the fuzzy posterior part of the k-th rule in the system.
Let \(\mu _{M_i^{k}}\) represents the membership function of \(x_i\) on a fuzzy subset \(M_i^{k}\). For the given input signal \(x_1=x_1^{*}, x_2=x_2^{*}, \cdots , x_n=x_n^{*}\), \(\mu _{M_i^{k}}\) can be blurred by selecting the corresponding membership function. Then, one can get the membership function \(\mu _k(x)\) for corresponding rule with max-min method as follows:
where 0 \(\le \mu _k(x) \le 1 \, \text {and} \, \mathop {\sum }\limits _{k=1}^{s}\mu _k(x)=1\).
Definition 5
(1) The consequent expression of the k-th local model of F:
(2) After fuzzification, fuzzy reasoning can be induced by disjunctive and conjunctive. Then, the ambiguity can be further solved with the weighted average method. As a result, the global model of F can be obtained as follows:
where structural matrices \(L^{\prime }={{\mathop {\sum }\limits _{k=1}^{s}}\mu _k(x)L_{\alpha s}}\) and \(\mathbb {L}^{\prime }={{\mathop {\sum }\limits _{k=1}^{s}}\mu _k(x)\overline{L}_{\alpha s}}\). Membership function \(\mu (x) = \mu _1(x) \vee \cdots \vee \mu _k(x) \vee \cdots \vee \mu _s (x)\).
Remark 3
Regions in fuzzy system consist of crisp region and fuzzy region. The fuzzy region refers to the region that satisfies \(0\le \mu _k(x)\le 1\), and the dynamics of the system are specified through a convex combination of several local linear models. Specifically, when all regions within a T-S fuzzy system are crisp regions, this means \(\mu _k(x)=1\) and all other membership functions are equal to zero. This leads to the degeneration of the global fuzzy model into a piecewise linear system.
Time delay with no noise
In this part, one investigates the stabilization of FABCNs with time delay. Especially, FABCNs with time delays are represented as \(F^*\) when time delays are not affected by noise. Similarity, the k-th local fuzzy system can be defined as \(F^{*}_k\).
With no noise, the Eq. (8) can be transformed into the following form:
and state feedback SDC can be expressed as
In Eqs. (14) and (15), \(G_s\in \mathcal {L}_{2^m\times 2^{n(\tau +1)}}\) and
Similarly, by substituting Eq. (16) into Eq. (15), one can obtain
where \(\overline{L}_s=(\hat{L}_sW_1^{\prime })^{h_k}\big (I_{2^{n(\tau +1)}} \otimes (\Phi _m^{h_k-1}G_s)\big )\Phi _{n(\tau +1)}\) and \(W_1^{\prime }=W_{[{2^{n(\tau +1)},2^m}]}\).
Lemma 2
\(\delta _\eta ^{\iota }\) is said to be the fixed point, if and only if the element in the \(\iota\)-th row and \(\iota\)-th column of the state transition matrix is 1.
Theorem 1
-
(1)
\(F^{*}_k\) is stabilized to \(z^{\prime }_d=\delta _{2^{n(\tau +1)}}^{r}\) with a state feedback SDC (16) iff the state transition matrix \(\overline{L}_s\) holds:
$$\begin{aligned}Col_r(\overline{L}_s) = \delta _{2^{n(\tau +1)}}^{r} \wedge { \overline{L}_s}^{k^{''}}= \delta _{2^{n(\tau +1)}}[r,r, \cdots , r]; \end{aligned}$$ -
(2)
\(F^{*}\) are globally stabilized to \(z^{\prime }_d=\delta _{2^{n(\tau +1)}}^{r}\) with a state feedback SDC (16) iff the state transition matrix \(\overline{L}\) holds:
$$\begin{aligned}Col_r(\overline{L}) = \delta _{2^{n(\tau +1)}}^{r} \wedge { \overline{L}}^{k^{\prime }}= \delta _{2^{n(\tau +1)}}[r,r, \cdots , r], \end{aligned}$$
where \(k^{''}, k^{\prime } \in [1,2^{n(\tau +1)}-1]\) and
Proof 1
(2) Sufficiency. Suppose that above conditions hold. According to \(Col_r(\overline{L}) = \delta _{2^{n(\tau +1)}}^{r}\) and Lemma 2, one can obtain that \(\delta _{2^{n(\tau +1)}}^{r}\) is the fixed point of \(F^{*}\). For any initial state \(z^{\prime }(0)\) = \(\delta _{2^{n(\tau +1)}}^{r_o} \ne \delta _{2^{n(\tau +1)}}^{r}\), if \(z{'}(1) = \overline{L}z{'}(0)\), then the sufficiency is proven. If \(z{'}(1) \ne \overline{L}z{'}(0)\), define \(z{'}(1) = \delta _{2^{n(\tau +1)}}^{r_1} \ne \delta _{2^{n(\tau +1)}}^{r}\) and go on the determination. If \(z{'}(2) = \overline{L}z{'}(1)\), then the sufficiency is proven. If \(z{'}(2) \ne \overline{L}z{'}(1)\), repeat above steps until \(t=k^{\prime }\), then one has
Because \(\overline{L}^{k^{\prime }}= \delta _{2^{n(\tau +1)}}[r,r, \cdots , r]\), one can further obtain \(z^{\prime }_d=\delta _{2^{n(\tau +1)}}^{r}\).
Necessity. Suppose that \(F^{*}\) are globally stabilized to \(z{'}_d=\delta _{2^{n(\tau +1)}}^{r}\). According to Lemma 2, one can obtain \(Col_r(\overline{L}) = \delta _{2^{n(\tau +1)}}^{r}\). Because the elements of \(\Delta _{2^{n(\tau +1)}}\) are finite, after \(k^{\prime }\) steps, one has following equations:
According to \(\overline{L}^{k^{\prime }} z^{\prime }(0)\) = \(Col_{r_0}(\overline{L}^{k^{\prime }})\), one can get \(Col_{r_0}(\overline{L}^{k^{\prime }})=\delta _{2^{n(\tau +1)}}^{r}\). Because the selection of \(z^{\prime }(0)\) is arbitrary, one can further obtain \(\overline{L}^{k^{\prime }}= \delta _{2^{n(\tau +1)}}[r,r, \cdots , r]\).
(1) Similarly. \(\square\)
Time delay with noise
The stabilization of F with time delay affected by noise is investigated in this section.
Theorem 2
-
(1)
\(F_k\) is stabilized to \(z_d=\delta _{2^{n(\tau +\gamma _{max}+1)}}^{r}\) with a state feedback SDC (9) iff the state transition matrix \(\overline{L}_{\alpha s}\) holds:
$$\begin{aligned}Col_r(\overline{L}_{\alpha s})=\delta _{2^{n(\tau +\gamma _{max}+1)}}^{r} \wedge ({ \overline{L}_{\alpha s}})^{k^{'''}}= \delta _{2^{n(\tau +\gamma _{max}+1)}}[r,r, \cdots , r]; \end{aligned}$$ -
(2)
F are globally stabilized to \(z_d=\delta _{2^{n(\tau +\gamma _{max}+1)}}^{r}\) with a state feedback SDC (9) iff the state transition matrix \(\mathbb {L}^{\prime }\) holds:
$$\begin{aligned}Col_r(\mathbb {L}^{\prime }) = \delta _{2^{n(\tau +\gamma _{max}+1)}}^{r} \wedge { \mathbb {L}^{\prime }}^{k}= \delta _{2^{n(\tau +\gamma _{max}+1)}}[r,r, \cdots , r], \end{aligned}$$
where \(k^{'''}, k \in [1,2^{n(\tau +\gamma _{max}+1)}-1]\) and
Proof 2
(2) Sufficiency. Suppose that above conditions hold. According to \(Col_r(\mathbb {L}^{\prime }) = \delta _{2^{n(\tau +\gamma _{max}+1)}}^{r}\) and Lemma 2, one can obtain that \(\delta _{2^{n(\tau +\gamma _{max}+1)}}^{r}\) is the fixed point of F. For any initial state z(0) = \(\delta _{2^{n(\tau +\gamma _{max}+1)}}^{r_o} \ne \delta _{2^{n(\tau +\gamma _{max}+1)}}^{r}\), if \(z(1) = \mathbb {L}^{\prime }z(0)\), then the sufficiency is proven. If \(z(1) \ne \mathbb {L}^{\prime }z(0)\), define \(z(1) = \delta _{2^{n(\tau +\gamma _{max}+1)}}^{r_1} \ne \delta _{2^{n(\tau +\gamma _{max}+1)}}^{r}\) and go on the determination. If \(z(2) = \mathbb {L}^{\prime }z(1)\), then the sufficiency is proven. If \(z(2) \ne \mathbb {L}^{\prime }z(1)\), repeat above steps until \(t=k\),
Because \({ \mathbb {L}^{\prime }}^{k}= \delta _{2^{n(\tau +\gamma _{max}+1)}}[r,r, \cdots , r]\), one can further obtain \(z_d=\delta _{2^{n(\tau +\gamma _{max}+1)}}^{r}\).
Necessity. Suppose that F are globally stabilized to \(z_d=\delta _{2^{n(\tau +\gamma _{max}+1)}}^{r}\). According to Lemma 2, one can obtain \(Col_r(\mathbb {L}^{\prime }) = \delta _{2^{n(\tau +\gamma _{max}+1)}}^{r}\). Because the elements of \(\Delta _{2^{n(\tau +\gamma _{max}+1)}}\) are finite, after k steps, one has following equations:
According to \({ \mathbb {L}^{\prime }}^{k}z(0)\) = \(Col_{r_0}({ \mathbb {L}^{\prime }}^{k})\), one can get \(Col_{r_0}({ \mathbb {L}^{\prime }}^{k})=\delta _{2^{n(\tau +\gamma _{max}+1)}}^{r}\). Because the selection of z(0) is arbitrary, one can further obtain \({ \mathbb {L}^{\prime }}^{k}= \delta _{2^{n(\tau +\gamma _{max}+1)}}[r,r, \cdots , r]\).
(1) Similarly. \(\square\)
Control Lyapunov function approach
Definition 6
31 A pseudo-Boolean function (PBF) is of the form \(V(z_1, z_2,\cdots ,z_{n(\tau +\gamma _{max}+1)}):D_{n(\tau +\gamma _{max}+1)} \rightarrow R\) or \(V(z) = M_{\vee } z:\Delta _{2^{n(\tau +\gamma _{max}+1)}} \rightarrow R\), where \(M_{\vee }\in R_{1\times n(\tau +\gamma _{max}+1)}\) is the structure matrix of V.
Definition 7
31 A PBF V is said to be a LF of the BN relative to S if
and
Define \(V(z) = M_{\vee }z = [c_1, c_2,\cdots , c_{2^{n(\tau +\gamma _{max}+1)}} ]z\), Eqs. (15) and (16) can be converted to inequalities
For any \(z=\delta _{2^{n(\tau +\gamma _{max}+1)}}^i \in \Delta _{2^{n(\tau +\gamma _{max}+1)}}\),
From above, it can be concluded that constructing a CLF is equivalent to solving the following linear programming problem:
Definition 8
32 A PBF V is said to be a CLF relative to S if
-
(1)
For any \(z \in S\), there exists a \(u_z\in \Delta _{2^m}\) such that \(V(Lu_zz)-V(z)=0\);
-
(2)
For any \(z \in \Delta _{2^{n(\tau +\gamma _{max}+1)}}\backslash S\), there exists a \(u_z\in \Delta _{2^m}\) such that \(V(Lu_zz)-V(z)>0\).
Proposition 1
33 Condition \(V(Lu_dz_d)-V(z_d)=0\) is equivalent to condition \(Lu_dz_d=z_d\).
Proof 3
Obviously, if condition \(V(Lu_dz_d)-V(z_d)=0\) is satisfied, then condition \(Lu_dz_d=z_d\) holds. Assume \(Lu_dz_d\ne z_d=y_1\) holds, then \(z(Lu_dz_d)-z(y_1)=0\). Besides that, there exists a controller \(u_1\) such that \(Lu_1y_1=y_2\), then \(z(Lu_1y_1)-z(y_2)=0\). Similarly, one has \(z(Lu_2y_2)-z(y_3)=0\), \(\cdots\), \(z(Lu_ny_n)-z(y_{n+1})=0\), where \(y_i\ne y_j\) and \(i,j\in Z_+\). This contradicts the fact that the system has only \(2^{n(\tau +\gamma _{max}+1)}\) states. Thus, the assumption is invalid. Then, one can obtain that the condition \(V(Lu_dz_d)-V(z_d)=0\) holds if the \(Lu_dz_d=z_d\) is satisfied. \(\square\)
Theorem 3
-
(1)
\(F_k\) in Eq. (12) is stabilized to S with a state feedback SDC (9) iff there exists a CLF V(z) relative to S;
-
(2)
The F (13) are stabilized to S with a state feedback SDC (9) iff there exists a CLF V(z) relative to S.
Proof 4
Sufficiency. Assume that there exists a CLF corresponding to the \(F_k\) in Eq. (12). Based on Definition 8, one has
-
(1)
For any \(z \in S\), there exists a \(u_z\in \Delta _{2^m}\) such that \(V(\overline{L}_{\alpha s}z)-V(z)=0\);
-
(2)
For any \(z \in \Delta _{2^{n(\tau +\gamma _{max}+1)}}\backslash S\), there exists a \(u_z\in \Delta _{2^m}\) such that \(V(\overline{L}_{\alpha s}z)-V(z)>0\).
For \(z_0\in S\), \(V(\overline{L}_{\alpha s}z_0)-V(z_0)=0\). According to Proposition 1, one can obtain \(\overline{L}_{\alpha s}z=z\), that means there exists a controller \(u_{\alpha s}\) such that \(z(t;z_0,u_{\alpha s})\in S\) for any integer \(t\ge 1\).
For \(z_0\notin S\), if there exists no positive integer \(t^{\prime }\) such that \(z(t;z_0,u_{\alpha s})\in S\) for any integer \(t=t^{\prime }\). Define \(\tau _1=\tau +\gamma _{max}+1\) and \(z(t;z_0,u_{\alpha s})=\delta _{2^{n\tau _1}}^{j_0}\), then \(z(t+1;z_0,u_{\alpha s})=\delta _{2^{n\tau _1}}^{j_1}\). Obviously, \(V(\delta _{2^{n\tau _1}}^{j_1})> V(\delta _{2^{n\tau _1}}^{j_0})\), then
where \(a\ne b\), \(j_a\ne j_b\) and \(j_a, j_b\in Z_+\). This contradicts the fact that the system has only \(2^{n\tau _1}\) states. Thus, the assumption is invalid. Hence, for sample point \(z_0\notin S\), there exists a positive integer \(t^{\prime }\) such that \(z(t;z_0,u_{\alpha s})\in S\) holds for any integer \(t\ge t^{\prime }\). In summarize, one can obtain that for any \(z_0\notin S\), there exists a sequence of controllers \(u_{\alpha s}\), such that \(z(t;z_0,u_{\alpha s})\in S\), \(\forall t \ge t^{\prime }\). Thus, system (12) is stabilized to S with the state feedback SDC (9).
Necessity. Assume that \(F_k\) in Eq. (12) is stabilized to S with a state feedback SDC (9). Define \(t_i\) as follows:
for any \(z_0=\delta _{2^{n\tau _1}}^{i}\in S\), it can be proved that \(V(z) = [c_1, c_2,\cdots , c_{2^{n\tau _1}} ]z\) is a CLF. \(c_i=-t_i\) and \(i=1,2,\cdots 2^{n\tau _1}\). On the one hand, for \(z\in S\), there exists \(u_z\) such that \(\overline{L}_{\alpha s}u_zz=z\), that means \(V(\overline{L}_{\alpha s}u_zz)-V(z)=0\). Thus, condition (1) of Definition 8 holds. On the other hand, for \(z=\delta _{2^{n\tau _1}}^{i}\notin S\) at time t, then \(z(t+1)=\overline{L}_{\alpha s}u_zz=\delta _{2^{n\tau _1}}^{j}\). Obviously, \(t_j<t_i\), then \(c_j>c_i\). Therefore, \(V(\overline{L}_{\alpha s}u_z\delta _{2^{n\tau _1}}^{i})-V(\delta _{2^{n\tau _1}}^{j})=c_j-c_i>0\). As a result, condition (2) of Definition 8 holds. In conclusion, \(V(z) = [c_1, c_2,\cdots , c_{2^{n\tau _1}} ]z\) is a CLF of \(F_k\) in Eq. (12). \(\square\)
Examples
Example 1
Consider the following \(F^{*}\) with time delay \(\tau =1\):
Given \(\big \{t_h:h\in \{1,2\}\big \}\) with \(h_1=1\) and \(h_2=2\). Then the sampling period sequence is \(\{1, 2, h_3, h_4, \cdots \}\), \(h_N \in \{1, 2\}\). By calculation, \(\varvec{a}(t-1)=\ltimes _{i=1}^{2}a_i(t-1)\), \(\varvec{z^{\prime }}(t)={a}(t-1){a}(t)\). By state feedback SDC Eq. (16), then
where \(\overline{L}_s=(\hat{L}_sW_1^{\prime })^{h_k}\big (I_{2^{n(\tau +1)}} \otimes (\Phi _m^{h_k-1}G_s)\big )\Phi _n \in \mathcal {L}_{16\times 16}\), \(W_1^{\prime }=W_{[{2^{4},2^1}]}\) and
For the rule 1, \({ \overline{L}_1}_{(1,1)}=1\), there is no \(k^{''}\) such that \({ \overline{L}_1}^{k^{''}} = \{\delta _{16}^{1}\}\). According to the condition (1) in Theorem 1, \(F^{*}_1\) will not be stabilized to \(\delta _{16}^{1}\).
For the rule 2, \({ \overline{L}_2}_{(1,1)}=1\) and there exists \(k^{''}=6\) such that \({ \overline{L}_2}^{6} = \{\delta _{16}^{1}\}\). According to the condition (1) in Theorem 1, \(F^{*}_2\) will be stabilized to \(\delta _{16}^{1}\).
For given \(\mu _1=0.1\) and \(\mu _2=0.9\), one has
By calculation, \(\overline{L}_{(1,1)} = 1\) and \(\overline{L}^{16} = \{\delta _{16}^{1}\}\). Therefore, according to condition (2) in Theorem 1, \(F^{*}\) are globally stabilized to \(\delta _{16}^{1}\). The state trajectory is shown as Figure 2.

The state trajectory diagram of \(a_1\) and \(a_2\).
Example 2
Consider the following F with time delay \(\tau =2\) influenced by noise \(\gamma\):
Define \(h_k \in \{1,2\}\) and \(\gamma \in \{\gamma _1, \gamma _2\}=\{-1,-2\}\). The noise varies with a period \(T=3\). Obviously, \(\gamma _{max}=max{\{\gamma _1, \gamma _2\}}=-1\) and \(z(t)={a}(t-1){a}(t)\). Then, one has
According to Eq. (10), then
where controller
and controller
For the rule 1, \({ \overline{L}_{11}}_{(64,64)}=1\), there is no \(k^{''}\) such that \({ \overline{L}_{11}}^{k^{''}} = \{\delta _{64}^{64}\}\). According to the condition (1) in Theorem 2, \(F_1\) will not be stabilized to \(\delta _{64}^{64}\).
For the rule 2, \({ \overline{L}_{22}}_{(64,64)}=1\), there is also no \(k^{''}\) such that \(({ \overline{L}_{22}})^{k^{''}} = \{\delta _{64}^{64}\}\). According to the condition (1) in Theorem 2, \(F_2\) will not be stabilized to \(\delta _{64}^{64}\).
For given \(\mu _1=0.7\) and \(\mu _2=0.3\), one has
and
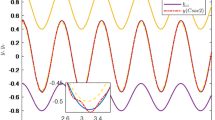
By calculation, \({\mathbb {L}^{\prime }}_{(64,64)} = 1\) and \({\mathbb {L}^{\prime }}^{64} = \{\delta _{64}^{64}\}\). Therefore, according to condition (2) in Theorem 2, F are globally stabilized to \(\delta _{64}^{64}\). The state trajectory is shown as Figure 3.

The state trajectory diagram of \(a_1\), \(a_2\) and \(a_3\).
Example 3
Consider the following F with time delay \(\tau =2\) influenced by noise \(\gamma\):
Define \(h_k \in \{1,2\}\) and \(\gamma \in \{\gamma _1, \gamma _2\}=\{-1,-2\}\). The noise varies with a period \(T=4\). Obviously, \(\gamma _{max}=max{\{\gamma _1, \gamma _2\}}=-1\) and \(z(t)={a}(t-1){a}(t)\). Then, one has
According to Eq. (10), one can get
For given \(\mu _1=0.5\) and \(\mu _2=0.5\), one has
For given stabilization set \(S = \{\delta _{16}^{4},\delta _{16}^{9},\delta _{16}^{12},\delta _{16}^{13},\delta _{16}^{14}\}\), one can define CLF \(V(z) = [c_1, c_2, \cdots , c_{16}]z\) and \(z \in \Delta _{16}\).
For the rule 1, according to inequalities (20), one can obtain
where \(V(z) = [1,\,1, \,0, \,2, \,0,\, 2, \,0, \,0,\,1,\,3,\,0,\,2,\,1,\,2,\,0,\,0]z\) is a feasible solution. From Theorem 3, \(F_1\) will be stabilized to the set S with controller
Similarly, for the rule 2, there also exists a feasible solution \(V(z) = [3,\,1, \,0, \,1, \,2,\, 1, \,0, \,0,\,2,\,1,\,0,\,2,\,2,\,2,\,0,\,0]z\) such that \(F_2\) will be stabilized to the set S with controller
And there exists a feasible solution \(V(z) = [4,\,1, \,0, \,1, \,2,\, 0, \,0, \,0,\,3,\,1,\,0,\,1,\,3,\,1,\,0,\,0]z\) such that F will be globally stabilized to the set S with controller \(G=0.5*G_{11}+0.5*G_{22}\). The state trajectory is shown as Figure 4.

The state trajectory diagram of \(a_1\) and \(a_2\)..
Conclusion
This paper has researched the stabilization of T-S Fuzzy ABCNs. By using the STP tool, the ABCNs is further extended with time-delay and expressed as an augmented system. Based on that, stabilizations of T-S Fuzzy ABCNs with fixed time delays and noise-influenced time delays are investigated, respectively. Besides that, two distinct approaches including the matrix method and the CLF method are utilized in the stability analysis of T-S Fuzzy ABCNs. Finally, some examples are provided to demonstrate the effectiveness and robustness of obtained results. The complexities, encompassing fuzziness, delays and noise, make main results practical and universal.
Data availability
The datasets generated during and/or analyzed during the current study are available from the corresponding author on reasonable request.
References
Kauffman, S. A. Metabolic stability and epigenesis in randomly constructed genetic nets. J. Theor. Biol. 22, 437–467 (1969).
Akutsu, T., Hayashida, M., Ching, W.-K. & Ng, M. K. Control of Boolean networks: Hardness results and algorithms for tree structured networks. J. Theor. Biol. 244, 670–679 (2007).
Harvey, I. & Bossomaier, T. Time out of joint: Attractors in asynchronous random Boolean networks. In Proceedings of the Fourth European Conference on Artificial Life. 67–75 (Citeseer, 1997).
Gershenson, C. Classification of random Boolean networks. In Artificial Life VIII, Proceedings of the Eighth International Conference on Artificial Life. 1–8 (2003).
Cheng, D., Qi, H. & Xue, A. A survey on semi-tensor product of matrices. J. Syst. Sci. Complex. 20, 304–322 (2007).
Meng, M. & Li, L. Stability and pinning stabilization of Markovian jump Boolean networks. IEEE Trans. Circuits Syst. II Exp. Briefs 69, 3565–3569 (2022).
Li, H., Yang, X. & Wang, S. Robustness for stability and stabilization of Boolean networks with stochastic function perturbations. IEEE Trans. Autom. Control 66, 1231–1237 (2020).
Gao, S., Xiang, C. & Lee, T. H. Set invariance and optimal set stabilization of Boolean control networks: A graphical approach. IEEE Trans. Control Netw. Syst. 8, 400–412 (2020).
Lin, L., Cao, J., Lu, J. & Rutkowski, L. Set stabilization of large-scale stochastic Boolean networks: A distributed control strategy. IEEE/CAA J. Autom. Sin. 11, 806–808 (2024).
Tong, L. & Liang, J. Fault detectability of asynchronous delayed Boolean control networks with sampled-data control. IEEE Trans. Netw. Sci. Eng. 11, 724–735 (2024).
Zhao, R., Wang, C., Yu, Y. & Feng, J.-E. Fault detectability of Boolean control networks via nonaugmented methods. Sci. China Inf. Sci. 66, 222205 (2023).
Wang, L., Wu, Z.-G., Huang, T., Chakrabarti, P. & Che, W.-W. Finite-time observability of Boolean networks with Markov jump parameters under mode-dependent pinning control. IEEE Trans. Syst. Man Cybern. Syst. 54, 245–254 (2024).
Huang, C., Wang, W., Lu, J. & Kurths, J. Asymptotic stability of Boolean networks with multiple missing data. IEEE Trans. Autom. Control 66, 6093–6099 (2021).
Liu, Y., Cao, J., Sun, L. & Lu, J. Sampled-data state feedback stabilization of Boolean control networks. Neural Comput. 28, 778–799 (2016).
Kong, X. & Li, H. Event-triggered control for sampled-data set stabilization of switched delayed Boolean control networks. Math. Methods Appl. Sci. 46, 2305–2318 (2023).
Lin, L., Zhong, J., Zhu, S. & Lu, J. Sampled-data general partial synchronization of Boolean control networks. J. Franklin Inst. 359, 1–11 (2022).
Sun, L., Ching, W.-K. & Lu, J. Stabilization of aperiodic sampled-data Boolean control networks: A delay approach. IEEE Trans. Autom. Control 66, 5606–5611 (2021).
Lu, J., Sun, L., Liu, Y., Ho, D. W. & Cao, J. Stabilization of Boolean control networks under aperiodic sampled-data control. SIAM J. Control Optim. 56, 4385–4404 (2018).
Yu, Y., Feng, J.-E., Wang, B. & Wang, P. Sampled-data controllability and stabilizability of Boolean control networks: Nonuniform sampling. J. Franklin Inst. 355, 5324–5335 (2018).
Kong, X., Li, H. & Gu, E. Lyapunov-based sampled-data set stabilisation of Boolean control networks with time delay and state constraint. Int. J. Control 97, 1027–1036 (2024).
Li, Y. & Wang, L. Controllability of Boolean control networks with multiple time delays in both states and controls. Front. Inf. Technol. Electron. Eng. 24, 906–915 (2023).
Anbuvithya, R., Sri, S. D., Vadivel, R., Gunasekaran, N. & Hammachukiattikul, P. Extended dissipativity and non-fragile synchronization for recurrent neural networks with multiple time-varying delays via sampled-data control. IEEE Access 9, 31454–31466 (2021).
He, Y. & Li, J. The observability of TS fuzzy Boolean control networks. In 2019 12th International Symposium on Computational Intelligence and Design (ISCID). Vol. 2. 3–6 (IEEE, 2019).
Zhao, J. & Yang, G.-H. Event-triggered-based adaptive fuzzy finite-time resilient output feedback control for mimo stochastic nonlinear system subject to deception attacks. In IEEE Transactions on Fuzzy Systems. 1–13 (2024).
Shan, Y., Xie, X., Sun, J. & Park, J. H. Observer-based adaptive event-triggered control for nonlinear networked systems under multiple cyber attacks. IEEE Trans. Fuzzy Syst. 32, 5272–5284 (2024).
Vadivel, R. & Joo, Y. H. Finite-time sampled-data fuzzy control for a non-linear system using passivity and passification approaches and its application. IET Control Theory Appl. 14, 1033–1045 (2020).
Vadivel, R., Sabarathinam, S., Wu, Y., Chaisena, K. & Gunasekaran, N. New results on T-S fuzzy sampled-data stabilization for switched chaotic systems with its applications. Chaos Solitons Fractals 164, 112741 (2022).
Bhagyaraj, T. et al. Fuzzy sampled-data stabilization of hidden oscillations in a memristor-based dynamical system. Int. J. Bifurc. Chaos 33, 2350130 (2023).
Wang, C., Yu, Y. & Feng, J.-E. Detectability of Boolean networks: A finite-time convergent matrix approach. J. Franklin Inst. 361, 1238–1254 (2024).
Su, C. & Pang, J. Target control of asynchronous Boolean networks. IEEE/ACM Trans. Comput. Biol. Bioinform. 20, 707–719 (2021).
Chen, B., Cao, J., Lu, G. & Rutkowski, L. Lyapunov functions for the set stability and the synchronization of Boolean control networks. IEEE Trans. Circuits Syst. II Exp. Briefs 67, 2537–2541 (2019).
Liu, J., Liu, Y., Guo, Y. & Gui, W. Sampled-data state-feedback stabilization of probabilistic Boolean control networks: A control Lyapunov function approach. IEEE Trans. Cybern. 50, 3928–3937 (2019).
Li, H. & Ding, X. A control Lyapunov function approach to feedback stabilization of logical control networks. SIAM J. Control Optim. 57, 810–831 (2019).
Acknowledgements
This work was supported in part by the National Natural Science Foundation of China (Nos: 61702356), Natural Science Foundation of ShanXi Province (Nos: 20210302124050), Shanxi Provincial Postgraduate Education Innovation Project (Nos: RC2400005598), Natural Science Foundation of Shandong Province (No: ZR2024QF012).
Author information
Authors and Affiliations
Contributions
Feifei Yang, Yujie Sun, Chuan Zhang and Xianghui Su wrote the main manuscript text and Hao Zhang prepared Fig. 1. All authors reviewed the manuscript.
Corresponding author
Ethics declarations
Competing interests
The authors declare no competing interests.
Additional information
Publisher’s note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution-NonCommercial-NoDerivatives 4.0 International License, which permits any non-commercial use, sharing, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if you modified the licensed material. You do not have permission under this licence to share adapted material derived from this article or parts of it. The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by-nc-nd/4.0/.
About this article

Cite this article
Yang, F., Sun, Y., Zhang, C. et al. Stabilization of T-S fuzzy asynchronous Boolean control networks with time delay under noise. Sci Rep 15, 15043 (2025). https://doi.org/10.1038/s41598-025-00189-x
Received:
Accepted:
Published:
Version of record:
DOI: https://doi.org/10.1038/s41598-025-00189-x
