
Abstract
This study investigates the qualitative behavior of mechanical oscillator equations with impulsive effects using the generalized Power Caputo fractional operator, encompassing several known derivatives (such as Caputo–Fabrizio and Atangana–Baleanu) as special cases. The operator’s parameter ‘p’ offers enhanced flexibility in modeling memory effects. Key findings, derived through integral equation formulations and fixed-point theory (including Banach’s contraction principle), establish rigorous conditions for the existence, uniqueness, and Ulam–Hyers stability of solutions under specific assumptions on the nonlinear and impulsive terms. The numerical scheme is developed by the Lagrange interpolation polynomial to obtain approximate solutions, and the analysis of symmetric cases connects the model to established fractional derivatives. This work offers a rigorous mathematical framework and numerical tools for analyzing systems, like mechanical oscillators, that exhibit both fractional-order memory and impulsive behavior, significantly enhancing modeling accuracy in engineering and control systems.
Similar content being viewed by others

Introduction
Fractional calculus has emerged as a powerful mathematical tool in recent years, offering significant advantages over traditional integer-order calculus for modeling and analyzing complex real-world phenomena1,2,3,4,5,6. By extending the principles of calculus to non-integer orders, fractional calculus provides a more nuanced framework for representing physical systems characterized by anomalous diffusion, long-term memory, and fractional-order dynamics. The versatility of fractional calculus has allowed scientists to deepen their understanding of complex systems, improve predictive capabilities, and improve design, control, and optimization strategies7,8,9,10,11.
Among the various fractional operators, the power Caputo fractional derivative, recently introduced by Ref.12, represents a novel and more general framework for fractional operators featuring non-singular kernels. This framework encompasses well-established concepts, each offering distinct advantages for specific physical scenarios. For instance, the Caputo-Fabrizio (CF) derivative13, known for its non-singular exponential kernel, is valuable for modeling systems with fading memory that decays exponentially, like certain heat transfer processes. The Atangana-Baleanu (AB) derivative14, employing a non-singular Mittag-Leffler kernel, excels at capturing more complex memory effects, including crossover behaviors observed in viscoelasticity and anomalous diffusion. Weighted versions, such as the weighted Atangana-Baleanu15 and the generalized weighted Hattaf derivatives16, incorporate weighting functions, allowing for the modeling of heterogeneous systems where memory properties vary spatially or temporally. The power Caputo operator, grounded in a generalized Mittag-Leffler function, not only unifies these diverse operators but also introduces a parameter ‘p’, offering enhanced flexibility in adjusting the memory decay characteristics to precisely match the system under study. This adaptability is crucial for developing accurate mathematical models that can better predict and explain complex behaviors, with applications ranging from disease modeling (impulses as vaccinations) to control systems (impulses as sudden control actions). While ’p’ adds complexity, it significantly refines the modeling capabilities.
Impulsive fractional differential equations are a powerful tool for modeling systems that exhibit both continuous evolution and sudden, abrupt changes17,18,19. These equations are essential in capturing real-world phenomena where smooth transitions are interrupted by external shocks or impulses. For instance, in pharmacology, they can model the sudden spike in drug concentration following a pill’s ingestion, while in engineering, they can represent systems subjected to sudden forces or failures. By incorporating memory and hereditary properties, fractional differential equations already provide a nuanced view of system behavior, and the addition of impulses allows for an even more accurate representation of systems with sudden changes.
However, the study of impulsive behavior in fractional differential equations remains a challenging area due to the inherent complexities of non-integer order derivatives and discontinuities. These factors complicate the analysis, solution methods, and the establishment of the existence, uniqueness, and stability of the solution. Previous research has made significant strides to address these challenges20,21,22,23,24,25. Despite these advancements, there remains a critical gap in the literature: the complexities associated with impulsive behavior in FDEs involving the generalized power fractional derivative have not yet been addressed.
This study aims to bridge this gap by exploring the criteria for the existence, uniqueness and stability of solutions for the following impulsive FDEs using the power fractional derivative
where
-
\(_{a}^{\mathbb {P-C}}\textbf{D}_{\left[ \eta \right] ,w}^{\sigma ,\mu ,p}\) is a Power-caputo fractional derivative of order \(\sigma \in \left( 0,1\right) ,\) with the power p and \(\min (\mu ,p)>0,\) w.r.t nondecreasing function \(w\left( \eta \right) .\)
-
\(\left[ \eta \right] =\eta _{k}\) if \(\eta \in \left( \eta _{k},\eta _{k+1}\right] ,k=0,1,\ldots ,m,\eta _{0}=a.\)
-
\(\mathbb {Y}:I\times \mathbb {R} \times \mathbb {R} \longrightarrow \mathbb {R}\) is a nonlinear continuous function satisfies some conditions described later in the hypotheses. This function represents the restoring force (e.g., nonlinear spring), damping force, and external forcing.
-
\(\mathbb {A}_{k}: \mathbb {R} \longrightarrow \mathbb {R} ,\) \(k=1,2,\ldots ,m,\) are functions satisfying conditions described later in the hypotheses.
-
\(\Delta \mathbb {V}\left( \eta _{k}\right)\) represents impulsive effects at points \(\eta _{k}\) such that \(a=\eta _{0}<\eta _{1}<\cdots<\eta _{k}<\eta _{k+1}=T,\) and \(\Delta \mathbb {V}\left( \eta _{k}\right) =\mathbb {V }(\eta _{k}^{+})-\mathbb {V}(\eta _{k}^{-})=\mathbb {V}(\eta _{k}^{+})-\mathbb { V}(\eta _{k}),\) \(\mathbb {V}(\eta _{k}^{+})=\lim _{h\rightarrow 0^{+}}\mathbb {V }(\eta _{k}+h),\) \(\mathbb {V}(\eta _{k}^{-})=\lim _{h\rightarrow 0^{-}}\mathbb { V}(\eta _{k}+h)\) represnt the right and left limits of \(\mathbb {V}(\eta )\) at \(\eta \in \left( \eta _{k},\eta _{k+1}\right] ,k=0,1,\ldots ,m\).
This model describes a mechanical oscillator subject to fractional damping and impulsive effects. The displacement \(\mathbb {V}(\eta )\) is governed by a fractional-order differential equation involving the Power-Caputo derivative, which accounts for the system’s memory effects. The external forces acting on the system are represented by the nonlinear function \(\mathbb {Y}\), which includes both exponentially decaying and sinusoidal components, modulated by the system’s displacement. Impulsive effects at specific times \(\eta _{k},k=0,1,2,\ldots ,m\) introduce sudden changes in displacement, proportional to the current displacement and scaled by exponential functions of time.
A key feature of model (1.1) is its generality. By selecting specific values for the parameters \(\sigma ,\mu ,p,\) and the weighting function \(w(\eta )\) , the power Caputo operator reduces to several well-known fractional derivatives, making (1.1) a unifying framework. These symmetric cases include:
-
If \(p=e\), the model (1.1) reduced to the following weighted generalized Hattaf fractional model.
$$\begin{aligned} \left\{ \begin{array}{l} _{a}^{\mathbb {P-C}}\textbf{D}_{\left[ \eta \right] ,w}^{\sigma ,\mu ,e} \mathbb {V}(\eta )=\mathbb {Y}\left( \eta ,\mathbb {V}\left( \eta \right) ,_{a}^{\mathbb {P-C}}\textbf{D}_{\left[ \eta \right] ,w}^{\sigma ,\mu ,e} \mathbb {V}(\eta )\right) ,\eta \in \mathcal {I}_{c}=\mathcal {I}-\left\{ \eta _{1},\eta _{2},\ldots ,\eta _{m}\right\} ,\mathcal {I}:=\left[ a,T\right] \\ \Delta \mathbb {V}\left( \eta _{k}\right) =\mathbb {V}(\eta _{k}^{+})-\mathbb {V }(\eta _{k}^{-})=\mathbb {A}_{k}\mathbb {V}(\eta _{k}),k=1,\ldots ,m, \\ \mathbb {V}(a)=\mathbb {V}_{a}. \end{array} \right. \end{aligned}$$(1.2) -
If \(\mu =\sigma\), \(p=e\) and \(w\left( \eta \right) =1,\) the model (1.1) reduced to the following Atangana–Baleanu fractional model.
$$\begin{aligned} \left\{ \begin{array}{l} _{a}^{\mathbb {P-C}}\textbf{D}_{\left[ \eta \right] ,1}^{\sigma ,e} \mathbb {V}(\eta )=\mathbb {Y}\left( \eta ,\mathbb {V}\left( \eta \right) ,_{a}^{\mathbb {P-C}}\textbf{D}_{\left[ \eta \right] ,1}^{\sigma ,e} \mathbb {V}(\eta )\right) ,\eta \in \mathcal {I}_{c}=\mathcal {I}-\left\{ \eta _{1},\eta _{2},\ldots ,\eta _{m}\right\} ,\mathcal {I}:=\left[ a,T\right] \\ \Delta \mathbb {V}\left( \eta _{k}\right) =\mathbb {V}(\eta _{k}^{+})-\mathbb {V }(\eta _{k}^{-})=\mathbb {A}_{k}\mathbb {V}(\eta _{k}),k=1,\ldots ,m, \\ \mathbb {V}(a)=\mathbb {V}_{a}. \end{array} \right. \end{aligned}$$(1.3)This model is widely applied in complex systems modeling due to its Mittag–Leffler kernel. See Ref.30.
-
If \(\mu =\sigma\), \(p=e,\) the model (1.1) reduced to the following weighted Atangana–Baleanu fractional model.
$$\begin{aligned} \left\{ \begin{array}{l} _{a}^{\mathbb {P-C}}\textbf{D}_{\left[ \eta \right] ,w}^{\sigma ,e} \mathbb {V}(\eta )=\mathbb {Y}\left( \eta ,\mathbb {V}\left( \eta \right) ,_{a}^{\mathbb {P-C}}\textbf{D}_{\left[ \eta \right] ,w}^{\sigma ,e} \mathbb {V}(\eta )\right) ,\eta \in \mathcal {I}_{c}=\mathcal {I}-\left\{ \eta _{1},\eta _{2},\ldots ,\eta _{m}\right\} ,\mathcal {I}:=\left[ a,T\right] \\ \Delta \mathbb {V}\left( \eta _{k}\right) =\mathbb {V}(\eta _{k}^{+})-\mathbb {V }(\eta _{k}^{-})=\mathbb {A}_{k}\mathbb {V}(\eta _{k}),k=1,\ldots ,m, \\ \mathbb {V}(a)=\mathbb {V}_{a}. \end{array} \right. \end{aligned}$$(1.4)This type (weighted Atangana–Baleanu) is suitable for heterogeneous systems with AB-type memory. For more information about weighted fractional operator, we refer to31.
-
If \(\mu =1,\) \(p=e\) and \(w\left( \eta \right) =1,\) the model (1.1) reduced to the following Caputo–Fabrizio fractional model.
$$\begin{aligned} \left\{ \begin{array}{l} _{a}^{\mathbb {P-C}}\textbf{D}_{\left[ \eta \right] ,1}^{\sigma ,1 ,e} \mathbb {V}(\eta )=\mathbb {Y}\left( \eta ,\mathbb {V}\left( \eta \right) ,_{a}^{\mathbb {P-C}}\textbf{D}_{\left[ \eta \right] ,1}^{\sigma ,1 ,e} \mathbb {V}(\eta )\right) ,\eta \in \mathcal {I}_{c}=\mathcal {I}-\left\{ \eta _{1},\eta _{2},\ldots ,\eta _{m}\right\} ,\mathcal {I}:=\left[ a,T\right] \\ \Delta \mathbb {V}\left( \eta _{k}\right) =\mathbb {V}(\eta _{k}^{+})-\mathbb {V }(\eta _{k}^{-})=\mathbb {A}_{k}\mathbb {V}(\eta _{k}),k=1,\ldots ,m, \\ \mathbb {V}(a)=\mathbb {V}_{a}. \end{array} \right. \end{aligned}$$(1.5)This model is recognized for its non-singular exponential kernel, which is useful in diffusion and relaxation processes.
This study represents a significant advancement by being the first to explore impulsive behavior in FDEs using the power caputo fractional derivative, thereby expanding the toolkit available for scientists and engineers to model complex systems more accurately. Also, the analysis of impulsive FDEs presents challenges due to the complexities of non-integer order derivatives and discontinuities, necessitating novel approaches to establish solution existence, uniqueness, and stability. By addressing this gap, the research enhances the modeling accuracy and predictive capabilities in various fields.
The remainder of this paper is structured to systematically develop and validate our approach. “Basic concepts” section establishes the foundational definitions and lemmas related to the power Caputo operator. “Primary findings” section constitutes the core theoretical contribution, where we transform the impulsive FDE into an equivalent integral equation and employ fixed-point theorems to rigorously prove the existence, uniqueness, and Ulam-Hyers stability of solutions. “Numerical scheme” section details the construction of a numerical scheme for approximating solutions, demonstrating practical applicability. “An application with simulation results” section provides illustrative examples and simulations, including explorations of the significant symmetric cases, thereby showcasing the versatility and unifying nature of the power Caputo framework for modeling impulsive systems with diverse memory characteristics. Finally, concluding remarks summarize the key findings and potential avenues for future research.
Basic concepts
Definition 1
12Let \(\sigma \in \left[ 0,1\right) ,\) with \(\min (\mu ,p)>0,\) and \(\mathbb {V}\in H^{1}\left( a,b\right) ,\) where \(H^{1}\left( a,b\right)\) is Sobolev space. The power caputo fractional derivative of order \(\sigma\), of a function \(\mathbb {V}\) with respect to the weight function w, \(0<w\in C^{1}\left( \left[ a,b\right] \right)\), is defined by
where
-
\(^{p}\mathbb {E}_{\mu ,1}\) represents the PML function given by
$$\begin{aligned} ^{p}\mathbb {E}_{\mu ,l}\left( s\right) =\sum _{n=0}^{+\infty }\frac{\left( s\ln p\right) ^{n}}{\Gamma \left( kn+l\right) },s\in \mathbb {C} , \text{ and } k,l,p>0. \end{aligned}$$ -
\(\mathbb {P}(\sigma )\) represents a normalization positive function obeying \(\mathbb {P}(0)=\mathbb {P} (1)=1.\)
According to Theorem 1 of12, the PML function \(^{p}\mathbb {E}_{\mu ,l}\left( s\right)\) is locally uniformly convergent for any \(s\in \mathbb {C} .\)
This definition provides a generalized way to measure the rate of change of a function \(\mathbb {V}\) considering its past history, weighted by the function w and characterized by the parameters \(\sigma\), \(\mu\), p. The power Mittag–Leffler (PML) function \(^{p}\mathbb {E}_{\mu ,1}\) acts as a non-singular kernel, enabling the modeling of complex memory effects, while the weighting function w allows for incorporating system heterogeneities. The parameter p adds further flexibility in tuning the memory characteristics. Its importance lies in unifying various fractional operators and offering enhanced modeling capabilities for complex systems.
Remark 1
The power Caputo fractional derivative, as presented in Definition 1, serves as a generalization of numerous fractional derivatives found in the literature, as follows:
(1) If \(w(\eta )=1,p=e,\sigma =\mu .\) The, Definition 1 reduce to the Atangana–Baleanu fractional derivative given by
(2) If \(w(\eta )=1,p=e,\mu =1.\) The, Definition 1 reduce to the Caputo–Fabrizio fractional derivative given by
(3) If \(p=e,\sigma =\mu .\) The, Definition 1 reduce to the weighted Atangana–Baleanu fractional derivative given by
(4) If \(p=e.\) The, Definition 1 reduce to the weighted generalized Hattaf fractional derivative given by
This Remark highlights a crucial aspect of the power Caputo fractional derivative: its ability to encapsulate several established fractional operators as specific instances.
This unification is significant because it positions the power Caputo operator as a comprehensive tool. Results obtained for this general operator can potentially be specialized to these well-known cases, streamlining analysis and allowing for comparisons across different fractional modeling approaches. It underscores the operator’s flexibility and its foundation in existing fractional calculus concepts.
Definition 2
12 Let \(\sigma \in \left[ 0,1\right) ,\) with \(\min (\mu ,p)>0.\) The power caputo fractional integral of order \(\sigma\), of a function \(\mathbb {V}\) with respect to the weight function w, \(0<w\in C^{1}\left( \left[ a,b\right] \right)\), is defined by
-
\(^{\mathbb{R}\mathbb{L}}\textbf{I}_{a,w}^{\mu }\mathbb {V}(\eta )\) denotes the standard weighted Riemann–Liouville fractional integral of order \(\mu\) given by
$$\begin{aligned} ^{\mathbb{R}\mathbb{L}}\textbf{I}_{a,w}^{\mu }\mathbb {V}(\eta )=\frac{1}{\Gamma (\mu ) }\frac{1}{w\left( \eta \right) }\int _{a}^{\eta }\left( \eta -s\right) ^{\mu -1}\left( w\mathbb {V}\right) \left( s\right) ds. \end{aligned}$$
This definition is fundamental for reformulating fractional differential equations into equivalent Volterra-type integral equations. This transformation is a cornerstone of the analytical methods used later in this paper, particularly for applying fixed-point theorems.
Theorem 1
(Theorem 126) Let \(\sigma \in \left[ 0,1\right) ,\) with \(\mu ,p>0,\) and \(\mathbb {V}\in H^{1}\left( a,b\right) .\) Then, the PFD and PFI are commutative operators as follows:
-
(i)
\(_{a}^{\mathbb {P}-\mathbb {C}}\textbf{D}_{\eta ,w}^{\sigma ,\mu ,p}\left( _{a}^{\mathbb {P}-\mathbb {C}}\textbf{I}_{\eta ,w}^{\sigma ,\mu ,p} \mathbb {V}\right) (\eta )=\mathbb {V}(\eta )-\frac{w\mathbb {V}\left( a\right) }{w(\eta )};\)
-
(ii)
\(_{a}^{\mathbb {P}-\mathbb {C}}\textbf{I}_{\eta ,w}^{\sigma ,\mu ,p}\left( _{a}^{\mathbb {P}-\mathbb {C}}\textbf{D}_{\eta ,w}^{\sigma ,\mu ,p} \mathbb {V}\right) (\eta )=\mathbb {V}(\eta )-\frac{w\mathbb {V}\left( a\right) }{w(\eta )};\)
-
(iii)
\(_{a}^{\mathbb {P}-\mathbb {C}}\textbf{D}_{\eta ,1}^{\sigma ,\mu ,p} \mathbb {V}(\eta )=0,\) for all constant function \(\mathbb {V}(\eta ).\)
These properties establish the fundamental relationship between the power Caputo derivative and its corresponding integral and are essential for analytical manipulations.
If we put \(p=e\), then we obtain the results of generalized Hattaf fractional operators27.
Lemma 2.1
The PFD and PFI satisfy the Newton–Leibniz formula
This lemma provides the power Caputo analogue of the Newton–Leibniz formula, directly linking the function’s values at the endpoints via its fractional derivative and integral, which is crucial for solving initial value problems.
Lemma 2.2
26 Let \(\mathbb {K}:\left[ 0,1\right] \times \mathbb {R} \rightarrow \mathbb {R}\) be a continuous nonlinear function such that \(\mathbb {K}\left( a,\mathbb {V }\left( a\right) \right) =0.\) Then, the function \(\mathbb {V}\in C\left( \left[ a,b\right] \right)\) is a solution of the following problem
if and only if \(\mathbb {V}\) satisfies the following integral equation
This lemma establishes the equivalence between the initial value problem involving the power Caputo derivative and a Volterra integral equation. This equivalence is the foundation for applying fixed-point theorems to prove the existence and uniqueness of solutions, transforming the differential problem into finding a fixed point of an integral operator.
Definition 3
28Assume \(\mathbb {G}:\mathcal {N}\subset \mathbb {Q}\rightarrow \mathbb {Q}\) is a continuous and bounded operator. Then, if
for all \(u,\widehat{u}\in \mathcal {N}\). Then, the operator \(\mathbb {G}\) is Lipschitz with a specific constant \(\Upsilon\). Furthermore, if \(\Upsilon <1\) , the operator \(\mathbb {G}\) is classified as a strict contraction.
These concepts are crucial for applying fixed-point theorems. Lipschitz continuity provides a bound on how much the operator stretches distances between points, while a strict contraction (Lipschitz constant) ensures the operator shrinks distances, guaranteeing a unique fixed point via the Banach Contraction Principle.
Hypothesis
In our analysis of existence, uniqueness, and stability, we adopt the following assumptions.
(H\(_{1}\)) The function \(\mathbb {Y}:I\times \mathbb {R} \times \mathbb {R} \rightarrow \mathbb {R}\) is continuous, and there exist positive constants \(\varrho _{f}\) and \(\varrho _{f}^{\prime },\) such that for each \(\mathbb {V},\widehat{\mathbb {V}} \in \mathbb {R}\), the following inequality holds:
(H\(_{2}\)) For \(k=0,1,\ldots ,m,\) the functions \(\mathbb {A}_{k}: \mathbb {R} \rightarrow \mathbb {R}\) are continuous, and there exist a positive constant \(L_{\mathbb {A}},\) such that
Primary findings
In this section, we present the key achievements of our research, highlighting the significant outcomes and discoveries that have been made. These findings are central to our study and provide a comprehensive understanding of the topic at hand. To analyze the impulsive fractional differential equation (1.1), we convert it to equivalent integral equations. This conversion is advantageous because integral operators often behave better than differential operators, especially when dealing with discontinuities introduced by impulses, and it directly sets the stage for applying fixed-point theorems. The following theorem formally establishes this equivalence.
Equivalent integral formulation of problem (1.1)
In this subsection, we convert the problem (1.1) into an equivalent integral formulation. This conversion offers a versatile and powerful approach to solving complex problems, providing advantages in solvability, boundary condition handling, numerical methods, physical interpretation, and theoretical analysis. Define the piecewise space \(\mathcal{P}\mathcal{C}\left( \mathcal {I}\right)\) as follows
with the norm
Theorem 2
Let \(\sigma \in \left( 0,1\right) ,\) \(\min \left( \mu ,p\right) >0,\) and \(\ \varphi :\mathcal {I}^{\prime }\rightarrow \mathbb {R}\) be a continuous functions. Then \(\mathbb {V}\in \mathcal{P}\mathcal{C}\left( I\right)\) satisfies
if and only if \(\mathbb {V}\) satisfy the following integral equations
Proof
First, let \(\mathbb {V}\in \mathcal{P}\mathcal{C}^{\mathfrak {\gamma }}\left( I\right)\) be a solution of model (3.1). We prove that \(\mathbb {V}\) is a solution of (3.2). If \(\eta \in \left[ a,\eta _{1}\right] ,\) then \(^{\mathbb {P-C}} \textbf{D}_{\left[ \eta \right] ,w}^{\sigma ,\mu ,p}\mathbb {V}(\eta )=\varphi (\eta ),\) \(\left[ \eta \right] =a.\) Taking the operator \(_{a}^{ \mathbb {P}-\mathbb {C}}\textbf{I}_{\eta ,w}^{\sigma ,\mu ,p}\) on both sides of first equation (3.1) with using Definition 2 and Theorem 1, we have
By condition \(\mathbb {V}(a)=\mathbb {V}_{a},\) we have
This means that
By \(\left( \mathbb {V}(\eta _{1}^{-})=\mathbb {V}(\eta _{1}^{+})-\mathbb {A}_{1} \mathbb {V}(\eta _{1}^{-})\right) ,\) we get
If \(\eta \in \left( \eta _{1},\eta _{2}\right] ,\) then \(^{\mathbb {P-C}} \textbf{D}_{\left[ \eta \right] ,w}^{\sigma ,\mu ,p}\mathbb {V}(\eta )=\varphi (\eta ),\left[ \eta \right] =\eta _{1}.\) Thus, by taking the operator \(^{\mathbb {P}-\mathbb {C}}\textbf{I}_{\eta _{1},w}^{\sigma ,\mu ,p}\) on both sides, we get
Thus, by (3.4) and (3.5), we have
This means that
By condition \(\left( \mathbb {V}(\eta _{2}^{-})=\mathbb {V}(\eta _{2}^{+})- \mathbb {A}_{2}\mathbb {V}(\eta _{2}^{-})\right) ,\) we get
If \(\eta \in \left( \eta _{2},\eta _{3}\right] ,\) then \(^{\mathbb {P-C}} \textbf{D}_{\left[ \eta \right] ,w}^{\sigma ,\mu ,p}\mathbb {V}(\eta )=\varphi (\eta ),\) \(\left[ \eta \right] =\eta _{2}.\) Thus, by taking the operator \(^{\mathbb {P}-\mathbb {C}}\textbf{I}_{\eta _{2},w}^{\sigma ,\mu ,p}\) on both sides, we get
Thus, by (3.6) and (3.7), we have
This means that
After impulse \(\left( \mathbb {V}(\eta _{3}^{-})=\mathbb {V}(\eta _{3}^{+})- \mathbb {A}_{3}\mathbb {V}(\eta _{3}^{-})\right) ,\) we get
Assume that
Then, inductively, for \(\eta \in \left( \eta _{k},\eta _{k+1}\right] ,\) then \(^{\mathbb {P-C}}\textbf{D}_{\left[ \eta \right] ,w}^{\sigma ,\mu ,p}\mathbb {V }(\eta )=\varphi (\eta ),\) \(\left[ \eta \right] =\eta _{k}.\) Thus, by taking the operator \(^{\mathbb {P}-\mathbb {C}}\textbf{I}_{\eta _{k},w}^{\sigma ,\mu ,p}\) on both sides, we get
Thus, by (3.9) and (3.10), we get
Thus (3.2) is satisfied. Conversely, assume that \(\mathbb {V}\) satisfies the Eq. (3.2). If \(\eta \in \left[ a,\eta _{1}\right] .\) Replace \(\eta\) by a in (3.2), then, we get \(\mathbb {V}(a)=\mathbb {V}_{a}.\) On the other hand, applying \(^{\mathbb {P}-\mathbb {C}}\textbf{D}_{a,w}^{\sigma ,\mu ,p}\) on both sides of (3.2), and using Theorem 1, we get
For \(\eta \in \left( \eta _{k},\eta _{k+1}\right] .\) By the same technique of case \(\eta \in \left[ a,\eta _{1}\right]\), we can easily prove case \(\eta \in \left( \eta _{k},\eta _{k+1}\right] .\) \(\square\)
Theorem 3
Let \(\sigma \in \left( 0,1\right) ,\) \(\min \left( \mu ,p\right) >0,\) and let \(\ \mathbb {Y}:J\times \mathbb {R} \times \mathbb {R} \rightarrow \mathbb {R}\) be a continuous function. If \(\mathbb {V}\in \mathcal{P}\mathcal{C}\left( J\right)\) satisfies the model (1.1), then, in the light of Theorm 2, \(\mathbb {V}\) satisfies the following integral equations
Consider the continuous operator \(\Xi :\mathcal{P}\mathcal{C}\left( J\right) \rightarrow \mathcal{P}\mathcal{C}\left( J\right)\) defined by
We noted that the fixed points of the operator \(\Xi\) is a solutions of model (1.1).
Criteria required for existence of solution
In this subsection, we derive sufficient conditions that ensure the existence of a solution to model (1.1). Having established the equivalent integral formulation. We will use arguments based on Schaefer’s fixed-point theorem (demonstrating operator continuity and compactness via the Arzelá–Ascoli theorem, along with boundedness) to show that such a fixed point exists under certain conditions on the system parameters and nonlinearities. See Refs.34,35.
Theorem 4
Assume that (H\(_{1}\)) and (H\(_{2}\)) hold. If \(\left( Q_{1}\varrho _{\mathbb {Y}}+\frac{m\left| w\left( T\right) \right| }{ w^{*}}L_{\mathbb {A}}\right) <1,\) where
then the model (1.1) possess at least one solution.
Proof
To apply fixed point approach, we define a closed ball set \(\mathbb {M}_{R}\) as follows
with radius R such that
where \(\mathcal {O}_{\mathbb {Y}}=\max _{\eta \in \mathcal {I}}\left| \mathbb {Y}\left( \eta ,0,0\right) \right| .\) The goal is to establish that the operator \(\Xi\) as specified in (3.12), contains a fixed point. To accomplish this, the proof is organized into the following steps.
Step 1 \(\Xi (\mathbb {M}_{R})\subset \mathbb {M}_{R}.\) For any \(\mathbb {V}\in \mathbb {M}_{R},\) we have
For \(i=1,2,\ldots ,k,k+1,\) with the fact \(^{\mathbb {P-C}}\textbf{D}_{\eta _{i-1},w}^{\sigma ,\mu ,p}\mathbb {V}(\eta )=\mathbb {Y}\left( \eta ,\mathbb {V} \left( \eta \right) ,^{\mathbb {P-C}}\textbf{D}_{\eta _{i-1},w}^{\sigma ,\mu ,p}\mathbb {V}(\eta )\right)\) and by (H\(_{1}\)), we have
Therefore we get
Thus, we have
Hence, by (3.13) and (3.14), we have
This implies that
This means that \(\Xi (\mathbb {M}_{R})\subset \mathbb {M}_{R}.\)
Step 2 In this step, we prove that \(\Xi\) is a continuous and compact. Let \(\mathbb {V}_{n}\) be a sequence in \(\mathbb {M}_{R},\) such that \(\mathbb {V}_{n}\rightarrow \mathbb { V}\) in \(\mathbb {M}_{R}.\) Let
This means that
By (H\(_{1}\)), we have
This implies that
Thus, we have
Hence, by (3.14) and (3.15), we obtain
Then, we have
This implies that
Hence, \(\Xi\) is continuous. Also, \(\Xi\) is bounded by R on \(\mathbb {M} _{R}\). This implies that \(\Xi\) is uniformly bounded on \(\mathbb {M}_{R}\). Next, we prove that \(\Xi\) is equicontinuous. Let \(\eta _{1},\eta _{2}\in J\) such that \(\eta _{1}<\eta _{2}.\) In view of (H\(_{2}\)) we fix
Then, we have
Take \(\eta _{2}\rightarrow \eta _{1}\), then from (3.16), we have
Hence, \(\Xi\) exhibits equicontinuity, we can invoke the Arzelá–Ascoli theorem to deduce that \(\Xi\) maps \(\mathbb {M}_{R}\) into a compact subset of itself. Consequently, \(\Xi\) is a completely continuous operator.
Step 3 In this step, we prove that the set \(\digamma =\left\{ \mathbb {V}\in \mathbb {M}_{R}: \mathbb {V}=\xi \Xi \left( \mathbb {V}\right) ,\,\xi \in \left( 0,1\right) \right\}\) is bounded. Let \(\mathbb {V}\in \digamma .\) Then, we have
In view of first step, we have
This implies that
Consequently, \(\digamma\) is bounded, and by the prior steps, we deduce that the operator \(\Xi\) has at least one fixed point. Therefore, the model (1.1) has at least one solution. \(\square\)
Criteria required for uniqueness of solution
While Theorem 4 guarantees that our model (1.1) possesses at least one solution under the given conditions, for many practical applications, particularly in prediction and control, it is crucial to know if this solution is the only one. Uniqueness ensures that the system’s behavior is deterministic and predictable, given the initial state and parameters. Without uniqueness, different simulations starting from the same point could yield different outcomes, undermining the model’s reliability. Therefore, we now investigate stricter conditions under which the solution is unique. The primary tool for establishing uniqueness in this context is the Banach Contraction Principle.
Theorem 5
Assume that (H\(_{1}\)) and (H\(_{2}\)) hold. If
where
then, the problem (1.1) has a unique solution.
Proof
In this theorem, we consider \(\mathbb {M}_{R}\) which defined in Theorem 4. By the first step in Theorem 4, we have \(\Xi (\mathbb {B} _{R})\subset \mathbb {M}_{R}.\) Now, we need only prove that the operator \(\Xi\) is contraction map by using Banach contraction principle. Let \(\mathbb {V},\widehat{\mathbb {V}}\in \mathbb {B}_{R}\) and \(\eta \in \mathcal {I}\). Then, we obtain
Since \(\left( Q_{1}\varrho _{\mathbb {Y}}+\frac{m\left| w\left( T\right) \right| }{w^{*}}L_{\mathbb {A}}\right) <1,\) this implies that \(\Xi\) is a contraction operator. Thus, the system (1.1) has a unique solution. \(\square\)
Stability behavior
Beyond existence and uniqueness, understanding how solutions behave under small perturbations or inaccuracies is critical for practical robustness. This leads to the concept of stability, specifically Ulam–Hyers (UH) stability. The core idea is to demonstrate that if a function approximately satisfies the differential equation (within a certain error \(\epsilon\)), then it must be close to an actual exact solution of the equation. Establishing UH stability provides confidence that numerical approximations or small modeling errors will not lead to drastically different outcomes. Our approach will involve relating the approximate solution (satisfying inequality (3.19)) to the integral equation framework and utilizing the bounds derived previously. Before presenting the stability analysis theorem, we introduce the necessary definitions29,32,33. Let \(\epsilon > 0\) and \(\lambda _{\phi }: J \rightarrow \left[ 0, \infty \right)\) be a continuous function. We then consider the following inequalities.
Definition 4
The model (1.1) is Ulam–Hyers stable if there exists a positive constant \(\mathcal {M}\), such that for any \(\epsilon >0\), there is a piecewise continuous function \(\widehat{\mathbb {V}}\) that satisfies the inequality (3.19) related to problem (1.1). Furthermore, for the exact solution \(\mathbb {V}\) of the problem (1.1), the following inequality holds:
Remark 2
A function \(\widehat{\mathbb {V}}\in \mathcal{P}\mathcal{C}\left( J\right)\) is satisfies the inequalities (3.19)) if and only if there exist a functions \(\mathbb {Q}\in \mathcal{P}\mathcal{C}\left( J\right)\) such that
(i) \(\left| \mathbb {Q}(\eta )\right| \le \epsilon ;\)
(ii) \(\left\{ \begin{array}{l} _{a}^{\mathbb {P-C}}\textbf{D}_{\left[ \eta \right] ,w}^{\sigma ,\mu ,p} \widehat{\mathbb {V}}(\eta )=\mathbb {Y}\left( \eta ,\widehat{\mathbb {V}} \left( \eta \right) ,_{a}^{\mathbb {P-C}}\textbf{D}_{\left[ \eta \right] ,w}^{\sigma ,\mu ,p}\widehat{\mathbb {V}}(\eta )\right) +\mathbb {Q}(\eta ), \\ \Delta \widehat{\mathbb {V}}\left( \eta _{k}\right) =\widehat{\mathbb {V}} (\eta _{k}^{+})-\widehat{\mathbb {V}}(\eta _{k}^{-})=I_{k}\widehat{\mathbb {V}} (\eta _{k}),k=1,\ldots ,m, \\ \widehat{\mathbb {V}}(a)=\mathbb {V}_{a}, \end{array} \right. ,\,\eta \in J\)
Lemma 3.1
Let \(\sigma \in \left( 0,1\right) ,\) \(\min \left( \mu ,p\right) >0.\) If a function \(\widehat{\mathbb {V}}\in \mathcal{P}\mathcal{C}\left( J\right)\) satisfies the inequalities (3.19)), then \(\widehat{\mathbb {V}}\) satisfies the following integral inequalities
where
and
Proof
By second part in Remark 2, we have
Then, by Theorem 3, the solution of (3.21) is given by
For \(\eta \in \left[ a,\eta _{1}\right] ,\) we have
For \(\eta \in \left( \eta _{k},\eta _{k+1}\right]\), we have
This implies that
\(\square\)
In the following theorem, we establish that the problem (1.1) demonstrates stable behavior.
Theorem 6
Assume that \((H_{1})\) and \((H_{2})\) hold. Then
is Ulam Hyers stable, provided that
Proof
Let \(\epsilon > 0\) and \(\widehat{\mathbb {V}}\in \mathcal{P}\mathcal{C}\left( J\right)\) be satisfies the inequalities (3.19)) and let \(\mathbb {V}\in \mathcal{P}\mathcal{C}\left( J\right)\) be the unique solution of the following system
Then, by by Theorem 3, we have
Since
We can easily prove that \(\mathcal {A}_{\mathbb {V}}=\mathcal {A}_{\widehat{ \mathbb {V}}}\). Hence, from (H\(_{2}\)) and Lemma 3.1, for each \(\eta \in J,\) we have
Thus, by (H\(_{1}\)), we have
It follows that
where \(\mathcal {M=}\frac{K}{1-\left( Q_{1}\varrho _{\mathbb {Y}}+\frac{ m\left| w\left( T\right) \right| }{w^{*}}L_{\mathbb {A}}\right) }\). By utilizing inequality (3.24) and the definition of Ulam–Hyers stability 4, we conclude that the solution to problem (1.1) exhibits Ulam–Hyers stability. Moreover, by choosing \(\lambda _{\phi }=\epsilon \mathcal {M}\) and ensuring that \(\lambda _{\phi }(0)=0\), we establish that problem (1.1) also demonstrates generalized Ulam-Hyers stability. \(\square\)
Numerical scheme
This section outlines a method for finding approximate numerical solutions to the impulsive power fractional-order evolution control model:
From Theorem 3, we know that the solution \(\mathbb {V}\) to this problem can be expressed piecewise via an equivalent integral Eq. (3.2). This integral equation forms the foundation of our numerical approach. Since the solution is continuous between impulse points \(\eta _{k}\) but jumps at these points, we must construct the numerical solution interval by interval \(\left[ a,\eta _{1}\right]\) ,\(\left[ \eta _{1},\eta _{2}\right] ,\ldots ,\left[ \eta _{k-1},\eta _{k}\right] .\) The core idea is to discretize each interval \((\eta _{n-1}, \eta _n]\) into small time steps and approximate \(\mathbb {V}(\eta )\) at each step. Let’s consider a generic interval \((\eta _{n-1}, \eta _n]\). We divide it into \(J_n\) small subintervals using points \(\eta ^n_j = \eta _{n-1} + j h^n\), where \(j = 0, 1, \dots , J_n\), \(\eta ^n_0 = \eta _{n-1}\), \(\eta ^n_{J_n} = \eta _n\), and \(h^n = (\eta _n - \eta _{n-1})/J_n\) is the step size for this interval.
Within this interval, the integral equation derived from (4.1) (following the logic of Eq. 3.11/3.12) involves calculating a power Caputo fractional integral of the function \(\mathbb {Y}(s, \mathbb {V}(s))\). The challenge lies in evaluating this integral numerically, especially since \(\mathbb {V}(s)\) inside \(\mathbb {Y}\) is the unknown function we are trying to find.
Our strategy is to approximate the integrand term \(v(s, \mathbb {V}(s)) = w(s)\mathbb {Y}(s, \mathbb {V}(s))\) over each small time step \([\eta ^n_{l-1}, \eta ^n_l]\). We use a simple approximation: the linear function (Lagrange polynomial of degree 1) that connects the known or estimated values of v at the beginning and end of the small step, namely \(v(\eta ^n_{l-1}, \mathbb {V}(\eta ^n_{l-1}))\) and \(v(\eta ^n_l, \mathbb {V}(\eta ^n_l))\). This approximation is explicitly given by Eq. (4.2) below. Substituting this linear approximation into the fractional integral term allows us to compute the integral analytically or using simpler quadrature over each small step \([\eta ^n_{l-1}, \eta ^n_l]\). Summing these contributions up gives an approximation for the fractional integral over the interval \([\eta _{n-1}, \eta ^n_j]\).
This leads to a step-by-step formula where we can calculate the approximate value \(\mathbb {V}(\eta ^n_{j+1})\) based on the previously calculated values \(\mathbb {V}(\eta ^n_l)\) for \(l \le j\). The explicit scheme presented below follows the structure derived from applying the power Caputo integral definition and the piecewise linear approximation.
The solution of (4.1) is constructed piecewise over intervals \(\left[ a,\eta _{1}\right]\) ,\(\left( \eta _{1},\eta _{2}\right] ,\ldots ,\left( \eta _{m},\eta _{m+1}\right]\) (where \(\eta _{m+1}=T\)) is given by the integral equation form derived from Theorem 3. This solution accounts for the impulsive effects at \(\eta _{k}.\) The numerical scheme is derived by discretizing the solution over each interval \(\left[ \eta _{n-1},\eta _{n}\right] ,n=1,2,\ldots ,m+1,\) such that \(\eta _{0}=a.\) We approximate the integral terms using the approach described below.
Let \(\upsilon \left( s,\mathbb {V}\left( s\right) \right) =w(s)\mathbb {Y} \left( s,\mathbb {V}\left( s\right) \right) .\) Now, we approximate the function \(\upsilon \left( s,\mathbb {V}\left( s\right) \right)\) on the l-th subinterval \(\left[ \eta _{l-1}^{n},\eta _{l}^{n}\right]\) within the n-th main interval (\(n=1,\dots ,m+1\), \(l=1,\dots ,J_n\)) by using the Lagrange interpolation polynomial through the points \(\left( \eta _{l-1}^{n},\upsilon \left( \eta _{l-1}^{n}, \mathbb {V}\left( \eta _{l-1}^{n}\right) \right) \right)\) and \(\left( \eta _{l}^{n},\upsilon \left( \eta _{l}^{n},\mathbb {V}\left( \eta _{l}^{n}\right) \right) \right) ,\) where \(h^{n}=\eta _{l}^{n}-\eta _{l-1}^{n}\) is the step size in the n-th interval:
Applying this approximation (4.2) to the Riemann–Liouville integral part within the definition of the power Caputo integral
over each subinterval \([\eta _{l-1}^n, \eta _l^n]\) and summing up, leads to the general numerical scheme. Replacing the approximation (4.2) in the expanded integral forms derived from the piecewise solution, we obtain the general form of approximate solutions for the value at step \(j+1\) in interval n (denoted \(\eta _{j+1}^n\)):
where \(J_{i, j+1}\) indicates the number of steps up to the point \(\eta _{j+1}^n\) within the relevant intervals \(i=1, \dots , n\). Specifically, \(J_{i,j+1}=J_i\) for \(i<n\) and \(J_{n,j+1}=j+1\). The integrals in (4.4) can be computed analytically as follows:
and
where the coefficients \(\mathcal {A}_{j,l}^{\mu }\) and \(\mathcal {B}_{j,l}^{\mu }\) are given by:
Substituting these evaluated integrals into (4.4) gives the final computable scheme. The structure presented in the paper for specific intervals (\(n=1, 2, 3\)) illustrates this accumulation:
At each impulse time \(\eta _n\), the value \(\mathbb {V}(\eta _n^+)\) needed to start the next interval is obtained from the
An application with simulation results
Consider the following impulsive power caputo model
This model describes a mechanical oscillator subject to fractional damping and impulsive effects. The displacement \(\mathbb {V}(\eta )\) is governed by a fractional-order differential equation involving the Power-Caputo derivative, which accounts for the system’s memory effects. The external forces acting on the system are represented by the nonlinear function \(\mathbb {Y}\), which includes both exponentially decaying and sinusoidal components, modulated by the system’s displacement. Impulsive effects at specific times \(\eta _{1}\) and \(\eta _{2}\) introduce sudden changes in displacement, proportional to the current displacement and scaled by exponential functions of time. Here \(\sigma =\frac{1}{3},\) \(a=10,T=100,\) \(w\left( \eta \right) =\eta\) with jumps points \(\eta _{1}=20\) and \(\eta _{2}=50,\) and
Then, for \(\mathbb {V},\widehat{\mathbb {V}}\in \mathbb {R}\), we have
and
Clearly, \(\varrho_{\mathbb {Y}}=\varrho_{\mathbb {Y}}^{\prime }=\frac{1}{50}\)and \(L_{\mathbb {A}}=\frac{1}{7},m=2.\) By some calculations, we get
and
By examining the supplied data, we conclude that hypotheses \((H_{1})\) and \((H_{2})\) are met. Consequently, all the stipulated conditions of Theorem 4 are satisfied, which ensures that problem (1.1) exhibits at least one solution.
The approximate solutions of impulsive power caputo fractional model (1.1) and its symmetric cases are display in Figs. 1, 2, 3, and 4 as follows:
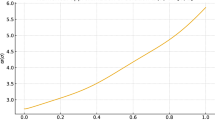
Case (1): The approximate solutions of impulsive power caputo fractional model, when \(\sigma =0.5,0.6,0.7,0.8,\) \(\mu =5,\) \(p=10,w\left( \eta \right) =\eta +2,\) is display in Fig. 1.

Graphical presentations of impulsive power caputo fractional model, when \(\sigma =0.5,0.6,0.7,0.8,\) \(\mu =5,10,\) \(p=2,w\left( \eta \right) =\eta .\).
Figure 1 demonstrates the behavior under the general Power Caputo operator. We observe smooth evolution of the oscillator’s displacement between the impulse points ( \(\eta = 5,10\)), punctuated by abrupt jumps at these instances, reflecting the sudden external influences described by \(\mathbb {A}_{k}\). Variations in the fractional order \(\sigma\) clearly impact the trajectory. Higher values of \(\sigma\) (closer to 1) lead to smoother, potentially less damped-looking curves between impulses, suggesting stronger memory effects—the system’s future state is more influenced by its longer past history. Conversely, lower \(\sigma\) values result in paths that seem to react more quickly or perhaps exhibit slightly different oscillatory characteristics, indicating weaker memory. The parameter \(p=2\) shapes the specific memory kernel via the PML function, influencing the precise nature of the memory decay.
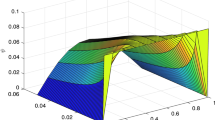
Case (2): The approximate solutions of impulsive Atangana-Baleanu fractional model, when \(\sigma =0.5,0.55,0.6,0.65,\) \(\mu =\sigma ,\) \(p=e\) and \(w\left( \eta \right) =1\) is displayed in Fig. 2.

Graphical presentations of impulsive Atangana–Baleanu fractional model, when \(\sigma =0.5,0.55,0.6,0.65,\) \(\mu =\sigma ,\) \(p=20\) and \(w\left( \eta \right) =1.\).
Figure 2 illustrates the dynamics using the Atangana–Baleanu (AB) operator, a special case relevant for systems with non-local, fading memory modeled by the Mittag–Leffler function. The solutions again show smooth evolution between impulses and sharp jumps. Compared to Fig. 1, the overall behavior might appear smoother, characteristic of the non-singular AB kernel, which is often considered suitable for modeling complex biological or viscoelastic systems where memory decays gradually following a power-law or stretched exponential pattern. Increasing \(\sigma\) (which also equals \(\mu\) here) again appears to smooth the trajectories and potentially increases the amplitude or persistence of oscillations between impulses, consistent with strengthening the memory effect captured by the Mittag–Leffler kernel.
Case (3): The approximate solutions of impulsive Caputo–Fabrizio fractional model, when \(\sigma =0.7,0.8,0.9,1,\) \(\mu =1,\) \(p=30\) and \(w\left( \eta \right) =1\) is displayed in Fig. 3.

Graphical presentations of impulsive Caputo–Fabrizio fractional model, when \(\sigma =0.7,0.8,0.9,1,\) \(\mu =1,\) \(p=30\) and \(w\left( \eta \right) =1.\).
Figure 3 uses the Caputo–Fabrizio (CF) operator, characterized by its non-singular exponential kernel. This operator is often employed for systems exhibiting exponential decay memory, like certain heat transfer or diffusion processes. The resulting trajectories show a distinctly different character, perhaps appearing more heavily damped or exhibiting less pronounced oscillations compared to AB. The exponential kernel implies a faster fading of memory compared to the Mittag–Leffler kernel. As \(\sigma\) increases towards 1, the system approaches standard integer-order behavior, which in this case appears as a smoother, potentially non-oscillatory drift between the impulses. The impulses still cause significant discontinuities.
Case (4): The approximate solutions of impulsive generalized Hattaf fractional model, when \(\sigma =0.7,0.8,0.9,1,\) \(\mu =2,\) \(p=e\) and \(w\left( \eta \right) =\eta +2\) is displayed in Fig. 4.

Graphical presentations of impulsive generalized Hattaf fractional model, when \(\sigma =0.7,0.8,0.9,1,\) \(\mu =e,\) \(p=30\) and \(w\left( \eta \right) =\eta +2.\).
Figure 4 shows the behavior under the generalized weighted Hattaf model, another special case. Here, the parameter \(p=e\) define the kernel (based on the standard Mittag-Leffler function), and the weighting function \(w\left( \eta \right) =\eta +2\) introduces heterogeneity (time-varying weighting). The solutions combine smooth evolution influenced by the Mittag–Leffler type kernel with the impulsive jumps. The weighting function \(w\left( \eta \right) =\eta +2\) directly scales the memory term, meaning the influence of past states is weighted differently as time progresses. The increasing \(\sigma\) values again lead to trajectories approaching integer-order behavior, while the specific combination of \(\mu\) and the weighting function gives these curves their distinct shape compared to the other cases.
Overall, these simulations vividly illustrate several key points:
-
Impact of Fractional Order ( \(\sigma\) ): Across all models, varying \(\sigma\) significantly alters the system dynamics, controlling the degree of memory and influencing smoothness, damping, and oscillatory behavior between impulses. Higher \(\sigma\) generally implies stronger memory effects.
-
Role of Operator Kernel: The choice of fractional operator (Power Caputo, AB, CF, Hattaf) fundamentally changes the system’s response due to the different memory kernels (PML, Mittag–Leffler, Exponential). This highlights the importance of selecting an operator whose kernel appropriately reflects the physical memory process beid.
-
Impulsive Effects: The impulsive terms ( \(\mathbb {A}_{k}\) ) consistently introduce discontinuities, demonstrating the model’s ability to capture sudden external events acting on the oscillator.
-
Weighting Function: The inclusion of \(w\left( \eta \right)\) (in Cases 1 and 4) allows modeling systems where memory effects are not uniform, adding another layer of realism. These figures demonstrate the practical applicability of the theoretical results, showing how the power Caputo framework, along with its symmetric cases, can simulate complex dynamics involving both fractional-order memory and impulsive perturbations.
The simulations confirm the existence of solutions predicted by the theorems and showcase the rich variety of behaviors that can be captured by tuning the operator parameters, providing valuable insights into the behavior of physical systems like mechanical oscillators under complex conditions.
Concluding remarks
This study successfully establishes the existence, uniqueness, and Ulam–Hyers stability of solutions for impulsive fractional differential equations (FDEs) using the generalized power Caputo fractional derivative. A key contribution is the rigorous analysis of this versatile operator, whose flexibility (owing to the parameter ‘p’) allows for enhanced, fine-tuned modeling of systems with diverse memory characteristics. This work represents a significant advancement by providing mathematically guaranteed predictability and reliability (well-posedness) for a broader class of impulsive systems than previously addressed with such generality. The unification of several known fractional operators (such as AB, CF, Hattaf) within this framework provides a cohesive analytical platform, impacting fields like control systems engineering and mathematical modeling in pharmacology where understanding systems with both memory and sudden changes is crucial. The methodology employed, involving integral formulations and fixed point theorems (Banach, Schaefer), demonstrates a robust approach applicable to this generalized derivative. Although the study relies on standard continuity and Lipschitz conditions for the nonlinear terms and impulses, acknowledging these limitations points towards future avenues. Extending the theoretical framework to encompass non-Lipschitz nonlinearities or singular impulses could significantly broaden the applicability of these results to more challenging real-world scenarios. The figures demonstrate the practical applicability of the theoretical results, showing how the power Caputo framework, along with its symmetric cases, can simulate complex dynamics involving both fractional-order memory and impulsive perturbations. The simulations confirm the existence of solutions predicted by the theorems and showcase the rich variety of behaviors that can be captured by tuning the operator parameters, providing valuable insights into the behavior of physical systems like mechanical oscillators under complex conditions. In future research, we will focus on developing accurate and efficient numerical methods for impulsive power Caputo systems, particularly those preserving stability, and apply the framework to real-world problems, such as PK/PD modeling with impulsive dosing or control of impacted mechanical systems, which is crucial for validation. Furthermore, we will extend the analysis to include stochastic effects and investigate the long-term asymptotic behavior of solutions representing important avenues for advancing the understanding of these complex systems.
Data availability
All data generated or analysed during this study are included in this article.
References
Podlubny, I. Fractional Differential Equations (Academic Press, 1999).
Samko, S. G. et al. Fractional Integrals and Derivatives (Gordon and Breach, 1993).
Magin, R. L. Fractional Calculus in Bioengineering (Begell House, 2006).
Kilbas, A. A., Srivastava, H. M. & Trujillo, J. J. Theory and Applications of Fractional Differential Equations (North-Holland Mathematics Studies, 2006).
Baleanu, D., Diethelm, K., Scalas, E. & Trujillo, J. J. Fractional Calculus Models and Numerical Methods (World Scientific, 2012).
Hamza, A. E. et al. Fractal-fractional-order modeling of liver fibrosis disease and its mathematical results with subinterval transitions. Fractal Fract. 8(11), 638 (2024).
Alraqad, T. et al. Modeling ebola dynamics with a \(\Phi\)-piecewise hybrid fractional derivative approach. Fractal Fract. 8(10), 596 (2024).
Jeelani, M. B. et al. A generalized fractional order model for COV-2 with vaccination effect using real data. Fractals 31(04), 2340042 (2023).
Aldwoah, K. A. et al. Mathematical analysis and numerical simulations of the piecewise dynamics model of Malaria transmission: A case study in Yemen. AIMS Math. 9(2), 4376–4408 (2024).
Aldwoah, K. A., Almalahi, M. A. & Shah, K. Theoretical and numerical simulations on the hepatitis B virus model through a piecewise fractional order. Fractal Fract. 7(12), 844 (2023).
Saber, H. et al. Investigating a nonlinear fractional evolution control model using W-piecewise hybrid derivatives: An application of a breast cancer model. Fractal Fract. 8(12), 735 (2024).
Lotfi, E. M., Zine, H., Torres, D. F. M. & Yousfi, N. The power fractional calculus: First definitions and properties with applications to power fractional differential equations. Mathematics 10(19), 3594 (2022).
Caputo, M. & Fabrizio, M. A new definition of fractional derivative without singular kernel. Prog. Fract. Differ. Appl. 1(2), 73–85 (2015).
Atangana, A. & Baleanu, D. New fractional derivatives with non-local and nonsingular kernel: Theory and application to heat transfer model. Therm. Sci. 20(2), 763–769 (2016).
Al-Refai, M. On weighted Atangana–Baleanu fractional operators. Adv. Differ. Equ. 11, 3 (2020).
Hattaf, K. A new generalized definition of fractional derivative with non-singular kernel. Computation 8(2), 9 (2020).
Abdo, M. S., Abdeljawad, T., Shah, K. & Jarad, F. Study of impulsive problems under Mittag–Leffler power law. Heliyon 6(10), 1 (2020).
Khan, H., Khan, A., Jarad, F. & Shah, A. Existence and data dependence theorems for solutions of an ABC-fractional order impulsive system. Chaos Solitons Fractals 131, 109477 (2020).
Abdeljawad, T., Thabet, S. T. M., Kedim, I. & Vivas-Cortez, M. On a new structure of multi-term Hilfer fractional impulsive neutral Levin–Nohel integrodifferential system with variable time delay. AIMS Math. 9(3), 7372–7395. https://doi.org/10.3934/math.2024357 (2024).
Zhao, K. Study on the stability and its simulation algorithm of a nonlinear impulsive ABC-fractional coupled system with a Laplacian operator via F-contractive mapping. Adv. Contin. Discrete Models 2024(1), 5 (2024).
Almalahi, M. A. & Panchal, S. K. Some properties of implicit impulsive coupled system via Hilfer fractional operator. Bound. Value Probl. 2021(1), 67 (2021).
Al-Sadi, W., Wei, Z., Moroz, I. & Alkhazzan, A. Existence and stability of solution in Banach space for an impulsive system involving Atangana–Baleanu and Caputo–Fabrizio derivatives. Fractals 31(10), 2340085 (2023).
Afshari, H., Roomi, V. & Kalantari, S. Existence of solutions of some boundary value problems with impulsive conditions and ABC-fractional order. Filomat 37(11), 3639–3648 (2023).
Dhayal, R. & Nadeem, M. Existence results of a nonlocal impulsive fractional stochastic differential systems with Atangana–Baleanu derivative. J. Anal. 1, 1–18 (2024).
Al Nuwairan, M. & Ibrahim, A. G. Solutions and anti-periodic solutions for impulsive differential equations and inclusions containing Atangana–Baleanu fractional derivative order \(\zeta \in \left(1,2\right)\) in infinite dimensional Banach spaces. AIMS Math. 9(4), 10386–10415 (2024).
Al-Refai, M. & Jarrah, A. M. Fundamental results on weighted Caputo–Fabrizio fractional derivative. Chaos Solitons Fractals 126, 7–11 (2019).
Hattaf, K. On some properties of the new generalized fractional derivative with non-singular kernel. Math. Probl. Eng. 6, 1580396 (2021).
Cobzaş, Ş, Miculescu, R. & Nicolae, A. Lipschitz Functions Vol. 2241 (Springer, 2019).
Ibrahim, R. W. Generalized Hyers–Ulam stability for fractional differential equations. Int. J. Math. 23, 1250056 (2012).
Sabri, T. M., Thabet, I., Kedim, B. & Abdalla, T. The \(q\)-analogues of nonsingular fractional operators with Mittag–Leffler and exponential kernels. Fractals https://doi.org/10.1142/S0218348X24400449 (2024).
Thabet, S. T. M., Abdeljawad, T., Kedim, I. & Ayari, M. I. A new weighted fractional operator with respect to another function via a new modified generalized Mittag–Leffler law. Bound. Value Probl. 2023(100), 1–16. https://doi.org/10.1186/s13661-023-01790-7 (2023).
Khan, H., Chen, W. & Sun, H. G. Analysis of positive solution and Hyers–Ulam stability for a class of singular fractional differential equations with p-Laplacian in Banach space. Math. Methods Appl. Sci. 41, 3430–3440. https://doi.org/10.1002/mma.4835 (2018).
Khan, H., Li, Y., Suna, H. & Khan, A. Existence of solution and Hyers–Ulam stability for a coupled system of fractional differential equations with p-Laplacian operator. Bound. Value Probl. 2017, 157. https://doi.org/10.1186/s13661-017-0878-6 (2017).
Thabet, S. T. M., Kedim, I. & Abdeljawad, T. Exploring the solutions of Hilfer delayed Duffing problem on the positive real line. Bound. Value Probl. 95, 1–26. https://doi.org/10.1186/s13661-024-01903-w (2024).
Salim, A., Thabet, S. T. M., Kedim, I. & Vivas-Cortez, M. On the nonlocal hybrid (\(k\), \(\phi\))-Hilfer inverse problem with delay and anticipation. AIMS Math. 9(8), 22859–22882. https://doi.org/10.3934/math.20241112 (2024).
Acknowledgements
The authors extend their appreciation to the Deanship of Research and Graduate Studies at King Khalid University for funding this work through Large group research project under Grant Number RGP2/158/46.
Author information
Authors and Affiliations
Contributions
M. Almalahi: writing—original draft preparation, conceptualization; H. Saber: writing—review and editing; A. Moumen: writing—review and editing; Blgys Muflh: software, investigation; M. Bouye: funding acquisition, writing—review and editing K. Aldwoah: formal analysis, resources, project administration. All authors have read and agreed to the published version of the manuscript.
Corresponding authors
Ethics declarations
Competing interests
The authors declare no competing interests.
Additional information
Publisher’s note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution-NonCommercial-NoDerivatives 4.0 International License, which permits any non-commercial use, sharing, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if you modified the licensed material. You do not have permission under this licence to share adapted material derived from this article or parts of it. The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by-nc-nd/4.0/.
About this article

Cite this article
Saber, H., Almalahi, M., Bouye, M. et al. Solutions behavior of mechanical oscillator equations with impulsive effects under Power Caputo fractional operator and its symmetric cases. Sci Rep 15, 16208 (2025). https://doi.org/10.1038/s41598-025-01301-x
Received:
Accepted:
Published:
Version of record:
DOI: https://doi.org/10.1038/s41598-025-01301-x
