
Abstract
Heliostats in tower solar plants, typically mounted on columnar supports in open terrains. During operation, the mirror panel is subject to significant wind pressure, resulting in considerable forces on the support structure. This paper explores the probabilistic characteristics of forces in the heliostat support structure under various conditions. Through time history curves, histograms of probability density distributions, skewness coefficients, and kurtosis coefficients, it assesses whether the forces in the heliostat support structure follow a Gaussian distribution model across all conditions and summarizes corresponding criteria. Neural network models trained using the DBO and BP algorithm are employed to calculate force coefficients. Dung beetle optimization (DBO) algorithm is a metaheuristic algorithm mimicking dung beetle ball-rolling behavior, while Back propagation (BP) neural network is a feedforward artificial neural network trained via error backpropagation to adjust parameters. Relevant indicators are used to compare the models’ performance. Based on the calculation results and summarized criteria, the conditions are classified as either following Gaussian or non-Gaussian distributions. The main reasons for the Gaussian and non-Gaussian characteristics of forces in the heliostat support structure under certain conditions are explained, providing a reference for the wind-resistant design of heliostat structures.
Similar content being viewed by others

Introduction
Heliostats endure significant wind loads due to their large surface area, flat structure, and typical installation in open areas with high wind speeds. Wind directly exerts pressure on the mirrors, while their geometry and wind-facing angles may cause airflow separation, generating turbulence and vortices. This amplifies dynamic wind loads, potentially leading to structural vibrations and fatigue1. In structural wind engineering research, fluctuating wind pressures are often assumed to follow a Gaussian distribution. However, researchers have found that the wind pressure in some areas of a heliostat’s mirror surface exhibits non-Gaussian probabilistic characteristics. Using a Gaussian distribution model to describe its probability distribution would lead to significant errors in calculated wind pressures, affecting the wind resistance and safety of the heliostat. Performing numerical simulations to calculate fluctuating wind pressures requires transient analysis, which is computationally intensive. Therefore, we can consider empirical formulas from previous studies combined with wind tunnel experiments to summarize the probabilistic characteristics of wind pressure distributions.
Force measurement experiments on heliostat structures are crucial for ensuring the efficient and reliable operation of photovoltaic systems. By calculating force and moment coefficients, the local and global pressure distribution of wind loads acting on the heliostat support structure can be determined. This analysis helps locate weak points in the support system, allowing for optimization of material usage or cross-sectional shapes. Additionally, it prevents wind-induced resonance or flutter risks, ensuring the heliostat operates safely under dynamic wind conditions. Wind tunnel tests are necessary for force measurement studies on heliostats, which draw on experiences from force measurement in building structures. Researchers study the overall forces on heliostats under wind action based on the results reported by Peterka (1988, 1992). However, due to experimental limitations at that time, Peterka’s reports assumed theoretical models for heliostats, neglecting the influence of the heliostat column, the crossbeam on the back of the mirror, and the supporting rods on the back of the mirror on wind tunnel force measurement experiments2,3. Bakhshipour investigated the impact of the length-to-width ratio and height above ground on the static wind load coefficients of heliostats, finding that increasing the aspect ratio reduces the drag coefficient and overturning moment coefficient4. Emes conducted detailed measurements of turbulence parameters and site spacing within the atmospheric boundary layer, focusing on the effects of structural geometry and turbulence parameters on heliostat wind loads5. Additionally, he performed high-frequency force measurement experiments on heliostats and calculated peak aerodynamic load coefficients using the equivalent static wind load method6. Arjomandi experimentally studied wind loads on heliostats located within the atmospheric boundary layer, finding that wind loads on heliostats are highly correlated with critical scale parameters and turbulence intensity7. He analyzed the variation patterns of wind pressure coefficients, power spectral densities, and wind load coefficients for heliostats and concentrators, noting that interactions between the concentrator and reflector slightly increase wind load coefficients8. Liuliu Peng proposes an analytical formula for the Gaussian to non-Gaussian correlation relationship using the piecewise Hermite polynomial model (PHPM) and validates its superiority in accurately describing strongly non-Gaussian distributions and eliminating monotonic limits through numerical simulations and wind pressure coefficient applications9. McIntosh, K. R measured the module temperature in single-axis trackers, revealing its dependence on wind speed and direction, irradiance, and ambient temperature10.
The Gaussian distribution is characterized by symmetry and rapidly decaying tails. If wind pressure fluctuations conform to a Gaussian distribution, their statistical properties can be fully described by the mean and variance. Gaussian processes satisfy the linear superposition principle, allowing structural response calculations to be efficiently performed using frequency-domain methods. Additionally, the Gaussian assumption simplifies the prediction of extreme wind pressure values. To assess whether wind pressure time histories exhibit Gaussian behavior, statistical tests can be applied, while the degree of non-Gaussianity can be quantified by calculating higher-order statistical moments such as skewness and kurtosis. To determine whether the surface wind pressures of different structural types follow a Gaussian distribution, appropriate ranges for skewness and kurtosis coefficients must be established. Kumar set the criteria for low-rise building surface pressure points as follows: data follows a Gaussian distribution when Csk = [−0.5,0.5] and Cku ≤ 3.5, otherwise it follows a non-Gaussian distribution11. Sun Ying set the criteria for large-span roof structure surface pressure points as follows: data follows a Gaussian distribution when Csk = [−0.2,0.2] and Cku ≤ 3.7, otherwise it follows a non-Gaussian distribution12. Bo Gong set the criteria for heliostat mirror surface pressure points as follows: data follows a Gaussian distribution when Csk = [−0.5,0.5] and Cku ≤ 4.0, otherwise it follows a non-Gaussian distribution13.
Wind load characteristics on heliostat support structures fundamentally differ from those on conventional low-rise buildings and long-span structures, rendering existing aerodynamic criteria inapplicable. This necessitates development of specialized Gaussian distribution evaluation standards for heliostat force data. Figure 1 visually presents the relationship between skewness and kurtosis coefficients for these forces, facilitating intuitive assessment. Among established references, Bo Gong’s Gaussian thresholds exhibit the broadest statistical range, followed by Kumar’s criteria, while Sun Ying’s parameters represent the strictest standard. For both drag and lift forces, most operating conditions satisfy all three criteria simultaneously. The scatter distribution of statistical moment coefficients (Csk and Cku) in the figure provides preliminary reference but is insufficient for independently determining Gaussian characteristics. Crucially, comprehensive validation requires integrating probability density histograms and time history curves with statistical coefficients. This multidimensional analysis enables accurate determination of Gaussian compliance for all force components, establishing refined criteria essential for reliable heliostat wind load characterization.

Csk vs. Cku relationship for forces on the heliostat support structure across 130 test conditions.
General information of the experiment
The physical location of the heliostat in this experiment is in a county in northwest China. The project site is flat and open, primarily covered with naturally growing grassland, with small wind-formed sand pits locally developed. Therefore, the atmospheric boundary layer characteristics are simulated based on the measured wind field in the northwest region. On-site measurements were conducted using wind characteristic measurement instruments. The measurement points are surrounded by large-scale photovoltaic arrays to the west, east, and south, while the north side is a desert area. The on-site wind characteristic measurement system consists of a wind measurement tower, anemometers, wind vanes, and data acquisition equipment. As shown in Fig. 2, a wind measurement tower approximately 10 m high was erected at the observation site, with a set of cup anemometers and low-inertia wind vane anemometers installed on the tower at every 1.4 m from the ground to measure wind speed and direction data at different heights. The wind field test used a CYD9100 data acquisition device with a sampling frequency of 32 Hz. The device is easy to operate and features 16 data sampling channels, making it suitable for high-speed data acquisition environments.

On-site measurement system.
In wind tunnel force measurement experiments, simulating the mean wind speed profile is particularly critical. Within the atmospheric boundary layer, the theoretical wind speed profile can be described by the following exponential function (1):
where Zb is the standard reference height, \(\overline{v}_{{\text{b}}}\) is the mean wind speed at the standard reference height, Z is any height above the ground, \(\overline{v}(z)\) is the wind speed at any height, and α is the ground roughness exponent. Since the measurement site is located in a desert area, according to relevant provisions in the"Load Code for the Design of Building Structures"(GB50009-2012) and combined with on-site measurement results, the site is considered to be Terrain Category A, with = α 0.12.
Since the measured wind speed power spectrum is closest to the Von Karman spectrum14, this study selects both the Von Karman spectrum and the measured wind speed power spectrum as reference spectra. The Von Karman wind speed power spectrum, proposed by Von Karman in 1948 based on the isotropic turbulence assumption, is calculated using Eqs. (2) and (3):
where \(L_{u} (z)\) is the longitudinal turbulence integral scale, n is the fluctuating wind frequency, \(\overline{{v_{z} }}\) is the mean wind speed at height z, and \(\sigma_{u}\) is the root mean square (RMS) of the fluctuating wind speed.
Figures 3,4,5 shows the wind speed, turbulence intensity profiles, and wind speed power spectrum diagrams simulated at the center of the wind tunnel turntable, based on the measured wind field in the northwest region. The turbulence intensity profiles are compared with those from Chinese standards(GB5009)15, Japanese standards(AIJ-2004)16, British standards(ESDU 85,020)17, wind tunnel experiments, and on-site measurements. The wind speed power spectrum is compared with the Von Karman spectrum, Kaimal spectrum, Davenport spectrum18, wind tunnel experiments, and on-site measured wind speed power spectrum.

Wind profile observed in wind tunnel experiments.

Turbulence profile.

Wind speed power spectrum derived from wind tunnel experiments.
This experiment was conducted in the HD-3 atmospheric boundary layer wind tunnel at Hunan University (Fig. 6). The laboratory is 14 m long, with a test section of 3.5 m wide by 3 m high and a turntable diameter of 1.8 m. The wind speed range in the test section is 0 ~ 25 m/s, allowing for wind tunnel experiments with wind direction angles ranging from 0 ~ 360° as required. The wind tunnel laboratory is equipped with a retractable three-dimensional mobile measurement frame system, using grills, spires, baffles, and roughness elements to adjust the terrain and wind field, simulating different types of sites and corresponding atmospheric boundary layers as required by the experiments. The force measurement system uses the"ATI DAQ F/T USB"six-component force balance from ATI, USA(Fig. 7). This six-component force balance decomposes the loads acting on the heliostat into force components along the X, Y, and Z axes and moment components around the X, Y, and Z axes in its rectangular coordinate system. Full-scale measurements serve as a critical bridge connecting theoretical design with actual structural performance. They not only reveal physical phenomena that cannot be replicated in laboratory settings but also provide indispensable data support for engineering optimization, risk mitigation, and enhancements to codes and standards.

Wind tunnel laboratory.

Force balance.
The scale ratio between the heliostat model used in the wind tunnel test and the actual size is 1:50. The prototype parameters are listed in Table 1. The heliostat model structure developed for this study consists of a column, a rotating axis, a truss, and a mirror panel. The mirror is a 5 mm thick glass plate with dimensions of 232 mm × 200 mm, supported by a 10 mm diameter, 2 mm thick circular hollow steel tube. The steel tube is 112 mm high and connected to the rotating axis (Figs. 8,9,10).The reference point height for the experiment is 20 cm, corresponding to an actual height of 10m.

Heliostat force measurement experiment and model.

Heliostat force and moment directions.

Heliostat model.
Based on research needs, appropriate experimental factors and corresponding levels were selected. Wind speed and direction data from the local meteorological station in 2023 were analyzed. The heliostat’s Elevation angle varies between 0° and 90°, and the azimuth angle varies between 0° and 180°. Therefore, we chose azimuth angle and Elevation angle as the experimental factors, with levels defined as every 15° for azimuth and every 10° for Elevation, resulting in 13 × 10 = 130 test conditions. The test condition breakdown is shown in Table 2. Force measurements for each condition can be obtained through force measurement tests.
According to the"Guide for Wind Tunnel Testing of Buildings"19, the formulas for drag coefficient (CFx), side force coefficient (CFy), lift coefficient (CFz), side moment coefficient (CMx), base overturning moment coefficient (CMy), and azimuth moment coefficient (CMz) are as follows Eqs. (4) and (5):
where Fx, Fy, and Fz represent the mean values of drag, side force, and lift along the x, y, and z axes, respectively. Mx, My, and Mz represent the mean values of moments around the x, y, and z axes, respectively. \(q_{H}\) is the reference wind pressure, \(q_{H} = 1/2\rho \cdot V_{H}^{2}\), in this case, \(V_{H}\) is the average wind speed at the height of the column H (H = 0.111 m) during the test. \(\rho\) is the air density. A is the characteristic area, which in this test is the area of the heliostat model’s mirror panel. L is the characteristic length, which in this test is the length of the heliostat model’s mirror panel.
This paper uses multi-order statistical moments to judge the Gaussian and non-Gaussian characteristics of the samples. The first two statistical moments (i.e., mathematical expectation and variance) are used to describe the probability density function of samples following a Gaussian distribution; the third and fourth statistical moments (skewness and kurtosis) are used to describe the characteristics of the probability density function of samples following a non-Gaussian distribution20. The expressions for skewness and kurtosis are as Eqs. (6) and (7):
In the above formula, Csk and Cku represent the skewness coefficient and kurtosis coefficient, respectively. Cpi(t) represents the sample data time history, Cpi,mean represents the sample data mean, and Cpi,rms represents the sample data fluctuation value.
Processing of experiment data
Criteria for Gaussian distribution of drag force
This test obtained time history curves, probability density histograms, and Csk and Cku values for the drag force data (Fx) on the heliostat support structure across 130 test conditions to analyze the Gaussian characteristics of Fx distribution. Due to space constraints, only examples from Table 3 are provided, showing the time history curves, probability density histograms, and Csk and Cku values for selected conditions. By observing the symmetry of the data distribution, the sharpness of its peak, and the heaviness of its tails, one can intuitively assess whether it conforms to Gaussian characteristics. Non-Gaussian distributions often exhibit asymmetry, a sharp peak with heavy tails, or a flat peak with thin tails. In Table 3, the data distribution is comprehensively judged as Gaussian (G) or non-Gaussian (NG) based on the time history curves, probability density histograms, and Csk and Cku values.
From Table 3 and Fig. 11, the drag force on the heliostat support structure under 20 test conditions exhibits distinct Gaussian and non-Gaussian behaviors. Four conditions (135–60, 180–60, 45–90, and 135–90) demonstrate non-Gaussian characteristics, characterized by large-amplitude pulse signals, asymmetric time-history curves, tailing effects in probability density histograms, and peak deviations. These cases exhibit skewness coefficients exceeding 0.2 or falling below −0.2, with kurtosis coefficients surpassing 3.6. In contrast, the remaining 16 conditions align with Gaussian behavior, displaying skewness coefficients within [−0.2, 0.2] and kurtosis coefficients within [0, 3.6]. An analysis of the time-history curves, probability density distribution histograms, and Csk and Cku values for Fx across all 20 operating conditions reveals that 16 out of the 20 conditions adhere to the aforementioned criterion, while 4 do not. Consequently, the established criterion for determining whether the Fx acting on the heliostat support structure follows a Gaussian distribution is: if Csk = −0.2 to 0.2 and Cku ≤ 3.6, the drag force data follow a Gaussian distribution; otherwise, they do not.

Time history curves and probability density histograms of heliostat drag force for selected test conditions.
Criterion for determining if lift force follows a Gaussian distribution
In this experiment, time-history curves, probability density distribution histograms, and Csk and Cku values for the Fz data of the heliostat support structure under 130 operating conditions were also obtained to analyze the Gaussian characteristics of the Fz distribution. This paper only presents the time-history curves, probability density distribution histograms, and Csk and Cku values for Fz under corresponding conditions in Table 4 for illustration.
From Table 4 and Fig. 12, analysis of the lift force (Fz) acting on the heliostat support structure under 20 operating conditions reveals distinct Gaussian and non-Gaussian distribution behaviors. Four conditions (135–30, 180–30, 45–90, and 135–90) exhibit non-Gaussian characteristics, demonstrated by asymmetric time-history curves featuring large-amplitude pulse signals or combined asymmetry and pulse activity. Their probability density histograms deviate from Gaussian profiles, showing tailing effects and peak deviations. Specifically, histograms for conditions 135–30 and 45–90 display sharper peaks compared to the Gaussian curve, while condition 135–90 exhibits a right-skewed peak deviation. These non-Gaussian cases are characterized by skewness coefficients exceeding 0.2 or falling below −0.2, along with kurtosis coefficients surpassing 3.6. In contrast, the remaining 16 conditions conform to Gaussian behavior, presenting symmetric time-history curves and probability density distributions that closely match the Gaussian profile. These Gaussian-distributed cases exhibit skewness coefficients within the range of −0.2 to 0.2 and kurtosis coefficients below 3.6. Consequently, the established criterion for determining if the Fz acting on the heliostat support structure follows a Gaussian distribution is: if Csk = −0.2 to 0.2 and Cku ≤ 3.6, the lift force data follow a Gaussian distribution; otherwise, they do not.

Time-history curves and probability density distribution histograms of heliostat lift force under some conditions.
Criterion for determining if overturning moment follows a Gaussian distribution
Table 5 provides the Csk and Cku values for the My under the same conditions as in Table 3 and Table 4, and analyzes the Gaussian characteristics of the My distribution using the time-history curves and probability density distribution histograms of My.
From Table 5 and Fig. 13, analysis of the overturning moment (My) acting on the heliostat support structure across 20 operating conditions reveals distinct distribution patterns. Four conditions (135–30, 135–60, 180–60, and 45–90) exhibit non-Gaussian behavior, characterized by asymmetrically distributed time-history curves and probability density histograms that deviate from the Gaussian profile. Conversely, the remaining 16 conditions demonstrate Gaussian characteristics with probability density distributions closely conforming to the Gaussian curve. Specifically, conditions 135–30, 135–60, and 45–90 display sharper histogram peaks compared to the Gaussian distribution, while condition 135–60 manifests a right-skewed peak deviation. Therefore, it can still be preliminarily concluded that the criterion for determining if the My acting on the heliostat support structure follows a Gaussian distribution is: if Csk = −0.2 to 0.2 and Cku ≤ 3.6, the Overturning moment data follow a Gaussian distribution; otherwise, they do not.

Time-history curves and probability density distribution histograms of heliostat overturning moment under 20 operating conditions.
In summary, the criteria presented in this paper for determining if the Fx, My and Fz acting on the heliostat support structure follow a Gaussian distribution are consistent. Thus, the criterion for determining if the forces acting on the heliostat support structure under wind loads follow a Gaussian distribution is defined as: if Csk = −0.2 to 0.2 and Cku ≤ 3.6, the data follow a Gaussian distribution; otherwise, they do not.
Calculation of force and moment coefficients for the heliostat array support structure based on the dung beetle optimization algorithm
Principle of the dung beetle optimization algorithm
The Dung Beetle Optimization (DBO) algorithm, proposed by Xue et al. in 202221, simulates the behaviors of dung beetles such as ball rolling, dancing, foraging, stealing, and reproducing to enhance the algorithm’s global exploration and local exploitation capabilities. It has shown good performance in a series of well-known mathematical test functions and has the advantage of fast convergence. The steps are as follows:
-
(1)
Ball-rolling beetles
(A) Without Obstacles: Celestial Navigation. To simulate ball-rolling behavior, dung beetles must move along a designated direction within the search space. The beetle utilizes the sun for navigation, Notably, this paper proposes that light intensity also influences the beetle’s path. During the ball-rolling phase, the position of the ball-rolling beetle is updated as follow Eqs. (8) and (9):
In the equation, \(t\) denotes the current iteration number, \(x_{i} (t)\) represents the position of the i-th beetle at iteration \(t\), \(k\) ∈ (0,0.2) indicates a constant deflection coefficient, \(b\) signifies a constant within (0,1), \(\alpha\) is a natural coefficient taking values of either −1 or 1, \(X^{w}\) corresponds to the global worst position, and \(\Delta x\) models the variation in light intensity.
When there are obstacles: dance. When obstacles impede forward movement, the dung beetle employs an orientation dance to reorient itself and establish a new trajectory. Notably, dance behavior plays a pivotal role in ball-rolling beetles. To simulate this behavior, the tangent function (tan) is utilized to derive a revised rolling direction, where only values defined over the interval [0,π] are considered. Upon successfully determining a new direction, the beetle resumes ball-rolling. Consequently, the position update for the ball-rolling beetle is defined as follow Eq. (10):
In this formulation, \(\theta\) denotes the deflection angle within the interval [0,π]. Here, \(\left| {x_{i} (t) - x_{i} (t - 1)} \right|\) represents the difference in position of the i-th beetle between iterations t and t − 1. Consequently, the position update of ball-rolling beetles is governed by both current and historical positional information.
-
(2) Brood ball deposition behavior
Upon identifying a suitable oviposition region, the female dung beetle deposits eggs within a brood ball in this area. For the DBO algorithm, each female beetle produces only one egg per iteration. As evident from Eq. (11), the boundary of the oviposition zone is dynamically updated, primarily governed by the parameter R. Consequently, the position of the brood ball is also dynamically adjusted during iterations, defined as:
In the formula, \(B_{i} (t)\) represents the position information of the i-th brood ball at the n-th iteration, \(b_{1}\) and \(b_{2}\) represent two independent random vectors of size \(1 \times D\), and \(D\) represents the dimension of the optimization problem. Please note that the position of the hatching balls is strictly limited within a certain range, which is the spawning area.
-
(3) Foraging beetles
Certain adult beetles emerge from subterranean environments to forage for food. In this study, these individuals are designated as juvenile beetles. Furthermore, we establish an optimal foraging zone to guide their foraging behavior, simulating natural foraging processes observed in dung beetles. The boundaries of this optimal foraging zone are defined as follow Eqs. (12) and (13):
Among them, \(X^{b}\) is the global optimal position, \(Lb^{b}\) and \(Ub^{b}\) are the lower and upper bounds of the optimal foraging area, respectively. Therefore, the position of the dung beetle has been updated as follow Eq. (14):
In the equation, \(x_{i}\) represents the position information of the i-th small beetle at the nth iteration, \(C_{1}\) represents a random number that follows a normal distribution, and \(C_{2}\) represents a random vector belonging to (0,1).
-
(4) Stealing Beetles
Certain dung beetles, termed stealing beetles, pilfer dung balls from other conspecifics. It should be noted that this represents a common phenomenon in nature. As indicated by Eq. (15), \(X^{b}\) denotes the globally optimal food source. We therefore postulate that the vicinity of \(X^{b}\) constitutes the optimal location for food competition. The positional update of stealing beetles during iterations is described as follow Eq. (15):
In the equation, \(x_{i}\) represents the position information of the i-th thief at the nth iteration, \(g\) is a random vector of size \(1 \times D\), following a normal distribution, and \(S\) represents a constant.
Comparison between BP neural network algorithm and dung beetle optimization algorithm
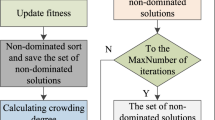
The prediction values of the BP neural network are mainly determined by the adjustment and refinement of weights and thresholds. Therefore, the weights and thresholds of the BP neural network can be regarded as the positions of the dung beetle population, with each position corresponding to a prediction value of the BP neural network. This prediction value is then used as the fitness for the social behavior of the dung beetles. By comparing and analyzing the individual positions of the dung beetles, the global and local optimal positions are evaluated and selected for the next iteration. Using the elevation, azimuth, and wind speed of the operating conditions as features, and the force coefficients as training samples, the data needs to be preprocessed before training. This includes removing and correcting suspicious samples that do not conform to the inherent laws of the samples, normalizing the data to the range of [0,1], and setting the training and testing sets in a 7:3 ratio. The various coefficient values calculated through the dung beetle optimization (DPO) algorithm and BP neural network regression are as follows(Fig. 14).


Training and testing sets for each coefficient.
After prediction, the data needs to be denormalized to restore the actual values. The prediction ability of the regression model can be measured by the average deviation and maximum deviation. A smaller value indicates that the predicted values are closer to the actual values. It can be seen that, except for the kurtosis coefficients of drag force and overturning moment calculated using the BP method, which are slightly larger, the deviation calculated using the DPO and BP methods are mostly below 30%. As shown in Table 6, among the selected 39 samples, the predicted values fit well with the actual values, and the predicted values are close to the actual values at each point. The trend of the predicted values is basically consistent with that of the actual values, and the average deviation and maximum deviation of the DPO algorithm is smaller than that of the BP algorithm, indicating a significant optimization effect. It can be used for subsequent predictions. The experiments provide complete time-history curves and statistical parameters for only 20 typical operating conditions out of 130, whereas real-world engineering requires the evaluation of complex and variable condition combinations. The DBO-BP model bridges these data gaps by efficiently calculating force coefficients for unmeasured conditions through its generalization capability. Measured data establish criteria for distribution judgment, while the DBO-BP model facilitates rapid probabilistic classification across large-scale operating conditions.
Division of data where the support structure forces follow a Gaussian distribution
Based on the algorithm mentioned above, the force coefficients corresponding to various operating conditions can be calculated using the elevation, azimuth, and wind speed. Using Csk and Cku, the corresponding conditions of the heliostat support structure forces that follow a Gaussian distribution and those that do not are divided among 130 operating conditions. This provides a simple and intuitive understanding of the distribution characteristics of the heliostat support structure forces under different operating conditions(Fig. 15). By analyzing the skewness and kurtosis coefficients of drag force, lift force, and overturning moment, combined with the criteria for judging whether the support structure forces follow a Gaussian distribution, the data can be divided accordingly. A distribution diagram is provided, showing the corresponding operating conditions of the heliostat support structure forces that follow a Gaussian distribution and those that do not among 130 operating conditions. The vertical axis represents the wind direction angle β, the horizontal axis represents the Elevation angle α, and the rectangular areas corresponding to the horizontal and vertical coordinates represent the corresponding conditions.

Statistical analysis was conducted on the skewness and kurtosis coefficients of the stress experienced by the heliostat support columns.
Figure 16 demonstrates that the drag force on heliostat support structures exhibits Gaussian distribution characteristics under most operational conditions when α ranges from 0° to 20°, while lift force shows similar behavior when α is within 0° ~ 20° or β spans 90° ~ 180°. The overturning moment demonstrates Gaussian distribution specifically when α = 60° ~ 90° and β = 0° ~ 60°. This phenomenon aligns with Wang Yingge’s analysis of non-Gaussian wind pressure distribution on heliostat mirrors using the Central Limit Theorem22. Atmospheric vortices of varying scales, which can form at any spatial location, interact with heliostat structures through energy transfer mechanisms. For small elevation angles (α), the mirror surface approximates a horizontal plane, causing incident airflow along the X-axis to generate point vortices with weak spatial correlation. Under sufficient vortex counts, their superposition exhibits Gaussian characteristics through the Central Limit Theorem. However, as α increases beyond 20°, airflow separation at mirror edges generates organized vortex structures along the X-axis, disrupting the independent and identically distributed assumption of point vortices. This spatial correlation enhancement leads to non-Gaussian force distributions in both Fx and Fz components. Similarly, for the overturning moment (My), Y-axis vortices emerge from airflow separation at low elevation angles, creating correlated loading patterns that violate Gaussian prerequisites. In contrast, when the mirror approaches vertical orientation (α > 60°), Z-axis airflow maintains weak correlation between point vortices, preserving Gaussian distribution under sufficient vortex populations. These distribution transitions originate from aerodynamic configuration changes induced by mirror angular variations, where ordered vortex structures disrupt the fundamental assumptions of the Central Limit Theorem, thereby manifesting non-Gaussian mechanical responses.

Distribution of drag force, lift force, and overturning moment on the heliostat support structure.
Conclusion
This paper analyzes the probabilistic characteristics of the forces on the heliostat array support structure under wind action and provides criteria for judging whether the forces on the heliostat support structure follow a Gaussian distribution. The conclusions are as follows:
(1) Based on comprehensive analysis of time-history curves, probability density histograms, skewness, and kurtosis coefficients for heliostat support structure forces across 130 operating conditions, this study establishes definitive criteria for identifying Gaussian-distributed wind loads. The diagnostic thresholds require simultaneous satisfaction of two statistical conditions: the skewness coefficient must fall within the range of negative zero point two to positive zero point two, while the kurtosis coefficient must not exceed three point six. Force data meeting both parameters demonstrate Gaussian characteristics, whereas deviation from either parameter indicates non-Gaussian behavior. Validation confirmed this dual-criterion approach achieves approximately ninety-seven percent classification accuracy across all three force components (Fx, Fz, My) demonstrating robust reliability for engineering applications.
(2) The effect of the DPO-optimized algorithm is significantly better than that of the BP algorithm. Except for the kurtosis coefficients of drag force and overturning moment calculated using the BP method, which are slightly larger, the deviation calculated using the DPO and BP methods are mostly below 30%. The average deviation of the DBO-BP model’s predictive power coefficient (3.3% ~ 23.4%) is lower than that of the traditional BP model (4.9% ~ 24.6%), with a maximum deviation reduction of about 5%. The predicted values fit well with the actual values, and the trend of the predicted values is basically consistent with that of the actual values.
(3) The force coefficients are calculated using the DPO algorithm, and the Gaussian characteristics of the heliostat support structure under different operating conditions are analyzed. The drag force and lift force exhibit Gaussian characteristics in various operating conditions when the Elevation angle is small, and non-Gaussian characteristics when the Elevation angle is large. The data pattern for overturning moment is just the opposite, exhibiting non-Gaussian characteristics in various operating conditions when the Elevation angle is small, and Gaussian characteristics when the Elevation angle is large. Under non-Gaussian operating conditions, instantaneous loads may induce localized plastic deformation in the support structure. The heavy-tailed characteristics of non-Gaussian loads necessitate increased damping ratios to suppress resonant amplitudes. The phase of unsteady aerodynamic forces can be determined by the sign of Cku, informing mirror elevation angle optimization to mitigate flutter risks.
Data availability
All data generated or analysed during this study are included in this published article.
Abbreviations
- α:
-
Ground roughness exponent
- C Fx :
-
Drag coefficient
- C Fy :
-
Side force coefficient
- C Fz :
-
Lift coefficient
- C Mx :
-
Side moment coefficient
- C My :
-
Base overturning moment coefficient
- C Mz :
-
Azimuth moment coefficient
- C sk :
-
Skewness coefficient
- C ku :
-
Kurtosis coefficient
- F x :
-
Drag force(N)
- M y :
-
Base overturning moment force(N)
- F z :
-
Lift force(N)
- NG:
-
Non-gaussian
- G:
-
Gaussian
- DBO:
-
Dung beetle optimization
- BP:
-
Back propagation
References
Arnaoutakis, G. E., Papadakis, N. & Katsaprakakis, D. A. Combicsp: a python routine for dynamic modeling of concentrating solar power plants. Softw Impacts 13, 100367 (2022).
Peterka, J. A., Tan, Z., Bienkiewicz, B. & Cermak, J. E. Wind loads on heliostats and parabolic dish collectors. Nasa Sti/recon Technical Rep. N. 89, 22179 (2019).
Peterka JA, Derickson RG. Wind load design methods for ground-based heliostats and parabolic dish collectors. nasa sti/recon technical report n (1992).
Bakhshipour, S., Emes, M. J., Jafari, A. & Arjomandi, M. Heliostat wind loads: effects of the aspect ratio and ground clearance ratio. Sol. Energy 269, 112332 (2024).
Emes, M., Jafari, A., Pfahl, A., Coventry, J. & Arjomandi, M. A review of static and dynamic heliostat wind loads. Sol. Energy 225, 60–82 (2021).
Emes M, Jafari A, Arjomandi M. Wind load design considerations for the elevation and azimuth drives of a heliostat. In: SolarPACES; 2019; (2019).
Arjomandi M, Emes M, Jafari A, Yu J, Collins M. A summary of experimental studies on heliostat wind loads in a turbulent atmospheric boundary layer. In: Proceedings of the 7th international conference on electronic devices, systems and applications (ICEDSA2020); 2020; (2020).
He, M., Huang, P., Gong, B., Zang, C. & Wang, Z. Wind tunnel test study on the wind load variation law of a point focus solar furnace. Front. Energy Res. 11, 1133884 (2023).
Peng, L., Liu, M., Yang, Q., Huang, G. & Chen, B. An analytical formula for gaussian to non-gaussian correlation relationship by moment-based piecewise hermite polynomial model with application in wind engineering. J. Wind. Eng. Ind. Aerodyn. 198, 104094 (2020).
K. RM, M. DA, B. AS, S. A, M. B, L. B, B. K, N. N, K. N. The influence of wind and module tilt on the operating temperature of single-axis trackers. In: 2022 IEEE 49th Photovoltaics Specialists Conference (PVSC); 2022 0005/10/20. 1033–1036. (2022).
Kumar, K. S. & Stathopoulos, T. Wind loads on low building roofs. J Struct Eng (N Y N Y) 8, 126 (2000).
Sun Y. Study on Wind Load Characteristics of Long-Span Roof Structures. Harbin Institute of Technology, (2007).
Gong, B., Wang, Z., Li, Z., Zang, C. & Wu, Z. Fluctuating wind pressure characteristics of heliostats. Renew Energy 50(3), 307–316 (2013).
Bh, A. et al. Near-ground impurity-free wind and wind-driven sand of photovoltaic power stations in a desert area. J. Wind Eng. Ind. Aerodyn 179, 483–502 (2018).
Department: Ministry of Housing and Urban-Rural Development of the People’s Republic of China. Load Code for the Design of Building Structures: GB 50009–2012.
Tamura Y, Ohkuma T, Kawai H, Uematsu Y, Kondo K. Revision of aij recommendations for wind loads on buildings. In: Structures Congress; 2004; 1–10. (2004).
Anon. Characteristics of atmospheric turbulence near the ground. Part ii: single point data for strong winds (neutral atmosphere) (esdu 85020). Engineering Sciences Data Unit (1985).
Wu Yue. Wind Engineering and Structural Wind-Resistant Design, (2014).
Research Committee on Wind Tunnel Experiment Guidelines, Sun Ying. Guidelines for Architectural Wind Tunnel Experiments, (2011).
Gioffre, M., Gusella, V. & Grigoriu, M. Non-gaussian wind pressure on prismatic buildings I: stochastic field. J. Struct. Eng. (N Y N Y). 127(9), 981–989 (2001).
Xue J, Shen B. Dung beetle optimizer: a new meta-heuristic algorithm for global optimization. The Journal of Supercomputing. 1–32 (2022).
Wang, Y. Study on Wind Load Characteristics and Wind-Induced Responses of Tower-Type Solar Heliostat Structures (Hunan University, 2011).
Funding
Talent Introduction and Research Fund Project of Changsha University. The Excellent Youth Project of Scientific Research Project of Hunan Provincial Department of Education (No. 24B0786).
Author information
Authors and Affiliations
Contributions
Haiyin Luo: Conceptualization, Methodology, Software, Formal Analysis, Writing—Original Draft; Qiwei Xiong: Data Curation, Writing—Original Draft; Xuewen Zhang: Visualization, Investigation; Shi Zuo: Investigation.
Corresponding author
Ethics declarations
Competing interests
The authors declare no competing interests.
Additional information
Publisher’s note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution-NonCommercial-NoDerivatives 4.0 International License, which permits any non-commercial use, sharing, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if you modified the licensed material. You do not have permission under this licence to share adapted material derived from this article or parts of it. The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by-nc-nd/4.0/.
About this article

Cite this article
Luo, H., Xiong, Q., Zhang, X. et al. Study on the probabilistic characteristics of forces in the support structure of heliostat array based on the DBO-BP algorithm. Sci Rep 15, 23831 (2025). https://doi.org/10.1038/s41598-025-09353-9
Received:
Accepted:
Published:
Version of record:
DOI: https://doi.org/10.1038/s41598-025-09353-9
