
Abstract
The seventh-order Sawada-Kotera-Ito equation is a fundamental nonlinear partial differential equation that arises in modeling complex wave phenomena in fluid dynamics and other physical systems. In this study, two analytical techniques, namely, the \(\phi ^6\)-model expansion method and the extended simplest equation method are employed to derive exact analytical solutions to the seventh-order Sawada-Kotera-Ito equation. As a result, we construct explicit solutions that describe solitary waves, kink and anti-kink waves, breather-type waves, and other wave structures. The efficiency and versatility of these methods are demonstrated through the systematic derivation of solutions, which are further validated through graphical representations. The obtained solutions have diverse applications in various areas of applied sciences, and the graphical structures assist researchers in understanding the physical phenomena underlying this dynamical model. Modulational instability (MI) analysis is performed to investigate the stability of the model and its solutions. The computational results confirm that these methods are simple, straightforward, and efficient. These findings provide new insights into the dynamics of higher-order nonlinear wave equations and broaden their potential applications in mathematical physics and engineering. Moreover, these methods can be applied to other nonlinear wave equations arising in mathematical physics and related fields of applied sciences.
Similar content being viewed by others


Introduction
Nonlinear partial differential equations (NLPDEs) occupy a central position as one of the most widely used models for describing complex phenomena in various scientific fields, including physics, biology, and chemistry1,2,3,4,5. Among the many aspects studied within the framework of NLPDEs, traveling waves hold a particularly significant role. These waves are crucial because, under different conditions, each type represents specific nonlinear physical phenomena. Over the years, researchers have made substantial progress in deriving and solving such equations, employing numerical, analytical, and semi-analytical techniques to obtain traveling wave solutions6,7,8,9.
Several well-established mathematical approaches have been employed to tackle NLPDEs and to extract exact or approximate solutions. Among these, the inverse scattering transform method is highly effective for solving integrable nonlinear equations10. Transformation-based techniques such as Bäcklund and Darboux transformations also play a crucial role by enabling the construction of new solutions from known ones11. Additionally, perturbation and transformation techniques, including the homotopy perturbation and reduced differential methods, serve as powerful tools for approximating solutions in nonlinear systems12,13,14. Another widely used approach is the first integral method, which involves integrating differential equations to obtain exact solutions15,16,17,18. The \(\left( \frac{G'}{G}\right)\)-expansion method has also proven effective in constructing traveling wave solutions by simplifying the treatment of nonlinear equations19,20,21. Furthermore, the sub-equation method is a commonly used technique that has successfully produced numerous soliton and periodic wave solutions22,23,24.
Moreover, Hirota’s direct method provides a systematic procedure for constructing multi-soliton solutions25,26,27. The homogeneous balance method is also considered highly effective, as it helps balance the nonlinear and derivative terms in an equation, thereby guiding the construction of analytical solutions28,29. Other significant approaches include the variational iteration method, which refines approximations through successive iterations30, and the tanh-sech method, known for its particular effectiveness in deriving soliton-type solutions31. Various methods have been applied to study nonlinear wave equations32,33,34, including the Jacobi elliptic function method, the modified simple equation method35, the exp(\(\phi (\xi )\))-expansion method36, and the alternative functional variable method37. Each of these techniques and many others constitute an essential part of the analytical toolkit for understanding nonlinear wave dynamics and their wide-ranging applications in different scientific fields38,39,40.
The \(\phi ^6\)-model expansion method and the extended simplest equation method applied in this study are effective analytical techniques for transforming NLPDEs into solvable ODEs41. These methods utilize different forms of nonlinear ODEs that enable the derivation of exact analytical solutions for complex NLPDEs42. The strength of these approaches lies in their ability to handle a wide range of nonlinearities and higher-order derivatives, making them applicable to a broad spectrum of problems involving wave propagation, fluid dynamics, and other systems characterized by nonlinear interactions43. In particular, the Riccati-Bernoulli equation, which is incorporated within the \(\phi ^6\)-model expansion method, proves especially useful due to its capacity to address both polynomial and exponential nonlinearities. This flexibility allows for the modeling of various nonlinear phenomena across different scientific domains. To apply these methods, a suitable ansatz or wave transformation is employed to reduce the NLPDE by minimizing the number of independent variables. Typically, this transformation reduces the PDE to an ODE with respect to a similarity variable, which links the spatial and temporal components of the system. This reduction significantly simplifies the structure of the PDE, making it compatible with the chosen ODE form44. Once transformed, specific solution forms usually expressed in terms of hyperbolic or trigonometric functions are assumed for the unknown function45. These assumed forms help further simplify the resulting ODE, enabling the derivation of exact solutions through systematic substitution and algebraic manipulation.
Furthermore, we present a Bäcklund transformation for the Riccati-Bernoulli equations, which plays a pivotal role in generating new solutions from known ones. This transformation enables the construction of an infinite hierarchy of novel solutions, thereby significantly expanding the solution space of the original NLPDE3. The ability to systematically derive multiple solutions from a single initial solution highlights the strength of this method in exploring the rich and diverse solution structures of NLPDEs. Such transformations are particularly valuable in the field of mathematical physics, where the existence of multiple exact solutions often leads to deeper insights into the stability, bifurcation behavior, and interaction dynamics of nonlinear wave phenomena46,47.
The Sawada-Kotera (SK) equation was introduced as a multi-Korteweg-de Vries (mKdV) equation by Wazwaz48 and has since been studied through various analytical approaches. The condensed Hirota method was applied to obtain multi-soliton solutions49, after which several researchers explored the mKdV model using different techniques, such as the sine-cosine function method50 and Kudryashov’s approach51, leading to the discovery of various types of singular solutions, including kink, bright (brilliant), and periodic waveforms. These methods were further extended to derive new dual wave solutions using modified Kudryashov and auxiliary equation methods52. As such, the SK equation is recognized as a special case of the mKdV equation. In the context of nonlinear partial differential equations with variable coefficients, the mKdV equation forms a crucial class of nonlinear models, particularly in optical fiber communications. In these models, the variable coefficients represent key physical parameters, such as group velocity dispersion, Kerr nonlinearity, third-order dispersion, cubic time-delay effects, tidal and wave energy variations, and the influence of external potentials53,54.
Recent studies on nonlinear wave propagation have highlighted the significant role of higher-order NLPDEs in modeling complex physical phenomena, particularly within the frameworks of soliton theory and integrable systems. Among these, the seventh-order Sawada Kotera Ito (SKI) equation stands out due to its high level of generality55. Building upon the fifth-order model, this equation incorporates additional dispersive terms that significantly influence the stability and evolution of solitary wave solutions56. The inclusion of these higher-order dispersive terms enhances the model’s ability to accurately describe complex, multi-scale wave interactions capabilities that are often lacking in lower-order equations. The seventh-order SKI equation has found important applications in fields such as fluid dynamics, plasma physics, and nonlinear optics, where it provides valuable insight into wave modulation, stability properties, and nonlinear wave interaction dynamics57.
The seventh-order Sawada-Kotera-Ito (SKI) equation is considered in this study because it serves as a powerful model for describing complex nonlinear wave phenomena in fluid dynamics, plasma physics, and other areas of applied science. Higher-order nonlinear partial differential equations like the SKI equation provide a more accurate representation of wave propagation, dispersion, and nonlinear interactions in various physical media58. Despite its mathematical complexity, this model captures essential dynamical features that lower-order equations cannot, such as multi-peak solitons, breathers, and kink-type structures. Therefore, investigating its exact analytical solutions not only enhances our understanding of nonlinear wave behavior but also contributes to the development of robust analytical methods that can be extended to other advanced models in mathematical physics and engineering applications. The seventh-order SKI equation has attracted considerable attention in mathematical physics due to its rich structure and integrability properties. This has motivated researchers to study it using various analytical and computational techniques to explore its soliton solutions, conservation laws, and symmetries59.
In this study, exact solutions of the seventh-order SKI equation are constructed using two analytical techniques: the \(\phi ^6\)-model expansion method and the extended simplest equation method. These methods yield explicit solutions that describe various nonlinear wave structures, including solitary waves, kink and anti-kink waves, breather-type waves, and other complex waveforms associated with the model. The effectiveness and flexibility of these techniques are demonstrated through the systematic derivation of solutions, which are further validated using graphical representations. To assess the stability of the model and its solutions, a modulational instability analysis is conducted. The computational findings confirm that both methods are simple, efficient, and robust, making them valuable tools for analyzing higher-order nonlinear wave equations.
The rest of the article is organized as follows: Section 2 presents the methods used in this study. Section 3 is devoted to the construction of exact solutions. Section 4 discusses the stability of the model. The discussion of the obtained results is provided in Section 5, and the conclusion is presented in the final section.
Methodology
Here, we introduce the extended simplest equation method (ESEM) in finding exact solutions to nonlinear evolution equations. This study considers one of the higher order nonlinear evolution equations as follows:
Here, P represents a polynomial expression involving u(x,t) and its partial derivatives, incorporating both nonlinear terms and even-order highest derivatives.
Stage 1st: The travelling wave transformation
where k and \(\omega\) are positive constant. From our last equation (1) under transformation is given the following nonlinear ODE:
The phi-model expansion approach
The key stages of this technique are as
Stage 2nd: It is considered that equation (3) has solution in the following form:
where \(B_j\) are constants, and \(h\left( \phi \right)\) is derived from the Backlund transformation, \(h\left( \phi \right) = \frac{ -\zeta p_2+ p_1 Z\left( \phi \right) }{p_1+p_2 Z \phi }\). In this context, \(\zeta\), \(p_1\), and \(p_2\) are constants with \(p_2 \ne 0\), and \(Z\left( \phi \right)\) serves as the solution to the ensuing ODE.
Stage 3rd: Applying the homogeneous balance principle on equation (3) yields the positive integer M, as shown in equation (4). First, it must be recognized that the balance number of a processor can be determined as follows
Stage 4th: In equation (3), we substitute equation (4). Thereafter, we collect all the terms involving g(\(\phi\)). Setting polynomial coefficients equal to zero yields a system of algebraic equations.
Stage 5th: These equations have been resolved by the Mathematica computational facilities, from which wave solutions for the equation (1) were discovered. Mathematica version 13.2 (https://www.wolfram.com/mathematica) was uesd to plot the figures of the soliton solutions.
Extended simplest equation approach
The key stages of this technique are as
Stage 2nd: The solution to Eq. (4) takes the form:
here \(B_i\) are arbitrary constants and the integer M arises as a positive value when balancing principle is applied to Eq. 3, and \(\psi (\phi )\) satisfies the following equation.
where the arbitrary constants are \(a_0,a_1\) and \(a_2\).
Stage 3rd: Merging Equations (7) and (8) into equation (3) and setting the coefficients of powers of \(\psi ^i\) to zero, yields an algebraic system of equations with parameters \(B_{i},a_0, a_1, a_2, k\) and \(\omega\). Mathematica solves the algebraic system and the values of the parameters to be determined.
Stage 4th: By replacing the values of the parameters obtained in Stage 3rd and \(\psi (\phi )\) into Eq. (7), one can derive the solution to Eq. (1).
Exact solution formulation of seventh-order Sawada-Kotera-Ito equation
By using phi-model expansion approach
Acquiring wave solutions for the problem tackled here is feasible by the Riccati-Bernoulli sub-ode technique and through the B acklund transformation process. The seventh-order Sawada-Kotera-Ito equation53,54 possesses the general form as
The Sawada-Kotera-Ito equation of seventh order is a high-order nonlinear partial differential equation that models the complexity of wave dynamics in physical systems including fluid mechanics, plasma physics, and nonlinear optics. It describes propagation and interaction of nonlinear waves so as to give us insight into the behavior of solitary and periodic wave phenomena. The unknown function u(x, t) represents an undetermined wave front. By using the transformation (2) on equation (9), the following ODE is obtained as
By integrating with respect to \(\phi\) once, we get.
We use the proposed approach, which takes advantage of intrinsic properties in the system balancing equations, to minimize and solve for wave structures. Integrating specific phrases enables the extraction of individual features of wave events. Substituting equations (4) and (5) into equation (11) and collecting the coefficients of Z \(\left( \phi \right)\) provides the system of equations. Solving the obtained system of equation via Mathematica software and solutions sets are obtained which shown below.
From solution sets (12), (13) and (14), The families of solutions for equation (9) are listed as follows:
Family 1
From solution set (12), we got

From solution set (13), we got

From solution set (14), we got
Family 2
From solution set (12), we got

From solution set (13), we got
From solution set (14), we got

By using extended simple equation approach
By employing the balance principle on Eq. (11), obtain \(M=2\). Thus, the solution of equation (11) is as
By substitute Eq. (27) and Eq. (8) into Eq. (11) and equate coefficients of \(\psi ^i\) to zero, this gives rise to a system of algebraic equations on \(B_i, a_0, a_1, a_2, \omega\) and k. The families of solutions follow from the solution of the corresponding equations:
Family-I If we take \(a_1=0\)
The solitary wave results of Eq. (9) can be attained from solutions sets (28) and (29) in the form as

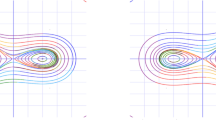
The solutions (30) and (32) are depicted by assigning suitable parameter values as follows: (A) shows a singular periodic solitary wave with CP and its 2-D representation in (B), (C) depicts a periodic solitary wave with diverse amplitudes and CP, and its 2-D representation is provided in (D), respectively.
Family-II if we take \(a_0=0\)
The solitary wave results of Eq. (9) can be attained from solutions set (34) in the form as

Family-III
The solitary wave solutions of Eq. (9) are derived from solution sets (37) and (38) as:

Stability analysis
Numerous higher-order nonlinear evolution systems exhibit instability, prompting the investigation of steady-state modulation arising from the interplay between nonlinear and dispersive effects. Applying a standard linear stability analysis39,46,47, we examine the MI of model (9). The steady-state solution for model (9) is given by:
here, S represents the normalized optical power, a measure of the steady energy level in the system. \(\mho (x,t)\) is a small perturbation, i.e. \(\mho< < \sqrt{S}\) introduced to analyze how the system behaves under slight deviations from the steady state. \(\Gamma (t)\) is an exponential growth term associated with nonlinear gain/loss mechanisms. By performing linearization and substituting Eq. (43) into Eq. (9), we obtain:
To study the temporal and spatial evolution of the perturbation, considering the solution of Eq. (44) has as
here, \(\eta\) is the amplitude of the perturbation, \(\lambda\) denote the wave number representing spatial frequency and \(\tau\) is the growth rate (normalized frequency) indicating how the perturbation evolves over time. Substituting Eq. (45) into Eq. (44) yields the following relation:
The dispersion relation in Eq. (46) indicates that the wave number, self-phase modulation, and stimulated Raman scattering influence the stability of the steady state. For all wave numbers \(\lambda\), if \(\tau\) in Eq. (46) remains real, the steady state remains stable under small perturbations.

The relation in (46) between frequency(\(\tau\)) and wave number (\(\lambda\)) is shown.
Discussion and physical interpretation of results
The soliton solutions obtained through the current methodology exhibit diverse forms, differing from those derived by other authors using alternative techniques. By precisely assigning parameter values in (5) and (10), various families of solutions have been achieved. The current techniques have proven effective in achieving novel soliton solutions. The range of solutions obtained includes peakon periodic solitons, multi-peak solitons, dark solitons, bright solitons, multipeak periodic solitons, singular periodic solitons, multipeakon solitons, kink solitons, anti-kink solitons, and lump kink-type solitons. The advantages of the current techniques effectively generates a wide range of novel and diverse soliton solutions, many of which are not found in existing literature. It outperforms previous techniques by offering exact, flexible, and previously unreported solution forms. These diverse solutions are distinct and introduce novel aspects not commonly found in the existing literature. Notably, some of the solutions discovered in this study belong to new categories that are unfamiliar in current research. The authors in53 used the sub-equation method to investigate this dynamical model. The researchers in54 investigated this model via the \(\left( G'/G \right)\)-expansion method and obtained exact closed-form solutions. Approximate solutions of this model were constructed by the authors in57 using the homotopy perturbation method and the ZZ-transform. The residual series method58 was used to obtain the approximate solution of this model in fractional form. The authors in59 used the Bell-polynomial approach to construct wave solutions of this model. In55, the authors employed the exp-function method, the \(\left( G'/G \right)\)-expansion method, and the ansatz method to construct exact solutions of this dynamical model. Therefore, this study includes solutions that have not been previously constructed using the aforementioned methods. As a result, it has produced numerous groundbreaking outcomes that are not documented in prior research.
In Fig. 1, by adjusting parameters to appropriate values, peakon periodic solitons and multi-peak solitons are obtained. In Fig. 2, the resulting solutions are bright and dark solitons. In Fig. 3, the outcome is multipeak periodic solitons. In Fig. 4, the results are multipeakon solitons. In Fig. 5, singular periodic solitary waves and periodic solitary waves are presented. In Fig. 6, dark solitons and anti-kink solitons are obtained. In Fig. 7, lump kink-type solitons and anti-kink solitons are shown. Fig. 8 depicts a plot of the dispersion relation (between frequency \(\left( \tau \right)\) and wave number \(\left( \lambda \right)\), demonstrating that for a wide range of wave numbers, \(\tau\) remains real and smooth, which verifies the robustness of the steady-state wave profile under linear disturbances.
Conclusion
In this work, we have successfully employed the \(\phi ^6\)-model expansion method and the extended simplest equation method to analyze the seventh-order Sawada-Kotera-Ito equation. As a result, we have obtained novel analytical solutions in various forms, including trigonometric, hyperbolic, exponential, and rational functions. This NLPDE is fundamental in modeling complex wave phenomena in fluid dynamics, plasma physics, and other physical systems. The derived solutions have potential applications in engineering, nonlinear physics, and fiber optics. They offer valuable insights into wave propagation in dispersive optical media and provide a foundational understanding of more complex phenomena in such systems. By assigning appropriate parameter values, the obtained solutions can represent a wide range of wave structures, such as kink-type periodic waves, bright-dark periodic wave trains, multipeak solitons, and breather-type waves. This diversity enhances the understanding of the model’s dynamic complexity. MI analysis is conducted to investigate the stability of the model and its solutions. The computational results confirm that the proposed methods are simple, efficient, and effective. Overall, these findings contribute to the deeper understanding of higher-order nonlinear wave equations and expand their potential applications in mathematical physics and engineering. Furthermore, the techniques presented here can be extended to solve other nonlinear wave equations encountered in applied sciences.
Data availability
All data generated or analysed during this study are included in this published article.
References
Borhan, J., Mamun Miah, M., Duraihem, F. Z., Iqbal, M. A. & Ma, W.-X. New optical soliton structures, bifurcation properties, chaotic phenomena, and sensitivity analysis of two nonlinear partial differential equations. Int. J. Theore. Physi. 63, 183 (2024).
Mhadhbi, N., Gana, S. & Alsaeedi, M. F. Exact solutions for nonlinear partial differential equations via a fusion of classical methods and innovative approaches. Sci. Rep. 14, 6443 (2024).
Yasin, F., Arshad, M., Farid, G., Hoseinzadeh, M. A. & Rezazadeh, H. W-shape and abundant of other solitary wave solutions of the positive gardner kadomtsov-petviashivilli dynamical model with applications. Optical Quantum Electron. 56, 1214 (2024).
Kumar, S. & Dhiman, S. K. Exploring cone-shaped solitons, breather, and lump-forms solutions using the lie symmetry method and unified approach to a coupled breaking soliton model. Physica Scripta 99, 025243 (2024).
Akinyemi, L., Erebholo, F., Palamara, V. & Oluwasegun, K. A study of nonlinear riccati equation and its applications to multi-dimensional nonlinear evolution equations. Qualitative Theory Dyn. Syst. 23, 1–43 (2024).
Duran, S. An investigation of the physical dynamics of a traveling wave solution called a bright soliton. Physica Scripta 96, 125251 (2021).
Chen, J., Zhou, L., Ding, S. & Li, F. Numerical simulation of moored ships in level ice considering dynamic behavior of mooring cable. Marine Struct. 99, 103716 (2025).
Arshad, M., Seadawy, A. R., Tanveer, M. & Yasin, F. Study on abundant dust-ion-acoustic solitary wave solutions of a (3+ 1)-dimensional extended zakharov-kuznetsov dynamical model in a magnetized plasma and its linear stability. Fractal Fract. 7, 691 (2023).
Kumar, S., Rani, S. & Mann, N. Analytical soliton solutions to a (2+ 1)-dimensional variable coefficients graphene sheets equation using the application of lie symmetry approach: Bifurcation theory, sensitivity analysis and chaotic behavior. Qualitative Theory Dyn. Syst. 24, 80 (2025).
Ablowitz, M. J. & Clarkson, P. A. Solitons, nonlinear evolution equations and inverse scattering, vol. 149 (Cambridge university press, 1991).
Rogers, C. & Schief, W. K. Backlund and Darboux transformations: geometry and modern applications in soliton theory, vol. 30 (Cambridge University Press, 2002).
Ji-Huan, H. A note on the homotopy perturbation method. Therm. Sci. 14, 565–568 (2010).
Jalili, P. et al. Python approach for using homotopy perturbation method to investigate heat transfer problems. Case Stud. Therm. Eng. 54, 104049 (2024).
Arshad, M., Lu, D. & Wang, J. (n+ 1)-dimensional fractional reduced differential transform method for fractional order partial differential equations. Commun. Nonlinear Sci. Numer. Simulation 48, 509–519 (2017).
Behera, S. Analysis of traveling wave solutions of two space-time nonlinear fractional differential equations by the first-integral method. Modern Phys. Lett. B 38, 2350247 (2024).
Zhao, H. et al. Supervised kernel principal component analysis-polynomial chaos-kriging for high-dimensional surrogate modelling and optimization. Knowledge-Based Syst. 305, 112617 (2024).
Oad, A., Arshad, M., Shoaib, M., Lu, D. & Li, X. Novel soliton solutions of two-mode sawada-kotera equation and its applications. IEEE Access 9, 127368–127381 (2021).
Aminikhah, H., Sheikhani, A. R. & Rezazadeh, H. Exact solutions for the fractional differential equations by using the first integral method. Nonlinear Eng. 4, 15–22 (2015).
Zheng, B. G-expansion method for solving fractional partial differential equations in the theory of mathematical physics. Commun. Theor. Phys. 58, 623 (2012).
Shehzad, K., Wang, J., Arshad, M. & Ghamkhar, M. Electromagnetic effects on solitons propagation of the (3+ 1)-dimensional extended zakharov-kuznetsov dynamical model with applications. Physica Scripta 99, 095528 (2024).
Wang, J., Shehzad, K., Arshad, M. & Seadawy, A. R. Physical constructions of kink, anti-kink optical solitons and other solitary wave solutions for the generalized nonlinear schrodinger equation with cubic-quintic nonlinearity. Opt. Quantum Electron. 56, 758 (2024).
Akinyemi, L., Şenol, M. & Iyiola, O. S. Exact solutions of the generalized multidimensional mathematical physics models via sub-equation method. Math. Comput. Simulation 182, 211–233 (2021).
Oluwasegun, K., Ajibola, S., Akpan, U., Akinyemi, L. & Şenol, M. Investigation of oceanic wave solutions to a modified (2+ 1)-dimensional coupled nonlinear schrödinger system. Modern Phys. Lett. B 39, 2550036 (2025).
Mann, N. & Kumar, S. In-depth analysis and exploration of rogue wave, lump wave, and different solitonic patterns to the painlevé-integrable (3+ 1) d nonlinear evolution equations using a new extended methodology. Modern Phys. Lett. B 2550093 (2025).
Mohan, B., Kumar, S. & Kumar, R. On investigation of kink-solitons and rogue waves to a new integrable (3+ 1)-dimensional kdv-type generalized equation in nonlinear sciences. Nonlinear Dyn. 113, 10261–10276 (2025).
Peng, Y. L., Lei & He, X. Transfers to earth-moon triangular libration points by sun-perturbed dynamics. Adv. Space Res. 75, 2837–2855 (2025).
Wazwaz, A.-M. The hirota s direct method for multiple-soliton solutions for three model equations of shallow water waves. Appl. Math. Comput. 201, 489–503 (2008).
Nasreen, N., Seadawy, A. R., Lu, D. & Arshad, M. Optical fibers to model pulses of ultrashort via generalized third-order nonlinear schrödinger equation by using extended and modified rational expansion method. J. Nonlinear Opt. Phys. Mater. 33, 2350058 (2024).
Zhao, X. & Tang, D. A new note on a homogeneous balance method. Phys. lett. A 297, 59–67 (2002).
Mungkasi, S. Variational iteration and successive approximation methods for a sir epidemic model with constant vaccination strategy. Appl. Math. Model. 90, 1–10 (2021).
Akinyemi, L., Şenol, M., Akpan, U. & Oluwasegun, K. The optical soliton solutions of generalized coupled nonlinear schrödinger-korteweg-de vries equations. Opt. Quantum Electron. 53, 1–14 (2021).
Arshad, M., Lu, D., Wang, J. & Abdullah. Exact traveling wave solutions of a fractional sawada-kotera equation. East Asian J. Appl. Math. 8, 211–223 (2018).
Mann, N. & Kumar, S. In-depth analysis and exploration of rogue wave, lump wave, and different solitonic patterns to the painlevé-integrable (3+ 1) d nonlinear evolution equations using a new extended methodology. Modern Phys. Lett. B 2550093 (2025).
Yasin, F., Alshehri, M. H., Arshad, M., Shang, Y. & Afzal, Z. Exploring dynamics of multi-peak and breathers-type solitary wave solutions in generalized higher-order nonlinear schrödinger equation and their optical applications. Alexandria Eng. J. 105, 402–413 (2024).
Zayed, E. M. A note on the modified simple equation method applied to sharma-tasso-olver equation. Appl. Math. Comput. 218, 3962–3964 (2011).
Lu, D., Seadawy, A. R., Wang, J., Arshad, M. & Farooq, U. Soliton solutions of the generalised third-order nonlinear schrödinger equation by two mathematical methods and their stability. Pramana 93, 1–9 (2019).
Zerarka, A., Ouamane, S. & Attaf, A. On the functional variable method for finding exact solutions to a class of wave equations. Appl. Math. Comput. 217, 2897–2904 (2010).
Mohan, B., Kumar, S. & Kumar, R. On investigation of kink-solitons and rogue waves to a new integrable (3+ 1)-dimensional kdv-type generalized equation in nonlinear sciences. Nonlinear Dyn. 113, 10261–10276 (2025).
Arshad, M., Seadawy, A. R. & Lu, D. Modulation stability and dispersive optical soliton solutions of higher order nonlinear schrödinger equation and its applications in mono-mode optical fibers. Superlattices Microstruct. 113, 419–429 (2018).
Mohan, B. & Kumar, S. Rogue-wave structures for a generalized (3+ 1)-dimensional nonlinear wave equation in liquid with gas bubbles. Physica Scripta 99, 105291 (2024).
Lu, D., Seadawy, A. & Arshad, M. Applications of extended simple equation method on unstable nonlinear schrödinger equations. Optik 140, 136–144 (2017).
Albayrak, P. et al. Pure-cubic optical solitons and stability analysis with kerr law nonlinearity. Contemporary Math. 530–548 (2023).
Engelbrecht, J. Nonlinear wave dynamics: complexity and simplicity, vol. 17 (Springer Sci. Bus. Media, 2013).
Ali, K. K., Mohamed, M. S. & Alharbi, W. G. Investigating analytical and numerical techniques for the (2+ 1) q-deformed equation. Zeitschrift für angewandte Mathematik und Physik 75, 177 (2024).
Mahmud, A. A., Tanriverdi, T., Muhamad, K. A. & Baskonus, H. M. An investigation of the influence of time evolution on the solution structure using hyperbolic trigonometric function methods. Int. J. Appl. Comput. Math. 10, 137 (2024).
Arshad, M., Seadawy, A. R. & Lu, D. Elliptic function and solitary wave solutions of the higher-order nonlinear schrödinger dynamical equation with fourth-order dispersion and cubic-quintic nonlinearity and its stability. Eur. Phys. J. Plus 132, 1–11 (2017).
Arshad, M., Seadawy, A. R. & Lu, D. Study of soliton solutions of higher-order nonlinear schrödinger dynamical model with derivative non-kerr nonlinear terms and modulation instability analysis. Results Phys. 13, 102305 (2019).
Wazwaz, A.-M., Alhejaili, W., Matoog, R. & El-Tantawy, S. Painlevé integrability and multiple soliton solutions for the extensions of the (modified) korteweg-de vries-type equations with second-order time-derivative. Alexandria Eng. J. 103, 393–401 (2024).
Li, Y.-Y., Jia, H.-X. & Zuo, D.-W. Multi-soliton solutions and interaction for a (2+ 1)-dimensional nonlinear schrödinger equation. Optik 241, 167019 (2021).
Mirzazadeh, M. et al. Optical solitons in nonlinear directional couplers by sine-cosine function method and bernoulli s equation approach. Nonlinear Dyn. 81, 1933–1949 (2015).
Kudryashov, N. A. Traveling wave reduction of the modified kdv hierarchy: The lax pair and the first integrals. Commun. Nonlinear Sci. Numer. Simul. 73, 472–480 (2019).
Adnan, M., Ahmed, N., Rani, M. & Mohsin, B. B. Generalized kudryashov and extended auxiliary equation methods for novel solitons solutions to (1+ 1)-dimensional doubly dispersive equation of murnaghan s rod. Physica Scripta 99, 125237 (2024).
Yaşar, E., Yıldırım, Y. & Khalique, C. M. Lie symmetry analysis, conservation laws and exact solutions of the seventh-order time fractional sawada-kotera-ito equation. Results Phys. 6, 322–328 (2016).
Al-Shawba, A. A., Gepreel, K., Abdullah, F. & Azmi, A. Abundant closed form solutions of the conformable time fractional sawada-kotera-ito equation using g-expansion method. Results Phys. 9, 337–343 (2018).
Guner, O. New exact solutions for the seventh-order time fractional sawada-kotera-ito equation via various methods. Waves Random Complex Media 30, 441–457 (2020).
Galaktionov, V. A. Shock waves and compactons for fifth-order non-linear dispersion equations. Eur. J. Appl. Math. 21, 1–50 (2010).
Ahmad, S. & Saifullah, S. Analysis of the seventh-order caputo fractional kdv equation: applications to the sawada-kotera-ito and lax equations. Commun. Theor. Phys. 75, 085002 (2023).
Al-Smadi, M. Fractional residual series for conformable time-fractional sawada-kotera-ito, lax, and kaup-kupershmidt equations of seventh order. Math. Methods Appl. Sci. (2021).
Shen, Y.-J., Gao, Y.-T., Yu, X., Meng, G.-Q. & Qin, Y. Bell-polynomial approach applied to the seventh-order sawada-kotera-ito equation. Appl. Math. Comput. 227, 502–508 (2014).
Acknowledgements
The authors express their gratitude to Princess Nourah bint Abdulrahman University for its support of the Researchers Supporting Project (PNURSP2025R450), Riyadh, Saudi Arabia. The authors extend their appreciation to the Deanship of Research and Graduate Studies at King Khalid University, Saudi Arabia, for the funding of this research under the Large Group Project, grant number (RGP.2 / 77/46).
Author information
Authors and Affiliations
Contributions
All Authors contributed equally and declare no conflict of interest.
Corresponding author
Ethics declarations
Competing interests
The authors declare no competing interests.
Additional information
Publisher’s note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution-NonCommercial-NoDerivatives 4.0 International License, which permits any non-commercial use, sharing, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if you modified the licensed material. You do not have permission under this licence to share adapted material derived from this article or parts of it. The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by-nc-nd/4.0/.
About this article

Cite this article
Nimra, N., Wang, T., Yasin, F. et al. Dynamics and stability of soliton solutions for the seventh-order Sawada-Kotera-Ito equation with applications. Sci Rep 15, 27841 (2025). https://doi.org/10.1038/s41598-025-13002-6
Received:
Accepted:
Published:
Version of record:
DOI: https://doi.org/10.1038/s41598-025-13002-6
