
Abstract
As the deployment of photovoltaic (PV) systems continues to expand globally, the need for robust and highly efficient Maximum Power Point Tracking (MPPT) algorithms becomes increasingly critical, particularly under complex Partial Shading Conditions (PSC) where multiple local maxima can significantly reduce energy yield. This paper proposes a novel MPPT strategy based on the bio-inspired Sooty Tern Optimization Algorithm (STOA) for Global Maximum Power Point Tracking (GMPPT) in PV arrays subjected to non-uniform irradiance. The STOA algorithm, originally developed for solving complex multimodal optimization problems, is here adapted and optimized for MPPT tasks, demonstrating superior capabilities in terms of convergence speed, tracking accuracy, and dynamic stability. Unlike conventional optimizations like PSO and GA, STOA offers a much better balance between exploration and exploitation, thus accelerating convergence and minimizing the likelihood of being trapped in local optima. These advantages prove beneficial in nonlinear, PV-shading complicated systems. A comprehensive simulation framework was implemented in MATLAB/Simulink, employing a 3 × 3 PV array (3 kW capacity) and a boost converter to test the proposed method across four shading scenarios, including highly irregular and dynamic patterns. Performance evaluation against benchmark algorithms—Perturb & Observe (P&O), Particle Swarm Optimization (PSO), and Grey Wolf Optimization (GWO)—revealed that STOA consistently outperformed its counterparts. Specifically, under the most challenging PSC scenario (Pattern 4), the proposed method achieved a tracking efficiency of 99.94%, with an average power output of 1676 W and a response time of 0.5 s, outperforming PSO (97.1%, 1630 W), GWO (94.2%, 1580 W), and P&O (56.5%, 950 W). Moreover, STOA maintained minimal power oscillations across all test patterns, ensuring stable operation and reduced wear on system components. Its computational simplicity and high precision make it particularly well-suited for real-time embedded applications in distributed solar energy systems. The proposed STOA-based MPPT framework represents a significant advancement in global optimization-based solar energy harvesting and provides a scalable, efficient, and reliable solution for maximizing PV system performance under real-world operating conditions.
Similar content being viewed by others
Introduction
Photovoltaic (PV) systems when compared to historically fossil fuel dominated energy systems have a wide range of ecological, economical and technical benefits. These include the absence of greenhouse gas emissions, reduction of air pollution, very low dependence on water, and diminished land and ecosystem impacts1. PV systems also encompass low operating expenses, energy price stability over the years, offers savings, creates jobs and rest assured in terms of energy availability and reliability. Another benefit of using PV systems is abundance of resources as non-depleting solar energy is available at almost all locations. Integration of PV systems on rooftops and other distributed generation will make our dependency on conventional power plants and fragile grid networks minimal2. In addition, PV systems can improve a country’s energy independence through using its solar energy. Space requirements of PV systems are relatively lesser than traditional generation plants, making them easier to install and deploy. They are quite amorphous whereas fossil fuel plants are very rigid. In contrast with the long lead time of fossil fuel power plants that required many years to build, PV systems operate on drastically different timelines that promote rapid innovation and the facilitation of public and private sector investment in energy. There is evidence suggesting that the use of PV systems and their promotion reduces the incidence of respiratory-related health problems caused by air pollution, which overall improves social health outcomes3,4,5. These systems eliminate many health risks associated with the burning of fossil fuels along with cleaning resources such as air and water.
It is evident that the global energy requirements are met to some extent and environmental issues are alleviated with the ease in the implementation of photovoltaic (PV) systems, given their rapid growth. Still, it must be noted the output of the photovoltaic (PV) systems is expected to perform well under the given environmental conditions which includes temperature and irradiance6,7. New techniques for maximum power point tracking (MPPT) are much better than older ones when it comes to PV systems. They make it much easier to find the global maximum power point (GMPP) and use the least amount of energy possible. Their goal is to avoid complete shading and find the GMPP on the P-V curve; therefore, they wouldn’t be limited by local maximum power points8. They achieve higher rates of convergence to the MPP, making changes to the environment suitable for the systems to respond very quickly. Modern MPPT techniques prided themselves on working in the worst situations, where traditional ones would not work in most cases, so maximum power output would be maintained. They also work to reduce oscillations in the vicinity of the MPP so as to improve energy harvest efficiency and decrease system component wear and tear. They can adjust to varying conditions and still maintain MPP tracking in extreme MPP drifting conditions. These algorithms increase energy efficiency, which allows instant monitoring, control, and optimization9. Another aspect worth mentioning is the issue of partial shading conditions (PSC), in which some modules in a PV array are shadowed due to some weather conditions or sunlight incidence from varying angles and heights due to environmental obstructions like the trees, the landscape, or buildings. These cause non-ideal and non-linear P-V characteristics to arise, achieving local power peaks or, even worse, a single global maximum power point (GMPP)10. When dealing with such problems, it would not be unjust to say that common MPPT control algorithms or techniques like the Incremental Conductance (INC) or Perturb and Observe (P&O) techniques usually cannot identify the source of maximum local power thereby leading to an unfavorable situation of power extraction11,12,13. Scenarios like this definitely take away from the overall efficiency of the PV systems, more so in cases dealing with partial shading14. Therefore, addressing the issue of operational scenarios wherein the PV system interpolates between several shading and without shading pattern. Thereby giving rise to the need for specific algorithms allowing for the PV system to sustain intense operational distress. In recent times, bio-inspired optimization algorithms have received recognition owing to their reliability for solving the non-linear and multimodal optimization problems. Algorithms such as Particle Swarm Optimization (PSO), and Grey Wolf Optimization (GWO) have been put into practice in MPPT under partial shading15,16. These approaches differ from conventional methods such as Salp swarm optimization (SSA) or cuckoo search algorithm (CSA) as they utilize stochastic search techniques and swarm intelligence to locate the GMPP with less accuracy and adaptability17,18. Nonetheless, these technical achievements also face a challenge in finding the right balance between the tracking speed, computation complexity and convergence reliability19,20.
Previous works
Several recent studies have advanced the use of metaheuristic algorithms to address the global Maximum Power Point Tracking (GMPPT) problem in photovoltaic (PV) systems operating under Partial Shading Conditions (PSC). Zafar et al.21 introduced a novel metaheuristic MPPT control technique tailored specifically for PV systems under complex PSC. The study emphasized the algorithm’s robustness and its ability to extract maximum energy by effectively distinguishing between local and global maxima on the P-V curve. This work demonstrated the efficacy of hybridizing intelligent control strategies for real-world PV conditions. Alshareef22 proposed a Falcon Optimization Algorithm-based MPPT method aimed at enhancing convergence speed and tracking accuracy under partially shaded PV systems. The Falcon algorithm capitalizes on fast, sharp directional changes, emulating falcon hunting dynamics, to rapidly locate the GMPP. This technique showed considerable improvements in response time and reduced steady-state oscillations, particularly under dynamically changing irradiance patterns. Pamuk23 provided a comparative performance analysis of various metaheuristic algorithms for MPPT under complex shading. The paper systematically benchmarked multiple algorithms—including PSO, GWO, and AOA—highlighting the trade-offs between convergence speed, power oscillations, and tracking reliability. This broad assessment is crucial for identifying suitable algorithms for specific shading scenarios. Chtita et al.24 developed a novel Arithmetic Optimization Algorithm (AOA)-based MPPT design tailored for PV energy storage systems under PSC. The AOA, inspired by arithmetic operators, was shown to effectively balance exploration and exploitation, thus improving the accuracy of the tracking process. Their work demonstrated enhanced energy capture and computational simplicity, making it suitable for embedded PV controllers. Nagadurga et al.25 focused on GMPPT optimization for PV systems affected by PSC using an adaptive and hybrid algorithmic structure. Their method emphasized a dynamic adaptation mechanism that adjusts search strategies based on real-time system feedback. The paper showcased consistent performance across diverse irradiance profiles, establishing a robust foundation for algorithmic adaptability. Wirateruna and Millenia26 proposed a PSO-based MPPT method and validated its effectiveness under varying PSC scenarios. The study reinforced the PSO algorithm’s capability to quickly identify the GMPP while minimizing computational cost. The approach was particularly useful in moderate complexity conditions and provided a baseline for evaluating newer algorithms. Sarwar et al.27 introduced a hybrid MPPT technique that combined deterministic and stochastic elements to improve GMPPT under both partial and complex PSC. Their algorithm was designed to dynamically switch between local and global search strategies, thus improving resilience in multi-peak P-V curves. This hybridization concept has significantly influenced later algorithm designs for solar tracking. In a related study, Sarwar et al.28 further extended the hybridization strategy by introducing the Horse Herd Optimization Algorithm (HOA) for MPPT under PSC. The HOA mimics social hierarchy and collective behavior in horse herds, allowing agents to dynamically shift exploration modes. The study demonstrated significant performance enhancements in both speed and accuracy of GMPPT detection. Xia et al.29 proposed an MPPT method combining Ant Colony Optimization (ACO) with fuzzy logic, enhancing the adaptability of the control mechanism under PSC. By integrating heuristic learning with fuzzy inference systems, the algorithm could better model nonlinearities in the PV system’s response, enabling superior convergence and robustness to measurement noise. Sajid et al.30 employed the Dandelion Optimizer (DO) for MPPT applications in PV systems under shading conditions. The algorithm draws from the propagation behavior of dandelions, utilizing wind-like stochastic dispersions for global search and contraction for local refinement. The paper showed notable improvements in achieving a near-optimal power point with minimal oscillations. Naser et al.31 developed an improved Coot Optimizer (COOT)-based MPPT controller capable of maintaining performance under both complex PSC and load variation. Their design emphasized simplicity and real-time implementation potential, with the algorithm exhibiting high accuracy, low latency, and excellent adaptability to environmental fluctuations. The focus of Yousaf et al. in reference32 is to improve the effectiveness and dependability of a MPPT method for solar PV systems influenced by environmental shifts such as irradiance and temperature fluctuations. In addressing this problem, the authors develop a novel hybrid optimization method built on PSO that seeks to improve conventional MPPT methods for their failure to efficiently deal with dynamic nonlinear PV systems. The study intends to enhance the speed of tracking, the accuracy of steady-state oscillation, precise capture of the GMPP convergence during partial shading scenarios. The simulations and performance tests are compared against standard algorithms confirming their hypothesis.
The study conducted by Yılmaz and Çorapsız33 focuses on creating sophisticated smart MPPT controller for solar photovoltaic installations working under a partial shading scenario. Using optimizable Gaussian Process Regression (GPR) together with High Order Sliding Mode Control (HOSMC) constitutes the novel approach proposed by the authors. This dual approach is aimed at achieving more accurate MPPT, faster tracking, and system reliability under sudden changes in irradiance. Employing machine learning algorithms (GPR) and advanced control methodology (HOSMC) allows the proposed method to predict the global maximum power point and provide stable operation with oscillations and chattering significantly reduced so that the system is less sensitive to changing environmental conditions. In addition, as pointed out in the work of Koshkarbay et al.34, one of the key focuses is on improving the use of the Social Spider Optimization (SSO) algorithm to enhance MPPT in PV)systems. The study seeks to optimize the power extracted from PV arrays in the presence of changing load conditions and partial shading, which are known to produce multiple local maxima in the power-voltage characteristics of the PV arrays. The authors in35 were presented a comparative study of different metaheuristic algorithms for MPPT methods operating under different patterns of the partial shading conditions. The paper discusses the relative success of some nature-inspired algorithms like GA and PSO on the intricate power-voltage relationships of PV arrays with shade. Furthermore, there is little explanation on how the parameters of the algorithms were set, and no mention of hybrid approaches is made. Regardless of these issues, the publication is highly motivated in setting a starting point for metaheuristic-based MPPT research for partially shaded PV systems. The authors in36 were propose a hybrid battery and supercapacitor energy storage system integrated with a dc micro-grid, providing a PV system with a new and effective MPPT strategy. In the study, the MPPT reference signals are predicted by neural networks, while PI controller gains are tuned dynamically by Ant Colony Optimization (ACO) algorithms. No nature-inspired optimization has ever been implemented alongside data-driven predictive techniques. Thus, global MPP tracking accuracy and speed has never been achieved as with this method in changing irradiance and load conditions. Simulations in of the system demonstrating the improvement in stability, resource efficiency, and reduction in steady-state oscillations with ACO tuned NN-PI Controllers against fixed gain PI and traditional MPPT approaches. The adaptability of the MPPT Controller to varying environmental and load conditions is enhanced by the incorporation of Neural Network based prediction, eliminating tracking delays. Also, the battery-supercapacitor hybrid energy system supports transient demand while smoothing power fluctuations, thus improving system robustness. The authors in37 were proposed an innovative global MPPT controller that utilizes a novel population-based optimization algorithm: Student Psychology Based Optimization (SPBO). In both 4 S and 3 S PV array configurations, SPBO improves performance under different shading conditions. The SPBO algorithm shows strong robustness in finding the global MPP for a range of shading scenarios and outperforms traditional metaheuristics significantly in both convergence speed and tracking efficiency. Its robust balance between exploration and exploitation helps prevent the algorithm from being confined to local optimal solutions, which is a common problem under partially shaded conditions.
Recent advancements in MPPT strategies emphasize the growing reliance on bio-inspired algorithms, hybrid optimization, and robust control systems for improving photovoltaic (PV) system performance under dynamic and partial shading conditions—an area that directly aligns with the objectives of this work. Ashwini et al.38 laid a foundational understanding of PV behavior by analyzing advanced solar diode models under varying conditions, reinforcing the importance of accurate modeling in MPPT strategies. Sreedhar et al.39 introduced a Flower Pollination Optimization (FPO)-based controller for fuel cells, showcasing how nature-inspired techniques can boost convergence and accuracy—traits central to the STOA method proposed here. Complementing this, Anbazhagan et al.40 applied the Egret Swarm Algorithm in hybrid solar-wind systems, emphasizing multi-modal tracking capability akin to STOA’s global search features. Ibrahim et al.41 proposed a Horse Herd Optimization algorithm with active disturbance rejection control for PV-battery systems, highlighting how metaheuristics can be embedded into robust control layers—an approach STOA naturally supports through dynamic balance between exploration and exploitation. Abdelmalek et al.42 validated a hybrid Grey Wolf Equilibrium Optimization method, confirming the efficacy of combining convergence-focused strategies for GMPPT, while Senthilkumar et al.43 employed Moth Flame Optimization for PV MPPT, echoing STOA’s reliance on swarm intelligence. Sultana et al.44 developed a high-voltage DC–DC converter integrated with a hybrid MPPT controller for fuel cell systems, indicating the importance of converter-algorithm integration—a central element in this work’s boost converter configuration. Guven45 offered a comparative study on MPPT controllers, identifying the common trade-offs among speed, stability, and ripple—parameters STOA is designed to optimize simultaneously. Similarly, Deghfel et al.46 merged genetic algorithms with Whale Optimization for adaptive MPPT, reflecting a dual-layer intelligence model that parallels STOA’s exploitation/exploration balance. Bhargavi et al.47 and Sultana et al.48 extended MPPT to battery and hydrogen fuel cell applications using hybrid controllers, where system adaptability and precision remain key, as achieved in this study through STOA’s lightweight architecture. Bouguerra et al.49 combined Flying Squirrel Optimization and Cuckoo Search to handle highly dynamic operating environments—an analogy to STOA’s capacity to track GMPP under volatile irradiance. El Mezdi et al.50 and Harrison et al.51 implemented ANN and feedback-based MPPT controllers, emphasizing data-driven and predictive adaptability; your STOA model offers a complementary alternative through rule-free dynamic tracking. Belghiti et al.52 advanced MPPT stability via adaptive FOCV and MRAC schemes, showcasing the role of model-based tuning, which your bio-inspired method circumvents while maintaining similar robustness. Hussaian and Alsaif53, along with Basha and Rani54, demonstrated the utility of PSO-ANFIS and soft computing in wide voltage and high-gain converter contexts, underlining again the significance of the boost converter design in algorithmic efficiency. Zaghba et al.55 proposed a hybrid controller that adapts to atmospheric fluctuations, highlighting environmental robustness—a defining feature of STOA in your framework. Meanwhile, El Khlifi et al.56 applied fractional-order extremum seeking for wind systems, reinforcing that intelligent MPPT frameworks like STOA can be transferred across energy domains. Belmadani et al.57 employed Seagull Optimization for GMPPT under PSC, sharing conceptual overlap with your STOA’s avian-behavior-inspired approach. Basha and Rani58 analyzed MPPT under dynamic irradiation, highlighting the need for rapid response and low computational complexity, both strengths of STOA. Deghfel et al.59 combined Super-Twisting algorithms with Grey Wolf Optimization for enhanced tracking precision and stability under PSC—complementary to your proposed method’s outcomes. Finally, Panchanathan et al.60 applied the P&O technique in EV charging with boost converters, reaffirming the critical role of power electronics and real-time MPPT methods in cross-sector applications, where STOA shows promise not just for PV but also for broader energy conversion systems. Collectively, these works underscore the relevance of biologically inspired, converter-integrated, and low-complexity MPPT methods—validating the positioning of your STOA-based controller as an advanced, scalable, and efficient solution for PV systems operating under non-uniform and fluctuating irradiance.
As highlighted in the existing literature, various metaheuristic algorithms have demonstrated considerable success in addressing Maximum Power Point Tracking (MPPT) challenges under Partial Shading Conditions (PSC), especially through global optimization strategies. However, the persistence of dynamic shading patterns and the emergence of multiple local peaks on the P-V curve continue to challenge the tracking precision and consistency of these algorithms. While several recent methods such as hybrid, nature-inspired, and swarm-based optimizers have shown promise in achieving high tracking efficiency, many still suffer from drawbacks such as delayed convergence, susceptibility to local optima, computational complexity, or instability during rapidly fluctuating irradiance. Additionally, these algorithms often require fine-tuned parameters or hybridization layers to function optimally, limiting their practicality in real-time or embedded systems. The recurring difficulty lies in maintaining a balance between fast convergence and global accuracy, particularly in scenarios with dense and irregular shading. This raises the need for a robust and lightweight global optimization approach capable of offering fast, stable, and accurate tracking of the GMPP across diverse PSC scenarios.
This paper introduces a novel GMPPT approach for PV arrays operating under complex Partial Shading Conditions (PSC), leveraging the recently developed Sooty Tern Optimization Algorithm (STOA). The STOA, a bio-inspired metaheuristic, is adapted and optimized here for MPPT applications to efficiently handle non-linear and multimodal power-voltage (P-V) characteristics caused by dynamic and irregular shading patterns. Unlike conventional techniques, the proposed method effectively overcomes local optima entrapment and demonstrates fast convergence, minimal power oscillation, and strong stability across diverse irradiance scenarios. A detailed simulation framework has been developed in MATLAB/Simulink using a 3 × 3 PV array connected to a boost converter, where four distinct irradiance patterns, including highly complex PSCs, were evaluated. The performance of the STOA-based controller was rigorously benchmarked against traditional and advanced MPPT algorithms such as Perturb & Observe (P&O), Particle Swarm Optimization (PSO), and Grey Wolf Optimization (GWO). Results showed that the proposed method consistently achieved over 99.9% tracking efficiency in the most challenging scenarios, with significant improvements in average power output, convergence time, and robustness. Moreover, the algorithm’s lightweight structure ensures computational feasibility for real-time embedded PV applications, making it a strong candidate for next-generation energy harvesting systems.
Solar system modeling
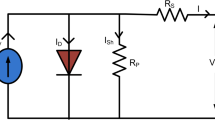
Solar energy modeling combined with a boost converter is a crucial approach to efficiently harness energy from PV systems61. The structural behavior and characteristics of a solar PV cell used in our simulation are illustrated in Fig. 1, which shows the standard equivalent circuit model employed in our analysis61. The variability in solar irradiance and temperature causes fluctuations in the power output of PV arrays, necessitating advanced techniques to operate the system at its MPP. A boost converter, paired with a MPPT algorithm, ensures optimal power transfer by dynamically adjusting the operating point of the PV array. Solar energy modeling involves the mathematical representation of a PV array to predict its performance under varying environmental conditions. The PV array equation is governed by the output current (I) of a PV cell, which is governed by the I-V and P-V characteristics of a PV module as follows61,62:
where \(\:{I}_{ph,STC}\) is the photo current, \(\:{I}_{s}\) is the diode current of PV cell, \(\:{V}_{pv}\) is the PV output voltage, \(\:{I}_{pv}\) is the output current, \(\:T\:and\:{T}_{STC}\) are the temperature and the STC temperature, \(\:G\) and \(\:{G}_{STC}\) are the solar irradiance and the irradiance value under STC. The resistors of the model are the shunt resistor of \(\:{R}_{P}\:\)and series resistor of \(\:{R}_{S}\). The thermal voltage of cells and the ideally of the diode are represent as \(\:\:{V}_{T}\) and \(\:\gamma\:\), respectively. The constant of the temperature coefficient of PV current is \(\:{K}_{I}\).
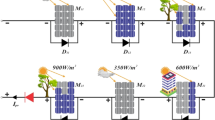
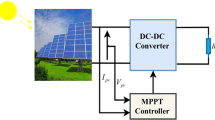
Furthermore, the MPPT algorithms are employed to maximize the power extracted from the PV array by dynamically adjusting the duty cycle of the boost converter. The system workflow includes the PV array, boost converter, proposed STOA MPPT controller, and load as shown in Fig. 2. In this work, the 3 × 3 PV array that generate 3KW is used. This configuration is illustrated in Fig. 3. The PV module type of 1Soltech-STH8 of 350 W is used. This panels are tested under STC and partial shading. The characteristic of the proposed P-V and I-V curves are shown in Fig. 4.

Solar PV cell model61.

The entire proposed PV system.

Solar array configuration.

(a) I-V curves of the suggested array (b) P-V curves.
Boost converter model
A boost converter is a DC to DC power converter which boosts (steps-up) an input voltage into an output voltage with a higher level, while having power balance (excluding efficiency losses) principle held63,64. It finds wide applications in PV systems to enhance the overall performance of a power system and regulate voltage levels between solar arrays against load or grid. The electrical circuit of this converter shown in Fig. 5. this circuit include the inductor (L) which the energy is stored in an inductor when the switch is ON and released when the switch is OFF. The switch (MOSFET or IGBT) which this component is used to charge and discharge the inductor. Also, Diode is used to limits the direction of current flow to only one direction at the output. Input and output capacitors which used to reduce the rippling effect hence making the output voltage much or input PV voltage stable. The switch is controlled based the pulse width modulation (PWM) employed in a pulse switch controls the ON and OFF states which determines the voltage boost ratio65,66.

Boost converter circuit.
The advantages of using this converter include the amount of voltage generated by the PV panels differs due to sunlight and temperature fluctuations. In this case a boost converter helps provide step-up voltage to the PV panels in order to satisfy the load, battery or inverter voltage requirements. Also, MPTP control algorithms control the duty cycle of the boost converter for maximum power harvesting from the PV panel. The boost converter changes its input impedance to the required value in order to the depth of its dynamic range with the PV maximum power point. In addition, this converter based case operates at MPPT, so are able to perform their required function at optimal efficiency. During the partial shading a voltage of some PV panels may be low which is not ideal. A boost converter resolves this problem by increasing the overall voltage to the required level. The modeling of the boost converter is done based on the continuous conduction mode (CCM). The following equations are used to calculate the inductor, input capacitor, and output capacitor66.
Where \(\:\text{d}\text{u}\text{t}\text{y}\) is the duty cycle of the converter, \(\:{\text{f}}_{\text{s}}\) is the switching frequency (5 kHz),\(\:\:{\text{I}}_{\text{o}}\) is the output current of the boost converter, and \(\:{\text{V}}_{\text{o}}\) is the output voltage of the converter.
Proposed GMPPT method based STOA
The Sooty Tern Optimization Algorithm (STOA) was developed by Gaurav Dhiman and Amandeep Kaur in 201967. It is a bio-inspired metaheuristic optimization method. Reasoning like a sooty tern that has strong feeding techniques, STOA imitates the migration and attacking movements of sooty terns. STAO was designed to address the problem of exploration versus exploitation while searching for a solution within a search space which makes it useful in solving optimization problems. Principles of STOA can be show as below67,68.
Exploration phase
There is a wide space that sooty terns wish to locate in order to exploit in search space. During exploration, agents (solutions) do try to cluster but not around local optima to maintain diversity.
Collison avoidance
In order to find the new search agent position by avoiding the collision avoidance between the neighboring sooty terns by using \(\:{S}_{A}\) based on the following Eq. (5):
Where \(\:{\overrightarrow{C}}_{st}\) represent the serahc agnet position, \(\:{S}_{A}\) is the movement of searhc agent in a given searh space, \(\:{\overrightarrow{P}}_{st}\) is the current posiiton of the sooty terns, and z represnts the current iteration. The \(\:{S}_{A}\) can be updated based on Eq. (6):
where \(\:{C}_{f}\) is the a controller factor of \(\:{S}_{A}\).
-
Finding the best direction of neighbor: after collision avoidance process, the sooty terns convergae towards the direction of the best neighbor based on the following formula:
Where \(\:{\overrightarrow{M}}_{st}\) is the different locations of the sooty tern in direction of the best position \(\:{\overrightarrow{P}}_{Best,st}\left(z\right)\). The random parameter of \(\:{C}_{B}\) can be expressed as :
where \(\:{R}_{and}\) is the random number of [0,1].
Exploitation phase
After promising regions are sufficiently located, sooty terns target to these areas and do further search. From this phase onwards, the only refinement of the solutions is done until the global optimum is reached. The sooty attack and update the prey by producing the spiral behavior in the space as follows:
Dynamic behavior
With each iteration a control parameter is used by the algorithm that controls the transition from exploration to exploitation tuning the behavior of the algorithm. The searching behavior of the SOTA algorithm canshown in Fig. 629.

STOA collision avoidance34.
-
The proposed objective function: The objective function of the SOTA in this work is the maximum power of the solar PV system as follows:
The steps of implementation this algorithm can be done based on Fig. 733,34. One of the key advantages that define the SOTA include, its ability to be a global searcher, a rapid convergence speed, robust nature in terms of being able to withstand partial shading, ability for global search, etc. Those challenges usually appear while obtaining the optimal solution and locating the of GMPP This paper seeks to analyze SOTA application in the PV sector based GMPP. The suggested method useful as it provides the ability to achieve high energy efficiency with lower overall omit in most scenarios. It can be said that by applying the SOTA PV array systems will be able to achieve optimal power tracking and maximum energy output.

The flowchart of STOA based GMPPT.
Results and analysis
The suggested GMPPT was tested under different irradiance distribution for the used PV array of the nine PV modules. The irradiance patterns can be analyzed based on the following cases. The proposed MPPT method is compared with the P&O, PSO and GWO methods in order to prove the effectiveness of the performance. the MATLAB Simulink is used to simulate the PV array, boost converter and the applied MPPT methods. The simulation time for the cases studies is kept constant with 1.5 s.7
Case 1: uniform conditions
In this pattern all PV panels subjects to same 1000 W/m^2. The suggest PV array has only one GMPP. The GMPP searching for the four applied GMPPT methods is displayed in Fig.7 as presented in this curves, the.
The theoretical power based GMPP is 3144 W under this irradiance. Based on the results in Fig. 8, the tracking average power of the proposed method is 3130 W ere the tracing efficiency is 99.55%. The PSO method presents the best efficacy with 99.8% in this pattern. The tracking time and oscillation of the PSO is weak. The tracing time of P&O is fast but it has several oscillations around the GMPP and its efficiency is 95.1%. The GWO presents moderate results in terms of efficiency and average power.
The GWO method show worst oscillation in initial of working which needs more time to reach the GMPP. The P&O has fast response but this speed is not right for searching the MPP when the PSC occur.

The obtained finding under pattern 1 (a) PV voltage (b) PV current and (c) PV power.
Case 2: partial shading with two peaks
In this pattern, the solar array was subjected to non-uniform irradiance. Some of these panels are operated with 800 W/m^2 which makes the GMPP is different. The theoretical power based GMPP is 2404 W. as shown previously in Fig. 4, this power must be tracked by the MPPT methods. The PSO method success in tracking this point as shown in Fig. 9. The PSO show reasonable performance with tracking voltage range. But in GOW, the voltage contains slight flickers within the settling period. Under the P&O the PV voltage and current an immediate spike before equilibrium is attained close to the ideal voltage or current. Also this method displays oscillating characteristics at equilibrium of the MPP. The suggested STOA method presents zero oscillation in the voltage, current and power.
The PV power of the system is optimized with high performance under both PSO and SOTA. The PSO has moderate settling time and efficiency is 98.1% while the SOTA show best efficiency of 99.88% and fast convergence time of 0.15 s. the P&O and GWO requires more time and have more oscillation around the maximum power. The P&O efficiency is 95.6% while the GWO is 96.2%.

The obtained finding under pattern 2 (a) PV voltage (b) PV current and (c) PV power.
Case 3: partial shading with three peaks
In this pattern, the array worked under complex PSC. The P-V curve of the array have on GMPP and two local MPP. the GMPP or the theoretical power based GMPP is 2164 W. this power is achieved under the STOA with about 2150 W, the average power under PSO is 2120 W, in GWO the power is 2000 W, and for P&O it is 2100 W. the details of the results for this pattern can be shown in Table 1. The proposed STOA efficiency is 99.3% and the PSO efficiency is 97.9%. Figure 10 presents the voltage, current, and power characteristics obtained under Pattern 3, where the PV system is exposed to three-peak partial shading conditions.
The STOA algorithm is a top contender for its swiftness, efficacy, and stability, especially with regard to GMPPT in PV systems that are experiencing partial shade. It would be followed closely by PSO even though it has problems with its oscillations and convergence speed. Due to the high oscillations and slow convergence it is able to operate under mildly complex conditions only. While P&O and GWO can work under partial shading they’re much less effective. The speed of tracking MPP under SOTA is o.25 s, in PSO is 0.36 s. the slower method in this pattern is GWO with 0.6 s and the P&O is 0.1 s.

The obtained finding under pattern 3 (a) PV voltage (b) PV current and (c) PV power.
Case 4: complex PSC
To evaluate the proposed SOTA method, the complex PSC is used. The irradiance values of this pattern are G11 = 1000 W/m^2, G12 = 600 W/m^2, G13 = 600 W/m^2, G21 = 200 W/m^2, G22 = 100 W/m^2, G23 = 400 W/m^2, G31 = 400 W/m^2, G32 = 500 W/m^2, G33 = 500 W/m^2. Theoretical power based GMPP under this pattern is 1677 W/m^2. Only one module subjects to 1000 W/m^2 and the other panels are subjects to low irradiance levels. this PSC makes the classical P&O method fails to track the GMPP where this method extract only 950 W from the array. the results of the PV array in terms voltage, current and power are shown in Fig. 11.
As shown in this figure, the proposed STOA presents average power of 1676 W, where its efficiency is 99.94%. As shown in Table 1, the PSO method has maximum power of 1630 W and its efficiency is 97.1%. The GWO and P&O efficiencies are 94.2% and 56.5%, respectively. The convergence speed of the STOA is very high with tracking response about 0.5 s. The response time of the PSO, GWO, and P&O are 0.6 s,0.65 s, and 0.8 s, respectively.

The obtained finding under PSC 4 (a) PV voltage (b) PV current and (c) PV power.
Conclusion
This paper introduced and validated a novel Global Maximum Power Point Tracking (GMPPT) technique utilizing the Sooty Tern Optimization Algorithm (STOA) to enhance the performance of photovoltaic (PV) systems under complex Partial Shading Conditions (PSC). The algorithm was integrated within a simulated framework consisting of a 3 kW PV array and a boost converter, and its effectiveness was assessed through four distinct irradiance scenarios, including both uniform and non-uniform patterns.
The simulation outcomes confirmed that the STOA-based MPPT method offers reliable and highly accurate tracking of the global maximum power point, particularly under challenging shading conditions where conventional and even some advanced algorithms tend to fail or show degraded performance. In comparative analysis with PSO, GWO, and P&O algorithms, STOA consistently delivered superior results—exhibiting high tracking efficiency (up to 99.94%), fast dynamic response, and reduced power oscillations across all cases. These findings underscore STOA’s strength in maintaining system stability, improving transient performance, and maximizing power extraction even in the presence of multiple local maxima on the P-V curve.
Importantly, the algorithm’s simple implementation and low computational overhead make it well-suited for real-time control environments and embedded system applications. Beyond performance metrics, this study contributes a biologically inspired optimization framework that extends the capabilities of MPPT strategies by effectively handling the non-linear, multimodal nature of PV outputs under partial shading.
Overall, the proposed method represents a step forward in the development of intelligent, adaptive MPPT solutions, and lays a foundation for further research, including hardware deployment and real-time validation under varying environmental conditions.
Data availability
The datasets used and/or analyzed during the current study available from the corresponding author on reasonable request.
References
Hui, S. C. & Chan, S. C. Integration of green roof and solar photovoltaic systems. InJoint symposium. (2011).
Cucchiella, F. & D’Adamo, I. Estimation of the energetic and environmental impacts of a roof-mounted building-integrated photovoltaic systems. Renew. Sustain. Energy Rev. 16 (7), 5245–5259 (2012).
Thebault, M., Clivillé, V., Berrah, L. & Desthieux, G. Multicriteria roof sorting for the integration of photovoltaic systems in urban environments. Sustain. Cities Soc. 60 (2020).
PraveenKumar, S., Agyekum, E. B., Velkin, V. I., Yaqoob, S. J. & Adebayo, T. S. Thermal management of solar photovoltaic module to enhance output performance: an experimental passive cooling approach using discontinuous aluminum heat sink. Int. J. Renew. Energy Res. 11, 1700–1712 (2021).
Yaqoob, S. J. & Obed, A. A. Modeling, simulation and implementation of PV system by proteus based on two-diode model. J. Techniques. 1 (1), 39–51 (2019).
Mustafa, R. J., Gomaa, M. R., Al-Dhaifallah, M. & Rezk, H. Environmental impacts on the performance of solar photovoltaic systems. Sustainability 12 (2), 608 (2020).
Hassan, M. A. et al. Evaluation of energy extraction of PV systems affected by environmental factors under real outdoor conditions. Theoret. Appl. Climatol. 150 (1), 715–729 (2022).
Mathi, D. K. & Chinthamalla, R. Global maximum power point tracking technique based on adaptive salp swarm algorithm and P&O techniques for a PV string under partially shaded conditions. Energy Sour. Part A Recover. Utilization Environ. Eff. 46 (1), 7467–7484 (2024).
Ibrahim, A. W. et al. PV maximum power-point tracking using modified particle swarm optimization under partial shading conditions. Chin. J. Electr. Eng. 6 (4), 106–121 (2020).
Yap, K. Y., Sarimuthu, C. R. & Lim, J. M. Artificial intelligence based MPPT techniques for solar power system: A review. J. Mod. Power Syst. Clean. Energy. 8 (6), 1043–1059 (2020).
Assiya, L., Aziz, D. & Ahmed, H. Comparative study of P&O and INC MPPT algorithms for DC-DC converter based PV system on MATLAB/SIMULINK. In 2020 IEEE 2nd international conference on electronics, control, optimization and computer science (ICECOCS) (2020).
Saleh, A. L., Obed, A. A., Hassoun, Z. A. & Yaqoob, S. J. Modeling and Simulation of A Low Cost Perturb& Observe and Incremental Conductance MPPT Techniques In Proteus Software Based on Flyback Converter. InIOP Conference Series: Materials Science and Engineering (2020).
Shang, L., Guo, H. & Zhu, W. An improved MPPT control strategy based on incremental conductance algorithm. Prot. Control Mod. Power Syst. 5 (2), 1–8 (2020).
Saiprakash, C., Mohapatra, A. & Nayak, B. An a TT array configuration for performance enhancement of PV system under PSC. In 2021 1st International Conference on Power Electronics and Energy (ICPEE), (2021).
Ishaque, K., Salam, Z., Amjad, M. & Mekhilef, S. An improved particle swarm optimization (PSO)–based MPPT for PV with reduced steady-state Oscillation. IEEE Trans. Power Electron. 27 (8), 3627–3638 (2012).
Alshareef, M. J. An innovative maximum power point tracking for photovoltaic systems operating under partially shaded conditions using grey Wolf optimization algorithm. Automatika 65 (4), 1487–1505 (2024).
Xiao, Y., Shen, Z., Jiao, H. & Zhao, Y. Research on MPPT control strategy based on CCAOA algorithm. Int. J. Electron. 2024 Jun 24:1–21 .
Mariprasath, T., Basha, C. H., Khan, B. & Ali, A. A novel on high voltage gain boost converter with cuckoo search optimization based MPPTController for solar PV system. Sci. Rep. 14 (1), 8545 (2024).
Dagal, I., Akın, B. & Akboy, E. MPPT mechanism based on novel hybrid particle swarm optimization and salp swarm optimization algorithm for battery charging through simulink. Sci. Rep. 12 (1), 2664 (2022).
Ghazi, G. A. et al. Dandelion optimizer-based reinforcement learning techniques for MPPT of grid-connected photovoltaic systems. IEEE Access. 12, 42932–42948 (2024).
Zafar, M. H. et al. A novel meta-heuristic optimization algorithm based MPPT control technique for PV systems under complex partial shading condition. Sustain. Energy Technol. Assess. 47, 101367 (2021).
Alshareef, M. J. An effective Falcon optimization algorithm based MPPT under partial shaded photovoltaic systems. IEEE Access. 10, 131345–131360 (2022).
Pamuk, N. Performance analysis of different optimization algorithms for MPPT control techniques under complex partial shading conditions in PV systems. Energies 16 (8), 3358 (2023).
Chtita, S., Derouich, A., Motahhir, S. & Ghzizal, A. E. A new MPPT design using arithmetic optimization algorithm for PV energy storage systems operating under partial shading conditions. Energy. Conv. Manag. 289, 117197 (2023).
Nagadurga, T. et al. Global MPPT optimization for partially shaded photovoltaic systems. Sci. Rep. 15 (1), 10831 (2025).
Wirateruna, E. S. & Millenia, A. F. Design of MPPT PV using particle swarm optimization algorithm under partial shading condition. Int. J. Artif. Intell. Rob. (IJAIR). 4 (1), 24–30 (2022).
Sarwar, S. et al. A novel hybrid MPPT technique to maximize power harvesting from PV system under partial and complex partial shading. Appl. Sci. 12 (2), 587 (2022).
Sarwar, S., Hafeez, M. A., Javed, M. Y., Asghar, A. B. & Ejsmont, K. A horse herd optimization algorithm (HOA)-based MPPT technique under partial and complex partial shading conditions. Energies 15 (5), 1880 (2022).
Xia, K., Li, Y. & Zhu, B. Improved photovoltaic MPPT algorithm based on ant colony optimization and fuzzy logic under conditions of partial shading. IEEE Access.. (2024).
Sajid, I. et al. Optimizing photovoltaic power production in partial shading conditions using dandelion optimizer (DO)-based MPPT method. Processes 11 (8), 2493 (2023).
Naser, A. T., Mohammed, K. K., Ab Aziz, N. F., binti Kamil, K. & Mekhilef, S. Improved Coot optimizer algorithm-based MPPT for PV systems under complex partial shading conditions and load variation. Energy Convers. Manag. X. 22, 100565 (2024).
Yousaf, M. Z. et al. Improved MPPT of solar PV Systems under different Environmental conditions utilizes a Novel Hybrid PSO. Renew. Energy. (2025).
Yılmaz, M. & Çorapsız, M. F. A robust MPPT method based on optimizable Gaussian process regression and high order sliding mode control for solar systems under partial shading conditions. Renew. Energy, (2025).
Koshkarbay, N. et al. Improved MPPT technology for PV systems using Social Spider optimization (SSO): Efficient handling of partial shading and load variations. Electric Power Syst. Res. (2025).
Pal, R. S. & Mukherjee, V. Metaheuristic based comparative MPPT methods for photovoltaic technology under partial shading condition. Energy. (2020).
Benfatma, H., Khouidmi, H. & Bessedik, B. Neural network and ACO algorithm-tuned PI controller for MPPT in a hybrid battery-supercapacitor energy storage system within DC micro-grid photovoltaic installations. J. Energy Storage. (2025).
Pal, R. S. & Mukherjee, V. A novel population based maximum point tracking algorithm to overcome partial shading issues in solar photovoltaic technology. Energy Conversion Manag. (2021).
Ashwini, M., Basha, C. H., Rafikiran, S. & Alsaif, F. A Novel Analysis of Advanced Solar Diode Models at Different Solar Operational Conditions. In2025 4th International Conference on Distributed Computing and Electrical Circuits and Electronics (ICDCECE). IEEE. (2025).
Sreedhar, G. et al. Development of Polymer Fuel Cell System with Improved Flower Pollination Optimization MPPT Controller. 2025 4th International Conference on Distributed Computing and and (ICDCECE). IEEE. (2025).
Anbazhagan, L. et al. Hybrid Solar-Wind Energy System with Enhanced Power Optimization Using Nature-Inspired Egret Swarm Algorithm. 2025 International Conference on Visual Analytics and Data Visualization (ICVADV). IEEE. (2025).
Ibrahim, A. W. et al. A high-speed MPPT based horse herd optimization algorithm with dynamic linear active disturbance rejection control for PV battery charging system. Sci. Rep. 15 (1), 3229 (2025).
Abdelmalek, F., Afghoul, H., Krim, F., Bajaj, M. & Blazek, V. Experimental validation of novel hybrid grey Wolf equilibrium optimization for MPPT to improve the efficiency of solar photovoltaic system. Results Eng. 25, 103831 (2025).
Senthilkumar, S. et al. Nature-Inspired Moth Flame Optimization Based MPPT Algorithm for Solar PV System. 2024 International Conference on Sustainable Communication Networks and Application (ICSCNA). IEEE. (2024).
Sultana, Z. et al. A novel development of optimized hybrid MPPT controller for fuel cell systems with high voltage transformation ratio DC–DC converter. Sci. Rep. 14 (1), 31536 (2024).
Güven, A. F. Exploring solar energy systems: A comparative study of optimization algorithms, mppts, and controllers. IET Control Theory Appl. 18 (7), 887–920 (2024).
Deghfel, N., Badoud, A. E., Merahi, F., Bajaj, M. & Zaitsev, I. A new intelligently optimized model reference adaptive controller using GA and WOA-based MPPT techniques for photovoltaic systems. Sci. Rep. 14 (1), 6827 (2024).
Bhargavi, K. M. et al. A novel development of advanced control approach for battery-fed electric vehicle systems. Sci. Rep. 14 (1), 20194 (2024).
Sultana, Z. et al. A novel development of soft computing based hybrid power point tracking controllers for hydrogen vehicle application with new wide source DC-DC converter. Results Eng. 24, 103349 (2024).
Bouguerra, A. et al. Enhancing PEM fuel cell efficiency with flying squirrel search optimization and cuckoo search MPPT techniques in dynamically operating environments. Sci. Rep. 14 (1), 13946 (2024).
El Mezdi, K. et al. Nonlinear control design and stability analysis of hybrid grid-connected photovoltaic-Battery energy storage system with ANN-MPPT method. J. Energy Storage. 72, 108747 (2023).
Harrison, A. et al. A novel MPPT-based solar irradiance estimator: integration of a hybrid incremental conductance integral backstepping algorithm for PV systems with experimental validation. Eng. Proc. 56 (1), 262 (2023).
Belghiti, H. et al. A novel adaptive FOCV algorithm with robust IMRAC control for sustainable and high-efficiency MPPT in standalone PV systems: experimental validation and performance assessment. Sci. Rep. 14 (1), 31962 (2024).
Hussaian Basha, C. H. & Alsaif, F. A novel development of wide voltage supply DC–DC converter for fuel stack application with PSO-ANFIS MPPT controller. Sci. Rep. 14 (1), 18826 (2024).
Basha, C. H. & Rani, C. Different conventional and soft computing MPPT techniques for solar PV systems with high step-up boost converters: A comprehensive analysis. Energies 13 (2), 371 (2020).
Zaghba, L. et al. Enhancing grid-connected photovoltaic system performance with novel hybrid MPPT technique in variable atmospheric conditions. Sci. Rep. 14 (1), 8205 (2024).
El Khlifi, Y., El Magri, A., Lajouad, R., El-bakkouri, J. & El Myasse, I. Fractional-Order extremum seeking based MPPT for wind energy conversion system with PMSG and ANPC inverter using model predictive control. IFAC-PapersOnLine 58 (13), 13–18 (2024).
Belmadani, H. et al. Guided seagull optimization for improved PV MPPT in partial shading. In2023 IEEE 3rd International Conference on Applied Electromagnetics, Signal Processing, & Communication (AESPC). IEEE. (2023).
Hussaian Basha, C. H. & Rani, C. Performance analysis of MPPT techniques for dynamic irradiation condition of solar PV. Int. J. Fuzzy Syst. 22 (8), 2577–2598 (2020).
Deghfel, N. et al. Improving maximum power point tracking efficiency in solar photovoltaic systems using super-twisting algorithm and grey Wolf optimizer. IET Renew. Power Gener. 18 (15), 3329–3354 (2024).
Panchanathan, S. et al. Solar PV Incorporated with Boost Converter Using Perturbation and Observation Method of Maximum Power Point Tracking Technique for EV Charging Application. Energy 4.063–85 (CRC, 2025).
Yaqoob, S. J. et al. Comparative study with practical validation of photovoltaic monocrystalline module for single and double diode models. Sci. Rep. 11 (1), 19153 (2021).
Yaqoob, S. J., Motahhir, S. & Agyekum, E. B. A new model for a photovoltaic panel using proteus software tool under arbitrary environmental conditions. J. Clean. Prod. 333, 130074 (2022).
Haseeb, I. et al. Solar power system assessments using ann and hybrid boost converter based Mppt algorithm. Appl. Sci. 11 (23), 11332 (2021).
Nasser, K. W., Yaqoob, S. J. & Hassoun, Z. A. Improved dynamic performance of photovoltaic panel using fuzzy logic-MPPT algorithm. Indonesian J. Electr. Eng. Comput. Sci. 21 (2), 617–624 (2021).
Pradhan, A. & Panda, B. A simplified design and modeling of boost converter for photovoltaic Sytem. Int. J. Electr. Comput. Eng. 8 (1), 141 (2018).
Das, D. & Pradhan, S. K. Modeling and simulation of PV array with boost converter: an open loop study (Doctoral dissertation).
Dhiman, G. & Kaur, A. STOA: a bio-inspired based optimization algorithm for industrial engineering problems. Eng. Appl. Artif. Intell. 82, 148–174 (2019).
Houssein, E. H., Oliva, D., Celik, E., Emam, M. M. & Ghoniem, R. M. Boosted sooty Tern optimization algorithm for global optimization and feature selection. Expert Syst. Appl. 213, 119015 (2023).
Author information
Authors and Affiliations
Contributions
Mohammed Taha Kaaitan, Rashid Ali Fayadh: Conceptualization, Methodology, Software, Visualization, Investigation, Writing- Original draft preparation. Zuhair S. AL-sagar, Salam J. Yaqoob: Data curation, Validation, Supervision, Resources, Writing - Review & Editing. Mohit Bajaj, Mebratu Sintie Geremew: Project administration, Supervision, Resources, Writing - Review & Editing.
Corresponding author
Ethics declarations
Competing interests
The authors declare no competing interests.
Additional information
Publisher’s note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution-NonCommercial-NoDerivatives 4.0 International License, which permits any non-commercial use, sharing, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if you modified the licensed material. You do not have permission under this licence to share adapted material derived from this article or parts of it. The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by-nc-nd/4.0/.
About this article

Cite this article
Kaaitan, M.T., Fayadh, R.A., AL-sagar, Z.S. et al. A novel global MPPT method based on sooty tern optimization for photovoltaic systems under complex partial shading. Sci Rep 15, 27030 (2025). https://doi.org/10.1038/s41598-025-13007-1
Received:
Accepted:
Published:
Version of record:
DOI: https://doi.org/10.1038/s41598-025-13007-1
