
Abstract
This work is a generalization of the coupled system of fractional differential equations governed by the multi-term \([\psi ,w]\)-Caputo-Fabrizio derivatives. Different fractional dynamics are supported by the kernel weight and monotone functions, and the system incorporates nonlinear, nonlocal initial conditions. Banach’s and Krasnoselskii’s fixed point theorems are applied to prove the existence, uniqueness, and Ulam-Hyers stability theorems. Furthermore, Schauder’s fixed point theorem and the controllability Gramian are used to investigate controllability conclusions for both linear and nonlinear scenarios. To demonstrate the system’s adaptability and broad applicability, several special cases are discussed. An example is provided to demonstrate how theoretical results are validated. The suggested system is used as a practical application to simulate the dynamics of an epidemic involving susceptible, infected, and recovered populations, proving the framework’s applicability and flexibility in real-world problems.
Similar content being viewed by others

Introduction
In disciplines like physics, biology, and engineering, fractional calculus-which extends differentiation and integration to noninteger orders-has become a potent tool for simulating intricate phenomena with memory effects. Fractional calculus was first developed in the 17th century by Leibniz and L’Hôpital, and in the 19th and 20th centuries by Riemann, Liouville, and Caputo, it acquired rigorous mathematical underpinnings. Osler1 and Kilbas et al.2 introduced the fundamental ideas and important definitions of fractional calculus. Furthermore, Diethelm and Ford4 and Samko et al.3 have added to the historical development of FC by emphasizing its applications in various scientific and engineering fields. In systems where conventional fractional derivatives are less useful, the 2015 Caputo-Fabrizio fractional derivative is appropriate because it provides a non-singular kernel.
The theory of fractional differential equations (FDEs) has been greatly advanced by earlier research. The new derivative was proposed by Caputo and Fabrizio (2015)5, and its properties and applications were further investigated by Losada and Nieto (2015)6. Recent research has investigated sophisticated uses of the Caputo-Fabrizio fractional derivative in mathematical modeling and analysis, such as impulsive differential equations, logistic growth dynamics, and numerical techniques7,8,9. Almeida11 introduced the \(\psi\)-Caputo fractional derivative, while other works, like those by Atangana and Baleanu (2016)10, expanded fractional derivatives to include generalized kernels. The idea of a weighted fractional derivative was also put forth by Jarad et al.13. Al-Refai12 built on these advancements by combining the two methods in the creation of a new operator called the \([\psi , w]\)-fractional derivative. Recently, there has been a lot of interest in the literature about the weighted fractional derivative, which is defined using different fractional operators (see14,15,16,17,18). The existence of solutions and the Ulam-Hyers stability for FDEs involving the Caputo-Fabrizio derivative have been the subject of numerous investigations (see20,21,22,23,24) and the references therein.
For instance, the following Caputo-type nonlocal FDEs’ existence results were established by Benchohra et al.27:
The existence of solutions for nonlinear implicit FDEs involving the \(\psi\)-Caputo derivative was discussed by the authors in28.
The authors examined the Ulam-Hyers stability and existence of solutions to the following nonlocal implicit FDE in29:
where \(0< \mu < 1\), \(\vartheta : \mho \times {\mathbb {R}} \times {\mathbb {R}} \rightarrow {\mathbb {R}}\) is a continuous function, \(g \in C(\mho , {\mathbb {R}})\) is a nonlocal functional, \(w, \psi \in C^1(\mho )\) are weight and monotone functions with \(w, w', \psi ' > 0\), and \({}^{\text {CF}}D_{a;w}^{\mu ;\psi }\) is the \([\psi , w]\)-Caputo-Fabrizio fractional derivative.
Building on earlier studies on ABC-fractional operators, Hilfer-type problems, and weighted fractional operators with respect to another function25,26, this work advances recent developments in fractional calculus and its applications by investigating the existence and controllability of solutions for multi-term fractional coupled systems involving the generalized \([\psi , w]\)-Caputo-Fabrizio operator. Specifically, we extend problem (1) to an n-coupled system of FDEs, where each equation is a linear combination of several fractional derivatives of different orders, thereby providing a more accurate representation of complex real-world dynamics. In particular, we propose a system of n coupled FDEs in which each equation incorporates the sum of several \([\psi , w]\)-Caputo-Fabrizio fractional derivatives:
where \(\rho _i(x)\) is the i-th component of the solution vector \({\mathscr {P}}(x): = (\rho _1(x), \ldots , \rho _n(x))^T\), \(0< \mu _{ij} < 1\) are the fractional orders for the j-th derivative in the i-th equation, \(j = 1, \ldots , m_i\), \(\alpha _{ij} \in {\mathbb {R}}\) are constant coefficients, \({}^{\text {CF}}D_{a;w}^{\mu _{ij};\psi }\) is the \([\psi , w]\)-Caputo-Fabrizio fractional derivative of order \(\mu _{ij}\), \(\vartheta _i: \mho \times {\mathbb {R}}^n \times {\mathbb {R}}^{n \cdot m} \rightarrow {\mathbb {R}}\), where \(m = \max \{m_1, \ldots , m_n\}\), depends on all components \(\rho _i(x)\) and their fractional derivatives, \(c_i \in {\mathbb {R}}\), and \(g_i: C(\mho , {\mathbb {R}}^n) \rightarrow {\mathbb {R}}\) are continuous nonlocal functionals, \(\mho = \mho\) is a finite interval, and \(\psi (x)\) and w(x) are the monotone and weight functions, respectively, with \(w, \psi \in {\mathcal {C}}^1(\mho )\) and \(w, w', \psi ' > 0\) on \(\mho\).
The need to bridge theory and practice is what motivates this work, which involves adding weights \(w(x)\), time-scale functions \(\psi (x)\), and nonlocal conditions to the model. Systems with different dynamics, like diffusion in porous media or coupled biological processes, are better described by these additions. To aid comprehension and facilitate numerical implementation, particularly in cases where previous research lacked tangible examples, this paper also provides a practical application to simulate the dynamics of an epidemic with clearly defined parameters.
This work contributes by proving the existence and uniqueness of solutions for the suggested system and using the Ulam–Hyers stability concept to guarantee the robustness of these solutions. The theoretical framework is further enhanced by the derivation of controllability results for both linear and nonlinear cases. The study also addresses several special cases that the system can handle, such as different types of weight functions and boundary conditions. Theoretical results are validated with a numerical example for n=2. Finally, an epidemic case study is presented to illustrate the practicality and flexibility of the proposed model in addressing real-world scenarios.
The following is the outline. Section 2 contains the preliminary data, which includes definitions and notation. The main theorems are introduced in Section 3. Section 4 presents several special cases of the proposed system. Sections 5 and 6 provide an example and an epidemiological application. Section 7 concludes the research with a list of future projects.
Preliminaries
We start this section by providing some basic nomenclature and notations. Let \(a< b < \infty\), \({\mathbb {R}}\), and \(\mho := [a,b]\) be the set of real numbers. We define \(C(\mho , {\mathbb {R}}^n)\) and \(AC(\mho , {\mathbb {R}}^n)\) as the spaces of continuous and absolutely continuous functions, respectively, mapping \(\mho\) into \({\mathbb {R}}^n\), each endowed with the supremum norm
suffices, as long as \({\mathscr {D}}(x)\) is clearly defined. where \({\mathscr {P}}(x) = (\rho _1(x), \ldots , \rho _n(x))^T\), \(C^1(\mho )\) represents the set of continuous and absolutely continuous functions. Let w(x) and \(\psi (x)\) be the weight and monotone functions, respectively, with \(w, \psi \in {\mathcal {C}}^1(\mho )\) and \(w, w', \psi ' > 0\) on \(\mho\).
Definition 1
(12) Let \(0< \mu < 1\) and \(\rho \in AC[\mho , {\mathbb {R}}]\). The left \([\psi , w]\)-Caputo-Fabrizio fractional derivative is defined as:
where \(\lambda _\mu = \frac{\mu }{1 - \mu }\), and \({\mathscr {N}}(\mu )\) is a normalization function with \({\mathscr {N}}(0) = {\mathscr {N}}(1) = 1\).
Definition 2
(12) Let \(0< \mu < 1\) and \(\rho \in AC[\mho , {\mathbb {R}}]\). The left \([\psi , w]\)-Caputo-Fabrizio fractional integral is defined as:
Lemma 1
(12) For \(0< \mu < 1\) and \(\rho \in AC[\mho , {\mathbb {R}}]\), the following hold:
and
Moreover, if \(\rho (a) = 0\), then \({}^{\text {CF}}I_{a;w}^{\mu ;\psi } {}^{\text {CF}}D_{a;w}^{\mu ;\psi } \rho (x) = \rho (x)\).
Lemma 2
(29) Let \(0< \mu < 1\) and \(p \in AC(\mho , {\mathbb {R}})\) with \(f(a) = 0\). Then, the following FDE:
has a unique solution
Theorem 1
(Banach fixed-point theorem) Let \(X\) be a Banach space, and let \(T: X \rightarrow X\) be a contraction mapping. Then, \(T\) has a unique fixed point \(x^* \in X\), i.e., \(T(x^*) = x^*\).
Theorem 2
(Krasnoselskii fixed-point theorem) Let S be a closed, convex, bounded, nonempty subset of a Banach space X. If operators \(A, B: S \rightarrow X\) satisfy: 1) \(A u + B v \in S\) for all \(u, v \in S\), 2) A is a contraction, 3) B is continuous and B(S) is relatively compact, then \(T = A + B\) has a fixed point in S.
Theorem 3
(Schauder Fixed-Point Theorem) Let \(X\) be a Banach space, and let \(K \subset X\) be a nonempty, closed, convex, and compact subset. If \(T : K \rightarrow K\) is a continuous mapping, then \(T\) has at least one fixed point in \(K\).
Theorems 1-3 are well-known classical results that can be found in numerous books.
Main results
In this section, we use the fixed-point theorems of Banach, Krasnoselskii, and Schauder to establish theorems on the existence, uniqueness, Ulam-Hyers stability, and controllability of the proposed system (2). Initially, as explained in the subsequent steps, we obtain the system’s equivalent integral formulation (2).
Step 1: single-term case
Consider a single fractional derivative equation:
Applying the \([\psi , w]\)-Caputo-Fabrizio fractional integral \({}^{\text {CF}}I_{a;w}^{\mu _{ij};\psi }\) and using Lemma 2, we obtain
where \(a_{\mu _{ij}} = \frac{1 - \mu _{ij}}{{\mathscr {N}}(\mu _{ij})}\), \(b_{\mu _{ij}} = \frac{\mu _{ij}}{{\mathscr {N}}(\mu _{ij})}\).
Step 2: multi-term case
For the i-th equation with multiple fractional derivatives:
where \({\mathscr {D}}(x) = \left( \sum _{j=1}^{m_k} \alpha _{kj} {}^{\text {CF}}D_{a;w}^{\mu _{kj};\psi } \rho _k(x) \right) _{k=1,\ldots ,n}\). Applying the fractional integral with a representative order \(\mu _i^*\) (e.g., \(\mu _{i1}\)), we obtain
where \(a_{\mu _i^*} = \frac{1 - \mu _i^*}{{\mathscr {N}}(\mu _i^*)}\), \(b_{\mu _i^*} = \frac{\mu _i^*}{{\mathscr {N}}(\mu _i^*)}\).
Step 3: vector form
We consider a generalized system of n coupled FDEs with multi-term \([\psi , w]\)-Caputo-Fabrizio fractional derivatives:
where \({\mathscr {P}}(x) = (\rho _1(x), \ldots , \rho _n(x))^T \in C[\mho , {\mathbb {R}}^n]\), \(0< \mu _{ij} < 1\), \(\alpha _{ij} \in {\mathbb {R}}\), \(\vartheta _i: \mho \times {\mathbb {R}}^n \times {\mathbb {R}}^{n \cdot m} \rightarrow {\mathbb {R}}\), \(m = \max \{m_1, \ldots , m_n\}\), \(c_i \in {\mathbb {R}}\), \(g_i: C[\mho , {\mathbb {R}}^n] \rightarrow {\mathbb {R}}\), and \(w, \psi \in C^1(\mho )\) with \(w, w', \psi ' > 0\). The equivalent integral equation is:
where \(C = (c_1, \ldots , c_n)^T\), \(g({\mathscr {P}}) = (g_1({\mathscr {P}}), \ldots , g_n({\mathscr {P}}))^T\), \(\Phi (x,{\mathcal{P}}(x),{\mathcal{D}}(x)) = (\vartheta _{1} (x,{\mathcal{P}}(x),{\mathcal{D}}(x)),\)\(\ldots ,\vartheta _{n} (x,{\mathcal{P}}(x),{\mathcal{D}}(x)))^{T}\), \(a_Y = \text {diag}(a_{\mu _1^*}, \ldots , a_{\mu _n^*})\), \(b_Y = \text {diag}(b_{\mu _1^*}, \ldots , b_{\mu _n^*})\), \(a_{\mu _i^*} = \frac{1 - \mu _i^*}{{\mathscr {N}}(\mu _i^*)}\), \(b_{\mu _i^*} = \frac{\mu _i^*}{{\mathscr {N}}(\mu _i^*)}\), and \({\mathscr {D}}(x) = \left( \sum _{j=1}^{m_k} \alpha _{kj} {}^{\text {CF}}D_{a;w}^{\mu _{kj};\psi } \rho _k(x) \right) _{k=1,\ldots ,n}\).
The following assumptions will be used in the analysis that follows.
-
(H1)
For \(w, \psi \in C^1(\mho )\) with \(w(x), w'(x), \psi '(x) > 0\) for all \(x \in \mho\), there exist \(w_{\text {min}},M_{\psi '}, M_w > 0\) such that \(w(x) \ge w_{\text {min}}\), \(\sup _{x \in \mho } \psi '(x) \le M_{\psi '}\) and \(\sup _{x \in \mho } w(x) \le M_w\).
-
(H2)
\(\Phi : \mho \times {\mathbb {R}}^n \times {\mathbb {R}}^n \rightarrow {\mathbb {R}}^n\) is continuous and there exists \(L_\Phi > 0\) such that
$$\Vert \Phi (x, {\textbf{u}}_1, {\textbf{v}}_1) - \Phi (x, {\textbf{u}}_2, {\textbf{v}}_2)\Vert _{{\mathbb {R}}^n} \le L_\Phi \left( \Vert {\textbf{u}}_1 - {\textbf{u}}_2\Vert _{{\mathbb {R}}^n} + \Vert {\textbf{v}}_1 - {\textbf{v}}_2\Vert _{{\mathbb {R}}^n} \right) .$$ -
(H3)
\(g: C[\mho , {\mathbb {R}}^n] \rightarrow {\mathbb {R}}^n\) is continuous and there exists \(L_g > 0\) such that
$$\Vert g({\mathscr {P}}_1) - g({\mathscr {P}}_2)\Vert _{{\mathbb {R}}^n} \le L_g \Vert {\mathscr {P}}_1 - {\mathscr {P}}_2\Vert _C.$$ -
(H4)
\(0< \mu _{ij} < 1\), \({\mathscr {N}}(\mu _{ij}) \le M_{{\mathscr {N}}} < \infty\), \(\mu _{ij} \le \mu _{\text {max}} < 1\).
-
(H5)
\(\Phi : \mho \times {\mathbb {R}}^n \times {\mathbb {R}}^n \rightarrow {\mathbb {R}}^n\) is continuous and bounded: \(\Vert \Phi (x, {\textbf{u}}, {\textbf{v}})\Vert _{{\mathbb {R}}^n} \le M_\Phi\).
-
(H6)
\(g: C[\mho , {\mathbb {R}}^n] \rightarrow {\mathbb {R}}^n\) is continuous and bounded: \(\Vert g({\mathscr {P}})\Vert _{{\mathbb {R}}^n} \le M_g\).
Now, we provide some lemmas to help prove our upcoming results.
Lemma 3
Under (H1) and (H4), \({\mathscr {D}}(x) = \left( \sum _{j=1}^{m_k} \alpha _{kj} {}^{\text {CF}}D_{a;w}^{\mu _{kj};\psi } \rho _k(x) \right) _{k=1,\ldots ,n}\) is well-defined for \({\mathscr {P}} \in C[\mho , {\mathbb {R}}^n]\) with \(\rho _k \in AC[\mho , {\mathbb {R}}]\).
Proof
For each k, we have
Since \(\rho _k \in AC[\mho , {\mathbb {R}}]\), \(w \in C^1(\mho )\), \(w \rho _k \in AC[\mho , {\mathbb {R}}]\), so \(\frac{d}{d\zeta } (w \rho _k)(\zeta ) = w'(\zeta ) \rho _k(\zeta ) + w(\zeta ) \rho _k'(\zeta )\) exists almost everywhere and is integrable. By (H1), \(w(x) > 0\), \(\psi '(\zeta ) > 0\), so \(\psi (x) - \psi (\zeta ) \ge 0\) for \(\zeta \le x\), and \(e^{-\lambda _{\mu _{kj}} (\psi (x) - \psi (\zeta ))} \le 1\). By (H4), \({\mathscr {N}}(\mu _{kj}) < \infty\), \(0< \mu _{kj} < 1\). For integrability, since \(\rho _k \in AC[\mho , {\mathbb {R}}]\), \(\rho _k' \in L^1(\mho )\). Also, \(w, w' \in C[\mho , {\mathbb {R}}]\), so
Since \(\rho _k \in C[\mho , {\mathbb {R}}]\), \(|\rho _k(\zeta )| \le \Vert \rho _k\Vert _C\), and \(\int _a^x |\rho _k'(\zeta )| d\zeta < \infty\). Thus, the integrand is in \(L^1[a, x]\), and the integral is finite. For continuity, the kernel \(e^{-\lambda _{\mu _{kj}} (\psi (x) - \psi (\zeta ))}\) is continuous, and \(\frac{1}{w(x)}\) is continuous by (H1). Thus, the integral is a continuous function. Hence, \({}^{\text {CF}}D_{a;w}^{\mu _{kj};\psi } \rho _k(x) \in C[\mho , {\mathbb {R}}]\), and \({\mathscr {D}}(x) \in C[\mho , {\mathbb {R}}^n]\). \(\square\)
Lemma 4
Under (H1) and (H4), the operator \({}^{\text {CF}}D_{a;w}^{\mu ;\psi }: AC[\mho , {\mathbb {R}}] \rightarrow C[\mho , {\mathbb {R}}]\) is Lipschitz continuous.
Proof
For \(\rho _1, \rho _2 \in AC[\mho , {\mathbb {R}}]\), we have
Since \(\frac{d}{d\zeta } (w \rho _i) = w' \rho _i + w \rho _i'\), we have:
For \(\rho _1, \rho _2 \in C[\mho , {\mathbb {R}}]\), we obtain
Since \(\rho _i \in AC[\mho , {\mathbb {R}}]\), \(\rho _i' \in L^1(\mho )\). Assume \(\rho _i\) are differentiable a.e. with \(\rho _i' \in L^\infty (\mho )\), or approximate in \(C[\mho , {\mathbb {R}}]\). For simplicity, we ignore the term \(\rho _i'\) for the bound,
Also, since \(e^{-\lambda _\mu (\psi (x) - \psi (\zeta ))} \le 1\), \(w(x) \ge w_{\text {min}}\), \({\mathscr {N}}(\mu ) \le M_{{\mathscr {N}}}\) and \(\mu \le \mu _{\text {max}} < 1\), we have
For \({\mathscr {D}}(x)\), we have
where \(K_D = \frac{M_{{\mathscr {N}}} M_{w'} (b - a)}{(1 - \mu _{\text {max}}) w_{\text {min}}}\) and \(L_D = K_D \sum _{k=1}^n \sum _{j=1}^{m_k} |\alpha _{kj}|\). \(\square\)
Uniqueness theorem
Theorem 4
Assume that assumptions (H1)-(H4) are satisfied. If
then system (2) admits a unique solution in the space \(X:=C[\mho , {\mathbb {R}}^n]\).
Proof
Define the operator \(T: X \rightarrow X\) by
The solution \({\mathscr {P}}(x)\) is a fixed point of T, i.e., \(T{\mathscr {P}} = {\mathscr {P}}\).
By Lemma 3, \({\mathscr {D}}(x)\) is well-defined. Moreover, for any \({\mathscr {P}}_1, {\mathscr {P}}_2 \in X\), it follows from Lemma 4 together with assumptions (H1)-(H4) that
which implies
Since \(K < 1\), T is a contraction. Therefore, by Theorem 1, there exists a unique fixed point \({\mathscr {P}} \in X\) that satisfies (3), and consequently (2). \(\square\)
Existence theorem
Theorem 5
Assume that (H1)-(H6) hold, there exists at least one solution to (2) in X, provided that \(\frac{w(a)}{w_{\text {min}}} L_g < 1\).
Proof
Let \(S = B_R = \{ {\mathscr {P}} \in X \mid \Vert {\mathscr {P}}\Vert _C \le R \}\), a closed, convex, bounded, nonempty subset of X. Choose R such that:
We decompose \(T = A + B\), where
Then, we present the proof in the following steps:
Step 1: A is a contraction.
For \({\mathscr {P}}_1, {\mathscr {P}}_2 \in S\):
Thus:
By assumption, \(\frac{w(a)}{w_{\text {min}}} L_g < 1\), so A is a contraction.
Step 2: B is continuous.
For \({\mathscr {P}}_n \rightarrow {\mathscr {P}}\) in X,
By (H2), \(\Phi\) is continuous. By Lemma 4, \({\mathscr {D}}\) is continuous (as \({\mathscr {P}}_n \rightarrow {\mathscr {P}}\) implies \({\mathscr {D}}_n \rightarrow {\mathscr {D}}\)). The integral is continuous in \({\mathscr {P}}\) by the dominated convergence theorem, as \(\Phi\) is bounded. Thus, B is continuous.
Step 3: B(S) is relatively compact.
By Arzelà-Ascoli, we need B(S) to be uniformly bounded and equicontinuous.
First, by assumptions (H1) and (H5), we have
Thus, B(S) is bounded. Next, for \(x_1, x_2 \in \mho\), \(x_1 < x_2\):
Since \(\Phi\) and \({\mathscr {D}}\) are continuous, the first term vanishes as \(x_2 \rightarrow x_1\). For the second term:
As \(x_2 \rightarrow x_1\), both terms vanish, so B(S) is equicontinuous. Thus, B(S) is relatively compact.
Step 4: \(A u + B v \in S\) for \(u, v \in S\). For \(u, v \in B_R\),
Since \(\Vert g(u)\Vert \le L_g \Vert u\Vert _C + \Vert g(0)\Vert \le L_g R + M_g\), choose R such that:
It follows that
Since \(\frac{w(a)}{w_{\text {min}}} L_g < 1\), such an R exists, ensuring \(A u + B v \in B_R\).
Applying Theorem 2 guarantees that \(T = A + B\) has a fixed point in S, i.e., a solution to (3), hence (2). \(\square\)
Ulam-Hyers stability theorem
We adopt the definition of Ulam–Hyers stability for the fractional-order system (2) as given by Rus35.
Definition 3
The system (2) is Ulam-Hyers stable if there exists a constant \({\mathcal {C}} > 0\) such that, for every \(\varepsilon > 0\) and \({\mathscr {Q}} \in C[\mho , {\mathbb {R}}^n]\) with \(\rho _{Q,i} \in AC[\mho , {\mathbb {R}}]\) satisfying:
there exists a solution \({\mathscr {P}} \in C[\mho , {\mathbb {R}}^n]\) of (2) such that:
Theorem 6
Under the conditions of Theorem 4, the system (2) is Ulam-Hyers stable.
Proof
Let \({\mathscr {Q}} \in C[\mho , {\mathbb {R}}^n]\), \(\rho _{Q,i} \in AC[\mho , {\mathbb {R}}]\), satisfy:
where \({\mathscr {D}}_Q(x) = \left( \sum _{j=1}^{m_k} \alpha _{kj} {}^{\text {CF}}D_{a;w}^{\mu _{kj};\psi } \rho _{Q,k}(x) \right) _{k=1,\ldots ,n}\). Let \({\mathscr {P}}\) be the unique solution of (2), i.e., \({\mathscr {P}} = T {\mathscr {P}}\), guaranteed by Theorem 4.
Applying the fractional integral \({}^{\text {CF}}I_{a;w}^{\mu _{ij};\psi }\) to the approximate equation:
Using the previous results, the integral equation for \(\rho _{Q,i}\) is:
Since \(\rho _{Q,i}(a) = c_i + g_i({\mathscr {Q}}) + \delta _i\), \(|\delta _i| \le \varepsilon\), the integral equation becomes:
where \(\Delta = (\delta _1, \ldots , \delta _n)^T\), \(\Vert \Delta \Vert _{{\mathbb {R}}^n} \le \sqrt{n} \varepsilon\), \(\eta = (\eta _1, \ldots , \eta _n)^T\), \(\Vert \eta (x)\Vert _{{\mathbb {R}}^n} \le \sqrt{n} \varepsilon\).
To estimate \(\Vert {\mathscr {Q}} - T {\mathscr {Q}}\Vert _C\). we have
which implies
It follows that
where \(K_\varepsilon = \sqrt{n} \left[ \frac{w(a)}{w_{\text {min}}} + \max _i |a_{\mu _i^*}| + \frac{\max _i |b_{\mu _i^*}| M_{\psi '} M_w (b - a)}{w_{\text {min}}} \right]\).
Since \({\mathscr {P}} = T {\mathscr {P}}\), and T is a contraction from Theorem 4, then
which implies,
Since \(K < 1\), we obtain
where
Thus, the system (2) is Ulam-Hyers stable. \(\square\)
Controllability results
Controllability, which permits state transitions under appropriate controls, is essential to the analysis of fractional-order systems. Early results on controllability and observability for systems with control delays were presented by Bettayeb and Djennoune31, and Wei32 followed suit. The analysis was expanded to include systems with impulses and state delays by Zhang et al.33, and combined state and control delays were examined by Nawaz et al.34. Our current findings are based on these works. Here, we analyze the controllability of the system (2).
Definition 4
Controllability of the system means the existence of a control \(u(x) \in C[\mho , {\mathbb {R}}^p]\) such that the system can be steered from the initial state \({\mathscr {P}}(a) = C + g({\mathscr {P}})\) to the desired final state \({\mathscr {P}}(b) = {\mathscr {P}}_b \in {\mathbb {R}}^n\).
To include control in the model, we reformulate the integral equation accordingly. Specifically, we assume
where \(f: \mho \times {\mathbb {R}}^n \times {\mathbb {R}}^n \rightarrow {\mathbb {R}}^n\) represents the nonlinear dynamics, \(B \in {\mathbb {R}}^{n \times p}\) is the control matrix, and \(u: \mho \rightarrow {\mathbb {R}}^p\) is the control function. The system (2) becomes:
with \(\rho _i(a) = c_i + g_i(\rho _1, \ldots , \rho _n)\), where \(B_i\) is the i-th row of B.
To derive the integral equation, apply \({}^{\text {CF}}I_{a;w}^{\mu _{i}^;\psi }\) to both sides of (5). For simplicity, assume each equation has a single order \(\mu _i\) (e.g., \(m_i = 1\)); multi-term cases follow by linearity. Hence
Applying \({}^{\text {CF}}I_{a;w}^{\mu _i^*;\psi }\), we use Lemma 1. Thus
Substitute \(\rho _i(a) = c_i + g_i({\mathscr {P}})\) and the definition of \({}^{\text {CF}}I_{a;w}^{\mu _i^*;\psi }(\cdot )\). Thus
In vector form, with \({\mathscr {P}}(x) = (\rho _1(x), \ldots , \rho _n(x))^T\), \(f = (f_1, \ldots , f_n)^T\), \(C = (c_1, \ldots , c_n)^T\), \(g({\mathscr {P}}) = (g_1({\mathscr {P}}), \ldots , g_n({\mathscr {P}}))^T\), \(a_Y = \text {diag}(a_{\mu _1^*}, \ldots , a_{\mu _n^*})\), \(b_Y = \text {diag}(b_{\mu _1^*}, \ldots , b_{\mu _n^*})\), where \(a_{\mu _i^*} = \frac{1 - \mu _i^*}{{\mathscr {N}}(\mu _i^*)}\), \(b_{\mu _i^*} = \frac{\mu _i^*}{{\mathscr {N}}(\mu _i^*)}\), we obtain
At \(x = b\), the target condition is
Case 1: Nonlinear system.
We use Schauder's fixed point theorem to establish controllability for the nonlinear system.
Theorem 7
Under assumptions (H1), (H2), (H3), (H5), and (H6), and assuming \(B \in {\mathbb {R}}^{n \times n}\) is invertible, the system (5) is controllable on \(\mho\). That is, for any initial state \({\mathscr {P}}(a) = C + g({\mathscr {P}})\) and any desired final state \({\mathscr {P}}_b \in {\mathbb {R}}^n\), there exists a control \(u \in C[\mho , {\mathbb {R}}^n]\) such that the solution \({\mathscr {P}}(x)\) satisfies \({\mathscr {P}}(b) = {\mathscr {P}}_b\).
Proof
Define the Banach space \(X = C[\mho , {\mathbb {R}}^n]\) with the sup norm \(\Vert {\mathscr {P}}\Vert _X = \sup _{x \in \mho } \Vert {\mathscr {P}}(x)\Vert _{{\mathbb {R}}^n}\). We construct an operator \({\mathcal {T}}: X \rightarrow X\) and a control u(x) to achieve \({\mathscr {P}}(b) = {\mathscr {P}}_b\).
Step 1: We define the control. From (7), solve for u(b):
Since B is invertible and \(a_Y\) is a diagonal matrix with positive entries (\(a_{\mu _i^*} = \frac{1 - \mu _i^*}{{\mathscr {N}}(\mu _i^*)} > 0\)), \(a_Y B\) is invertible. The control is
for \(x \in \mho\). This is a constant control, but we extend it to \(C[\mho , {\mathbb {R}}^n]\) by continuity.
Step 2: We define the operator. Substitute u(x) into (6), we get
We need \({\mathcal {T}} {\mathscr {P}} = {\mathscr {P}}\) with \({\mathscr {P}}(b) = {\mathscr {P}}_b\). Define the set \({\mathcal {B}}_r = \{ {\mathscr {P}} \in X : \Vert {\mathscr {P}}\Vert _X \le r \},\) for some \(r > 0\) to be determined.
Step 3: We show \({\mathcal {T}}\) maps \({\mathcal {B}}_r\) into itself. To estimate \({\mathcal {T}} {\mathscr {P}}\), we have
where \(\Vert a_Y\Vert \le \max _i \frac{1 - \mu _i^*}{{\mathscr {N}}(\mu _i^*)} \le \frac{1}{{\mathscr {N}}_{\text {min}}}\), \(\left\| \frac{b_Y}{w(x)} \right\| \le \frac{\max _i \mu _i^*}{{\mathscr {N}}_{\text {min}} w_{\text {min}}} \le \frac{\mu _{\text {max}}}{{\mathscr {N}}_{\text {min}} w_{\text {min}}}\), \({\mathscr {N}}_{\text {min}} = \min _i {\mathscr {N}}(\mu _i^*)\) and \(\Vert f(x, {\mathscr {P}}(x), {\mathscr {D}}(x))\Vert \le M_\Phi\).
Now, we estimate u(x):
Choose r large enough to bound all terms, ensuring \({\mathcal {T}}: {\mathcal {B}}_r \rightarrow {\mathcal {B}}_r\).
Step 4: We show \({\mathcal {T}}\) is continuous. For \({\mathscr {P}}_1, {\mathscr {P}}_2 \in X\):
Thus, \({\mathcal {T}}\) is Lipschitz continuous, hence continuous.
Step 5: Finally, we show \({\mathcal {T}}\) is compact. The set \({\mathcal {T}}({\mathcal {B}}_r)\) is bounded (from Step 3). Equicontinuity follows from the continuity of \(w, \psi ', f\), and the exponential kernel in \({\mathscr {D}}(x)\). By the Arzelà-Ascoli theorem, \({\mathcal {T}}({\mathcal {B}}_r)\) is precompact.
Since \({\mathcal {B}}_r\) is closed, convex, and bounded, and \({\mathcal {T}}\) is continuous and compact, Schauder’s fixed point theorem ensures a fixed point \({\mathscr {P}} \in {\mathcal {B}}_r\) such that \({\mathcal {T}} {\mathscr {P}} = {\mathscr {P}}\), with \({\mathscr {P}}(b) = {\mathscr {P}}_b\) due to the control u(x).
Thus, the system is controllable. \(\square\)
Case 2: Linear system.
For the linear system, we assume \(\vartheta _i(x, {\mathscr {P}}, {\mathscr {D}}) = A_i {\mathscr {P}}(x) + D_i {\mathscr {D}}(x) + B_i u(x)\), \(g({\mathscr {P}}) = 0\), where \(A_i, D_i\) are rows of matrices \(A, D \in {\mathbb {R}}^{n \times n}\), \(B_i\) is the i-th row of \(B \in {\mathbb {R}}^{n \times n}\), and \(u(x) \in {\mathbb {R}}^n\) is the control. The system becomes:
where \({\mathscr {D}}(x) = \left( \sum _{j=1}^{m_k} \alpha _{kj} {}^{\text {CF}}D_{a;w}^{\mu _{kj};\psi } \rho _k(x) \right) _{k=1,\ldots ,n}\). The integral equation is:
Now, we prove controllability using the controllability Grammian.
Theorem 8
Under assumptions (H1), (H4), and (H6), and assuming \(B \in {\mathbb {R}}^{n \times n}\) is invertible, the linear system (8) is controllable on \(\mho\) if the controllability Grammian:
is invertible.
Proof
Step 1: We define the controllability Grammian.
From the integral equation (9) at \(x = b\):
By isolating control conditions:
Putting
Now, we need a control u(x) such that
We suggest controlling by
From the controllability Grammian, we solve for the integral term involving u:
So, the control is
Step 2: Verify reversibility of W(a, b).
For matrix \(B B^T\), since \(B \in {\mathbb {R}}^{n \times n}\) is invertible, \(B B^T\) is symmetric and positive definite. For any \(0\ne v \in {\mathbb {R}}^n\), we have
Thus, \(B B^T\) has positive eigenvalues.
The matrix \(b_Y = \text {diag}(b_{\mu _1^*}, \ldots , b_{\mu _n^*})\), where \(b_{\mu _i^*} = \frac{\mu _i^*}{{\mathscr {N}}(\mu _i^*)}\). By (H1) and (H4), Thus, \(w(b) > 0\) and \(b_{\mu _i^*} > 0\), i.e., the matrix \(\frac{b_Y}{w(b)}\) is diagonal with positive entries \(\frac{b_{\mu _i^*}}{w(b)} > 0\). Hence, \(\frac{b_Y}{w(b)}\) is positive definite. Also, the integrand \(\psi '(\zeta ) w(\zeta ) \left( \frac{b_Y}{w(b)} \right) B B^T \left( \frac{b_Y}{w(b)} \right) ^T\) is a matrix-valued function. By (H1), \(\psi '(\zeta ) > 0\) and \(w(\zeta ) > 0\), \(\psi '(\zeta ) w(\zeta ) > 0\) for all \(\zeta \in \mho\). For any \(0\ne v \in {\mathbb {R}}^n\),
Since \(B^T\) and \(\frac{b_Y}{w(b)}\) are invertible, \(\left( \frac{b_Y}{w(b)} \right) ^T v \ne 0\) for \(v \ne 0\), and \(B^T\) maps it to a non-zero vector. Thus, the matrix \(\left( \frac{b_Y}{w(b)} \right) B B^T \left( \frac{b_Y}{w(b)} \right) ^T>0\). Finally, the integral W(a, b) is defined as a Riemann integral of a matrix-valued function that is continuous and positive definite on the interval over \(\mho\). For any \(0\ne v \in {\mathbb {R}}^n\):
Since \(\psi '(\zeta ) w(\zeta ) > 0\) and \(\left\| B^T \left( \frac{b_Y}{w(b)} \right) ^T v \right\| _2^2 > 0\) for \(v \ne 0\), and the interval \(\mho\) has positive measure (\(b > a\)), \(v^T W(a, b) v > 0\).
Thus, W(a, b) is positive definite and hence invertible.
Step 3: Show that \({\mathscr {P}}(b)={\mathscr {P}}_b\).
Substitute the control (10) into the integral equation (9) at \(x = b\):
Since u(x) is constant over \(\mho\), \(u(b) = u(x)\). Substitute u(b):
Hence,
Recognize that:
Thus:
So:
Then:
Substitute into the integral equation:
The control terms contribute:
Since u(b) is designed to satisfy \(\xi = a_Y B u(b) + \frac{b_Y}{w(b)} \int _a^b \psi '(\zeta ) w(\zeta ) B u(\zeta ) d\zeta\), and we have:
This makes \(a_Y B u(b)=0\). Instead, we rewrite (11) as follows:
Since
we get
Thus, the control u(x) ensures \({\mathscr {P}}(b) = {\mathscr {P}}_b\). The invertibility of W(a, b) guarantees a unique u(x) for any \({\mathscr {P}}_b\), as \(\xi\) is uniquely determined by \({\mathscr {P}}_b\). Therefore, the system is controllable. \(\square\)
Special cases
In this section, the generalized coupled system (2) is thoroughly analyzed. Special cases are addressed, the system’s structural characteristics and their implications are highlighted, and some key points are noted. The system (2) generalizes several important cases through appropriate choices of parameters:
-
(a)
Single equation (\(n = 1\)): The system (2) reduces to
$$\sum _{j=1}^{m_1} \alpha _{1j} ^{\text {CF}}D_{a;w}^{\mu _{1j}; \psi } \rho _1(x) = \vartheta _1\left( x, \rho _1(x), ^{\text {CF}}D_{a;w}^{\mu _{1j}; \psi } \rho _1(x)\right) ,$$$$\rho _1(a) = c_1 + g_1(\rho _1).$$For \(m_1 = 1\), \(w(x) = 1\), \(\psi (x) = x\), it becomes a standard Caputo-Fabrizio equation.
-
(b)
Single-term derivative (\(m_i = 1\)): Each equation has one derivative
$$\alpha _{i1} ^{\text {CF}}D_{a;w}^{\mu _{i1}; \psi } \rho _i(x) = \vartheta _i\left( x, \rho _1(x), \ldots , \rho _n(x), ^{\text {CF}}D_{a;w}^{\mu _{11}; \psi } \rho _1(x), \ldots , ^{\text {CF}}D_{a;w}^{\mu _{n1}; \psi } \rho _n(x)\right) .$$This simplifies the operator \({\mathscr {D}}(x)\).
-
(c)
Standard Caputo-Fabrizio derivative (\(w(x) = 1\), \(\psi (x) = x\)): The derivative is
$$^{\text {CF}}D_{a}^{\mu _{ij}} \rho _i(x) = \frac{{\mathscr {N}}(\mu _{ij})}{1 - \mu _{ij}} \int _a^x e^{-\frac{\mu _{ij}}{1 - \mu _{ij}} (x - \zeta )} \rho _i'(\zeta ) d\zeta .$$ -
(d)
Non-fractional case (\(\mu _{ij} \rightarrow 1^-\)): The system (2) approximates
$$\sum _{j=1}^{m_i} \alpha _{ij} \rho _i'(x) \approx \vartheta _i(x, \rho _1(x), \ldots , \rho _n(x), \rho _1'(x), \ldots , \rho _n'(x)).$$ -
(e)
Linear \(\vartheta _i\) and \(g_i\): If \(\vartheta _i(x, u, v) = A_i u + B_i v + f_i(x)\), or \(\vartheta _i(x, {\mathscr {P}}, {\mathscr {D}}) = \sum _{k=1}^n a_{ik} \rho _k(x) + \sum _{k=1}^n b_{ik} {\mathscr {D}}_k(x)\) and \(g_i({\mathscr {P}}) = G_i {\mathscr {P}}\), the system (2) is linear.
-
(f)
No nonlocal condition (\(g_i = 0\)): Initial conditions become \(\rho _i(a) = c_i\).
-
(g)
Uncoupled system: If \(\vartheta _i\) depends only on \(\rho _i\) and its derivatives, then the system reduces to a set of uncoupled equations.
Remark 1
The following observations highlight key aspects and limitations of system (2):
-
(a)
System (2) is applicable to physics and biology applications because it captures a broad range of phenomena involving memory effects (through fractional derivatives), coupling between multiple components, and nonlocal influences (through the functions \(g_i\)).
-
(b)
Weighted dynamics and non-standard time scale modeling are made possible by \(\psi\) and \(w\). The associated operators are guaranteed to be well-defined and analytically tractable by the conditions \(w > 0\), \(w' > 0\), and \(\psi ' > 0\).
-
(c)
Lipschitz conditions: These presumptions are necessary to prove stability and uniqueness. Although it usually comes at the expense of losing individuality, relaxing them might still ensure existence.
-
(d)
Limitations of the analysis include the use of Lipschitz-type conditions, strictly positive weights, and the case \(0< \mu _{ij} < 1\).
An example
This part provides an example to demonstrate the applicability of the main results.
Example 1
Consider the system with \(n = 2\), \(m_1 = m_2 = 1\) over \(\mho = [0, 1]\):
with \(w(x) = 1 + x\), \(\psi (x) = x^2\), \(\mu _{11} = 0.6\), \(\mu _{21} = 0.7\), \({\mathscr {N}}(\mu ) = 1\), \(c_1 = c_2 = 0\), where \({\mathscr {D}}(x) = ({}^{\text {CF}}D_{0;w}^{0.6;x^2} \rho _1(x), {}^{\text {CF}}D_{0;w}^{0.7;x^2} \rho _2(x))^T\), \(a_Y = \text {diag}(0.4, 0.3)\), \(b_Y = \text {diag}(0.6, 0.7)\).
For uniqueness result (Theorem 4):
(H1) \(w(x) = 1 + x\), \(w' = 1\), \(\psi (x) = x^2\), \(\psi ' = 2x\), so \(w_{\text {min}} = 1\), \(M_w = 2\), \(M_{w'} = 1\), \(M_{\psi '} = 2\), \(w(0) = 1\), \(\mu _{\text {max}} = 0.7\).
(H2) \(\Phi (x, {\textbf{u}}, {\textbf{v}}) = \left( \frac{1}{10} \sin (u_1) + \frac{1}{20} u_2^2 + \frac{1}{15} v_1 + \frac{1}{30} v_2, \frac{1}{20} u_1^2 + \frac{1}{10} \sin (u_2) + \frac{1}{30} v_1 + \frac{1}{15} v_2 \right)\). For \({\textbf{u}}_1, {\textbf{u}}_2, {\textbf{v}}_1, {\textbf{v}}_2 \in {\mathbb {R}}^2\):
Assume \(R = 1\):
Thus, \(L_\Phi \approx \sqrt{2} \left( \frac{1}{10} + \frac{2}{20} + \frac{1}{15} + \frac{1}{30} \right) \approx \sqrt{2} \cdot 0.283 \approx 0.401\). Also, for \({\mathscr {D}}(x)\), we have \(K_D \approx 3.333\), so \(L_D \approx 6.666\).
(H3) \(g({\mathscr {P}}) = \left( \frac{1}{100} \int _0^1 \sin (\rho _1(s) + \rho _2(s)) ds, \frac{1}{100} \int _0^1 \cos (\rho _1(s) + \rho _2(s)) ds \right)\). For \({\mathscr {P}}_1, {\mathscr {P}}_2 \in B_1\),
Thus, \(L_g \approx \sqrt{2} \cdot \frac{1}{100} \approx 0.0141\).
(H4) \(\mu _{\text {max}} = 0.7\), \(M_{{\mathscr {N}}} = 1\).
Thus, all assumptions of Theorem 4 hold with \(K \approx 0.998 < 1\).
For existence result (Theorem 5):
(H5) \(\sin (u_i)\), \(u_i^2\), and linear terms are continuous. For boundedness,
(H6) The integral is continuous, and
Thus, all assumptions of Theorem 5 hold with \(\frac{w(0)}{w_{\text {min}}} L_g \approx 0.01414 < 1\), and \(R \approx 0.01434\).
For Ulam-Hyers stability (Theorem 6):
Since all assumptions of Theorem 4 hold with \(K \approx 0.998 < 1\), then
This verifies Theorem 6.
Application
The system models the dynamics of a susceptible (\(\rho _1\)), infected (\(\rho _2\)), and recovered (\(\rho _3\)) population over time \(x \in [0, 100]\) days, using the \([\psi , w]\)-Caputo-Fabrizio fractional derivative:
where \(\beta\) is the transmission rate (infections per contact per day), \(\gamma\) is the recovery rate (recoveries per day), \(\mu _1 , \mu _2, \mu _3\) are fractional orders for memory effects, \(w(x) = e^{kx}\) is the weight function for population density, \(\psi (x) = x\), so \(\psi '(x) = 1\) is linear time-scaling, and \({\mathscr {N}}(\mu _i) = 1\) is the normalization function.
In the epidemiological model, we set \(g_i = 0\) (i.e., \(g({\mathscr {P}}) = (0, 0, 0)^T\)), so the initial conditions simplify to:
Usually, the initial conditions are quantifiable and known, like the population fractions at time \(t = 0\). Setting \(g_i = 0\) is in line with conventional SIR models, which explicitly specify each compartment’s initial state.
This model’s main goal is to investigate fractional dynamics and the behavior of disease transmission. \(g_i = 0\) was chosen to keep the model tractable because adding intricate functional dependencies to the initial condition would make the numerical implementation more difficult without appreciably improving the insights.
Numerical simulation and results
The nonlinear nature of the model (13) makes it analytically intractable, and thus, obtaining an exact solution is not feasible. Consequently, we employ numerical techniques to approximate its solution. Specifically, we adopt the adapted Newton polynomial approximation method36 with an Adams-Bashforth integration scheme for the fractional integral term. Numerical simulations are then carried out based on these approximations, with the corresponding results summarized in Table 1. All codes and simulations were implemented in MATLAB R2019b to demonstrate and validate the numerical findings.
Now, we rewrite the model (13) using the equivalent integral equation:
where \({\mathscr {P}}(x) = (\rho _1(x), \rho _2(x), \rho _3(x))^T\), \(C = (\rho _1(0), \rho _2(0), \rho _3(0))^T\), \(\Phi (x,{\mathcal{P}}(x)) =\)\(( - \beta \rho _{1} \rho _{2} ,\beta \rho _{1} \rho _{2} - \gamma \rho _{2} ,\gamma \rho _{2} )^{T}\), \(a_Y =\)\(\text {diag}\left( \frac{1 - \mu _1}{{\mathscr {N}}(\mu _1)}, \frac{1 - \mu _2}{{\mathscr {N}}(\mu _2)}, \frac{1 - \mu _3}{{\mathscr {N}}(\mu _3)}\right)\), and \(b_Y =\)\(\text {diag}\left( \frac{\mu _1}{{\mathscr {N}}(\mu _1)}, \frac{\mu _2}{{\mathscr {N}}(\mu _2)}, \frac{\mu _3}{{\mathscr {N}}(\mu _3)}\right)\).
Defining \(Q(x) = {\mathscr {P}}(x) w(x)\), equation (14) transforms to:
Discretize with step size h, so \(x_n = n h\) and \({\mathscr {P}}(x_n) \approx {\mathscr {P}}^n\). Since \(\psi '(x) = 1\), approximate the integral using a three-point Adams-Bashforth method over \([x_{n-2}, x_{n+1}]\).
Beginning with the difference \(Q^{\,n+1} - Q^{\,n}\), we derive the recurrence relation for \({\mathscr {P}}^{\,n+1}\) as
Since \(Q^{n+1} = {\mathscr {P}}^{n+1} w(x_{n+1})\) and \(Q^n = {\mathscr {P}}^n w(x_n)\), we can express \({\mathscr {P}}^{n+1}\) as
Rearrange to obtain the implicit form, iterating with \({\mathscr {P}}^{n+1} \approx {\mathscr {P}}^n\): Rearranging yields the implicit form. Applying iteration \({\mathscr {P}}^{n+1} \approx {\mathscr {P}}^n\), we obtain the successive approximation scheme:
To carry out the simulation, we implement the numerical scheme detailed above to solve the fractional system (16). The model parameters used in the computation are selected based on the values listed in Table 1. At each discretized spatial point \(x_n+1\), the solution \({\mathscr {P}}(x_n+1) = \big (\rho _1(x_n+1), \rho _2(x_n+1), \rho _3(x_n+1)\big )\) is computed.
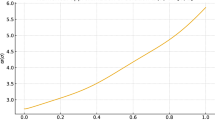
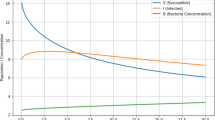
The dynamics of the three compartments-susceptible (\(\rho _1\)), infected (\(\rho _2\)) and recovered (\(\rho _3\)) over a period of [0, 100] days are shown in Fig. 1. The susceptible population \(\rho _1\) begins at 0.99 (99% of the population) and decreases monotonically as individuals become infected due to the term \(-\beta \rho _1 \rho _2\), with the curve smoothed by the fractional derivative of order \(\mu _1 = 0.9\), which captures memory effects in infection dynamics; the infected population \(\rho _2\), starting at 0.01, first rises to a peak as infections spread, then declines as individuals recover, governed by the expression \(\mu _2 = 0.85\) introducing a slower, more realistic evolution compared to classical models; the recovered population \(\rho _3\) begins at 0 and steadily increases according to the recovery term \(\gamma \rho _2\), with \(\mu _3 = 0.95\) modeling memory-dependent recovery dynamics such as delayed immunity effects.

Epidemiological model with \([\psi ,w]\)-Caputo-Fabrizio fractional derivatives with fractional orders \(\mu _1=0.9, \mu _2=0.85, \mu _3=0.95\) and \(w=e^{0.01x}, \psi (x)=x\).
Conclusion and future work
We have proposed and analyzed a generalized coupled system involving multi-term \([\psi , w]\)-Caputo-Fabrizio fractional derivatives with nonlinear and nonlocal initial conditions. By reformulating the system into an equivalent integral equation, we applied Banach’s and Krasnoselskii’s fixed point theorems to prove the existence and uniqueness of solutions. We also established the Ulam-Hyers stability of the system, providing robustness to small perturbations in initial data or nonlinear terms. In addition, we have proved the controllability of the proposed system in nonlinear and linear cases. The generality of the formulation enables it to encompass a wide range of classical and modern fractional differential systems. Special cases, such as those involving nonlinear kernels, non-Lipschitz dynamics, and variable fractional orders, were identified as promising future directions. The illustrative example further supports the validity and effectiveness of the main results. Finally, an epidemic case study was presented to illustrate the practical applicability and flexibility of the proposed model in real-world settings.
The current study opens several avenues for future research in the context of generalized fractional operators. Future work could specifically examine how to analyze multi-term coupled systems using recently developed fractional operators, such as the weighted fractional operator with respect to another function37 and other recent formulations involving Mittag–Leffler-type kernels38.
Data availability
All data generated or analyzed during this study are included in this published article.
References
Osler, T. J. Leibniz rule for fractional derivatives generalized and an application to infinite series. SIAM J. Appl. Math. 18(3), 658–674 (1970).
Kilbas, A. A., Srivastava, H. M. & Trujillo, J. J. Theory and Applications of Fractional Differential Equations (Elsevier B.V, Amsterdam, The Netherlands, 2006).
Samko, S. G., Kilbas, A. A. & Marichev, O. I. Fractional Integrals and Derivatives (Theory and Applications, Gordon and Breach, Amsterdam, 1993).
Diethelm, K. & Ford, N. J. Analysis of fractional diferential equations. J. Math. Anal. Appl. 265(2), 229–248 (2002).
Caputo, M. & Fabrizzio, M. A new definition of fractional derivative without singular kernel. Prog. Fract. Differ. Appl. 1(2), 73–85 (2015).
Losada, J. & Nieto, J. Properties of a new fractional derivative without singular kernel. Prog. Fract. Differ. Appl. 1(2), 87–92 (2015).
Alqhtani, M., Sadek, L. & Saad, K. M. The Mittag-Leffler-Caputo-Fabrizio Fractional Derivative and Its Numerical Approach. Symmetry 2025(17), 800. https://doi.org/10.3390/sym17050800 (2025).
Al Fahel, S., Baleanu, D., Al-Mdallal, Q. M. & Saad, K. M. Quadratic and cubic logistic models involving Caputo-Fabrizio operator. Eur. Phys. J.: Spec. Top. 232(14–15), 2351–2355. https://doi.org/10.1140/epjs/s11734-023-00935-0 (2023).
Benzahi, A. et al. Caputo-Fabrizio type fractional differential equations with non-instantaneous impulses: Existence and stability results. Alex. Eng. J. 87, 186–200. https://doi.org/10.1016/j.aej.2023.12.036 (2024).
Atangana, A. & Baleanu, D. New fractional derivatives with nonlocal and non-singular kernel: theory and application to heat transfer model. Therm. Sci. 20(2), 763–769 (2016).
Almeida, R. A Caputo fractional derivative of a function with respect to another function. Commun. Nonlinear Sci. Numer. Simul. 44, 460–481 (2017).
Al-Refai, M. & Jarrah, A. M. Fundamental results on weighted Caputo-Fabrizio fractional derivative. Chaos Solitons Fractals. 126, 7–11 (2019).
Jarad, F., Abdeljawad, T. & Shah, K. On the weighted fractional operators of a function with respect to another function. Fractals. 28(8), 2040011 (2020).
Benia, K., Souid, M. S., Jarad, F., Alqudah, M. A. & Abdeljawad, T. Boundary value problem of weighted fractional derivative of a function with a respect to another function of variable order. J Inequal. Appl. 2023(1), 127. https://doi.org/10.1186/s13660-023-03042-9 (2023).
Abdo, M. S., Abdeljawad, T., Ali, S. M., Shah, K. & Jarad, F. Existence of positive solutions for weighted fractional order differential equations. Chaos Solitons Fractals. 141, 110341. https://doi.org/10.1016/j.chaos.2020.110341 (2020).
Hattaf, K. A new generalized definition of fractional derivative with non-singular kernel. Computation. 8(2), 49 (2020).
Alsheekhhussain, Z., Ibrahim, A. G., Al-Sawalha, M. M. & Jawarneh, Y. The Existence of Solutions for w-Weighted \(\psi\)-Hilfer Fractional Differential Inclusions of Order \(\mu \in (1, 2)\) with Non-Instantaneous Impulses in Banach Spaces. Fractal Fract. 8(3), 144. https://doi.org/10.3390/fractalfract8030144 (2024).
Gul, R., Sarwar, M., Shah, K., Abdeljawad, T. & Jarad, F. Qualitative Analysis of Implicit Dirichlet Boundary Value Problem for Caputo-Fabrizio Fractional Differential Equations. J. Funct. Spaces 2020(1), 4714032 (2020).
Nchama, G. A. M., Alfonso, L. D. L., Mecías, A. L. & Ricard, M. R. Properties of the Caputo-Fabrizio Fractional Derivative. Applied Mathematics Information Sciences. 14(5), 761–769. https://doi.org/10.18576/amis/140503 (2020).
Shah, K. & Gul, R. Study of fractional integro-differential equations under Caputo-Fabrizio derivative. Math. Meth. Appl. Sci. 45(13), 7940–7953 (2022).
Wu, X., Chen, F. & Deng, S. Hyers-Ulam stability and existence of solutions for weighted Caputo-Fabrizio fractional differential equations. Chaos Solitons Fractals X. 5, 100040 (2020).
Maazouz, K. & Rodríguez-López, R. Differential equations of arbitrary order under Caputo-Fabrizio derivative: Some existence results and study of stability. Math. Biosci. Eng. 19, 6234–6251 (2022).
Liu, K., Fečkan, M., O’Regan, D. & Wang, J. Hyers-Ulam stability and existence of solutions for differential equations with Caputo-Fabrizio fractional derivative. Mathematics. 7(4), 333 (2019).
Redhwan, S. S. et al. Piecewise implicit coupled system under ABC fractional differential equations with variable order. AIMS Math 9, 15303–15324 (2024).
Thabet, S. T., Vivas-Cortez, M. & Kedim, I. Analytical study of ABC-fractional pantograph implicit differential equation with respect to another function. AIMS Math 8(10), 23635–23654 (2023).
Thabet, S. T., Kedim, I. & Abdeljawad, T. Exploring the solutions of Hilfer delayed Duffing problem on the positive real line. Bound Value Probl. 2024, 95. https://doi.org/10.1186/s13661-024-01903-w (2024).
Benchohra, M., Hamani, S. & Ntouyas, S. K. Boundary value problems for differential equations with fractional order. Surv. Math. Appl. 3, 1–12 (2008).
Abdo, M. S., Ibrahim, A. G. & Panchal, S. K. Nonlinear implicit fractional differential equation involving \(\psi\)-Caputo fractional derivative. Proc. Jangjeon Math. Soc. 22(3), 387–400 (2019).
Abdo, M. S., Shammakh, W. & Alzumi, H. Z. New Existence and Stability Results for\(\psi\)-Caputo- Fabrizio Fractional Nonlocal Implicit Problems. J. Math. 2023, 6123608. https://doi.org/10.1155/2023/6123608 (2023).
Hethcote, H. W. The mathematics of infectious diseases. SIAM review. 42(4), 599–653 (2000).
Bettayeb, M. & Djennoune, S. New results on the controllability and observability of fractional dynamical systems. J. Vib. Control 14(9–10), 1531–1541 (2008).
Wei, J. The controllability of fractional control systems with control delay. Comput. Math. Appl. 64(10), 3153–3159 (2012).
Zhang, H., Cao, J. & Jiang, W. Controllability criteria for linear fractional differential systems with state delay and impulses. J. Appl. Math. 2013(1), 146010 (2013).
Nawaz, M., Wei, J. & Jiale, S. The controllability of fractional differential system with state and control delay. Adv. Differ. Equ. 2020, 30. https://doi.org/10.1186/s13662-019-2479-4 (2020).
Rus, I. A. Ulam stabilities of ordinary differential equations in a Banach space. Carpathian J. Math. 26, 103–107 (2010).
Naveen, S. & Parthiban, V. Application of Newton’s polynomial interpolation scheme for variable order fractional derivative with power-law kernel. Sci. Rep. 14(1), 16090 (2024).
Thabet, S., Abdeljawad, T., Kedim, I. & Ayari, M. I. A new weighted fractional operator with respect to another function via a new modified generalized Mittag-Leffler law. Bound Value. Probl. 2023, 100. https://doi.org/10.1186/s13661-023-01790-7 (2023).
Thabet, S. T., Kedim, I., Abdalla, B. & Abdeljawad, T. The q-analogues of nonsingular fractional operators with Mittag-Leffler and exponential kernels. Fractals 32(07n08), 2440044 (2024).
Acknowledgements
The research team thanks the Deanship of Graduate Studies and Scientific Research at Najran University for supporting the research project through the Nama’a program, with the project code (NU/GP/SERC/13/77-2).
Funding
This research was funded by the Deanship of Scientific Research at Najran University under grant number (NU/GP/SERC/13/77-2).
Author information
Authors and Affiliations
Contributions
K.S. Saad: Supervision, Writing-review editing, and Data curation; M.S. Abdo: Writing-original draft, Methodology, Formal analysis, Writing-review editing, Software, and Investigation; W.M. Hamanah: Supervision, Writing-review editing, and Investigation. All authors have read and agreed to the published version of the manuscript.
Corresponding author
Ethics declarations
Competing interests
The authors declare no competing interests.
Additional information
Publisher’s note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution-NonCommercial-NoDerivatives 4.0 International License, which permits any non-commercial use, sharing, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if you modified the licensed material. You do not have permission under this licence to share adapted material derived from this article or parts of it. The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by-nc-nd/4.0/.
About this article

Cite this article
Saad, K.M., Abdo, M.S. & Hamanah, W.M. Existence and controllability analysis of multi-term fractional coupled systems with generalized \([\psi ,w]\)-Caputo-Fabrizio operators. Sci Rep 15, 34434 (2025). https://doi.org/10.1038/s41598-025-17523-y
Received:
Accepted:
Published:
Version of record:
DOI: https://doi.org/10.1038/s41598-025-17523-y
