
Abstract
The Zakharov–Kuznetsov–Benjamin–Bona–Mahony equation (ZKBBME) is a crucial mathematical model used in fractional quantum mechanics, optical fiber signal processing, ion-acoustic waves in plasma, water waves driven by gravity, turbulent flow, fluid flow waves, and for describing many other real-world phenomena. This article employs the modified exp-function method and exp\((-\Phi (\psi ))\)-expansion method, along with a truncated M-fractional wave transformation, to investigate new rational, trigonometric, hyperbolic, and exponential function solutions. Assigning specific parameter values generates diverse wave shapes most significantly, a new combined wave type called the compacton-kink and a class of peakon waves, which has not yet been documented in previous research of this model. 2-dimensional, 3-dimensional, contour, density, and polar plots illustrate the physical properties of soliton solutions, demonstrating the method’s suitability for analyzing a range of nonlinear fractional models with truncated M-fractional derivative (TMFD). Furthermore, utilizing the Galilean transformation to transform the equation into a planar dynamical system, bifurcation theory is applied to investigate its bifurcation and equilibrium points. The findings show that the TMFD framework captures intricate nonlinear wave dynamics and considerably enriches the ZKBBME solution space. These results advance our knowledge of wave structures in engineering and applied physics models controlled by fractional-order nonlinear partial differential equations (FNLPDEs).
Similar content being viewed by others


Introduction
In recent decades, nonlinear models have garnered significant research interest due to their widespread presence in applied mathematics, chemistry, mathematical physics, and material science. Understanding nonlinear partial differential equations (NLPDEs) and their fractional counterparts is crucial for gaining insights into nonlinear phenomena. NLPDEs can elucidate complex processes and reveal realities beyond the scope of ordinary differential equations and conventional methods1,2,3. The study of NLPDEs has grown considerably recently, with an emphasis on fractional calculus and analytical methods to investigate intricate wave patterns. For instance, the study in4 used the complete discrimination system method for polynomials to characterize the soliton solutions of the double-chain DNA system, the work in5 used the planar dynamics system approach in order to examine the chaotic behavior and traveling wave solution of the fractional stochastic Zakharov system, and Bilal et al. discovered new travelling wave solutions for a nonlinear diffusion-reaction equation with the modified extended direct algebraic method6. The use of fractional derivatives to improve the modeling accuracy of physical systems has gained attention in addition to solution approaches. Fractional-order operators, in contrast to conventional derivatives, take into account memory and nonlocal effects, which are essential for explaining real-world occurrences like wave propagation in complex media, anomalous diffusion, and viscoelasticity. For example, the work in7 shows how fractional derivatives provide nonlinear field theories richer dynamics, the study8 investigates how incorporating fractional-order derivatives into the extended Kairat-II equation enhances the understanding of optical wave propagation, and the work of9 explores the role of fractional derivatives in modeling the doubly dispersive nonlinear wave system, demonstrating their impact on the stability and phase dynamics of solitonic structures through bifurcation and phase portrait analysis. The work of10 reveals that fractional calculus improves the modeling of energy transfer and wave control in advanced photonic devices and investigates how they might be used to simulate realistic solitary wave profiles. These works demonstrate how fractional calculus can significantly enhance the analytical tractability, flexibility, and realism of NLPDE models.
The classical derivative, based on integer-order calculus, describes a function’s instantaneous rate of change locally, assuming smoothness. While effective for many systems, classical calculus approaches often fall short when modeling complex, real-world processes with memory, hereditary properties, or non-local interactions. Fractional calculus (FC) addresses these limitations by extending derivatives to non-integer orders. A fractional derivative captures both the local rate of change and the historical behavior of a function, making it suitable for analyzing systems with memory and long-range dependence, as found in viscoelasticity, anomalous diffusion, bioengineering, and complex dynamic systems. The pursuit of a generalized fractional derivative definition has yielded several formulations, including the Riemann–Liouville, Caputo, Grunwald–Letnikov, conformable, beta, and truncated M-fractional derivatives. Among the newer formulations of fractional derivatives designed to handle singular kernels, nonlinearities, or convergence issues, the TMFD has emerged as a promising operator. The TMFD, a recent refinement, uses a Mittag-Leffler-type kernel and truncation parameter to control memory length. FC utility in modeling nonlinear phenomena in fields like fluid mechanics, chemistry, and biology has attracted significant research interest from mathematicians and medical professionals for the past two centuries11,12,13,14,15. Fractional-order nonlinear partial differential equations (FNLPDEs) generalize conventional integer-order PDEs, providing a more nuanced representation of dynamical systems. The application of fractional differentiation to nonlinear models represents a significant advancement in various research fields.
Solitons are stable, self-confined waves that maintain their shape and speed while propagating through a medium, resisting dispersion. Russell first observed this phenomenon, which he called the ”wave of translation,” in 1834, and it was later termed a solitary wave16. Boussinesq and Rayleigh were among the first to theoretically study solitary waves, and their study has since become a prominent field. Solitons arise from a balance between nonlinearity (which steepens the wave) and dispersion (which spreads the wave). Research has highlighted their diverse properties and utility across scientific and technological domains17,18. They are prevalent in diverse fields, including high-speed telecommunications, ultrafast photonics, elementary particle physics, plasma physics and condensed matter, cosmology, rogue oceanic waves, and Bose-Einstein condensates. Consequently, mathematicians now employ advanced numerical and analytical techniques to determine soliton solutions for FNLPDEs, leading to increased scholarly attention on solitary wave theory facilitated by symbolic computation. For example, Hirota bilinear19, extended direct algebraic20, improved modified extended tanh-function21, \(\frac{G^,}{G^2}\)-expansion22, Jacobi elliptic function23, generalized Khater24, new Kudrashov25, tanh-coth26, modified simple equation27, improved F-expansion28, enhanced algebraic method29, and many more30,31.
Two effective analytical techniques for determining precise solutions to NLPDEs, which are commonly encountered in fluid dynamics, mathematical physics, and nonlinear wave theory, are the modified exp-function method32 and the exp\((-\Phi (\xi ))\)-expansion method33. I used both in my research because of their complementary abilities to solve FNLPDEs. These techniques are especially helpful for determining periodic structures, solitons, and traveling wave solutions–all of which describe a variety of physical phenomena that occur in the real world. More flexibility and generality are provided by the modified exp-function approach compared to the original exp-function method, which builds solutions by expressing the dependent variable as a rational function of exponential terms. Because of its algebraic simplicity and versatility in handling different kinds of nonlinearities, the modified exp-function approach was selected. In the meantime, the exp\((-\Phi (\xi ))\)-expansion method was used because it can capture more generalized solution forms, particularly when the tanh or \((G'/G)\)-methods are not sufficient. With the use of the auxiliary function \((\Phi (\xi ))\), this approach offers more flexibility, enabling a larger class of solutions designed for complicated systems. The primary benefits of both approaches are their flexibility, computing efficiency, and capacity to generalize or recover other established methods. Because of these characteristics, they are useful resources for researchers looking for closed-form solutions to FNLPDEs in situations where conventional techniques might not be sufficient.
The formulation of the ZKBBME with the TMFD is still mainly undetermined, despite the fact that it has been studied in classical and certain fractional settings. A more realistic representation of memory and hereditary characteristics present in different physical systems is provided by this generalized operator. Analytical studies of the ZKBBM equation with TMFD are rare, despite the growing use of fractional calculus in modeling wave propagation and nonlinear dynamics. More importantly, this fractional model has not yet been thoroughly examined using bifurcation analysis, a potent technique for identifying shifts in the qualitative behavior of nonlinear systems. Without considering the evolution of the system’s phase portraits and traveling wave structures during parameter variation, the majority of previous efforts have concentrated on achieving accurate solutions. This highlights a glaring research need to comprehend the branching behavior and qualitative dynamics of solutions in this wide mathematical context.
This study is motivated by the increasing need to analyze FNLPDEs, particularly those that use the TMFD, which offers a useful mathematical framework for capturing memory effects and nonlocal dynamics seen in real-world systems like nonlinear dispersive flows, shallow water waves, and plasma oscillations. Such intricacies are frequently beyond the scope of classical models, especially where parameter sensitivity is crucial. The main driving force behind this work is the use of powerful mathematical tools, such as the exp\((-\Phi (\xi ))\)-expansion method and the modified exponential function method, to extract rich wave structures and unique solution patterns. Additionally, the study can investigate how minor changes in the governing parameters result in qualitative changes in the behavior of the solution owing to the inclusion of bifurcation analysis.
The truncated M-fractional (1+1) dimensional Zakharov–Kuznetsov–Benjamin–Bona–Mahony equation is expressed as:
Here, b and c are parameters. The operator \(_\psi \mathcal {D}_{M}^{\nu , \beta }\) acting on \(v(x, t)\) is known as TMFD. The term \(_\psi \mathcal {D}_{M,t}^{\nu , \beta }v\) accounts for temporal memory effects, crucial in viscoelastic media, electro-rheological fluids, and non-Markovian processes. The term \(_\psi \mathcal {D}_{M,x}^{\nu , \beta }v\) describes nonlocal spatial behavior, common in anomalous transport, fractured porous media, and Levy flight dynamics. The nonlinear advection term \(- 2b\,v _\psi \mathcal {D}_{M,x}^{\nu , \beta }v\) models wave self-interaction, characteristic of nonlinear shallow water wave equations or internal ocean waves, leading to wave steepening and shock/soliton formation. The dispersive term \(-c\, _\psi \mathcal {D}_{M,xxt}^{3\nu , \beta }v\), a high-order mixed space-time derivative, represents wave spreading, especially prominent in nonhomogeneous or viscoelastic materials with significant temporal and spatial memory.
The ZKBBME, derived from the Benjamin-Bona-Mahony (BBM) and Zakharov-Kuznetsov (ZK) equations, models the unidirectional propagation of long water waves with small amplitude and large wavelength in nonlinear dispersive systems. ZKBBME finds broad application in plasma physics, fluid mechanics, solid-state physics, capillary-gravity waves, and chemical physics. Consequently, the equation was solved using various methods, including the new \(\frac{G^,}{G}\)-expansion34, Exp-function35, improved generalized tanh-coth36, differential transform37, generalized algebraic38, modified sub-equation39, exp\((-\Phi (\xi ))\)-expansion40, generalized rational exponential function41, improved Bernoulli sub-equation function42, first integral43, generalized \(\frac{G^,}{G}\)-expansion43, modified Khater44, (\(1/G,\frac{G^,}{G}\))-expansion45, auxiliary equation46, extended simplest equation method47, and many more. This article uses the modified exp-function method and the exp\((-\Phi (\psi ))\)-expansion method to find realistic, general, and useful soliton solutions for the ZKBBME with TMFD. These methods effectively provide closed-form soliton solutions to FNLPDEs. This study aims to obtain typical and general stable broad-ranging optical soliton solutions to ZKBBME using new analytical methods.
In contrast to previous fractional derivatives, the recently researched TMFD in fractional derivative studies was employed for obtaining new soliton solutions. To the best of our knowledge, the aforementioned methods have not been used to explore the ZKBBME in the sense of the TMFD. We therefore stress that these are new findings. The primary objective is to achieve a comprehensive understanding of the equation’s physical implications. Through this endeavor, the study aims to advance the field of nonlinear dynamics and provide illuminating insights into the behavior exhibited by analogous equations.
This article is structured as follows: Sect. 2 introduces the TMFD, its definition, and its properties. Section 3 outlines the modified exponential function and exp\((-\Phi (\psi ))\)-expansion techniques, which are then used in 4 to derive exact solutions for the truncated M-fractional ZKBBME. Section 5 analyzes the bifurcation analysis of the model. Section 6 describes and graphically illustrates the results, and Sect. 8 concludes the study.
The truncated M-fractional derivative
Sousa and de Oliveira introduced the TMFD, a novel variation of the M-fractional derivative, offering increased flexibility by overcoming the limitations of traditional derivatives. Unlike the classical derivative, which only considers the present state and ignores the past, the TMFD includes a finite “memory” through a bounded Mittag–Leffler kernel. This means it can account for how a system’s history influences its current behavior, giving results that are closer to real-world conditions and more stable in calculations. For example, when modeling wave movement in viscoelastic materials, the TMFD can capture the fading memory effect where past stretching or compression affects the current wave speed and energy loss something a classical derivative cannot do. This feature is especially valuable for fractional equations that describe systems with both local and long-range effects, such as the dynamics of optical solitons in nonlinear media. We use the TMFD because it keeps the strengths of classical calculus while adding a flexible, bounded memory effect. This makes our model both easier to handle mathematically and more accurate in representing real physical processes, allowing us to describe complex nonlinear evolution equations with stability and physical significance. A new modeling technique that connects theoretical frameworks with the intricate dynamics of real-world, nonlinear dispersive systems is provided by incorporating the TMFD into the ZKBBME.
This section defines key terms and explores properties of the TMFD.
Definition: The TMFD of order \(\nu\) for a function f is defined as48:
The truncated Mittag-Leffler of one parameter, is represented here as for \(t>0, \text {and}~E_{\beta }\nu \in (0, 1),\beta >0\) is a
If \(c>0\), \(\lim _{t \rightarrow 0^+}(_i\mathcal {D}_{N}^{\nu , \beta }f(t))\) and f is \(\nu\)-differentiable in some open interval (0,c). Then we get
Property 1.1. f is continuous at \(t_0\), if \(f: (0, \infty )\rightarrow \mathbb {R}\) is \(\nu\)-differentiable for \(t_0>0\), with \(\nu \in (0, 1], \beta >0\)48.
Property 1.2. Let \(0 <\nu \le 1, \beta > 0, a, b \in \mathbb {R}, f, g, \nu -\)differentiable, at a point \(t>0\). Then48
Benefits and Applications:
The TMFD generalizes several well-known fractional derivatives while preserving desirable features such as linearity and the ability to reduce to classical derivatives for specific parameters. Its truncated form limits the infinite memory of standard fractional derivatives, improving computational efficiency while retaining accuracy49. This makes it effective for handling discontinuities, singularities, and real-time dynamic systems where global nonlocality is computationally demanding, and allows smooth transitions between fractional orders for adaptive modeling50. Its practical value is clear in diverse applications. In optical physics, for example, it models soliton propagation in complex Ginzburg–Landau and nonlinear Schrödinger equations under Kerr-law nonlinearity, capturing fading memory effects that classical derivatives cannot51. Similar benefits occur in fluid dynamics and heat transfer52, astrophysical Lane–Emden equations53, and in quantum optics for wave modulation and pulse propagation54. It also aids in control theory, sub-diffusion modeling, biomedical simulations, and signal/image processing. Across these fields, the TMFD yields more accurate and physically meaningful results for systems with memory, which is why it is preferred in this study.
Summary of methods
Assume a general NLFPDE:
where G is a polynomial in v(x, t) and its partial derivatives.
Using fractional wave transformation defined in Eq. (7), we have ODE as follows,
Modified exponential function method
Using the modified exp-function approach, the solutions of Eq. (8) can be stated as46:
where \(A_p\), \((p=0,1,2,...,N)\) and \(B_q\), \((q=0,1,2,...,M)\) are constants to be finded such that \({A_N} \ne 0\), \({B_M} \ne 0\), and \({\phi (\psi )}\) satisfies the ODE as follows:
where \({\eta }, and ~{\delta }\) are constants, then Eq. (10) has following solutions:
Case-1:
If \({\eta }\ne 0\), and \({\delta ^2-4\eta }>0\), then
Case-2:
If \({\eta }\ne 0\), and \({\delta ^2-4\eta }<0\), then
Case-3:
If \({\eta }=0,~{\delta }\ne 0\), and \({\delta ^2-4\eta }>0\), then
Case-4:
If \({\eta }\ne 0,~{\delta }\ne 0\), and \({\delta ^2-4\eta }=0\), then
Case-5:
If \({\eta }=0,~{\delta }=0\), and \({\delta ^2-4\eta }=0\), then
Exp\((-\Phi (\psi ))\)-expansion method
Using the exp\((-\Phi (\psi ))\)-expansion method, the solutions of Eq. (8) can be stated as47:
where \(A_p\), \((p=0,1,2,...,N)\) are constants to be finded. Balancing principle used to find the integer N, \({A_N} \ne 0\) and \({\phi (\eta )}\) satisfies the ODE as follows:
where a, and b are constants, then Eq. (17) has following solutions:
Case-1:
If \({\eta }\ne 0\), and \({\delta ^2-4\eta }>0\), then
Case-2:
If \({\eta }\ne 0\), and \({\delta ^2-4\eta }<0\), then
Case-3:
If \({\eta }=0,~{\delta }\ne 0\), and \({\delta ^2-4\eta }>0\), then
Case-4:
If \({\eta }\ne 0,~{\delta }\ne 0\), and \({\delta ^2-4\eta }=0\), then
Case-5:
If \({\eta }=0,~{\delta }=0\), and \({\delta ^2-4\eta }=0\), then
Then equation (16) and (17) are substituted in (8). All terms of the same power exp\((-\Phi (\psi ))\) are gathered and set to zero, resulting in a system of algebraic equations that may be solved using Mathematica to determine the values of \(a_p\).
Solutions for the truncated M-fractional (1+1) dimensional Zakharov– Kuznetsov–Benjamin–Bona–Mahony equation
The new soliton solutions are established in this part by applying the suggested techniques to Eq. (1). By applying the traveling wave transformation defined in Eq. (7). The NLODE obtained as:
Integrating Eq. (23), we obtain.
Application on modified exponential function method
This part uses the well-known modified exponential function technique that has been documented in the literature and employ the balance principle between terms \(V^{2}\) and \(V''\) from Eq. (24).
hence, solution of Eq. (24) is as follows:
where \(A_0, A_1, A_2, A_3, B_0\), and \(B_1\) are unknown parameters to be identified later. Now, subtituting Eq. (10) and Eq. (26) into Eq. (24), while setting each power of exp\((\Phi (\eta ))\) equal zero.
where
\(C_{-4}=6 a A_3 B_1^2 c \eta ^2+12 a A_3 B_1^2 c \eta +6 a A_3 B_1^2 c+A_3^2 (-b) B_1\),
\(C_{{ - 3}} = 10aA_{3} B_{1}^{2} c\delta \eta + 10aA_{3} B_{1}^{2} c\delta + 2aA_{2} B_{1}^{2} c\eta ^{2} + 16aA_{3} B_{0} B_{1} c\eta ^{2}\)\(+ 4aA_{2} B_{1}^{2} c\eta + 32aA_{3} B_{0} B_{1} c\eta + 2aA_{2} B_{1}^{2} c + 16aA_{3} B_{0} B_{1} c - A_{3}^{2} bB_{0} - 2A_{2} A_{3} bB_{1}\),
\(C_{{ - 2}} = 4aA_{3} B_{1}^{2} c\delta ^{2} + 3aA_{2} B_{1}^{2} c\delta \eta + 27aA_{3} B_{0} B_{1} c\delta \eta + 3aA_{2} B_{1}^{2} c\delta\)\(+ 27aA_{3} B_{0} B_{1} c\delta + 12aA_{3} B_{0}^{2} c\eta ^{2} + 6aA_{2} B_{0} B_{1} c\eta ^{2}\)\(+ 24aA_{3} B_{0}^{2} c\eta + 12aA_{2} B_{0} B_{1} c\eta + 12aA_{3} B_{0}^{2} c + 6aA_{2} B_{0} B_{1} c\)\(- aA_{3} B_{1}^{2} - 2A_{2} A_{3} bB_{0} - A_{2}^{2} bB_{1} - 2A_{1} A_{3} bB_{1} + A_{3} B_{1}^{2}\)
\(C_{{ - 1}} = aA_{2} B_{1}^{2} c\delta ^{2} + 11aA_{3} B_{0} B_{1} c\delta ^{2} + 21aA_{3} B_{0}^{2} c\delta \eta + 9aA_{2} B_{0} B_{1} c\delta \eta + 21aA_{3} B_{0}^{2} c\delta\)\(\quad + 9aA_{2} B_{0} B_{1} c\delta + 6aA_{2} B_{0}^{2} c\eta ^{2} + 12aA_{2} B_{0}^{2} c\eta + 6aA_{2} B_{0}^{2} c - aA_{2} B_{1}^{2} - 2aA_{3} B_{0} B_{1} - A_{2}^{2} bB_{0}\)\(- 2A_{1} A_{3} bB_{0} - 2A_{1} A_{2} bB_{1} - 2A_{0} A_{3} bB_{1} + A_{2} B_{1}^{2} + 2A_{3} B_{0} B_{1}\),
\(C_{0} = 9aA_{3} B_{0}^{2} c\delta ^{2} + 3aA_{2} B_{0} B_{1} c\delta ^{2} + 10aA_{2} B_{0}^{2} c\delta \eta + aA_{0} B_{1}^{2} c\delta \eta - aA_{1} B_{0} B_{1} c\delta \eta\)\(+ 10aA_{2} B_{0}^{2} c\delta + aA_{0} B_{1}^{2} c\delta - aA_{1} B_{0} B_{1} c\delta + 2aA_{1} B_{0}^{2} c\eta ^{2} - 2aA_{0} B_{0} B_{1} c\eta ^{2} + 4aA_{1} B_{0}^{2} c\eta\)\(- 4aA_{0} B_{0} B_{1} c\eta + 2aA_{1} B_{0}^{2} c - 2aA_{0} B_{0} B_{1} c - aA_{3} B_{0}^{2} - aA_{1} B_{1}^{2} - 2aA_{2} B_{0} B_{1} - 2A_{1} A_{2} bB_{0} {\kern 1pt}\)\(- 2A_{0} A_{3} bB_{0} - A_{1}^{2} bB_{1} - 2A_{0} A_{2} bB_{1} + A_{3} B_{0}^{2} + A_{1} B_{1}^{2} + 2A_{2} B_{0} B_{1}\),
\(C_{1} = 4aA_{2} B_{0}^{2} c\delta ^{2} + aA_{0} B_{1}^{2} c\delta ^{2} - aA_{1} B_{0} B_{1} c\delta ^{2} + 3aA_{1} B_{0}^{2} c\delta \eta - 3aA_{0} B_{0} B_{1} c\delta \eta\)\(+ 3aA_{1} B_{0}^{2} c\delta - 3aA_{0} B_{0} B_{1} c\delta - aA_{2} B_{0}^{2} - aA_{0} B_{1}^{2} - 2aA_{1} B_{0} B_{1}\)\(- A_{1}^{2} bB_{0} - 2A_{0} A_{2} bB_{0} - 2A_{0} A_{1} bB_{1} + A_{2} B_{0}^{2} + A_{0} B_{1}^{2} + 2A_{1} B_{0} B_{1}\),
\(C_2=a A_1 B_0^2 c \delta ^2-a A_0 B_0 B_1 c \delta ^2-a A_1 B_0^2-2 a A_0 B_0 B_1-2 A_0 A_1 b B_0-A_0^2 b B_1+A_1 B_0^2+2 A_0 B_0 B_1\),
\(C_3=-a A_0 B_0^2+A_0^2 (-b) B_0+A_0 B_0^2\).
Next, solve the system of equations.
Set-1:
Using Eq. (29) in Eq. (26) and Eqs. (11) – (15) of cases to attain the solutions.
Case-1:
Case-2:
Case-3:
Case-4:
Case-5:
Set-2:
Case-1:
Case-2:
Case-3:
Case-4:
Case-5:
Application on exp\((-\Phi (\psi ))\)-expansion method
This part uses the well-known exp\((-\Phi (\psi ))\)-expansion technique that has been documented in the literature and employ the balance principle between terms \(G^{2}\) and \(G''\) from Eq. (24).
hence, solution of Eq. (24) is as follws:
where \(A_0, A_1,\) and \(A_2\) are unknown parameters to be identified later. Now, subtituting Eq. (17) and Eq. (42) into Eq. (24), while setting all powers of exp\((-\Phi (\psi ))\) to zero.
where
\(D_{-4}=6 a A_2 c-A_2^2 b\),
\(D_{-3}=10 a A_2 c \delta +2 a A_1 c-2 A_2 A_1 b\),
\(D_{-2}=4 a A_2 c \delta ^2+3 a A_1 c \delta +8 a A_2 c \eta -a A_2-A_1^2 b-2 A_0 A_2 b+A_2\),
\(D_{-1}=a A_1 c \delta ^2+6 a A_2 c \delta \eta +2 a A_1 c \eta -a A_1-2 A_0 A_1 b+A_1\),
\(D_0=a A_1 c \delta \eta +2 a A_2 c \eta ^2-a A_0-A_0^2 b+A_0\),
Next, determine the solution sets for the aforementioned system of equations.
Set-1:
Using Eq. (45) in Eq. (42) and Eqs. (18) – (22) of cases to attain solutions.
Case-1:
Case-2:
Case-3:
Case-4:
Case-5:
Set-2:
Case-1:
Case-2:
Case-3:
Case-4:
Case-5:
Graphical description

The physical configurations of different surfaces described by Eq. 30 are investigated by adjusting arbitrary parameters such as \(a=0.2,b=1,c=1.2,B_1=0.5,A_3=1.6,\beta =0.9,\nu =0.7,H=1.6\).
This figure represents a nonlinear traveling wave with localized features that is controlled by a complex interaction of physical parameters. It solution serves as an example of how complex behaviors such as dispersive shocks, self-stabilizing pulses, or sharp wavefronts in physical systems can be described by accurate solutions in nonlinear dynamics.

The physical configurations of different surfaces described by Eq. 31 are investigated by adjusting arbitrary parameters such as \(a=1.4,b=1.3,c=1.6,B_1=0.7,A_3=0.4,\beta =0.7,\nu =0.9,H=1.2\).
Graphs of \(v_{2}\)(x, t) describes a moving wave that may be solitary. It is significant in models where nonlinear resonance, memory effects, and energy concentration are crucial because its evolution represents intricate physical phenomena like resonance-induced instabilities, nonlinear bursts, or localized oscillatory energy transport.

The physical configurations of different surfaces described by Eq. 32 are investigated by adjusting arbitrary parameters such as \(a=0.9,b=0.5,c=1,B_1=0.8,A_3=0.2,\beta =0.6,\nu =0.6,H=0.2\).
Physically, this might be regarded as nonlinear gain in optical media (such as lasers), energy pumping, or autocatalytic chemical reaction. Steep gradients in the solution and a sharp rise in amplitude close to the wavefront are signs of steepening phenomena, which are common in nonlinear fluid dynamics and behave like shocks. These are instances, like hydraulic jumps or electrostatic shocks in dusty plasmas, where waves not only move but also become sharper over time, possibly creating kinks or discontinuities.

The physical configurations of different surfaces described by Eq. 33 are investigated by adjusting arbitrary parameters such as \(a=0.3,b=0.8,c=1.7,B_1=1.5,B_0=0.7,A_3=1.3,\beta =1.8,\nu =0.5,H=0.8\).
Physically \(v_{4}(x,t)\) could stand for: an energy pulse in a nonlinear dispersive medium that is localized, a chemical or biological system’s reaction front, where nonlinear source terms determine the signal’s concentration and speed, and a singularity-forming system that may describe precursors to shocks or blow-up events in non-conservative fields, depending on parameter ranges.

The physical configurations of different surfaces described by Eq. 36 are investigated by adjusting arbitrary parameters such as \(a=1.6,b=1.4,\eta =1.7,\delta =0.8,\nu =0.4,\beta =0.7,H=1.2\).
These patterns appear in media where wave energy tends to accumulate on a periodic basis, resulting in single crests, or cusps. This is particularly important in reaction-diffusion systems or nonlinear dispersive mediums where wave propagation is irregular and pulsing or bursting.

The physical configurations of different surfaces described by Eq. 37 are investigated by adjusting arbitrary parameters such as \(a=2.1,b=0.5,\eta =1.1,\delta =2.6,\nu =0.6,\beta =1.2,H=1.7\).
This profile characterizes non-oscillatory, nonlinear traveling waves common in phase transitions or interface dynamics. In this fractional context, the antikink behavior suggests a dissipative front or retreating boundary layer, modeling phase demarcation in ferromagnets, dislocation movement in crystals, or retreating population waves in ecology.

The physical configurations of different surfaces described by Eq. 38 are investigated by adjusting arbitrary parameters such as \(a=0.8,b=0.4,\eta =1.6,\delta =0.2,\nu =0.2,\beta =1.9,H=1.5\).
The peaked pulse \(v_{8}\) is used to simulate localized events like energy bursts in fractional media, mechanical impact waves, and biological nerve signals. The fundamental dynamics of real-world systems with memory, dissipation, and localization are captured by its combination of nonlinearity, abrupt peaks, and fractional time-space behavior.

The physical configurations of different surfaces described by Eq. 46 are investigated by adjusting arbitrary parameters such as \(A_1=1,a=1.5,c=1.3,\delta =0.6,\beta =0.9,H=0.5,\nu =0.2\).
A non-smooth traveling wave with an abrupt transition zone is indicated by the cusp shape in the graph of v11(x,t), which physically models systems where a sudden shift in wave attributes (such as velocity, amplitude, or phase) happens. Dispersive shocks, phase boundaries, localized strain zones, and nonlinear interfaces in complex media are a few examples of situations where this is pertinent.

The physical configurations of different surfaces described by Eq. 47 are investigated by adjusting arbitrary parameters such as \(A_1=2.4,a=2,c=2.6,\delta =2,\beta =2.8,H=0.4,\nu =0.7\).
Wave described by the solution v12(x,t) may exhibit singularities or abrupt oscillations. It represents a physical system that is susceptible to periodic energy concentration, resonance amplification, or instability. Such wave behavior is seen in voltage spikes that electric transmission lines, fronts of acoustic shocks under specific boundary pushing, and instabilities of plasma sheaths.

The physical configurations of different surfaces described by Eq. 48 are investigated by adjusting arbitrary parameters such as \(A_1=2.3,a=1.2,c=0.8,\delta =0.7,\beta =1.3,H=0.4,\nu =0.5\).
The wave rapidly decreases from a high value to a lower asymptotic state. In systems with fractional evolution, damping, or non-instantaneous reactions, this is a nonlinear dissipative front that could be a collapse wave, repolarization spike, or abrupt unidirectional transition. It simulates systems in which energy is not conserved and wave amplitude rapidly fades due to damping or dissipation, which is common in fractional-order, memory-rich, or lossy media.

The physical configurations of different surfaces described by Eq. 49 are investigated by adjusting arbitrary parameters such as \(A_1=0.8,a=1.2,c=0.3,\delta =0.2,\beta =1.2,H=0.4,\nu =0.6\).
It depicts a localized structure that decays algebraically as opposed to exponentially as it moves through a nonlinear, weakly dispersive, or memory-rich medium. In physics and biological systems, this type of wave is typical of fractional solitons, long-range transport phenomena, or non-diffusive energy localization.

The physical configurations of different surfaces described by Eq. 52 are investigated by adjusting arbitrary parameters such as \(a=1.4,b=1.1,c=2.8,\delta =2.3,\beta =1.3,H=0.6,\nu =0.3\).
In nonlinear, memory-rich media like shallow fluids, viscoelastic chains, or geophysical flows, it symbolizes a non-smooth moving wave. This approach is perfect for modeling concentrated momentum transport, wave-breaking precursors, or dispersive shocks when energy localizes sharply at a single place because of the abrupt peak, which results from the nonlinear structure of nested tanh terms and rational expressions.

The physical configurations of different surfaces described by Eq. 53 are investigated by adjusting arbitrary parameters such as \(b=2.2,a=0.2,c=1.4,\delta =1.7,\beta =0.4,H=0.9,\nu =0.5\).
A compacton–kink hybrid wave is described by the solution \(v_{17}\), which physically simulates energy packets or phase fronts in memory-containing and structurally transitioning systems, such as interface fronts in phase-change materials, strain waves in granular chains, abrupt magnetization changes in ferromagnetic domain walls, nerve impulses in biological tissues, and light pulses in nonlinear optical fibers.

The physical configurations of different surfaces described by Eq. 54 are investigated by adjusting arbitrary parameters such as \(b=0.8,a=1.2,c=2,\delta =0.3,\beta =1.2,H=0.5,\nu =0.4\).
A smooth, asymmetric localized wave propagating in a nonlinear fractional medium is described by the wave solution \(v_{18}\). It simulates physical phenomena in which directional skewness or asymmetric dispersion is introduced by nonlinear effects and energy or information propagates with memory. This comprises biological signals, dissipative photonic pulses, and reaction-diffusion fronts, which mimic non-equilibrium dynamics in real-world media by rising rapidly and then gradually declining.

The physical configurations of different surfaces described by Eq. 55 are investigated by adjusting arbitrary parameters such as \(b=2.2,a=2.2,c=0.8,\delta =0.3,\beta =1.7,H=0.2,\nu =0.1\).
The solution \(v_{19}\) depicts a strongly peaked, non-oscillatory isolated wave moving through a fractional-order nonlinear medium. With long-range memory effects and no trailing oscillations, it captures physical scenarios in which information, stress, or energy travels in a focused pulse. Heat spikes in thermal memory medium, strain waves in viscoelastic materials, pressure pulses in porous rock, and signal propagation in biological or artificial nonlinear systems are examples of real-world analogs.

The physical configurations of different surfaces described by Eq. 56 are investigated by adjusting arbitrary parameters such as \(b=0.5,a=0.2,c=0.3,\delta =0.9,\beta =0.5,H=0.4,\nu =0.1\).
A sharp, isolated, non-oscillatory trough, or antipeakon, traveling through a fractional-order nonlinear medium is described by the wave solution \(v_{20}\). It creates a sharp drop in wave amplitude, which is indicative of a negative energy structure or localized shortfall. Memory effects and nonlinear geometric scaling are balanced to produce this behavior. Physically, these structures simulate negative phase fronts, traveling voids, or inhibitory pulses in fluids, optics, magnetism, and neuroscience systems.
Bifurcation analysis
Bifurcation analysis examines how the qualitative behavior of a dynamical system changes as a parameter is varied. It focuses on identifying critical parameter values where the system undergoes sudden shifts in long-term behavior, such as the appearance or disappearance of equilibrium states or periodic orbits. In practice, one tracks how solution branches evolve with parameters using continuation methods. The resulting bifurcation diagrams visually show where and how these transitions occur. This approach offers insight into when and how a system will undergo abrupt qualitative changes, making bifurcation analysis an essential tool for studying nonlinear dynamics. Eq. 24 can be represented as a planar dynamical system using a Galilean transformation, as shown by:
where \(L_1=\frac{b}{ac}\) and \(L_2=\frac{-1+a}{ac}\) To find the equilibrium points of system Eq. 57, we solve \(W = 0\) and \(L_1 V^2(\psi ) + L_2 V(\psi ) = 0.\) two equilibrium points exist:
System Eq. 57 has a Jacobian matrix with a determinant of the form
Therefore, the equilibrium point (V, W) is a center, saddle, or cuspidal point depending on whether J(V, W) is positive, negative, or zero, respectively. Different parameter values can then lead to various outcomes.
Case-i:
When \(L_1 < 0\) and \(L_2 < 0\), Equation(57) yields two equilibrium points: \(N_1 = (0, 0)\), which acts as a center, with nearby trajectories forming closed orbits and exhibiting neutral stability and \(N_2 = (-1, 0)\), which acts as a saddle point, with trajectories drawn toward it in one direction but repelled in another, consistent with the phase behavior illustrated in Fig. 17.
Case-ii:
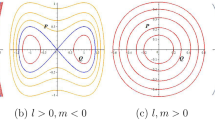
When \(L_1 > 0\) and \(L_2 < 0\), Equation(57) gives two equilibrium points: \(N_1 = (0, 0)\), which serves as a center, with trajectories nearby looping endlessly around it and exhibiting neutral stability and \(N_2 = (1, 0)\), which acts as a saddle point, drawing motion toward it along one direction while pushing it away in another, exactly as shown by the phase portrait in Fig. 18
Case-iii:
When \(L_1 < 0\) and \(L_2 > 0\), Equation(57) has two equilibrium points: \(N_1 = (0, 0)\) and \(N_2 = (1, 0)\). At \(N_1\), the system behaves like a saddle point. Paths near it may approach along one direction but diverge in another,this reflects instability. At \(N_2\), the system acts as a center. Nearby motion loops endlessly around it without moving away, reflecting neutral stability. This matches the phase portrait shown in Fig. 19
Case-iv:
When \(L_1 > 0\) and \(L_2 > 0\), Equation(57) gives two equilibrium points: \(N_1 = (0,0)\) and \(N_2 = (-1,0)\). At \(N_1\), the system acts like a saddle point. Trajectories head toward the point from some directions but are pushed away in others, indicating unstable behavior. At \(N_2\), the system behaves as a center. Nearby paths circle around continuously and remain in place, showing neutral steadiness. These behaviors match the phase portrait in Fig.20.
The Hamiltonian function, denoted \(H(V, W)\), plays the role of an energy-like quantity in planar dynamical systems of the form \(\dot{V} = W\), \(\dot{W} = f(V)\). It satisfies the conditions:
so that trajectories lie on its level sets. Critical points of the system coincide with the stationary points where \(\nabla H = 0\). Whether an equilibrium is a stable center or a saddle depends on the local curvature (Hessian) of \(H\). In bifurcation analysis, the Hamiltonian provides a global, geometric perspective on how orbits and separatrices evolve as parameters vary. It complements local Jacobian stability analysis by illustrating energy contours and revealing transitions such as saddle-node or separatrix bifurcations.

The visual analysis for case-i.

The visual analysis for case-ii.

The visual analysis for case-iii.

The visual analysis for case-iv.
Results and discussion
In contrast to Ilhan et al.55, who used a modified Riemann–Liouville derivative and a modified simple equation approach and found limited wave solutions in terms of trigonometric and rational functions for the ZKBBME, our work employs the TMFD for enhanced memory effects and provides physically rich profiles through diverse plotting formats. Unlike Baskonus and Gao56, who obtained dark, bright, and periodic waves with conformable fractional derivatives and the generalized exp-rational function method but lacked soliton type diversity and visual interpretation, our results encompass rational, trigonometric, hyperbolic, and exponential function based- solitons with detailed structure-specific graphs. While Zaman et al.57 used conformable derivative and the generalized tanh method to yield a few traveling wave forms without bifurcation or solution morphology, our framework generates complex soliton types, including cuspons and singular profiles. Akbar58 classified some wave types of this model using beta fractional derivative and the (\(\frac{F^,}{F},1/F\)) method, but without multi-format physical representation; our solutions are further validated through contour, density, and polar plots showing more soliton dynamics. Zhao and Li59 produced a limited range of wave structures studying bifurcation and chaos with conformable space–time fractional derivatives and used a polynomial complete discriminant system, whereas our approach reveals an extended taxonomy of solution types such as singular periodic bell-shaped, compacton-kink, and anti-peakon forms, exceeding the analytical solitons obtained by Hussain et al.60 for ZKBBM-type equations using the ansatz method, which lacked bifurcation mapping or rich physical interpretations; our results illustrate complex dynamic behaviors far beyond those reported previously.
Figure (1) presents the combo-dark-bright soliton of Equation (30).A combo dark–bright soliton is when a dip in one wave and a peak in another travel together as a single, stable shape. Figure (2) represents a bell shaped solution of Equation (31). A bell-shaped solution is a wave profile with a single smooth peak that tapers symmetrically on both sides, resembling the shape of a bell. Figure (3) depicts the kink solution of Equation (32). Kink solitons are wave solutions that connect two different constant states, forming a smooth step-like transition rather than a peak or dip. They typically appear in systems with nonlinearities that support such topological changes and move without changing shape. Equation (33) exhibits a singular bell shape shown in Figure (4). A singular bell shaped soliton is a peaked wave profile that looks like a bell curve but has a singularity such as an infinite or undefined value at its center while still decaying smoothly toward zero on both sides. Figure (5) shows singular periodic of Equation (36). Singular periodic solitons are wave solutions that repeat periodically in space or time but contain singular points where their amplitude becomes infinite or undefined within each period. Figure (6) illustrates the anti-kink wave profile solution of Equation (37), and Figures (7) and (12) display the peakon solutions of Equations (38) and (52), respectively. An anti kink wave profile is a smooth transition wave that connects two constant states in the reverse direction of a kink, moving from a higher state to a lower state instead of the other way around. A peakon is a type of solitary wave with a sharp, pointed crest and continuous slope changes, maintaining its shape and speed during propagation. Figure (8) demonstrates cuspon solutions for Equation (46). A cuspon is a solitary wave with a pointed cusp at its peak where the slope becomes infinite, but unlike a peakon, the wave remains smooth elsewhere. Figure (9) shows a singular periodic bell-shaped wave of Equation (47). Figure (10) represents the singular anti-kink of Equation (48). Figure (11) shows the bright soliton wave of Equation (49). Figure (12) show hyperbolic solutions of Equation (52). Figure (13) of Equation (53) exhibits a compacton-kink. A compacton kink is a kink shaped wave with compact support, meaning it connects two constant states over a finite region and is exactly zero outside that region. Figure (14) of Equation (54) shows peakon-bright. Figure (15) of Equation (55) represents peakon-dark, and Figure (17) of Equation (56) shows anti-peakon soliton. A peakon bright soliton is a localized wave with a sharp, pointed crest (peakon shape) rising above the background, while a peakon dark soliton is a pointed dip below the background level, both maintaining their shape and speed during propagation (Fig. 16).
Limitation and future work
Using a TMFD framework, the current study significantly advances the field by applying the modified exp-function method and exp\((-\Phi (\psi ))\)-expansion method to derive a variety of complex soliton solutions to the ZKBBME. However, there are still a number of significant research directions and inherent limitations that should be taken into account. Despite being useful for analytical tractability, TMFD may not have the same physical generality and interpretability as other well-known fractional operators like Caputo or Atangana-Baleanu. This is especially true when it comes to capturing memory effects and long-range dependencies in actual physical systems. Moreover, although effective in producing a variety of soliton structures, the employed solution techniques are intrinsically parameter-dependent and analytically limited to idealized circumstances; they might not perform well in non-autonomous, multi-dimensional, or stochastic settings. Confirming the stability, energy conservation, and long-term behavior of the obtained wave patterns is further limited by the lack of experimental validation or numerical simulation.
Future research can examine how the modified exp-function method and the exp\((-\phi (\psi ))\)-expansion method can be applied to couples like the Davey–Stewartson and Zakharov models, as well as understudied nonlinear fractional systems like the Benjamin–Ono, Degasperis–Procesi, and Ostrovsky equations. In higher-dimensional and physically realistic environments, these systems present new possibilities for building intricate soliton solutions and revealing rich bifurcation behavior. Future research can investigate the methodology’s extension to other nonlinear fractional PDEs, particularly in environments with variable coefficients, dissipative effects, or forcing. Furthermore, including numerical approaches, such as spectral or finite element methods, would aid in evaluating the solitons’ temporal evolution and validating the analytical results. Comparing the TMFD method with different fractional derivatives to assess their effects on soliton morphology and bifurcation structures is another exciting avenue. Last but not least, integrating the developed framework into real-world engineering systems–like fluid dynamics, plasma physics, or optical communication–can increase its applicability and close the gap between theoretical modeling and actual occurrences.
Conclusion
We successfully applied two analytical mathematical methods to derive novel wave solutions for the (1+1)-dimensional ZKBBME with TMFD. These solutions, expressed as simple rational, rational trigonometric, rational hyperbolic, and exponential functions, have significant applications in physics and applied domains. 2-D, 3-D, contour, density, and polar profiles illustrate the physical behavior of selected solutions. We have successfully uncovered a diverse spectrum of soliton solutions, including kink, anti-kink, bright, dark, bright-singular, and other distinct wave structures. These findings highlight the rich dynamical behavior and nonlinear characteristics embedded within the model. The results are novel and significantly advance existing literature. Based on the physical characterization of these results, we conclude that our analytical techniques are valuable resources for examining nonlinear wave problems in applied science. Furthermore, we studied the dynamical system of the (1+1)-dimensional ZKBBME, which has not been previously studied. The Galilean transformation was used to derive the dynamical system, followed by bifurcation analysis via planar dynamical system theory. This work demonstrates the modified exp-function and the exp\((-\Phi (\psi ))\)-expansion method’s versatility in tackling FNLPDEs, paving the way for further research in mathematical physics.
Data Availability
Data sharing not applicable to this article as no data sets were generated or analyzed during the current study.
References
Ahmad, S., Gafel, H. S., Khan, A., Khan, M. A. & Rahman, M. U. Optical soliton solutions for the parabolic nonlinear Schrödinger Hirota’s equation incorporating spatiotemporal dispersion via the tanh method linked with the Riccati equation. Opt. Quant. Electron. 56(3), 382 (2024).
Mathanaranjan, T. Exact and explicit traveling wave solutions to the generalized Gardner and BBMB equations with dual high-order nonlinear terms. Partial Diff. Equ. Appl. Math. 4, 100120 (2021).
Justin, M. et al. Sundry optical solitons and modulational instability in Sasa-Satsuma model. Opt. Quant. Electron. 54(2), 81 (2022).
Han, T., Zhang, K., Jiang, Y. & Rezazadeh, H. Chaotic pattern and solitary solutions for the (2+1)-dimensional beta-fractional double-chain DNA system. Fractal and Fractional 8(7), 415 (2024).
Han, T., Tang, C., Zhang, K. & Zhao, L. Chaotic behavior and traveling wave solutions of the fractional stochastic Zakharov system with multiplicative noise in the Stratonovich sense. Results Phys. 48, 106404 (2023).
Bilal, M. et al. Application of modified extended direct algebraic method to nonlinear fractional diffusion reaction equation with cubic nonlinearity. Bound. Value Probl. 2025(1), 16 (2025).
Han, T. & Jiang, Y. Bifurcation, chaotic pattern and traveling wave solutions for the fractional Bogoyavlenskii equation with multiplicative noise. Phys. Scr. 99(3), 035207 (2024).
Muhammad, J., Rehman, S. U., Nasreen, N., Bilal, M. & Younas, U. Exploring the fractional effect to the optical wave propagation for the extended Kairat-II equation. Nonlinear Dyn. 113(2), 1501–1512 (2025).
Khatun, M. M., Gepreel, K. A., & Akbar, M. A. Dynamics of solitons of the \(\beta\)-fractional doubly dispersive model: Stability and phase portrait analysis. Indian Journal of Physics, 1-16 (2025).
Asghar, U., Asjad, M. I. & Abdallah, S. A. O. Soliton dynamics in the fractional nonlinear model with applications in new photonic devices: U. Asghar et al. Quantum Studies: Mathematics and Foundations 12(2), 21 (2025).
Arefin, M. A., Zaman, U. H. M., Uddin, M. H. & Inc, M. Consistent travelling wave characteristic of space–time fractional modified Benjamin–Bona–Mahony and the space–time fractional Duffing models. Opt. Quant. Electron. 56(4), 588 (2024).
Khatun, M. A., Arefin, M. A., Akbar, M. A. & Uddin, M. H. Existence and uniqueness solution analysis of time-fractional unstable nonlinear Schrödinger equation. Results in Physics 57, 107363 (2024).
Arefin, M. A., Khatun, M. A., Islam, M. S., Akbar, M. A. & Uddin, M. H. Explicit soliton solutions to the fractional order nonlinear models through the Atangana beta derivative. Int. J. Theor. Phys. 62(6), 134 (2023).
Zaman, U. H. M., Arefin, M. A., Akbar, M. A. & Uddin, M. H. Study of the soliton propagation of the fractional nonlinear type evolution equation through a novel technique. PLoS ONE 18(5), e0285178 (2023).
Shahen, N. H. M., Rahman, M. M., Alshomrani, A. S. & Inc, M. On fractional order computational solutions of low-pass electrical transmission line model with the sense of conformable derivative. Alex. Eng. J. 81, 87–100 (2023).
Russell, J. S. Report on Waves: Made to the Meetings of the British Association in 1842-43 (1845).
Younas, U., Sulaiman, T. A., Ismael, H. F., Ren, J. & Yusuf, A. The study of nonlinear dispersive wave propagation pattern to Sharma–Tasso–Olver–Burgers equation. Int. J. Mod. Phys. B 38(08), 2450112 (2024).
Nasreen, N., Naveed Rafiq, M., Younas, U. & Lu, D. Sensitivity analysis and solitary wave solutions to the (2+ 1)-dimensional Boussinesq equation in dispersive media. Mod. Phys. Lett. B 38(03), 2350227 (2024).
Dutta, S., Chatterjee, P., Mondal, K. K., Nasipuri, S., & Mandal, G. Solitons and Resonance in Fractional Sawada-Kotera Equation Using Hirota Bilinear Method. In International Conference on Nonlinear Dynamics and Applications (pp. 172-185). Cham: Springer Nature Switzerland (2024, February).
Tasnim, F., Akbar, M. A. & Osman, M. S. The extended direct algebraic method for extracting analytical solitons solutions to the cubic nonlinear Schrödinger equation involving beta derivatives in space and time. Fractal and Fractional 7(6), 426 (2023).
Soliman, M., Ahmed, H. M., Badra, N. & Samir, I. Effects of fractional derivative on fiber optical solitons of (2+ 1) perturbed nonlinear Schrödinger equation using improved modified extended tanh-function method. Opt. Quant. Electron. 56(5), 777 (2024).
Saboor, A., Shakeel, M., Liu, X., Zafar, A. & Ashraf, M. A comparative study of two fractional nonlinear optical model via modified \(\frac{G^,}{G^2}\)-expansion method. Opt. Quant. Electron. 56(2), 259 (2024).
Sharif, A. Jacobi elliptic function approach to a conformable fractional nonlinear Schrödinger-Hirota equation. Part. Diff. Equ. Appl. Math. 8, 100541 (2023).
Ali, R., Zhang, Z., Ahmad, H. & Alam, M. M. The analytical study of soliton dynamics in fractional coupled Higgs system using the generalized Khater method. Opt. Quant. Electron. 56(6), 1067 (2024).
Murad, M. A. S. Analyzing the time-fractional (3+ 1)-dimensional nonlinear Schrödinger equation: a new Kudryashov approach and optical solutions. Int. J. Comput. Math. 101(5), 524–537 (2024).
Hassaballa, A. A. et al. Application of the Tanh-Coth and HSI methods in deriving exact analytical solutions for the STFKS equation. Front. Appl. Math. Stat. 11, 1568757 (2025).
Faridi, W. A., Bakar, M. A., Akgül, A., Abd El-Rahman, M. & Din, S. M. Exact fractional soliton solutions of thin-film ferroelectric material equation by analytical approaches. Alex. Eng. J. 78, 483–497 (2023).
Ozisik, M., Secer, A. & Bayram, M. On solitary wave solutions for the extended nonlinear Schrödinger equation via the modified F-expansion method. Opt. Quant. Electron. 55(3), 215 (2023).
Han, T., Liang, Y. & Fan, W. Dynamics and soliton solutions of the perturbed Schrödinger-Hirota equation with cubic-quintic-septic nonlinearity in dispersive media. AIMS Math 10(1), 754–776 (2025).
Mamun, A. A., Ananna, S. N., An, T., Shahen, N. H. M., & Asaduzzaman, M. Dynamical behaviour of travelling wave solutions to the conformable time-fractional modified Liouville and mRLW equations in water wave mechanics. Heliyon, 7(8) (2021).
Shahen, N. H. M. & Rahman, M. M. Dispersive solitary wave structures with MI Analysis to the unidirectional DGH equation via the unified method. Partial Diff. Equ. Appl. Math. 6, 100444 (2022).
Pandir, Y., Akturk, T., Gurefe, Y. & Juya, H. The Modified Exponential Function Method for Beta Time Fractional Biswas-Arshed Equation. Adv. Math. Phys. 2023(1), 1091355 (2023).
Shahen, N. H. M., Al Amin, M., Foyjonnesa, A. & Rahman, M. M. Soliton structures of fractional coupled Drinfel’d-Sokolov-Wilson equation arising in water wave mechanics. Sci. Rep. 14(1), 18894 (2024).
Shakeel, M. & Mohyud-Din, S. T. New \(\frac{G^,}{G}\)-expansion method and its application to the Zakharov-Kuznetsov–Benjamin-Bona-Mahony (ZK–BBM) equation. J. Assoc. Arab Univ. Basic Appl. Sci. 18, 66–81 (2015).
Ali, A., Iqbal, M. A. & Mohyud-Din, S. T. Solitary wave solutions Zakharov–Kuznetsov–Benjamin–Bona–Mahony (ZK–BBM) equation. J. Egyptian Math. Soc. 24(1), 44–48 (2016).
Torvattanabun, M. & Koonprasert, S. Exact traveling wave solutions to the Zakharov-Kuznetsov-Benjamin-Bona-Mahony nonlinear evolution equation using the vim combined with the improved generalized tanh-coth method. Appl. Math. Sci. 11(64), 3141–3152 (2017).
Salamat, N., Arif, A. H., Mustahsan, M., Missen, M. M. S. & Prasath, V. S. On compacton traveling wave solutions of Zakharov-Kuznetsov-Benjamin-Bona-Mahony (ZK-BBM) equation. Comput. Appl. Math. 41(8), 365 (2022).
Yu, J. Some new exact wave solutions for the ZK-BBM equation. J. Appl. Sci. Eng. 26(7), 981–988 (2022).
Iqbal, M. A. B. et al. Theoretical examination and simulations of two nonlinear evolution equations along with stability analysis. Results Phys. 58, 107504 (2024).
Akbulut, A., Kaplan, M. & Tascan, F. The investigation of exact solutions of nonlinear partial differential equations by using exp\((-\Phi (\xi ))\)-expansion method. Optik 132, 382–387 (2017).
Kumar, S., Niwas, M. & Mann, N. Abundant analytical closed-form solutions and various solitonic wave forms to the ZK-BBM and GZK-BBM equations in fluids and plasma physics. Part. Diff. Equa. Appl. Math. 4, 100200 (2021).
Baskonus, H. M., Yel, G., & Bulut, H. Novel wave surfaces to the fractional Zakharov-Kuznetsov-Benjamin-Bona-Mahony equation. In AIP Conference Proceedings (Vol. 1863, No. 1). AIP Publishing (2017, July).
Yépez-Martínez, H., Sosa, I. O. & Reyes, J. M. Feng’s First Integral Method Applied to the ZKBBM and the Generalized Fisher Space-Time Fractional Equations. J. Appl. Math. 2015(1), 191545 (2015).
Khater, M. M. & Baleanu, D. On abundant new solutions of two fractional complex models. Adv. Difference Equ. 2020(1), 268 (2020).
Hanif, M. & Habib, M. A. Exact solitary wave solutions for a system of some nonlinear space–time fractional differential equations. Pramana 94(1), 7 (2020).
Islam, M. N., Parvin, R., Pervin, M. R. & Akbar, M. A. Adequate soliton solutions to the time fractional Zakharov-Kuznetsov equation and the space-time fractional Zakharov-Kuznetsov-Benjamin-Bona-Mahony equation. Arab J. Basic Appl. Sci. 28(1), 370–385 (2021).
Khater, M. M. New traveling solutions of the fractional nonlinear KdV and ZKBBM equations with ABR fractional operator. Int. J. Mod. Phys. B 35(22), 2150232 (2021).
Sousa, J. V. D. C., & de Oliveira, E. C. A new truncated \(M\)-fractional derivative type unifying some fractional derivative types with classical properties. arXiv preprint arXiv:1704.08187 (2017).
AbdelSalam, H. M. Geometric Analysis and Enhanced Approach for Addressing the Generalized M-Truncated Space-Time Fractional Burgers Model. Appl. Math. 19(3), 531–540 (2025).
Batool, F. et al. Studying the impacts of M-fractional and beta derivatives on the nonlinear fractional model. Opt. Quant. Electron. 56(2), 164 (2024).
Chakrabarty, A. K., Roshid, M. M., Rahaman, M. M., Abdeljawad, T. & Osman, M. S. Dynamical analysis of optical soliton solutions for CGL equation with Kerr law nonlinearity in classical, truncated M-fractional derivative, beta fractional derivative, and conformable fractional derivative types. Results Phys 60(107636), 10–1016 (2024).
Özkan, A., Özkan, E. M. & Yildirim, O. On exact solutions of some space–time fractional differential equations with M-truncated derivative. Fractal and Fractional 7(3), 255 (2023).
Nouh, M. I. et al. Stellar structure via truncated M-fractional Lane-Emden solutions. Sci. Rep. 15(1), 12462 (2025).
Younas, U., Sulaiman, T. A. & Ren, J. Propagation of M-truncated optical pulses in nonlinear optics. Opt. Quant. Electron. 55(2), 102 (2023).
Ilhan, O. A., Islam, M. N. & Akbar, M. A. Construction of functional closed form wave solutions to the ZKBBM equation and the Schrödinger equation. Iranian Journal of Science and Technology, Transactions of Mechanical Engineering 45, 827–840 (2021).
Baskonus, H. M. & Gao, W. Investigation of optical solitons to the nonlinear complex Kundu-Eckhaus and Zakharov–Kuznetsov–Benjamin–Bona–Mahony equations in conformable. Opt. Quant. Electron. 54(6), 388 (2022).
Zaman, U. H. M., Arefin, M. A., Akbar, M. A. & Uddin, M. H. Stable and effective traveling wave solutions to the non-linear fractional Gardner and Zakharov–Kuznetsov–Benjamin–Bona–Mahony equations. Partial Differential Equations in Applied Mathematics 7, 100509 (2023).
Akbar, M. A. Assessment of assorted soliton solutions and impacts analysis of fractional derivatives on wave profiles. Results in Physics 49, 106501 (2023).
Zhao, S. & Li, Z. Bifurcation, chaotic behavior, and traveling wave solutions of the space–time fractional Zakharov–Kuznetsov–Benjamin–Bona–Mahony equation. Frontiers in Physics 13, 1502570 (2025).
Hussain, A., Zaman, F. D. & Ali, H. Dynamic nature of analytical soliton solutions of the nonlinear ZKBBM and GZKBBM equations. Partial Differential Equations in Applied Mathematics 10, 100670 (2024).
Acknowledgements
This work was supported and funded by the Deanship of Scientific Research at Imam Mohammad Ibn Saud Islamic University (IMSIU) (grant number IMSIU-DDRSP2503).
Funding
The authors received no external funding.
Author information
Authors and Affiliations
Contributions
Jamshad Ahmad: Resources, acquisition, Supervision, Writing - review and editing, Visualization, Validation. Khalid Masood: Writing - review and editing, Formal analysis, Validation. Fatima Ayub: Conceptualization, Methodology, Software, Writing - original draft. Nehad Ali Shah: Writing - review and editing, Formal analysis, Investigation. Jamshad Ahmad and Nehad Ali Shah contributed equally to this work and are co-first authors.
Corresponding author
Ethics declarations
Use of Generative-AI tools
The authors declare they have not used AI tools in the creation of this article.
Conflict of interest
The authors declare no conflict of interest.
Competing interests
The authors have no relevant financial or non-financial interests to disclose.
Ethics approval and consent to participate
Not Applicable.
Consent for publication
All authors have agreed and have given their consent for the publication of this research paper.
Additional information
Publisher’s note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution-NonCommercial-NoDerivatives 4.0 International License, which permits any non-commercial use, sharing, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if you modified the licensed material. You do not have permission under this licence to share adapted material derived from this article or parts of it. The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by-nc-nd/4.0/.
About this article

Cite this article
Ahmad, J., Masood, K., Ayub, F. et al. Bifurcation analysis and novel wave patterns to Zakharov–Kuznetsov–Benjamin–Bona–Mahony equation with truncated M-fractional derivative. Sci Rep 15, 35269 (2025). https://doi.org/10.1038/s41598-025-18160-1
Received:
Accepted:
Published:
Version of record:
DOI: https://doi.org/10.1038/s41598-025-18160-1
