
Abstract
In recent years, extreme weather events caused by climate change, such as ice storms, typhoons and earthquakes, have caused increasingly devastating damage to critical energy infrastructure. Emergency mobile resources can be matched with difference distributed power collocation, application fault active isolation, island reconstruction way to ensure the key load supply, however, limited by the distributed power resources under the time and space dimension of volatility, how to fully coordinate emergency mobile resources in power system load recovery has become a key technical problem to be solved. In view of the above problems, this paper proposes a two-disaster load recovery method for emergency mobile resources (Emergency Power Supply, EPS) and distributed power island. First, Put forward the pre-disaster EPS pre-dispatching method with balanced considering the mobile characteristics and operation cost; next, Based on the pre-disaster EPS pre-scheduling method, Establish the primary and secondary double objective functions from the aspects of cutting load and network loss, And normalized to the post-disaster island recovery scheduling model considering the collaborative application of EPS, fixed energy storage and distributed power island; last, Apply the proposed method to fault scenarios under improved IEEE-33 nodes and IEEE-69 nodes. The example shows that the proposed pre-post-disaster two-stage model can obtain the optimal EPS scheduling path and the best island division mode, In contrast to not considering pre-disaster pre-scheduling, It can restore the interrupt load more quickly and efficiently.
Similar content being viewed by others

Introduction
As the core of infrastructure, the power system’s reliable energy-supply capacity is of utmost significance for the orderly development of the social economy. However, extreme natural disasters induced by global climate change, such as earthquakes, typhoons, and floods, pose significant challenges to the global security of the power system. Effectively coordinating the utilization of distributed power resources and EPS to restore load interruptions caused by extreme faults and enhancing the survivability of critical loads in the power system under extreme natural-disaster scenarios have become urgent technical issues1,2,3.
With the in-depth integration of the power grid and the transportation network, fixed energy storage and EPS are extensively applied at the middle-and low-voltage ends of the power system. This can offer robust hardware support for the orderly allocation of load-recovery resources4,5. Compared with fixed energy storage, EPS can be applied in tandem with distributed-power-supply islands to restore critical loads. This further enhances the load-recovery flexibility of the active distribution network and strengthens the power system’s adaptability to and recovery from extreme faults within the power-system framework6,7.
Currently, scholars both at home and abroad have conducted research on diverse load-recovery resources in the distribution network. Regarding active islanding, Reference8 employs the second-order cone technique to transform the constructed model into a mixed-integer second-order cone planning model and proposes a fault-recovery method that encompasses both reconstruction and island division. Reference9 formulates the fault-recovery scheme for the fault-recovery area based on the fault-recovery paths of adjacent feeders. Reference10 puts forward a novel concept of optimizing the island-division mode according to distribution-network scenarios and selects different island-division modes for specific scenarios by taking several distribution-network scenarios as examples. Nevertheless, although active islanding can optimize resource allocation and improve power-supply resilience, it lacks flexible adjustment capabilities. In the face of system uncertainties, such as the fluctuation of photovoltaic output, it cannot achieve a rapid response after a disaster, resulting in a lower resource-utilization rate. In terms of EPS optimization scheduling, EPS systems as a resource for load restoration. In island mode, it can work in conjunction with distributed power sources. This cooperation effectively mitigates the impact scope of faults. Synergistic application has two benefits. First, it improves the power system’s adaptability to extreme faults. Second, it significantly enhances the system’s resilience. This ensures rapid and reliable power restoration during disasters. As a result, outage durations and economic losses are reduced. Reference11 proposes a MILP model to co-optimize distribution system processes (patrolling, fault handling, load re-energization), addresses the data exploration vs. fault repair dilemma, dynamically adjusts crew dispatch, presents a conservative power flow constraint set, and verifies it on IEEE 123/8500-node systems. Reference12 considers how typhoons’spatial and temporal evolution affects distribution network line faults. Based on scenario probabilities, this study proposes a robust optimization method. The method is for configuring and operating EPS in distribution networks. Reference13 proposes a deep reinforcement learning-based DMR dispatching method (with a hurricane model and double deep Q-network) to enhance power system resilience post-disasters, verified on 6/33 bus systems. Reference14 proposes an integrated restoration coordination formulation (service restoration, crew/EV dispatch, DER control) with a routing-based model (novel EV dispatch via SOC tables) and verifies it on the modified IEEE 123-node system. Reference15 proposes a three-stage hierarchical model to enhance decentralized microgrid (DC-MG) resilience (addressing emergency outage challenges from poor information sharing) and verifies on the 118-bus network that it reduces ENS and improves critical load supply/resilience index. Reference16 establishes a robust dispatching model for the collaborative optimization of emergency-power-vehicle dispatching and emergency-repair sequences. The introduction of EPS provides flexible energy-regulation capabilities, which helps reduce the system’s operation risks. However, it also brings about the problem of effective deployment within the transportation network17. Existing literature rarely considers the high mobility of EPS, namely the differentiated layout of EPS before and after the occurrence of extreme faults, as well as the collaborative application of EPS with other load-recovery resources such as fixed energy storage and distributed-power- supply islands18.
In summary, two primary issues exist in current research on island-recovery considering mobile-resource scheduling.
On one hand, the spatio-temporal volatility of distributed power generation makes it challenging to respond promptly during extreme faults, rendering the power system less resilient to potential disasters. Photovoltaic output is significantly influenced by sunlight conditions, weather changes, and other factors, exhibiting notable volatility and intermittency. It is of particular importance to mitigate the adverse effects of photovoltaic-output fluctuations on load recovery under extreme faults and design more flexible operation strategies to enhance emergency-response capabilities19,20.
On the other hand, extreme faults span the pre-disaster and post-disaster phases. Different load-recovery resources possess distinct operating characteristics and regulation methods in these two phases21,22. For EPS, simply conducting emergency dispatching of mobile resources after an extreme fault occurs fails to fully leverage its flexibility. Load-recovery scheduling should be implemented in stages, taking into account the characteristics of both the pre-and post-disaster phases, and an effective solution needs to be proposed23.
To address the above scientific issues, focusing on the pre-disaster and post-disaster load recovery of distribution networks under deterministic fault scenarios, this paper proposes a two-stage load recovery model for the collaborative application of EPS and distributed power islands. There are three main contributions.
-
1.
Based on the preset deterministic disaster scenario, a clear boundary framework for pre-disaster prevention and post-disaster recovery is established, providing a targeted research foundation for the collaborative scheduling of load recovery resources.
-
2.
Considering the mobility characteristics and operation costs of EPS, a pre-disaster EPS pre-scheduling model is constructed to optimize the initial deployment position of EPS, which lays a hardware foundation for shortening the response time of post-disaster load recovery and improving the flexibility of resource scheduling.
-
3.
To restore more critical loads, this study comprehensively considers load shedding and network losses and proposes a post-disaster island restoration scheduling model. The original nonlinear constraints in the proposed model are relaxed into a mixed-integer quadratic cone optimization (MISOCP) problem, thereby achieving efficient solution. Finally, the method is validated through fault scenarios in the improved IEEE 33-node system and 69-node system, utilizing commercial solvers for efficient computation, thereby verifying the effectiveness of EPS and distributed power sources in improving load restoration efficiency.
Distribution network scenario framework description
Active power distribution network scenario framework
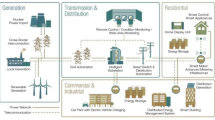
The large-scale integration of distributed power resources endows the active distribution network with more flexible and effective fault-recovery strategies, offering new methods and opportunities to enhance the resilience of the distribution network. As depicted in Fig. 1, the active distribution network is a small-scale power generation and distribution system. It consists of fixed power-system energy storage (Energy Storage of Power System, ESS), photovoltaic power supply (Photovoltaic, PV), residential power loads, AC/DC drives, protection devices, and so on. It is an autonomous system capable of self-control, self-protection, and self-management.
The distributed power sources in the active distribution network can be classified into two categories. One is the uncontrollable distributed generation (DG), such as wind turbine (WT) power generation and PV power generation. These sources are characterized by high volatility and are difficult to regulate. The other is the controllable DG, including ESS, diesel engines, and gas turbines. Their output power is relatively stable, and they can adjust their output according to the changes in other power supplies and loads in the network. Moreover, through a comprehensive control strategy, they can maintain the voltage and frequency stability within the island[24].
When the distribution system is hit by extreme disasters, the load-recovery resources in the active distribution network collaborate to maintain the stability of the distribution-network system. Specifically, during a grid failure, ESS can release energy, providing temporary power support for critical loads[25]. This helps to smooth out power supply-demand fluctuations and maintain the stability of the power grid. In the event of a main-grid failure, PV can cooperate with ESS to form an isolated island, ensuring the basic power-supply requirements of local critical loads. Additionally, the EPS can isolate the fault area, prevent the spread of faults, and supply continuous power to critical loads, thus ensuring their normal operation[26].

Active distribution network scenario architecture.
The fault isolating switches addressed in this study specifically refer to sectionalizing switches installed at the beginning and end of each line. This configuration aligns with the intelligent upgrade trend of modern active distribution networks (e.g., State Grid’s 14th Five-Year Plan for Distribution Network Intelligence). It should be noted that some low-voltage distribution networks have yet to fully deploy such remotely controlled switches[27,28]. This research scenario focuses on medium-voltage active distribution networks, with future expansion planned for scenarios with limited switch configurations.
Assumptions and scope
This study focuses on load restoration strategies following fault isolation. Fault locations can be identified through pre-disaster risk assessments (based on historical ice storm and typhoon data) and post-disaster real-time monitoring. Restoration time references the average repair duration under extreme disasters specified in the “Guidelines for Emergency Repair of Distribution Network Faults.”
Meanwhile, this study employs scenario-based deterministic analysis to simplify initial model validation. The PV output prediction curve integrates historical irradiance decay patterns with meteorological data, while load data utilizes typical daily load curves.
Assuming EPS has sufficient time prior to a disaster to complete pre-scheduling, aligning with the early warning window characteristics of extreme disasters, the initial fully-charged state references the standard energy storage configuration of emergency power vehicles.
Load recovery resources of the active power distribution network
In light of the function of cooperative fault recovery among diverse systems within the fault scenario of an active distribution network, a load-recovery resource model is devised. This model primarily centers on ESS, EPS, and distributed- power islands.
Fixed energy storage system model
The fixed energy storage system can realize the load supply within a certain range through orderly charging and discharging. The charging and discharging model is represented by the charging state (State-of-Charge, \(SOC\)), and its mathematical model can be expressed as follows:
In order to prevent ESS overcharge or over discharge, the state of SOC and charge and discharge power per unit period, which can be expressed as:
where \(SO{C_{k,t}}\) is the state of charge of the energy storage system with the fixed energy storage in the t period; \(\Delta t\)is the time step, and\(\Delta t\) = 1 h; \(P_{{k,t}}^{{ch}}\)and \(P_{{k,t}}^{{dch}}\)are the charge and discharge power of the fixed energy storage in the t period; \({E_k}\)is the total ESS capacity in the system. \({M_E}\) is the set of ESS in the system; \(SOC_{k}^{{\hbox{min} }}\)and \(SOC_{k}^{{\hbox{max} }}\)are the minimum and maximum of the charged state of the energy storage system. \(P_{{k,t}}^{{ch{\text{ max}}}}\)and\(P_{{k,t}}^{{ch{\text{ max}}}}\)are the maximum and minimum charging and discharging power of the energy storage system Value; \(\varphi _{{k,t}}^{{dch}}\)and\(\varphi _{{k,t}}^{{ch}}\)are 0–1 variables. If the energy storage system is charged \(\varphi _{{k,t}}^{{ch}}\)= 1; otherwise \(\varphi _{{k,t}}^{{dch}}\)= 1.
The EPS scheduling model
EPS is a power-support device tailored for critical loads. Its purpose is to guarantee the rapid provision of power support when a main-grid failure occurs..
The EPS scheduling model aims to maximize the vehicle’s effectiveness within the power grid through precise calculations. Initially, this model takes into account the spatio- temporal responsiveness of the EPS system. By analyzing traffic conditions and predicted travel times, it ensures that vehicles can reach charge-and-discharge stations punctually. Subsequently, it considers the EPS configuration within island divisions, enabling EPS to function as the main power source in the island efficiently and reliably.
EPS Temporal and Spatial scheduling characteristics
The EPS system proposed in this paper integrates the battery energy storage unit on the truck, thus giving it the ability to flexibly charge and discharge across regions. Therefore, the space-time characteristics of EPS need to clearly indicate the moving characteristics of EPS and the connection state with the power line. In order to fully express the space-time state of EPS, 0–1 variables \({\delta _{it}}\)、\({\varepsilon _{it}}\)、\({\Re _{it}}\)、\({\partial _{ijt}}\)、\({\varphi _{it}}\)are introduced in this paper, And construct the following constraints:
where \({\partial _{ijt}}\)indicates whether EPS is scheduled from i to j at time t, which is 1 if it is being scheduled and 0 if it is not. \({\Re _{it}}\)indicates whether it is docked on node i at time t. If it is docked at node i, it is 1, otherwise it is 0. \({\delta _{it}}\) indicates whether EPS leaves node i at time t. If EPS is leaving, it is 1; otherwise, it is 0. \({\varepsilon _{it}}\)indicates whether EPS reaches node i at time t. If EPS reaches node i, is 1; otherwise, it is 0. \({\varphi _{it}}\)it is an auxiliary 0–1 variable and has no practical significance; \({\Omega _b}\)is the set of all nodes.
Equation (6) indicates that the EPS arrival and departure node are consistent with the specific location identification; Eq. (7) indicates that an EPS can only appear on one load node and will not appear on any load node when the EPS scheduling process; Eq. (8) indicates the state after the vehicle leaves the load node; Eqs. (9) and (10) are used to restrict the consistency between the arrival and departure of the EPS to avoid confusion.
Among them, the minimum time in the EPS scheduling process consists of three parts, as shown in (11) :
where \({T_{ij,t}}\)represents the total scheduling time of EPS between two nodes during a given time period; \({T_{D,t}}\)indicates the time required for EPS to disconnect on node i. \({T_{M,t}}\) is the transportation time between load nodes; \({T_{C,t}}\)Indicates the time required for EPS to be connected to node j.
Equation (12) is used to restrain the direct running time of EPS at two nodes, and (13) is used to restrain the rational vehicle arrival and departure time
EPS configuration features
After the failure, the emergency electric vehicle receives the instruction from the dispatch center and goes to the designated place to connect to the power grid and act as a backup power supply. Each emergency electric vehicle is the main power source in the island, and its connection point should belong to a particular island:
where \({z^{si}}\)is configured with variable 0–1 for EPS, and \({z^{si}}\)equal to 1 indicates that EPS is connected to node i; If \({z^{si}}\)is 0, EPS is not connected to node i; \({a^{is}}\)divides 0–1 variables into node islands; \({a^{is}}\)=1 Node i belongs to island s; \({a^{is}}\)=0 Node i,does not belong to island s.
Distributed power supply Island model
Distributed power supply island refers to the local independent operation of the power system composed of one or more distributed power sources (such as solar photovoltaic, wind energy, fixed energy storage, etc.) and their supplied load when the main power grid fails or is unavailable. This configuration can guarantee the power supply of local key loads when the backbone of the grid fails, and improve the resilience and reliability of the grid.
The distributed power supply island model mainly considers two aspects. On the one hand, how to effectively divide the power grid into several islands to realize fault isolation and load recovery, on the other hand, how to effectively manage the power flow within the island to realize the reasonable distribution of power and voltage stability, that is, the balance characteristics of the island power flow.
Island active division characteristics
When partitioning islands, ensure that each node in the system belongs to only one island.
where S is the set of all divided islands.
When the line (i, j) belongs to the island range of the division, then the nodes i, j must belong to the island range of the division.
where \(b_{{ij}}^{s}\)is the division variable of branch island, and\(b_{{ij}}^{s}\) = 1 indicates that branch (i, j) does not belong to island s; Otherwise, it does not belong to the island. \({\Omega _l}\)indicates the collection of all lines in the system.
Let \({x_{ij}}\)represent the on-off state of line \(ij\), so that:
where \({x_{ij}}\)represents the 0–1 variable of the recovery decision of line \(ij\). If\({x_{ij}}\)is equal to 1, it means that line \(ij\) resumes operation; otherwise, it means that line \(ij\) is removed from the system.
Balance characteristics of Island tidal flow
Using the linearized DistFlow formula, establish the active distribution network power flow equation with ESS.
where \(g( \cdot ,i)\)and\(g(i, \cdot )\)represent the branch sets of power inflow and outflow node i respectively. \(P_{{i,t}}^{L}\)is the active power of node in the period; \(P_{{k,t}}^{{ESS}}\)is the active power of the ESS in the t period; \(P_{{k,t}}^{{EPS}}\)is the active power of the EPS in the t period; \({s_{i,t}}\)is the load connection state; \({P_{i,t}}\)represents the active power demand of the i load in the t period; If the i th load is restored by ESS or EPS within t period, si,t=1; otherwise, si,t=0; \(Q_{{i,t}}^{L}\)is the reactive power of node i in the period t; \(Q_{{k,t}}^{{ESS}}\)and \(Q_{{k,t}}^{{EPS}}\)are the reactive power of the ESS and EPS in the t period, respectively. \({Q_{i,t}}\)represents the reactive power demand of the I load in the t period; \({x_{i,j,t}}\)is the binary variable representing the branch. When the power flow changes from node i to node j in the period t, \({x_{i,j,t}}\)is 1; otherwise, it is 0. \({R_{ij}}\)and\({X_{ij}}\)are the resistance and reactance of branch \(ij\) respectively. \(P_{{g,t}}^{L}\) is the active power of branch g in the t period; \(Q_{{g,t}}^{L}\)is the reactive power of branch g in the t period; \({U_{i,t}}\)is the voltage of node i in time period t; \({U_1}\)is the reference voltage, which is 1. \({I_g}\)is a set of nodes directly connected by branch g. \({I_{ij,t}}\)is the branch current; \({I_{ij,\hbox{max} }}\) is the upper limit of the branch current.
M is an infinite constant, and the voltage is decoupled by BIG-M method. \(\sigma\)is the voltage deviation, 5% in this paper.
There is a nonlinear constraint equation among voltage, current, and power. This equation is processed using the second-order cone relaxation method. The processed result is transformed into the following second-order cone constraints:
Equation (26) serves as the core constraint of MISOCP. Together with other constraints in the paper, it collectively forms a mixed-integer second-order cone program.
Pre-disaster-disaster two-stage fault recovery
Based on the load recovery resource model of active distribution network, the pre-disaster and post-disaster load recovery method of collaborative application of EPS and distributed power supply island is established.
EPS pre-configuration optimization scheduling
In comparison to fixed energy storage, EPS exhibit higher mobility. When extreme faults occur, EPS can be rapidly dispatched to critical load nodes after the fault area is isolated by smart switching devices to prevent fault propagation. By supplying continuous power to critical loads in non-faulty zones, EPS ensure their normal operation. Economy represents a crucial aspect of the EPS spatio-temporal dispatching model. Consequently, this paper formulates a pre-disaster EPS pre-dispatching method for active distribution networks, taking into account the mobility characteristics and operating costs. The objective is to consider the multi-dimensional operating costs of EPS during the pre-dispatching stage. This approach aims to minimize load-shutdown losses and reduce dispatching costs.
Based on the above requirements, establish the objective function of EPS scheduling:
where \({{\text{F}}_t}\)represents the objective function of comprehensive income; \({\Pi _{re,t}}\) represents charge and discharge income based on real-time electricity price and demand response; \({\Pi _{sh,t}}\)represents additional revenue under the sharing economy model; \({C_{op,t}}\)stands for EPS mobile operating costs; \({C_{d,t}}\) indicates EPS battery loss cost.
where T is the set of scheduling time; \({\theta _{it}}\)is the electricity price of the node at time t; \(P_{{i,t}}^{{ch}}\)and\(P_{{i,t}}^{{dch}}\) are respectively the charging and discharging power of load node i at time t.
where \({R_{n,t}}\)is the rate paid by user n during a given period based on usage, and \({S_{n,t}}\)is the actual usage of user n within a time period. \({C_{sh,t}}\)is the additional maintenance cost in the shared mode, including user support and billing system maintenance; N Indicates the total number of users.
where \({c_{op}}\)is the usage cost per unit time.
where \({c_d}\)is the cost of unit battery capacity attenuation; \({\ell _t}\) is the fixed attenuation capacity (MWh) of the battery per day.
Post-disaster Island recovery
The island-recovery model serves as a response strategy for the distribution network under extreme conditions, such as large-scale power outages. In this study, it is assumed that the energy storage systems connected to the active distribution network comprise PV systems, ESS and EPS. Herein, a primary -secondary objective-function is formulated for optimization, with the main objective-function being prioritized. In the first layer, the island range is determined based on the distribution location of emergency electric vehicles. In the second layer, an optimal load-shedding strategy is sought within a given topology and under a given PV-output scenario to minimize the load-shedding amount. The secondary objective-function aims to minimize the sum of all network losses during the fault period.
The main objective functions is as follows:
where \({\omega _i}\) represents the load importance of node i; \({y_i}\)= 1 indicates that node i is removed, and \({y_i}\)= 0 indicates that node i falls into the operating range of the island. \(P_{{i,t}}^{D}\)represents the active load of load node i; \({x_{ij}}\),\(b_{{ij}}^{s}\),\({z^{si}}\),\({a^{is}}\) are the first layer decision variables, which determine the location of EPS distribution points. \(P_{{g,t}}^{L}\),\(Q_{{g,t}}^{L}\),\({U_{i,t}}\)is the second layer decision variable, the purpose is to find the optimal cut load minimum.
where \({P_{l,t}}\) is the load demand deficit of the system within time period t; \({F_2}\) is the secondary objective function, representing the total network loss of the system during the failure period.
The weight coefficient\({\omega _0}\)is used to normalize the primary and secondary objective functions. The weight coefficient is defined by itself and should not be too large. Setting different weight coefficients will get different recovery strategies. As a rule of thumb, this article is set to 0.2. Thus, the total integration objective function is obtained:
Pre-disaster-post-disaster two-stage model strategy process
The island recovery model considering EPS optimized scheduling is as follows:
After obtaining the topology structure of IEEE distribution network, input the basic parameters of load, PV, ESS, EPS, determine the fault branch, fault time and fault duration; and finally solve the pre-disaster-disaster model; The specific process is shown in Fig. 2.

Flow chart of two-stage fault recovery in pre-disaster and post-disaster phases.
Example analysis
Simulation and calculation examples
In this paper, the improved IEEE-33 node distribution network is used for simulation analysis in MATLAB. The topology of the improved IEEE-33 node distribution network is shown in Fig. 3. There are 38 branches, 1 power source where the base voltage is 12.66 kV, the base power is 10 MVA, the total network load is 2182 + j1256kVA, the key total load is 1210 + 560 kVA, and the voltage deviation is 5%. Two EPS scheduling resources, 5 ESS and 5 photovoltaic power sources; the maximum active power of ESS1, ESS2 and ESS3 is 120 kW, and the maximum active power of ESS4 and ESS5 is 100 kW. The specific connection mode is shown in figure. The red point in the figure is the important load, and the load importance\({\omega _i}\)is 10; the green point is the non-important load, and the load importance\({\omega _i}\)is 1. The specific parameters of EPS are shown in Tables 1 and 2, and the specific parameters of the peak photovoltaic power generation during normal operation and the output prediction curve after disasters are shown in Table 3; Fig. 4. The post-disaster prediction curve in Fig. 4. integrates historical irradiance decay patterns from similar disaster events and detailed meteorological data provided by the local meteorological bureau, ensuring that the characteristics of the distribution of photovoltaic power output over time after the disaster are accurately reflected. For example, PV1 reaches 60% of the peak at 8:00, that is, 72 kW.
In this paper, extreme disasters similar to the full coverage of ice and snow occur suddenly at 4 points, which makes the lines between the four nodes of 3–4,7–8,12–22 and 28–29 fail, as shown in Fig. 3. After the disaster, the actual road distance between both electrical nodes is assumed to be 3 km. It is expected that the time to the normal operation of the distribution network is 10 h. EPS is also assumed at full charge; EPS has sufficient time to configure to pre-arranged nodes before the disaster.

Topology of improved IEEE-33 node distribution network.

Prediction curve of photovoltaic output after a disaster.
Pre-disaster pre-dispatch results
Based on the system operation parameters and photovoltaic power-generation parameters, the pre-layout phase scheme of the designed EPS before a disaster is presented in Table 4. This scheme assumes the same degree of failure in the same line prior to the disaster. The difference is as follows: In Scheme 1, EPS pre-arrangement through optimal scheduling is not considered, and two EPS units are fixed at node 1 for power supply. In contrast, Scheme 2 takes into account EPS pre- arrangement via optimal scheduling. The comprehensive benefits in Table 4 encompass charge-and-discharge benefits, battery maintenance costs, mobile-resource scheduling costs, and system maintenance costs.
In Scheme 1, the EPS scheduling resources are fixed at the starting node 1. While this approach can cut down on EPS resource-scheduling costs, the charge and discharge benefits are diminished because the EPS fixed at node 1 provides limited electrical energy to all faults. As a result, the comprehensive income of Scheme 1 amounts to 3,156 CNY. In contrast, in Scheme 2, the EPS is optimized considering the node-load power and its significance, with pre-arranged distribution to node 12 and node 24 respectively. Although the EPS scheduling cost rises, the benefits it brings to the fault load are substantially greater compared to Scheme 1. Consequently, the final comprehensive income increases by 38.4%.
Evidently, the pre-disaster EPS pre-scheduling strategy proposed in this paper notably boosts the comprehensive benefit of EPS scheduling in the distribution network.
Island recovery after a disaster
After natural disasters occur, the distribution network relies on the cooperation of various distributed power sources to supply power to the failed loads. The relationship between the access-node positions and time of two EPS units is depicted in Fig. 5. From the figure, it can be seen that after the failure, EPS1 and EPS2 were pre-laid at nodes 12 and 24 before the disaster. Due to the variation in photovoltaic output caused by changes in light intensity, EPS undergoes continuous optimization in scheduling over time to meet the load-power- supply demand.

EPS access position diagram at different times after the disaster.
The relationship between the node positions after EPS optimization scheduling, the load demand, and the charge-and- discharge power and time of the two EPS units is presented in Fig. 6. A negative power indicates a discharging state, while a positive power represents a charging state. It is evident that most of the time, the two EPS units are in a discharging state. Only when the light intensity is high at noon does the photovoltaic output reach a stable state or enter a charging state; The graph also shows the state of charge of the two EPS units as a function of time, It can be clearly observed from the figure that the charge states of EPS1 and EPS2 decline over time after the failure, and a stable or charging state only occurs at noon.

Charge/discharge power and state of charge for the full EPS time period.
The load line diagram of the distribution network supply over a 24-hour period is shown on the left side of Fig. 7, As is evident from the figure, when a failure occurs at 4 o’clock, the total power of the distribution network load decreases to approximately 50% of the normal level. After island recovery is achieved through the coordinated dispatching of EPS, along with ESS and PV, the load power returns to 82% of the normal level at 13:00 on the same day. Moreover, the recovery percentages of important and non-important loads are distinguished.As shown on the right-hand side of Fig. 7, the recovery ratio of important loads shown is significantly higher than that of non-important loads. Generally, the recovery rate of important loads is around 80% and can even reach 85%. This verifies that the recovery method proposed in this paper ensures the normal operation of most important loads.

Full-time power supply load total power and load recovery rate.
As depicted in Fig. 8, during the instant of disaster occurrence and the post-disaster recovery stage, two EPS units are connected at node 12 and node 24 in accordance with Scheme 2. Consequently, the distribution network is partitioned into three isolated configurations..

Considers the island recovery results of EPS scheduling.
The power of the ESS-based power distribution network is illustrated in Fig. 9. The power outputs of ESS 1, ESS2, and ESS3 remain constantly at 120 kW, while those of ESS4 and ESS5 are stably at 100 kW. Evidently, the power-supply outputs of all fixed energy storage units reach their peaks during the fault period.

Output power of ESS during the disaster recovery phase.
Based on the above results, during the period from 4 to 6 o’clock after the failure, due to insufficient light, photovoltaic output is low. As a result, all ESS supply power at their maximum active power. Simultaneously, EPS1 is relocated from the pre-configured node 12 to node 31 for power supply, and EPS2 moves to node 7 for power supply one hour after leaving the pre-configured node 24. As ESS and EPS supply power to important loads, the reduction in important loads is minimal, and the recovery percentage reaches 82%. This validates that the two-stage recovery strategy proposed in this paper endows the distribution network with good resilience after a failure..
From 8 to 10 o’clock after the fault, as the light gradually intensifies, photovoltaic power generation increases steadily, causing the overall power supply to show an upward trend. The recovery percentage of important loads is approximately 85% at this time. At this moment, EPS1 moves from node 31 to node 12, and EPS2 reaches node 8. From 10:00 to 12:00 after the fault, photovoltaic output gradually peaks. EPS1 is transferred from node 8 to node 6 to supply power to the island lacking photovoltaic power-supply support. Except for the node voltages at the connections of distributed power supplies such as ESS, the voltages of other nodes experience significant fluctuations. However, distributed power supplies such as EPS and ESS provide part of the load power, endowing the voltage at each node with a certain supporting capacity. The voltage remains within a reasonable fluctuation range, thus verifying that the strategy proposed in this paper maintains the stability of the distribution network system..
From 12 to 14 o’clock after the fault, EPS2 reaches node 27, while EPS1 remains at node 6. Although photovoltaic power- generation capacity declines, the power-supply capacity of EPS1 and EPS2 for important loads improves significantly, leading to a slight increase in the overall power-supply load power. The recovery percentage of important loads in this period is as high as 85%, indicating that the system’s fault- recovery ability reaches a high level, and the percentage of significant load recovery is at its peak at this time.
Comparison of different recovery strategies
To validate the merits of the proposed two-stage mobile energy storage scheduling strategy for distribution networks, four recovery strategies are established. These strategies are determined by whether the mobile energy storage location is pre-arranged before a disaster and the distinct mobile energy storage scheduling methods adopted after the disaster. Simulations are then conducted for the three distribution network fault scenarios presented in Table 5. In Strategies 1 and 2, mobile energy storage is fixedly deployed at Root Node 1. Strategy1 does not perform mobile energy storage scheduling, while Strategy 2 performs subsequent EPS optimization scheduling to support the distribution grid. In Strategy 3, mobile energy storage only performs a single pre-deployment location scheduling and does not perform subsequent EPS optimization scheduling. Strategy 4 represents the strategy advocated in this paper. Algorithm parameters remain consistent with those described above. Additionally, for comparison purposes, the number of mobile energy storage units used in the post-disaster recovery phase for Strategy 1 and Strategy 2 is the same as that for Strategy 3 and Strategy 4. The recovery ratio curves of important loads for each strategy are calculated from the recovered important load power in each time period, as depicted in Fig. 10. Table 6 details the load curtailment costs of each recovery strategy under different fault scenarios.

Critical load recovery ratio curves for each strategy.
Regarding the load reduction cost, when compared to the unoptimized scenario, Strategy 1 achieves a 29.51% reduction, Strategy 2 reduces by 6.56%, and Strategy 3 shows a 16.62% decrease. In terms of the important load recovery effect, the pre -disaster model takes into full account the spatial distribution of loads and the output conditions of distributed power sources. The pre-calculated layout points of mobile energy storage are situated around key nodes that have a higher risk of load loss.
Based on this, in Strategies 3 and 4, which combine pre- disaster layout with post-disaster recovery, the mobile energy storage can rapidly access key nodes. This significantly lessens the reduction of important loads during the pre-fault period and effectively strengthens the resilience of the distribution network. In this particular example, the transportation distance between root node 1 and critical load node 24 is relatively short. As a result, in Strategy 2, the mobile energy storage can reach node 24 promptly. This leads to a substantial reduction in critical load curtailment in Strategy 2 compared to Strategy 1, two hours after the fault occurs.
Furthermore, both Strategy 2 and Strategy 4 support the dynamic scheduling of mobile energy storage. This enables the optimal allocation of energy in both the temporal and spatial dimensions, fully tapping into the potential of multiple distributed resources. Consequently, in the later stage of the fault, the recovery ratios of important loads under these two strategies are high, with the overall ratio reaching over 91%.
Extensible analysis
To further validate the scalability of the algorithm proposed in this paper, this section simulates and analyzes a larger-scale arithmetic system—the improved IEEE-69 node system. Figure 11. shows the network topology of the 69-node system. The detailed parameters of the system are listed in Reference27, and the system includes three EPS scheduling resources, whose specific parameters are shown in Tables 7 and 2. The specific parameters of peak photovoltaic power generation during normal operation and the post-disaster output prediction curve are consistent with those described earlier.
In this paper, an extreme disaster similar to widespread freezing and snowfall suddenly occurs, causing the system to disconnect from the main grid and resulting in line failures between the four nodes 5–6, 15–16, 45–46, and 57–58, as shown in Fig. 11. After the disaster, the actual road distance between both electrical nodes is assumed to be 3 km. It is expected that the time to the normal operation of the distribution network is 10 h. EPS is also assumed at full charge; EPS has sufficient time to configure to pre-arranged nodes before the disaster.

Topology of improved IEEE-69 node distribution network.
Table 8 presents the impact effects. These effects involve economic cost, total load curtailment, and critical load recovery rate. Under the conditions of Strategy 4, preconfigured EPSs with different quantities are compared. Table 9 presents a comparison. The comparison focuses on total load curtailment and critical load recovery rates. It is conducted for different example system scenarios, specifically Strategy 1 and Strategy 4.
When examining the impact of EPS configuration quantity on distribution grid performance, detailed analysis of the data in Table 3 leads to the following conclusions. As the number of energy storage units increases from 0 to 3, a remarkable trend is observed. The percentage of critical load restoration surges from 50.72% to 92.79%, demonstrating a substantial improvement in ensuring the power supply to critical loads. Concurrently, the overall load reduction decreases significantly from 11,772 kWh to 6281 kWh, indicating enhanced network resilience in handling power deficits. In terms of the total economic cost, it descends from 12,757 CNY to 7653 CNY, reaching the lowest point at an EPS count of 3. However, when the number of EPS further rises from 3 to 5, the growth rate of the critical load restoration percentage decelerates markedly, with only marginal increases of 0.41% and 0.66% for 4 and 5 units respectively. Similarly, the decline in overall load reduction becomes less pronounced. Moreover, the total economic cost starts to climb back up to 8368 CNY and 9071 CNY for 4 and 5 units respectively..
In conclusion, the data clearly shows that an EPS number of 3 strikes an optimal balance. It not only enables a high level of critical load restoration and significant load reduction but also minimizes the total economic cost. With fewer than 3 units, the load curtailment is large and the critical load restoration rate is low. With more than 3 units, the economic return diminishes, and the distribution grid performance improves only slightly.
As can be seen from Table 9, when the typhoon causes the most serious distribution line faults, under Strategy 4, the total power loss of the 33-node system and 69-node system is reduced. The reduction for the 33-node system is 51.25%. That for the 69-node system is 46.64%. Compared with Strategy 1, and the proportion of the important loads recovered from each node system underStrategy 4 reaches 92. 47% and 91. 68%, respectively. By comparing the above data, The two-stage EPS scheduling strategy proposed in this paper has a dual effect in large-scale systems. First, it significantly reduces full-time load power losses. Second, it maintains a high level of critical load support.
Conclusion
In this paper, an improved IEEE33-node active distribution network system model is adopted as a case study. Considering the differences before and after disasters, a pre-disaster and post-disaster load-recovery method for the collaborative application of EPS and distributed-power islands is proposed. The proposed approach is applied to the N-5 fault within the active distribution network model. The example demonstrates that, compared with pre-disaster pre-scheduling, the proposed two-stage pre-disaster model can yield the optimal EPS scheduling path and the best island-division path, thereby effectively restoring the outage load..
The example results indicate the following:
1) The EPS optimized-dispatching model established in this paper, following EPS pre-disaster pre-layout, effectively enhances the comprehensive benefits of dispatching resources in the event of a power-distribution network failure. Its dynamic dispatching strategy also increases the percentage of important-load power-consumption recovery after the failure.
2) In this paper, an island-recovery optimization model with primary and secondary dual-objective functions for post- disaster scenarios is developed. After achieving the optimal allocation of EPS spatial positions, ESS and PV rapidly perform island division to restore important-load power supply under the cooperation of EPS. This reduces the operational cost and risk cost of the distribution network.
This paper focuses on an islanding restoration method for optimal dispatch of integrated emergency mobile resources, achieving certain progress. However, the scope and depth of the research still have room for improvement. Future work will no longer be confined to deterministic assumptions. It will introduce stochastic models for load and PV output, combining robust optimization to enhance the strategy’s resistance to disturbances. Secondly, it will extend to distribution network scenarios with limited segmented switch configurations, studying the coordinated dispatch of switches and EPS. Finally, it will consider dynamic fault scenarios involving multiple disaster types, optimizing the adaptability of restoration strategies.
Data availability
The data that support the findings of this study are available from the corresponding author upon reasonable request. The dataset includes: Parameters of the improved IEEE33-node distribution network, such as load data (active and reactive power demands for each node), photovoltaic (PV) power generation data (peak values under normal operation and output prediction curves post-disaster), energy storage system (ESS) capacity and power limits, and emergency power supply (EPS) basic parameters. Simulation results from the pre-disaster/post-disaster two-stage load recovery model, including optimal EPS scheduling paths, island division modes, and load recovery efficiency metrics (e.g., load curtailment costs, important load recovery ratios). These data are stored in a secure institutional database and will be provided to researchers who demonstrate legitimate research purposes. To request access, contact the corresponding author at litingjunlyn@163.com. All requests will be reviewed and responded to within 5 business days. No third-party permissions are required for data sharing, and there are no restrictions on use other than academic integrity and compliance with research ethics guidelines.
Abbreviations
- M E :
-
Set of ESS in the system
- t :
-
Time index
- \(\Omega_b\) :
-
Set of all nodes
- S :
-
Set of all divided islands
- i, j :
-
Node indices
- \(\Omega_l\) :
-
Set of all lines
- l :
-
Line index
- I g :
-
Set of nodes directly connected by branch g
- T :
-
set of scheduling time
- N :
-
Total users
- SOC k,t :
-
State of charge of the stationary energy storage system during time interval t(kW)
- \(P_{k,t}^{ch}, P_{k,t}^{dch}\) :
-
Charging and discharging power of stationary energy storage devices(kW)
- \({T_{ij,t}}\) :
-
Total scheduling time for EPS between two nodes within a given time period(h)
- \(P_{i.t}^L, Q_{i,t}^L\) :
-
Active power and reactive power at node during time interval t(kW)
- \(P_{k,t}^{ESS}, Q_{k,t}^{ESS}\) :
-
ESS active power and reactive power during time interval t(kW)
- \(P_{k,t}^{EPS}, Q_{k,t}^{EPS}\) :
-
EPS active power and reactive power during time interval t(kW)
- \({P_{i,t}}, {Q_{i,t}}\) :
-
Active power and reactive power demand of the load during this period(kW)
- U i,t :
-
Voltage at the node during time interval t(p.u)
- I ij,t :
-
Branch current at each time interval(p.u)
- R n,t :
-
User N’s usage-based rate
- S n,t :
-
Actual usage by User N
- C sh,t :
-
Additional maintenance costs under the shared model
- \(P_{i.t}^D\) :
-
Effective Load of Load Node(kW)
- \(SOC_k^{\min ,\max }\) :
-
The minimum and maximum values of the state-of-charge of the energy storage system(kW)
- \(P_{k,t}^{ch\max }, P_{k,t}^{dch\max }\) :
-
The maximum and minimum values of the charging and discharging power of the energy storage system(kW)
- M :
-
Infinity Constant
- R ij :
-
Resistance of line (Ohm)
- X ij :
-
Reactance of line (Ohm)
- \(\sigma\) :
-
Voltage deviation, 5% in this paper
- \({c_{op}}\) :
-
EPS unit-time usage cost(CNY)
- \({c_d}\) :
-
Cost of EPS unit battery capacity degradation(CNY)
- \({\ell _t}\) :
-
Daily fixed capacity decay of EPS batteries (kW·h)
References
Qing-Le, P. B. R. P. et al. Distributed fault recovery of resilient distribution network based on load balancing [J]. Sci. Technol. Eng. 21 (24), 10317–10325 (2019). (in Chinese).
Zheng Q ,et al.Research on hierarchical response recovery method of distribution network fault based on topology analysis[J].International Journal of Critical Infrastructures,17(3), 216–236 (2021).
BIAN, Y. H. & BIE Z H. Multi-microgrids for Enhancing Power System Resilience in Response To the Increasingly Frequent Natural hazards[J]5161–66 (IFAC-Papers On-line, 2018). 28.
SHIQX. Resilience-oriented DG siting and sizing cons Ide ring stochastic scenario reduction[J]. IEEE Trans. Power Syst. 36 (4), 3715–3727 (2021).
YAOSH. Rolling optimization of mobile energy storage fleets for resilient service restoration[J]. IEEE Trans. Smart Grid. 11 (2), 1030–1043 (2020).
Yang Lijun, Z. H. A. O. et al. Fault equalization recovery of active distribution network considering emergency power vehicle scheduling [J]. Autom. Electr. Power Syst. 45 (21), 170–180 (2019).
Yao S H,Wang P, Zhaoty. Transportable energy storage for more resilient distribution systems with multiple microgrids [J]. IEEE Trans. Smart Grid 10(3), 3331–3341 (2019).
Tang Yida, W. et al. Unified model of reconfiguration and islanding for fault recovery of active distribution network [J]. Electr. Netw. Technol. 2020, 44(07):2731–2740. (in Chinese) https://doi.org/10.13335/j.1000-3673.pst.2019.1483
Li Zhenkun, Z. & Weijie, Q. Research on power supply restoration and black start strategy of active distribution network Islands [J]. Trans. China Electrotechnical Soc. 30 (21), 67–75 (2015).
WANG, Y. et al. Coordinating multiple sources for service restoration to enhance resilience of distribution systems[J]. IEEE Trans. Smart Grid. 10 (5), 5781–5793 (2019).
Jalilian, A., Taheri, B. & Molzahn, D. K. Co-Optimization of damage assessment and restoration: A Resilience-Driven dynamic crew allocation for power distribution Systems[J]. IEEE Trans. Power Syst. 40 (1), 676–688 (2025).
Wang Yushan, D. et al. Optimal configuration and operation strategy of mobile energy storage in distribution networks considering the Spatio-Temporal evolution of typhoons [J]. Autom. Electr. Power Syst. 46 (09), 42–51 (2022).
Ding, Z. et al. Resilient load restoration with distributed mobile resources: A Model-Free Approach[J]. IEEE Trans. Ind. Appl. 61 (4), 5525–5536 (2025).
Wang, L. et al. Enhancing distribution system restoration with coordination of repair Crew, electric Vehicle, and renewable Energy[J]. IEEE Trans. Smart Grid. 15 (4), 3694–3705 (2024).
Seyed, A. et al. A hierarchical scheduling framework for resilience enhancement of decentralized renewable-based microgrids considering proactive actions and mobile units[J]. Renew. Sustain. Energy Rev. 168, 112854 (2022).
Lu, Z. H. G. et al. Optimal scheduling of emergency power supply vehicle in Multi-fault emergency repair of distribution network [J]. J. Solar Energy. 41 (10), 82–92 (2019).
DING et al. Multiperiod distribution system restoration with routing repair crews, mobile electric vehicles, and soft-open-point networked microgrids[J]. IEEE Trans. Smart Grid. 11 (6), 4795–4808 (2020).
LE1S B et al. Routing and scheduling of mobile power source for distribution system resilience enhancement[J]. IEEE Trans. Smart Grid. 10 (5), 5650–5662 (2019).
Liang Haiping, S. H. I. et al. Optimization of post-disaster emergency maintenance strategy of transmission network based on improving resilience [J]. Power China. 55 (3), 142–151 (2022).
Shi, Z. et al. Capacity allocation of a photothermal power station considering decision dependent Random programming [J]. Proceedings of the CSEE,20,40(23):7511–7522.
Sun Ke, Z. H. A. N. G. et al. Two-stage robust planning of microgrid considering safety margin [J]. Electr. Netw. Technol. 44 (12), 4617–4626 (2020).
Liu Yixin, G. U. O. & Li, W. A. N. G. Chengshan.Two-stage Robust Optimal Economic Scheduling Method for Microgrid [J]. Proceedings of the CSEE,2018,38(14):4013–4022.
Chen Wei, Z. et al. Yan-Jun,. Robust island Recovery of Active Distribution Network considering electric Vehicle Configuration [J]. Proceedings of the CSEE, 38 (7): 58–67. (2018).
Daobo, Y. A. N. et al. Analysis of the 2021 Texas blackout and its implications for power grid planning and management[J]. Power Syst. Prot. Control. 49 (9), 8. https://doi.org/10.19783/j.cnki.pspc.210358 (2021).
Panteli, M. et al. Power systems resilience assessment: hardening and smart operational enhancement strategies[J].Proceedings of the IEEE, 105(7):1202–1213. (2017).
Ru, J. I. N. et al. Analysis of the influence of the upper-level environmental field on the rapid intensification of typhoon Hagupit (2020)[J]. J. Trop. Meteorol. 2024, 40(05):776–788 .https://doi.org/10.16032/j.issn.1004-4965.2024.073
Ruan, H. et al. Distributed voltage control in active distribution network considering renewable energy: A novel network partitioning method. IEEE Trans. Power Syst. 35 (6), 4220–4231 (2020).
Liu, F. et al. Utilizing aggregated distributed re-newable energy sources with control coordination for resilient distribution system restoration[J]. IEEE Trans. Sustain. Energy 14(2), 1043–1056 (2023).
Funding
This study was supported by the National Natural Science Foundation of China under the Joint Fund Program [U23A20649], Shanxi Provincial Basic Research Program [202403021212150], Open Fund Project of Key Laboratory of Ministry of Education for Clean and Intelligent Control of Coal Power [CICCE202424]; Shanxi Provincial Basic Research Program [202403021212330].
Author information
Authors and Affiliations
Contributions
Tingjun Li and Xin Chen wrote the main text of the paper. All authors reviewed the article.
Corresponding author
Ethics declarations
Competing interests
The authors declare no competing interests.
Additional information
Publisher’s note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution-NonCommercial-NoDerivatives 4.0 International License, which permits any non-commercial use, sharing, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if you modified the licensed material. You do not have permission under this licence to share adapted material derived from this article or parts of it. The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by-nc-nd/4.0/.
About this article

Cite this article
Li, T., Chen, X., Han, X. et al. Island recovery methods considering optimal scheduling of emergency mobile resources. Sci Rep 15, 36213 (2025). https://doi.org/10.1038/s41598-025-20176-6
Received:
Accepted:
Published:
Version of record:
DOI: https://doi.org/10.1038/s41598-025-20176-6
