
Abstract
This study examines the contact nonlinear behavior of multi-span girder bridges in near-fault regions through dynamic analysis, evaluating the impact of seismic parameters such as excitation amplitude, period, and apparent wave velocity on structural separation thresholds and collision responses. A contact nonlinear dynamic model, based on beam-spring-rod theory, was developed. Parametric simulations were conducted to elucidate the evolution of separation and collision energy transfer at the pier-girder interface, quantitatively assessing the separation risk index and potential collision damage zones. Results indicate that in non-uniform continuous girder bridges, the initial separation is influenced by the span ratio. When the span ratio (middle span/side span) exceeds 1, separation is more likely to initiate in the middle span. The frequency of separation and peak collision force at the middle span contact point are significantly higher than those in the side span, with spatially non-uniform seismic excitation amplifying this risk. When the excitation period approaches the structure’s fundamental vertical natural vibration period, the bearing’s axial pressure amplitude increases non-linearly. During the non-separation phase, the axial force grows linearly with increased excitation amplitude. Throughout the separation and collision phases, the rate of bearing pressure growth diminishes. The main girder’s span ratio notably impacts the contact dynamics, with a higher ratio correlating with reduced likelihood of side-span separation and decreased susceptibility of the side-span’s dynamic response to vertical seismic forces.
Similar content being viewed by others
Introduction
Traditional seismic design of bridges has historically overlooked vertical seismic forces, often simplifying them as equivalent static loads or disregarding them entirely. Initially, small-span flexible bridges could effectively absorb vertical seismic energy through structural deformation. However, with the prevalent use of prestress technology in modern long-span high-stiffness bridges, their vertical natural frequencies have become significantly linked to the high-frequency components of near-fault earthquakes. This linkage results in a 3 to 5-fold increase in vertical seismic vulnerability1,2. While the Caltrans specification indirectly addresses vertical effects by adjusting the static load coefficient3, instances of shear failure in reinforced concrete piers during the 1994 Northridge earthquake highlight the evident limitations of current specifications in near-fault regions4,5.
Recent studies have investigated the impact of vertical ground motions on bridges. Razzaghi et al.6,7,8 conducted research on the fragility curves of damage in reinforced concrete (RC) piers under near-fault vertical ground motions using fragility analysis. Sunil et al. demonstrated through shaking table tests that while the effect of vertical ground motion (VGM) on horizontal displacement ductility at the top of the pier is limited, it can increase the plastic hinge area at the pier’s bottom by over 40% and shift the failure mode from flexural to shear failure9. Additionally, the high-frequency vertical component could lead to the separation and re-impact of bearings. Shao et al.‘s experiments indicated that when the vertical-to-horizontal (V/H) ratio exceeds 1.5, the likelihood of vertical separation in laminated rubber bearings can reach 78%, with peak impact forces reaching up to 2.3 times the static load10,11.
Research on collision models has transitioned from classical mechanical approaches to precise numerical simulations. While force-based impact elements like the Hertz-damping model are commonly used in finite element (FE) software due to their compatibility, they are constrained by the point-to-point contact assumption. Guo12 introduced a point-to-surface model, and Zhu13 further advanced this with a surface-to-surface model. Bi14,15 demonstrated the efficacy of these models in simulating the torsional response of bridges, driving the progress of multi-physics coupling modeling. Yin16 proposed an exact integration method for bridge collision models, standardizing the representation of collision forces for contact elements. The incorporation of a variable step-size strategy improves computational efficiency, while the Jan-Hertz-Damp model ensures high simulation accuracy.
Longitudinal collision research focuses on studying how bridges respond to seismic forces. Jia introduced a probabilistic approach to assess the likelihood of collisions. Meng18 experiments demonstrated that while lateral collisions decrease beam displacement, they lead to increased bending moments at the pier base and higher-frequency vibrations. Yang19 numerical simulations indicated that the mass distribution of the CRTS-II track system alters the centroid eccentricity. Current studies on shear keys rely on quasi-static tests and do not account for the strain-rate impact during earthquakes. Additional experiments are necessary to validate the dynamic behavior.
In vehicle collision design, utilizing the model update method through dynamic load testing and Gaussian process regression can limit the static response prediction error to within 5%, facilitating swift safety assessment20. Steven introduced the performance-based Damage Ratio Index (DRI) to streamline the design process for circular RC piers. This index correlates the pier diameter, transverse reinforcement ratio, and vehicle kinetic energy, eliminating the need for intricate simulations21.
While advancements have been achieved in bridge collision research, the focus has predominantly been on horizontal dynamics, with vertical seismic action collision scenarios remaining inadequately addressed. Existing studies primarily utilize a simplified two-span model for analyzing vertical collision impact dynamics. For instance, Yang and Yin investigated support separation thresholds using a two-span continuous beam model22,23, An and Song conducted decoupled dynamic response analyses24,25, and Tamadon employed finite element methods to simulate vertical impact processes on curved bridges26,27. However, real-world multi-span bridges exhibit intricate boundary conditions and modal coupling characteristics. The intricate energy transfer dynamics between continuous spans can intensify spatial variations in impact force distribution.
The seismic performance of multi-span continuous girder bridges requires a focused examination of key issues. Firstly, it is essential to analyze the vertical separation interval between piers and girders systematically. Previous studies have demonstrated that in two-span girder bridges, the failure of bearing constraints due to the separation of piers and girders significantly amplifies the horizontal dynamic response of piers29. Moreover, in accordance with the current bridge seismic design code29, vertical separation leads to a notable reduction, and in some cases, near elimination of the vertical pressure supported by the piers. This reduction results in a substantial decrease in the shear strength reserve of the piers, consequently weakening their seismic capacity. Additionally, a comprehensive study on the vertical collision forces at various locations is imperative. The dynamic variation of collision forces can induce compression instability and bending-shear coupling failure of piers under horizontal loads, thereby posing a significant threat to structural safety. Therefore, it is crucial to develop a quantitative mechanical model to elucidate the evolutionary patterns of the aforementioned key parameters.
Previous research has predominantly concentrated on the vertical separation and collision of two-span girder bridges, with limited attention given to multi-span girder bridges. Given that real-world bridges are primarily of multi-span configuration and exhibit varying separation characteristics across different sections, this study aims to address this gap. A comprehensive dynamic model of the entire bridge is formulated based on boundary conditions and displacement coordination relationships. Initially, employing modal analysis under full-beam bearing contact conditions, the wave transmission characteristics are determined. Subsequently, the evolution of axial force during the beam separation phase is investigated by analyzing parameters such as excitation period, amplitude, and apparent wave velocity. By integrating the indirect modal method with contact mechanics theory, the vertical impact force is quantified, enabling an exploration of the impact of span length. It is important to highlight that this study exclusively considers vertical seismic excitation, omitting the consideration of transverse earthquake coupling effects at present.
Bridge model and its motion equation
Thi study investigates the dynamic response of bridge structures under vertical seismic excitations, emphasizing the mechanical behavior of key components such as bearings and piers, where vertical deformation primarily manifests as axial compression. Analysis of structural dynamics theory and empirical engineering data reveals that such deformation typically occurs within a limited range. Consequently, the utilization of linear elastic theory for mechanical analysis is deemed both rational and practical in this context. The theoretical modeling adopts the following fundamental assumptions:
-
(1)
The vertical stiffness of the girder is characterized using Bernoulli-Euler beam theory, while the piers are simplified as Saint-Venant rod elements, with the dynamic effects of upper moving loads neglected;
-
(2)
The vertical support system is equivalent to a spring mechanical model;
-
(3)
All bridge materials exhibit linear elastic behavior;
-
(4)
Seismic excitation is applied through a uniform displacement excitation pattern B(t).
-
(5)
The selected seismic excitation is a simple harmonic wave excitation.

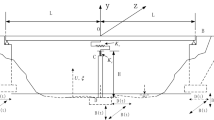
Bridge calculation model.
Here’s a scientifically enhanced version with improved technical clarity and academic rigor: Revised Version: The vertical displacement responses of the main girder and piers under seismic excitation are governed by the following governing equations:
The displacement equation of the main beam and pier under vertical excitation are as follows:
Throughout this formulation, V(l, t) represents the vertical displacement field of the main girder, while W(u, t) denotes the axial displacement field of the piers. The parameter q corresponds to the uniformly distributed dead load per unit length of the girder, with spatial coordinates defined along the girder l and piers u. The indexing scheme in Fig. 1 follows i for girder segments and j for pier elements, a convention maintained consistently in subsequent derivations. Formulas (3) and (4) are as follows:
The subscript notation convention adopts g for quasi-static deformations and d for dynamic components within the displacement decomposition framework. This separation enables distinct analysis of inertial effects (dynamic terms) and forced displacements (quasi-static terms) in the structural response.
Solution of Bridge motion equation
Contact stage
The quasi-static deformation characteristics of the main girder during the contact stage are described by:
Let F₁ and F₂ represent the support reactions at points A and B respectively. Through symmetry analysis, it can be established that parameters \(\:{V}_{g3}\) and \(\:{V}_{g4}\) exhibit a symmetrical relationship.
The piers quasi-static displacement is formulated as:
By systematically substituting Eqs. (3) and (4) into the fundamental governing Eqs. (1 and 2), we derive the dynamic deformation wave equations for the bridge structure:
The complete dynamic deformation solution is obtained through modal superposition, expressed as the summation of products between multi-order wave mode shapes and their corresponding temporal components:
The system parameters are defined as follows:
\({\psi _{nbi}}\) and \({\psi _{nrj}}\) : Spatial wave functions describing dynamic deformation of bridge components.
\({q_t}\left( t \right)\): Temporal modulation function governing dynamic response.
The characteristic wave formulations for structural elements are expressed as:
Where:
\({A_{ni}},{B_{ni}},{C_{ni}},{D_{ni}},{M_{nj}}\), \({N_{nj}}\): Complex coefficients governing wave propagation characteristics; \({k_{bn}},{k_{rn}}\): Critical wave numbers determined by \({k_{bn}}=\sqrt {{{{\omega _n}} \mathord{\left/ {\vphantom {{{\omega _n}} {{a_1}}}} \right. \kern-0pt} {{a_1}}}} ,{\text{ }}{k_{rn}}={{{\omega _n}} \mathord{\left/ {\vphantom {{{\omega _n}} {{c_1}}}} \right. \kern-0pt} {{c_1}}}\).
The essential boundary constraints for Eqs. (11, 12) are prescribed as:
Interface compatibility requirements between structural domains enforce:
Notably, the displacement-stress continuity criteria at connection nodes C and D maintain identical formulation to Eqs. (14, 15), preserving mechanical consistency throughout the structural system.
The wave function system of any structural component must satisfy fundamental orthogonality and normalization conditions. Accordingly, the characteristic functions governing the main beam and pier obey the following equation:
where eigenvalues m and n demonstrate strict spectral distinctness (\(m \ne n\)).
Through rigorous application of the modal decomposition framework: (1) Multiply the girder equation by orthogonal basis functions \({\psi _{nbi}}\) and \({\psi _{mbi}}\); (2) Multiply the pier equation by \({\psi _{nrj}}\) and \({\psi _{mrj}}\); (3) Apply integration-by-parts with subsequent linear combination. we derive the coupled modal relationship:
This yields the critical orthonormality condition:
where \({d_{mn}}\) denotes the Kronecker delta function.
The vertical natural frequency spectrum \({\omega _n}\) and corresponding wave coefficients can be uniquely determined through simultaneous solution of Eqs. (13)–(15) and (18).
The temporal evolution \({{\text{q}}_{\text{n}}}\left( {\text{t}} \right)\) of bridge deformation is governed by:
Where:
with the Laplace-domain representation:
Theoretical analysis of vertical displacement during Bridge separation phase
The bridge system exhibits distinct flexural compliance characteristics in vertical orientation, where the main girders deformability surpasses that of supporting piers. This mechanical disparity may induce upward girder displacement relative to pier supports under near-field seismic excitation. The resultant load redistribution renders pier-top supports non-load-bearing, initiating structural separation accompanied by characteristic frequency modulation.

Separation phase schematic: (a) Partial separation at point C; (b) Edge separation at points B/D; (c) Complete structural disconnection.
Three separation modalities are identified: (1) Edge span dissociation at midspan junctions (Points B/D); (2) Central span separation at midspan connection (Point C); (3) Full structural decoupling. The specific separation conditions are shown in Fig. 2.
For Case 1 separation (edge span dissociation), the governing equations for structural dynamics are:
The quasi-static deformation field during separation is characterized by:
where \({\bar {F}_1}\) and \({\bar {F}_2}\) denote bearing reactions at supports (A, E) and (B, D) respectively.
Dynamic deformation during separation follows the spatiotemporal decomposition:
The wave function system for the coupled subsystem (Part 1) comprises:
The flexural wave propagation in the main beam is governed by coefficients \({\bar {A}_{ni}},{\bar {B}_{ni}},{\bar {C}_{ni}}\;and\;{\bar {D}_{ni}}\), while axial wave transmission is characterized by coefficients \({\bar {M}_{nj}}\) and \({\bar {N}_{nj}}\). The critical wave numbers \({\bar {k}_{bn}}\) and \({\bar {k}_{rn}}\) determine the spatial propagation characteristics of these structural waves.
The boundary value problem for Part 1 is prescribed by:
The continuity conditions of internal forces and displacements in the part 1 are as follows:
Through solution of the eigenproblem defined by Eqs. (27)–(30) with orthonormalization constraints, we obtain:
The decoupled pier subsystem (Part 2) follows independent wave propagation:
The time-dependent responses of decoupled subsystems are governed by:
As established in Eqs. (32)–(33), parameter \({t_1}\) denotes the critical initiation timestamp of vertical structural separation, while \({\bar {\omega }_{n1}}\) and \({\bar {\omega }_{n2}}\) represent the fundamental vertical natural frequencies of Subsystem 1 (partially coupled) and Subsystem 2 (fully decoupled), respectively.
The computational methodology for displacement response analysis in the remaining two separation cases (midspan partial separation and complete structural decoupling) follows an analogous computational framework with appropriate modifications to: (1) Boundary condition formulations; (2) Interface continuity requirements; (3) Frequency-domain parameter matrices.
Collision stage
A vertical collision between the main beam and support occurs when the vertical relative displacement between these components reaches zero with a negative relative velocity. Similar to separation conditions, vertical collisions can be categorized into three cases. Under such circumstances, the bridges vertical displacement comprises quasi-static deformation, dynamic deformation, and collision-induced deformation. The calculation method for the first component remains identical to that in the separation phase, which will not be reiterated here. The first type of collision resulting from separation serves as the exemplar for formula derivation.
The forced vibration-induced displacement follows the same calculation methodology as the dynamic displacement during the contact phase. This section primarily derives the vertical collision displacement response of bridges. Figure 3 illustrates two collision scenarios at point C: (1) non-contact conditions at points B and D during the collision at point C, and (2) continuous contact at points B and D throughout the collision at point C.

Schematic diagram of bridge collision.
The displacement induced by vertical collision forces is calculated using Ans indirect modal superposition method16,17. The deformation formulation during the bridge collision phase, when the main girder initially impacts the mid-pier, is expressed as:
where \({\overline {{~\varphi }} _{nb}}\left( x \right)\) denotes the waveform function of the hinged-end girder (first component), \({\bar {\varphi }_{nr}}\left( \xi \right)\) represents the waveform function of the mid-pier, and the collision excitation response is obtained through convolution of the unit collision impulse response function with generalized forces. In these equations, Fnb and Fnr indicate generalized collision forces, while Fk(t) corresponds to vertical contact forces. The coordinates x0 and h0 specify collision locations between the main girder and pier, with (0,H) indicating the initial collision point. The ± signs in Eqs. (36) and (37) respectively represent directional correlations between forces and displacements. \({h_{nb}}\) and \({h_{nr}}\) denote collision impulse response functions.
Where, \({M_{nb}}=\int_{{ - 2L}}^{{2L}} {\rho {A_b}\bar {\varphi }_{{nb2}}^{2}(x)} dx,\;\;{M_{nr}}=\int_{0}^{H} {\rho {A_r}\bar {\varphi }_{{nr}}^{2}(\xi )} d\xi\) are modal masses.
During the collision phase, the compressive deformation of the support progressively increases. The vertical relative displacement at the contact point between the pier and girder is defined as \(Y\left( {0,t} \right) - U\left( {H,t} \right)={F_k}\left( t \right)/{K_c}\). The governing equation can be expressed as:
When the main girder and pier remain in contact at the mid-span joint without separation, and a secondary collision occurs at the side span joint, the main girder is computationally divided into two segments (II and III). The resulting collision-induced deformations are described by
Notably, the vertical deformation of the main girder at point D caused by collision forces is given by the superposition of deformations from both left and right segments, expressed as:
For other scenarios, the collision response calculation follows the same methodology and will not be elaborated herein.
Separation and collision characteristics of multi-span girder bridges
The actual seismic waves can be decomposed into the superposition of multiple simple harmonic waves through the fast Fourier transform. To analyze the correlation between the frequency and amplitude of seismic waves and the separation and collision characteristics of bridges, this paper uses simple harmonic waves instead of actual seismic waves for research.
This study analyzes a three-span continuous girder bridge with span arrangements of 30 m for side spans and 40 m for the central span, featuring pier heights of 15 m. Model parameters are established in accordance with the Highway Bridge Design Code29, where the equivalent mechanical parameters for piers include cross-sectional area \({\text{~}}{A_r}={A_{rc}}+\left( {{a_y} - 1} \right){A_{ry}}\), Youngs modulus \({E_r}=\left( {{E_{rc}}{A_{rc}}+{E_{ry}}{A_{ry}}} \right)/\left( {{A_{rc}}+{A_{ry}}} \right)\), and moment of inertia \({\text{~}}{I_r}={I_{rc}}+{I_{ry}}\); the girder equivalent parameters are defined as cross-sectional area \({A_b}={A_{bc}}+\left( {{a_y} - 1} \right){A_{by}}+\left( {{a_p} - 1} \right){A_{bp}}\), Youngs modulus \({\text{~}}{E_b}=\left( {{E_{bc}}{A_{bc}}+{E_{by}}{A_{by}}+{E_{bp}}{A_{bp}}} \right)/({A_{bc}}+{A_{by}}+{A_{bp}})\), and moment of inertia \({\text{~}}{I_b}={I_{bc}}+{I_{by}}+{I_{bp}}\); the bearing system employs dual-parallel elastomeric bearings with vertical stiffness \({\text{~}}{K_c}=2 \times {10^9}N/m\).
Through parametric derivation, the girder bending stiffness EbIb = 1.32 × 1011 N.m2 and cross-sectional area Ab = 6.44 m2, along with the pier bending stiffness ErIr = 9.49 × 109 N.m2 and cross-sectional area Ar = 2.86 m2, are obtained. The dynamic characteristics of the bridge were determined through eigenvalue analysis, with the first 10 vertical natural frequencies (unit: rad/s) detailed in Table 1.
Bridge separation characteristics
To address the issue of pier-girder separation induced by vertical seismic activity, it is essential to align the frequency of the seismic wave with the bridge’s primary vertical natural frequency. In this context, a period of T = 0.2 s is designated, with a vertical-to-horizontal excitation amplitude ratio (\(\:{\uplambda\:}\)) of 1. For a more detailed analysis, please consult Eq. (42) in reference28.
Where T is the vertical seismic period, α is the peak value of V/H, and β is the linear attenuation coefficient. When the epicenter distance is 3 km, 10 km and 20 km, α = 1.5, 1.4, 1.3; β = 5, 4, 3.
Figure 4 illustrates the vertical displacement response of the bridge over time, subjected to an excitation period of T = 0.2s.
\(\:{\uplambda\:}\:\) = 1. Throughout the continuous excitation period, at point B, continuous contact is maintained between the main girder and the bearing, indicating the absence of separation between the pier and the girder under typical loads. However, at point C under the same excitation conditions, a transient vertical separation occurs between the girder and the pier. This occurrence is attributed to the substantial span differential in the continuous girder bridge, where the middle span (40 m) exceeds the side span (30 m) by 26.7%. This discrepancy amplifies the dynamic deformation response at the mid-span by 1.8 times when subjected to vertical excitation, consequently inducing nonlinear separation behavior due to contact.

Vertical dynamic response of the bridge under T = 0.2 s excitation: (a) Point B; (b) Point C.
Figure 5 illustrates the quantitative relationship between the minimum bearing axial force and the excitation period (T), accounting for changes in the ratio of vertical excitation amplitude to horizontal excitation amplitude. The specific values of λ and T are detailed in references28,29.
Data analysis reveals that bearings at Point B exhibit axial force nullification (critical unseating state) within the range of T = 0.22s~0.26s, while the zero-axial-force interval extends to T = 0.2s~0.33s at Point C. Notably, Point C demonstrates secondary trough fluctuations with amplitudes of approximately 0.73Fc near T2 = 0.14s (approaching the system’s second-order vertical natural period).

Minimum bearing axial forces under varying excitation periods.
Figure 6 elucidates the evolution of minimum bearing axial pressure under coupled excitation periods (T) and amplitudes (g). Defining the axial pressure nullification threshold as the contact surface separation limit, comparative analysis shows: bearings at Point B experience transient unseating only near \(T \approx {T_1}\) (system’s first-order vertical natural period), while Point C exhibits dual-peak unseating behavior—persistent separation occurs under both mid-period \(T \approx {T_1}\) and long-period excitations.

Minimum bearing pressures under different excitations: (a) Point B; (b) Point C.
(This figure was plotted using Origin, version 2021)
In addition to excitation frequency and amplitude parameters, the spatial non-uniformity of ground motions significantly influences bridge dynamic responses. As shown in Fig. 7, a comparative analysis of structural response characteristics was conducted for the working condition with T = 0.2s and V/H = 1 under two wavefield propagation conditions (apparent wave velocities: 500 m/s and 1000 m/s). Regarding dynamic response characteristics at Point B (Fig. 7a and c), numerical simulations reveal that vertical separation between the main girder and bearing system occurs at t = 0.108s under 500 m/s apparent wave velocity, while this separation delays to t = 0.495s when the wave velocity increases to 1000 m/s. This finding markedly differs from traditional uniform excitation analyses, where no structural vertical separation was observed under identical inputs.
For dynamic response at Point C (Fig. 7b and d), results demonstrate the apparent wave velocity’s significant regulatory effect: structural systems exhibit differentiated vertical separation timing characteristics—separation initiates at t = 0.132s (500 m/s) and delays to t = 0.518s (1000 m/s). This phenomenon underscores the critical role of wavefield propagation effects in governing time-varying structural dynamic interactions.

Vertical bridge responses under different apparent wave velocities: (a) v = 500 m/s (Point B); (b) v = 500 m/s (Point C); (c) v = 1000 m/s (Point B); (d) v = 1000 m/s (Point C).
Figure 8 presents the evolution of the extreme values of the bearing contact force under various apparent wave velocities. Herein, (a) and (b) respectively depict the distribution of the minimum contact force at key nodes B and C under the working condition of v = 500 m/s. (c) and (d) respectively represent the distribution of the minimum contact force at key nodes B and C under the working condition of v = 1000 m/s.
Numerical findings demonstrate that the introduction of the apparent wave velocity parameter (v) results in the pier-bridge system’s extreme contact force displaying significant non-monotonic behaviors, as illustrated in Fig. 8. This behavior arises from the propagation effect of the wave field: the consideration of the apparent wave velocity causes an expansion in the phase difference of the local structure vibration, thereby inducing fluctuations in the extreme value of the contact force between the main girder and the pier. In contrast, the conventional assumption of uniform excitation overlooks the time delay in seismic wave propagation and the loss of coherence, leading to a monotonic contact force distribution with variations in the excitation amplitude ratio.

Minimum bearing axial forces under different excitation conditions: (a) Point B; (b) Point C (This figure was plotted using Origin, version 2021).
Structural collision response study
Based on comparative analyses of different excitation periods (Fig. 9), this study investigates vertical dynamic responses under two typical conditions: T = 0.2 s (spatially non-uniform seismic excitation with v = 500 m/s) and T = 0.25 s (uniform excitation). Numerical simulations reveal: (1) Under T = 0.2 s non-uniform excitation (Fig. 10a and b), Monitoring Point B experiences 4 vertical separation events, with maximum axial force reaching 26.58 MN (2.36 times static contact force). Monitoring Point C exhibits 10 separation events and maximum contact force of 33.42 MN (2.46 times static value); (2) At T = 0.25 s (Fig. 10c and d), Point B shows 11 separation events and maximum axial force of 30.24 MN (2.69 times static value), while Point C maintains 10 separation events with maximum force increasing to 37.42 MN (2.76 times static value).
Comparative analysis identifies critical patterns: When the excitation period (T = 0.25 s) approaches the structural vertical natural period, the system exhibits pronounced dynamic amplification: (1) Separation frequency increases by 175% at Point B, indicating reduced dynamic stability; (2) Maximum collision forces rise by 13.8% (Point B) and 11.9% (Point C), validating energy accumulation due to resonance. This aligns with the “excitation period–natural period coupling effect” in contact dynamics theory, where phase synchronization near natural frequencies amplifies dynamic contact forces and interaction frequency.

Vertical bridge responses under different apparent wave velocities: (a) T = 0.2 s (Point B); (b) T = 0.2 s (Point C); (c) T = 0.25 s (Point B); (d) T = 0.25 s (Point C).
Figure 10 shows the mechanisms of peak axial pressure under coupled seismic parameters. Numerical results demonstrate that as T approaches the bridge’s first-order vertical natural period, maximum bearing axial pressure follows exponential growth with seismic amplitude, elevating structural damage risks. Notably: (1) During non-separation phases, peak axial pressure shows linear proportionality to excitation amplitude (Fig. 10a); (2) Post-separation, collision force sensitivity to amplitude decreases markedly, with growth rates reduced to 32–45% of non-separation phases (Fig. 10b), attributed to energy dissipation shifts caused by contact interface nonlinearity.

Maximum bearing pressures under different excitations: (a) Point B; (b) Point C.
(This figure was plotted using Origin, version 2021)
Study on the influence of girder span on structural collision
Variations in the span ratio (central span/side span) of multi-span girder bridges not only significantly affect the separation characteristics of adjacent components but also induce dynamic adjustments in collision forces. This study systematically analyzes span ratios ranging from 1.0 to 1.5, achieved by adjusting side spans while maintaining a constant central span. Table 2 quantifies the evolution of the bridge’s first-order vertical natural frequency under different span ratios.
Figure 11 systematically reveals the evolution of axial pressure at control sections B and C with excitation periods under varying span ratios. Both Points B and C exhibit significant dynamic amplification effects when excitation periods approach the structural first-order natural frequency. Parametric sensitivity analysis indicates a weak correlation between span ratio and mid-span dynamic responses, specifically manifested as limited variations in separation intervals and maximum collision forces. In stark contrast, side-span dynamic responses exhibit strong span ratio dependency: as the span ratio increases, the vertical displacement amplitude at Point B shows marked attenuation, and the system progressively stabilizes into a non-separation state under higher span ratios.
According to structural mechanics theory, the separation phenomenon can cause support constraints to fail, leading to a significant increase in the horizontal dynamic response of piers. Additionally, a decrease in pier pressure can notably reduce the allowable shear capacity, consequently elevating the risk of shear failure29. Furthermore, accurately assessing the vertical collision force is crucial for understanding the bending moment - axial force coupling effect on piers. The dynamic characteristics of this force can worsen the bending and compression conditions of the structure, thereby elevating the likelihood of failure. Research findings indicate that: (1) The support pressure at the connection between the main girder and the middle pier is higher compared to the side girders, making this area more susceptible to compression and bending failures; (2) Increasing the ratio of the middle span to the side span can effectively mitigate the separation phenomenon in the bridge, thereby reducing the chances of bending and shear failures.

Support pressure: (a) minimum, point B; (b) minimum, point C; (c) maximum, point B; (d) maximum, point C; (This figure was plotted using Origin, version 2021)
Conclusion
This study investigates the contact nonlinear behavior of multi-span girder bridges in nearThis study investigates the contact nonlinear behavior of multi-span girder bridges in near-fault regions through dynamic analysis, systematically evaluating the influence mechanisms of seismic parameters (excitation amplitude, excitation period, and apparent wave propagation velocity) on structural separation thresholds and collision responses. A full-bridge contact nonlinear dynamic model was established based on the beam-spring-rod theory, and parametric numerical simulations were conducted to reveal the separation evolution patterns and collision energy transfer characteristics at pier-girder interfaces, with quantitative characterization of separation risk indicators and potential collision damage zones. The main findings are as follows:
-
(1)
Span-dependent initial separation behavior: For non-uniform continuous girder bridges, the initial separation location exhibits span ratio dependence. When the span ratio (central span/side span) exceeds 1, contact separation preferentially occurs in the central span. Both separation frequency and collision force peaks at central-span contact points significantly surpass those at side spans, with spatially non-uniform seismic excitation further amplifying separation risks.
-
(2)
Dynamic resonance characteristics: The collision response demonstrates notable dynamic resonance features. When the excitation period approaches the structures fundamental vertical natural period, the axial compressive force amplitude at supports shows nonlinear amplification effects. While excitation amplitude increases induce linear axial force growth during non-separation phases, the post-separation phase exhibits significantly reduced axial force growth rates due to energy dissipation mechanisms at contact interfaces.
-
(3)
Span ratio regulation effects: The span ratio exerts regulatory control on contact behavior. As the span ratio increases, the separation probability at side spans progressively decreases, accompanied by gradual attenuation of the influence coefficient of vertical seismic excitation on side-span dynamic responses, demonstrating span decoupling effects.
Data availability
For the data of the paper, if you need to obtain the data, please apply to the corresponding author. For the specific research methods, detailed formula derivations have been provided in the manuscript, including key variables and analysis methods, to ensure transparency.
References
Kim, S. J., Holub, C. J. & Elnashai, A. S. Analytical assessment of the effect of vertical earthquake motion on RC Bridge piers. J. Struct. Eng. 137 (2), 252–260 (2011).
Rodrigues, H., Furtado, A. & Arede, A. Behavior of rectangular reinforced-concrete columns under biaxial Cyclic loading and variable axial loads. J. Struct. Eng. 142 (1), 1–8 (2016).
Silva, W. Characteristics of vertical strong ground motions for applications to engineering design. In FHWA/NCEER Workshop on the Nat’l Representation of Seismic Ground Motion for New and Existing Highway Facilities, (Technical Report NCEER- 97 – 0010); California Department of Transportation. Caltrans Seism Des Criteria 1.6:161 (1997).
Button, M. R., Cronin, C. J. & Mayes, R. L. Effect of vertical motions on seismic response of highway bridges. J. Struct. Eng. 128, 1551–1564 (2002).
Wei, B., Zuo, C., He, X., Jianga, L. & Wang, T. Effects of vertical ground motions on seismic vulnerabilities of a continuous track-bridge system of high-speed railway. Soil. Dyn. Earthq. Eng. 115 (2018), 281–290 (2018).
Razzaghi, M. S., Safarkhanlou, M., Mosleh, A. & Hosseini, P. Fragility assessment of RC bridges using numerical analysis and artificial neural networks . Earthquakes Struct. 15 (4), 431–441 (2018).
Hosseini, A. R. M., Razzaghi, M. S. & Shamskia, N. Probabilistic seismic safety assessment of bridges with random pier scouring. Proc. Inst. Civ. Eng.-Struct. Build. 177 (9), 838–855 (2023).
Collura, D. & Nascimbene, R. Comparative assessment of variable loads and seismic actions on bridges: a case study in Italy using a multimodal approach. Appl. Sci. 13 (5), 2771 (2023).
Sunil, T., Yadin, S. & Dipendra, G. Seismic fragility analysis of RC bridges in high seismic regions under horizontal and simultaneous horizontal and vertical excitations. Structures 37 (3), 284–294 (2022).
Shao, Y. H. et al. Empirical models of Bridge seismic fragility surface considering the vertical effect of near-fault ground motions. Structures 34, 2962–2973 (2021).
Fukushima, Y. et al. Characteristics of observed peak amplitude for strong ground motion from the 1995 Hyogoken Nanbu (Kobe) earthquake. Bull. Seismol. Soc. Am. 90 (3), 545–565 (2000).
Guo, A., Li, Z. & Li, H. Point-to-surface pounding of highway bridges with deck rotation subjected to bi-directional earthquake excitations . J. Earthquake Eng. 15 (2), 274–302 (2011).
Zhu, P., Abe, M. & Fujino, Y. Modelling three-dimensional non-linear seismic performance of elevated bridges with emphasis on pounding of girders. Earthq. Eng. Struct. Dyn.. 31 (11), 1891–1913 (2002).
Bi, K. & Hao, H. Numerical simulation of pounding damage to Bridge structures under spatially varying ground motions. Eng. Struct. 46, 62–76 (2013).
Bi, K. & Hao, H. Modelling of shear keys in Bridge structures under seismic loads. Soil Dyn. Earthq. Eng. 74, 56–68 (2015).
Junhong Yin, M. et al. Precise integration of Bridge structure collision models under seismic effect. Alexandria Eng. J. 61, 2146–2154 (2022).
Jia, H. Y., Lan, X. L., Zheng, S. X., Li, L. P. & Liu, C. Q. Assessment on required separation length between adjacent Bridge segments to avoid pounding. Soil Dyn. Earthq. Eng. 120, 398–407 (2019).
Meng, D., Liu, Q., Yang, M. & Yang, Z. Seismic vulnerability of simply-supported bridges considering link-slabs in the continuous deck and pounding. Struct. Infrastruct. Eng. 2022, 1–19 (2022).
Yang, M., Meng, D., Wei, K. & Qiao, J. Transverse seismic pounding effect and pounding reduction of simply-supported girder Bridge for high-speed railway. J. Southwest. Jiaotong Univ. 55 (1), 100–108 (2020).
Moayyedi, S. A. et al. Effects of Deck-Abutment pounding on the seismic fragility curves of Box-Girder highway bridges . J. Earthquake Eng. 28 (8), 2188–2217 (2024).
[21] JankowskiSteven, A., Alice, A. & Dikshant, S Performance-based design of Bridge piers under vehicle collision. Eng. Struct. 191, 752–765 (2019).
Yang, H. & Yin, X. Theoretical investigation of Bridge seismic responses with pounding under near-fault vertical ground motions. Adv. Struct. Eng. 11 (4), 452–468 (2015).
Yang, H. & Yin, X. Transient responses of girder bridges with vertical poundings under near-fault vertical earthquake. Earthq. Eng. Struct. Dyn. 44, 2637–2657 (2015).
An Wenjun, S. & Guquan, K. Transient response of Bridge piers to structure separation under near-fault vertical earthquake. Appl. Sci. 11 (9), 4068 (2021).
An Wenjun, S. & Guquan, C. Near-fault seismic response analysis of bridges considering girder impact and pier size. Mathematics 9 (7), 704 (2021).
Tamaddon, S., Hosseini, M. & Vasseghi, A. The effect of curvature angle of curved RC box-girder continuous bridges on their transient response and vertical pounding subjected to near-source earthquakes. Structures 28, 1019–1034 (2020).
Tamaddon, S., Hosseini, M. & Vasseghi, A. Effect of non-uniform vertical excitations on vertical pounding phenomenon in continuous-deck curved box girder RC bridges subjected to near-source earthquakes. J. Earthq. Eng. (2021).
Bozorgnia, Y. & Campbell, K. W. The vertical-to-horizontal response spectral ratio and tentative procedures for developing simplified V/H and vertical design spectra. J. Earthq. Eng. 8 (2), 175–207 (2004).
CJJ 166–2011. Code for Seismic Design of Urban Bridges. Ministry of Housing and Urban-Rural Development of the People’s Republic of China (2025).
Author information
Authors and Affiliations
Contributions
Xuerong Liu conceptualized the study, designed the experiments, and supervised the overall research process. Leilei Li was responsible for data collection, conducting the experiments, and performing the initial data analysis. Yang Liu contributed to the interpretation of the results, assisted in the writing of the manuscript, and reviewed and edited the final draft. Shuigen Chen participated in the experimental design, provided technical support during the experiments, and helped with the data validation. Wenjun An was involved in the literature review, contributed to the discussion section of the manuscript, and revised the manuscript for important intellectual content. All authors have read and approved the final manuscript and agree to be accountable for all aspects of the work.
Corresponding author
Ethics declarations
Competing interests
The authors declare no competing interests.
Additional information
Publisher’s note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution-NonCommercial-NoDerivatives 4.0 International License, which permits any non-commercial use, sharing, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if you modified the licensed material. You do not have permission under this licence to share adapted material derived from this article or parts of it. The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by-nc-nd/4.0/.
About this article

Cite this article
Liu, X., Li, L., Liu, Y. et al. Study on the influence of near-fault vertical ground motion on the dynamic response of separation and collision of bridge. Sci Rep 15, 36372 (2025). https://doi.org/10.1038/s41598-025-20347-5
Received:
Accepted:
Published:
Version of record:
DOI: https://doi.org/10.1038/s41598-025-20347-5
