
Abstract
The Surface Water and Ocean Topography (SWOT) satellite, employs wide-swath interferometric altimetry to measure sea surface height (SSH) with high spatial resolution. This study proposes an optimized method for computing geoid gradients (GGs) tailored to the high-resolution SWOT data, which calculates GGs using pairs of SSH observations separated by a defined distance interval. The performance of KaRIn data from the science phase is evaluated for marine gravity anomaly (GA) inversion. Based on KaRIn data from SWOT cycles 1–18 (July 2023–July 2024), the Gulf of Mexico GA model (SWOT_GRA) is developed and compared with models derived from SARAL (2016–2023) and Cryosat-2 (2010–2023) data. Results indicate that the optimized GGs computation method enhances GA accuracy, while combining along-track and cross-track GGs reduces meridian-prime disparities. The SWOT_GRA model achieves an accuracy of approximately 3.18 mGal when compared to shipborne gravity data, representing an 8.5% improvement over the Cryosat-2 and SARAL models. These findings demonstrate that GA inversion using one year of SWOT data surpasses the accuracy of results obtained from 13 years of traditional altimetry data, highlighting the potential of SWOT wide-swath data to advance the construction of a unified, high-precision marine gravity field.
Similar content being viewed by others

Introduction
Satellite altimetry technology enables the acquisition of global sea surface height (SSH) information1, allowing comprehensive monitoring of oceanic variations and providing unprecedented opportunities for studying ocean surfaces2,3,4,5, seafloor structures6,7, and marine gravity fields8,9,10. Altimetry data contain abundant oceanographic information and have become an important means for obtaining marine gravity field information11.
Traditional altimetry satellites, however, are limited to measuring one-dimensional SSH along the ground track. While they provide precise resolution along the track, they leave significant data voids in the cross-track direction12. This uneven resolution along and cross the track restricts the spatial resolution and coherence of marine gravity and seafloor topography8,13.On December 16, 2022, the SWOT satellite was launched from California aboard a SpaceX Falcon 9 rocket and successfully entered its designated orbit. The satellite completed its rapid sampling phase, which focused on calibration and validation, from March 29 to July 9, 2023. Following this phase, SWOT will adjust its orbit to enter the scientific phase, during which it will conduct Earth observations for the next three years. With an orbital altitude of 890 km and an inclination of 77.6°, SWOT will sample a 120 km swath beneath its ground track on a 21-day repeat orbit14. The Ka-band radar interferometer (KaRIn) aboard SWOT is capable of acquiring two-dimensional observations within a 50 km wide swath on both sides of the nadir point, providing high-precision and high-resolution observational data for hydrology, oceanography, and geophysical research15,16,17.
At present, numerous studies have utilized SWOT data to investigate the recovery of the marine gravity field18,19,20. Beta pre-validation data were used to compute the GA and seafloor topography, highlighting the substantial potential of KaRIn and SWOT in supporting oceanographic research21. The recovery of high-frequency marine gravity signals using SWOT Level-2 KaRIn Beta data has been examined22. A novel method for determining components of deflection of the vertical (DOV) was proposed and applied to both simulated and real SWOT datasets23.
This study proposes an optimized method for computing geoid gradients (GGs) that takes full advantage of the high spatial resolution of SWOT data by appropriately adjusting the distance between pairs of SSH observation points. Using this approach, Level-2 KaRIn data from the SWOT science phase are utilized to invert deflections of the vertical (DOVs) and marine GAs in the Gulf of Mexico. The objective is to evaluate the benefits of SWOT’s wide-swath altimetry compared to conventional altimetry in recovering the marine gravity field. Section “Study region and data” introduces the study area and datasets. Section “Research methods” outlines the methodology used to derive DOV and GAs. Section “Results and analysis” presents the construction of DOV and GA models based on SWOT KaRIn, SARAL, and CryoSat-2 data, followed by a comparative accuracy assessment using multiple reference datasets. The conclusions are summarized in Sect. “Conclusion”.
Study region and data
Study region
The study region encompasses the Gulf of Mexico and the northern part of the Caribbean Sea, covering geographical coordinates between 82°–100°W and 17°–32°N. This area contains various islands, including the Florida Keys, the Cayman Islands, and Young Island. It is also distinguished by notable underwater topographies, such as the Mexican Basin, Cayman Ridge and Cayman Trench. The Cayman Trench, in particular, reaches depths of up to 6,000 meters24. The area is rich in oil and natural gas reserves, making the precise determination of GAs essential for studying fault zones and geological changes associated with oil and gas exploration in the region25. The study region is shown in Fig. 1.

The study area and the distribution of NCEI shipborne data within the study area. (GMT v6.5.0, https://gmt-china.org/).
SWOT L2_LR_SSH data
The SWOT data utilized are provided by AVISO and consist of the KaRIN altimeter product L2_LR_SSH_Expert26. The dataset includes measurements from both the 1-day calibration phase and the 21-day scientific phase26. As shown in Fig. 3, the KaRIN data comprise two 50 km-wide strips, separated by a 20 km gap at their lowest points. Data from both sides are resampled onto a regular grid at the resolution of 2 km × 2 km, ensuring consistency across each cycle27. This consistency facilitates the processing of multi-cycle KaRIN observations. For this study, KaRIN data from the L2_LR_SSH_Expert product during the 21-day scientific phase (covering cycles 1 to 18, from July 2023 to July 2024) are used.
The sea surface height anomaly (SSHA) variable (ssha_karin) from the L2_LR_SSH_Expert is calculated by subtracting the mean sea surface (MSS), tidal corrections (including those for solid Earth, oceanic, loading, coherent internal tides, and polar tides), and dynamic atmospheric corrections from ssh_karin. When using SSH data to calculate marine GAs, it is crucial to apply these tidal and atmospheric corrections. The L2_LR_SSH_Expert product also provides an important height correction, called the cross-calibrated height correction (height_cor_xover). This correction is calculated by the cross-combination of ascending and descending track SSH measurements on different channels within a specific time window, estimating the residual error that was not removed during processing, without the use of auxiliary attitude and calibration data26. The SSH data used in this experiment is calculated using SSHA from the product, the MSS (mean_sea_surface_cnescls) and height_cor_xover, as follows:
where mean_sea_surface_cnescls represents the MSS height above the WGS84 reference ellipsoid, as provided in the L2_LR_SSH_Expert product. The MSS values are derived from the MSS_CNES_CLS2022 model28. The SSH corrected as shown in (1) will be used for experiments and analysis.
Cryosat-2 and SARAL data
CryoSat-2, a satellite designed by the European Space Agency (ESA) for polar observations, operates at an average altitude of 717.2 km with an orbital inclination of 92° and a revisit cycle of 369 days. Launched in 2010, the satellite has three observation modes optimized for measuring different surfaces29. The CryoSat-2 altimetry data used in this study are sourced from AVISO, specifically the L2P Version 3.0 LRM data, covering the period from July 2010 to October 2023.
The SARAL satellite is an altimeter satellite that was jointly launched by the Indian Space Research Organization (ISRO) and CNES. It is equipped with the AltiKa (Ka-band altimeter) and is the first satellite to use the Ka band, which improves both the operating frequency and ranging accuracy, thereby providing higher precision altimeter data30. The SARAL altimetry data utilized are sourced from AVISO, the L2P Version 3.0 data for the SARAL/DP phase, covering the period from July 2016 to October 2023.
Mean dynamic topography (MDT)
The MDT-CNES-CLS18 model, developed by CNES, is a global grid-based model with a 0.125° resolution. The MDT represents the difference between the MSS and the geoid. Compared to previous versions, the new model shows significant improvements in regions with strong currents and along the coast31.
Earth gravitational field model
This study uses the remove-restore method to calculate GAs, utilizing the XGM2019e_2159 reference gravity model32, which is from the XGM2019e model complete to degree and order 2159. The XGM2019e model is derived through the combination of multiple datasets, including the GOCO06s gravity field model, terrestrial gravity data provided by the NGA, and gravity anomaly data obtained from satellite altimetry over the oceans and topography over land. The reference geoid and gravity models on regular grids can be computed from the model’s spherical harmonic coefficients via the International Centre for Global Earth Models (ICGEM, https://icgem.gfz-potsdam.de/calcgrid).
Evaluation data
To access the precision of the altimetry-derived inversion model, this study employs the version 32.1 marine DOV and GA model, released by the Scripps Institution of Oceanography (SIO) in 2022, with a grid resolution of 1′ × 1′33. Compared to earlier versions, the model incorporates waveform retracking for altimeter data from Jason-1/2, Envisat, Altika, and Cryosat-LRM, and includes an additional 12 months of altimeter data.
The SDUST2022 GA model34 is a marine gravity field model developed by Shandong University of Science and Technology (SDUST), featuring a resolution of 1′×1′ and a global accuracy of up to 2 mGal.
Shipborne gravity data
Shipborne gravity data are commonly used to assess the accuracy of GA models derived from altimetric data35. Shipborne data for assessing gravity accuracy were sourced from NCEI. A total of 28 ship tracks spanning from 1961 to 1985 were used in the analysis. The distribution of these tracks is shown in Fig. 1. These data were collected by different organizations using various instruments over different time periods, leading to the introduction of several long-wavelength errors. The errors primarily arise from factors such as gravimeter drift, reference field discrepancies, and leveling biases36. To mitigate errors arising from ellipsoid model uncertainties and gravimeter drift, a quadratic polynomial correction was applied as follows:
where \(\Delta g\) represents the corrected shipborne GA. \(x_{0} ,x_{1} ,x_{2}\) is the fitting parameter, which is solved using the least squares method. \(\Delta t\) is the time interval between the observation time and the departure time37.
Gross errors were then removed based on the 3σ principle, the GAs from the XGM2019e_2159 are interpolated to the shipborne gravity points, and the difference between the interpolated and measured GAs is calculated. The standard deviation (STD) of the difference is then determined, and shipborne gravity points with differences exceeding three times the STD are removed. Table 1 presents the comparison results of the differences between the shipborne GAs and the XGM2019e_2159 model after adjustment and outlier rejection.
As shown in Table 1, after correcting the shipborne gravity dataset, a total of 11,171 shipborne gravity points were removed, resulting in an exclusion rate of 4.76%. The RMS between the shipborne data and the XGM2019e_2159 model before correction was 6.25 mGal, and after correction, it improved to 3.64 mGal, showing a significant improvement in accuracy.
Research methods
Unlike conventional altimetric satellites that provide only along-track measurements, the SWOT satellite enables wide-swath observations, allowing for two-dimensional SSH measurements. This study utilizes the high spatial resolution of SWOT KaRIn data from the science phase to invert marine GAs over the Gulf of Mexico, as illustrated in Fig. 2. Initially, the SSHA and relevant corrections are extracted from the SWOT product to obtain corrected SSH. The MDT is then removed to derive the geoid height. Geoid gradients (GGs) are computed along both the along-track and cross-track directions at varying spatial intervals, and reference gradients are removed to obtain residual GGs. The remove-restore technique is then employed to estimate gridded residual DOV using the least-squares collocation (LSC) method. These residual DOVs are converted into residual GAs using the inverse Vening–Meinesz (IVM) formula. Finally, the reference GAs from the XGM2019e_2159 model are restored to yield the final marine GA model.

Flowchart of the construction of Gulf of Mexico Gravity Anomaly Model using SWOT science phase altimetry data.
Geoid gradient Along-Track and Cross-Track
The geoid height is derived by eliminating the MDT effect from the preprocessed SSH, as follows:
where N denotes the geoid height; \(MDT\)represents mean dynamic topography, which is provided in the L2_LR_SSH_Expert product and derived from the MDT-CNES-CLS18 model.
Unlike traditional altimetry satellites, SWOT captures two-dimensional grid data, as shown in Fig. 3. To fully utilize SWOT’s wide-swath altimetry capability, the two-dimensional observations are decomposed into one-dimensional data in both along and cross track. The GGs in the along-track and cross-track directions can be determined by:
where \({N_Q}\) and \({N_P}\) represent the geoid heights at observation points Q and P, respectively, while S denotes the spherical distance between points Q and P.
The remove-restore technique is essential in gravity recovery, particularly in the inversion of marine GAs using altimetric data. It helps eliminate long-wavelength errors, improving the accuracy of the results. The residual GG is obtained by subtracting the GG from the XGM2019e_2159 model from the observed GG as follows,
where \({e_{ref}}\) represents the GG calculated from the XGM2019e_2159 reference field, while \({e_{res}}\) denotes the residual GG.

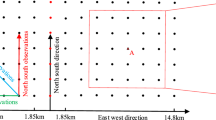
Schematic diagram of the SWOT L2_LR_SSH wide-swath altimetry data points. The spatial resolution of observation points on the observation swath is 2 km×2 km. The two-dimensional observations along the swath can be decomposed into one-dimensional observations in the along-track and cross-track directions.
Calculation of geoid gradient at different distance intervals
When calculating GGs using traditional altimetry satellite data, it is common to use two adjacent SSH observations along the satellite ground track38. The SSH data obtained from SWOT is gridded with a resolution of 2 × 2 km. When using Eq. (4) to calculate the GG, the small differences in SSH between two adjacent observation points, coupled with their close spherical distance, can impact the calculation accuracy of the GG.
To improve the accuracy of GG calculations, this study utilizes integer multiples of 2 km as distance intervals based on the spatial sampling characteristics of SWOT data, and computes GG using two observation points constrained by these intervals along the satellite track. When computing the GG at observation point \({P_i}\) in the along-track or cross-track direction, a distance interval \({\text{d}}\) is first defined, and then the observation point \({Q_i}\) at a distance \({\text{d}}\) from \({P_i}\) is selected. The GG is then computed using the SSH values at \({P_i}\) and \({Q_i}\). For the next observation point \({P_{i+1}}\), the same procedure is followed by selecting a point \({Q_{i+1}}\) at distance \({\text{d}}\), and the above calculation process is repeated. By appropriately increasing the distance between the observation points used in the computation, long-wavelength errors associated with distance can be effectively reduced, thus improving the accuracy of GG calculation. Since the spacing between adjacent observation points in the SWOT data is 2 km, the geoid gradient (GG) interval is also 2 km, meaning the GG sampling interval matches the spatial resolution of the SSH data.
Accuracy of geoid gradient
When calculating the residual DOVs using the LSC method, evaluating the accuracy of the SSH data is crucial, as it directly influences the precision of the GG. Discrepancies in SSH at crossover points can indicate the consistency of satellite altimetry data and serve as a common method for evaluating the precision of SSH measurements38. The accuracy of SWOT SSH can be determined by examining the SSH at the crossover points between the ascending and descending orbits. This study leverages the characteristic of SWOT data, where observation points are spaced approximately 2 km apart, to construct a 1′×1′ grid for identifying the crossover points and calculating the discrepancy at these points. If data from both the ascending and descending orbits are present in a grid, the grid is considered to have a crossing point, and the midpoint coordinates of the grid are used as the location of the crossing point. In some cases, there may be no direct observation points at the crossover locations. Therefore, a bilinear interpolation method is employed to estimate the SSH at the crossover points, and the discrepancy in SSH at the crossover points is subsequently calculated as follows:
where \(ss{h_a}\) and \(ss{h_d}\) represent the SSH at the crossover point for the ascending and descending orbits, respectively. To assess the accuracy of SSH, all crossover discrepancies are statistically analyzed, and the root mean square (RMS) of the crossover differences is computed as follows:
where \({m_\Delta }\) denotes the root mean square of the crossover differences, and n represents the number of crossover points.
If the influence of sea surface temporal variations is neglected, the SSHs from the ascending and descending orbits at crossover points can be assumed to be independent and of equal precision39. The root mean square of SSH observations can be calculated by:
where \({m_{ssh}}\) represents the RMS of the SSH.
According to the error propagation law, when the distance error between the two points is neglected, the root mean square of the GG at the observation points P and Q can be expressed as follows:
where \({m_{{e_{PQ}}}}\) represents the RMS of the GG, and S is the spherical distance between observation points P and Q.
Least-squares collocation
Based on the residual GG, the LSC method is used to determine the gridded residual DOVs36. The residual DOVs components are determined as follows:
where \({\xi _{res}}\) and \({\eta _{res}}\) represent the meridian and prime components of the residual DOVs, respectively; \({C_{\xi e}}\) is the covariance matrix of \(\xi\) and the GG; \({C_{\eta e}}\) is the covariance matrix of \(\eta\) and the GG; \({C_{ee}}\)denotes the variance-covariance matrix of the GG; \({C_n}\) denotes the noise variance of the GG, calculated using Eq. (9); and \({e_{res}}\) is the vector composed of the GG.
A key aspect of applying LSC is the construction of the covariance matrix between signals. At a given spherical distance, the covariance function of the residual disturbing potential can be calculated using Model 4 developed by Tscherning and Rapp40. The variance functions for the meridian and prime components of DOV are directionally dependent. In contrast, the variance functions of the radial component l and tangential component m of DOV are isotropic. Therefore, the covariance of the radial and tangential components can be derived from the covariance function1,38. Consequently, \({C_{\xi e}}\), \({C_{\eta e}}\) and \({C_{ee}}\)can be determined as follows:
where \({C_{ll}}\) and \({C_{mm}}\) represent the covariances of the radial and transverse components of DOV, respectively. \({\alpha _{eQ}}\) and \({\alpha _{eP}}\) are the azimuths at points Q and P, respectively. \({\alpha _{QP}}\) and \({\alpha _{PQ}}\) indicate the azimuth directions from Q to P and from P to Q, respectively.
When using the LSC method, it is essential to determine the size of the computation window. The window size directly influences the accuracy of DOVs calculations, as it alters the amount and distribution of GG data. Increasing the window size generally improves accuracy; however, this comes at the cost of slower computation speed and exponentially higher time consumption. To strike a balance between accuracy and computational efficiency, this study selects a computation window of 6′ × 6′41.
Inverse Vening-Meinesz formula
The calculated residual gridded DOVs components are used as input data, and the IVM42 is applied to determine residual GAs as follows:
where \({\gamma _0}=\frac{{GM}}{{{R^2}}}\); \({\alpha _{qp}}\) is the azimuth angle between point q and point p; \({\xi _q}\)and \({\eta _q}\)are the meridian and prime components of the residual DOVs at point q, respectively; and \(H^{\prime}\left( \psi \right)\) denotes the derivative of the kernel function, which is calculated as follows:
where \(\psi\) represents the spherical distance between points p and q.
When calculating the GA at grid points using the IVM, the influence of the inner zone belt must be taken into account. If the distance between the two points is equal to 0, the kernel function \(H^{\prime}\left( \psi \right)\) becomes singular. The GA of the inner zone belt can be calculated as follows:
where \({\xi _x}\)represents the rate of change of the \(\xi\) in the north direction, \({\eta _y}\) represents the rate of change of the \(\eta\) in the east direction. \({s_0}\) is the radius of the innermost zone, which can be expressed as follows:
where \(\Delta x\) and \(\Delta y\) represent the grid spacing in the meridian and prime directions of the DOV, respectively.
Results and analysis
Accuracy analysis of SWOT SSH
The SSH differences at crossover points serve as an indicator of altimetry data consistency and are widely utilized for evaluating SSH accuracy. The wide-swath data from both sides of SWOT are resampled into a regular grid with a spacing of 2 km, maintaining the same ground track across different cycles. By averaging data from the same track over cycles 1 to 18, high-precision SSH data can be obtained. The discrepancies in SSH at the crossover points are computed using the averaged SSH data. The accuracy of the SWOT SSH is then evaluated based on the proportional relationship between the altimetric precision and the crossover discrepancies. The crossover discrepancies for cycle 3 of SWOT, as well as the multi-cycle averaged data, are calculated separately, as listed in Table 2.
The calculation results indicate that the RMS of the crossover discrepancies for the SSH data from the third cycle is approximately 0.085 m. After co-line averaging, the RMS of the crossover discrepancies is reduced to 0.038 m. Averaging multi-cycle SSH data effectively mitigates the impact of systematic errors, thereby improving the accuracy of the SSH data. The precision of the SSH after co-line averaging for the third cycle of SWOT and the multi-cycle data is calculated to be 0.060 m and 0.027 m, respectively, according to Eq. (8). The GG precision can then be calculated using Eq. (9).
Analysis of results with different distance intervals
The GGs along and cross the track are computed using SWOT data from cycle 003. To improve the accuracy of the GG calculation, different distance intervals are initially set. Observation points at the corresponding distance intervals from each point are then selected to calculate the GG between the two points. The \(\xi\) and \(\eta\) of DOV are computed using the LSC method, and their accuracy is assessed using the SIO_DOV model, as shown in Table 3. The GA model is then derived using the IVM, and its precision is evaluated using the NCEI data, which has been corrected via quadratic polynomial fitting, as well as the SIO V32.1 gravity data, as shown in Table 4.
Table 3 shows that, when using the \(\xi\) and \(\eta\) of the SIO_DOV for evaluation, the meridian component of DOV calculated from along-track data exhibits the smallest RMS error at a distance interval of 6 km, while the prime component shows the smallest RMS at intervals of 10 km or 12 km. Meanwhile, the meridian component of DOV calculated from cross-track data achieves the highest accuracy at a distance interval of 8 km, and the prime component also reaches its highest accuracy at 8 km. Table 4 shows that, compared to the NCEI data, the RMS of the GA is smallest at an 8 km distance interval for along-track data, and at 6 km or 8 km intervals for cross-track data. The evaluation using the SIO gravity data reveals that the optimal distance interval for GAs calculated from along-track data is 8 km or 10 km, while for cross-track data, it is 6 km or 8 km. Based on the analysis above, when the distance interval is 8 km, both the \(\xi\) and \(\eta\) of DOV, as well as the GA calculated from along and cross track SSH, exhibit relatively high precision.
Combined calculation of deflections of the vertical from along-track and cross-track
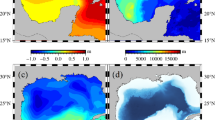
The SWOT wide-swath altimetry data from both the left and right sides are resampled into a regular 2 km grid. Different cycles share the same ground track without orbital offsets, and co-line averaging multi-cycle data at the same location results in the multi-cycle average SSH. The residual DOVs along the orbit and cross the orbit are calculated using the SWOT cycle003 data and the multi-cycle averaged SSH data, respectively. To examine the effect of cross-track data on DOV results, the residual DOVs are jointly calculated using along and cross track GGs. The \(\xi\) and \(\eta\) of DOV model, with a grid resolution of 1′×1′, are derived by recovering the reference field using the XGM2019e_2159 model. Figure 4 illustrates the DOV model derived from the joint calculation of along and cross track GG. Simultaneously, the \(\xi\) and \(\eta\) of DOV model with the same grid resolution are calculated and recovered based on Cryosat-2 and SARAL altimeter data using the LSC method. The computed DOV is compared with the SIO_DOV model for accuracy, as shown in Table 5.

DOV model derived from the combined computation of along-track and cross-track data. (a) Meridian component of DOV. (b) Prime component of DOV. (GMT v6.5.0, https://gmt-china.org/).
Table 5 shows, the precision of the \(\xi\) and \(\eta\) of DOV, calculated using the co-line averaged SWOT SSH data, is higher than that obtained from single-cycle data. This suggests that averaging SWOT sea surface height data across multiple cycles effectively reduces the impact of SSH temporal variations and improves the accuracy of the GG. When only along-track data is used to compute DOV, the precision of DOV calculated from single-cycle SWOT data is comparable to that obtained from SARAL data. The precision of the result from the co-line averaged SWOT data is the highest, while the precision of the result from Cryosat-2 data is the lowest. Traditional altimeters encounter similar issues when calculating DOV along the track direction, with poor solution quality and inconsistencies in the precision of the directional components. By analyzing DOV computed from co-line averaged data, the results show that, compared to DOVs derived from single along-track data, the inclusion of cross-track data improves the accuracy of the prime component by 0.18 urad. In comparison with traditional nadir altimeters, the SWOT wide-swath interferometer offers the advantage of obtaining two-dimensional SSH observations. By combining along and cross track GGs to compute the DOVs, the accuracy of the prime component is enhanced, thereby reducing the disparity between the \(\xi\) and \(\eta\).
Gravity anomaly accuracy evaluation
Based on the consistency of SWOT orbital data across different cycles, the average SSH for cycles 1 to 18 is computed. The co-line averaged SSH is then used to calculate the GGs both along and cross the track. The GA model is calculated separately using the single-cycle SSH and the co-line averaged SSH. The accuracy of the inverted GA model is evaluated using the NCEI data, as shown in Table 6. A comparative analysis of the inversion model is subsequently performed based on the accuracy assessment results.
Table 6 shows that the GA inverted using a single cycle of SWOT data exhibits lower accuracy. This is primarily due to the influence of observational errors, which lead to missing SSH data in the single cycle. By averaging SWOT data from multiple cycles, the precision of the SSH is improved, resulting in a high-precision GA model. When compared to the NCEI data, the GA calculated using SWOT data with an 8 km distance interval demonstrates better accuracy than that calculated with a 2 km distance interval. This suggests that by selecting the optimal distance interval, the calculation precision of the GG can be enhanced, thereby improving the precision of the GA solution.
To analyze the contribution of cross-track SSH to the results, the GA model was derived by combining GGs from both along and cross track, and the precision of the model was evaluated using NCEI shipborne data. The results indicate that, compared to using data from a single-direction track, combining along and cross track SSH significantly enhances the precision of GA inversion from SWOT data. The inclusion of cross-track data is essential for obtaining a high-precision GA model.
For comparative analysis, GAs were calculated using SSH measurements from the traditional altimeter satellites, Cryosat-2 and SARAL, yielding the GA models Cryosat-2_GRA and SARAL_GRA. The SWOT_GRA model was derived by applying co-linear averaging to SWOT SSH data, using an optimal distance interval of 8 km, combined with GAs inverted from both along and cross track GGs, as shown in Fig. 5. The accuracy of five GA models (Cryosat-2_GRA, SARAL_GRA, SWOT_GRA, SIO V32_GRA, and SDUST2022_GRA) was evaluated using NCEI shipborne data, as shown in Table 7.

SWOT_GRA. The SWOT_GRA model was derived by applying co-linear averaging to SWOT sea surface height data, using an optimal distance interval of 8 km, combined with gravity anomalies inverted from both along and cross track GGs. (GMT v6.5.0, https://gmt-china.org/).

Histogram distribution of the differences between the five gravity anomaly models and NCEI shipborne data. The blue bars represent the percentage distribution of the differences, and the red curve indicates the normal distribution. (a) SWOT_GRA (b) Cryosat-2_GRA (c) SARAL_GRA (d) SIO V32_GRA (e) SDUST2022_GRA.
Figure 6 shows the histogram distribution of the differences between five GA models and NCEI data. Table 7; Fig. 6 show that, compared to the shipborne data, the SWOT_GRA model demonstrates higher accuracy than the other four GA models. The RMS of the difference between SWOT_GRA and NCEI data is 3.18 mGal, slightly higher than that of SDUST2022_GRA. Compared to SIO V32_GRA, the accuracy of SWOT_GRA improves by 3%, and compared to Cryosat-2_GRA and SARAL_GRA, it improves by about 8.5%. These results indicate that the GA derived from one year of SWOT satellite data (SWOT_GRA) outperform those obtained from approximately 13 years of conventional altimetry data (Cryosat-2_GRA and SARAL_GRA). This confirms that the inversion strategy proposed in this study can more effectively leverage the characteristics and advantages of SWOT data, resulting in the construction of a high-precision marine GA model.
Comparison of precision at different depths
The impact of seawater depth on the accuracy of GA inversion using altimetry data is discussed below. The seawater depth is divided into five ranges. For each depth range, the accuracy of SWOT_GRA, Cryosat-2_GRA, and SARAL_GRA is analyzed using NCEI shipborne data, as shown in Table 8.
Table 8 shows, when the water depth is less than 1 km, the marine GA model obtained exhibits the best accuracy compared to the NCEI data. This is because these points are located in shallow water areas with minimal variations in seafloor topography, leading to higher accuracy. The SWOT_GRA model achieves the highest accuracy, with an RMS of 2.77 mGal compared to the NCEI data, which is 0.40 mGal lower than Cryosat-2_GRA and 0.34 mGal lower than SARAL_GRA. When the water depth exceeds 4 km, the accuracy is the lowest compared to the NCEI data. An analysis is conducted using the difference results and the distribution of differences between the SWOT_GRA model and the NCEI data for depths greater than 4 km, along with the seafloor topography in this region.

Distribution of the difference between SWOT_GRA and NCEI shipborne gravity data at depths greater than 4 km, along with seafloor topography in this region. The dark gray areas represent land, the white areas indicate ocean, and the colored dots denote the differences between SWOT_GRA and NCEI shipborne gravity data in regions with water depths greater than 4 km. (GMT v6.5.0, https://gmt-china.org/).
Figure 7 shows that the terrain at depths greater than 4 km is primarily composed of trenches and ridges, where the seafloor topography undergoes sharp variations. These abrupt changes in seafloor features cause significant fluctuations in GA. Since the LSC method used for gravity inversion relies on altimetry data within a defined computational window, the inversion accuracy tends to decrease in areas with rapid variations in GAs. Consequently, in regions with pronounced seafloor topographic changes, the inversion accuracy of GA derived from satellite altimetry data is reduced. This results in the poorest accuracy for SWOT_GRA, Cryosat-2_GRA, and SARAL_GRA when the water depth exceeds 4 km. However, due to its higher resolution, SWOT is better equipped to handle the effects of sharp topographic changes. As a result, the accuracy of the GA derived from SWOT is higher than that from traditional altimetry satellites, with an RMS difference of 0.31 mGal smaller than Cryosat-2_GRA and 0.24 mGal smaller than SARAL_GRA when compared to NCEI data.
Conclusion
The new generation of the SWOT satellite, equipped with the KaRIn, is capable of providing high-resolution two-dimensional observations. To fully exploit the advantages of SWOT data, the two-dimensional data are decomposed into one-dimensional components along and cross the track. The GGs are then calculated for each direction at different distance intervals. This study demonstrates the advantages of SWOT scientific phase data in solving DOV components and inverting marine GAs, by comparing the results with those from traditional altimeter satellites, Cryosat-2 and SARAL.
-
(1)
This study determines the optimal distance interval by calculating DOVs and GAs using single-cycle along and cross track data. The GA, calculated using the averaged SSH from cycles 1 to 18, shows better precision at a distance interval of 8 km compared to that calculated at a 2 km distance interval when evaluated against NCEI shipborne data.
-
(2)
The precision of DOVs in the east-west direction improves by incorporating cross-track data, reducing the disparity between the \(\xi\) and \(\eta\). Compared to using only along-track data for GA inversion, the inclusion of cross-track data significantly enhances inversion accuracy using SWOT data. The inclusion of cross-track data is crucial for developing an accurate GA model.
-
(3)
The accuracy of marine GA inversion using altimetry SSH is affected by water depth and seafloor topography. In shallow areas with minimal changes in seafloor topography, the accuracy of the inverted models is high. However, when the water depth exceeds 4 km and seafloor topography undergoes significant changes, the precision of SWOT_GRA, Cryosat-2_GRA, and SARAL_GRA decreases. Despite this, the model accuracy derived from SWOT data remains higher than that obtained from traditional altimeter satellites.
-
(4)
Based on the remove-restore method, the GA model inverted from SWOT SSH shows the highest accuracy compared to those inverted from traditional altimeter data. SWOT_GRA improves accuracy by approximately 8.5% compared to Cryosat-2_GRA and SARAL_GRA.
The study demonstrates that, compared to traditional altimetry satellites, the wide-swath data from the SWOT satellite during its scientific phase significantly improves the accuracy of marine DOV and the gravity field.
Data availability
All the data necessary to assess the conclusions of the paper are provided within the manuscript. For further data related to this study, please contact Weishuang Yan (weishuangyan326@163.com).
References
Guo, J. et al. Accuracy comparison of marine gravity derived from HY-2A/GM and CryoSat-2 altimetry data: A case study in the Gulf of Mexico. Geophys. J. Int. 230, 1267–1279 (2022).
Schaeffer, P. et al. The CNES_CLS11 global mean sea surface computed from 16 years of satellite altimeter data. Mar. Geod. 35, 3–19 (2012).
Fu, L. L. On the decadal trend of global mean sea level and its implication on ocean heat content change. Front. Mar. Sci. 3, 37 (2016).
Andersen, O. B. et al. Improving the coastal mean dynamic topography by geodetic combination of tide gauge and satellite altimetry. Mar. Geod. 41, 517–545 (2018).
Yuan, J. et al. SDUST2020 MSS: a global 1′ × 1′ mean sea surface model determined from multi-satellite altimetry data. Earth Syst. Sci. Data 15, 155–169 (2023).
Hwang, C. & Chang, E. T. Y. Seafloor secrets revealed. Science 346, 32–33 (2014).
Yang, J., Jekeli, C. & Liu, L. Seafloor topography estimation from gravity gradients using simulated annealing. J. Geophys. Res. Solid Earth 123, 6958–6975 (2018).
Andersen, O. B., Knudsen, P. & Berry, P. A. M. The DNSC08GRA global marine gravity field from double Retracked satellite altimetry. J. Geod. 84, 191–199 (2010).
Sandwell, D. T., Müller, R. D., Smith, W. H. F., Garcia, E. & Francis, R. New global marine gravity model from CryoSat-2 and Jason-1 reveals buried tectonic structure. Science 346, 65–67 (2014).
Zhu, C. et al. SDUST2021GRA: Global marine gravity anomaly model recovered from Ka-band and Ku-band satellite altimeter data. Earth Syst. Sci. Data 14, 4589–4606 (2022).
Zhu, F. et al. SDUST2020MGCR: A global marine gravity change rate model determined from multi-satellite altimeter data. Earth Syst. Sci. Data 16, 2281–2296 (2024).
Yuan, J. et al. High-resolution sea level change around China seas revealed through multi-satellite altimeter data. Int. J. Appl. Earth Obs. Geoinf. 102, 102433 (2021).
Escudier, R., Bouffard, J., Pascual, A., Poulain, P. M. & Pujol, M. I. Improvement of coastal and mesoscale observation from space: Application to the Northwestern mediterranean sea. Geophys. Res. Lett. 40, 2148–2153 (2013).
Fu, L. L. & Morrow, R. Observing the ocean surface topography at high-resolution by the SWOT (Surface water and ocean Topography) mission, 3783–3784 (2018).
Morrow, R. et al. Global observations of fine-scale ocean surface topography with the surface water and ocean topography (SWOT) mission. Front. Mar. Sci. 6, 232 (2019).
Fu, L. L. et al. The Surface Water and Ocean Topography Mission: A breakthrough in radar remote sensing of the ocean and land surface water. Geophys. Res. Lett. 51, e2023GL107652 (2024).
Hwang, C. & Yu, D. Transforming coastal mapping from space. Science 386, 1222–1223 (2024).
Yu, D., Hwang, C., Andersen, O. B., Chang, E. T. Y. & Gaultier, L. Gravity recovery from SWOT altimetry using geoid height and geoid gradient. J. Remote Sens. Environ. 265, 112650 (2021).
Ma, G., Jin, T., Jiang, P., Shi, J. & Zhou, M. Calibration of the instrumental errors on marine gravity recovery from SWOT altimeter. Mar. Geod. 46, 496–522 (2023).
Yu, Y., Sandwell, D. T., Dibarboure, G., Chen, C. & Wang, J. Accuracy and resolution of SWOT altimetry: Foundation seamounts. Earth Space Sci. 11, e2024EA003581 (2024).
Guo, H., Wan, X. & Wang, H. Validation of just-released SWOT L2 KaRIn beta prevalidated data based on restoring the marine gravity field and its application. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 17, 7878–7887 (2024).
Wang, J. et al. Improving high-frequency marine gravity anomaly recovery: The efficacy of SWOT wide-swath altimetry. IEEE Geosci. Remote Sens. Lett. 21, 7505905 (2024).
Yu, D., Deng, X., Andersen, O. B., Zhu, H. & Luo, J. A new method for determining geoid gradient components from SWOT wide-swath data for marine gravity field. J. Geod. 99, 29 (2025).
Ismael, I. M. Tectonostratigraphic stages in the Mesozoic opening and subsidence of the Gulf of Mexico based on deep-penetration seismic reflection data in the salt-free eastern part of the basin. Ph.D. dissertation, University of Houston, Houston (2014).
Fairhead, J. D., Green, C. M. & Odegard, M. E. Satellite-derived gravity having an impact on marine exploration. Lead. Edge 20, 873–876 (2001).
Surface Water and Ocean Topography (SWOT). SWOT product description L2_LR_SSH_20220902 RevA. NASA PO.DAAC. https://archive.podaac.earthdata.nasa.gov/podaac-ops-cumulus-docs/web-misc/swot_mission_docs/pdd/D-56407_SWOT_Product_Description_L2_LR_SSH (2023).
Jet Propulsion Laboratory (JPL). SWOT Science Data Products User Handbook, JPL D-109532, Jet Propulsion Laboratory, Pasadena. https://archive.podaac.earthdata.nasa.gov/podaac-ops-cumulus-docs/web-misc/swot_mission_docs/D-109532_SWOT_UserHandbook_20240502.pdf (2024).
Schaeffer, S. et al. The CNES CLS 2022 mean sea surface: Short wavelength improvements from CryoSat-2 and SARAL/AltiKa High-Sampled altimeter data. Remote Sens. 15, 2910 (2023).
Labroue, S., Boy, F., Picot, N., Urvoy, M. & Ablain, M. First quality assessment of the Cryosat-2 altimetric system over ocean. Adv. Space Res. 50, 1030–1045 (2012).
Raney, R. K. & Phalippou, L. The future of coastal altimetry. In Coastal Altimetry 535–560 (Springer, 2011).
Mulet, S. et al. The new CNES-CLS18 global mean dynamic topography. Ocean Sci. 17, 789–808 (2021).
Zingerle, P., Pail, R., Gruber, T. & Oikonomidou, X. The combined global gravity field model XGM2019e. J. Geod. 94, 66 (2020).
Sandwell, D. T., Harper, H., Tozer, B. & Smith, W. H. F. Gravity field recovery from geodetic altimeter missions. Adv. Space Res. 68, 1059–1072 (2021).
Li, Z. et al. The SDUST2022GRA global marine gravity anomalies recovered from radar and laser altimeter data: Contribution of ICESat-2 laser altimetry. Earth Syst. Sci. Data 16, 4119–4135 (2024).
Wang, J., Guo, J., Liu, X., Shen, Y. & Kong, Q. Local oceanic vertical deflection determination with gravity data along a profile. Mar. Geod. 41, 24–43 (2017).
Hwang, C. & Parsons, B. Gravity anomalies derived from Seasat, Geosat, ERS-1 and TOPEX/POSEIDON altimetry and ship gravity: A case study over the Reykjanes ridge. Geophys. J. Int. 122, 551–568 (1995).
Zhu, C. et al. Sea surface heights and marine gravity determined from SARAL/AltiKa Ka-band altimeter over South China sea. Pure Appl. Geophys. 178, 1513–1527 (2021).
Zhu, C. et al. Marine gravity determined from multi-satellite GM/ERM altimeter data over the South China sea: SCSGA V1.0. J. Geod. 94, 50 (2020).
Zhou, R. et al. On performance of vertical gravity gradient determined from CryoSat-2 altimeter data over Arabian sea. Geophys. J. Int. 234, 1519–1529 (2023).
Tscherning, C. C. & Rapp, R. H. Closed covariance expressions for gravity anomalies, geoid undulations, and deflections of the vertical implied by anomaly degree variance models. Rep. 208, Ohio State Univ., Columbus (1974).
Sun, M. et al. Analysing the impact of SWOT observation errors on marine gravity recovery. Geophys. J. Int. 237, 862–871 (2024).
Hwang, C. Inverse Vening Meinesz formula and deflection-geoid formula: Applications to the predictions of gravity and geoid over the South China sea. J. Geod. 72, 304–312 (1998).
Acknowledgements
We are very grateful to AVISO for providing the altimeter data, and NCEI for providing the shipborne gravity data. We also thank CNES for the MDT model provided for this study, SIO for the SIO V32.1 model, SDUST for the SDUST2022GRA, and TUM for the XGM2019e_2159 model.
Funding
This study is supported by the National Natural Science Foundation of China (grant Nos. 42430101, 42274006, 42171426).
Author information
Authors and Affiliations
Contributions
W.Y. conducted the experiments, performed data analysis, and wrote the manuscript. J.G. assisted in the development of the research design, supervised, and facilitated the data analysis. X.L., Z.L., C.Z., Y.S., and L.H. contributed to the manuscript writing.
Corresponding author
Ethics declarations
Competing interests
The authors declare no competing interests.
Additional information
Publisher’s note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution-NonCommercial-NoDerivatives 4.0 International License, which permits any non-commercial use, sharing, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if you modified the licensed material. You do not have permission under this licence to share adapted material derived from this article or parts of it. The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by-nc-nd/4.0/.
About this article

Cite this article
Yan, W., Liu, X., Li, Z. et al. Performance of marine gravity anomalies extracted from SWOT KaRIn data of science phase in the Gulf of Mexico. Sci Rep 15, 38385 (2025). https://doi.org/10.1038/s41598-025-22242-5
Received:
Accepted:
Published:
Version of record:
DOI: https://doi.org/10.1038/s41598-025-22242-5
