
Abstract
With the rapid increase in the population, transportation systems are challenged by several issues. Traffic congestion is customary and traffic accidents occur frequently deteriorating traffic environments. To take the edge off these issues and enhance transportation efficiency, accurate traffic forecasting is critical. Accurate temporal time time-dependent traffic predictions are essential for ensuring the safety and efficiency of an intelligent traffic management system. Nevertheless, owing to the intrinsic spatial and temporal dependencies of traffic flow it is still a challenging problem. To solve this, some methods are proposed taking into consideration the detailed traffic patterns across major roads and intersections, while complicated spatiotemporal dynamics and interdependencies between traffic flows are not taken into account. In this work, a method called Gaussian Dual Adjacency Graph-based Spatial Correlated and Temporal Time-dependent (GDAG-SCTT) traffic prediction in Bangalore city is proposed. Initially with the raw traffic patterns obtained from Bangalore’s traffic pulse dataset as input are subjected to three different processes, namely, pre-processing and feature extraction. First, Local-Global Invariant Inter Quartile and Min-Max Normalization based Traffic Data Pre-processing is applied to the Bangalore’s traffic pulse dataset. Next, the extraction of spatial and temporal features is done by using a Gaussian Kernel Dynamic Adjacency based Spatial Correlated and Temporal Time-dependency based feature extraction model. By applying this pre-processing outliers are removed and finally normalized pre-processed results are obtained. Followed by which, using Spatial Correlated Graph Convolutional Neural Network spatial features are extracted and using Temporal Long Short Term Time-dependency Memory temporal features are extracted. To evaluate the GDAG-SCTT method’s performance, classification metrics like precision, recall and accuracy along with regression metrics like root mean square error, training time are validated and analyzed. The GDAG-SCTT achieved higher performance compared to other state-of-the-art methods on our collected Bangalore’s traffic pulse dataset demonstrating the efficiency in reducing root mean square error by 28% while improving overall accuracy by 25% in an extensive manner.
Similar content being viewed by others
Introduction
Data science has made an appearance as a pivotal field over the past few decades, validating the knowledge extraction, detection of patterns and data-driven discernments for informed decision-making. The expeditious population growth and vehicles have led to numerous other issues, including, time spent in traffic, increase in fuel consumption, an increase in accidents, generating an urgent requirement for intelligent vehicular systems that can manage and control in an efficient manner. These systems are indispensable not only for administering the city but also for independent passengers. Intelligent Transportation Systems (ITS) are essential in transforming the transportation industry by making use of traffic data for efficient decision making and traffic control accordingly.
A Layered Training Graph Convolutional Network (LT-GCN) was proposed in1 to minimize the training time considerably. As an alternative to parameters training in all hidden layers concurrently, using LT-GCN a layer-by-layer training pattern was designed to minimize the computational complexity involved during the training process. Following this LT-GCN was then combined with a Gated Recurrent Unit (GRU) for extracting both time-correlated and space-correlated traffic flow features for achieving accurate prediction. This in turn minimized training time, memory usage and root mean square error with improved prediction accuracy. Despite improvement in training time and prediction accuracy however the recall rate, i.e. how well a method ascertains all traffic instances of a specific traffic condition from actual occurrences involved in traffic prediction was not focused on. To address this issue, Gaussian Kernel Dynamic Adjacency based Spatial Correlated and Temporal Time-dependency based feature extraction is applied which in turn improves the overall recall rate. Exceptionally, several Deep Learning (DL) algorithms achieve state-of-the-art performance in traffic prediction but still lack interpretability.
A flexible framework called, Traffexplainer was proposed in2 toward graphical neural network based traffic prediction. The framework consisted of the GNN-based traffic prediction and perturbation-based hierarchical interpretation generator. To be more specific, hierarchical spatial mask and temporal mask were introduced with the intent of perturbing prediction by modulating input data. Following this the prediction losses were propagated backward which in turn aided in ascertaining the most critical features for traffic prediction, therefore improving prediction performance with minimal root mean square error. In spite of the minimization of root mean square error however the training time was not focused. To address this research gap, Local-Global Invariant Inter Quartile and Min-Max Normalization based Traffic Data Pre-processing is applied which by identifying outliers and minimizing overfitting reduces the overall training time involved in traffic prediction. Employing neural networks to generate predictions of short term results is an increasingly popular topic specifically since the evolution of transportation systems has increased substantially with the accessibility of large traffic data from several sources.
In3, Spatio Temporal Graph Convolutional Neural Network (STGCNN) was proposed with the intent of handling spatio-temporal graphs. The STGCN architecture was extended to handle multivariate graph input features via a novel framing of traffic prediction as a command execution mapping. This in turn improved overall prediction performance.
In4, an algorithm accomplishing short-term predictions of vehicle flow and vehicle speed was proposed. The algorithm was based on a physics-aware recurrent neural network. In addition, discretization of a macroscopic traffic flow model was integrated with the network framework, therefore generating traffic state estimations and predictions in a precise manner. Recognizing traffic future trends in advance is receiving greater interest however accurate prediction remains challenging.
The increasing traffic surveillance availability along with operational data has brought both advantages and issues for the ITS. In5, deep learning technique called, Knowledge-Sequence-to-Sequence(K-Seq2Seq) was proposed to address the short terms traffic prediction problem by means of temporal knowledge and predicting future traffic with minimal error. However, optimization of traffic management was not ensured. To address this research gap, a deep learning method that combines the advantages of wavelet and recurrent neural network was designed in6 therefore generating high prediction accuracy. With the swift evolution of deep learning and neural networks, a plethora of efficient methods have been designed to address the short term traffic prediction issue. Nevertheless, the flow of traffic from distinct time spots may include different features. In7, an adaptive composite framework, named Long-Short-Combination (LSC) was proposed with excellent forecasting performance.
Recent research works utilized a Graph Convolutional Network (GCN) along with a time-series model for traffic flow forecasting by encapsulating the spatial–temporal features. Nevertheless, accurate traffic prediction is challenging due to the reason that the traditional GCN only takes into consideration the adjacent road link impact. To address this aspect, a multi-graph learning model was designed in8 for predicting traffic propagation in urban road networks accurately. A survey of traffic flow prediction methods employing different pre-processing and deep learning methods was investigated in9. The unmatched evolutions in deep learning have dispensed extensive opportunities to grasp traffic data obtained from several road network locations, constraining the model’s action ability. A systematic overview of literature committed to spatiotemporal traffic forecasting was designed in10. A comprehensive review of novel machine learning and deep learning techniques applied in traffic prediction as proposed in11.
A detailed survey of traffic prediction algorithms for short term based on Long Short Term Memory (LSTM) designed in the last three years was analyzed in12. Also thorough algorithms description concentrating on deep learning algorithms was presented. Furthermore, to the mobility of vehicles, road network features, holidays and peak hours play a pivotal role in determining traffic. In13, a hybrid gated recurrent network with LSTM was proposed for determining traffic in smart cities. The hybrid method in turn revealed improved accuracy extensively.
Research gap
The foremost objective of traffic prediction using traffic patterns aims to forecast future traffic conditions, to name a few being, traffic volume and time to optimize transportation and minimize congestion, thus improving training time and accuracy in the near future. Using the Layered Training Graph Convolutional Network (LT-GCN)1 method though ensured minimal training time with improved accuracy however, overfitting was not focused on. Traffexplainer2 though with the aid of a gated GRU, resulted in impressive accuracy however the training time which remains to be one of the major factors for traffic prediction was not addressed.
Contributions of the work
Motivated by the above issues, like, training time, precision, recall and accuracy in the traffic prediction process, in this work, a method called, Gaussian Dual Adjacency Graph-based Spatial Correlated and Temporal Time-dependent (GDAG-SCTT) using traffic patterns from Bangalore city is proposed. The major contributions of this work are pointed out below.
-
To present a significant method for intelligent traffic prediction called the Gaussian Dual Adjacency Graph-based Spatial Correlated and Temporal Time-dependent (GDAG-SCTT).
-
To propose Local-Global Invariant Inter Quartile for addressing traffic data overfitting and design of Min-Max normalization based Pre-processing for removing outliers, therefore reducing training time and root mean square error and ensuring robust traffic prediction.
-
To present a Gaussian Kernel Dynamic Adjacency based Spatial Correlated and Temporal Time-dependency based feature extraction model for ensuring precision and recall (i.e., both quality and quantity) incurred in traffic prediction.
-
Finally, the performance of the proposed GDAG-SCTT method for traffic prediction is compared with the conventional state-of-the-art methods.
Work organization
The organization of the work is mentioned as given below. Section 2 provides related works on traffic prediction using pre-processing and deep learning techniques. Section 3 provides an elaborate representation of the method called, Gaussian Dual Adjacency Graph-based Spatial Correlated and Temporal Time-dependent (GDAG-SCTT). After that, Sect. 4 introduces the case study with experimental results and a comprehensive evaluation study between the proposed GDAG-SCTT method and two other existing methods via a table and graphical representation. Finally, Sect. 6 concludes the paper.
Related works
Efficient traffic prediction is pivotal for urban transportation optimization, reducing congestion and improving overall efficiency. Traffic congestion causes increased travel durations, higher consumption of fuel and increased environmental pollution. To handle these issues, a hybrid sophisticated deep learning technique combining gated recurrent, convolutional neural and LSTM networks was proposed in14. Employing this hybrid mechanism resulted in the overall traffic prediction. Nevertheless, in spite of the extensive literature, the prediction of traffic flow is found to be demanding as far as long-term traffic is concerned. Based on this drawback, a novel deep ensemble model to concentrate on long-term traffic prediction was presented in15 with a minimal error rate. Yet another multi factor fusion method employing spatiotemporal and graph convolution was proposed in16 to improve prediction performance.
With the rapid increase in urban population, intelligent transportation systems are affected by several issues. Among them congestion in traffic is found to be most prevalent and hence deteriorating the so called traffic environments. To address this research gap and boost urban transportation efficiency, a comprehensive overview of traffic forecasting, covering data analysis, data modeling and forecasting related to traffic was investigated in27. Nevertheless, a unified metric focusing on complexity was not developed. Yet another case study focusing on traffic prediction and identification of deviation in the case of congestion employing deep learning was designed in18.
Several recent research studies emphasize the requirement to improve prediction accuracy by addressing temporal and spatial dependencies. However, owing to the complexity involved in spatio and temporal patterns, accurate traffic predictions are still a demanding issue. A comprehensive overview was first designed following which a Long-Term Spatio-Temporal Graph Attention Network was analyzed in detail in19. Yet another method to predict complex network traffic employing time space encoding was proposed in20 with improved accuracy. Also to solve the dynamic changing traffic condition dynamic diffusion mechanism as introduced in21.
With the proliferation and increase in traffic volume, continuing traffic accidents have notably influenced the safety of the public. Yet another multi-feature spatiotemporal pattern analysis employing a periodic fused graph convolution network was presented in22 with minimal error. A spatiotemporal graph learning employing multi-head self attention as designed in23 to address challenges in traffic forecasting.
Timely and accurate traffic prediction is demanding as far as urban traffic control and guidance is concerned. Owing to the high nonlinearity and traffic flow complexity, conventional methods do not satisfy mid and low term prediction and frequently ignore spatial and temporal dependencies. In24 a novel deep learning method called, Spatio-Temporal Graph Convolutional Networks (STGCN) was proposed to handle time series prediction. Instead of a conventional CNN with the aid of recurrent units, faster training speed was possible with fewer metrics. A heterogeneous fundamental diagram along with a Markov chain and long short term memory was designed in25 for predicting traffic flow with minimal error. The mechanism of traffic flow physics and graph neural network algorithms was combined in26 to capture complex spatio temporal dependencies involved in prediction. Combining these mechanisms in turn resulted in the improvement of prediction accuracy. Yet another spatio temporal graph model embedding spatial relationships with a dynamic graph was designed in27 with minimal mean absolute error.
Traffic prediction turning at urban intersections is paramount for dynamic optimization of traffic management techniques however accuracy is frequently impacted by missing data. In28 a novel mechanism called, Heterogeneous Two-Layer Graph Convolution (HTLGC) was proposed with the intent of improving prediction accuracy in addition to focusing on the missing data issues. Moreover, vehicle trajectory data plays a preliminary aspect as far as an intelligent traffic management system is concerned. Nevertheless, missing trajectory segments owing to heavy interruption in the signal frequently fail to meet the precision aspects. A trajectory-conditional generative adversarial network (T-CGAN) method was presented in29 to address the issue of missing trajectory imputation across multiple consecutive intersections.
A summary of existing materials and methods employed, their advantages, drawbacks and the datasets used are detailed in Table 1.
Motivated by the above literature, in this work a robust intelligent transportation method for traffic prediction using Gaussian Dual Adjacency Graph-based Spatial Correlated and Temporal Time-dependent (GDAG-SCTT) is proposed. The elaborate description of the GDAG-SCTT method is provided in the following sub-sections.
Materials and methods
Inspired by the above analysis, the Gaussian Dual Adjacency Graph-based Spatial Correlated and Temporal Time-dependent (GDAG-SCTT) traffic prediction in Bangalore city is proposed to model invariant relations in dynamic graphs across temporal environments. The GDAG-SCTT method consists of two modules, a pre-processing model and a feature extraction model. The overview of the GDAG-SCTT method for robust traffic prediction in Bangalore city is shown in Fig. 1.

Overview of the GDAG-SCTT method for robust traffic prediction in Bangalore city.
As shown in the above figure the overview of the GDAG-SCTT method is split into two parts, namely pre-processing and feature extraction. To model the entire process traffic prediction in our work is made via a road network for which the briefing is done in the following sub-sections. First, the Bangalore’s traffic pulse dataset traffic patterns obtained from https://www.kaggle.com/datasets/preethamgouda/banglore-city-traffic-dataset/dataare subjected to pre-processing employing Local-Global Invariant Inter Quartile and Min-Max normalization model. Hereby by using the Local-Global Invariant Inter Quartile model aids in handling overfitting and on the other hand by using Min-Max normalization removes the outliers. Second, the pre-processed traffic patterns are subjected to two different feature extraction models, namely, spatial and temporal patterns concurrently. To extract spatial features, a Spatial Correlated Graph CNN is applied and to extract temporal features, a Temporal Long Short Term Time-dependency model is applied. Finally, both the spatial and temporal features are combined in the fully connected layer for making traffic prediction. The elaborate description of the proposed method is provided in the following sub-sections.
Traffic data collection
Traffic data is collected for the proposed traffic prediction method from Bangalore’s Traffic Pulse data https://www.kaggle.com/datasets/preethamgouda/banglore-city-traffic-dataset/data. This Bangalore’s Traffic Pulse dataset captures detailed traffic patterns covering major roads and intersections in Bangalore. Some of the traffic features consist of traffic volume, speed, congestion levels, and environmental impact, imparting a complete view of Bangalore’s city’s transportation dynamics. Table 2 given below lists the 16 traffic features present in the dataset along with their description.
As far as data quality is concerned with the dynamic nature of Bangalore’s traffic refers to that data can become outdated specifically with the swift increase in private vehicles and evolving infrastructure. Also in-depth analysis of vehicle types may even pave the way for accurate prediction. By employing the above traffic features provided in the table, traffic prediction in Bangalore city is designed using the road network as given below.
Road network
In this work, the traffic prediction problem is defined via a road network as a weighted directed graph ‘\(\:G=\left(V,E\right)\)’. Here, ‘\(\:V=\left\{{v}_{1},\:{v}_{2},\:\dots\:,{v}_{m}\right\}\)’ represents the set of nodes. In our work, the traffic patterns or samples (i.e. ‘\(\:S\)’) across major roads and intersections in Bangalore are treated as nodes. On the other hand, ‘\(\:E=\left\{{e}_{1},\:{e}_{2},\:\dots\:,{e}_{M}\right\}\)’ denotes the set of edges. Here, ‘\(\:{e}_{i}\)’ represents the pair-wise connections between nodes or samples, with ‘\(\:m\)’ representing the number of nodes or samples and ‘\(\:M\)’, the number of edges. The predominant motivation of traffic prediction via a road network is to predict upcoming traffic situations, permitting better management of traffic and reduced congestion. This encompasses traffic flow prediction on several road segments to boost overall transportation efficiency and safety.
Also ‘\(\:AM\in\:\:{\mathbb{R}}^{m*m}\)’ denotes the static adjacency matrix of the constructed road graph ‘\(\:\stackrel{\sim}{{AM}_{1}}=\stackrel{\sim}{{AM}_{1}}+AM\)’. Following which ‘\(\:X\:\in\:{\mathbb{R}}^{m*n}\)’ is the sample matrix denoting traffic information of a set of nodes or samples, where ‘\(\:n\)’ represents the dimension of each node’s feature or simply the number of features assigned to each sample in the graph. This is mathematically formulated as given below.
From the above Eq. (1), the sample matrix ‘\(\:X\)’ denoting traffic information of a set of nodes forming ‘\(\:m\)’ samples ‘\(\:{S}_{m}\)’ with respect to ‘\(\:n\)’ features ‘\(\:{F}_{n}\)’ are formulated for further processing. The traffic prediction problem is then defined as learning a function ‘\(\:f\)’ that is competent to predict future traffic states in the next ‘\(\:t\)’ time steps with respect to ‘\(\:T\)’ iterations is mathematically formulated as given below.
Then, the traffic prediction is formulated as given below.
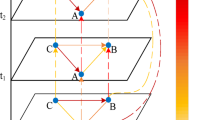
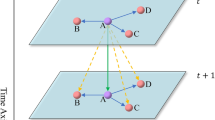
From the above Eqs. (2) and (3) ‘\(\:{X}^{{\prime\:}}\)’ denotes the vector of traffic predicted values and ‘\(\:X\)’ represents the vector of traffic actual values with respect to the weighted directed graph ‘\(\:G\)’. Figure 2 given below shows the sketch of applying the traffic prediction model on a road network graph.

Traffic prediction model on a road network graph data.
The above designed road network graph data aids in predicting traffic for fine-tune adjustments and minimizing delays. By applying the above road network graph data in the proposed method swift re-routing strategies can be easily applied by concerned authorities therefore reducing congestion. The Smart Urban Mobility and Congestion Management Design Philosophy is displayed using Fig. 3 below.

Smart urban mobility and congestion management design philosophy.
Data collection
Data collection being the preliminaries involves information gathering to predict future traffic for better management of traffic and congestion with improved security. In our work, Bangalore’s Traffic pulse dataset is used for making intelligent predictions.
Pre-processing
To improve the proposed method’s accuracy in a computationally efficient manner, Local-Global Invariant Inter Quartile and Min-Max Normalization-based pre-processing is applied. This pre-processing model aids in removing outliers and handling overfitting efficiently.
Spatial traffic patterns
The Spatial Correlated Graph Convolutional Neural Network-based feature extraction applied in our work extracts relevant spatial features required for traffic prediction.
Temporal traffic patterns
The Temporal Long Short Term Time-dependency Memory based feature extraction in our work on the other hand extracts time dependence temporal patterns for making accurate traffic prediction.
Performance metrics
We have implemented several performance metrics, precision, recall, accuracy, root mean square error and training time using the Bangalore’s traffic pulse dataset. The detailed representation of the proposed method is provided in the following sub-sections.
Local-global invariant inter quartile and Min-Max normalization based traffic data Pre-processing
The collected traffic data (Bangalore’s Traffic Pulse data https://www.kaggle.com/datasets/preethamgouda/banglore-city-traffic-dataset/data) posed biased samples, outliers and data sparsity challenges. To deal with these issues, numerous models were designed and developed by researchers for data pre-processing. In our work, to minimize overfitting of traffic data along with outlier removal employing Local-Global Invariant Inter Quartile and Min-Max normalization based Pre-processing is performed for traffic prediction. Figure 4 shows the structure of traffic data pre-processing using the Local-Global Invariant Inter Quartile and Min-Max Normalization model.

Block diagram of Local-Global Invariant Inter Quartile and Min-Max Normalization based Traffic Data Pre-processing.
Given the time-based or time-varying characteristic in spatio Temporal data, time steps are considered as the virtual environments that fundamentally review several contexts like traffic volume, speed, congestion levels, and environmental impact, providing a comprehensive view of the city’s transportation dynamics. Nevertheless, encapsulating the step-level customary invariability across all steps brings about extreme sparsity of overall invariant relations. Hence, attaining the tradeoff of temporal partition is the basis of spatio temporal invariant learning.
In this work, we employ the invariance across time steps by further splitting the time-based factor or environment (i.e. time based) into different fragments where the time steps in each fragment are formed as samples within the same sub-environment (i.e. spatial based or road/intersection name in our work) according to the traffic observation date. To facilitate data pre-processing, i.e. to remove outliers and minimize overfitting by standardizing numerical features, the same fragment index in different periods are considered as the same sub-environments so as to adjust samples to separately train different samples or training patterns according to temporal divisions.
To start with given spatio temporal observations or sample matrix ‘\(\:X\)’ and ‘\(\:K\)’ sub-environments(road/intersection name in our work) with respect to the traffic observation date temporal environment division is generated by maximizing discrepancy distances between pairs of fragment divisions. This is performed with the intent of giving a better indication of distribution before the application of inter quartile range formulation and is represented as given below.
From the above Eq. (4), ‘\(\:{X}_{a}\)’ and ‘\(\:{X}_{b}\)’ denote the ‘\(\:a-th\)’ and ‘\(\:b-th\)’ fragments of divided observations with ‘\(\:{\alpha\:}_{1}\)’, ‘\(\:{\alpha\:}_{2}\)’ denoting the minimal and maximal operations in each fragment to avoid an insignificant solution. Then, to remove the outliers, the Inter Quartile Range for the above obtained temporal environment division is formulated as given below.
From the above Eq. (5) the outlier removed samples are obtained ‘\(\:{Res}_{O}\)’ based on the median of the ‘\(\:m\)’ smallest values ‘\(\:X\left({Q}_{1}\right)\)’ and on the median of the ‘\(\:m\)’ largest values ‘\(\:X\left({Q}_{3}\right)\)’ respectively. Nevertheless, optimizing directly as given in the above equation for ‘\(\:K\)’ divisions with spatio temporal data is laborious and time consuming, therefore resulting in overfitting. Hence to minimize overfitting, series splitting is applied to the spatio temporal environment division via local-global invariant measure. Then, for each time period let us construct ‘\(\:X\)’ divisions and each part will be the minimal unit that can be further split. Following this, search for ‘\(\:K\)’ is performed to obtain both locally and globally optimized division points, therefore minimizing overfitting.
Initially, spatial nodes in each step are considered and to measure the variations(i.e. local-global), spatio temporal observations are taken into consideration for the most part, where ‘\(\:{X}_{a}\in\:{\mathbb{R}}^{m*{T}_{a}}\)’ and ‘\(\:{T}_{a}\)’ denotes the number of time steps in fragment ‘\(\:a\)’. Next, to ascertain local-global invariant relations in each fragment the data discrepancy metric ‘\(\:DD\)’ is fine tuned into the modulus of cosine similarity ‘\(\:Cos\)’, where higher modulus of such similarity encapsulates both positive and negative correlations.
Precisely, from the above Eq. (6), the ‘\(\:a-th\)’ fragment contributes to ‘\(\:a-th\)’ sub-environment, that initiates from start indicator ‘\(\:{a}_{start}\)’ and ends at ‘\(\:{a}_{end}\)’ indicator ‘\(\:{Env}_{i}=\left\{{a}_{start}^{i},\dots\:,{a}_{end}^{i}\right\}\)’ and ‘\(\:\sum\:_{i=1}^{K}\left\{{a}_{start}^{i},\dots\:,{a}_{end}^{i}\right\}=T\)’. With this it is possible to explore both fragment-aware local in variance and global invariance under sub-environment divisions and minimize overfitting.
Following this Kronecker Delta based One-Hot encoding ‘\(\:OH\)’ is applied with categorical features (i.e. weather in our dataset) based on the data discrepancy criteria ‘\(\:DD\)’fine-tuned results that have a large number of unique values. This is mathematically represented as given below.
Finally, normalization employing the Min-Max normalization function is performed for other features than the above one-hot encoded results in the dataset with the intent of scaling data to a range between ‘\(\:0\)’ and ‘\(\:1\)’ as given below.
From the above Eq. (8) the pre-processed or normalized results ‘\(\:PD\)’, are arrived at based on the original values ‘\(\:{Res}_{O}\)’ and subtracting it from the minimum value ‘\(\:\text{min}\left({Res}_{O}\right)\)’ and dividing by the difference between the minimum and maximum value ‘\(\:\text{max}\left({Res}_{O}\right)-\text{min}\left({Res}_{O}\right)\)’ respectively. The pseudo code representation of Local-Global Invariant Inter Quartile and Min-Max Normalization based Traffic Data Pre-processing is given below.

Local-global invariant inter quartile and min-max normalization based traffic data pre-processing.
As given in the above algorithm with the objective of identifying and removing outliers resulting in a more accurate model, three different processes are performed with the raw data collected from Bangalore’s Traffic Pulse dataset. First, outliers are removed employing fragment-aware local invariance and global invariance Inter Quartile function. The second Kronecker Delta based One-Hot encoding function is applied by converting categorical data into model friendly format assists in running faster and provides more accurate results. Finally, the Min-Max normalization function is applied to the rest of the features that in turn notably influence the data quality and consistency therefore reducing root mean square error and training time extensively.
Gaussian kernel dynamic adjacency based spatial correlated and temporal time-dependency based feature extraction model
In addition to the static adjacency matrix of the constructed road graph, Gaussian kernel function is used to estimate the dynamic adjacency matrix. This aids in defining edge weights, where the edge weights between two nodes with a larger distance ‘\(\:\varvec{D}\varvec{i}\varvec{s}\)’are considered to be lower and the edge weights between two nodes with closer proximity are considered to be higher. As far as traffic prediction is concerned using a Gaussian kernel function serves to measure the adjacency matrix reflecting semantic associations between distinct road segments. This in turn aids in capturing local relationships by weighting connections and allowing the capture global dynamic traffic model by evaluating the semantic significance of associations between road segments on the basis of prevailing traffic conditions. This assists in enhancing prediction accuracy and the overall comprehension of traffic flow. This is mathematically represented as given below.
From the above Eq. (9), the value in ‘\(\:\stackrel{\sim}{{\varvec{A}\varvec{M}}_{2}\left(\varvec{p},\varvec{q}\right)}\)’,represents learned relationships of node ‘\(\:\varvec{p}\)’ and node ‘\(\:\varvec{q}\)’. Here node represents the captured traffic pattern. To obtain both the local and global features, the Dual Adjacency Matrix is designed by summing up ‘\(\:\stackrel{\sim}{{\varvec{A}\varvec{M}}_{1}}\)’ and ‘\(\:\stackrel{\sim}{{\varvec{A}\varvec{M}}_{2}}\)’ with a learnable parameter ‘\(\:\varvec{\eta\:}\)’ as given below.
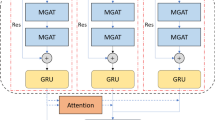
By employing the above Dual Adjacency Matrix ‘\(\:\varvec{D}\varvec{A}\varvec{M}\)’ the connection strength between nodes at each prediction step is fine tuned, to learn traffic prediction from a large amount of traffic data during the training process. To investigate more thoroughly the spatiotemporal dependencies of detailed traffic patterns across major roads and intersections in Bangalore, we propose the Gaussian Kernel Dynamic Adjacency based Spatial Correlated and Temporal Time-dependency based feature extraction model. Figure 5illustrates the architecture of the Gaussian Kernel Dynamic Adjacent Spatial Correlated and Temporal Time-dependency based feature extraction model, comprising four layers, namely, the input layer, the multi head attention-based graph convolutional layer, the LSTM layer, and the output layer.

Gaussian kernel dynamic adjacent spatial correlated and temporal time-dependency based feature extraction model.
The input layer receives pre-processed results ‘\(\:\varvec{P}\varvec{D}\)’ and target label dataset ‘\(\:\varvec{Y}\)’ (i.e. traffic predicted results). The succeeding Graph Convolutional Layer encapsulates spatial dependencies within the pre-processed results ‘\(\:\varvec{P}\varvec{D}\)’, improving feature extraction. The Graph Convolutional Layer uses a multi-head attention mechanism to encapsulate different relationships and feature importance in the weighted directed graph structure. The resulting sequence is input to the LSTM layer that encapsulates temporal dependencies therefore extracting temporal features. High-level features encompassing both the spatial and temporal from the previous layer are transmitted through fully connected layers to predict traffic flow in Bangalore city effectively. This extensive model validates the Gaussian Kernel Dynamic Adjacent Spatial Correlated and Temporal Time-dependency based feature extraction model to inspect both spatial and temporal dependencies and accurately predict traffic flow across major roads and intersections in Bangalore city.
Spatial correlated graph convolutional neural network-based feature extraction
Spatial Correlated Graph Convolutional Neural Network based feature extraction across major roads and intersections in Bangalore involves ascertaining and extracting relevant patterns and associations based on the traffic observation date. Here, the LeakyReLU activation function is employed alongside correlation analysis not only aids in capturing complex traffic data patterns but also using correlation analysis assists in ascertaining dependencies between different time periods in the same traffic observation date. Also the multi-head attention mechanism employed lengthens single attention head in the attention mechanism to multiple parallel attention heads, thereby independently attending to different parts of the input sequence permitting the model to capture detailed relationships. The operation procedure of the entire Spatial Correlated Graph Convolutional Neural Network is denoted by the following Eq.
From the above Eqs. (11), (12) and (13), ‘\(\:{\varvec{H}}_{1}\)’ denotes the output of the multi-head attention Graph Convolutional Neural Network and ‘\(\:\varvec{l}\)’ denotes the number of attention heads in the multi-head attention mechanism, with each head possessing its corresponding attention weight matrix and linear transformation matrix. Moreover, ‘\(\:{\varvec{A}}_{\varvec{l}}\)’ denotes the attention weight matrix of ‘\(\:\varvec{l}-\varvec{t}\varvec{h}\)’ head, with ‘\(\:{\varvec{W}}_{\varvec{l}}\)’, denoting the linear transformation matrix of ‘\(\:\varvec{l}-\varvec{t}\varvec{h}\)’ head, ‘\(\:{\varvec{D}}^{-\frac{1}{2}}\left(\varvec{D}\varvec{A}\varvec{M}\right)\)’ representing node degree of corresponding dual adjacency matrix, ‘\(\:\varvec{F}\)’ the feature matrix (i.e. 16 features) in the dataset, activated via the sigmoid activation function ‘\(\:\varvec{\sigma\:}\)’ respectively. Next ‘\(\:{\varvec{e}}_{\varvec{l}}\)’ denotes the attention weights between all nodes or features in ‘\(\:\varvec{l}-\varvec{t}\varvec{h}\)’attention head that are normalized employing the soft plus function. Moreover, ‘\(\:{\varvec{e}}_{\varvec{i}\varvec{j}}\)’ denotes the attention weight between node (feature)‘\(\:\varvec{i}\)’ and node (feature)‘\(\:\varvec{j}\)’. Finally, ‘\(\:{\varvec{F}}_{\varvec{i}}\)’ and ‘\(\:{\varvec{F}}_{\varvec{j}}\)’ represent the feature vectors of node (feature) ‘\(\:\varvec{i}\)’ and node (feature) ‘\(\:\varvec{j}\)’ respectively that have been applied with the correlation function ‘\(\:\varvec{C}\varvec{o}\varvec{r}\varvec{r}\)’ to ascertain relationships between different features at different locations or at different times.
Temporal long short term time-dependency memory based feature extraction
Subsequently, the Temporal Long Short Term Time-dependency Memory based feature extraction is employed to capture temporal dependencies. The central idea of Temporal Long Short Term Time-dependency Memory based feature extraction is to control the traffic flow information through gate units, namely, forget gate, input gate and output gate. The input get controls new traffic flow information into the cell state and on the other hand, forget gates decides upon which traffic flow information from the previous cell state should be eliminated. On the other hand, the output gate fine-tunes which traffic flow information from the cell state should be transferred to the next step. Finally, cell state allows gradients to flow through several times without vanishing. Figure 6 given below shows the structure of Temporal Long Short Term Time-dependency Memory based feature extraction model.

Temporal long short term time-dependency memory based feature extraction model [changes made].
As shown in the above figure, To start with the input gate is activated by means of the bias vector ‘\(\:{\varvec{B}}_{\varvec{i}\varvec{n}\varvec{p}}\)’ and current input feature sequence ‘\(\:{\varvec{F}}_{\varvec{i}\varvec{n}\varvec{p}}\)’ with respect to weight matrix ‘\(\:{\varvec{W}}_{\varvec{H}\varvec{i}\varvec{n}\varvec{p}}\)’ as given below.
In a similar manner, the forget gate employs the Sigmoid activation function to ascertain the retention measure for each previous hidden state. This is mathematically formulated as given below.
From the above Eq. (15) the forget gate results ‘\(\:{\varvec{f}\varvec{o}\varvec{r}}_{\varvec{t}}\)’ are activated via Sigmoid activation function ‘\(\:\varvec{\sigma\:}\)’ that in turn controls the degree of forgetting the previous hidden state results. Next, the equation given below defines a candidate value for update activation via the hyperbolic tangent activation function to generate a new candidate hidden state.
Following which the cell state for update purpose, transmitting and storing traffic flow information at each time is formulated as given below.
Finally with the aid of the above cell state traffic flow information, the activation value of output gate ‘\(\:{\varvec{o}\varvec{u}\varvec{t}}_{\varvec{t}}\)’ is generated as given below.
From the above Eqs. (18) and (19) the current hidden state ‘\(\:{\varvec{H}}_{\varvec{t}}={\varvec{O}\varvec{u}\varvec{t}}_{\varvec{t}}\)’ representing the output of the Temporal Long Short Term Time-dependency Memory based feature extraction is generated. The fully connected layer results are the results of the spatial feature ‘\(\:{\varvec{S}\varvec{F}}_{\varvec{t}}\)’ and the temporal feature ‘\(\:{\varvec{H}}_{\varvec{t}}\)’ as given below.
From the above Eq. (20), the fully connected results typically comprise a output representing the traffic date, area name, road/intersection name, area speed and congestion level respectively. The pseudo code representation of the Gaussian Kernel Dynamic Adjacent Spatial Correlated and Temporal Time-dependency based feature extraction for traffic prediction is given below.

Gaussian kernel dynamic adjacent spatial correlated and temporal time-dependency based feature extraction for traffic prediction.
As given in the above algorithm with the objective of improving precision and accuracy involved in traffic prediction, both spatial and temporal features are involved in the extraction process. First, as given above by using dynamic adjacent matrix instead of traditional adjacent matrix where not only vertices (also called features like, area name, road/intersection name) but also edges are grouped (i.e. relationship between area name and road/intersection name) for traffic prediction. This along with Spatial Correlated Graph Convolutional Neural Network aids in retrieving relevant spatial features (i.e. area name and road/intersection name), therefore improving overall precision and recall. Second by employing Temporal Long Short Term Time-dependency Memory, with the aid of LeakyReLU activation function ensures non-linearity required to obtain complex relationships and correlation analysis assists in ascertaining dependencies between different areas and time periods, therefore assisting in retrieved relevant temporal features (i.e. traffic volume, average speed and congestion level) in addition to generate feature (i.e. traffic date) resulting in more accurate traffic predictions.
Case study and implications
In this section case analysis of traffic prediction using Bangalore’s traffic pulse dataset are simulated by applying the Gaussian Dual Adjacency Graph-based Spatial Correlated and Temporal Time-dependent (GDAG-SCTT) method. Figure 7given below shows the original dataset details extracted for a sample of 100 rows and 16 columns.

Bangalore’s traffic pulse dataset details [changes made].
With the original dataset containing traffic patterns as shown below, initially, IQR-based outlier removal was applied with which the results generated are shown below onthe left-hand side (Fig. 8). Next, the corresponding one-hot encoded results are shown on the right-hand side (Fig. 8).

Traffic pattern pre-processed results after application of IQR-based outlier removal and one-hot encode [changes made].
Following which the normalized results are shown below in Fig. 9.

Normalized results.
Finally, the pre-processed traffic patterns are obtained as given below in Fig. 10.

Normalized and pre-processed traffic pattern [changes made].
With the above obtained pre-processed traffic pattern results employing Local-Global Invariant Inter Quartile and Min-Max Normalization based Traffic Data Pre-processing and predicting traffic based on these results in turn not only aid in reducing training time but also root mean square error considerably. Following which spatial and temporal features were obtained by using a Gaussian Kernel Dynamic Adjacency based Spatial Correlated and Temporal Time-dependency based feature extraction model. The results are listed as given below in Fig. 11.

Results of spatial and temporal feature extraction.
From the above results along with the general feature date, two spatial features, area code and road/intersection name along with three temporal features average speed, congestion level and traffic volume were returned for traffic prediction. With the above features extracted efficient traffic prediction is ensured. The quantitative analysis of traffic prediction employing the GDAG-SCTT method is detailed in the following sub-sections.
Experimental setup and discussion
The proposed traffic prediction for Bangalore city using Bangalore’s traffic pulse samples called, Gaussian Dual Adjacency Graph-based Spatial Correlated and Temporal Time-dependent (GDAG-SCTT) experimental model is evaluated employing Python working on MS Window platform on computer with i3-2350 processor and 2 GB RAM and the results are compared with the previous three existing methods, Layered Training Graph Convolutional Network (LT-GCN)1, Traffexplainer2and STGCN3.Moreover, the results are analyzed and validated on the basis of five metrics, such as, precision, recall, accuracy, root mean square error and training time using Bangalore’s traffic pulse dataset obtained from https://www.kaggle.com/datasets/preethamgouda/banglore-city-traffic-dataset/data. In addition, for evaluation, the maximum number of samples is taken as 8000. Also to ensure fair comparison between the performance of the GDAG-SCTT method with the other competing methods, Layered Training Graph Convolutional Network (LT-GCN)1, Traffexplainer2 and STGCN3 same samples from the above mentioned dataset are employed. Table 3 given below lists the Python libraries and versions along with the detailed hyper parameter settings, training procedures, convergence criteria in addition to the hardware specifications.
K-fold cross-validation is used for splitting the entire dataset into train/test/validation. To ensure randomness is ensured the dataset employed in our work is initially shuffled. Following this the shuffled data is then split into K equally sized samples. For the first iteration, a single fold is utilized as the test set whereas the remaining K-1 folds are utilized for training. Next, the method’s performance is then estimated on the test fold and accordingly the performance metrics are recorded by predicting traffic. Finally, the process is repeated K times with a distinct fold as the test set in each iteration.
Performance analysis of root mean square error
Root Mean Square Error (RMSE) is a performance metric utilized in assessing the predictive methods’ accuracy required for traffic prediction. RMSE evaluates the average magnitude of errors between predicted ‘\(\:Pred\)’ and actual ‘\(\:Act\)’ values. A lower RMSE represents a method that ensures more accurate predictions, while a higher RMSE puts forward less accurate traffic predictions. RMSE is mathematically formulated as given below.
From the above Eq. (21) the root mean square error ‘\(\:RMSE\)’ results are arrived at based on the traffic predicted results ‘\(\:{Pred}_{i}\)’ and the actual traffic results ‘\(\:{Act}_{i}\)’ with respect to the samples ‘\(\:m\)’ provided as input. It is measured in terms of percentage (%). Table 4 denotes the overall analysis of the root mean square error using proposed GDAG-SCTT and existing methods, LT-GCN1, Traffexplainer2, STCGN3 versus different traffic pattern samples taken as input. Among three different existing methods, the proposed GDAG-SCTT method reduced the RMSE with accurate traffic prediction.

Comparison of root mean square error using GDAG-SCTT and LT-GCN [1], Traffexplainer [2], STGCN [3].
Figure 12 given above shows the relative assessment of Root Mean Square Error (RMSE) by taking into consideration different traffic samples as input. On the basis of different traffic patterns obtained from different traffic date provided in the horizontal direction, the RMSE results are obtained at the vertical direction. From the figure, it is clearly shown that the proposed GDAG-SCTT method improves the performance results of the RMSE. This improvement is achieved by removing the outliers from the original traffic patterns obtained from Bangalore’s traffic pulse dataset. Local-Global Invariant Inter Quartile and Min-Max Normalization is applied as pre-processing that employs fragment-aware local invariance and global invariance Inter Quartile function to remove outliers. Following this Kronecker Delta based One-Hot encoding function was applied to eliminate overfitting. Finally, the Min-Max normalization function was applied to the rest of the features that in turn notably influence the data quality. The pre-processed traffic patterns were then used for extracting spatial and temporal features that in turn minimized the RMSE. Totally ten results are obtained as shown in the above figure. Followed by which, the RMSE results of the proposed method are compared with the results obtained by the three existing methods1–3. The average comparison results confirm that the proposed GDAG-SCTT reduces the RMSE by 12% upon comparison to1, 16% upon comparison to2and 50% compared to3.
Performance analysis of training time
Training time refers to the time consumed in training a traffic prediction model. The training time is mathematically evaluated as given below.
From the above Eq. (22) the training time ‘\(\:TT\)’ for traffic prediction, is measured based on the samples considered for simulation purpose ‘\(\:{S}_{i}\)’ and the time consumed in predicting traffic ‘\(\:Time\:\left(Predn\right)\)’ via spatial and temporal features into consideration. It is measured in terms of seconds. Table 5 given below lists the training time analysis employing GDAG-SCTT, LT-GCN1, Traffexplainer2and STGCN3.

Comparison of training time using GDAG-SCTT and LT-GCN [1], Traffexplainer [2], STGCN [3].
Figure 13 given above shows the training time results of three different methods, GDAG-SCTT, LT-GCN[1], Traffexplainer[2] and STGCN[3] respectively. In the horizontal axis, 8000 different traffic patterns were used for simulation analysis and on the other hand in the vertical direction the training time involved in the overall analysis of traffic prediction was measured. A fair comparison was made using all four methods by applying similar traffic patterns and accordingly quantitative analysis was made. From the above graph the training time was observed to be increasing with the increase in the sample traffic patterns. However, simulation results found improvements when applied with the proposed GDAG-SCTT method upon comparison to[1–3].
By cleaning and preparing the data through Local-Global Invariant Inter Quartile and Min-Max Normalization based Traffic Data Pre-processing, training time incurred during the generation of inconsistent traffic patterns was eliminated, resulting in a more accurate RMSE and a better understanding of traffic prediction. Also by employing three different processes, fragment-aware local invariance and global invariance Inter Quartile function, the Kronecker Delta based One-Hot encoding function and Min-Max normalization significantly improve the data quality, therefore reducing the overall training time involved in traffic prediction. By addressing these issues, like, inconsistencies and outliers leads to more accurate model predictions and a lower training time. This in turn aids in minimizing the training time involved in traffic prediction using the proposed GDAG-SCTT method by 20% compared to1, 34% compared to2 and 46% compared to3 respectively.
Performance analysis of Precision, recall and accuracy
Precision also referred to as positive predictive value refers to the ratio of relevant traffic instances among the retrieved traffic instances. Precision is evaluated as given below.
From the above Eq. (23) precision ‘\(\:Pre\)’ is measured based on the true positive rate (i.e. Indra Nagar area detected as Indra Nagar area) ‘\(\:TP\)’ and false positive rate ‘\(\:FP\)’ (i.e. Indra Nagar area detected as Whitefield) respectively. Recall also referred to as sensitivity denotes the ratio of relevant traffic instances that were retrieved. Recall is calculated as given below.
From the above Eq. (24), recall ‘\(\:Rec\)’ is measured based on the true positive rate ‘\(\:TP\)’ (i.e. Indra Nagar area detected as Indra Nagar area) and false negative rate ‘\(\:FN\)’ (i.e. Whitefield area as Indra Nagar) respectively. Finally, the accuracy rate involved in traffic prediction is measured as given below.
From the above Eq. (25) accuracy rate ‘\(\:Acc\)’ is measured based on the true positive rate ‘\(\:TP\)’ (i.e. Indra Nagar area detected as Indra Nagar area), true negative rate ‘\(\:TN\)’ (i.e. Whitefield area as Whitefield), false positive rate ‘\(\:FP\)’ (i.e. Indra Nagar area detected as Whitefield) and false negative rate ‘\(\:FN\)’ (i.e. Whitefield area as Indra Nagar) respectively. Table 6 given below provides the precision, recall and accuracy analysis using the proposed GDAG-SCTT and existing methods, LT-GCN1, Traffexplainer2 and STGCN3.

Comparison of precision using GDAG-SCTT and LT-GCN [1], Traffexplainer [2], STGCN [3].

Comparison of recall using GDAG-SCTT and LT-GCN [1], Traffexplainer [2], STGCN [3].

Comparison of accuracy using GDAG-SCTT and LT-GCN [1], Traffexplainer [2], STGCN [3].
Figures 14, 15 and 16 given above illustrates the precision, recall and accuracy rate using the three methods, GDAG-SCTT, LT-GCN[1], Traffexplainer [2] and STGCN[3]. To ensure fair comparison between the proposed GDAG-SCTT and three existing methods[1–3] three methods 8000 sample traffic patterns were analyzed and accordingly validated the three performance metrics, precision, recall and accuracy.
From the above figure it is inferred that the precision, recall and accurate results neither increased nor decreased with the increase in the sample traffic pattern size. Nevertheless, comparative analysis between the three methods proved better results using the GDAG-SCTT method upon comparison to[1–3]. This is confirmed from the simulation results for 800 sample traffic patterns where the precision rate using the proposed GDAG-SCTT method was found to be 0.98 whereas using1 it was observed to be 0.98, using[2] was found to be 0.97 and using[3] was found to be 0.97. Similarly, the proposed GDAG-SCTT method’s recall rate was found to be 0.99 whereas 0.98 when applied with1,2 and 0.97 with3. Finally, the accuracy rate was found to be 0.97 using the proposed GDAG-SCTT method whereas 0.96 when applied with[1–2] and 0.95 using[3] respectively. This result corroborates the enhancement in three distinct performance metrics, precision, recall and accuracy using the proposed method.
The reason behind the improvement of three performance metrics with the proposed method was owing to the application of Gaussian Kernel Dynamic Adjacent Spatial Correlated and Temporal Time-dependency based feature extraction for traffic prediction. By applying this algorithm dynamic adjacent matrix was used instead of traditional adjacent matrix where both vertices and edges were grouped while performing the process of traffic prediction. Using this dynamic adjacent matrix along with the Spatial Correlated Graph Convolutional Neural Network assists in retrieving relevant spatial features, therefore improving overall precision and recall.
This Spatial Correlated Graph Convolutional Neural Network based result assisted in boosting the precision rate of the proposed GDAG-SCTT method by 6%, 15% and 13% compared to[1–3], improving overall recall by 10% compared to[1], 13% compared to[2] and 16% compared to[3]. Also using Temporal Long Short Term Time-dependency Memory, along with LeakyReLU activation function aids in making certain non-linearity required to obtain complex relationships are obtained. Also with the aid of correlation analysis assists in identifying dependencies between different areas and time periods, resulting in more accurate traffic predictions. Finally, by employing a fully connected layer both spatial and temporal features were employed for traffic prediction which in turn improved the overall accuracy of the proposed GDAG-SCTT by 8% upon comparison to1, 17% upon comparison to2 and 19% upon comparison to[3] respectively.
Conclusion
Accurate traffic predictions can assist drivers in selecting the fastest routes, enhance public safety by scheduling operations optimally and reduce congestion by forecasting future traffic conditions. In this work a robust traffic prediction method to better manage traffic flow employing a Gaussian Dual Adjacency Graph-based Spatial Correlated and Temporal Time-dependent (GDAG-SCTT) is proposed. The preprocessing section being analytical and is straight forward using outlier removal and minimizing overfitting via Local-Global Invariant Inter Quartile and Min-Max Normalization based Pre-processing aids in improving the training time and RMSE significantly. Obtained pre-processed results are fed into the Gaussian Kernel Dynamic Adjacent Spatial Correlated and Temporal Time-dependency based feature extraction model for accurate traffic prediction. Here two processes, i.e., spatial feature extraction and temporal feature extraction and finally applying fully-connected layer for traffic prediction were designed. Finally, with the aid of the results learnt in the feature extraction process, the traffic prediction results were obtained in a precise and accurate manner. The quantitative analysis and validation confirm that the proposed GDAG-SCTT method was better than state-of-the-art methods, in terms of RMSE, training time, precision, recall and accuracy. The results show that the proposed GDAG-S method is comparatively better than other methods. Since the traffic flow data is affected by road network topology, ramps, traffic signals and other factors, the influence of these factors on traffic flow data will be further studied so as to improve the prediction accuracy. Furthermore, to boost the comprehensiveness and systematic nature of the study, it is recommended that data be collected from other cities to create a more robust dataset.
Data availability
The Bangalore’s traffic pulse dataset that support the findings of this study are publicly available on Kaggle at the following link [https://www.kaggle.com/datasets/preethamgouda/banglore-city-traffic-dataset/data](https:/www.kaggle.com/datasets/preethamgouda/banglore-city-traffic-dataset/data). As noted above, all data used in the experiments are open source and publicly accessible from the corresponding hyperlinks.
References
Andyangsu, Y. L. A network traffic prediction model based on layered training graph convolutional network. IEEE Access. https://doi.org/10.1109/access.2025.3538265 (2025).
Lingbai Kong, H. Y. J. et al. Traffexplainer: a framework toward gnn-based interpretable traffic prediction. IEEE Trans. Artif. Intell. 6(3), 559–573 (2024).
Shimon Komarovsky, J. Spatio-temporal graph convolutional neural network for traffic signal prediction in large-scale urban networks. Transp. Res. Interdisciplinary Perspect. https://doi.org/10.1016/j.trip.2025.101482 (2025).
Mike Pereira, A. & Langa, B. Short-term traffic prediction using physics-aware neural networks Vol. 142, 103772 (Transportation Research Part C, Elsevier, 2022).
Pegnan Chi, X. & Ma Short-term Traffic Prediction on Swedish Highways: A Deep Learning Approach with Knowledge Representation, IFAC Conference Paper Archive, Elsevier, Vol. 56, Sep (2023).
Fouzi Harrou, A., Zeroual, F. & Kadri, Y. Enhancing road traffic flow prediction with improved deep learning using wavelet transforms. Results Eng. Elsevier 23, 102342 (2024).
Qitan Shao, X. et al. An adaptive composite time series forecasting model for short-term traffic flow 102 (Journal of Big Data, 2024).
Haiqiang Yang, Z. & Li, Y. Predicting traffic propagation flow in urban road network with multi-graph convolutional network. In Complex Int. Syst. Vol. 10 23–35 (Springer, 2023).
Bernardo & Gomesa José Coelhoa,b, Helena Aidos, A survey on traffic flow prediction and classification, Intelligent Systems with Applications, Elsevier, Vol. 20, Nov (2023).
Panagiotis Fafoutellis, E. I. Unlocking the Full Potential of Deep Learning in Traffic Forecasting Through Road Network Representations 23 (A Critical Review, Data Science for Transportation, 2023).
Sayed, A., Sayed, Y. & Abdel-Hamid, H. A. Hefny Artificial intelligence-based traffic flow prediction: a comprehensive review. J. Electrical Syst. Inform. Technol. 10(1), 13 (2023).
Do,Mostafa, A. K. D. T., Fouda,Abdulaziz, M. & Almaleh, A. U. Short-term traffic prediction using deep learning long short-term memory: taxonomy, applications, challenges, and future trends. IEEE Access. 11, 94371–94391 (2023).
Chughtai, N. Z. & Muneeb, J. U. R. M. Traffic prediction in smart cities based on hybrid feature space. IEEE Access 10, 134333–134348 (2022).
Singh, V., Sahana, S. K. & Bhattacharjee, V. A Novel CNN-GRU-LSTM Based Deep Learning Model for Accurate Traffic Prediction (Discover Computing, Mar 2025).
Nevin Cini, Z. et al. A deep ensemble approach for long-term traffic flow prediction, Arabian. J. Sci. Enginee. 49(9), 12377–12392 (2024).
Li, S., Chen, Y. T., Liu, A., Li, C. & Yang, X. Traffic flow prediction based on spatial-temporal multi factor fusion graph convolutional networks12612 (Scientific Reports, 2025).
Peng, L., Liao, X., Li, T., Guo, X. & Wang, X. An overview based on the overall architecture of traffic forecasting 341–359 (Data Science and Engineering, 2024).
Xiexin Zou, E., Chung, H. & Ye, H. Deep learning for traffic prediction and trend deviation identification: a case study in Hong Kong Vol. 6, 27 (Springer, 2024).
Brahim Remmouche, D., Boukraa, A., Zakharova, T., Bouwmans, M. & Taffar Long-Term Spatio-Temporal Graph Attention Network for Traffic Forecasting (Expert Systems With Applications, May 2025).
Li, L. & Kyungbaekkim, S. T. E. N. T. P. Feb : A Long-Short period aware network traffic prediction model. IEEE Access., 13, (2025).
Yin, X., Yu, J., Duan, X., Chen, L. & Liang, X. Short-term urban traffic forecasting in smart cities: a dynamic diffusion spatial-temporal graph convolutional network. In Complex Intell. Syst. Vol. 11 158 (Springer, 2025).
Zhang, X., FangweiLi, Q. R. & YingZhang, C. Expressway traffic flow prediction based on MF-TANandSTSA e0297296 (ShuangGuo, 2024).
Yang Cao, D., Liu, Q., Yin, F. & Xue, H. Multi-head self-attention spatiotemporal graph convolutional network for traffic flow forecasting,. J. Adv. Transportation 2022, 2811961 (2022).
o Yu, B., Yin, H. & Zhu, Z. Spatio-temporal graph convolutional networks: A deep learning framework for traffic forecasting, International Joint Conference on Artificial Intelligence, Oct (2017).
o Pan, Y. A. et al. A fundamental diagram based hybrid framework for traffic flow estimation and prediction by combining a Markovian model with deep learning. Expert Syst. applications 238, 122219 (2024).
o Pan, Y. A., Li, F., Li, A., Niu, Z. & Liu, Z. Urban intersection traffic flow prediction: a physics-guided stepwise framework utilizing spatio-temporal graph neural network algorithms. Multimodal Transp. 4(2), 100207 (2025).
o Li, W., Chen, Y. & Pan, Y. Urban signalized intersection traffic state prediction: a spatial-temporal graph model integrating the cell transmission model and transformer (applied sciences, MDPI, Feb 2025).
Xu, J. et al. A heterogeneous two-layer graph convolution model for turning traffic prediction with missing data 2497941 (Taylor and Francis, 2025).
Xu, J., Li, X., Lu, W., Rakotonirainy, A. & Li, Y. A trajectory-conditional generative adversarial network model for missing vehicle trajectory imputation, Physica A: Statistical Mechanics and its Applications, Elsevier, Vol. 676, Oct (2025).
Author information
Authors and Affiliations
Contributions
Sathish Kumar Ravichandran: Led the overall idea and design of the traffic prediction system research.Chin-Shiuh Shieh: Helped with background research and picking the right Machine learning methods.Mong-Fong Horng: Worked on getting the data ready, making the graph model and training the prediction model.Arulmurugan Ramu: Concentrated on experiments, analysing the results and making model more accurate.Archana Sasi: Edited the paper and coordinated the final submission process.
Corresponding author
Ethics declarations
Competing interests
The authors declare no competing interests.
Additional information
Publisher’s note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution-NonCommercial-NoDerivatives 4.0 International License, which permits any non-commercial use, sharing, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if you modified the licensed material. You do not have permission under this licence to share adapted material derived from this article or parts of it. The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by-nc-nd/4.0/.
About this article

Cite this article
Ravichandran, S., Shieh, CS., Horng, MF. et al. Gaussian dual adjacency graph based spatial correlated and temporal time dependent traffic prediction in Bangalore City. Sci Rep 15, 41208 (2025). https://doi.org/10.1038/s41598-025-25075-4
Received:
Accepted:
Published:
Version of record:
DOI: https://doi.org/10.1038/s41598-025-25075-4
