
Abstract
In recent years, discovering and examining novel soliton solutions to nonlinear models that emerge in the disciplines of science and engineering have received noticeable fascination from researchers, as these solutions shed light on the models’ underlying phenomena. This study goals to establish and evaluate new plethora of soliton solutions in the context of (2+1)-dimensional Modified Zakharov-Kuznetsov Equation (MZKE), which arises in electrical engineering, using a novel analytical tool called the Riccati Modified Extended Simple Equation Method (RMESEM). A mathematical framework for MZKE is first modelled by applying Kirchhoff’s law to the nonlinear electrical transmission line circuit. The suggested anstaz RMESEM then generates nonlinear ordinary differential equation (NODE) from the model using a sophisticated wave transformation. To find a new variety of soliton solutions, the resultant NODE is assumed to have a closed form solution that transforms it into a system of nonlinear algebraic equations by substitution. Solving the resultant system using maple yields novel families of soliton solutions for the aimed MZKE in the form of rational, hyperbolic, trigonometric, rational-hyperbolic and exponential functions. Graphical representations of the wave behavior of different soliton solutions are provided by three-dimensional, contour, and two-dimensional graphs. These graphs reveal that the found solitons significantly display the profiles of kink solitons, including bell-shaped, lump-like, twinning, and perturbed kinks. The obtained results contribute to a deeper understanding of the model and its potential applications in related domains by providing useful insights into the dynamics and behavior of the MZKE. Significantly, the results obtained also demonstrate that the proposed transformation-based RMESEM offers a straightforward and trustworthy strategy for exploring soliton phenomena in a wide range of nonlinear equations.
Similar content being viewed by others
Introduction
Partial Differential Equations (PDEs) have a crucial role in mathematics and its numerous applications, as demonstrated by the scientific revolution sparked by Isaac Newton’s calculus. In particular, Nonlinear PDEs (NPDEs) have been used to model many important physical phenomena including Maxwell equation in electromagnetism1, Schrödinger equation in quantum mechanics2, Navier–Stokes, Euler and Kadomstev-Petviashvili equations in fluid mechanics3,4,5, Eikonal equation and Maxwell–Bloch equations in optics6,7, Vlasov equation in plasmas8, Ginzburg–Landau equation in superconductivity9, Lamé and von Karman equations in elasticity10,11, FitzHugh-Nagumo equation in neuroscience12, Black-Scholes equation in finance13, Kolmogorov–Petrovsky-Piskounov in chemical reactions14, Korteweg-de Vries (KdV)equation and modified KdV equation15,16, stochastic KdV equation17 and many more18,19,20. The problem is that, although their derivation as physical models such as classical, quantum, and relativistic etc. are generally well-established, the majority of the resulting PDEs are infamously challenging to solve, and only a select few can be considered fully understood. Many times, the creation of so-called sophisticated numerical approximation schemes–a significant and ongoing field in and of itself–is the only way to compute and comprehend their solutions21,22,23. The analytical and numerical approaches to the subject are closely related since one cannot advance much on their numerical aspects without having a thorough understanding of the underlying analytical features.
Since soliton theories offers significant new insights into the nuances of nonlinear models, accurate solutions of NPDEs—particularly the computing of travelling wave and soliton solutions—are crucial to the research and application of soliton theory in mathematical physics and engineering. Many useful techniques have been created to get soliton solutions for comprehending how these nonlinear models physically operate, which will aid engineers and various other professionals as well as assist them learn more regarding physical issues and their potential uses. Using symbolic computer programmes like Matlab, Maple, Mathematica, and others that simplify difficult algebraic computations, there has been a growing interest in offering accurate soliton solutions for NPDEs in recent years. Several analytical techniques to find novel soliton solutions may be discovered in the literature, including Sine-Gordon method24, Riccati-Bernoulli Sub-ODE method25, Khater method26, \((G'/G)\) -expansion method27,28,29,30, sub-equation method31, exp-function method32, Sardar sub-equation method33, Poincaré–Lighthill–Kuo method34, Extended Direct Algebraic Method (EDAM)35,36,37,38,39,40, Hirota’s bilinear method41, Kudryashov method42, generalized exponential rational function method43,44,45, generalized Riccati equation mapping method46, improved F-expansion approach47, extended modified auxiliary equation mapping method48, Kumar-Malik method49 among others.
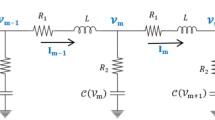
The goal of the current study is to present RMESEM and the Hamiltonian system in order to get soliton solutions for the MZKE discrete nonlinear transmission line problem. The formation of weakly nonlinear ion-acoustic waves inside plasma with hot isothermal electrons as well as cold ions in the midst of a uniform magnetic field in the x-direction is one of the many phenomena that this model sheds light on50,51,52. It is possible to utilise this particular model to explain a wide range of technological, mechanical, and physical processes. As an example system for investigating nonlinear excitations, electrical transmission lines, as seen in Figure 1, exhibit nonlinear behaviour within nonlinear media.

Representation of nonlinear electrical transmission line.
Mathematical modelling of MZKE
The nonlinear electrical transmission line’s construction relies on either periodic loading of the var-actors or the arrangement of inductors and var-actors in a one-dimensional lattice. This model consists of a dispersive transmission line and a nonlinear network with several nonlinear LC couplings. As seen in Fig. 1, each line in the shunt branch has a nonlinear capacitor with capacitance \(C(\phi _p,q)\) and a conductor L. At each node, there are many dispersive lines that are identical and connected by capacitance \(C_s\). Duan developed the MZKE by applying the Kirchhoff law to the model. The discrete nonlinear transmission is represented mathematically in fractional form as follows53:
The voltage is represented by \(\phi _{q,p}\), a function of S, and the nonlinear charge may be computed as follows:
where the unknown invariables \(\beta _1\) and \(\beta _2\) are. Adding (2) to (1) results in:
replacing \(\phi _{p,q}(S)=\phi (S,p,q)\) yields
Reductive perturbation theory allows for the reduction of (4) to the subsequent model:
where
Before this study, several previous studies used various methods to address the targeted MZKE. For instance, Yu et al. used a Duffing-type equation as simplest auxiliary equation to study exact traveling wave solutions of the Zakharov-Kuznetsov Equation (ZKE), MZKE and their generalized forms using a version of the simplest equation method54. In another study, Ray and Sahoo constructed some analytical exact solutions of fractional ZKE and MZKE in Jumarie’ modified Riemann-Liouville sense by using fractional sub-equation method55. Raut et al. in56 investigated the generalized forms of ZKE and MZKE in the presence of external periodic forcing term together with damping. An array of approximate analytical solutions such as rare effective soliton, positive amplitude soliton, kink type soliton, periodic rational soliton, etc. is obtained by employing the direct assumption technique. Finally, the modified (G’/G)-expansion method has been applied by Islam et al. to seek novel computational results for MZKE in electrical engineering57. Nevertheless, the generation of solitary and twinning kink soliton solutions has not been examined and assessed in the context of the desired model utilizing RMESEM. This claim draws attention to a significant void in the corpus of existing literature. By providing a comprehensive model analysis and describing the recommended RMESEM methodology, our study closes this gap. We introduce RMESEM, which is a unique and useful method among the many analytical approaches. This approach is a modified version of the Modified Simple Equation Method (MSEM)58, which combines the well-known Riccati Nonlinear Ordinary Differential Equation (NODE) with MESEM. RMESEM effectively handles MZKE by converting it into more manageable NODE. For the resulting NODE, a closed form solution using Riccati-NODE is expected, which reduces the NODE into a set of algebraic equations. New families of soliton solutions for the desired MZKE are produced by using Maple to solve the resulting system. These solutions take the form of exponential, rational, hyperbolic, trigonometric, and rational-hyperbolic functions. Three-dimensional, contour, and two-dimensional graphs are used to graphically depict the wave behavior of various soliton solutions. The profiles of kink solitons, such as bell-shaped, lump-like, twinning, and perturbed kinks, are notably displayed by the discovered solitons, according to these graphs. By offering valuable insights into the dynamics and behavior of the MZKE, the acquired results advance our knowledge of the model and its possible applications in related fields.
The other sections of the paper are organised as follows: In “The description of RMESEM”, the RMESEM’s research approach is briefly explained. “Establishing kink soliton solutions for MZKE” presents the developed kink soliton solutions. In “Discussion and graphs”, we present the propagating dynamics of a few kink solitons visually and discuss them in great detail. We conclude our investigation in “Conclusion”.
The description of RMESEM
The literature has established a wide range of analytical methods to study soliton occurrences in nonlinear models59,60,61,62,63. In this part, we describe the operation mechanism of the improved RMESEM. Examining the ensuing general NPDE:
where \({\psi }={\psi }(t,w_1,w_2,w_3,\ldots ,w_r)\).
The following steps will be taken in order to solve Eq. (7):
-
1.
The variable-form wave transformation \({\psi }(t,w_1,w_2,w_3,\dots ,w_r)={\Psi }(\varsigma )\) is first carried out. There are several ways to represent \(\varsigma\). In this approach, Eq. (7) is modified to obtain the following NODE:
$$\begin{aligned} Q({\Psi },{\Psi }'{\Psi },{\Psi }',\dots )=0, \end{aligned}$$(8)where \({\Psi }'=\frac{d {\Psi }}{d\varsigma }\). On occasion, the NODE may be made to comply with the homogeneous balance requirement by using integrating Eq. (8).
-
2.
The solution of the extended Riccati-NODE is then used to propose the series-based solution for the NODE in (8):
$$\begin{aligned} {\Psi }(\varsigma )=\sum _{{m}=0}^{{\kappa }}\omega _{m} \left( \frac{\zeta '(\varsigma )}{\zeta (\varsigma )}\right) ^{m}+ \sum _{{{m}}=0}^{{\kappa }-1}\delta _{{m}} \left( \frac{\zeta '(\varsigma )}{\zeta (\varsigma )}\right) ^{{m}} \cdot \left( \frac{1}{\zeta (\varsigma )} \right) . \end{aligned}$$(9)Here, the solution to the resultant extended Riccati-NODE is denoted by \(\zeta (\varsigma )\), and the unknown constants that need to be found later are represented by the variables \(\omega _{m} ({m}=0,...,{\kappa })\) and \(\delta _{{m}} ({{m}}=0,...,{\kappa }-1)\).
$$\begin{aligned} \zeta '(\varsigma )={\lambda }+{\mu } \zeta (\varsigma )+{\nu }(\zeta (\varsigma ))^2, \end{aligned}$$(10)where \({\lambda },{\mu }\) and \({\nu }\) are constants.
-
3.
The positive integer \({\kappa }\) needed in Eq. (9) may be obtained by homogeneously balancing the highest-order derivative and the biggest nonlinear component in Eq. (8).
-
4.
Then, all the components of \(\zeta (\varsigma )\) are combined into an equal ordering when (9) is integrated into (8) or the equation that emerges from the integration of (8). When this process is used, an expression in terms of \(\zeta (\varsigma )\) is generated. By setting the coefficients in this equation to zero, we obtain an algebraic system of equations defining the variables \(\omega _{m} ({m}=0,...,{\kappa })\) and \(\delta _{{m}} ({{m}}=0,...,{\kappa }-1)\) with other related parameters.
-
5.
Using Maple, an analytical assessment of a set of nonlinear algebraic equations is carried out.
-
6.
Analytical soliton solutions for (7) are then produced by computing and entering the unknown values together with \(\zeta (\varsigma )\) (the Eq. (10) answers) in Eq. (9). Using the generic solution of (10), we may get several families of soliton solutions, which are displayed as follows:
Where \({w_1}, {w_2} \in \textrm{R}\), \({S} ={\mu }^2-4{\nu } {\lambda }\) and \(\wp =\cosh \left( \frac{1}{4}\,\sqrt{{S}}\varsigma \right) \sinh \left( \frac{1}{4}\,\sqrt{{S}}\varsigma \right)\). The table 1, family constraint(s) of \(\zeta (\varsigma )\) and \(\bigg (\frac{\zeta '(\varsigma )}{\zeta (\varsigma )}\bigg )\).
Establishing kink soliton solutions for MZKE
This section focuses on using RMESEM to explore the soliton solution for the model that is provided and given in (5). The wave transformation that we begin with is as follows:
which turn (5) into a NODE; if the acquired ODE is integrated, the following is achieved:
where the constant of integration is C. After applying homogeneous balance to \(\Psi ^3\) and \(\Psi ''\) present in (12), we obtain \(\kappa =1\), which is the balance number \(\kappa\) present in (9). Closed form solution for (12) proposes the following when \(\kappa =1\) is entered in (9):
An expression in \(\zeta (\varsigma )\) can be obtained by inserting (13) into (12) and gathering all words with the same powers of \(\zeta (\varsigma )\). An equation system of nonlinear equations is produced by equating the coefficients to zero. After using Maple to solve the resulting problem, we obtain the following three sets of solutions:
Case 1:
Case 2:
Case 3:
Taking Case 1, we obtain the subsequent sets of kink soliton solutions for MZKE given in (5) through the use of (11), (13), and the equivalent solution of (10):
Family 1.1: When \({S}<0 \quad \nu \ne 0\),
and
Family 1.2: When \({S}>0 \quad \nu \ne 0\),
and
Family 1.3: When \({S}=0, \quad \mu \ne 0\),
Family 1.4: When \({S}=0\), in case when \(\mu =\nu =0\),
Family 1.6: When \(\mu =\chi\), \(\lambda =n\chi (n\ne 0)\) and \(\nu =0\),
In above families of solutions,
Taking Case 2, we obtain the subsequent sets of kink soliton solutions for MZKE given in (5) through the use of (11), (13), and the equivalent solution of (10):
Family 2.1: When \({S}<0 \quad \nu \ne 0\),
and
Family 2.2: When \({S}>0 \quad \nu \ne 0\),
and
Family 2.3: When \({S}=0, \quad \mu \ne 0\),
Family 2.4: When \({S}=0\), in case when \(\mu =\nu =0\),
Family 2.5: When \({S}=0\), in case when \(\mu =\lambda =0\),
Family 2.6: When \(\mu =\chi\), \(\lambda =n\chi (n\ne 0)\) and \(\nu =0\),
Family 2.7: When \(\mu =\chi\), \(\nu =n\chi (n\ne 0)\) and \(\lambda =0\),
Family 2.8: When \(\lambda =0\), \(\nu \ne 0\) and \(\mu \ne 0\),
and
In above families of solutions,
Taking Case 3, we obtain the subsequent sets of kink soliton solutions for MZKE given in (5) through the use of (11), (13), and the equivalent solution of (10):
Family 3.1: When \({S}<0 \quad \nu \ne 0\),
and
Family 3.2: When \({S}>0 \quad \nu \ne 0\),
and
Family 3.3: When \({S}=0, \quad \mu \ne 0\),
Family 3.4: When \({S}=0\), in case when \(\mu =\lambda =0\),
Family 3.5: When \(\mu =\chi\), \(\nu =n\chi (n\ne 0)\) and \(\lambda =0\),
Family 3.6: When \(\lambda =0\), \(\nu \ne 0\) and \(\mu \ne 0\),
and
In above families of solutions,
Discussion and graphs
The RMESEM method was successfully applied in the study, which resulted in the creation of novel families of soliton solutions for the MZKE. The results of the study provide important insights into the behavior of the MZKE and also help us better understand the dynamics of the model. The results also provide resources for further research and analysis and demonstrate how RMESEM may be used to solve challenging NPDEs. The relation between different soliton types, propagation patterns, and interactions is visually shown using a combination of 2-D, 3-D, and contour plots. This graphical analysis highlights the significance of our findings and demonstrates the effectiveness of the RMESEM approach in interpreting complex nonlinear systems. The results of this investigation are groundbreaking since this method’s application to the MZKE is new in the literature. Because RMESEM is a straightforward algebraic ansatz and does not necessitate intricate processes like linearization, perturbation, and other transformation techniques–which are occasionally required in other methods–we specifically picked it. Because of RMESEM’s ease of use and efficiency, we may obtain precise closed-form answers without the hassles of more complex techniques. One of the main features of RMESEM is its capacity to provide a large number of solution families, including exponential, rational, hyperbolic, and trigonometric functions. By exposing a wide variety of wave properties that other approaches might miss or be unable to capture, this variation makes it possible to conduct a more thorough investigation of the model. Unlike more traditional approaches, RMESEM provides a range of solution forms, enabling a more thorough and in-depth comprehension of the dynamics present in the model being studied. However, it should be noted that if the highest derivative terms and the largest nonlinear component do not balance homogeneously, the proposed method is ineffective. In this case, soliton creation is impossible since the approach cannot balance the nonlinearity with dispersion. Notwithstanding this drawback, the current study indicates that the approach is precise and trustworthy for dealing with nonlinear issues across a variety of scientific fields.
Kink solitons, which are present in the solutions, are prominently exhibited by the discovered solitons. These features, which are essential to the physical fields that the MZKE describes, include bell-shaped, lump-like, twinning, and perturbed kinks. A solitary kink happens when a single, independent wave maintains its shape while moving; this is a common occurrence in signal transmission, when signal integrity is crucial. A lump-like kink is a localized bump-like protrusion used to mimic discrete energy packets in fiber optic or nonlinear transmission lines. It is a confined disruption in the medium of transmission. A bell-like kink wave is one that gently moves between one eschatological condition to a different one, much like a curve that is bell-shaped. These waves may be very useful in explaining the slow change in electrostatic field strength as well as plasma concentration. Kinks that have minor changes or disruptions, known as perturb kinks, are commonly used to simulate the implications of outside factors or flaws in the substrate, such as fluctuations in electronic circuits. The interaction involving coupled perturbations in plasma systems or linked nonlinear synthesisers is represented by twinning kinks, which are two closely connected kinks traveling alongside each other. Regarding the balance, propagation, and control of waves in electronics-related domains, each of these soliton helps us better understand the complex behaviors and relationships in structures as described by MZKE. Below are several graphs that are shown and discussed:
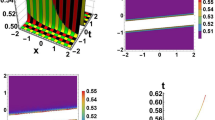
Figure 2, the 3D, contour and 2D (when \(y=10\)) graphs for the solitary kink soliton solution \(\psi _{1, 5 }\) stated in (21), are plotted for \(\lambda := 4, \mu := 5, \nu := 1, \varrho := 0.2E^{-2}, C:= 0.1E^{-2}, t:= 0, \omega _{0}:= 1, \delta _{0}:= 2, k_{1}:= 1.5\). Fig. 3, the 3D, contour and 2D (when \(y= 0\)) graphs for the perturbed lump-type kink soliton solution \(\psi _{1, 8 }\) stated in (24), are plotted for \(\lambda := 8, \mu := 10, \nu := 2, \varrho := 0.20E^{-1}, C:= 1, t:= 1, \omega _{0}:= 4, \delta _{0}:= 3, k_{1}:= 1\). Fig. 4, the 3D, contour and 2D (when \(x= 1\)) graphs for the lump-type kink soliton solution \(\psi _{1, 9 }\) stated in (25), are plotted for \(\lambda := 1, \mu := 4, \nu := 4, \varrho := 0.50E^{-1}, C:= 0.5, t:= 5, \omega _{0}:= 0.5, \delta _{0}:= 5, k_{1}:= 2\). Fig. 5, the 3D, contour and 2D (when \(y=0\)) graphs for the twinning kink soliton solution \(\psi _{2, 4 }\) stated in (31), are plotted for \(\lambda := 1, \mu := 0, \nu := 1, \varrho := 0.75E^{-1}, C:= 0.15, t:= 10, \omega _{0}:= 0.5E^{-1}, \omega _{1}:= 1, k_{1}:= 3\). Fig. 6, the 3D, contour and 2D (when \(x= 100\)) graphs for the bell-shaped kink soliton solution \(\psi _{2, 5 }\) stated in (32), are plotted for \(\lambda := 2, \mu := 5, \nu := 2, \varrho := 0.3E^{-1}, C:= 0.7E^{-2}, t:= 20, \omega _{0}:= 0.1, \omega _{1}:= 1, k_{1}:= 5\). Fig. 7, the 3D, contour and 2D (when \(x= 1\)) graphs for the twinning kink soliton solution \(\psi _{2, 8 }\) stated in (35), are plotted for \(\lambda := 3, \mu := 13, \nu := 12, \varrho := 0.6E^{-1}, C:= 0.51E^{-2}, t:= 30, \omega _{0}:= 1, \omega _{1}:= 5, k_{1}:= 10\). Fig. 8, the 3D, contour and 2D (when \(x= 100\)) graphs for the solitary kink soliton solution \(\psi _{2, 14 }\) stated in (41), are plotted for \(\lambda := 0, \mu := 1, \nu := 2, \varrho := 0.8E^{-2}, C:= 0.24E^{-2}, t:= 25, \omega _{0}:= 3, \omega _{1}:= 2, k_{1}:= 1, w_{2}:= 6\). Fig.9, the 3D, contour and 2D (when \(x=1000\)) graphs for the multiple kink soliton solution \(\psi _{3, 3 }\) stated in (45), are plotted for \(\lambda := 1, \mu := 1, \nu := 1, \varrho := 0.45E^{-2}, C:= 0.27E^{-2}, t:= 3, \omega _{0}:= 1, \omega _{1}:= 5, k_{1}:= 10\). This graph also shows axial perturbation. Fig. 10, the 3D, contour and 2D (when \(x=10\)) graphs for the solitary kink soliton solution \(\psi _{3, 5 }\) stated in (47), are plotted for \(\lambda := 8, \mu := 10, \nu := 2, \varrho := 1, C:= 2, t:= 5, \omega _{0}:= 10, \omega _{1}:= 5, k_{1}:= 20\). Fig. 11, the 3D, contour and 2D (when \(x=100\)) graphs for the perturbed lump-type kink soliton solution \(\psi _{3, 11 }\) stated in (53), are plotted for \(\lambda := 0, \mu := 5,\) \(\nu := 15, \varrho := 0.1,\) \(C:= 0.35, t:= 100, \omega _{0}:= 4,\) \(\omega _{1}:= 2, k_{1}:= 12,\) \(\tau := 5, n:= 3\).

The 3D, contour and 2D (when y = 10) graphs for the solitary kink soliton solution \(\psi _{1, 5 }\) stated in (21), are plotted for \(\lambda := 4, \mu := 5, \nu := 1, \varrho := 0.2E^{-2},\) \(C:= 0.1E^{-2}, t:= 0, \omega _{0}:= 1, \delta _{0}:= 2, k_{1}:= 1.5\).

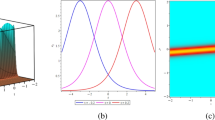
The 3D, contour and 2D (when y = 10) graphs for the perturbed lump-type kink soliton solution \(\psi _{1, 8 }\) stated in (24), are plotted for \(\lambda := 8, \mu := 10, \nu := 2, \varrho := 0.20E^{-1},\) \(C:= 1, t:= 1, \omega _{0}:= 4, \delta _{0}:= 3, k_{1}:= 1\).

The 3D, contour and 2D (when x = 1) graphs for the lump-type kink soliton solution \(\psi _{1, 9 }\) stated in (25), are plotted for \(\lambda := 1, \mu := 4, \nu := 4, \varrho := 0.50E^{-1},\) \(C:= 0.5, t:= 5, \omega _{0}:= 0.5, \delta _{0}:= 5, k_{1}:= 2\).

The 3D, contour and 2D (when y = 0) graphs for the twinning kink soliton solution \(\psi _{2, 4 }\) stated in (31), are plotted for \(\lambda := 1, \mu := 0, \nu := 1, \varrho := 0.75E^{-1},\) \(C:= 0.15, t:= 10, \omega _{0}:= 0.5E^{-1}, \omega _{1}:= 1, k_{1}:= 3\).

The 3D, contour and 2D (when x = 100) graphs for the bell-shaped kink soliton solution \(\psi _{2, 5 }\) stated in (32), are plotted for \(\lambda := 2, \mu := 5, \nu := 2, \varrho := 0.3E^{-1},\) \(C:= 0.7E^{-2}, t:= 20, \omega _{0}:= 0.1, \omega _{1}:= 1, k_{1}:= 5\).

The 3D, contour and 2D (when x = 1) graphs for the twinning kink soliton solution \(\psi _{2, 8 }\) stated in (35), are plotted for \(\lambda := 3, \mu := 13, \nu := 12, \varrho := 0.6E^{-1},\) \(C:= 0.51E^{-2}, t:= 30, \omega _{0}:= 1, \omega _{1}:= 5, k_{1}:= 10\).

The 3D, contour and 2D (when x = 100) graphs for the solitary kink soliton solution \(\psi _{2, 14 }\) stated in (41), are plotted for \(\lambda := 0, \mu := 1, \nu := 2, \varrho := 0.8E^{-2},\) \(C:= 0.24E^{-2}, t:= 25, \omega _{0}:= 3, \omega _{1}:= 2, k_{1}:= 1, w_{2}:= 6\).

The 3D, contour and 2D (when x = 1000) graphs for the multiple kink soliton solution \(\psi _{3, 3 }\) stated in (45), are plotted for \(\lambda := 1, \mu := 1, \nu := 1, \varrho := 0.45E^{-2},\) \(C:= 0.27E^{-2}, t:= 3, \omega _{0}:= 1, \omega _{1}:= 5, k_{1}:= 10\). This graph also shows axial perturbation.

The 3D, contour and 2D (when x = 10) graphs for the solitary kink soliton solution \(\psi _{3, 5 }\) stated in (47), are plotted for \(\lambda := 8, \mu := 10, \nu := 2, \varrho := 1,\) \(C:= 2, t:= 5, \omega _{0}:= 10, \omega _{1}:= 5, k_{1}:= 20\).

The 3D, contour and 2D (when x = 100) graphs for the perturbed lump-type kink soliton solution \(\psi _{3, 11 }\) stated in (53), are plotted for \(\lambda := 0, \mu := 5, \nu := 15, \varrho := 0.1, C:= 0.35,\) \(t:= 100, \omega _{0}:= 4, \omega _{1}:= 2, k_{1}:= 12, \tau := 5, n:= 3\).
Conclusion
This study generated and analysed soliton solutions for the MZKE using the RMESEM, which was helpful in capturing the fundamental physical processes of the model by incorporating exponential, rational, rational hyperbolic, trigonometric, and hyperbolic functions. By giving arbitrary values to the involved free parameters, the behaviour of these solutions was graphically analysed using three-dimensional, contour, and two-dimensional graphs. This revealed that the discovered solitons significantly exhibited the profiles of kink solitons, such as bell-shaped, lump-like, solitary, twinning, and perturbed kinks. Overall, by showcasing the RMESEM’s effectiveness in managing difficult mathematical models and its potential uses in the domains of science and engineering, this research significantly advances our understanding of the MZKE system. The data presented in this publication will be very informative for researchers who are interested in investigating the dynamics of the MZKE and related phenomena. While the RMESEM has contributed significantly to our understanding of soliton dynamics and their relationship to the models under investigation, it is important to acknowledge the limitations of this method, particularly when the nonlinear term and greatest derivative are not balanced evenly. Notwithstanding this limitation, the present investigation demonstrates that the methodology employed in this work is extremely dependable, productive and transferable for nonlinear problems in a variety of natural science domains.
Data availability
The datasets used and/or analysed during the current study available from the corresponding author on reason- able request.
References
Guo, Z., Wan, F. & Zhou, F. Positive singular solutions of a nonlinear Maxwell equation arising in mesoscopic electromagnetism. J. Differ. Equ. 366, 249–291 (2023).
Doebner, H. D., Goldin, G. A. & Nattermann, P. Gauge transformations in quantum mechanics and the unification of nonlinear Schrödinger equations. J. Math. Phys. 40(1), 49–63 (1999).
Shtilman, L. & Polifke, W. On the mechanism of the reduction of nonlinearity in the incompressible Navier-Stokes equation. Phys. Fluids A Fluid Dyn. 1(5), 778–780 (1989).
Binder, B. J. Steady two-dimensional free-surface flow past disturbances in an open channel: solutions of the Korteweg–De Vries equation and analysis of the weakly nonlinear phase space. Fluids 4(1), 24 (2019).
Abdelwahed, H. G. & Abdelrahman, M. A. New nonlinear periodic, solitonic, dissipative waveforms for modified-Kadomstev–Petviashvili-equation in nonthermal positron plasma. Results Phys. 19, 103393 (2020).
Tatarinova, L. L. & Garcia, M. E. Exact solutions of the eikonal equations describing self-focusing in highly nonlinear geometrical optics. Phys. Rev. A-At. Mol. Opt. Phys. 78(2), 021806 (2008).
Joly, J. L., Metivier, G. & Rauch, J. Transparent nonlinear geometric optics and Maxwell-Bloch equations. J. Differ. Equ. 166(1), 175 (2000).
Charles, F., Despres, B., Perthame, B. & Sentis, R. Nonlinear stability of a Vlasov equation for magnetic plasmas. arXiv preprint arXiv:1204.4613 (2012).
Garner, J. & Benedek, R. Solution to Ginzburg–Landau equations for inhomogeneous superconductors by nonlinear optimization. Phys. Rev. B 42(10), 6027 (1990).
Levin, V. A., Podladchikov, Y. Y. & Zingerman, K. M. An exact solution to the Lame problem for a hollow sphere for new types of nonlinear elastic materials in the case of large deformations. Eur. J. Mech.-A/Solids 90, 104345 (2021).
Khodabakhshi, P. & Reddy, J. N. A unified beam theory with strain gradient effect and the von Kármán nonlinearity. ZAMM-J. Appl. Math. Mech./Z. Angew. Math. Mech. 97(1), 70–91 (2017).
Bazzani, A., Colombini, D. G. & Zelco, C. Dynamical Models in Neuroscience: The Delay FitzHugh-Nagumo Equation.
Frey, R. & Polte, U. Nonlinear Black-Scholes equations in finance: Associated control problems and properties of solutions. SIAM J. Control Optim. 49(1), 185–204 (2011).
Roshid, M. M., Rahman, M. M. & Or-Roshid, H. Effect of the nonlinear dispersive coefficient on time-dependent variable coefficient soliton solutions of the Kolmogorov–Petrovsky–Piskunov model arising in biological and chemical science. Heliyon 10(11) (2024).
Ntiamoah, D., Ofori-Atta, W., & Akinyemi, L. The higher-order modified Korteweg–de Vries equation: Its soliton, breather, and approximate solutions. J. Ocean Eng. Sci. (2024).
Şenol, M., Gençyiǧit, M., Ntiamoah, D., & Akinyemi, L. New (3+1)-dimensional conformable KdV equation and its analytical and numerical solutions. Int. J. Mod. Phys. B. (2024).
Akpan, U., Akinyemi, L., Ntiamoah, D., & Houwe, A. Generalized stochastic Korteweg–de Vries equations, their Painlevé integrability, N-soliton and other solutions. Int. J. Geom. Methods Mod. Phys. (2024).
Barman, H. K. et al. Solutions to the Konopelchenko-Dubrovsky equation and the Landau–Ginzburg–Higgs equation via the generalized Kudryashov technique. Results Phys. 24, 104092 (2021).
Jabbari, A., Kheiri, H. & Bekir, A. Exact solutions of the coupled Higgs equation and the Maccari system using He’s semi-inverse method and (G G)-expansion method. Comput. Math. Appl. 62(5), 2177–2186 (2011).
Evequoz, G. & Weth, T. Real solutions to the nonlinear Helmholtz equation with local nonlinearity. arXiv preprint arXiv:1302.0530 (2013).
Tadmor, E. A review of numerical methods for nonlinear partial differential equations. Bull. Am. Math. Soc. 49(4), 507–554 (2012).
Odibat, Z. & Momani, S. Numerical methods for nonlinear partial differential equations of fractional order. Appl. Math. Model. 32(1), 28–39 (2008).
Forsyth, P. A. & Vetzal, K. R. Numerical methods for nonlinear PDEs in finance. In Handbook of Computational Finance 503–528 (Springer, 2011).
Akbar, M. A. et al. Soliton solutions to the Boussinesq equation through sine-Gordon method and Kudryashov method. Results Phys. 25, 104228 (2021).
Yang, X. F., Deng, Z. C. & Wei, Y. A Riccati–Bernoulli sub-ODE method for nonlinear partial differential equations and its application. Adv. Differ. Equ. 2015, 1–17 (2015).
Ali, R., Barak, S. & Altalbe, A. Analytical study of soliton dynamics in the realm of fractional extended shallow water wave equations. Phys. Scr. 99(6), 065235 (2024).
Khan, H., Barak, S., Kumam, P. & Arif, M. Analytical solutions of fractional Klein–Gordon and gas dynamics equations, via the (G’/G)-expansion method. Symmetry 11(4), 566 (2019).
Khan, H., Baleanu, D., Kumam, P. & Al-Zaidy, J. F. Families of travelling waves solutions for fractional-order extended shallow water wave equations, using an innovative analytical method. IEEE Access 7, 107523–107532 (2019).
Hammad, M. M. A., Shah, R., Alotaibi, B. M., Alotiby, M., Tiofack, C. G. L., Alrowaily, A. W. & El-Tantawy, S. A. On the modified versions of G’ G-expansion technique for analyzing the fractional coupled Higgs system. AIP Adv. 13(10) (2023).
Ali, R. & Tag-eldin, E. A comparative analysis of generalized and extended (G’ G)-expansion methods for travelling wave solutions of fractional Maccari’s system with complex structure. Alex. Eng. J. 79, 508–530 (2023).
Razzaq, W., Zafar, A., Ahmed, H. M. & Rabie, W. B. Construction solitons for fractional nonlinear Schrödinger equation with ß-time derivative by the new sub-equation method. J. Ocean Eng. Sci. (2022).
He, J. H. & Wu, X. H. Exp-function method for nonlinear wave equations. Chaos Solit. Fract. 30(3), 700–708 (2006).
Cinar, M., Secer, A., Ozisik, M. & Bayram, M. Derivation of optical solitons of dimensionless Fokas–Lenells equation with perturbation term using Sardar sub-equation method. Opt. Quantum Electron. 54(7), 402 (2022).
Shi-qiang, D. Poincare-Lighthill–Kuo method and symbolic computation. Appl. Math. Mech. 22, 261–269 (2001).
Ali, R., Zhang, Z. & Ahmad, H. Exploring soliton solutions in nonlinear spatiotemporal fractional quantum mechanics equations: An analytical study. Opt. Quantum Electron. 56(5), 1–31 (2024).
Bilal, M. et al. Exploring families of solitary wave solutions for the fractional coupled Higgs system using modified extended direct algebraic method. Fract. Fract. 7(9), 653 (2023).
Ali, R. et al. Exploring propagating soliton solutions for the fractional Kudryashov–Sinelshchikov equation in a mixture of liquid-gas bubbles under the consideration of heat transfer and viscosity. Fract. Fract. 7(11), 773 (2023).
Aldandani, M., Altherwi, A. A. & Abushaega, M. M. Propagation patterns of dromion and other solitons in nonlinear Phi-Four (f 4) equation. AIMS Math. 9(7), 19786–19811 (2024).
Yasmin, H., Aljahdaly, N. H., Saeed, A. M. & Shah, R. Investigating symmetric soliton solutions for the fractional coupled Konno-Onno system using improved versions of a novel analytical technique. Mathematics 11(12), 2686 (2023).
Yasmin, H., Aljahdaly, N. H., Saeed, A. M. & Shah, R. Probing families of optical soliton solutions in fractional perturbed Radhakrishnan–Kundu–Lakshmanan model with improved versions of extended direct algebraic method. Fract. Fract. 7(7), 512 (2023).
Hietarinta, J. Introduction to the Hirota bilinear method. In Integrability of Nonlinear Systems: Proceedings of the CIMPA School Pondicherry University, India, 8–26 Jan 1996. 95–103. (Springer, 2007).
Barman, H. K., Islam, M. E. & Akbar, M. A. A study on the compatibility of the generalized Kudryashov method to determine wave solutions. Propuls. Power Res. 10(1), 95–105 (2021).
Kopçasız, B. Qualitative analysis and optical soliton solutions galore: Scrutinizing the (2+ 1)-dimensional complex modified Korteweg–de Vries system. Nonlinear Dyn. 112(23), 21321–21341 (2024).
Kopçasız, B. Exploration of soliton solutions and modulation instability analysis for cold bosonic atoms in a zig-zag optical lattice in quantum physics. Nonlinear Dyn. 1–16 (2025).
Kopçasız, B., & Nur Kaya Saǧlam, F. Exploration of soliton solutions for the Kaup–Newell model using two integration schemes in mathematical physics. Math. Methods Appl. Sci. (2025).
Kopçasız, B. Unveiling new exact solutions of the complex-coupled Kuralay system using the generalized Riccati equation mapping method. J. Math. Sci. Model. 7(3), 146–156 (2024).
Saǧlam, F. N. K., Kopçasız, B. & Tariq, K. U. Optical solitons and dynamical structures for the zig-zag optical lattices in quantum physics. Int. J. Theor. Phys. 64(2), 1–20 (2025).
Kopçasız, B. & Yaşar, E. Soliton solutions, sensitivity analysis, and multistability analysis for the modified complex Ginzburg–Landau model. Eur. Phys. J. Plus 140(3), 216 (2025).
Saǧlam, F. N. K., Kopçasız, B., & Şenol, M. Abundant new soliton solutions to the Arshed–Biswas equation via two novel integrating schemes. Mod. Phys. Lett. A 2550054 (2025).
Zhou, X., Shan, W., Niu, Z., Xiao, P. & Wang, Y. Lie symmetry analysis and some exact solutions for modified Zakharov–Kuznetsov equation. Mod. Phys. Lett. B 32(31), 1850383 (2018).
Linares, F. & Ponce, G. On special regularity properties of solutions of the Zakharov–Kuznetsov equation. Commun. Pure Appl. Anal 17(4), 1561–1572 (2018).
Das, A. Explicit Weierstrass traveling wave solutions and bifurcation analysis for dissipative Zakharov–Kuznetsov modified equal width equation. Comput. Appl. Math. 37(3), 3208–3225 (2018).
Alqhtani, M., Saad, K. M., Shah, R. & Hamanah, W. M. Discovering novel soliton solutions for (3+ 1)-modified fractional Zakharov–Kuznetsov equation in electrical engineering through an analytical approach. Opt. Quantum Electron. 55(13), 1149 (2023).
Yu, J., Wang, D. S., Sun, Y. & Wu, S. Modified method of simplest equation for obtaining exact solutions of the Zakharov–Kuznetsov equation, the modified Zakharov–Kuznetsov equation, and their generalized forms. Nonlinear Dyn. 85, 2449–2465 (2016).
Ray, S. S. & Sahoo, S. New exact solutions of fractional Zakharov–Kuznetsov and modified Zakharov–Kuznetsov equations using fractional sub-equation method. Commun. Theor. Phys. 63(1), 25 (2015).
Raut, S., Roy, S., Kairi, R. R. & Chatterjee, P. Approximate analytical solutions of generalized Zakharov–Kuznetsov and generalized modified Zakharov–Kuznetsov equations. Int. J. Appl. Comput. Math. 7, 1–25 (2021).
Islam, S., Alam, M. N., Al-Asad, M. F. & Tunç, C. An analytical technique for solving new computational solutions of the modified Zakharov–Kuznetsov equation arising in electrical engineering. J. Appl. Comput. Mech. 7(2), 715–726 (2021).
Mirzazadeh, M. Modified simple equation method and its applications to nonlinear partial differential equations. Inf. Sci. Lett. 3(1), 1 (2014).
Ali, A., Ahmad, J. & Javed, S. Exact soliton solutions and stability analysis to (3+ 1)-dimensional nonlinear Schrödinger model. Alex. Eng. J. 76, 747–756 (2023).
Ghanbari, B. & Nisar, K. S. Determining new soliton solutions for a generalized nonlinear evolution equation using an effective analytical method. Alex. Eng. J. 59(5), 3171–3179 (2020).
Cao, Y. et al. Classes of new analytical soliton solutions to some nonlinear evolution equations. Results Phys. 31, 104947 (2021).
Arshed, S., Raza, N. & Alansari, M. Soliton solutions of the generalized Davey-Stewartson equation with full nonlinearities via three integrating schemes. Ain Shams Eng. J. 12(3), 3091–3098 (2021).
Bilal, M., Ren, J. & Younas, U. Stability analysis and optical soliton solutions to the nonlinear Schrodinger model with efficient computational techniques. Opt. Quantum Electron. 53, 1–19 (2021).
Manafian, J. Optical soliton solutions for Schrödinger type nonlinear evolution equations by the tan \((\Phi (\xi )/2)\)-expansion method. Optik 127(10), 4222–4245 (2016).
Zayed, E. M. E. & Al-Nowehy, A. G. The Riccati equation method combined with the generalized extended (G/G)-expansion method for solving the nonlinear KPP equation. J. Math. Res. Appl 37, 577–590 (2017).
Fan, E. Extended tanh-function method and its applications to nonlinear equations. Phys. Lett. A 277(4–5), 212–218 (2000).
Ren, Y. J. & Zhang, H. Q. A generalized F-expansion method to find abundant families of Jacobi elliptic function solutions of the (2+ 1)-dimensional Nizhnik–Novikov–Veselov equation. Chaos Solitons Fract. 27(4), 959–979 (2006).
Funding
This work was supported by the Deanship of Scientific Research, the Vice Presidency for Graduate Studies and Scientific Research,King Faisal University, Saudi Arabia (Grant No. KFU253846).
Author information
Authors and Affiliations
Contributions
Conceptualization, M.M.A and S.N.; methodology, R.S.; software, H.Y.; validation, M.M.A.; formal analysis, S.N..; investigation, R.S.; resources, R.S.; data curation, H.Y.; writing—original draft preparation, M.M.A; writing—review and editing, R.S.; visualization, H.Y.; supervision, S.N..; project administration, H.Y.. All authors have read and agreed to the published version of the manuscript.
Corresponding authors
Ethics declarations
Competing interests
The authors declare no competing interests.
Additional information
Publisher’s note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Appendix
Appendix
Numerous solitary wave solutions in five families—the exponential, periodic, hyperbolic, rational-hyperbolic, and rational families of solutions—were generated using the suggested RMESEM, which incorporates the Riccati equation. Consequently, the chosen model benefited from this inclusion. Our understanding of solitary wave dynamics has significantly increased thanks to the solutions offered, which enable us to connect the events in the targeted framework to underlying theories. Restricting the solutions of our technique leads to particular solutions for other methods. The following subsection provides an analogy:
Comparison with alternative analytical techniques
Our method yields the same results as a number of different analytical methods. For instance,
Comment 1: The resulting form of solution is generated when \({\omega }_1=0\) is set up in (13):
This shows the EDAM, tanh function method, tan function method and F-expansion method’s closed form solutions. In order to achieve \({\omega }_1=0\), our results may also yield the solutions produced by these methods.
Comment 2: In a similar vein, if \({\delta }_0=0\) is replaced in equation (13), the solution framework that described below:
is produced. This is the series-form solution that is obtained by applying the Riccati equation and the (G’/G)-expansion technique.
Thus, our study’s findings could offer a greater variety of solutions than those produced by the tan-function method64, the (G’/G)-expansion technique65, tanh function method66, EDAM35 and F-expansion method67. Additionally, we clarify that the cases in “Establishing kink soliton solutions for MZKE”—Case 1 \((\omega _1 = 0)\) and Case 2 \((\delta _0 = 0)\)–correspond to solution structures that can be obtained using the other techniques mentioned, but Case 3 produces new wave structures that haven’t been reported in previous studies. Additionally, we emphasize the RMESEM’s greater versatility and broader variety of applications by pointing out that keeping the non-zero integration constant in (12) reduces solution loss and allows the creation of unique and diverse waveforms.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution-NonCommercial-NoDerivatives 4.0 International License, which permits any non-commercial use, sharing, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if you modified the licensed material. You do not have permission under this licence to share adapted material derived from this article or parts of it. The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by-nc-nd/4.0/.
About this article

Cite this article
Al-sawalha, M.M., Noor, S., Shah, R. et al. Unveiling solitary and twinning kink solitons in (2+1)-dimensional modified Zakharov–Kuznetsov equation arising in electronics. Sci Rep 15, 42126 (2025). https://doi.org/10.1038/s41598-025-26017-w
Received:
Accepted:
Published:
Version of record:
DOI: https://doi.org/10.1038/s41598-025-26017-w
