
Abstract
This paper suggests a disturbance observer (DOB)-based offset-free output voltage regulator for the three-phase AC/DC power converters, taking the nonlinearity, parameter, and load uncertainties into account. The proposed multiloop controller is designed in such a way that it feeds back only proportional errors and stabilizes the output voltage and current tracking errors involving the feed-forward compensation terms driven by the DOBs. The DOBs assist the inner and outer loop controllers to ensure the performance recovery and steady-state error rejection properties, which correspond to a major contribution of this article. A three-phase 3-kW AC/DC power converter is used for experimentally verifying the efficacy of the proposed technique.
Similar content being viewed by others
Introduction
To achieve high output voltage tracking performance, three-phase AC/DC power converters commonly utilize the pulse-width modulation (PWM) technique, which is well-regarded for its effectiveness in feedback control system design. Ensuring the stable and efficient operation of these converters is essential, particularly under varying parameters and load conditions. This requirement is especially critical in industrial applications where precise and reliable power conversion is imperative. Such applications encompass four primary areas: renewable power plants, microgrid systems, and motor drives.1,2,3,4.
The cascade control strategy is widely employed to regulate the output voltage of three-phase AC/DC power converters. In this framework, the outer loop generates the appropriate d-frame current command for the inner loop, thereby achieving output voltage regulation. Due to their structural simplicity, proportional-integral (PI) controllers are commonly adopted for both control loops5,6,7. However, the inherent nonlinearities in three-phase AC/DC converter models, along with significant parameter and load variations, introduce uncertain disturbances that can severely degrade feedback performance or even lead to system instability. To address these challenges, various advanced nonlinear control approaches have been developed for the inner-loop current regulation. Methods such as feedback linearization (FL)8,9, passivity-based control10, and predictive control11 have shown substantial improvements in disturbance rejection and nonlinear compensation by leveraging accurate system parameters. In particular, model predictive control (MPC) techniques12,13,14 enhance transient response by minimizing cost function errors through exhaustive search algorithms executed at each sampling interval. Despite these advancements, the effectiveness of these controllers remains heavily dependent on accurate knowledge of converter parameters, raising concerns about their robustness under varying operating conditions and parameter uncertainties. To address this limitation, an adaptive current controller was proposed in15 to accommodate such uncertainties. However, its ability to guarantee offset-free current convergence in practical settings is unclear, primarily due to the lack of integral action in its tracking error dynamics. More recently, an adaptive control scheme introduced in16 integrates a self-tuning algorithm within both the inner and outer loops to improve voltage tracking performance. Nevertheless, the complexity of the resulting control structure is significant, as it incorporates integral action, self-tuning mechanisms, and parameter estimation algorithms17,18,19,20. Alternatively, disturbance observer-based (DOB) voltage controllers, such as those presented in21,22,23,24, offer a simpler structure by embedding integrators in the tracking error dynamics, though they may require anti-windup strategies to prevent integrator saturation.
A variety of multivariable control methodologies rooted in advanced control theory have been explored in25,26,27,28. These strategies generally follow a structured process: initially, a positive definite function is formulated to represent the tracking error dynamics; subsequently, a control input is designed to ensure that this function diminishes steadily over time. Although these techniques provide strong theoretical guarantees for system behavior, their success is highly contingent upon precise knowledge of the actual system parameters, which is essential for achieving both closed-loop stability and targeted control performance.
This article systematically and explicitly addresses nonlinearities and model-plant mismatches within the controller design framework. The proposed method adopts a multivariable control structure comprising a proportional-type nonlinear controller and first-order disturbance observers. The primary contribution of this study lies in the rigorous theoretical proof that the proposed algorithm ensures two critical closed-loop properties: (i) recovery of nominal performance and (ii) steady-state disturbance rejection—achieved without relying on integral action in the tracking error dynamics. This represents a significant departure from conventional approaches, such as those in21,22, which incorporate integrators for error correction. Furthermore, an experimental study using a prototype 3-kW power converter validates the practical merit of the proposed technique by benchmarking it against the feedback linearization (FL) technique.
Nonlinear dynamics of AC/DC power converters
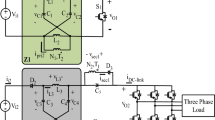
In this section, we briefly introduce the d-q frame dynamics of a three-phase AC/DC power converter aligned to the phase angle \(\theta\) of input AC source power (called the d-q transformation). For more comprehensive details, please refer to25,26. The topology of standard three-phase AC/DC power converter is depicted in Fig. 1 whose dynamics are obtained in this frame:

Circuit of AC/DC power converter.
The above d-q transformation turns for the original dynamics of the converter into (1) and (2) with the results \(e_d(t) = E_m\) and \(e_q(t) = 0\), \(\forall t \ge 0\), which eliminates the system nonlinearity such that
with \(E_m\) denoting the AC source voltage magnitude (in RMS). The nature of input-output power balancing also helps reduce the system nonlinearity by ensuring the relationship for the power p(t):
yielding:
with the output and load current denoted as \(i_{dc}(t)\) and \(i_L(t)\), \(\forall t \ge 0\).
To address the problems from unmodeled dynamics, parameter uncertainty, and load variations, the dynamical equations are re-written in terms of the nominal converter parameters as
with the nominal values \(R_0\), \(L_0\), and \(C_0\), where the time-varying signals \(w_{d,o}(t)\), \(w_{q,o}(t)\), and \(w_{v,o}(t)\) act as the uncertain perturbations from the model-plant mismatches.
Section Output voltage tracking controller design designs a novel output voltage feedback system that guarantees beneficial properties, such as performance recovery and offset-free operation, under the assumptions given by
-
1.
The perturbations \(w_{d,o}(t)\), \(w_{q,o}(t)\), and \(w_{v,o}(t)\) are uncertain and time-varying whose changing rate are bounded during the online operations.
-
2.
The phase currents in the a-b-c frame are available for feedback, enabling the corresponding d-q frame current to be obtained.
Output voltage tracking controller design
Design objective
Denoting the signals \(v_{dc}^*(t)\) as the desired output voltage response driven by the reference \(v_{dc,ref}(t)\), the Laplace transforms \(V_{dc}^*(s) = \mathscr {L}\{v_{dc}^*(t)\}\) and \(V_{dc,ref}(s) = \mathscr {L}\{v_{dc,ref}(t)\}\) define the desired transfer function:
with the bandwidth \(\omega _{vc}\) (rad/s, \(\frac{\omega _{vc}}{2\pi }\) Hz) as a design parameter. Then, the time domain implementation of the desired system (8) given by
constitutes the design objective defined as the exponential convergence
to assign the desired transfer function (8) to the closed-loop system.
Proposed controller
Outer loop controller
The two systems (4) and (9) and identity \(i_d(t) = i_{d,ref}(t) + \tilde{i}_d(t)\) for design variable \(i_{d,ref}(t)\) and d-frame current error \(\tilde{i}_d(t):= i_{d,ref}(t) - i_d(t)\) yield the system for the output voltage error \(\tilde{v}_{dc}^*:= v_{dc}^*(t) - v_{dc}(t)\) given by
where \(w_v(t):= C_0 \dot{v}^*_{dc}(t) - w_{v,o}(t)\), \(\forall t \ge 0\) (to be estimated by the DOB).
The proposed outer loop solution stabilizes the system (11) forming the simple compensated proportional-type control law
with a design parameter \(\lambda _{vc} > 0\) as the convergence rate of the output voltage error \(\tilde{v}_{dc}^*(t)\). Herein, the estimated disturbance \(\hat{w}_v(t)\) for \(w_v(t)\) acting as the dynamical compensation term satisfies the system (called the DOB):
incorporating \(\zeta _v(t)\) and \(l_v > 0\) as the state variable and gain, respectively.
Substituting the control law (12) to the system (11) derives the controlled outer loop dynamics given by
where \(\tilde{w}_v(t):= w_v(t) - \hat{w}_v(t)\), \(\forall t \ge 0\). Section Closed-loop analysis results presents the feedback system analysis results by further analyzing the controlled system (15).
Inner loop controller
The d-frame current reference given in (12) and q-frame current reference \(i_{q,ref}(t) = 0\) define the errors \(\tilde{i}_d(t):= i_{d,ref}(t) - i_d(t)\) and \(\tilde{i}_q(t):= i_{q,ref}(t) - i_q(t)\) yielding the system from (5) and (6):
where the available functions \(\phi _{d,0}(t):= R_0 i_d(t) - \omega _r L_0 i_q(t) - E_m\) and \(\phi _{q,0}(t):= R_0 i_q(t) + \omega _r L_0 i_d(t)\) and unavailable perturbations \(w_d(t):= L_0 \dot{i}_{d,ref}(t) - w_{d,o}(t)\) and \(w_q(t):= L_0 \dot{i}_{q,ref}(t) - w_{q,o}(t)\), \(\forall t \ge 0\) (to be estimated by the DOBs).
The proposed inner loop solution stabilizes the system (16) forming the simple compensated proportional-type control law given by
including a design parameter \(\lambda _{cc} > 0\) as the convergence rates of the current errors \(\tilde{i}_d(t)\) and \(\tilde{i}_q(t)\). Herein, the estimated disturbances \(\hat{w}_d(t)\) and \(\hat{w}_q(t)\) for \(w_d(t)\) and \(w_q(t)\) acting as the dynamical compensation terms satisfy the system (called the DOB):
incorporating \(\zeta _x(t)\) and \(l_x > 0\) as the state variable and gain, respectively.
Substituting the control laws (17) and (18) to the system (16) derives the controlled inner loop dynamics given by
where \(\tilde{w}_x(t):= w_x(t) - \hat{w}_x(t)\), \(x=d,q\), \(\forall t \ge 0\). Figure 2 depicts the proposed multi-loop feedback system consisting of (12)-(14) and (17)-(20).
Remark 1
The proposed control laws in (12), (17), and (18) are of a proportional type, incorporating feed-forward compensation terms derived from DOBs. The exclusion of integral actions simplifies the feedback system architecture by eliminating the need for additional anti-windup mechanisms. However, this design choice may reduce the closed-loop robustness to low-frequency disturbances, such as step or pulse-type inputs.

Proposed DOB-based multi-loop feedback system structure.
Closed-loop analysis results
Lemma 1 gives a property of the feedback system governed by (15), which considerably simplifies the whole feedback system analysis.
Lemma 1
For all \(\lambda _{vc} > 0\) and \(l_v > 0\), the outer loop control of (12) with the auxiliary system of (9) and DOB of (13) and (14), depicted in Fig. 2, ensures the strict passivity for the system:
for some \(\gamma _v > 0\).
Lemma 1 indicates that the output voltage of \(v_{dc}(t)\) rapidly converges to its targeted version \(v^*_{dc}(t)\) as \(\tilde{i}_d(t) \rightarrow 0\), \(\dot{w}_v(t) \rightarrow 0\) exponentially. Appendix proves Lemma 1 by showing that
to be:
for some \(\alpha _{v_c} > 0\) and \(\gamma _v > 0\).
Lemma 2 provides the beneficial results of the closed-loop system (21)-(22), which simplifies the stability analysis of the whole feedback system.
Lemma 2
For all \(\lambda _{cc} > 0\), \(l_x > 0\), \(x=d,q\), the inner loop controls of (17) and (18) with DOB of (19) and (20), depicted in Fig. 2, ensure the strict passivity for the system:
for some \(\gamma _x > 0\), \(x=d,q\).
Lemma 2 establishes that the d–q current tracking errors vanish exponentially whenever \(\tilde{v}^*_{dc}(t)\) and \(\dot{w}_x(t)\) converge to zero for \(x \in {d,q}\). In Appendix, Lemma 2 is proved by asserting the positive-definite function given as
to be:
for some constants \(\alpha _{dq} > 0\), \(\gamma _x > 0\), \(x=d,q\).
Remark 2
Lemmas 1 and 2 proves that the corresponding DOBs satisfies
with \(\hat{w}_x\) denoting the estimated disturbance of \(w_x\), whose transfer function is given by
which shows the selection guideline for \(l_x > 0\), \(x=v,d,q\), as the bandwidth of (29).
Theorem 1 derives the closed-loop property by analyzing the whole closed-loop error dynamics of (15), (21), and (22). The proof of Theorem 1 is given in Appendix.
Theorem 1
Under the same conditions of Lemmas 1and 2, the proposed controls of (12), (17), and (18) with the auxiliary system of (9) and DOBs of (13), (14), (19), and (20), depicted in Fig. 2, guarantee
for some \(\alpha _{cl} > 0\), \(\gamma _{cl} > 0\), and \(\underline{w}_x > 0\), \(x=v,d,q\).
It is important to highlight that the presence of steady-state errors in the closed-loop output voltage control system, when implemented with the proposed algorithm, remains uncertain due to the absence of integral actions in the tracking error dynamics. However, the proposed proportional-type output voltage control method, described in equations (12)–(14) and (17)–(20), guarantees steady-state error rejection without relying on integral actions. This feature simplifies the control algorithm by eliminating the need for anti-windup mechanisms, which represents a practical advantage of the proposed approach. A detailed explanation of this property is provided in Theorem 2, with its proof included in the Appendix.
Theorem 2
The resultant feedback system governed by the proposed controls of (12), (17), and (18) with the auxiliary system of (9) and DOBs of (13), (14), (19), and (20) always gets rid of the steady state errors of the output voltage, i.e,
where \(v^0_{dc}\) and \(v^0_{dc,ref}\) stand for the steady states of \(v_{dc}(t)\) and \(v_{dc,ref}(t)\), respectively.
Remark 3
The results presented in this section provide practical guidance for tuning the design parameters of the proposed technique. The recommended tuning procedure is as follows:
-
1.
Select the bandwidth \(l_x (\ge 30\) rad/s), \(x=v,d,q\), based on the first-order transfer function (29) (by Remark 2).
-
2.
Select the current error convergence rate \(\lambda _{cc} (\ge 2\pi 50)\), considering the desired first-order dynamics \(\dot{\tilde{i}}_x^* = -\lambda _{cc}\tilde{i}_x^*\) that approximate the closed-loop error dynamics in (21) and (22) (by Lemma 2).
-
3.
Increase the convergence rate \(\lambda _{vc} \ge 10\) to observe that \(|v_{dc}^* - v_{dc}| \approx 0\) (by Theorem 1).
This sequence yields the final tuned values of the design parameters, as applied in the experimental setup described in Section Experimental results.
Experimental results
Figure 3 shows the hardware platform used to experimentally assess the closed-loop behavior of the proposed method. The system parameters of three-phase power converters were chosen as
and the nominal values were chosen as
used for constructing the proposed controller. The AC source voltage magnitude was set to \(E_m = 122.47~V\). The digital signal processor (DSP) of TI (Texas Instrument) TMS320F28335 was used to implement the control algorithms, the PWM and control periods were chosen to be 0.1 ms.

The experimental setup.
The current and output voltage bandwidths were assigned to be \(f_{cc} = 150~Hz\) and \(f_{vc} = 10~Hz\) so that \(\omega _{cc} = 2\pi 150\) rad/s and \(\omega _{vc} = 2\pi 10\) rad/s for the implementation of the proposed controller. The DOB gains were adjusted as \(l_d = l_q = l_v = 62.8 ~rad/s\), for the transfer functions in (29). Note that, for maximizing the power factor, q-frame current reference was determined as \(i_{q,ref} = 0\) (see26,29). The output voltage convergence parameter of \(\lambda _{vc}\) of the proposed algorithm was tuned to be 188.4, and the other design factor of \(\lambda _{cc}\) was letting to be the same as the current bandwidth of \(\omega _{cc}\) for a fair comparison because the d-q frame current tracking error dynamics of (16) can be approximately written in a low-pass filter \(\dot{i}_x(t) = \lambda _{cc} (i_{x,ref}(t) - i_x(t))\), \(x=d,q\), \(\forall t \ge 0\), for slowly time varying current references \(i_{x,ref}(t)\), \(x=d,q\).
For a comparison, the FL and multi-loop PI controllers in9 and passivity-based controller (PBC) in30 were utilized; (FL controller) \(i_{d,ref}(t) = \frac{2v_{dc}(t)}{3E_m}( 2C_0\omega _{vc}\tilde{v}_{dc}(t) + C_0\omega ^2_{vc}\int _0^t \tilde{v}_{dc}(\tau )d\tau )\), \(v_d(t) = - L_0\omega _{cc}\tilde{i}_d (t) - R_0 \omega _{cc}\int _{0}^{t}\tilde{i}_d(\tau )\) \(d\tau + \omega _r L_0 i_q(t) + E_m\), \(v_q(t) = - L_0\omega _{cc}\tilde{i}_q(t) - R_0 \omega _{cc}\int _0^t\) \(\tilde{i}_q(\tau )d\tau - \omega _r L_0 i_d(t)\), (multi-loop PI controller) \(i_{d,ref}(t) = k_{\text {P,vc}}\tilde{v}_{dc}(t) + k_\text {I,vc}\int _0^t \tilde{v}_{dc}(\tau )d\tau\), \(v_d(t) = - k_{\text {P,cc}}\tilde{i}_d (t) -\) \(k_{\text {I,cc}}\int _{0}^{t}\tilde{i}_d(\tau ) d\tau\), \(v_q(t) = - k_{\text {P,cc}}\tilde{i}_q (t)\) \(- k_{\text {I,cc}}\int _{0}^{t}\tilde{i}_q(\tau ) d\tau\), (PBC) \(i_{d,ref}(t) = -k_\text {d,vc}v_{dc}(t) + C_0\omega _{vc}\tilde{v}_{dc}(t)\) \(+ k_\text {d,vc}\omega _{vc} \int _0^t\tilde{v}_{dc}(\tau )d\tau\), \(v_d(t) = -k_\text {d,cc}i_d(t) + L_0\omega _{cc}\tilde{i}_d(t)\) \(+ k_\text {d,cc}\omega _{cc}\) \(\int _0^t\tilde{i}_d(\tau )d\tau\), and \(v_q(t) =\) \(-k_\text {d,cc}i_q(t)\) \(+ L_0\omega _{cc}\tilde{i}_q(t) +\) \(k_\text {d,cc}\omega _{cc}\) \(\int _0^t\tilde{i}_q(\tau )d\tau\), where \(\tilde{v}_{dc}(t) = v_{dc,ref}(t) - v_{dc}(t)\), \(\forall t \ge 0\). The tuning parameters of these baseline controllers were founded to satisfy the desired dynamic behavior given by the closed-loop transfer function \(\frac{V_{dc}^*(s)}{V_{dc,ref}(s)} = \frac{\omega _{vc}}{s + \omega _{vc}}\) at \(R_L = 300~\Omega\) for the given bandwidths \(\omega _{vc} = 2\pi \cdot 10\) and \(\omega _{cc} = 2\pi \cdot 150\) rad/s.
Evaluation of tracking performance
This experiment was conducted to evaluate the output voltage tracking performance under three distinct resistive load conditions: \(R_L = 80\), 150, 300 \(\Omega\). The corresponding output voltage responses, shown in Fig. 4, demonstrate that the proposed control strategy maintains nearly identical voltage behavior across varying load scenarios using fixed control parameters—an outcome not achieved by the PBC, FL, and multi-loop PI techniques. The performance discrepancies observed in the Fig. 4 under other techniques could potentially be mitigated by implementing a gain scheduling mechanism; however, such an approach would increase the computational burden. The associated d-q frame current, control efforts (MI \(:= \sqrt{v_d^2 + v_q^2}\)), and DOB responses are illustrated in Figs. 5-8.

Comparison result of output voltage tracking performances for \(R_L = 80,150,300\Omega\).

Comparison result of d-frame current responses under output voltage tracking mode for \(R_L = 80,150,300\Omega\).

Comparison result of q-frame current responses under output voltage tracking mode for \(R_L = 80,150,300\Omega\).

Comparison result of control efforts (MI\(=\sqrt{v_d^2+v_q^2}\)) under output voltage tracking mode for \(R_L = 80,150,300\Omega\).

DOB responses under \(R_L = 80\Omega\).
Evaluation of regulation performance
In the second experimental scenario, the output voltage regulation capabilities were assessed under a sudden load change. The system was initially operating with the output voltage maintained at 300 V under \(R_L = 300~\Omega\), which was abruptly reduced to \(R_L = 75~\Omega\). As illustrated in the left panel of Fig. 9, the proposed control method significantly enhances voltage regulation by effectively minimizing the undershoot during the transient period. Additionally, as shown in the middle and right panels of Fig. 9, it accelerates the d-q frame current response, thereby contributing to improved dynamic performance of the proposed feedback system.

Comparison result of output voltage regulation performances and d-q frame current responses under abruptly decreasing load \(R_L = 300\) to \(75~\Omega\).
Evaluation of performance assignability
Following the same experimental conditions as the first scenario with \(R_L = 80~\Omega\), this experiment aimed to investigate how varying the bandwidth, 6, 8, and 10 Hz, affects the output voltage tracking behavior. The results, presented in Fig. 10, validate the performance assignability property established in Theorem 1. These findings confirm that the proposed method enables flexible tuning of the feedback system performance through appropriate selection of the bandwidth.

Controlled output voltage responses as magnifying bandwidth as 6, 8, 10 Hz.
Evaluation result of feedback system performance
This subsection quantitatively evaluates the performance comparison results described in Sections Evaluation of tracking performance-Evaluation of regulation performance, using the performance index defined as \(f_{\text {perf}}:= \sqrt{\int _0^\infty |v_{dc}^* - v_{dc}|^2 + i_d^2 + i_q^2 + \text {MI}^2 dt}\). The comparative outcomes are tabulated in Fig. 11, showing at least an 17\(\%\) improvement over the other controllers in all evaluated cases.

Performance evaluation result.
Evaluation result of computational burden
This subsection investigates the computational burden associated with implementing different feedback control schemes, including the proposed controller, the PBC, and a conventional multi-loop PI controller, as outlined in Section Evaluation result of feedback system performance. A total of 4,000 experiments were conducted using randomly selected position references ranging from 450 to 550 V. As depicted in Fig. 12, the proposed approach required approximately 11\(\%\) more computation time than the traditional multi-loop PI controller, mainly because of the presence of DOBs. However, this increase is considered acceptable and reinforces the practicality of the proposed strategy as a viable control alternative.

Computational burden comparison result
Building on the findings from these experiments, the proposed method consistently ensures reliable closed-loop output voltage tracking and regulation, even when operating modes change, unlike the recent and conventional controllers. As a result, the proposed technique achieves stable and consistent closed-loop performance across a broad spectrum of operating conditions, without the need for an additional gain scheduling mechanism. This practical benefit highlights the effectiveness and robustness of the approach, making it well-suited for real-world industrial applications.
Conclusions
The proposed technique utilizes a multi-loop control structure, eliminating the need for integral action in tracking errors while ensuring performance recovery by integrating a nonlinear DOB with a proportional-type output voltage controller. It has been rigorously demonstrated that this method enhances output voltage tracking and improves closed-loop robustness to load variations, outperforming the traditional feedback linearization approach. However, the technique involves several design parameters, whose optimal values can be determined by solving an optimization problem constrained by linear or bilinear matrix inequalities. Future work will focus on further enhancing robustness through the systematic integration of integrators and disturbance observers.
Data availability
Data sets generated during the current study are available from the corresponding author on reasonable request.
Abbreviations
- L, R :
-
Coil inductance and resistance
- C :
-
Capacitance of output capacitor
- \(\omega _r\) :
-
Frequency of input AC input source power
- \(E_m\) :
-
Magnitude (in RMS) of AC input source voltage
- \(i_d(t)\), \(i_q(t)\) :
-
Coil current in d-q frame
- \(v_d(t)\), \(v_q(t)\) :
-
Control signal by switching actions in d-q frame
- \(e_d(t)\), \(e_q(t)\) :
-
AC input source voltage in d-q frame
- \(L_0\), \(R_0\), \(C_0\) :
-
Known nominal values of L, R, and C
- \(\omega _{vc}\) :
-
Closed-loop bandwidth of output voltage as specification
- \(\lambda _{vc}\), \(\lambda _{cc}\) :
-
Convergence rates of output voltage and current errors as design parameters
- \(l_v\), \(l_d\), \(l_q\) :
-
Gains of disturbance observer (DOB) as design parameters
- \(v_{dc}^*(t)\) :
-
Desired output voltage trajectory specified by \(\omega _{vc}\)
- \(\hat{w}_v(t)\), \(\hat{w}_d(t)\), \(\hat{w}_q(t)\) :
-
Estimated disturbance by DOBs for their true versions of \(w_v(t)\), \(w_d(t)\), and \(w_q(t)\)
- \(\zeta _v(t)\), \(\zeta _d(t)\), \(\zeta _q(t)\) :
-
State variables of DOBs
- \(\phi _{d,0}(t)\), \(\phi _{q,0}(t)\) :
-
Functions depending on available signals and known coefficients
References
Ashraf, N. e. a. Design and implementation of an innovative single-phase direct AC-AC bipolar voltage buck converter with enhanced control topology. Sci Rep. 14, 15971 (2024).
Bebboukha, A. e. a. A reduced vector model predictive controller for a three-level neutral point clamped inverter with common-mode voltage suppression. Sci Rep. 14, 15180 (2024).
Adel, F. e. a. A single-phase direct buck-boost AC–AC converter with minimum number of components. Sci Rep. 13, 9009 (2023).
Tiwari, P., Pathak, S. K. & Siju, V. Design, development and characterization of resistive arm based planar and conformal metasurfaces for RCS reduction. Sci Rep. 12, 14992 (2022).
Dixon, J. W. & Ooi, B. T. Indirect current control of a unity power factor sinusoidal current boost type three phase rectifier. IEEE Trans. Ind. Electron. 35, 508–515 (1988).
Tsai, M. T. & Tsai, W. I. Analysis and design of three-phase AC-to-DC converters with high power factor and near-optimum feedforward. IEEE Trans. Ind. Electron. 46, 263–273 (1999).
Blasko, V. & Kaura, V. A new mathematical model and control of a three-phase AC/DC voltage source converter. IEEE Trans. Power Electron. 12, 116–123 (1997).
Lee, T.-S. Input-output linearization and zero-dynamics control of three-phase AC/DC voltage-source converters. IEEE Trans. Power Electron. 31, 11–22 (2003).
Kazmierkowski, M., Krishna, R. & Blaabjerg, F. Control in Power Electronics - Selected Problems (Academic Press, 2002).
Lee, T.-S. Lagrangian modeling and passivity based control of three phase AC to DC voltage source converters. IEEE Trans. Ind. Electron. 51, 892–902 (2004).
Bouafia, A., Gaubert, J.-P. & Krim, F. Predictive direct power control of three-phase pulsewidth modulation (PWM) rectifier using space-vector modulation (SVM). IEEE Trans. Power Electron. 25, 228–236 (2010).
Vargas, R., Cortes, P., Ammann, U., Rodriguez, J. & Pontt, J. Predictive control of a three-phase neutral-point-clamped inverter. IEEE Trans. Ind. Electron. 54, 2697–2705 (2007).
Quevedo, D. E., Aguilera, R. P., Perez, M. A., Cortes, P. & Lizana, R. Model predictive control of an AFE rectifier with dynamic references. IEEE Trans. Power Electron. 27, 3128–3136 (2012).
Rodriguez, J. & Cortes, P. Predictive Control of Power Converters and Electrical Drives (Wiley-IEEE Press, 2012).
Vazquez, S., Sanchez, J. A., Carrasco, J. M., Leon, J. I. & Galvan, E. A model based direct power control for three-phase power converters. IEEE. Trans. Ind. Electron. 55, 1647–1657 (2008).
Kim, S.-K. Self-tuning adaptive feedback linearizing output voltage control for AC/DC converter. Control Eng. Pract. 45, 1–11 (2015).
Srilakshmi, K. et al. Development of renewable energy fed three-level hybrid active filter for ev charging station load using jaya grey wolf optimization. Sci Rep. 14, 4429 (2024).
Wu, X. et al. Adaptive suspension state estimation based on immakf on variable vehicle speed, road roughness grade and sprung mass condition. Sci Rep. 14, 1740 (2024).
Mejia, J., Mederos, B. & et al., N. G. Adaptive filter with riemannian manifold constraint. Sci Rep. 13, 9014 (2023).
Tian, Y. et al. Application of a long short-term memory neural network algorithm fused with kalman filter in UWB indoor positioning. Sci Rep. 14, 1925 (2024).
Salomonsson, D. & Sannino, A. Direct power control based on natural switching surface for three-phase PWM rectifiers. In Industry Applications Conference, 2007. 42nd IAS Annual Meeting. Conference Record of the 2007 IEEE (2007).
Wang, C., Xialin Li, L. G. & Li, Y. W. A nonlinear-disturbance-observer-based DC-bus voltage control for a hybrid AC/DC microgrid. IEEE Trans. Power Electron. 29, 6162–6177 (2014).
Viswambharan, A., Errouissi, R., Debouza, M., Shareef, H. & Wahyudie, A. Disturbance observer-based robust current control scheme for three-phase grid-tied inverters with LCL filter considering unbalanced grid voltages. IEEE Trans. Power Electron. 40, 2761–2779 (2025).
Viswambharan, A. & Errouissi, R. Disturbance observer based control for torque ripple mitigation in PMSG-based wind turbine during unbalanced grid voltages. In 2023 IEEE Industry Applications Society Annual Meeting (IAS), Nashville, TN, USA, 2023 (2023).
Lee, D.-C., Lee, G.-M. & Lee, K.-D. DC-bus voltage control of three-phase AC/DC PWM converters using feedback linearization. IEEE Trans. Ind. Appl. 36, 826–833 (2000).
Komurcugil, H. & Kukrer, O. Lyapunov-based control for three-phase PWM AC/DC voltage-source converters. IEEE Trans. Power Electron. 13, 801–813 (1998).
Gomez, M. H., Ortega, R., Lagarrigue, F. L. & Escobar, G. Adaptive PI stabilization of switched power converters. IEEE. Trans. Control Syst. Technol. 18, 688–698 (2010).
Flores, D. D. P. et al. Passivity-based control by series/parallel damping of single-phase pwm voltage source converter. IEEE. Trans. Control Syst. Technol. 3, 459–471 (2012).
Lee, T.-S. Input-output linearization and zero-dynamics control of three-phase AC/DC voltage-source converters. IEEE Trans. Power Electron. 18, 11–12 (2003).
Nithara, P. V. et al. A passivity based nonlinear controller for hybrid DC microgrid with constant power loads. Sci Rep. 15, 16904 (2025).
Acknowledgements
This work was supported by the Ministry of Trade, Industry and Energy (MOTIE) and the Korea Institute of Energy Technology Evaluation and Planning (KETEP), Republic of Korea. (No. 20223030003030).
Author information
Authors and Affiliations
Contributions
Conceptualization and methodology, S.-K. Kim; software, validation, formal analysis, investigation, writing—original draft preparation, and writing—review and editing, H. Lee, D. Kim, H. C. Park, and Y. Kim; resources, supervision, project administration, and funding acquisition, S.-K. Kim and Y. Kim. All authors reviewed and agreed to submit this paper to this journal.
Corresponding authors
Ethics declarations
Competing interests
The authors declare no competing interests.
Additional information
Publisher’s note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Supplementary Information
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution-NonCommercial-NoDerivatives 4.0 International License, which permits any non-commercial use, sharing, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if you modified the licensed material. You do not have permission under this licence to share adapted material derived from this article or parts of it. The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by-nc-nd/4.0/.
About this article

Cite this article
Lee, H., Kim, D., Park, H.C. et al. Disturbance observer based multiloop proportional feedback system for output voltage regulation in three phase AC to DC converters. Sci Rep 15, 42605 (2025). https://doi.org/10.1038/s41598-025-26498-9
Received:
Accepted:
Published:
Version of record:
DOI: https://doi.org/10.1038/s41598-025-26498-9
