
Abstract
As coal mine intelligentization advances, precise navigation for rapid excavation systems is critical for efficiency and safety. This study addresses several challenges, including GPS denial, a limited visual line-of-sight, and a lack of multiequipment collaboration in tunnels, by proposing an INS + Vision “mutual reference” collaborative positioning scheme. The method meets high-precision positioning requirements under complex working face conditions. Leveraging the alternating operation of the Bolter Miners (BMs) and the Bolt Transfer Units (BTUs), the scheme uses coordinate transformation and data fusion. When the BM moves while the BTU remains stationary, the BTU’s vision-inertial system acts as a local reference to update the BM’s pose in real-time. Conversely, when the BTU moves with the BM stationary, the BM’s fixed pose becomes the reference for reverse calculation of the BTU’s pose. This enables dynamic relative positioning between equipment, solving issues such as single-sensor error accumulation, visual occlusion, and long-range dependency. Experiments show that the BTU achieves maximum lateral/longitudinal errors of 34 mm/66 mm, whereas the BM achieves 28 mm/66 mm. These satisfy underground positioning requirements, confirming the feasibility and expected performance of the proposed integrated navigation method for rapid excavation systems.
Similar content being viewed by others

Introduction
As a cornerstone resource of China’s energy system, coal production has consistently accounted for over 50% of global output. In 2020, the National Development and Reform Commission and seven other ministries jointly issued the “Guiding Opinions on Accelerating the Development of Coal Mine Intelligence,” establishing clear development objectives and primary tasks for coal mine intelligentization while imposing higher requirements for intelligent mining and excavation operations1,2,3.
Conventional boom-type roadheaders rely on manual operation, resulting in high labor intensity, low cutting precision, and elevated operational risks, severely constraining the development of intelligent mining operations4,5. Although the introduction of the Bolter Miners in recent years has enhanced the collaborative efficiency between excavation and support operations6,7,8, adverse conditions in enclosed tunnel environments—including GPS signal loss, high dust concentrations, and complex electromagnetic interference—have rendered existing single-sensor systems (such as odometers, total stations, and inertial navigation systems) inadequate for meeting the high-precision, anti-interference positioning and navigation requirements of excavation equipment9,10,11,12.
Integrated navigation technology compensates for single-technology deficiencies through multisensor fusion. Centered on inertial navigation technology while incorporating auxiliary measurement methods, it combines the advantages of various technologies to achieve continuous, stable, multi-parameter measurement of excavation equipment, effectively addressing precise positioning challenges13,14. Li et al.15 employed tightly-coupled integration of inertial navigation and ultra-wideband (UWB) systems, experimentally validating that this approach reduces system non-line-of-sight errors and improves roadheader positioning accuracy. However, ultra-wideband signals are frequently absorbed in tunnel environments, and base station deployment is spatially restricted, leading to positioning errors.
Studies16,17,18 have integrated odometer-derived velocity and position information with inertial navigation, employing filtering algorithms for data fusion to achieve excavation equipment pose measurement. However, odometers are typically installed on roadheader tracks and are susceptible to track slippage due to tunnel floor conditions, causing the odometer output to deviate from actual equipment motion states. Zhang19 and Wang et al.20 utilized total station and strapdown inertial navigation fusion positioning technology, applying Kalman filtering algorithms to integrate measurements from both systems to reduce inertial navigation cumulative errors. Nevertheless, total station-inertial navigation systems depend on preset control points or reflective prisms, making them unsuitable for dynamic or complex environmental navigation, inconvenient for field operation, and requiring high operator skill levels.
SLAM technology has also been widely studied for applications in enclosed railway tunnels. The tightly coupled LiDAR–IMU approach proposed by Li et al.21 achieves centimeter-level accuracy in degraded long tunnels. Trybała et al.22 validated that low-cost handheld LiDAR-SLAM systems maintain high accuracy in complex underground environments. Koval et al.23 evaluated multiple LiDAR-SLAM algorithms and found relatively stable trajectory estimation in narrow tunnels. SLAM enables simultaneous localization and mapping with high on-site flexibility, but in long-distance rapid excavation it remains sensitive to geometric degeneracy and is still affected by drift and insufficient loop closure.
Recent research by Yang24, Lei25, Huang26, and others has explored vision-inertial integration approaches, proposing the direct installation of illuminated optical targets on excavation equipment and employing vision measurement systems at the rear of equipment to measure these targets, thereby enhancing visual measurement anti-interference capabilities. Cui27 adopted vision-inertial integration by automatically identifying and measuring environmental features through vision measurement systems, establishing inertial fusion models to reduce operational complexity and improve field usability.
Extensive underground experimental validation has demonstrated that vision-inertial integration exhibits complementary advantages, making it the most commonly used and effective technical solution for excavation working face navigation and positioning systems. However, considering the specific characteristics of rapid excavation systems, direct application of this technology in Bolter Miner equipment faces three primary challenges28,29,30: (1) Underground positioning solutions typically target single equipment and lack unified coordinate systems and real-time calculation methods for multiequipment collaborative positioning, whereas rapid excavation systems require simultaneous positioning of multiple targets. (2) Support structures frequently obstruct visual measurement sight paths, creating monitoring blind zones and failing to meet line-of-sight requirements. (3) During long-distance rapid excavation, vision modules require frequent repositioning, leading to cumbersome operations and the potential introduction of significant positioning errors.
To address these challenges, this study proposes an integrated navigation positioning scheme suitable for rapid excavation equipment. Based on multi-source fusion navigation and positioning technology combining inertial navigation and vision (INS + Vision), the scheme employs a “mutual reference” real-time calculation method using the Bolter Miners and the Bolt Transfer Units as references to resolve simultaneous navigation and positioning of multiple equipment in integrated systems. To address visual occlusion issues, the scheme eliminates long-distance frequent suspension operation requirements through system architecture design and optimized onboard installation.
This scheme offers significant engineering application value. It enhances tunneling efficiency by enabling multiequipment collaborative precise positioning. Furthermore, it improves operational safety and significantly boosts the continuous and stable operational capability of the positioning system within complex tunneling environments.
The paper is structured as follows: Section II provides a detailed introduction of INS + Vision integrated navigation technology principles and the “mutual reference” integrated navigation positioning scheme; Section III presents the experimental design and results, validating scheme effectiveness through experimentation; and conclusions are provided in Section IV.
System composition and measurement principles
“INS + Vision” integrated navigation technology principle
INS + Vision integrated navigation technology is a method that achieves high-precision, robust autonomous positioning and navigation through data fusion of inertial navigation systems (INS) and visual sensors. Inertial navigation provides high-frequency motion information but suffers from cumulative errors, whereas vision systems provide low-frequency absolute or relative positioning information without cumulative errors. By fusing pose and position information from inertial navigation and vision systems through Kalman filtering, the accuracy of excavation equipment navigation and positioning is enhanced. Figure 1 illustrates the principle of INS + Vision integrated navigation and positioning.The “TBM” in the picture is an abbreviation for tunnel boring machine. TBM and Bolter Miner are both tunnel boring equipment, but Bolter Miners are specifically used for rapid mining of coal mines.This article combines the “mutual benchmark research method” to apply it to coal mine rapid excavation equipment including “Bolter Miner”.

Principle of “Inertial Navigation + Vision” Integrated Navigation and Positioning.
The visual measurement system captures real-time images of optical targets installed on the roadheader through cameras, extracting light spot pixel coordinates \(\:\left({\mu\:}_{x},{\mu\:}_{y}\right)\:\)using grayscale threshold segmentation and Gaussian fitting algorithms31,32 for spot detection. First, perform a coarse segmentation of the light spot, then use Gaussian fitting to improve the precision of the light spot center localization. For the input image \(\:I\left(x,y\right)\), apply a fixed or adaptive threshold T to obtain a binary image:
where, \(\:B\left(x,y\right)\) represents the candidate pixel set of the light spot area. Fit the grayscale distribution of the light spot area with a two-dimensional Gaussian function:
In this equation, \(\:{\mu\:}_{x},{\mu\:}_{y}\) are the coordinates of the light spot center, \(\:{\sigma\:}_{x},{\sigma\:}_{y}\) are the standard deviations, and A is the amplitude. The solution obtained for \(\:\left({\mu\:}_{x},{\mu\:}_{y}\right)\) is the sub-pixel accurate value of the pixel coordinates.
Based on the perspective projection model, using the 3D coordinates of target points in the target coordinate system and 2D pixel coordinates, the rotation matrix R and translation vector t from the camera coordinate system to the target coordinate system are solved by minimizing the reprojection error to obtain the global position \(\:{P}_{v}\) of the target center in the tunnel coordinate system.
The formula is as follows:
where K is the camera intrinsic matrix, and \(\:\left({\text{X}}_{\text{t}},{\text{Y}}_{\text{t}},{\text{Z}}_{\text{t}}\right)\) are the 3D coordinates of target points.
The fiber-optic INS subsequently obtains the angular velocity components of the Earth’s rotation and gravitational acceleration components, which are collected via gyroscopes and accelerometers in real time through its mathematical computation platform. Using the inertial coordinate system as a reference, it measures the angular and linear motion history of the carrier in the inertial coordinate system, as well as changes in the gravitational acceleration direction. After initial calibration and alignment to accurately estimate the initial attitude matrix, the roadheader’s position and attitude are obtained through integration operations. After validity checking and outlier removal before fusion, Kalman filtering algorithms are used to fuse these two data sources, outputting precise pose information of the roadheader in real-time and using the fused pose information to correct the INS, achieving precise positioning and orientation of the roadheader.
To integrate inertial navigation and visual data, this study adopts an Extended Kalman Filter (EKF) framework. The state vector is defined as:
where \(\:{\text{p}}_{\text{k}}=\left(\text{x},\text{y},\text{z}\right)\)represents position,\(\:{\text{v}}_{\text{k}}=\left({\text{v}}_{\text{x}},{\text{v}}_{\text{y}},{\text{v}}_{\text{z}}\right)\)represents velocity,\(\:{{\uptheta\:}}_{\text{k}}=\left({\upvarphi\:},{\uptheta\:},{\uppsi\:}\right)\) represents attitude angles,\(\:{\text{b}}_{\text{g}\text{k}}\)and\(\:{\text{b}}_{\text{a}\text{k}}\)represent the biases of the gyroscope and accelerometer, respectively. This design fully considers the main error sources of inertial drift.
The state transition equation is:
where \(\:{\text{F}}_{\text{k}}\) is the state transition matrix (obtained by discretizing the inertial navigation kinematic model), \(\:{\text{G}}_{\text{k}}\) is the noise driving matrix, and \(\:{\text{w}}_{\text{k}}\) is the process noise.
The observation equation is provided by the visual system:
The observation vector is defined as:
where \(\:\left({\text{x}}_{\text{v}},{\text{y}}_{\text{v}},{\text{z}}_{\text{v}}\right)\) are the positions measured by vision, and \(\:\left({{\upvarphi\:}}_{\text{v}},{{\uptheta\:}}_{\text{v}},{{\uppsi\:}}_{\text{v}}\right)\) are the attitude angles solved by vision. The observation noise \(\:{\text{v}}_{\text{k}}\) consists of spot detection errors and imaging errors.
Introduction to the “Mutual-Reference” integrated navigation positioning scheme
Unlike conventional roadheaders, the Bolter Miners integrate both excavation and anchoring support functions, requiring more complex operations with extremely high coordination demands. During operations, Bolter Miners must not only accomplish efficient rock-breaking excavation but also rapidly transition to bolt and cable support procedures within short timeframes, achieving parallel excavation and anchoring operations. This requires positioning systems to maintain high precision and reliability throughout frequent operational transitions and equipment actions.The core of this study is the ‘INS + Vision’ integrated navigation technology, where ‘mutual referencing’ is an innovative application of this technology for multi-device collaborative positioning within the rapid excavation system; that is, INS + Vision serves as the fundamental method, while mutual referencing represents the systematic application solution.
Furthermore, Bolter Miners typically operate in large-section tunnels, where expanded working spaces increase positioning complexity. Given the unique operational characteristics of Bolter Miners, this study proposes a mutual reference navigation scheme suitable for Bolter Miners based on existing roadheader INS + Vision integrated navigation and positioning technology:
The “mutual reference” integrated navigation positioning scheme achieves dynamic mutual positioning of Bolter Miners and Bolt Transfer Units through coordination between guidance measurement devices and vision-inertial systems. The core design objectives include ensuring vision measurement link stability through rational installation of guidance measurement devices and optical targets, resolving line-of-sight issues, reducing dependence on external positioning devices by using equipment themselves as references, eliminating long-distance frequent suspension requirements, and achieving simultaneous positioning and collaborative navigation of dual equipment through dynamic reference switching mechanisms.
(1) “Mutual reference” integrated navigation positioning installation scheme.
The composition of Bolter Miners and their supporting systems is illustrated in the following figure. During operations, the Bolter Miners and Bolt Transfer Units alternately advance, with the transfer machine following the Bolt Transfer Units. Therefore, in addition to navigation and positioning of Bolter Miners, simultaneous navigation and positioning of subsequent Bolt Transfer Units is required to ensure coordinated operation of all equipment within the system.

Schematic Diagram of “Mutual-Reference” Integrated Navigation Positioning Scheme.
The system comprises pose measurement devices installed on Bolter Miners and guidance measurement devices installed on Bolt Transfer Units. Pose measurement devices are mounted at the rear of Bolter Miners, consisting of inertial navigation systems, optical targets, and integrated navigation data processing modules. Guidance measurement devices are installed at the front of Bolt Transfer Units, comprising high-precision reference inertial navigation and vision measurement devices, with adjustment mechanisms for guidance device installation angles. The installation positions of guidance measurement devices and optical targets are verified through tunnel space simulation to ensure unobstructed vision measurement paths throughout the complete equipment travel range. This installation approach guarantees vision measurement pathways, resolving line-of-sight issues. Figure 2 illustrates the hardware configuration diagram of the proposed “Mutual-Reference” integrated navigation positioning scheme, clearly indicating the installation positions of the guidance measurement device on the Bolt Transfer Units and the pose measurement device on the Bolter Miners.
When the Bolter Miners move while the Bolt Transfer Units remain stationary, guidance measurement devices serve as references. Vision measurement devices within guidance systems measure optical targets consisting of four target points on pose measurement devices, performing visual positioning of pose measurement devices. Subsequently, visual positioning results are fused with inertial navigation data from pose measurement devices to obtain accurate positions and attitudes of pose measurement devices. High-precision reference inertial navigation within guidance devices is precalibrated to align with vision measurement coordinate systems, utilizing reference inertial navigation-provided heading and attitude information to transform vision measurement coordinate systems to tunnel coordinate system directions.
When the Bolt Transfer Units move while the Bolter Miners remain stationary, the same measurement approach is used to obtain real-time position and attitude of the pose measurement devices relative to guidance measurement devices. Based on fixed pose measurement device positions obtained from the previous cycle, pose measurement devices serve as references to reverse-calculate real-time position and attitude of guidance measurement devices, achieving “mutual reference” measurements.
(2)”Mutual reference” integrated navigation positioning workflow analysis.
Figure 3 visually depicts the overall workflow of the “Mutual-Reference” integrated navigation positioning system in the form of a flowchart, including mode switching and data fusion processes.

“Mutual reference” integrated navigation positioning workflow.
Traditional unidirectional visual guidance measurement is prone to “misalignment” or occlusion interruption over long distances, affecting continuous measurement. The “mutual reference” navigation positioning method resolves long-distance frequent suspension issues. The “mutual reference” mechanism operates in two modes: “Bolter Miner stationary” and “Bolt Transfer Unit stationary.”
Mode 1 (Bolter Miners moving, Bolt Transfer Units stationary): Bolt Transfer Unit guidance measurement devices serve as references, with the Bolter Miners calculating self-motion through pose measurement devices.
Mode 2 (Bolt Transfer Units moving, Bolter Miners stationary): Bolter Miner pose measurement devices become references, with Bolt Transfer Units obtaining self-motion through reverse calculation.
During long-distance excavation, alternating use of Bolt Transfer Units or Bolter Miners as references avoids dependence on external suspension positioning devices. When primary equipment switches, measurement links automatically reverse without additional “retreat” or “re-targeting,” significantly reducing “misalignment” recovery time.
Table 1 details the specific operational steps for the two working modes of “Mutual-Reference” navigation positioning (Bolter Miners moving/Bolt Transfer Units stationary and Bolt Transfer Units moving/Bolter Miners stationary).
The “mutual reference” navigation positioning method also resolves the problem of simultaneous positioning of both devices. The Bolt Transfer Unit guidance measurement device outputs relative bearing and distance to the Bolter Miners, while the Bolter Miner pose measurement device simultaneously outputs relative attitude and position to the Bolt Transfer Units. Both establish transformation matrices with the global tunnel coordinate system Fw, enabling direct conversion of relative measurement results from both machines to Fw, achieving system-wide synchronized positioning.
Theoretical description of the “mutual reference”
The “mutual reference” mechanism achieves high-precision collaborative positioning between Bolter Miners and Bolt Transfer Units through dynamic reference coordinate system switching. This section provides detailed derivations from three aspects: coordinate system definitions, mode calculation formulas, and collaborative logic.
(1) coordinate system definitions and transformation chain.
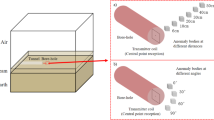
Figure 4 provides a schematic diagram of coordinate system definitions for rapid excavation system integrated navigation positioning, serving as the foundation for understanding subsequent coordinate transformation formulas.

Schematic of rapid excavation system integrated navigation positioning.
Table 2 clearly defines each coordinate system involved in Fig. 4 (Mine Drift Coordinate System Fw, Guidance Measurement Device Coordinate System Fc, Bolter Miner Body Frame Fr, Bolter Miner Body Frame Fs), including symbols, origin and axis definitions, as well as functional descriptions.
The system achieves coordinate mapping through homogeneous transformation matrices. Guidance measurement device installation calibration:
where \(\:{C}_{s}^{c}\) represents the rotation matrix from the Bolt Transfer Units to guidance measurement device, and \(\:{p}_{s}^{c}\) denotes the installation offset vector of guidance measurement device in the Bolt Transfer Unit coordinate system.
(2) Mode 1 Calculation.
When the Bolter Miners move while the Bolt Transfer Units remain stationary, input parameters include guidance measurement device light spot pixel coordinates \(\:\left({\mu\:}_{x},{\mu\:}_{y}\right)\) and Bolter Miner inertial navigation attitude angles \(\:{\varphi\:}_{r}={\left[{\psi\:}_{r},{\alpha\:}_{r},{\beta\:}_{r}\right]}^{T}\). Through PnP algorithm, the target pose \(\:{F}_{c}\) is resolved:
where \(\:{C}_{c}^{r}\) represents the target rotation matrix in guidance measurement device coordinate system. Combined with installation calibration matrix \(\:{T}_{s}^{c}\), mapping to the Bolt Transfer Unit coordinate system \(\:{F}_{s}\):
Finally, the Bolter Miner pose is transformed to tunnel coordinate system \(\:{F}_{w}\): \(\:{T}_{w}^{r}={T}_{w}^{s}\cdot\:{T}_{s}^{r}\). Pose matrix decomposition:
Position vector \(\:{p}_{w}^{r}\) calculation:
where \(\:{T}_{w}^{s}\) represents the initial pose matrix of the Bolt Transfer Units, known when stationary.
(3) Mode 2 Calculation.
When the Bolt Transfer Units move while the Bolter Miners remain stationary, the input parameters include guidance measurement device light spot pixel coordinates \(\:\left({\mu\:}_{x},{\mu\:}_{y}\right)\) and the Bolt Transfer Unit inertial navigation attitude angles \(\:{\varphi\:}_{s}={\left[{\psi\:}_{s},{\alpha\:}_{s},{\beta\:}_{s}\right]}^{T}\).
Through PnP algorithm, the target pose \(\:{T}_{c}^{r}\) in \(\:{F}_{c}\) is resolved. By utilizing the stationary Bolter Miner pose \(\:{T}_{w}^{r}\), the Bolt Transfer Unit pose is reverse-calculated:
Pose matrix decomposition:
Position vector \(\:{p}_{w}^{s}\) calculation:
(4) Collaborative logic and mode switching.
To ensure the timeliness and accuracy of mode switching during actual operations, this study establishes mode switching condition trigger thresholds: acceleration variation > 0.5 m/s² and displacement change rate > 0.1 m. Finally, wireless communication protocols transmit pose matrices \(\:{T}_{w}^{r}\) and \(\:{T}_{w}^{s}\) in real-time, whereas the NTP protocol ensures data synchronization error between devices < 10 ms.
Experimental design and results
To validate the feasibility of the INS + Vision integrated navigation technology principles, experiments were conducted in the experimental excavation transport tunnel of the Xiaojihan Coal Mine. The experiment employed an EJM340 Bolter Miner with supporting equipment, including guidance measurement devices, pose measurement devices, the Bolt Transfer Units, self-moving machine tails, and belt conveyors, with environmental dust concentrations ranging from 80 to 150 mg/m³. Such an environment of extremely high dust concentration can severely compromise the effectiveness of conventional combined visual positioning solutions.The measuring instrument is the guidance measurement device installed on Bolt Transfer Unit and the pose measurement device installed on Bolter Miner. Table 3 provides relevant system performance indicators.
The guidance measurement devices were installed at the top front of the Bolt Transfer Units, while pose measurement devices were mounted at the top rear of the Bolter Miners, with specific installation positions shown in Fig. 5.

Underground Experimental Installation. Figs. (a) and (d) are installation position diagrams of pose measurement devices, and figs. (b) and (c) are installation position diagrams of guidance measurement devices.
Prior to experimentation, guidance measurement devices and pose measurement devices were adjusted to the same height plane with their connection line aligned with the tunnel excavation direction. Default navigation-provided Bolt Transfer Unit and Bolter Miner coordinate data represent reference points under the Bolter Miner stationary and Bolt Transfer Unit stationary modes, respectively. The difference between the inertial navigation system output attitude angles and tunnel direction angles represents the Bolter Miners’ heading deviation relative to the tunnel coordinate system.
After normal operation of the rapid excavation system integrated navigation positioning system, according to the Bolter Miner position coordinates and attitude information provided by the system, the Bolter Miners were first driven to a test point approximately 3 m from the stationary Bolt Transfer Units to collect navigation-provided and field-measured Bolter Miner coordinate data. With the Bolter Miner stationary, the Bolt Transfer Units were subsequently driven to collect navigation-provided and field-measured Bolt Transfer Unit coordinate data. We conducted experiments on 12 points. Figures 6 and 7 illustrate the experimental recording points. Figure 8 schematically illustrates the overall layout of the underground experiment and the measurement method, including the relative positions of the equipment and the measurement reference.

Bolt transfer unit as a benchmark experimental recording point description.
At each distance point, find a reference point, record the coordinates output by the navigation system for that point, and make a mark on the ground at that point. Record the coordinates output by the navigation system for 12 different points and make marks on the ground at those points, as shown in the figure. Points 1 to 6 are on the left side, and points 7 to 12 are on the right side. Among them, points 3 to 6 and 9 to 12 have navigation positioning equipment headings basically aligned with the virtual alley direction. Points 1 and 7 are offset 7° to the left, and points 2 and 8 are offset 6° to the right.

Bolter miner as a benchmark experimental recording point description.
Record the coordinates output by the navigation system at 12 different points and mark them on the ground, as shown in the figure. Points 1 to 6 are on the left side, and points 7 to 12 are on the right side. Points 3 to 6 and 9 to 12 have their navigation positioning device headings basically aligned with the virtual alley direction.Points 1 and 7 are offset 5° to the left, and points 2 and 8 are offset 9° to the right.
Using Bolter Miner and Bolt Transfer Unit navigation and measured coordinates when unmoved as baselines, comparisons were made with positioning results under different experimental group conditions, with the results presented in Tables 4. and 5. The variables x and y represent directions along the tunnel width and tunnel excavation direction, respectively, whereas Δx and Δy represent positioning errors (differences between the measured and reference values) along the tunnel width and excavation directions, respectively.

Underground experimental schematic.
Figure 9 visually demonstrates the lateral (blue solid line) and longitudinal (red dashed line)positioning errors of the the Bolt Transfer Units (upper graph) and the the Bolter Miners (lower graph) across the entire measurement distance range, as well as their maximum extents.

Experimental results of positioning accuracy for rapid excavation system.
The Bolt Transfer Unit error plot (upper): the blue solid line represents the lateral positioning error (maximum range 34 mm), and the red dashed line represents the longitudinal positioning error (maximum range 66 mm).
The Bolter Miner error plot (lower): the blue solid line represents the lateral positioning error (maximum range 28 mm), and the red dashed line represents the longitudinal positioning error (maximum range 66 mm), with longitudinal error showing significant fluctuation in the 20–50 m distance range.
Figure 10 further analyzes the distribution characteristics and central tendency of positioning errors for the Bolt Transfer Units (red) and the Bolter Miners (blue) through error vector distribution ellipse charts, including the magnitude of the error vectors (points) as well as the joint distribution of lateral and longitudinal errors (ellipses).

Positioning error vector magnitude distribution.
The red ellipses and points represent the Bolt Transfer Unit error distribution. The blue ellipses and points represent the Bolter Miner error distribution. Each point represents the actual error vector magnitude \(\sqrt {(lat{\text{}}\: + \:long{\text{}})}\) at specific distances. The ellipses represent the error concentration trends (centered on the mean values, the horizontal axis represents the longitudinal error, and the vertical axis represents the lateral error).
The figure illustrates error vector magnitude distribution for both equipment types at different measurement points, with error ellipses providing intuitive representations of the error concentration trends. The Bolter Miner error distribution ellipse is smaller with concentrated data points and a lower average error magnitude (approximately 35.3 mm), while the Bolt Transfer Unit error magnitude shows greater fluctuations with a more dispersed distribution and a mean value of 43.7 mm, indicating stronger overall positioning accuracy dispersion. Ellipse bias also reflects differences in error characteristics between equipment types in the lateral and longitudinal directions.
Figure 11 shows the trend lines of horizontal and vertical absolute errors as a function of distance for the Bolt Transfer Units (upper graph) and the Bolter Miners (lower graph) after processing with a 5-point moving average, which helps in observing the systematic changes in error patterns.

Moving average of positioning errors.
Upper plot: Moving average curves of the Bolt Transfer Units’ lateral and longitudinal absolute errors at different distances.
Lower plot: Similar error curves for the Bolter Miners.
A sliding window (5-point) averaging was used to eliminate short-term fluctuations and reveal overall trends.
The figure presents the lateral and longitudinal error variation trends after the 5-point sliding average of the absolute error values. Bolt Transfer Unit errors exhibit significant fluctuation during distance progression, particularly after 30 m where lateral errors increase substantially, indicating systematic deviation. Conversely, the Bolter Miner error variation curves remain relatively stable, with both lateral and longitudinal errors being consistently maintained at low levels, demonstrating stronger stability of this equipment’s navigation system. The results indicate that “mutual reference” navigation structure application on Bolter Miners positively contributes to error convergence.
Continued calculations yielded confidence intervals for the sample.Bolt Transfer Units have a sample mean of 8.50 mm and a sample standard deviation of 20.94 mm for lateral deviation with a 95% confidence interval of [−4.81, 21.81] mm and a sample mean of −29.58 mm and a sample standard deviation of 24.25 mm for longitudinal deviation with a 95% confidence interval of [−44.99, −14.17] mm. The Bolter Miners have a sample mean of −16.42 mm and a sample standard deviation of 12.21 mm for the horizontal deviation with a 95% confidence interval of [−24.17, −8.66] mm and a sample mean of 21.25 mm and a sample standard deviation of 27.20 mm for the vertical deviation with a 95% confidence interval of [3.97, 38.53] mm.
The three categories of charts comprehensively demonstrate the precision performance and stability differences of the INS + Vision integrated navigation system in actual rapid excavation equipment. The Bolter Miners, which serve as positioning reference platforms, exhibit higher reliability and accuracy under fusion algorithm constraints, while the Bolt Transfer Units show slightly weaker error control compared to Bolter Miners due to factors including inertial navigation drift and visual environment interference. Future research should further improve backend error compensation mechanisms to enhance overall collaborative navigation system capabilities.
The experimental results demonstrate that the maximum lateral positioning error range for the Bolt Transfer Units is 34 mm with a maximum longitudinal positioning error range of 66 mm, whereas the Bolter Miners achieve a maximum lateral positioning error range of 28 mm and a maximum longitudinal positioning error range of 66 mm. These results satisfy underground positioning requirements for both Bolter Miners and Bolt Transfer Units.They demonstrate that the design proposed herein is suitable for high-dust environments that impact conventional casing operations. Therefore, the proposed integrated navigation-based precise positioning method for rapid excavation systems demonstrates feasibility and achieves the expected performance.
Conclusions
This study proposes an INS + Vision integrated navigation positioning scheme, establishing a collaborative navigation structure with Bolter Miners and Bolt Transfer Units serving as “mutual references.” Under conditions where the Bolter Miners move while the Bolt Transfer Units remain stationary, the Bolt Transfer Unit vision-inertial system serves as the reference for calculating the Bolter Miner pose. Conversely, when the Bolt Transfer Units move while the Bolter Miners remain stationary, the Bolter Miner pose information serves as the reference for reverse positioning of the Bolt Transfer Units. Through bidirectional dynamic switching mechanisms, this method achieves high-robustness continuous measurement and stable positioning between equipment, effectively addressing the technical bottlenecks of multiequipment collaborative navigation and positioning in rapid excavation systems.
Through collaborative navigation experiments conducted with Bolter Miners and Bolt Transfer Units in typical underground working faces, the results demonstrate that under unobstructed line-of-sight conditions, the maximum lateral positioning error range for Bolt Transfer Units is 34 mm with a maximum longitudinal positioning error range of 66 mm, whereas the Bolter Miners achieve a maximum lateral positioning error range of 28 mm and a maximum longitudinal positioning error range of 66 mm. The overall positioning accuracy satisfies underground excavation operation requirements. Experimental validation confirms the accuracy and feasibility of this scheme, providing technical support for high-precision positioning of rapid excavation systems in complex tunnel environments.
Data availability
All data generated or analysed during this study are included in this published article.
References
Liu, X., Li, L. & Yang, Y. Development status of coal mining in China. J. South Afr. Inst. Min. Metall. 123 (1), 19–28 (2023).
Wang, G. F. et al. Smart coal mine 2025: scenario objectives and development path. J. China Coal Soc. 43 (2), 295–305 (2018).
Wang, G. F. Latest technological advances and issues in intelligent coal mining. Coal Sci. Technol. 50 (1), 1–27 (2022).
Tian, W. Q. et al. Current research status and development trend of navigation technology for cantilever-type roadheaders. Coal Sci. Technol. 50 (3), 267–274 (2022).
Yang, X. et al. An analysis of digging anchor machine stability and track wear under digging conditions. Sci. Rep. 12 (1), 17738 (2022).
Xie, G. Research on rapid excavation technology of integrated coal roadway excavation and bolting machine. Coal 32 (5), 73–76 (2023).
Fan, J. Development and technical advantages of integrated excavation and bolting machine. Energy Technol. 21 (3), 24–26 (2023).
Zhang, S. P. Research on rapid excavation technology of integrated excavation and bolting machine. Mach. Manage. Dev. 37 (10), 201–203 (2022).
Zhang, T. Research on navigation and positioning and automatic cutting method of cantilever roadheader. Coal Mine Mach. 45 (9), 33–35 (2024).
Wang, B. L. Discussion on intelligent excavation of cantilever roadheader. Coal Mine Mach. 43 (5), 83–85 (2022).
Qin, Y. B. Research on automatic cutting technology of cantilever roadheader. Coal Mine Mach. 44 (12), 52–55 (2023).
Xu, C. Research on positioning technology of coal mine roadheader [煤矿掘进机定位技术研究]. Coal Mine Mach. 43 (8), 34–36 (2022).
Tian, Y. Current status and development direction of navigation technology for cantilever roadheader. Ind. Mine Autom. 43 (8), 37–43 (2017).
Chen, S. J. et al. Error analysis of autonomous calibration method based on roadheader pose measurement system. J. China Coal Soc. 43 (9), 285–290 (2018).
Li, M. G. et al. UWB-based localization system aided with inertial sensor for underground coal mine applications. IEEE Sens. J. 20 (12), 6652–6669 (2020).
Han, S. et al. An orientation navigation approach based on INS and odometer integration for underground unmanned excavating machine. IEEE Trans. Veh. Technol. 69 (10), 10772–10786 (2020).
Wang, H. R. et al. Combined positioning method of roadheader based on strapdown inertial navigation and differential odometer. Ind. Mine Autom. 48 (9), 148–156 (2022).
Liu, S. Y. et al. Multi-sensor fusion positioning system and experimental study for tunnel roadheader. J. Vib. Meas. Diagnosis. 43 (3), 476–484 (2023).
Zhang, X. H. et al. Combination positioning method of roadheader using total station and strapdown inertial navigation. Ind. Mine Autom. 46 (9), 1–7 (2020).
Wang, J. J., Tong, M. M. & Liu, B. Research on integrated navigation positioning system. Software 32 (5), 82–84 (2011).
Li, C., Zhang, H., Xu, Y., Chen, X. & Wang, J. High-precision map construction in degraded long-tunnel subway environments using LiDAR–IMU integration. Remote Sens. 16 (3), 512 (2024).
Trybała, P., Janicka, J., Wróblewski, Ł. & Bakuła, K. Comparison of low-cost handheld LiDAR-based mobile mapping systems in a challenging underground tunnel. Int. Archives Photogrammetry Remote Sens. Spat. Inform. Sci. XLVIII-1/W2-2023, 427–434 (2023).
Koval, A., Kanellakis, C. & Nikolakopoulos, G. Evaluation of Lidar-based 3D SLAM algorithms in subt environment. IFAC-PapersOnLine 55 (38), 126–131 (2022).
Yang, W. et al. Infrared LEDs-based pose Estimation with underground camera model for boom-type roadheader in coal mining. IEEE Access. 7, 33698–33712 (2019).
Lei, M. Y. et al. Research status and trends of visual pose detection and control for coal mine excavation equipment. J. China Coal Soc. 46 (S2), 1135–1148 (2021).
Huang, D. et al. Real-time pose measurement method of roadheader based on vision/inertial navigation. Laser Technol. 41 (1), 19–23 (2017).
Cui, Y. M. Key technologies of vision/inertial fusion autonomous positioning for coal mine tunnel roadheader. China University of Mining and Technology, [Doctoral dissertation]. (2021).
Cui, Y. et al. Navigation and positioning technology in underground coal mines and tunnels: A review. J. South Afr. Inst. Min. Metall. 121 (6), 295–303 (2021).
Fan, Z. et al. Deep learning on monocular object pose detection and tracking: A comprehensive overview. ACM Comput. Surveys. 55 (4), 1–40 (2022).
Huang, Z. et al. Research on the intelligent system architecture and control strategy of mining robot crowds. Energies 17 (8), 1834 (2024).
Tian, Y. Research on automatic positioning method of roadheader based on four-point optical target. Coal Sci. Technol. 46 (12), 35–40 (2018).
Li, D. P. & Yang, B. High-precision spot center localization algorithm. Opt. Instruments. 40 (4), 20–25 (2018).
Author information
Authors and Affiliations
Contributions
Hongda Zhu: Conceptualization, Methodology, Writing Original Draft. Yuang Zhao: Writing, Editing. Yunlin Zhou: Paper format modification. Zihan Jin: Project administration. Yaqiang Wei: Formal analysis. Sihai Zhao: Resources.
Corresponding author
Ethics declarations
Competing interests
The authors declare no competing interests.
Additional information
Publisher’s note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution-NonCommercial-NoDerivatives 4.0 International License, which permits any non-commercial use, sharing, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if you modified the licensed material. You do not have permission under this licence to share adapted material derived from this article or parts of it. The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by-nc-nd/4.0/.
About this article

Cite this article
Zhu, H., Zhao, Y., Zhou, Y. et al. Research on a precise positioning method of rapid excavation systems based on integrated navigation. Sci Rep 15, 45253 (2025). https://doi.org/10.1038/s41598-025-29438-9
Received:
Accepted:
Published:
Version of record:
DOI: https://doi.org/10.1038/s41598-025-29438-9
