
Abstract
With the promotion and application of electric vehicles, the effects of low-temperature working conditions on the range of electric vehicles have attracted great attention in academic research. However, the effect and mechanism of tire rolling resistance on the energy consumption of electric vehicles under low-temperature working conditions have not been comprehensively investigated. In this research, 235/50R19 radial tires were used as the research object, and HyperMesh and Abaqus software were used for preprocessing and postprocessing, respectively. To validate the finite element model and its rolling resistance predictions, steady-state rolling simulations were performed under two sets of conditions. First, the tire was simulated on an asphalt road at − 20 °C at ten different speeds: 30, 40, 50, 60, 70, 80, 90, 100, 110, and 120 km/h. Second, simulations were conducted at a constant speed of 80 km/h under four ambient temperatures: 0, − 10, − 20, and − 30 °C. The effect of tire rolling resistance on the energy consumption of electric vehicles was determined by calculating the energy loss. The results revealed that at an ambient temperature of − 20 °C, an increase in the driving speed increased the proportion of tire rolling resistance energy consumption. At a driving speed of 80 km/h, as the temperature continued to decrease, the proportion of tire rolling resistance energy consumption increased. For every 10 km/h reduction in the driving speed, the average decrease in the driving range increased by 1.5%, and for every 10 °C decrease in the ambient temperature, the average range loss increased by 2.3%.
Similar content being viewed by others


Introduction
With the acceleration of the global energy transition and promotion of carbon neutrality goals, electric vehicles have attracted increased attention as important carriers of clean travel because of their technical performance and energy efficiency. However, the significant influence of low-temperature environments on the endurance of electric vehicles has become a key bottleneck restricting their large-scale promotion, with the increase in tire rolling resistance and energy consumption due to the coupling effect of multiple working conditions among the main reasons.
Scholars in China and abroad have conducted a considerable amount of research on this topic. Zhu et al.1,2 introduced a rolling resistance characteristic evaluation method based on tire testing, which used experimental testing of the damping ratios of different tires and investigated their rolling resistance characteristics. Nie et al.3 performed experimental tests to evaluate the influences of inflation pressure, speed, load, tread patterns and tread rubber processing properties on tire rolling resistance. Bao4 conducted green tire rolling resistance performance analyses to investigate the factors influencing tire rolling resistance. Wang et al.5 explored contact characteristics between the tread and tire body as well as their influences on tire rolling resistance. Aboulyazid et al.6 provided a theoretical basis for investigating tire rolling resistance by evaluating the geometric shape of noninflatable off-road vehicle tire spokes. Chen et al.7 developed a theoretical basis to explore radial tire rolling resistance by studying the effect of moisture-resistant resin on tread performance. Sailaja et al.8 provided a better balance between tire rolling resistance and grip performance by analysing fillers. Mazur9 used a dual-drum test platform to determine the rolling resistance of nonpneumatic tires and derived theoretical equations from a dynamometer. Park et al.10 developed a finite element analysis method for the tire crown layer and rolling resistance, providing a theoretical basis for the investigation of tire rolling resistance. Ding et al.11 modelled tire-deformed pavement interactions and evaluated tire rolling resistance. Sharma et al.12 studied the influence of tire surface texture by establishing a multiphysics model of tire–road contact. Liu13 analysed the thermal coupling finite element method for nonpneumatic tires and determined the rolling resistance and temperature rise of tires. Zhou et al.14 explored the constitutive model of nonlinear viscoelastic tires and investigated the rolling and heat generation of tires. Hyttinen et al.15 applied a hot tire model with variable speed and thermal inertia to simulate and calculate the tire temperature. They applied the time temperature superposition principle to calculate rolling resistance and obtained the main variation curves of rolling resistance and tire temperature at various speeds. Yu16 revealed a contradictory mechanism between rolling resistance and grip performance in terms of tire surface deformation and calculated tire rolling resistance by extracting the stress and strain of elements during steady-state free rolling.
These researchers have extensively studied tire rolling resistance, but no research has evaluated the effects of tire rolling resistance on the energy consumption of electric vehicles in low-temperature environments. Owing to the significantly lower range of electric vehicles in the winter than in the other seasons, accurate investigations of tire rolling resistance at low temperatures are particularly important.
To evaluate the effect of tire rolling resistance on electric vehicle energy consumption at low temperatures, 235/50R19 radial tires were used as the research object, and (https://altair.com.cn/altair-hyperworks, HyperMesh2022) HyperMesh17 and (https://www.3ds.com/zh-hans/products/simulia/abaqus, Abaqus2023) Abaqus18 software were used for preprocessing and postprocessing, respectively. The steady-state rolling of tires at 10 different driving speeds of 30, 40, 50, 60, 70, 80, 90, 100, 110 and 120 km/h on asphalt pavement at the ambient temperature of − 20 °C was simulated. The energy consumption generated by tire rolling resistance was calculated by summing the unit strain energy density and unit energy loss, and the impact of tire rolling resistance on the energy consumption of electric vehicles was obtained on the basis of the energy consumption per kilometre of the vehicle. This provides a theoretical basis for improving the endurance of electric vehicles in cold environments.
Finite element model development
Construction of the tire model
In this study, HyperMesh software was applied to develop a geometric model with C3D8RT hexahedral mesh elements as the main element type and S4RT tetrahedral elements as auxiliary elements. C3D8RT is an eight-node, three-dimensional hexahedral element in Abaqus that is specifically designed for fully coupled thermal-stress analysis. Unlike standard stress elements, C3D8RT incorporates an additional degree of freedom for temperature at each node, enabling the simultaneous solution of mechanical deformation and related thermal effects such as heat generation and transfer. This capability is crucial for modelling processes such as tire rolling, where cyclic deformation generates heat and subsequently influences material properties. The element employs reduced integration (“R”) to enhance the computational efficiency and mitigate mesh locking, although control of potential hourglassing modes is necessary. Consequently, C3D8RT is ideally suited for modelling complex problems involving thermomechanical energy conversion, such as heat buildup in rubber compounds or metal forming processes. Conversely, the S4RT is a 4-node shell element that combines reduced integration with temperature capabilities, using finite film strain shell theory to approximate the structure through its mid-surface while neglecting thickness-direction stresses, which optimizes performance in thin-walled geometries subjected to thermal gradients and membrane-dominated responses. These units thus offer distinct advantages for multiphysics simulations, where C3D8RT excels in full 3D continuum analysis and S4RT provides reduced-dimensional solutions for lightweight, heat-sensitive assemblies19.
The cross-sectional block of the test tire is shown in Fig. 1, and the finite element model constructed for the tire with 99,600 elements and 117,003 nodes is shown in Fig. 2. RP-1 is the centre point of the tire and the load application point (In Abaqus, it is used for the reference point (RP)). By coupling RP-1 with the contact part of the wheel rim, acceleration was applied to RP-1 to simulate the rolling speed of the tire. An inflation pressure of 250 kPa and a vertical load of 5 kN were applied to the model, specifically to the reference point RP-1. To simulate steady-state rolling at the abovementioned driving speeds, the developed ground model used asphalt pavement with a temperature load of – 20 °C.

Sectional block of test tire.

The finite element model for the tire.
Material properties
The Mooney–Rivlin model was used to define the constitutive behaviour of the tire rubber, whose material parameters are provided in Table 1. Table 2 presents the properties of the belt layer, carcass, bead wire, and ground material20.
Finally, the thermal expansion coefficient, thermal conductivity, and specific heat coefficient of materials such as the belt layer and inner lining layer are presented in Table 321.
Finite element simulation
The tire was located at the centre of the ground X–Z plane, a tire ground contact model was developed using surface-to-surface contact, and the contact relationship between the tire and ground was defined using a penalty function. A series of thermal loads at 0, − 10, − 20, and − 30 °C were applied to the model, and simulations were conducted across a range of tire rotational speeds from 30 to 120 km/h. The rolling process of the entire tire on the ground was defined using a power display analysis step, and the resulting variables, such as stress, strain, and heat, were set as the process and field outputs. After unit grid division was completed, the model was solved using the Abaqus solver, and the strain energy density of the elements was obtained by establishing a display group set of result variables.
Assumption of boundary conditions
This research focused mainly on the impact of tire rolling resistance on the energy consumption of electric vehicles under low-temperature and low-speed conditions. To restrict the influences of other factors on the obtained results, the following assumptions were made:
-
1.
The tire pressure remained constant at 250 kPa. Although the tire pressure changes over time during vehicle operation, which in turn influences the tire rolling resistance, a constant tire pressure of 250 kPa was maintained in this research to avoid uncertainty.
-
2.
The tire load was kept constant at 5 kN. To avoid variations in the load affecting the tire rolling resistance, this research kept the tire load constant at 5 kN.
-
3.
The road surface was levelled. To limit the influences of uneven and tortuous road conditions on the simulation results, the road surface in this study was levelled (flattened rather than smoothed so that friction effects were still preserved).
Experimental validation of the finite element model
Analysis of the tire contact patch
Experimental objective
A professional press was used to apply 5 different vertical loads of 2, 3, 4, 4.5 and 5 kN to a tire with a tire pressure of 250 kPa, and the tire radial variations were measured. The contact area of the tire under a vertical load of 5 kN was measured and compared with the simulation results to verify the effectiveness of the developed finite element model.
Testing system
The testing system principles and onsite installation of the testing system are shown in Figs. 3 and 4, respectively. When the press applied a vertical load to the tire, a force and reaction relationship existed between the tire and worktable. Therefore, carbon paper and white paper were placed on the worktable at the bottom of the tire, and a steel ruler was placed on the right side of the tire to measure the changes in the radius of the tire in real time.

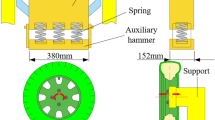
Testing system principle. (1) Pressure gauge. (2) Pressure relief spring. (3) Hydraulic rod. (4) Pad plate. (5) Workbench adjustment hole. (6) Workbench. (7) Workbench. (8) Column. (9) Base bracket. (10) Hydraulic oil discharge port. (11) Pressure relief valve. (12) Hydraulic oil filling port. (13) Pressure rod. (14) High pressure oil pipe. (15) Steel ruler.

On-site installation of testing system.
Experimental conclusion
The experimental and simulation results obtained for the tire radial deflection are summarized in Table 4. According to the table, by increasing the load from 2 to 5 kN, the tire radial deflection significantly increased by 14.8 mm. When the load was increased from 3 to 4 kN, the change rate of the tire radial deflection reached its peak, corresponding to an increase of 6.5 mm. The maximum error between the subsidence values obtained by the experiments and simulations was 2.6%.
The ground contact marks under 250 kPa actual tire pressure and a 5 kN load are shown in Fig. 5, and those under 250 kPa simulated tire pressure and a 5 kN load are shown in Fig. 6. These figures show that the measured tire grounding imprint was roughly rectangular in shape. Through measurement and calculation, the imprint area was found to be approximately 17,188 mm2; the simulated contact patch exhibited a quasirectangular shape, with a maximum area of approximately 17,266 mm2. This result strongly agreed with the experimental measurements, with a minor deviation of only 78 mm2, corresponding to an error of 0.45%. Therefore, the established finite element model was proven to be reasonable.

Actual tire ground contact imprint

Simulated tire ground contact imprint.
Tire rolling resistance test
Experimental purpose
The driving state of a vehicle under controlled conditions was simulated, the rolling resistance of tires at specific temperatures, road surfaces, and speeds was accurately measured, and the rolling resistance coefficient was calculated. A low-temperature environment was simulated through an indoor refrigeration unit, and a blower was used to simulate the wind resistance of a car. The experimental results were compared with the corresponding simulation results to verify the accuracy of the simulation results.
Testing system
The testing system consisted of a BYD Song PLUS EV vehicle, refrigeration unit, blower, chassis dynamometer, operation console and other components. The principle of the tire rolling resistance testing system is illustrated in Fig. 7. The prepared test vehicle was towed onto the chassis dynamometer. The refrigeration unit was then activated to cool the environment to the target temperature, and a blower was started to simulate aerodynamic drag. Once the experiment commenced, the data were acquired from the display interface of the control console.

Principle of the tire rolling resistance testing system. (1) Refrigerator. (2) Blower. (3) Console. (4) Chassis dynamometer. (5) A BYD Song PLUS EV vehicle.
Experimental results
The experimental and simulation results of the tire rolling resistance are summarized in Table 5. When the speed was increased from 30 to 70 km/h, the tire rolling resistance significantly increased by 58.47 N. When the speed was increased from 40 to 50 km/h, the increase in the tire rolling resistance was relatively small, which was consistent with the characteristic relatively gentle growth of the tire rolling resistance in the medium-speed range. The maximum error between the tire rolling resistance values obtained through experiments and simulations was 3.3% (please refer to “Proportion of tire rolling resistance energy consumptionat different temperatures” below for details).
Therefore, the established finite element model was proven to be reasonable.
Tire rolling resistance calculation principle
The finite element model was divided into 67 tire segments according to angles, and one-sixty-seventh of the tire finite element model is illustrated in Fig. 8. The figure shows that the mesh integrity of the tire finite element model was still preserved after the partition block operations were performed. Owing to the uniform partitioning strategy, the rubber material units in each part could be accurately mapped to the corresponding rubber material units in the corresponding part on the basis of their sequence positions. This mapping mechanism optimized the calculation process for the cumulative strain energy density of rubber material units, improving the efficiency and accuracy of the calculation.

One of the 67 segments of the tire finite element model.
A mapping mechanism was applied to subtract the strain energy density of rubber material units at the same position in each part; that is, the cumulative strain energy density was
where e is the unit strain energy density, J/mm3; n is tire block number; and i is tire block unit position number.
The total energy loss was equal to the work done by the rolling resistance, but owing to possible simplifications in the model, the rolling resistance calculation considered the average radius of each element. The energy loss of each rubber material unit was calculated as follows:
where \(h_{i}\) is the energy loss of the rubber material unit, J; k is the number of tire segments, pieces; and \({\delta _{i} }\) is the tangent value of material loss for rubber material unit number i.
The rolling resistance of the tire was expressed as22,23
where R is the tire rolling resistance, N; m is the total number of rubber material units, pieces; r is the longitudinal section ring radius of the tire where the rubber material unit i is located, mm; and \(V_{i}\) is the volume of the rubber material unit i, which rotates once with a radius of r, mm3.
The rolling resistance coefficient of tire f was obtained as24,26
where \(F_{v}\) is the vertical load on the tire, N.
The proportion of energy consumption per kilometre of rolling resistance was expressed as follows:
where q is the proportion of energy consumption per kilometre of rolling resistance, %; and Q is the total energy consumed per kilometre of electric vehicle travel, J.
In this research, a certain model of an electric vehicle was taken as an example. The data on the official website showed that the battery capacity was 258.48 × 106 J, the driving range was 520 km, and the average consumption per kilometre was 4.97 × 105 J. The rolling resistance of tires at low temperatures reduced the range of electric vehicles to
where S is the reduced mileage of electric vehicles; h is the measurement coefficient; and g is the total energy consumption of electric vehicles.
The cumulative strain energy density \(\:\varDelta\:\) of the rubber material units was calculated using Eq. (1), the energy loss \(h_{i}\) of each rubber material unit was obtained through Eq. (2), the tire rolling resistance R and the tire rolling resistance coefficient f were determined through Eqs. (3) and (4), respectively, the energy consumption ratio q of the tire rolling resistance per kilometre was calculated by Eq. (5), and the electric vehicle range loss S was obtained by Eq. (6).
Calculation of tire rolling resistance
Simulation of tire rolling resistance
The maximum steady-state rolling strain energy density among all the elements of the tire is shown in Fig. 9. To demonstrate the repeatability of the finite element experiments and the feasibility of modifying multiple boundary conditions, Fig. 9 presents the steady-state rolling strain energy density contours for the tire under all investigated operating conditions. In Abaqus result analysis, SNEG (shell negative) represents the negative normal surface of shell or membrane units and is a key identifier for defining unit orientation and positioning reference surfaces; SENER represents the strain energy density ‘fraction’ and usually refers to the volume fraction, which is a key parameter in modelling multiphase materials (such as composite materials with voids and mixtures) and is used to describe the proportion of a volume of the phase to the entire material volume; and Avg (average threshold) is a key parameter that controls the degree of averaging of node results. In Abaqus, SENER is used for the output variable code representing strain energy density.
According to the figure, the rubber material unit, which was compressed because of tire rolling, had the highest strain energy density. At driving speeds of 30, 40, 50, 60, 70, 80, 90, 100, 110 and 120 km/h, the maximum strain energy densities of the rubber material unit were 0.19, 3.14, 6.80, 2.00, 7.54, 7.31, 6.41, 7.83, 22.20 and 36.02 J/mm3, respectively. As the tire continued to roll, the compressed rubber material unit was restored to its original state by elastic action, and the strain energy density tended to stabilize.

Steady-state rolling strain energy density of the tire. (a) 30 km/h, (b) 40 km/h, (c) 50 km/h, (d) 60 km/h, (e) 70 km/h, (f) 80 km/h, (g) 90 km/h, (h) 100 km/h, (i) 110 km/h, (j) 120 km/h.
As the tire rolled, the rubber material unit began to be subjected to tension and compression, and the strain energy density of the unit changed accordingly. The variations in the strain energy density of the rubber sample unit are shown in Fig. 10. As shown in the figure, as the tire rolled, the strain energy density of the rubber material fluctuated. Within the time range of 0 to 0.15 s, the tire began to roll. Owing to the significant deformation generated when the tire came into contact with the ground, the strain energy density of the rubber material sample unit rapidly increased to a peak value. From 0.15 to 0.20 s, the strain energy density sharply decreased, indicating that the sample unit moved from the bottom to other positions as the tire rolled after the end of compression. From 0.20 to 0.25 s, the strain energy density first slightly increased but then slightly decreased. This might be because the tire gradually adapted to the shape of the ground and reduced deformation. From 0.25 to 0.30 s, the strain energy density slowly increased and reached its maximum value at 0.35 s and then continued to increase until 0.45 s. Although fluctuations occurred during this period, the elemental strain energy density remained near the highest peak overall, indicating that the tire had essentially completed the process of adapting to the terrain.

Variations of the strain energy density of the rubber sample unit.
The strain energy density variation curve of the rubber sample unit under 10 different driving speeds is shown in Fig. 11. As shown in the figure, with increasing driving speed, the strain energy density of the sample unit also increased. In the speed range of 30 to 60 km/h, the change rate of the strain energy density of the sample unit was relatively large. With increasing speed from 60 to 100 km/h, the change rate of the strain energy density of the sample unit tended to be stable. With a further increase in speed from 100 to 120 km/h, the change rate of the strain energy density of the sample unit was the greatest. When the speed was between 30 and 60 km/h, the tire experienced strain because the effect of the ground during steady-state rolling and strain continuously increased with increasing driving speed. In the speed range of 60 to 100 km/h, the tire had adapted to the ground during steady-state rolling, and the strain energy density of the sample unit tended to stabilize. In the 100 to 120 km/h speed range, excessive driving speed increased tire deformation during rolling, and the strain energy density of the sample unit also increased sharply.

Strain energy density variation curve of the rubber material sample units at different speeds.
Proportion of tire rolling resistance energy consumption at different driving speeds
The energy loss of a tire steadily rolling for one cycle at 10 different driving speeds on a – 20 °C asphalt road surface obtained using Eqs. (1) and (2) is shown in Fig. 12. The figure shows that increasing the driving speed increased energy consumption per tire rolling cycle. At 30, 40, 50, 60, 70, 80, 90, 100, 110 and 120 km/h, the energy consumption was 44.66, 57.37, 57.85, 63.00, 66.42, 78.43, 83.16, 87.89, 96.41 and 112.58 J, respectively. As the driving speed continued to increase, the energy consumed by each tire roll significantly increased.

Energy loss of a tire steadily rolling for one cycle at different speeds.
The tire rolling resistance on a – 20 °C asphalt pavement at 10 different driving speeds obtained from Eq. (3) is shown in Fig. 13. As shown in the figure, increasing the tire driving speed increased the tire rolling resistance. With increasing speed from 100 to 120 km/h, the rate of increase of tire rolling resistance was the highest, with a peak value of 62 N.

Rolling resistance of tires at different speeds.
The energy consumption caused by tire rolling resistance on a – 20 °C asphalt pavement at 10 different driving speeds obtained from Eqs. (4) and (5) is shown in Fig. 14. As shown in the figure, increasing the driving speed increased the tire rolling resistance and the proportion of tire rolling resistance energy consumption. As the speed increased from 100 to 120 km/h, the rate of increase of tire rolling resistance energy consumption was the highest, with a maximum increase of 5.78%.

Energy consumption caused by tire rolling resistance at different speeds.
The increase in tire rolling energy consumption with increasing speed was due to a nonlinear increase in the rolling resistance coefficient with increasing speed and the force velocity product effect of power. This phenomenon was especially significant at high speeds and had strong effects.
Proportion of tire rolling resistance energy consumption at different temperatures
The energy consumption generated by the tire travelling at a speed of 80 km/h on asphalt pavement at four different environmental temperatures obtained from Eqs. (1) and (2) is shown in Fig. 15. As shown in the figure, a decrease in temperature continuously increased the energy consumption of a tire rolling for one week. When the temperature was 0 °C, the energy consumption of a tire rolling for one week was the lowest, with a minimum value of 68 J. At − 30 °C, however, the energy consumption of a tire rolling for one week was the highest, with a maximum value of approximately 105 J. In the temperature range of − 20 to − 30 °C, the energy consumption growth rate was the highest.

Energy consumption generated by the tire traveling at different temperatures.
The rolling resistance generated by the tire travelling at a speed of 80 km/h on asphalt pavement under 4 different environmental temperatures obtained from Eq. (3) is shown in Fig. 16. As shown in the figure, a decrease in temperature continuously increased the rolling resistance of the tire. At 0 °C, the rolling resistance of the tire was the lowest, with a minimum value of 169 N, and at – 30 °C, the rolling resistance of the tire was the highest, with a maximum value of 261 N. In the temperature range of − 20 to – 30 °C, the rate of increase of tire rolling resistance was the highest.

Rolling resistance generated by the tire traveling at different temperatures.
The energy consumption due to the rolling resistance of tires travelling at a speed of 80 km/h on asphalt roads under 4 different environmental temperatures obtained from Eqs. (4) and (5) is shown in Fig. 17. As shown in the figure, a decrease in temperature increased the proportion of tire rolling resistance energy consumption. At 0 °C, the proportion of tire rolling resistance energy consumption was the lowest, with a value of 24.23%, and at − 30 °C, the proportion of tire rolling resistance energy consumption was the highest, with a maximum value of 37.35%. In the temperature range of − 20 to − 30 °C, the proportion of tire rolling resistance energy consumption increased at the highest rate.

Energy consumption caused by rolling resistance of tires traveling at different temperatures.
Tire rolling energy consumption increased with decreasing temperature, which was due to the temperature sensitivity of rubber viscoelasticity hysteresis loss (low temperature exacerbated energy dissipation) and additional deformation caused by a decrease in tire pressure (if not replenished in time).
This phenomenon is especially significant in cold regions and is among the important reasons for the shortened range of electric vehicles and increased fuel consumption of fuel vehicles in winter.
Proportion of tire rolling resistance energy consumption at different temperatures and speeds
As described above, with continuous changes in speed and temperature, the energy consumption of tire rolling resistance also changes. The conversion of the tire rolling resistance energy consumption to electric vehicle mileage under normal conditions calculated using Eq. (9) for 10 different driving speeds on a − 20 °C asphalt pavement is presented in Table 6. The energy consumption due to tire rolling resistance while driving at a speed of 80 km/h on asphalt pavement at 4 different environmental temperatures under normal conditions was converted to electric vehicle mileage, and the obtained results are summarized in Table 7.
According to Tables 6 and 7, when the ambient temperature was − 20 °C, the range loss of electric vehicles increased with increasing driving speed. When the speed was 120 km/h, the maximum range loss was 118.44 km, which accounted for 22.78% of the normal driving range; at a driving speed of 80 km/h, the electric vehicle range loss increased with decreasing ambient temperature. When the ambient temperature was − 30 °C, the range loss was the greatest, reaching a maximum value of 104.58 km and accounting for 20.11% of the normal driving range.
The proportion of range loss of electric vehicles at different speeds and temperatures is shown in Fig. 18. As shown in the figure, when the ambient temperature was − 20 °C and the driving speed was 30 km/h, the range loss was 44.69 km. For every 10 km/h increase in speed, the average range loss increased by approximately 8 km, accounting for approximately 1.5% of the normal driving range. At a driving speed of 80 km/h and an ambient temperature of 0 °C, the range loss was 68.84 km. For every 10 °C decrease in ambient temperature, the average range loss increased by 11.9 km, accounting for approximately 2.3% of the normal driving range.

Proportion of range loss of electric vehicles at different speeds and temperatures.
On the basis of the above findings, one could conclude that the energy consumption fluctuation ranges of different electric vehicle models under assumed conditions were in the range of 10–15%. Therefore, on the basis of the findings of this study, the primary objectives in the design of tires for cold regions should be low rolling resistance and enhanced low-temperature resistance. A new rubber formula has been adopted to decrease low-temperature hardening and reduce basic rolling resistance. In addition, rolling resistance during high-speed driving was decreased through appropriate tread patterns and structural designs, thereby decreasing the range loss caused by increased speed and improving the range performance of electric vehicles in low-temperature environments.
Conclusion
-
(1)
In this research, a professional press was used to apply vertical loads to the tire, and the accuracy of the developed tire finite element model was verified by comparing the tire sinking and contact area. Tire rolling resistance was measured using a tire rolling resistance experimental testing system, and the effectiveness of the tire rolling resistance simulation results was verified by comparing the experimental and simulation results.
-
(2)
When the boundary condition assumption was valid, i.e., ignoring the influences of factors such as the tire pressure, load, and road surface flatness on the tire rolling resistance, a – 20 °C asphalt pavement was considered. At 10 different driving speeds of 30, 40, 50, 60, 70, 80, 90, 100, 110 and 120 km/h, tire rolling resistance and the proportion of tire rolling resistance energy consumption increased with increasing driving speed. In the speed range of 100–120 km/h, the rate of increase of tire rolling resistance and proportion of energy consumption of tire rolling resistance were the greatest.
-
(3)
When the boundary condition assumption held, i.e., ignoring the influences of factors such as tire pressure, load, and road surface flatness on tire rolling resistance, and under four different environmental temperatures of 0, − 10, − 20, and – 30 °C, when a tire travelled at a speed of 80 km/h on an asphalt road surface, tire rolling resistance and the proportion of energy consumption due to tire rolling resistance increased with decreasing temperature. In the temperature range of − 20 to − 30 °C, the rate of increase of tire rolling resistance and proportion of tire rolling resistance energy consumption were the highest.
-
(4)
Under the assumed conditions, when the ambient temperature was − 20 °C, the range loss increased with increasing speed. For every 10 km/h increase in the average driving speed, the range loss increased by 1.5%. At a driving speed of 80 km/h, the range loss increased with decreasing ambient temperature. For every 10 °C decrease in the average ambient temperature, the range loss increased by 2.3%.
-
(5)
The results of this research provide a theoretical reference for broader tire models and vehicle research, but shortcomings still exist. If a nonlinear tire model (considering factors such as tire pressure) and coupled environmental variables (temperature + humidity + wind speed) were introduced, the loss rate prediction accuracy could be improved by 5–15%. To avoid the influences of factors such as tire pressure and tire load, this research made specific assumptions such as constant tire pressure, constant load, and flat road surface. In future research, we will further improve the working conditions and consider the effect of electric vehicle tire rolling resistance on energy consumption when multiple factors coexist.
Data availability
The dataests used and/or analysed during the current study available from the corresponding author on reasonable request.
References
Zhu Chengwei, L. et al. Rolling resistance characteristics evaluation method based on simple tire test modal test. Trans. Chin. Soc. Agric. Mach. 50 (06), 371–378 (2019).
Zhang Chenxi, Z. et al. Stiffness analysis of a new type of non inflatable tire with Pseudo rigid flexible coupling. China Mech. Eng. 32 (09), 1051–10601072 (2021).
Nie Benliang, M. & Chengcheng, Y. Analysis of the influence of driving conditions on rolling resistance of all steel radial tires. Tire Ind. 43 (06), 380–383 (2023).
Bao, C. Analysis of Rolling Resistance Performance and Influencing Factors of Green Tires (Jilin University, 2020).
Wang Guolin, C. et al. Study on the influence of contact characteristics between tread and tire body on tire rolling resistance. Rubber Ind. 67 (06), 403–409 (2020).
Aboulyazid, A., Watany, M. & Abd Elhafiz, M. M. Theoretical Investigation of Spokes Geometry of non-pneumatic Tires for off-road vehicles[R] (SAE Technical Paper, 2021).
Chen Yingjun, L. & Juan, L. Effect of anti slip resin on the performance of tread rubber for all steel radial tires. Synth. Rubber Ind. 44 (03), 180–185 (2021).
Sailaja, R. et al. Optimising filler dosage to balance rolling resistance and grip properties tyre tread compound. Progr. Rubber Plast. Recycl. Technol. 39 (2), 169–180 (2023).
Mazur, V. V. Experiments to find the rolling resistance of non-pneumatic tires car wheels. In Proceedings of the 5th International Conference on Industrial Engineering (ICIE 2019), vol. I 5, 641–648 (Springer International Publishing, 2020).
Park, J. W. & Jeong, H. Y. Finite element modeling for the cap ply and rolling resistance of tires. Int. J. Autom. Technol. 23 (5), 1427–1436 (2022).
Ding, Y. et al. Evaluation of tire rolling resistance from tire-deformable pavement interaction modeling. J. Transp. Eng. Part. B: Pavements. 147 (3), 04021041 (2021).
Sharma, A. K., Bouteldja, M. & Cerezo, V. Multi-physical model for tyre–road contact–the effect of surface texture. Int. J. Pavement Eng. 23 (3), 755–772 (2022).
Liu, J. Thermal Coupled Finite Element Method Study and Rolling Resistance and Temperature Rise Calculation of Non Inflatable Tires (Beijing University of Chemical Technology, 2022).
Zhou Mengyu, L. et al. Tire rolling and heat generation based on nonlinear viscoelastic constitutive model. Polym. Mater. Sci. Eng. 36 (03), 73–78 (2020).
Hyttinen, J. et al. Truck tyre transient rolling resistance and temperature at varying vehicle velocities-Measurements and simulations. Polym. Test. 122, 108004 (2023).
Yu, K. Research on the Contradiction Mechanism and Collaborative Improvement Method between Tire Rolling Resistance and Gripping Performance (Jiangsu University, 2020).
Altair Engineering. HyperMesh User’s Guide (Version 2022) (Altair Engineering Inc., 2021).
Dassault Systèmes Abaqus Analysis User’s Guide (Version 2022), Dassault Systèmes Simulia Corp., Providence, RI, USA (2021).
Dassault Systèmes Abaqus Theory Guide (Version 2022), Dassault Systèmes Simulia Corp., Providence, RI, USA (2021).
Wang Xingyu, Z. et al. Research on grounding characteristics of radial tires based on Abaqus. Agric. Equip. Veh. Eng. 59 (02), 6–10 (2021).
Zhao, C. et al. Analysis of effect on temperature field of tire curing process by initial temperatures and condensate discharging. Appl. Therm. Eng. 257 (PC), 124424–124424 (2024).
Debin, H. & Youji, W. A fast method for calculating tire rolling Resistance.Heilongjiang province: CN202310472577.12023-11-14.
Li Aiqiang. Analysis and Optimization Design of Rolling Resistance of Composite Working Condition Tires (Shandong University of Technology, 2023).
Ejsmont, J. et al. Comparison of tire rolling resistance measuring methods for different surfaces. Int. J. Autom. Technol. 1–12. (2024).
Yunfei, G. et al. Study on the influence of cornering characteristics of complex tread tires on rolling resistance based on finite element method. Adv. Mech. Eng., 15(2) (2023).
Wiegand, B. P. Estimation of the Rolling Resistance of Tires (SAE Technical Paper, 2016).
Acknowledgements
This work was supported by the [Natural Science Foundation of Heilongjiang Province] under Grant [PL2024E029]; and [A new round of Heilongjiang Province “Double first-class” Achievements of collaborative innovation in disciplines. Give financial aidProject]under Grant[LJGXCG2023-068]; and [Longjiang Engineering Rooster Innovation Team Support Plan] under Grant[2024CYLJ02].
Author information
Authors and Affiliations
Contributions
First/Corresponding Author Introduction: WANG Qiang (1981-), male, professor, master’s supervisor, PhD, postdoctoral fellow, research direction: Low carbon application technology for vehicles, wangqiang@hljit.edu.cn.Introduction of Second Author: LI Ao (2000-), male, master’s student, research direction: Low carbon application technology for vehicles, liao1@hljit.edu.cn.Introduction of Third Author: YAN Jiani (2001-), female, master’s student, research direction: Low carbonization application technology for vehicles, 2833060570@qq.com.
Corresponding author
Ethics declarations
Competing interests
The authors declare no competing interests.
Additional information
Publisher’s note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution-NonCommercial-NoDerivatives 4.0 International License, which permits any non-commercial use, sharing, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if you modified the licensed material. You do not have permission under this licence to share adapted material derived from this article or parts of it. The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by-nc-nd/4.0/.
About this article

Cite this article
Wang, Q., Li, A. & Yan, J. Study on the relationship between the steady-state rolling resistance of radial tires and energy consumption of electric vehicles. Sci Rep 15, 45406 (2025). https://doi.org/10.1038/s41598-025-29797-3
Received:
Accepted:
Published:
Version of record:
DOI: https://doi.org/10.1038/s41598-025-29797-3
