
Abstract
To address the shortcomings of dynamic evaluation methods for simply supported girder bridges under moving loads, as well as the inefficiencies of traditional dynamic load test measurements, which are time-consuming and labor-intensive, this paper proposes a dynamic evaluation method incorporating the contact surface effect of actual wheels. This method refines a vehicle-bridge coupling model and verifies its accuracy through dynamic displacement measurements using millimeter-wave radar, complemented by modal analysis and dynamic load testing. The method also accounts for the effects of bridge deck roughness, vehicle speed, and weight on the impact coefficient of the bridge, comparing these effects with those outlined in the current code. The practical application of this method demonstrates that millimeter-wave radar, as a novel non-contact testing approach, can accurately measure the complex vibrations of bridges. The multi-point contact model predicts vehicle-bridge interactions more precisely than the single-point contact model, particularly under poor bridge deck conditions, with discrepancies between the models reaching up to 9.59% on Class D bridge deck roughness. The current code, which calculates the impact coefficient considering only a single factor, may not accurately reflect the actual impact coefficient of the bridge. In this study, an impact coefficient regression formula is also derived using vehicle speed and bridge deck roughness as independent variables, offering a tool for estimating the impact coefficients of similar bridges.
Similar content being viewed by others

Introduction
The vast majority of bridges in the world are small and medium-sized. For instance, according to statistics, China currently has a total of 1,033,200 highway bridges. Among them, there are 8,816 super-large bridges, accounting for 0.85%; 159,600 large bridges, accounting for 15.45%; and 864,784 small and medium-sized bridges, accounting for a substantial 83.70%1. Nevertheless, it is almost inevitable that small and medium-sized bridges will suffer structural damage and a decline in load-bearing capacity due to prolonged exposure to adverse loads, environmental erosion, and material degradation2,3,4,5,6. Ensuring the safe operation of numerous small and medium-sized bridges poses a significant challenge for the bridge maintenance industry7,8. The structural integrity of a bridge can be evaluated through various parameters, including modal characteristics, stress levels, strain measurements, deflection values, and impact coefficients9. Deflection, which is the vertical displacement of a bridge at a specific point when subjected to various external forces and environmental conditions, is a crucial metric for assessing the bridge’s stiffness. It serves as a pivotal indicator in evaluating the safety of the bridge. The impact coefficient, defined as the ratio of dynamic deflection to static deflection under vehicular loading, simplifies complex dynamic analyses into more manageable static evaluations. It is a key component in both the study of vehicle-bridge interactions and the evaluation of the dynamic performance of existing bridges10,11,12,13.
Vehicle-bridge coupled vibration has emerged as a significant area of inquiry within the realm of bridge dynamics. In recent years, the rapid advancement of computer technology has made numerical simulation a pivotal technique for analyzing vehicle-bridge coupling. Compared with traditional field measurements, numerical simulation has been widely used due to its advantages, such as low computational cost and the absence of site constraints14,15,16,17,18,19. The simulation system for vehicle-bridge coupled vibration is divided into three distinct components: the vehicle model, the bridge model, and the vehicle-bridge contact (wheel) model. To achieve a more realistic simulation of the interaction between wheels and the bridge deck, researchers from various countries have introduced three distinct wheel models: the disk model20,21, the airbag model22, and the multi-point contact force wheel model23,24. Chang et al.20 and Yin et al.25 proposed rigid and flexible disk tire models, respectively. Chang et al.20 and Yin et al.21 found that employing a single-point contact force wheel model tends to overestimate the impact of vehicles on bridges. Specifically, as bridge deck conditions deteriorate, the disk model can simulate the dynamic response of the bridge more accurately compared to the single-point contact force wheel model. Zhang et al.26 conducted an investigation into the dynamic vibration characteristics of expansion joints utilizing a flexible disk wheel model. In comparison, Kwasniewski et al.22 established a refined vehicle model by simulating tires with airbags. Their simulation outcomes were found to be in close concordance with experimental measurements. However, the modeling difficulty is higher it is more challenging to simulate the bridge surface roughness, and the computational efficiency is low. To circumvent the limitations in the aforementioned models, Zhang et al.27 introduced a three-dimensional multi-point contact force wheel model, building upon the foundation of its two-dimensional counterpart. Subsequently, the dynamic model of a simply supported girder bridge was built. This model was employed to assess the impact of the wheel contact surface on the dynamic interaction between vehicles and bridges. Deng et al.23 developed a multi-point contact force wheel model, employing a series of linear springs instead of a single spring point model. The findings indicate that a multi-point contact force wheel model offers a more precise prediction of bridge responses compared to the traditional single-point contact force wheel model, while also conserving computational resources. At present, while the multi-point contact force wheel model is theoretically more accurate and computationally efficient than both single-point contact force wheel models and other models28,29,30,31,32, empirical validation remains absent.
Currently, the impact coefficient is defined as the bridge’s fundamental frequency33 or its span length34. However, this definition does not encapsulate the variability imparted by certain influential factors, leading to a significant degree of uncertainty. Consequently, discrepancies are observed between the measured impact coefficients and their prescribed standard values35. In actual bridge engineering, the impact effect is influenced by a variety of factors. The bridge deck roughness, as the main source of excitation, can lead to impact coefficients well above the design values in case of poor road conditions]. Additionally, vehicle speed is acknowledged to influence the impact effect of vehicles on bridges14. However, there is no consensus regarding the specific impact of vehicle speed on the impact coefficient. Studies have demonstrated that the impact coefficient is positively correlated with vehicle speed37. Nevertheless, a definitive relationship between the two remains elusive38. Consequently, the impact coefficient formulas delineated in the specifications fail to precisely reflect the actual impact coefficient of bridges. A comprehensive consideration of the effects of various factors is essential35,39.
To address the aforementioned issues, this paper simulates the wheels according to the actual contact area of the wheels and establishes a model based on a multi-point contact force wheel. Then, Abaqus is used to establish a finite element model of vehicle-bridge coupling considering the wheel contact surface effect, and the bridge deck roughness is added to the vehicle-bridge coupling model by modifying the elevation of the bridge deck nodes. Finally, to further validate the accuracy and reliability of the vehicle-bridge coupling theory and its modeling approach, which accounts for wheel contact surface effects, millimeter-wave radar-based measurements have been conducted on actual bridges. Finally, the impact coefficient of the Cao Guan Ying South Bridge is calculated. The impact coefficient of the main girder is then analyzed through multiple regression, with the bridge deck roughness and the speed serving as independent variables. The formula’s validity is confirmed by comparing it against measured data from two distinct bridges with comparable fundamental frequencies.
Principle of millimeter-wave radar measurement technology
In recent years, radar technology has been extensively utilized for measuring bridge deflection, detecting damage, and monitoring deformation40,41. Millimeter-wave radar, which employs Linear Frequency Modulated Continuous Wave (LFMCW) technology42,43,44, leverages phase interferometry and displacement projection to ensure precise measurements. This approach is characterized by a low probability of interception and robust anti-jamming capabilities, enabling accurate multi-target identification and long-range measurements45,46.
As shown in Fig. 1a, the LFMCW radar transmits a linear sawtooth-swept signal, where SR(t) is calculated as follows:
Where f0 is the center frequency of the emitted signal, B is the signal bandwidth, T is the period, and ϕR is the phase of the reflected signal.
As per Eq. (1), it is determined that the frequency is directly proportional to the target distance r and is a single-frequency signal. In spectral analysis, a distinct peak occurs at this particular frequency f = 4Br/cT, where c is the speed of light. Utilizing this peak, the target distance can be deduced. Consequently, the target distance r is calculable using the following formula:
Figure 1b illustrates the phase interferometry technique employed by millimeter-wave radar. This is accomplished by measuring the phase difference between the signals reflected from the surface of an object, which achieves high-precision dynamic displacement measurement. The displacement dr in the direction of the millimeter-wave propagation can be accurately determined using Eq. (3):
Figure 1c presents the displacement projection technique. By integrating the radar-measured distance variation dr and the elevation angle α, the vertical (d⊥) and horizontal (d) displacements can be geometrically computed. This process yields a comprehensive depiction of the measured displacement of the object.

Principle of millimeter-wave radar measurement. (a) Linear FM continuous wave. (b) Phase interferometry. (c) Displacement projection.
Finite element model of vehicle-bridge coupling vibration
Bridge model
Engineering background
In this study, a simply supported girder bridge is taken as the research object (Fig. 2). The Cao Guanying South Bridge, situated in Shenjiaying Town, Yanqing District, Beijing, China, along Cao Yang Road, features a superstructure composed of reinforced concrete, simply supported T-beam. The substructure is characterized by a buried abutment. The bridge has an overall length of 29.0 m, with a span arrangement of 1 × 25.0 m, a total width of 9.8 m, a lane width of 7.0 m, and an under-clearance height of 2.3 m10.

Photos of Cao Guanying South Bridge. (a) Superstructure. (b) Bridge deck pavement.
FE (finite element) model of bridge
Modal tests were carried out according to the structural characteristics of Cao Guanying South Bridge. The modal testing system comprises a vibration transducer, a signal amplifier, a data acquisition system, and a vibration analysis software suite. The transducer captures the bridge’s vibration and converts it into an analog signal. This signal is then amplified by the signal amplifier and sent to the data acquisition system. The data acquisition device is responsible for recording the data, performing analog-to-digital (A/D) conversion, and setting sampling parameters. It is controlled by an on-site monitoring computer. The vibration analysis software suite processes the collected dynamic data of the bridge for modal analysis. Figure 3 illustrates the first-order vertical vibration mode of the bridge under specific conditions.

First-order vertical mode diagram of bridge measured.
The FE model of the bridge was established in the general-purpose finite element software, ABAQUS2021 (https://www.3ds.com/products/simulia/abaqus), as depicted in Fig. 4. The main girder and the bridge deck were modeled using three-dimensional solid elements (C3D8R). It was postulated that no relative sliding occurred between the main girder and the bridge deck slab. The Tie connection method was implemented to ensure the stability of the connection between the main girder and the bridge deck slab. At the same time, to simulate the restraint provided by the bearings, fixed bearings were installed at one end of the cross girder to restrict the bridge’s displacement in three dimensions: vertical, transverse, and longitudinal. Conversely, movable bearings were positioned at the opposite end to limit the displacement in two planes: vertical and transverse. The bridge superstructure was made of C50 concrete with a flexural stiffness of 6.83 × 1010 N⋅m2.

FE model of bridge.
The modal analysis of the bridge model was conducted using ABAQUS software. The first-order vertical bending vibration frequency of the bridge was determined to be fdi=5.33 Hz. From Fig. 3, the measured first-order frequency of the bridge is fmi=5.42 Hz. The discrepancy between the measured value and the value derived from the FE is less than 1%. This demonstrates that the finite element model presented accurately simulates the actual bridge structure, yielding precise and dependable results. The first-order vibration pattern, indicative of vertical bending, reveals that the measured fundamental frequency slightly exceeds the calculated value. This discrepancy suggests that the bridge’s actual bending stiffness is greater than the theoretical estimate. This indicates that the actual bending stiffness of the bridge is higher than the theoretical value, and the structural stiffness and dynamic response capacity are good.
Vehicle model
Contact force wheel model
Conventional vehicle-bridge coupling models typically employ a single point of contact force to simulate the interaction between the wheels and the bridge. However, in reality, the load is uniformly distributed to the bridge through the contact area between the wheels and the bridge deck. Therefore, it is not easy to accurately simulate the vibration response of a moving loaded vehicle on a bridge using a vehicle model with a single-point contact force.
To address this issue, the present study, which is grounded in the traditional vehicle-bridge coupling model, employs a multi-point contact force approach. This approach accounts for the actual contact area between the wheel and the ground, superseding the single-point contact force methodology. In accordance with JTG D60-2015 “General Specification for Design of Highway Bridges and Culverts”10,47, the contact surface size between a single wheel and the bridge deck is 20 cm in the longitudinal bridge direction and 30 cm in the transverse bridge direction. In addition, to ensure that the spring-damping properties of each wheel are equal to those of a conventional single-point contact model, the wheel contact force spacing for each wheel is set at 10 cm. Each wheel is represented by 12 wheels contact forces. Furthermore, multiple spring-damping systems are utilized to simulate wheel models with multi-point contact forces. The novel wheel model is simulated using a discrete rigid body, which is assigned an equivalent mass to replace the wheel. This discrete rigid body is characterized by translational motion exclusively, with no rotational capacity. It uniformly imparts the wheel’s contact force to the bridge deck. A comparison of the two wheel’s models are depicted in Fig. 5. The force coordination equation for each wheel contact force is:
Where: \(f_{{vb}}^{{\operatorname{int} }}\) is the interaction force vector between the vehicle and the bridge; \(\Delta _{L}^{i}\) is the absolute displacement between the bridge deck and the wheels, Cti, j, and Kti, j are the damping and stiffness corresponding to the j contact force of the i wheel, respectively; and N is the number of contact forces per wheel.

Model of contact force wheel. (a) Single-point contact. (b) Multi-point contact.
FE model of vehicle
In this study, a three-axle heavy vehicle is used to simulate the vehicle weight of 34 tons. The location and specific characteristics of the contact force at each single point of the multi-point contact model are shown in Table 1; Fig. 6 ~ 748. To ensure equivalence in the aggregate spring-damping properties of each wheel with those of the conventional single-point contact model, the spacing of the wheel contact forces for each wheel is established at 10 cm. After obtaining the specific parameters of the vehicle model, the stiffness and damping of each wheel are uniformly equated to 12 parts. In addition, the vehicle model employs discrete rigid body units and spring-damped connections to create a simplified spatial representation of the vehicle as a mass-spring-damping system. This system accounts for the overall motion of the vehicle body in three dimensions of freedom: vertical, lateral, and pitch. The wheel is replaced by a discrete rigid body, which is constrained to move only in the vertical direction by constraining the rotation of the discrete rigid body.

FE model of a single-point contact vehicle.

FE model of a multi-point contact vehicles.
To address the issue of wheel nodes from the vehicle coming into contact with the bridge without interpenetration, this study employs the generic contact method. The normal contact is defined as a hard contact, while the tangential contact is modeled as a penalty friction with a friction coefficient established at 0.610,49.
Bridge deck roughness model
Numerical simulation method of bridge deck roughness
The main excitation to which vehicles are subjected during traveling originates from the bridge deck roughness. An uneven bridge deck can exacerbate vehicle vibrations, thereby potentially compromising vehicle stability. Current research typically employs the trigonometric series method to represent bridge deck roughness50,51. The wheels of the left and right sides contact different roughness profiles of the bridge deck. The lateral correlation of the phase angles for both wheels is considered by incorporating the function r(n), thereby enhancing the precision of the wheel-deck interaction simulation52. The expressions for the bridge deck roughness functions for the left rL(x) and right rR(x) wheels are formulated as follows:
Where: D is the distance of wheel; p is an empirical value, typically 1; θ1 is the random number in L; θL, θR are random numbers uniformly distributed in [0, 2π]; x is the longitudinal coordinate of an uneven point in the longitudinal bridge direction, and r(x) is the value of the bridge deck roughness; A(nk) = 4Gd (nk) Δn, Gd (nk) is the pavement power spectral density function, nk = nl+(k-1/2)Δn, k = 1,2⋅⋅⋅, N, Δn is the spatial frequency; nh and nl are the upper and lower limits of the spatial frequency.
According to GB/T 7031 − 2005 “Mechanical vibration—Road surface profiles—Reporting of measured data”53, the bridge deck is divided into A ~ H grades according to the roughness. The current road conditions in China show that the vast majority of bridge deck roughness falls within the four grades of A to D. Therefore, it is necessary to establish the corresponding bridge deck roughness model, as shown in Fig. 8.

Sample curve of bridge deck roughness.
Measured bridge deck roughness and power spectrum estimation
Bridge deck roughness is a primary contributor to the excitation of coupled vehicle-bridge vibrations. To quantitatively assess the impact of bridge deck roughness on the dynamic response within the vehicle-bridge system, it is essential to estimate and categorize the power spectrum of the measured roughness profiles. The roughness of the Cao Guanying bridge deck was measured using a precision level with a sampling interval of 15 cm to obtain the longitudinal two-dimensional bridge deck unevenness curves along the wheel tracks. Figure 9 shows the left and right wheel bridge deck roughness curves of the actual traveling route of the vehicle on the bridge deck. It can be seen that the size of the measured bridge deck roughness values of the left and right wheels are located in the interval of -6.74 mm ~ 7.64 mm. Utilizing the Fourier transform, the power spectrum of the measured bridge deck roughness was derived. This spectrum was compared against Class A and B pavements’ target power spectra, as stipulated in GB/T 7031 − 2005. The comparison is shown in Fig. 10. It can be seen that the peak value of the power spectrum curve of measured bridge deck roughness is between the target power spectrum of Class A pavement and the target power spectrum of Class B pavement.

Mmeasurement curve of bridge deck roughness.

Power spectrum curve of measured bridge deck roughness.
FE analysis method for bridge deck roughness
To model bridge deck roughness using ABAQUS, the process begins by extracting the nodes and coordinates of the bridge deck pavement components. Subsequently, the original node coordinates of these components are substituted with longitudinal coordinates corresponding to five distinct levels of bridge deck roughness data. This substitution is designed to represent varying bridge deck conditions. Ultimately, the model is submitted to ABAQUS for analysis and calculation. Under the premise that the vehicle moves in a straight-line trajectory, computational efficiency is enhanced by modifying solely the longitudinal coordinates of the vehicle tires and the correspondingly wide bridge deck beneath the travel path, as illustrated in Fig. 11 This approach incorporates the bridge deck roughness and enhances numerical calculation efficiency, with the detailed implementation process as show Fig. 12.

FE model of bridge deck roughness.

Flow chart of vehicle-bridge coupling calculation.
Comparative verification of radar measurement and numerical calculation
Dynamic deflection measurement scheme
Figure 13a shows conventional microwave radar equipment, which is usually characterized by large size, complexity of operation and high cost54,55,56,57. However, the radar (Fig. 13b) employed in this study is a portable device, independently developed by our team. The device is compact, has dimensions similar to those of a standard smartphone, and is cost-effective. It consists of a radar, wireless module, data cable, router, and acquisition terminal. Moreover, it utilizes a wireless networking mode, distinguishing it from conventional microwave radars that depend on wired connections. It demonstrates robust adaptability to environmental variables, exhibiting negligible performance degradation due to light, dust, and smoke. It excels in precision, achieving a measurement accuracy of 0.01 mm, thus offering reliable data for diverse applications. The system is capable of continuous operation, maintaining stability for up to 8 h, fulfilling the requirements for extended-duration measurements. Regarding the measurement range, the microwave radar system extends to 50 m, effectively facilitating the detection of distant targets.

Millimeter-wave radar equipment. (a) Conventional microwave radar. (b) New lightweight millimeter-wave radar.
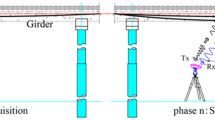
Dynamic deflection measurements of the bridge were conducted using new lightweight millimeter-wave radar. The schematic arrangement of the measurement points is depicted in Fig. 14. To collect the dynamic deflection time curve, a sampling frequency of at least 2.56 times the fundamental frequency of the structure is required. The millimeter-wave radar can achieve a sampling frequency of up to 50 Hz, which meets the requirements for dynamic deflection measurement.
The primary procedures for conducting field tests with the new lightweight millimeter-wave radar system are as follows: (1) Determine the quantity of test radars and wireless modules required for the system and configure the test setup with the bridge static load test programme. (2) Position the millimeter-wave radar on the ground within the test bridge span. Align the radar’s transmission and reception surfaces vertically with the test main girder’s position and activate the power switch. (3) Establish a wireless local area network (LAN) connection among the radar console, wireless transmitter module, wireless router, and laptop, and perform system diagnostics to ensure the test system operates correctly. (4) Upon completion of the test system debugging, launch the test software interface to verify the radar channel configuration. (5) Initiate radar testing to identify the measurement point using the distance-based information from the echo signals, prioritizing those with greater direct wave energy. Assess the correspondence between the radar’s field test measurements and the main beam structural test distances to confirm the accuracy of the measurement point location. (6) To establish the location of a measurement point, one must set the sampling frequency, termination conditions, and other pertinent parameters for the sampling process. This setup ensures that the deflection deformation signal at the measurement point is within normal operational parameters. Should the sampling signal for the measurement point’s deflection indicate an anomaly, further debugging of the radar equipment and configuration parameters is required. (7) Once the debugging of one radar is complete, proceed to the next stage, which involves configuring the radar equipment channel settings, and determining measurement points. (8) The preparation of the entire test system is completed once all radar equipment channels, and sampling parameters are set, and the data from each measurement point operates normally. (9) Establish the data storage directory and initiate the static load test to measure deflection.
During the test, the test vehicle passes through the bridge to be tested at a uniform speed of 20 km/h and 30 km/h, which causes vibration to the bridge structure due to the impact on the bridge deck during the travelling process. The test loaded vehicle weighs 34 tons. The spacing between left and right wheels is 1.8 m. The distance from front axle to the center of travel of vehicle body is 3.5 m. The distance from rear axle to the center of travel of vehicle body is 1.3 m.

Layout of measurement points. (a) Measurement schematic diagram. (b) Measurement field.
Comparison of results
Single-point and multi-point contact vehicle-bridge coupling models considering bridge deck roughness were developed, respectively. A heavy vehicle model equivalent to 34 tons was used to simulate the uniform dynamic load at velocities of 20 km/h and 30 km/h, respectively. The dynamic deflection displacement curves for measurement points 1 to 3 were derived and compared with the results of the millimeter-wave radar measurement. These comparative results are presented in Table 2. It can be seen that the deflection at measurement point 1 is the largest, followed by measurement point 2, and the deflection at measurement point 3 is the smallest. This reflects the force characteristics of the bridge structure under load, with measurement point 1 representing the most critical cross-section of the bridge.
The peak dynamic deflections at various measurement points, as determined by the two finite element simulation methods, closely approximate the actual peak values. Calibration coefficients exceeding 0.90 suggest that the finite element calculations are highly accurate and align well with real-world conditions. Furthermore, the single-point contact model’s calculation results are slightly higher than those of the multi-point contact model, with the discrepancy between the two being less than 5%.
Figure 15 presents the dynamic deflection displacement curve for measurement point 1. This figure reveals that the dynamic deflection trends of the cross-section, as derived from two distinct finite element simulation methods, closely match the measured dynamic deflection curves. Additionally, the calculated outcomes for both the single-point contact and multi-point contact models are in close proximity to the results obtained from the millimeter-wave radar measurement. It is noted that the multi-point contact model generally provides a simulation effect that is more congruent with actual conditions. The discrepancies between these results are depicted in Fig. 16, indicating the differences in model accuracy.

Dynamic deflection displacement curve. (a) 20 km/h. (b) 20 km/h.

Model error of bridge deck roughness.
Effect of bridge deck roughness on wheel contact response
In contrast to the single-point contact model, the multi-point contact model incorporates more complex contact effects, thereby providing a more precise simulation of the dynamic response of the bridge to vehicle loads. This approach offers a reliable foundation for assessing bridge performance. To further explore the discrepancies in bridge vibration response between the multi-point and single-point contact models under varying degrees of bridge deck roughness, this study examines the impact of four distinct levels of roughness, labeled A through D. The analysis focuses on the vibration response of the most critical cross-section, cross-section 1 , under each category of bridge deck roughness for vehicle speeds of 20 km/h and 30 km/h. The findings are presented in Fig. 17 and 18 . It can be seen that the maximum dynamic deflection under the multi-point contact model is slightly smaller than that under the single-point contact model, and this difference exists under different bridge deck roughness levels.
The maximum deflections predicted by the multi-point contact model at a vehicle speed of 20 km/h were 0.71%, 3.51%, 6.33%, 9.59%, and 2.12% less than those of the single-point contact model for bridge decks classified from Class A to D, as well as for the measured bridge decks. This discrepancy primarily stems from the multi-point contact model’s approach to distributing the wheel contact force according to the actual contact length of the tires, thereby reducing the contact action effect of the vehicle on the bridge. This advantage becomes more pronounced with increased bridge deck roughness. In addition, for the same bridge deck roughness at different speeds, the difference between the single-point contact model and the multi-point contact model is not significant. This indicates that the bridge deck roughness is the main factor affecting the accuracy of these two simulation methods.

Comparison of single-point contact and multi-point contact. (a) 20 km/h. (b) 30 km/h.

Differences between single-point contact and multi-point contact.
Impact coefficient analysis of simply supported girder bridge
Calculation conditions and impact coefficient calculation method
The above analysis reveals that under conditions of increased bridge deck roughness, the multi-point contact model more effectively captures the dynamic response of vehicles to the bridge. Utilizing this model, the impact coefficients of simply supported girder bridges are examined to assess the influence of vehicle-bridge coupling vibration. The examination includes the trend of impact coefficients under various factors, such as different levels of bridge roughness and varying vehicle speeds. In accordance with JTG/T J21-01-2015 “Load Measurement Methods for Highway Bridge”58, the impact coefficient is determined by the following formula:
Where: fdmax is the maximum peak value of the dynamic effect of the cross-section when the vehicle crosses the bridge; fdmin is the minimum peak value of the dynamic effect of the cross-section when the vehicle crosses the bridge; fjmax is the maximum value of the static effect corresponding to the same vehicle when it acts on the bridge cross-section statically.
According to JTG D60-201533, the deflection impact coefficient is related to the self-vibration characteristics of the bridge, and the specific calculation formula is as follows:
The measured frequency of Cao Guanying Bridge is 5.42 Hz, and the standard value of the impact coefficient of this bridge is 0.28 according to formula (8).
Impact coefficient analysis
Influence of bridge deck roughness
The impact of bridge deck roughness on bridge at a constant vehicle speed is discussed with the findings depicted in Fig. 19. The analysis reveals the following: (1) There is a positive correlation between the bridge impact coefficient and the degree of bridge deck roughness. At a constant speed, an increase in deck roughness significantly elevates impact coefficient. (2) The impact coefficients of different girders vary, yet they follow a similar pattern with respect to changes in the degree of bridge deck roughness. (3) Upon reaching level C of deck roughness, the impact coefficients for different girders approximate the standard values, suggesting that the standard-derived coefficients are conservative. (4) At level D of roughness, the impact coefficients for various girders exceed the standard values. It is evident that the bridge deck roughness is a significant factor influencing the impact coefficient and is also a critical consideration for subsequent bridge maintenance.

Impact coefficient of deflection under different deck irregularity. (a) Speed: 10 m/s. (b) Speed: 15 m/s. (c) Speed: 20 m/s. (d) Speed: 25 m/s. (e) Speed: 30 m/s. (f) Speed: 35 m/s.
Influence of vehicle speed
This study examines the impact of varying vehicle speeds on the impact coefficients of different main girders, considering the effects of different levels of bridge deck roughness. Additionally, the standard value of the deflection impact coefficient, set at 0.28, is derived using Eq. (6), with the findings depicted in Fig. 20. The analysis reveals that: (1) the impact coefficient is not solely dependent on an increase in speed due to the influence of bridge deck roughness. Instead, it exhibits a non-monotonic increase or decrease, reaching a peak at a certain speed, which complicates the pattern of its variation; (2) while the impact coefficients for bridges with different girders vary in value with different speeds, the trend of these changes remains fundamentally consistent.
Upon comparing the derived impact coefficients with the standard values for this bridge, it is observed that under various speed conditions, the impact coefficients of different girders for Classes A and B are lower than the standards. Furthermore, under at the existing speed, these girders of the impact coefficients for Class D all exceed the standards.

Influence of impact coefficient of bridge at different measured points. (a) Class A of bridge deck roughness. (b) Class B of bridge deck roughness. (c) Class C of bridge deck roughness. (d) Class D of bridge deck roughness.
Influence of vehicle weight
Figure 21 and 22 demonstrate the influence of varying vehicle weights on the bridge impact coefficient. It is evident from figures that the relationship between vehicle speed and impact coefficients, at a constant level of bridge deck roughness, is not linear for different vehicle weights. Indeed, there is an optimal vehicle speed at which the impact coefficient is maximized for each weight class. Furthermore, when the vehicle speed is held constant and only the bridge deck roughness level is varied, the impact coefficients for varying vehicle weights exhibit notable differences. As the roughness of the bridge deck escalates, there is a significant increase in the vehicle impact coefficient on the bridge. This trend is consistent across vehicles of varying weights, indicating that the condition of the bridge deck significantly influences the dynamic performance of the bridge.
A notable disparity exists in the sensitivity of vehicles of varying weights to bridge deck roughness. Lighter vehicles, owing to their reduced mass, are more vulnerable to the effects of bridge deck roughness, leading to a heightened impact coefficient. Conversely, heavier vehicles exhibit relatively lower sensitivity to such roughness due to their greater mass, yet they elicit a more substantial vibration response within the bridge. This implies that damaged bridges may face a more substantial threat from heavy vehicles, as they are likely to provoke more severe vibrations and shocks. Consequently, in practical engineering projects, it is imperative to consider factors including vehicle weight, speed, and the degree of bridge deck roughness to conduct a thorough assessment of dynamic performance for bridge. This comprehensive evaluation is essential for maintenance and reinforcement, thereby ensuring the structural safety and operational reliability of the bridge.

Impact coefficient of different speed. (a) Class A of bridge deck roughness. (b) Class B of bridge deck roughness. (c) Class C of bridge deck roughness. (b) Class D of bridge deck roughness.

Impact coefficient of different bridge deck roughness. (a) Speed: 10 m/s. (b) Speed: 15 m/s. (c) Speed: 20 m/s. (d) Speed: 25 m/s. (e) Speed: 30 m/s. (f) Speed: 35 m/s.
Impact coefficient regression formula and validation
Impact coefficient regression formula
The current code defines the impact coefficient as a function of the fundamental frequency26 of bridge. However, analyses within this paper, indicate that the impact coefficient is also influenced by external factors, including bridge deck roughness and vehicle characteristics. Prior research59 has established the sensitivity ranking of factors affecting the small bridge impact coefficient as follows: bridge deck roughness > vehicle speed > horizontal loading position > vehicle weight. From Fig. 19, it can be obtained that the impact coefficient varies between 0 and 0.72 for different bridge roughness. From Fig. 20 it can be obtained that the impact coefficient is between 0 and 0.68 for different vehicle speeds. And from Fig. 22, it can be obtained that the impact coefficient is between 0 and 0.48 for different vehicle weights. Thus, it can be obtained that the impact coefficient is more sensitive to the change of bridge roughness and vehicle speed. This analysis further confirms that bridge deck roughness and speed significantly influence the impact coefficient. To facilitate the precise calculation of the impact coefficient for simply supported T-girders, a multiple regression analysis was conducted. This analysis utilized the bridge deck roughness and speed as independent variables. Matlab software was employed to derive the regression Eq. (9) for the impact coefficient µ with respect to bridge deck roughness r and speed v. The resulting regression surface is depicted in Fig. 23.

Regression surface of impact coefficient.
In Fig. 23, the horizontal coordinates represent the categories of bridge deck roughness level A to D, while the vertical coordinates denote speed. The goodness of fit is evidenced by an SSE (Sum of Squared Errors) value of 0.026 and an R² value of 0.962, suggesting a strong correlation. The impact coefficient of the main girder, along with the bridge deck roughness and speed , exhibits a regression surface that aligns with the trend of FE model calculated values. Furthermore, for bridge deck roughness categorized as grade C or lower, the regression surface falls below the standard value, which corroborates the numerical calculation outcomes presented in this paper.
Impact coefficient regression formula validation
To substantiate the reliability of the regression formulas presented in this paper, impact coefficients of this bridge and a simply supported T-beam bridge with a similar fundamental frequency60 were studied. In accordance with the measured conditions, the variable in Eq. (8) is selected based on actual scenarios: for Bridge 1, the bridge deck roughness is B; for Bridge 2, it is C. The variable represents the actual vehicle speed. A comparison of the results is delineated in Table 3.
Upon reviewing the comparison presented in Table 3, it is observed that the impact coefficients of the main girders for the two actual bridges, as calculated by the regression formula, exhibit deviations of less than 17% from the measured values. This suggests that Eq. (9) is applicable for estimating the impact coefficients of similarly designed simply-supported T-beam bridges with comparable fundamental frequency.
Conclusions
This study focuses on the analysis of simply supported girder bridges, encompassing both small and medium-sized structures. A vehicle-bridge coupling model is established, which takes into account the impact of bridge deck roughness, vehicle speed, and weight on the impact coefficient. This analysis is further validated through comparative measurements using millimeter-wave radar. The main conclusions drawn from this study are as follows.
-
i.
This study employs a multi-point contact wheel model that corresponds to the actual contact area and it incorporates a bridge deck roughness model aligned with the tire width. This approach enhances computational efficiency while providing a more realistic simulation of the vehicle-bridge coupling interaction.
-
ii.
Upon comparative analysis of the single-point and multi-point contact models, it is evident that the multi-point contact model more accurately simulates the coupling between vehicle and bridge. This superiority becomes particularly pronounced with increased bridge deck roughness. Specifically, the multi-point contact model demonstrates an accuracy that is 9.59% greater than that of the single-point contact model under Class D bridge deck roughness.
-
iii.
The impact coefficient is influenced by bridge deck roughness, resulting in a more complex relationship with vehicle speed and weight. There is no linear correlation between the deflection impact coefficient and the increase in vehicle speed and weight. However, the impact coefficients across various girders exhibit similar patterns of change in response to variations in speed and weight.
-
iv.
For simply supported girders with approximate fundamental frequencies, the regression formula takes into account the factors of speed and bridge deck roughness, providing a more accurate representation of the bridge’s actual conditions under vehicular impact. The discrepancy between the impact coefficients derived from the regression formula and the measured values for two actual bridges is approximately 10%.
-
v.
Utilizing finite element simulation and millimeter-wave radar provides a means to accurately and reliably acquire dynamic deflection data. This approach is well-suited for the rapid assessment of bridge vibration responses and can be employed to measure both the vibration responses and impact coefficients of bridges.
This study introduces a new dynamic bridge assessment method that accounts for wheel contact, improving on traditional approaches. However, its applicability is limited by specific test conditions, which may not represent variability like different vehicles and traffic. The multi-point contact model is more accurate than the single-point one but doesn’t fully address complex vehicle-bridge interactions under extreme conditions. Future work should expand the data with diverse vehicles and bridge scenarios and investigate long-term effects of dynamic loads on material fatigue. Advanced modeling like finite element analysis could enhance understanding and bridge maintenance strategies.
Data availability
The datasets used and/or analysed during the current study available from the corresponding author on reasonable request.
References
Ministry of Transport of People’s Republic of China. In Statistical Bulletin on the Development of the Transport Industry in 2022 (Ministry of Transport of People’s Republic of China, 2023).
Li, Y. Y., Obrien, E. & González, A. The development of a dynamic amplification estimator for bridges with good road profiles. J. Sound Vib. 293(1–2), 125 – 37. (2006).
Liu, B. et al. Impact coefficient and reliability of mid-span continuous beam bridge under action of extra heavy vehicle with low speed. J. Cent. South. Univ. 22 (4), 1510–1520 (2015).
Malekjafarian, A. & Obrien, E. J. On the use of a passing vehicle for the estimation of bridge mode shapes. J. Sound Vib. 397, 77–91 (2017).
Xia Ye, J., Xudong, D. & Lu. Research on traffic-vedio-aided bridge weigh-in-motiong approach. China J. Highway Transp. 34 (12), 104–114 (2021).
Hongshuo, S., Li, S. & Zhiwu, Y. A Deep Learning-Based Bridge Damage Detection and Localization Method. Vol. 193 (Mechanical Systems and Signal Processing, 2023).
Liang, Y. Z. & Xiong, F. Measurement-based bearing capacity evaluation for small and medium span bridges. Measurement 149 (2020).
Xu, Z. et al. Rapid Testing and Virtual Evaluation Method of load-carrying Capacity of Short and medium-span Bridges. Engineering Mechanics.
Han Yi, Z., Zhenghua, Z., Yi, L., Xujin, W. & Jie, Z. W. Dynamic deflection simulation of bridge in driving process based on ABAQUS software. Technol. Earthq. Disaster Prevent. 18 (01), 118–126 (2023).
Liu, Y. et al. Numerical Calculation and Experimental Verification of Deflection Impact Factor for A Simply Supported Beam Bridge Subjected to Moving Vehicle Loads. Journal of Beijing University of Technology. http://kns.cnki.net/kcms/detail/11.2286.t.20240604.1629.004.html.1-11 (2025-01-19).
Ma, L. et al. Determining the dynamic amplification factor of multi-span continuous box girder bridges in highways using vehicle-bridge interaction analyses. Eng. Struct. 181, 47–59 (2019).
Deng, L., He, W. & Shao, Y. Dynamic impact factors for shear and bending moment of simply supported and continuous concrete girder bridges. J. Bridge Eng., 20(11) (2015).
Gao, Q. et al. Dynamic responses of a three-span continuous girder bridge with variable cross-section based on vehicle–bridge coupled vibration analysis. IES J. Part. A Civ. Struct. Eng. 8(2) (2015).
Deng, L. & Cai, C. S. Development of dynamic impact factor for performance evaluation of existing multi-girder concrete bridges. Eng. Struct. 32 (1), 21–31 (2010).
Deng, L. et al. Research progress in theory and applications of highway vehicle-bridge coupling vibration. China l. Highw. Transp. 31 (07), 38–54 (2018).
Ma, L. et al. The theoretical impact factor spectrum for highway beam bridges. J. Bridge Eng., 26(12). (2021).
Han , F. et al. A study on dynamic amplification factor and structure parameter of bridge deck pavement based on bridge deck pavement roughness. Adv. Civ. Eng. 2018, 1–8 (2018).
Huang, D. Dynamic and impact behavior of half-through arch bridges. J. Bridge Eng. 10 (2), 133–141 (2005).
Ma, L., Zhang, W., Han, W. S. & Liu, J. X. Determining the dynamic amplification factor of multi-span continuous box girder bridges in highways using vehicle-bridge interaction analyses. Eng. Struct. 181, 47–59 (2019).
Chang, K. C. et al. Disk model for wheels moving over highway bridges with rough surfaces. J. Sound Vib. 330 (20), 4930–4944 (2011).
Yin, X. et al. Non-stationary random vibration of bridges under vehicles with variable speed. Eng. Struct. 32 (8), 2166–2174 (2010).
Kwasniewski, L. et al. Finite element analysis of vehicle-bridge interaction. Finite Elem. Anal. Des. 42 (11), 950–959 (2006).
Deng, L. et al. A multi-point Tyre model for studying bridge-vehicle coupled vibration. Int. J. Struct. Stab. Dyn. 16(8). (2016).
Zhang, Y., Zhao, H. S. & Lie, S. T. A nonlinear multi-spring tire model for dynamic analysis of vehicle-bridge interaction system considering separation and road roughness. J. Sound Vib. 436, 112–137 (2018).
Yin, X. F. et al. Bridge vibration under vehicular loads: Tire patch contact versus point contact. Int. J. Struct. Stab. Dyn. 10 (3), 529–554 (2010).
Zhang, L., Wang, S. H. & Li, B. Dynamic response of a vehicle-bridge expansion joint coupled system. Shock Vib. 2022 (2022).
Zhang, L. W. et al. Research on vehicle-bridge interaction using Tire patch contact load. China l. Highw. Transp. 1–17 (2023).
Zhong, L. W. et al. The influence of vehicle-tire contact force area on vehicle-bridge dynamic interaction. Can. J. Civ. Eng. 43 (8), 769–772 (2016).
Deng, L., Wang, W. & Cai, C. S. Effect of pavement maintenance cycle on the fatigue reliability of simply-supported steel I-girder bridges under dynamic vehicle loading. Eng. Struct. 133, 124–132 (2017).
Wang, W. & Deng, L. Impact factors for fatigue design of steel I-Girder bridges considering the deterioration of road surface condition. J. Bridge Eng. 21(5). (2016).
Feng, W. Mechanistic-Empirical Study of Effects of Truck Tire Pressure on Asphalt Pavement Performance. 1–12 (University of Texas at Austin, 2005).
Wang, H. & Al-Qadi, I. L. Combined effect of moving wheel loading and three-dimensional contact stresses on perpetual pavement responses. Transp. Res. Rec. 2095 (1), 53–61 (2009).
Ministry of Communications of PRC. Code for Design of Highway Reinforced Concrete and Prestressed Concrete Bridges and Culverts (Beijing, 2015) (in Chinese).
Agency, N. Z. T. Bridge Manual (Wellington, 2013).
Shi, S. W., Zhao, J. & Shu, S. Y. Analysis of difference between measured value and code specified value for impact coefficient of Girder bridge. World Bridges (02), 79–82 (2010).
Huang, D. Z. Vehicle-induced vibration of steel deck arch bridges and analytical methodology. J. Bridge Eng. 17 (2), 241–248 (2012).
Li, H. Y., Wekezer, J. & Kwasniewski, L. Dynamic response of a highway bridge subjected to moving vehicles. J. Bridge Eng. 13 (5), 439–448 (2008).
Zhu, J. S. & Xu, Y. F. Research on the impact factor of the three span continuous beam-arch combined bridge based on the vehicle-bridge coupled vibration. J. Railway Sci. Eng. 16 (4), 959–967 (2019).
Yang, Y. B. & Wu, Y. S. A versatile element for analyzing vehicle-bridge interaction response. Eng. Struct. 23 (5), 452–469 (2001).
Ieraccinim, F.P. et al. High-speed CW step frequency coherent radar for dynamic monitoring of civil engineering structures. Electron. Lett. 40 (14), 907–908 (2004).
Kims, N. On the development of amultifunction millimeter-wave sensor for displacement sensing and low-velocity measurement. IEEE Trans. Microw. Theoryand Tech. 52 (11), 2503–2512 (2004).
Xiong, Y. et al. High-precision frequency estimation for FMCW radar applications based on parameterized de-alternating and modified ICCD. Meas. Sci. Technol. 29(7). (2018).
Pieraccini, M. et al. High-speed CW step-frequency coherent radar for dynamic monitoring of civil engineering structures. Electron. Lett. 40(14). (2004).
Chen, W. & Li, C. Radar-based displacement/distance measuring techniques. J. Electron. Meas. Instrum. 29(9), 1251–1265 (2015).
Catsamas, S. et al. A low-cost radar-based iot sensor for noncontact measurements of water surface velocity and depth. Sensors 23 (14), 6314 (2023).
Zhang, J. et al. A. 2D motion track measurement method with high precision based on CW radar. Transducer Microsyst. Technol. 37 (11), 25–2730 (2018).
JTG D60-2015. Standards for General Specification for Design of Highway Bridges and Culverts. Chinese Standard (in Chinese) (Ministry of Transport of People’s Republic of China, 2015).
Chen, S. S., Fu, L. & Gui, S. R. Study on vehicle-bridge coupled vibration response andImpact coefficient for the Ganjiang Bridge in Fushan. J. East. China Jiaotong Univ. 35 (05), 27–34 (2018).
Zhang, J. Static and Dynamic Characteristics and Vehicle Bridge Coupling Vibration Analysis of Spatial Y-shaped Steel arch Bridge (Xi’an University of Architecture and Technology, 2021).
Schiehlen, W. & Hu, B. Spectral simulation and shock absorber identification. Int. J. Non-Linear Mech., 38(2). (2003).
Wang, X., Zhao, J. B. & Wang, J. Z. An improved road roughness simulation method based on trigonometric series method. Appl. Mech. Mater. 2987, 513–517 (2014).
Bogsjo coherence of road roughness in left and right wheel-path. Veh. Syst. Dyn. 46 (S1), 599–609 (2008).
GB/T 7031 – 2005. Standards for Mechanical Vibration—Road Surface Profiles—Reporting of Measured Data (Ministry of Transport of People’s Republic of China) (Standard Press of China, 2005). (in Chinese).
Zhang, G. et al. Radar-based multipoint displacement measurements of a 1200-m-long suspension bridge. ISPRS J. Photogramm. Remote Sens. 167 (2020).
Luzi, G., Crosetto, M. & ,Fernández, E. Radar interferometry for monitoring the vibration characteristics of buildings and civil structures: Recent case studies in Spain. Sensors 17(4) (2017).
Zhao, W., Zhang, G. & Zhang, J. Cable force estimation of a long-span cable-stayed bridge with microwave interferometric radar. Comput.-Aided Civ. Infrastruct. Eng. 35 (12), 1093–9687 (2020).
Gentile, C. & Luzi, G. Radar-based dynamic testing of the cable suspended bridge crossing the Ebro River at Amposta, Spain. In Proceedings of the 11th International VMLC. 180. (2014).
JTG/T J21-01-2015. Standards for Load Measurement Methods for Highway Bridge. Chinese Standard. (in Chinese). (Ministry of Transport of People’s Republic of China, 2015).
Zhu, J. S., Xiang, C. & Qi, H. D. Study of influencing factors of impact coefficient of long-span suspension bridge. J. Tian Univ. (Sci. Technol.) 52 (04), 413–422 (2019).
Yang, L. J. Application of dynamic load measurement in simply supported beam bridge detection. Shanxi Archit. 44 (35), 176–177 (2018).
Acknowledgements
The authors gratefully acknowledge the financial support by Shenzhen Urban Public Safety and Technology Institute, and Key Laboratory of Urban Safety Risk Monitoring and Early Warning, Ministry of Emergency Management, and Shenzhen Science and Technology Program (ZDSYS20210929115800001).
Author information
Authors and Affiliations
Contributions
Data curation, Ruixin Jia; Formal analysis, Ruixin Jia; Investigation, Jinxi Long; Methodology, Shangqing Zhu; Funding acquisition, Yue Liu; Supervision, Yue Liu; Visualization, Fang Dong and Gang Cai; Writing – original draft, Ruixin Jia; Writing – review & editing, Ruixin Jia, and Yue Liu.
Corresponding author
Ethics declarations
Competing interests
The authors declare no competing interests.
Additional information
Publisher’s note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution-NonCommercial-NoDerivatives 4.0 International License, which permits any non-commercial use, sharing, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if you modified the licensed material. You do not have permission under this licence to share adapted material derived from this article or parts of it. The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by-nc-nd/4.0/.
About this article

Cite this article
Jia, R., Long, J., Dong, F. et al. Vibration response analysis of simply supported girder bridges using millimeter-wave radar measurements. Sci Rep 15, 6679 (2025). https://doi.org/10.1038/s41598-025-85211-y
Received:
Accepted:
Published:
Version of record:
DOI: https://doi.org/10.1038/s41598-025-85211-y
