
Abstract
Underwater imaging methods based on scattering models usually require the estimation of the target’s polarization information. Targets in real environments exhibit complex polarization characteristics, and these characteristics are also related to the material properties and structures. In a single scene, both high-polarization and low-polarization targets may coexist, and a single target may also contain both high-polarization and low-polarization regions. Segmenting the target areas and computing for each region can effectively enhance the quality of the image’s reconstruction. In this paper, we proposes an adaptive partition-based underwater polarization imaging method for complex objects. This method enables adaptive partition calculations for target images with complex polarization characteristics. It utilizes an image contribution operator to describe the contribution of regions to the quality of image recovery. The image contribution operator comprises a region size operator and an error control operator, which characterize the proportion of the partition and the polarization light component. By using the numerical value of the image contribution operator, the target image can be adaptively partitioned, allowing for individual estimation of the target’s reflection light polarization for each region. This method addresses the issue of poor image recovery for targets with complex polarization characteristics. Experimental results from various underwater scenarios show that this method can achieve good recovery results for complex targets and demonstrate robustness in different levels of turbid environments.
Similar content being viewed by others


Introduction
Underwater imaging in the visible light spectrum can provide rich details, including the color and structure of the detected targets. In recent years, with the introduction of new technologies and methods, the applications of visible light underwater imaging have become increasingly widespread1,2. Visible light imaging plays a crucial role in the detection and identification of underwater targets, underwater robotics, underwater rescue, marine biology monitoring, marine geological surveys, underwater archaeology, and real-time marine navigation3. However, visible light undergoes severe attenuation when propagating underwater4,5. Scattered light is generated as visible light passes through suspended particles in natural water bodies, and this scattered light mixes with the scattered light from the target entering the detector, leading to a significant degradation in image quality6,7, which hinders the application of these images.
To address this issue, several methods have been proposed. Li et al. introduced the histogram equalization method, which transforms the image histogram from a narrow unimodal distribution to an equalized distribution, thereby enhancing image contrast8. Building on the histogram equalization method, Selva Nidhyanandhan and colleagues proposed an underwater image enhancement method based on double stage gaussian filter and fusion (DSGF). This method uses DSGF and PCA image fusion techniques to restore images and improve their visual quality9. In recent years, the use of deep learning methods for underwater image restoration has garnered extensive research attention. Jiang et al. proposed a lightweight cascaded network-based approach for underwater image restoration. This method employs the lightweight cascaded network based on the Laplacian image pyramids to process underwater images, reducing the computational load of deep learning and achieving notable improvements in image visual quality10. Liu et al. introduced an underwater image restoration method using dual adversarial contrastive learning. This method utilizes a target-oriented dual adversarial contrastive learning approach for underwater restoration, achieving visually friendly and task-oriented enhancement, thereby improving both the visual quality and accuracy of the images11. However, the aforementioned methods do not consider the physical process of visible light scattering in water, which limits the extent of image restoration. Additionally, deep learning methods require a large number of image samples from real environments, which constrains the effectiveness and robustness of these methods. Restoration methods based on the physical model of underwater visible light propagation have garnered significant attention due to their high accuracy and strong restoration capabilities. Jules et al. developed an underwater image attenuation model based on the atmospheric attenuation model to describe the propagation process of visible light underwater. This method improves the quality of underwater images by adjusting the angle and power of the illumination light, while also reducing the intensity of scattered light, achieving ideal results12. However, it does not address the issue of light scattering interference during target imaging. Yoav et al. analyzed the degradation effects of particles on underwater images and found that these effects are mainly related to partial light polarization. Therefore, they introduced the polarization characteristics of light into underwater image restoration, which improved image contrast to a certain extent13. Huang et al. considered the polarization of reflected light from target objects and proposed an underwater image restoration method based on the estimation of target signal polarization difference images, enhancing the restoration effect for underwater metallic targets14. Amer et al. combined the dark channel algorithm with the underwater polarized light propagation model, reducing the algorithm’s running time and improving the robustness of image restoration15. Guan et al. used polarimetric laser range-gated imaging (p-RGI) system to enhance underwater target detection, the method offered a more effective solution for underwater imaging16.Yang et al. developed an imaging method based on active unpolarized illumination, capturing polarized images to enhance the contrast of underwater images. The approach avoids the polarization effects of signal light, improving accuracy in estimating veiling light17. Liu et al. proposed a distance-based Lambertian model based on polarization imaging method, the model enabled estimation of the intensity loss caused by water absorption and accurate target radiance recovery and improved image contrast and color accuracy18. Jin et al. proposes a polarimetric calculation method of global pixel for automatically estimating the DoP (Degree of Polarization) of the target light, enhanced the detail recovery and signal-to-noise ratio of underwater polarization images19. Xu et al. focused on the transmitting characteristics of the polarized lights under different conditions of water types and link distances and used the polarization retrieve method for reducing the scattering impact on the DoP of the light20. Huang et al. proposed a method of retrieving the object’s radiance based on estimating the polarized-difference image of the target signal, the method did not need prior information of the scene except a designated region of the background21. Some polarized imaging methods assume that the polarization degree of the target reflection light is a single value, thus often requiring an assumption about whether the target reflection light is polarized or unpolarized22,23,24. However, in practical applications, targets are often composed of different materials and have complex three-dimensional structures, giving rise to intricate polarization characteristics. these characteristics result in the possibility of multiple regions with varying degrees of polarization coexisting within the same scene. This complexity leads to significant estimation errors in some methods. Therefore, segmenting the target area and independently estimating the target’s reflected light polarization in each segment has become a method25,26. These approaches can effectively address the challenge of estimating the reflected light polarization of complex targets in traditional methods. However, they often rely on fixed partitioning based on polarization ranges or manual partitioning methods, lacking adaptability to different images. This limitation may result in insufficient effective segmentation, thus constraining the quality of image reconstruction.
In conclusion, existing methods are not effective in describing the polarization characteristics of complex targets, resulting in poor imaging outcomes. To address this issue, we propose an adaptive partition-based underwater polarization imaging method for complex objects. It establishes an image contribution operator to evaluate the extent to which each partition contributes to the quality improvement of image reconstruction. The image contribution operator consists of a region weighting operator and an error control operator, which respectively describe the size of the region and the polarization light component. Our method adaptively adjusts the range of each partition in the target image using the image contribution evaluation operator, enabling separate estimations of the target’s reflected light polarization for each partition. The results of experiments demonstrate that this method can achieve good restoration effects for complex targets.
Underwater polarization imaging model
In underwater imaging, the image is mainly composed of target-reflected light, forward-scattered light, and backward-scattered light. As shown in Fig. 1, the target-reflected light is the light that directly reflects from the target surface and enters the detector. The forward-scattered light is the light that scatters into the detector after the target-reflected light passes through impurity particles in the water. The backward-scattered light is the light emitted by the active light source, scattered by impurity particles, and then enters the detector13.

Underwater polarization imaging model.
The intensity of forward-scattered light is significantly lower than that of backward-scattered light. Considering that accounting for forward-scattered light significantly increases computational complexity, the latter is the primary cause of image quality degradation. Therefore, we neglect forward-scattered light26, and the light information acquired by the detector is as follows:
where \(I(x,y)\) represents the image directly acquired by the detector, \(T(x,y)\) is the target-reflected light, and \(B(x,y)\) is the backward-scattered light. According to Eq. (1), the polarization imaging system can obtain the two images with the highest and lowest brightness, expressed by the following formula:
\(I_{\max } \left( {x,y} \right)\) and \(I_{\min } \left( {x,y} \right)\) represent the images with the highest and lowest brightness. The formulas for calculating the polarization degrees of background scattered light and target-reflected light are derived from the formula for polarization degree, as follows:
where \(P_{scat} \left( {x,y} \right)\) is the polarization degree of background scattered light, and \(P_{tar} \left( {x,y} \right)\) is the polarization degree of target-reflected light. The total light intensity of the image can be obtained using formulas (2) and (3), as follows:
where \(I_{total} (x,y)\) is the total light intensity of the image. Based on formulas (2), (3), (4), and (5), the following formula can be derived:
According to formulas (6) and (7), the target-reflected light and the backward-scattered light can be determined as follows:
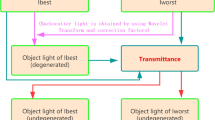
Therefore, according to the above reasoning, by solving for \(P_{tar} (x,y)\), \(P_{scat} \left( {x,y} \right)\), \(I_{{{\text{max}}}} (x,y)\), and \(I_{\min } \left( {x,y} \right)\), the restored image can be obtained as \(T(x,y)\). Filtering \(I_{\max } \left( {x,y} \right)\) with a frequency domain low-pass filter results in \(B_{{{\text{max}}}} (x,y)\)19 filtering \(I_{\min } \left( {x,y} \right)\) with a frequency domain low-pass filter results in \(B_{\min } (x,y)\), and \(P_{scar} (x,y)\) can be calculated based on formula (4). According to the Stokes parameters, calculate the degree of polarization \(P\) for the entire image2, \(P\) can provide reference for segmentation processing of the image in Chapter 3. The calculation process is as shown in the following formula.
where \(I\left( {0^{ \circ } ,0} \right)\), \(I\left( {45^{ \circ } ,0} \right)\), \(I\left( {90^{ \circ } ,0} \right)\), and \(I\left( {135^{ \circ } ,0} \right)\) are images of four polarization directions, \(I\) represents the total light intensity, \(Q\) and \(U\) are the intensity differences in the 0° and 90°, and 45° and 135° polarization directions, respectively. The degree of polarization in the image can be calculated based on formulas (10), (11), and (12) as follows:
Adaptive image partitioning method
Real-world objects often possess complex polarization characteristics. Therefore, it is necessary to perform adaptive segmentation on the target area to estimate the polarization degree of the reflected light from that area separately. Establishing image contribution evaluation factors to score each pixel and performing automatic region segmentation based on these scores. The size of the segmented regions and the degree of polarization of the target reflected light have a significant impact on the restoration of image details. The flowchart of the adaptive image partitioning method is shown in Fig. 2.

Adaptive partitioning algorithm model.
Model of the region size operator
The region size operator describes the proportion of pixels in the entire image corresponding to a particular polarization value. It calculates the weights of each partition based on the distribution of pixel quantities with polarization values on the image. To facilitate the calculation of accumulated pixels on polarization values, the precision of \(P(x,y)\) needs to be adjusted as follows:
In Eq. (14), rounding is applied to the portions of \(P(x,y)\) with precision less than 0.1, resulting in \(P_{i} (x,y)\). The number of pixels on each value in \(P_{i} (x,y)\) is then counted, denoted as \(P_{scatfind} \left( a \right)\):
\(a\) represents the bounded degree of polarization value, and \(n_{1}\) is the number of pixels in the image corresponding to the polarization value \(a\). According to formula (15), the region size operator \(A(x,y)\) can be obtained.
In Eq. (16), where \(m\) and \(n\) respectively represent the number of rows and columns of the polarization degree image matrix. The degree of polarization image (Fig. 3a), region size operator (Fig. 3b,c), and image Pixel accumulation on the polarization degree values (Fig. 3d) are shown in Fig. 3

(a) The image of the polarization degree. (b) The three-dimensional image of the region size operator. (c) The pseudo-color image of the region size operator. (d) Pixel accumulation on the polarization degree values.
Model of the error control operator
According to the definitions of \(I_{\max } \left( {x,y} \right)\) and \(I_{{{\text{min}}}} (x,y)\), the following formula can be derived:
where \(I_{p} \left( {x,y} \right)\) represents the polarized light component of the image, and \(I_{np} \left( {x,y} \right)\) represents the non-polarized light component in the image, according to formulas (14) and (15), we can obtain:
\(I_{p}\), \(I\), and \(P_{scat}\) can be obtained from the polarization image. According to formula (16), when \(P_{tar} > P_{scat}\), the estimated \(P_{tar}\) is smaller, \(\left| {P_{tar} - P_{scat} } \right|\) \(P_{tar}\) is smaller, and the value of T is larger. That is, when the estimated target reflection light polarization degree has a constant error with the true value, the closer \(P_{tar}\) is to \(P_{scat}\), the greater the error in the obtained \(T\). Therefore, the error control operator is established to calculate weights based on the polarization degree, where regions with lower polarization degrees will receive a higher number of partitions to improve the algorithm’s recovery performance in low-polarization target regions. The 3D image of the error control operator is shown in Fig. 4. The established error control operator formula is as follows:

The three-dimensional image of the error control operator.
Using contribution factors of image restoration for adaptive partitioning image restoration
After calculating the regional size operator and error control operator, according to formulas (16) and (20), we obtain the following:
\(R(x,y)\) represents the image contribution factor, \(A_{1}\) represents the adjustment factor used to control \(A\left( {x,y} \right)\) and \(E\left( {x,y} \right)\), and its specific value is determined experimentally. the weights of Based on \(R(x,y)\), the values are arranged in descending order, and the pixel coordinates are recorded to obtain matrix \(R_{1}\).
Matrix \(R_{1} \left( {x,y} \right)\) has three rows, with the number of columns equal to the total number of pixels in the image. Here, \(R_{1} \left[ 1 \right]\) represents the sorting of image contribution factors, \(R_{1} [2]\) represents the values of image contribution factors, and \(R_{1} [3]\) and \(R_{1} [4][4]\) represent the x and y values of pixels, respectively. Assuming the number of partitions is q (considering both algorithm effectiveness and computational efficiency, q is set to 6), the number of pixels in a unit area can be determined as:
\(q_{2}\) represents the number of pixels within a single partition. From this, the boundary conditions for each partition can be obtained:
\(Q_{1}\), \(Q_{2}\), \(Q_{3}\), \(Q_{{\text{n}}}\) represent the partitions corresponding to their respective indices, and \(n\) denotes the predefined number of partitions. The ranges for each partition are calculated from formula (25), as shown in Fig. 5:

Binarized image of partitions (selected regions are shown in white).
According to Eq. (9), employing the joint image evaluation method26 to estimate the optimal values of the target reflectance polarization for each partition, the target images for each partition are obtained. The final target image is as follows:
\(S_{1}\), \(S_{2}\), \(S_{3}\) and \(S_{n}\) represent the resulting images corresponding to the optimal degree of polarization of the reflected light from the target. The specific number of regions is determined experimentally. In experiments conducted with different numbers of regions, the changes in image evaluation metrics as a function of segment count are shown in Fig. 6. The figure also includes false-color images indicating the results for each segmented region. According to the experiments, we observed that as the number of regions increased, all evaluation metrics improved, indicating enhanced image quality. However, when the number of regions reached 7 or more, the improvement in image quality became limited. Therefore, considering both image restoration quality and algorithmic complexity, the number of regions in our method was set to 6.

Image quality variations with region count and false-color images of segmentation results.
The experiment and analysis of results
The experimental setup, as shown in Fig. 7, consists of a polarized detector, a polarized light source, a water tank, and the target object.

The image of experimental system.
The polarized detector used is the TRIO50S-QC model polarized camera from LUCID VISION LABS, equipped with a Sony IMX250 MYR image sensor. This camera is a four-channel polarization camera with a focal plane array, capable of simultaneously capturing polarized images at four different angles. The maximum pixel resolution of the images is 2448 × 2048. Due to the transmission characteristics of visible light in seawater, the attenuation of visible light in the blue-green bands is relatively small. Therefore, we mainly collected blue channel images from the scene information as experimental images. The polarized light source is composed of a light source and a linear polarizer. The light source is a white LED lamp with a power of 150W from Rawray, providing an illuminance between 6500 and 7000 lx. The dimensions of the water tank are 40 cm × 40 cm × 50 cm. The scattering medium of the experimental water consists of a mixture of water and milk, where the concentration of milk is used to simulate different scattering scenes. The milk contains casein molecules with diameters ranging from 0.04 to 0.3 μm and fat globules ranging from 1 to 20 μm. Many experiments have shown that milk can mimic the scattering characteristics of seawater25,27. In this study, a turbidity meter is used to measure the turbidity of the water after adding milk, and a turbidity index is used to quantify the scattering intensity of the scene.
Firstly, experiments are conducted on underwater complex targets scene under various scattering conditions, and the results of this method are compared with results from other methods to validate its superior effectiveness. The study confirms the adaptive nature of this method towards complex targets and its robustness under different concentrations. Experiment Scene 1 includes a gypsum material statue and a metal medal with a carved structure. According to the degree of polarization image for Scene 1 shown in Fig. 3a, it can be observed that the polarization degree of the reflected light in the gypsum statue area is low, while both high and low polarization regions of the reflected light from the metal medal coexist. Experiment Scene 1 simulates a scenario with targets exhibiting complex polarization characteristics in the environment. The purpose of setting up Experiment Scene 1 is to evaluate the restoration conditions and effects of different methods on such complex targets.
Four different polarization imaging methods are selected to verify the effectiveness of the proposed approach: Treibitz et al. proposed an active polarization-based method for enhancing visibility and estimating distances in scattering media, the method provided significant visibility enhancement23. Zhao et al. proposed a new polarization underwater imaging method. By scanning the DoP of the target light and the backscattered light with the genetic algorithm, the method effectively removed the scattering affect24. Li et al. proposed a multi-indicator reconstruction method for underwater polarization imaging, a multi-indicator reconstruction method for underwater polarization imaging, the method optimally fuses detail and structural layers using EME and MI indicators, with weight optimization via a genetic algorithm, enhancing underwater vision and robotic target detection28. In26, we proposed a previous algorithm based on the polarization characteristics of the target, which processes the image through fixed segmentation. We also employed a joint image evaluation method to fuse the results of each segment, significantly enhancing the detail and contrast of the restored images while correctly handling regions with different polarization degrees in the image, this method is hereafter referred to as “predecessor” in the following experiments.
As shown in Fig. 8, subjectively analyzing the five methods in the experiments of, the two scenes with low-concentration, they showed good performance. In the experiments of Scene 1 under medium, and high scattering conditions, the methods by Treibitz et al. , Zhao et al. and Li et al. had limitations in the restoration of complex targets, leading to estimation errors. Because these methods require the assumption that the target is either a non-polarized target or a highly polarized target, they cannot handle scenarios where both high-polarization and low-polarization regions coexist. The method proposed in this paper does not require assumptions about the polarization characteristics of the target. By employing a segmentation approach to separately process regions with different polarization characteristics, it achieves a better restoration effect. In comparison to the previous method, the proposed method in this paper exhibited noticeable visual improvements. Additionally, the proposed method showed advantages in recovering low-contrast targets in various environments, effectively restoring many details on the gypsum figure. In the experiments of Scene 2 under medium and high scattering conditions, our method also achieved good recovery for objects with different polarization characteristics, such as coins and rulers.

The image comparing the experimental results of our method with other methods for underwater scenes.
In Fig. 9, magnified images of the low-polarization regions in the experimental scene are shown. As seen in Fig. 3a, the gypsum statue is a classic low-polarization object, and due to its surface structure, the polarization degree is inconsistent across different parts. Analyzing Fig. 9, it can be observed that our method successfully restores many details of the target across three scattering concentrations, demonstrating a certain degree of robustness. The Trebitz method loses information about the gypsum statue in scenes with NTU16 and NTU28 turbidity. Zhao’s method recovers partial information of the target in the experimental scene, but due to the non-uniform polarization degree of the low-polarization object, it fails to effectively restore certain details of the target. Li et al.'s method exhibits estimation errors for the gypsum statue in the NTU28 scene, leading to overexposure in some areas and failing to accurately restore target details. Compared to the Predecessor method, the improvements in our approach are effective, with a further enhancement in the restoration of target details in the image.

Magnified images of the low-polarization region in the scene.
As shown in Table 1, the results of our method and other methods have been evaluated for image quality assessment. Evaluation metrics include Enhancement Measure Evaluation (EME)29, Natural Image Quality Evaluator (NIQE)30, Standard Deviation (STD), and Information Entropy19. EME is a representation of the local grayscale variations in an image. NIQE is a no-reference perceptual evaluation model, A lower value of NIQE indicates a more natural image. Information entropy measures the amount of information contained in an image. The four evaluation metrics used in this study characterize the image restoration effect from multiple perspectives. From Table 1, it can be observed that our method outperforms previous methods and the approaches by Treibitz et al., Zhao et al. and Li et al. In image quality evaluation metrics such as EME, NIQE, and information entropy. This indicates that our method restores more image information compared to other methods, resulting in a more natural overall image appearance and stronger image details.
In terms of the contrast evaluation metric, our method performs lower than that of Treibitz et al. and Zhao et al. From Fig. 8 and the magnified images, it can be observed that the Predecessor method shows limitations in restoring the edges between the metal medal and the background, resulting in detail loss and underexposure in that region. The Trebitz method failed to correctly restore the gypsum statue under the scattering concentrations of NTU16 and NTU28, leading to extremely low brightness in that area. In Zhao’s method, the gypsum statue area suffered from overexposure. Our method successfully restored the details of the gypsum statue, metal medal, and other objects across all three different scattering concentrations. According to the principle of contrast calculation, this also explains why our method shows some limitations in the contrast evaluation metrics. Based on the data in Table 1, the statistical graphs for Scene 1 (Fig. 10) an(1)d Scene 2 (Fig. 11) are plotted. It can be visually observed that our method outperforms other methods in most metrics. Moreover, our method exhibits certain robustness across both scenes and different scattering conditions. It demonstrates good restoration effects on various image quality evaluation metrics. As shown in Fig. 12, compared to our previous method, the Adaptive image partitioning method in this paper are more reasonable, and the image quality is also improved.

Line graph of evaluation metrics for Scenario 1 experiment images.

Bar graph of evaluation metrics for Scenario 2 experiment images.

Comparison between the previous methods and our method in segmenting the experimental image regions of Scene 1..
As shown in Fig. 12, a comparison is made between the segmentation regions of the experimental images in Scene 1 using previous methods and our method. The previous methods utilize fixed polarization value ranges to partition the images, lacking adaptive adjustments, resulting in some regions with no pixels and limitations in image detail restoration. In contrast, our method uniformly and adaptively partitions each region, preserving image details and enhancing the restoration effect.
As shown in Fig. 13, we compared the computational efficiency of our method with other methods. Efficiency here is represented by the ratio of the EME evaluation metric to computation time. A higher value indicates better image quality improvement per unit time. The data used in Fig. 13 are the average values from the experimental data of Scene 1. From the analysis of Fig. 13, it can be seen that our method outperforms Trebitz, Li and Zhao in terms of computational efficiency, slightly lagging behind our predecessor algorithm. Combining the objective evaluation metrics in Table 1 and the subjective performance in Figs. 8 and 9, we conclude that our method effectively improves the relevant evaluation metrics and subjective performance compared to the predecessor method, without significantly reducing computational efficiency.

Comparison of the computational efficiency between our method and other methods.
Conclusion
In this paper, an adaptive partition-based underwater polarization imaging method for complex objects is presented. The method involves constructing an image contribution operator to adaptively partition target images with complex polarization characteristics. The image contribution operator considers both the pixel quantity and polarization characteristics of the segmented regions, enabling individual estimation of the target reflection polarization for each region. This approach addresses the issue of poor recovery of complex polarized target images.
The experimental results indicate that compared to existing methods of the same kind, this approach achieves better recovery quality for complex targets, capturing more target detail information. It also demonstrates good robustness across various degrees of turbid environments. The method holds potential applications for underwater polarized detection image restoration in real-world scenarios.
Data availability
The datasets used and/or analysed during the current study available from the corresponding author on reasonable request.
References
Jaffe, J. S. Underwater optical imaging: The past, the present, and the prospects. IEEE J. Oceanic Eng. 40(3), 683–700 (2015).
Raveendran, S., Patil, M. D. & Birajdar, G. K. Underwater image enhancement: A comprehensive review, recent trends, challenges and applications. Artif. Intell. Rev. 54(7), 5413–5467 (2021).
Ali, U. & Mahmood, M. T. Underwater image restoration through regularization of coherent structures. Front. Mar. Sci. 9, 1–8 (2022).
Weidong, Z., Lili, D. & Wenhai, X. Retinex-inspired color correction and detail preserved fusion for underwater image enhancement. Comput. Electron. Agric. 192, 106585 (2022).
Ji, T. & Wang, G. An approach to underwater image enhancement based on image structural decomposition. J Ocean Univ. China 14, 255–260 (2015).
Cheng, Q. & Wang, Y. Influence of the complex refractive index of underwater suspended particles on the transmission characteristics of polarized light. IEEE Access 1–1 (2020).
Haofeng, H. et al. Polarimetric underwater image recovery via deep learning. Opt. Lasers Eng. 133, 106152 (2020).
Li, C. & Zhang, X. Underwater image restoration based on improved background light estimation and automatic white balance. In Oct 2018 11th International Congress on Image and Signal Processing, BioMedical Engineering and Informatics (CISP-BMEI), Beijing, China, 1–31(2018).
Malathi, V. & Manikandan, A. An enhancement of underwater images using DCP and CLAHE algorithm. Int. J. Eng. Adv. Technol. 9(2), 2805–2813 (2019).
Jiang, N. et al. Underwater image enhancement with lightweight cascaded network. IEEE Trans. Multimed. 24, 4301–4313 (2022).
Liu, R. et al. Twin adversarial contrastive learning for underwater image enhancement and beyond. IEEE Trans. Image Process. 1–1 (2022).
Zhuang, P. et al. Underwater image enhancement with hyper-Laplacian reflectance priors. IEEE Trans. Image Process. 1–1 (2022).
Schechner, Y. Y. & Karpel, N. Recovery of underwater visibility and structure by polarization analysis. IEEE J. Ocean. Eng. 30(3), 570–587 (2005).
Xu, Q. et al. A novel method of retrieving the polarization qubits after being transmitted in turbid media. J. Opt. 17(3), 035606 (2015).
Guan, J. & Zhu, J. Target detection in turbid medium using polarization-based range-gated technology. Opt. Express 21(12), 14152–14158 (2013).
Guan, J.-G., Zhu, J.-P. & Tian, H. Polarimetric laser range-gated underwater imaging. Chin. Phys. Lett. 32(7), 074201 (2015).
Yang, L. et al. Underwater polarimetric imaging for visibility enhancement utilizing active unpolarized illumination. Opt. Commun. 438, 96–101 (2019).
Liu, F. et al. Polarization-based exploration for clear underwater vision in natural illumination. Opt. Express 27(3), 3629–3641 (2019).
Jin, H. et al. Polarimetric calculation method of global pixel for underwater image restoration. IEEE Photonics J. 13(1), 1–15 (2020).
Xu, Q. et al. Transmitting characteristics of polarization information under seawater. Appl. Opt. 54(21), 6584 (2015).
Huang, B. et al. Underwater image recovery considering polarization effects of objects. Opt. Express 24(9), 9826 (2016).
Amer, K. O. et al. Enhancing underwater optical imaging by using a low-pass polarization filter. Opt. Express 27(2), 621 (2019).
Treibitz, T. & Schechner, Y. Y. Active polarization descattering. IEEE Trans. Pattern Anal. Mach. Intell. 31(3), 385–399 (2009).
Yuanzhi, Z. et al. Polarization descattering imaging through turbid water without prior knowledge. Opt. Lasers Eng. 148, 106777 (2022).
Li, R. et al. Polarization parameter partition optimization restoration method for underwater degraded image. Guangxue Jingmi Gongcheng/Opt. Precis. Eng. 31(20), 3010–3020 (2023).
Li, R. et al. Underwater polarization image restoration based on a partition method. Opt. Eng. https://doi.org/10.1117/1.OE.62.6.068103 (2023).
Wang, Y. et al. Principle and implementation of stokes vector polarization imaging technology. Appl. Sci. 12(13), 6613 (2022).
Li, R. et al. Multi-Indicator reconstruction for underwater polarized image dehazing method. Opt. Lasers Eng. 181, 108333–108333 (2024).
Agaian, S. S., Panetta, K. & Grigoryan, A. M. Transform-based image enhancement algorithms with performance measure. IEEE Trans. Image Process. 10(3), 367–382 (2001).
Mittal, A., Soundararajan, R. & Bovik, A. C. Making a “completely blind” image quality analyzer. IEEE Signal Process. Lett. 20(3), 209–212 (2013).
Yu, T. et al. Underwater polarization imaging for visibility enhancement of moving targets in turbid environments. Opt. Express 31(1), 459–459 (2022).
Funding
Funding was provided by Dalian Science and Technology Bureau (Grant no. 2022RJ03), Liaoning Provincial Natural Science Foundation of China (Grant no. 2024BS198) and Fundamental Research Funds for the Provincial Universities of Liaoning (Grant no. LJ212410150053).
Author information
Authors and Affiliations
Contributions
S.Z: conceptualization, methodology, software, data curation, writing- original draft preparation. R.L: supervision Y.F: visualization, investigation H.C: software D.W: software, validation R.Z: editing.
Corresponding author
Ethics declarations
Competing interests
The authors declare no competing interests.
Additional information
Publisher’s note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution-NonCommercial-NoDerivatives 4.0 International License, which permits any non-commercial use, sharing, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if you modified the licensed material. You do not have permission under this licence to share adapted material derived from this article or parts of it. The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by-nc-nd/4.0/.
About this article

Cite this article
Zhang, S., Li, R., Fan, Y. et al. Adaptive partition based underwater polarization image restoration method for complex objects. Sci Rep 15, 40410 (2025). https://doi.org/10.1038/s41598-025-93827-3
Received:
Accepted:
Published:
Version of record:
DOI: https://doi.org/10.1038/s41598-025-93827-3
