
Abstract
Strata structure is an important factor affecting floor heave of deep soft rock roadway, however, the mechanism of floor heave induced by the rock structure has not been fully understood, so it is still necessary to study the floor heave of deep-buried roadway under different rock structure conditions.Thus providing further theoretical basis and scientific basis for the control of surrounding rock in mine tunnels. In order to study the floor heave mechanism of soft rock roadway deep-buried roadway excavated in soft rock of gently inclined thin strata, a physical model experiment based on the engineering geological conditions of typical mine roadway was carried out. During the experiment, CCD camera and strain acquisition system were employed to collect image data and strain data. Based on the analysis of the experimental results, the following conclusions are drawn: (1) For the soft rock roadway located in deep-buried thin rock stratum, horizontal stress is an important factor affecting the floor heave of roadway; (2) When the floor heave occurs in the roadway, the strain distribution of floor of roadway is funnel-shaped, the max VME strain value of the floor is near 0.19, the affected range of floor strata is about half of the roadway width; (3) The surrounding rock within one time of the tunnel diameter is in the state of tensile stress after the process of roadway floor heave failure, and the areas of tensile stress and compressive stress in the surrounding rock alternates around the roadway; The failure mechanism of floor heave of the roadway is the fracture and uplift of the floor of roadway. Besides, a numerical model was conducted to verify the results of the physical model, the results of numerical simulation are in good agreement with those of physical model.
Similar content being viewed by others

Introduction
At present, in China, most mines have already entered the stage of deep mining. Numerous roadways situated in deep soft rock are confronted with many engineering problems. Floor heave is a prevalent engineering issue in deep soft rock roadways. the deformation of soft rock roadway caused by floor heave is a major challenge for coal mines in China western mining areas1. Floor heave seriously affects the safety and efficient mining of the deep mines2,3. In order to solve the problem of floor heave in soft rock roadways, many experts and scholars have carried out a lot of research work to study the mechanism of floor heave in deep soft rock tunnel.
For the soft rock roadways with good lithology and obvious layered structurecharacteristics in the bottom rock layer, some scholars believe that the floor heave are caused by the release of energy release accumulated in the bottom rock layer due to the redistribution of surrounding rock stress caused by tunnel excavation4,5,6. Some other scholars believe that the mechanism of bottom plate uplift is due to the joint action of roof pressure transferring to the bottom through two sides and upward movement of the bottom layer. The floor layer of roadway undergoes bending deformation towards the free surface, when the bending deformation of floor layer reaches its maximum value, the floor layer breaks and rises upwards7,8,9,10,11,12,13,14. Based on the stress characteristics and structural characteristics of the layered soft rock roadway, a thin plate mechanical model15, a beam mechanical model16,17 and a three-hinged arch-spring model18 have been established.
For the soft rock roadways with low rock strength and incomplete structure of the floor layer, some experts believe that the floor heave is mainly caused by the compression flow and shear displacement of the floor layer under horizontal stress, which leads to the uplift of the floor layer towards free surface of the roadway19,20,21,22,23. Based on the soil pressure theory, a mechanical model for the floor heave of soft rock tunnels has been established24,25. Some experts have also found that the floor heave of soft rock roadways is caused by water absorption expansion26,27,28, creep deformation29,30 advanced support pressure of the working face31.To summarize, floor heave in layered soft rock roadway primarily occurs due to the bending, fracturing, compression, and shear displacement of the floor rock under the influence of surrounding rock stress. The suction, softening, expansion and mining-induced disturbance pressure exacerbate the floor heave. In general, the floor heave of layered soft rock roadways is a gradual development process32 and the deformation is relatively large.
The influence of rock structure elements on the floor heave of soft rock roadways also can not be ignored, such as rock type, thickness, and inclination angle33,34,35.In order to explore the mechanical mechanism of floor heave that occurs in thin layered soft rock tunnels, a physical model experiment as well as a numerical simulation test were carried out so as to reproduce the process of floor heave in the tunnels36,37,38.
Model test
Prototype of physical model
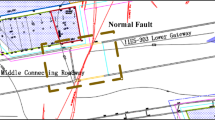
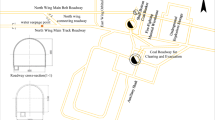
A roadway was chosen as the prototype of which was located in Shi Yakou Coal Mine, in Yunnan province, east of China. The depth of roadway is about 750 m. The angle of stratum was near 10°. A detailed stratum histogram is showed in Fig. 1. The physical and mechanical parameters of rocks were shown in Table 1. There are some problems in this roadway, such as floor heave, serious shrinkage of sidesandroof. Floor heave is a main problem of this roadway.

Stratum histogram.
Model building
Simulation material and similarity analysis are very important for model tests. A good rock’s simulation material was used to build the physical model. The simulation material is made by quartz powder, plaster, barite powder, water and talcum powder. Different artificial rocks can be made by the simulation material. In this case, it was used to make three types artificial rocks, namely siltstone, coal and mudstone. The ratio of artificial siltstone is 0.609 (barite powder):0.156 (quartz powder):0.097 (plaster): 0.010 (talcum powder): 0.128 (water) in mass. The ratio of artificial coal is 0.489 (barite powder): 0.146 (quartz powder): 0.085 (plaster): 0.089 (talcum powder): 0.191 (water) in mass. The ratio of artificial mudstone is 0.548 (barite powder): 0.168 (quartz powder): 0.068 (plaster): 0.069 (talcum powder): 0.147 (water) in mass. The physic-mechanical parameters of artificial rock are listed in Table 2.
According to some studies, we found that stress similarity constant Cσ, geometric dimension similarity constant Cl and body force similarity constant Cγ are key similar parameters for physical model experiments. Besides, the following similarity index requirement should be met:
According to the similarity simulation theory, similarity constants were determined by analyzing actual geological conditions of roadway and the conditions of laboratory. The parameters of Cσ, Cγ, and Cl were 0.065, 0.065 and 1.00 respectively. A physical model was built by the artificial siltstone, artificial coal and artificial mudstone.
Data acquisition scheme
The MatchID-2D strain measurement system was adopted to acquire the full-field deformation data of monitored area (as showed in Fig. 2a, the resolution of this strain measurement system is 0.01 pixel. And a video camera was used to record the process of physical model. Besides, there were 39 points of strain data monitoring located in the physical model (as showed in Fig. 2b. Every monitoring point was placed one strain gauges which was perpendicular to the direction of strata inclination (the normal). The arrangement of equipment data collection equipment was shown in Fig. 3.

Data acquisition location of strain and deformation.

This is a figure. Schemes follow the same formatting.
Experiment schemes
20 kN/m3 has been chosen as the average unit weight of the rock according to our engineering experience, and 1 was chose as the lateral pressure coefficient by the empirical formula. Thus, the initial gravity stress of rock mass and the initial horizontal tectonic stress are both 15 MPa at the depth of 750 m. Because the stress similarity constant Cσ is 0.065, the physical model was applied 1.00 MPa at the top and the lateral sides to simulate the initial stress of rock mass.
The physical model experiment consisted of three stages, stage A, stage B and stage C. The stage A included five processes, A1, A2, A3, A4 and A5. During the A1, A2 A3, A4 and A5, 0.2 MPa was applied to the physical model at the top and the lateral sides respectively. The stage B included eights processes, B1, B2, B3, B4, B5, B6, B7 and B8. During the B1, B2, B3, B4, B5, B6, B7 and B8, 50 mm was excavated in the method of full-face excavation. The Stage C was one process. During the stage C, 0.4 MPa additional loading was applied to the top of physical model. The detailed loading scheme was showed in Fig. 4.

Loading scheme of the experiment.
Results and discussion
Deformation analysis
Floor heave occurred during the loading process of stage C. We paid more attention to some typical pictures of the process of floor heave. The von mises equivalent strain of surrounding rock in monitoring area was obtained by processing those typical pictures (as showed in Fig. 5). The color represents the size of the von mises equivalent strain and the small black arrow on the picture represents the direction of the displacement vector. In the following, VME strain is used to represent von Mises equivalent strain. As showed in Fig. 5a, the VME strain value of whole monitoring area is very small. As showed in Fig. 5b, The VME strain value of floor below the roadway began to increase. As showed in Fig. 5c, the VME strain of floor below the roadway increased, the maximum VME strain value of floor reaches 0.06. Then, the VME strain value of floor continue to increase, the maximum VME strain value of floor reaches 0.08 (As showed in Fig. 5d). After, the phenomenon of separation of floor stratum occurs, the area where the VME strain value increases is funnel-shaped, the maximum VME strain value of floor is 0.15(As showed in Fig. 5e). Last, the floor strata were broken and serious floor heave occurred, the VME strain value of floor strata obviously increased and the range of strain increase is enlarged, the maximum VME strain value of floor is near 0.19(As showed in Fig. 5f).

The von mises equivalent strain of surrounding rock in monitoring area.
After conducting the aforementioned analysis, it becomes evident that the failure mechanism of roadway floor heave lies in the fracture and uplift of the floor. The strain distribution of surrounding rock exhibits a funnel-shaped pattern, with a VME strain value for the floor approaching 0.19. It is worth noting that horizontal stress serves as the primary factor contributing to floor heave in thin layer soft rock roadways.
Strain analysis
The strain field of surrounding rock during the process of floor heave of roadway is obtained (as showed in Fig. 6). The area with positive value in the picture represents that the area is under tension, and the negative value area indicates that the area is under pressure.

The strain field of surrounding rock during the process of floor heave of roadway.
At first, there is a circular tensile strain zone at the lower left corner of the roadway, and the maximum tensile strain is 550 micro strain, which indicates that the zone is in a tensile stress state (as showed in Fig. 6a). The tensile strain in the lower left corner of the roadway increases to 800. At the same time, a button shaped tensile strain area also appears in the right bottom corner of the roadway, the maximum value of the tensile strain is about 450 micro strain. It indicates that the left bottom corner and the right bottom corner of the roadway are in a state of tensile stress (as showed in Fig. 6b).
The strain within the range of one tunnel diameter around the tunnel is still dominated by compressive strain. There is an arched tensile strain area on the roof of the tunnel, and the maximum tensile strain is about 1800 micro strains. It showed that the rock mass in these areas is in the tensile strain area. At the same time, there is a compressive strain circle around the tunnel, which indicates that the rock mass in these areas is in the state of compressive stress. Besides, there is a spherical tensile strain zone at the top right of the roadway, and the maximum tensile strain is 1500 micro strain (as showed in Fig. 6c). There is an arched tensile strain zone at the position of the floor rock under the roadway and the maximum tensile strain is 1600 micro strain. Besides, A circular compressive strain zone appears at a distance of 1 times the tunnel diameter below the tunnel, and the maximum value of compressive strain is about 1100 micro strain.
After conducting the aforementioned analysis, it can be deduced that the surrounding rock undergoes a state of tensile stress within a time range equivalent to the diameter of the roadway subsequent to its floor heave collapse process. Moreover, there is an alternating occurrence of tensile stress zones and compressive stress zones in close proximity to the roadway.
Numerical simulation
Modeling building
A numerical model was built by 3DEC(as showed in Fig. 7). The size of the numerical calculation model is 1.6 m×1.6 m×0.4 m, which is consistent with the size of the physical model experiment. The numerical model contains 2572 blocks and 168,068 grid units. The boundary conditions were same with the physical model test. The failure criterion was Mohr– coulomb.

Calculation model.
Numerical results
The displacement field of the surrounding rock of the tunnel is shown in Fig. 8a. The positions with significant displacement changes are located in the right foot area and the left shoulder area of the tunnel. The maximum displacement in the right foot area is 47 mm, and the maximum displacement in the left shoulder area is 43 mm. The deformation of the two sides of the tunnel has also increased. The displacement deformation of four key measurement points was obtained, among which the displacement deformation of 1 # measurement point was 31 mm, the displacement deformation of 2 # measurement point was 43 mm, the displacement deformation of 3 # measurement point was 20 mm, and the displacement deformation of 4 # measurement point was 21 mm. The failure mode of the surrounding rock of the tunnel is shown in Fig. 8b. The roof rock of the tunnel undergoes a certain degree of bending deformation downwards, and the floor rock of the right foot area of the tunnel undergoes a significant bending deformation upwards. The fracture occurs at the position with the maximum bending deformation, and separation from the lower rock layer results in separation.

Defomation of surrounding rock.
The displacement data of the observation points of the numerical simulation test and the physical model test were compared and analyzed (as shown in Fig. 9), and it was found that the displacement values of the 1 # and 3 # observation points differed by 3 mm, the displacement values of observation points 2 # and 4 # differ by 2 mm. The displacement data of the four key monitoring points in the numerical simulation experiment are in good agreement with the displacement data of the four key monitoring points in the model experiment.

Displacement of monitoring point.
Conclusions and progress
-
(1)
For the soft rock roadway located in deep-buried thin bedded rock stratum, horizontal stress is an important factor affecting the floor heave of roadway.Thus providing further theoretical basis and scientific basis for the control of surrounding rock in mine tunnels.
-
(2)
When the floor heave occurs in the roadway, the strain distribution of floor of roadway is funnel-shaped, the max VME strain value of the floor is near 0.19, the affected range of floor strata is about half of the roadway width.
-
(3)
The surrounding rock within one time of the tunnel diameter is in the state of tensile stress after the process of roadway floor heave failure, and the areas of tensile stress and compressive stress in the surrounding rock alternates around the roadway. The failure mechanism of floor heave of the roadway is the fracture and uplift of the floor of roadway.
-
(4)
The study of soft rock roadway under complex geological conditions remains inadequate. The next step will involve simulating and analyzing the behavior of soft rock roadways under various endowment states to effectively control the failure mechanism associated with floor fractures and uplift.
Data availability
The datasets used and/or analysed during the current study available from the corresponding author on reasonable request.
Change history
28 March 2026
The original online version of this Article was revised: In the original version of this Article the Funding section was omitted. The Funding section now reads “This research was funded by the National Natural Science Foundation of China (Grant no. 52064042), the China Postdoctoral Science Foundation (Grant no. 2023MD734191), the Natural Science Foundation of Inner Mongolia Autonomous Region for Excellent Young Scholars (Grant no. 2025YQ013), the Program for Young Talents of Science and Technology in Universities of Inner Mongolia Autonomous Region (Grant no. NJYT24040), the Henan Provincial Science and Technology Research Project (Grant No. 262102320013), the Fundamental Research Funds for Inner Mongolia University of Science & Technology (Grant no. 2023QNJS112).” The original article has been corrected.
References
Wen, Z., Jing, S., Meng, F. & Jiang, Y. Control technology for floor heave of jurassic soft rock in the Erdos basin of China: A case study. J. Cent. South. Univ. 29, 4051–4065 (2023).
Ou, X., Ouyang, L., Xu, X. & Wang, L. Case study on floor heave failure of highway tunnels in gently inclined coal seam. Eng. Fail. Anal. 106224 (2022).
Zhang, B., Tao, Z., Guo, P., Yang, K. & Yang, Y. Model test on deformation and failure mechanism of tunnel support with layered rock mass under high ground stress. Eng. Fail. Anal. 150 (2023).
Deng, P. & Liu Q. A new floor heave mechanism considering the influences of the in-situ stress lateral coefficient and rock tensile strength. Eur. J. Environ. Civ. Eng. 27, 4279–4310 (2023).
Li, J. et al. Failure characteristics induced by unloading disturbance and corresponding mechanical mechanism of the coal-seam floor in deep mining. Arab. J. Geosci. 14 (2021).
Meng, N., Bai, J. & Yoo, C. Failure mechanism and control technology of deep soft-rock roadways: numerical simulation and field study. Undergr. Space. 12, 1–17 (2023).
Ma, K., Zhang, J., Zhang, J., Dai, Y. & Zhou, P. Floor heave failure mechanism of large-section tunnels in sandstone with shale stratum after construction: A case study. Eng. Fail. Anal. 140 (2022).
Li, D., Peng, Z., Zhu, Q., Ma, J. & Gong, H. Experimental study on the floor heave and failure process of rock samples under biaxial step loading. Appl. Sci. 13 (2023).
Jian, S. & Desen, K. Floor heave mechanism and anti-slide piles control technology in deep and large-span chamber. Appl. Sci. 11, 4576–4576 (2021).
Yang, R., Zhu, Y., Li, Y. & Li, W. Floor heave mechanism and control measures of layered floor in weakly cemented soft rock roadway. J. Min. Saf. Eng. 37, 443–450 (2020).
Sun, X., Miao, P., Shen, F., Zhao, W. & Yang, M. Study on floor heave mechanism of horizontal layered soft rock roadway in deep well under different stress States. J. Min. Saf. Eng. 35, 1099–1106 (2018).
Sun, X. et al. Physical modeling of floor heave for the deep-buried roadway excavated in ten degree inclined strata using infrared thermal imaging technology. Tunn. Undergr. Space Technol. Incorporating Trenchless Technol. Res. 63, 228–243 (2016).
Mo, S. et al. A new coal mine floor rating system and its application to assess the potential of floor heave. Int. J. Rock. Mech. Min. Sci. 128, 104241–104241 (2020).
Mo, S. et al. A numerical investigation into floor buckling mechanisms in underground coal mine roadways. Tunn. Undergr. Space Technol. Incorporating Trenchless Technol. Res. 103 (2020).
Kang, H. Mechanism and prevention of floor heave in soft rock roadway. China Coal Ind. Publ. House, Beijing (1993).
Hua, X. & Li, Y.-f. Mechanics analysis on floor deformation of gob-side entry retaining and prevention and control of floor heave. J. China Coal Soc. (2016).
Zhu, L. et al. Research on floor heave mechanisms and control technology for deep dynamic pressure roadways. Processes 11, 467–467 (2023).
Xu, X. et al. Asymmetric floor heave mechanism and pressure relief control in composite bottom-slab roadways based on thethree-hinged arch-springmodel. Rock. Mech. Rock. Eng. 42, 1421–1433 (2023).
Shang, D. et al. Stress-relief–anchor-grouting, a collaborative control technology for severe extrusion floor heave in a deep roadway: A case study. Sustainability 15, 13053 (2023).
Feng, J. et al. Study on failure mechanism and treatment measures of floor heave of high-speed railway tunnel in the interbedded surrounding rock with high geostress. Eng. Fail. Anal. 150, 107365 (2023).
Yang, X. et al. Study on floor heave characteristics and the control method of gob-side entry driving in weakly cemented soft rock. Sustainability 15, 3969 (2023).
He, F. et al. Study on mechanism and control technology of asymmetric floor heave in a deep soft rock main roadway. Geofluids 1149000 (2022). (2022).
Zhou, X. et al. Research on theory and technology of floor heave control in semicoal rock roadway: Taking longhu coal mine in qitaihe mining area as an example. Lithosphere 3810988 (2022). (2022).
Shi, J. & Kong, D. Floor heave mechanism and anti-slide piles control technology in deep and large-span chamber. Appl. Sci. 11, 4576 (2021).
Lai, X. et al. Research on mechanism and control of floor heave of mining-influenced roadway in top coal caving working face. Energies 13, 381 (2020).
Ivan, S. & Svitlana, S. Numerical studies of floor heave mechanism and the effectiveness of grouting reinforcement of roadway in soft rock containing the mine water. Int. J. Rock. Mech. Min. Sci. 170 (2023).
Wang, T. et al. Numerical study on the deformation and failure of soft rock roadway induced by humidity diffusion. Tunn. Undergr. Space Technol. 126, 104565 (2022).
Zheng, P., Chen, W., Tan, X. & Dai, Y. Study of failure mechanism of floor heave and supporting technology in soft rock of large deformation roadway. Chin. J. Rock. Mech. Eng. 34, 3143–3150 (2015).
Jia, S. et al. Experimental and numerical analysis of deformation and failure behaviour for deep roadways in soft rocks. Bull. Eng. Geol. Environ. 81, 466 (2022).
Liang, Q., Yue, J., Zhou, W., Sun, W. & Li, J. Influence of surrounding rock creep on invert heave of high-speed railway tunnel in mudstone. J. Rail Way Eng. Soc. 41, 80–85 (2024).
Cheng, H. et al. Study on floor heave mechanism and control technology of roadway based on slip line field theory. J. Min. Sci. Technol. 6, 314–322 (2021).
Liu, Q. & Huang, X. Progressive fracture and swelling deformation of tunnel floor: a new floor heave mechanism. Rock. Soil. Mech. 44, 1512–1529 (2023).
Sun, X. et al. Physical modeling of floor heave for the deep-buried roadway excavated in ten degree inclined strata using infrared thermal imaging technology. Tunn. Undergr. Space Technol. 63, 228–243 (2017).
Lu, J., Wang, M., Wang, K. & Zheng, C. Mechanism and analytical method of bottom drum in horizontal layered mudstone railway tunnel. J. Railw Sci. Eng. 20, 1761–1773 (2023).
Zhu, D., Yu, B., Wang, D. & Zhang, Y. Fusion of finite element and machine learning methods to predict rock shear strength parameters. J. Geophys. Eng. 21, 1183–1193 (2024).
Qiang et al. Combined blasting for protection of gob-side roadway with Thick and hard roof. J. Rock Mech. Geotech. Eng. 16, 8 (2024).
Chun et al. Failure behavior and strength model of blocky rock mass with and without rockbolts. Int. J. Min. Sci. Technol. 34, 6 (2024).
Li, G. et al. Energy balance support method in soft rock tunnel with energy absorbing anchor cable. In Tunnelling and Underground Space Technology incorporating Trenchless Technology Research vol. 141. (2023).
Funding
This research was funded by the National Natural Science Foundation of China (Grant no. 52064042), the China Postdoctoral Science Foundation (Grant no. 2023MD734191), the Natural Science Foundation of Inner Mongolia Autonomous Region for Excellent Young Scholars (Grant no. 2025YQ013), the Program for Young Talents of Science and Technology in Universities of Inner Mongolia Autonomous Region (Grant no. NJYT24040), the Henan Provincial Science and Technology Research Project (Grant No. 262102320013), the Fundamental Research Funds for Inner Mongolia University of Science & Technology (Grant no. 2023QNJS112).
Author information
Authors and Affiliations
Contributions
Conceptualization, F.C. and E.W.; methodology, F.C.; software, E.W. and C.Z.; validation C.M. and X.S.; formal analysis, E.W.; investigation, F.C. and P.S.; resources, C.M. and X.S.; data curation, F.C.; writing—original draft preparation, F.C. and E.W.; writing—review and editing, X.S., F.C. and E.W.; visualization, C.Z.; supervision, X.S.; project administration, P.S.; funding acquisition, E.W and F.C. All authors have read and agreed to the published version of the manuscript.
Corresponding author
Ethics declarations
Competing interests
The authors declare no competing interests.
Additional information
Publisher’s note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution-NonCommercial-NoDerivatives 4.0 International License, which permits any non-commercial use, sharing, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if you modified the licensed material. You do not have permission under this licence to share adapted material derived from this article or parts of it. The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by-nc-nd/4.0/.
About this article

Cite this article
Chen, F., Wang, E., Miao, C. et al. Physical model study on the mechanism of floor heave for the deep-buried roadway excavated in soft rock of gently inclined thin strata. Sci Rep 16, 9557 (2026). https://doi.org/10.1038/s41598-025-95299-x
Received:
Accepted:
Published:
Version of record:
DOI: https://doi.org/10.1038/s41598-025-95299-x
