
Abstract
This article addresses the optimization of the challenging electric vehicles (EVs) charging and discharging schedules in distribution networks, focusing on the needs of EV aggregators and household EV users. To contribute to this problem solving, a multi-objective framework for EV demands response in power systems, optimizing charging and discharging schedules while considering maximum load-handling capacity and EV users’ state of charge (SoC) satisfaction as constraints are proposed. The framework employs a vehicle-to-grid (V2G) approach to achieve these goals. The proposed model, centered on aggregators and EV users, tackles issues such as power loss reduction, voltage profile enhancement, and optimal EV charging and discharging scheduling to maximize system performance. For this aim, we address this problem as a multi-objective optimization one using a linear weighted sum technique to simultaneously address the framework objectives. To tackle the optimization problem, a metaheuristic swarm intelligence algorithm, the Red Deer Algorithm (RDA), is utilized to determine the optimal EV charging and discharging timings. The efficiency of the proposed method on a IEEE 69-bus system is tested. The experiment simulates residential EV loads using two sets of different EVs; The first set included Tata Nexon, BYD Seal and Hyundai Ioniq and the second set included Nissan Leaf e+, MG ZS EV Long Range and Mercedes EQS AMG 53 4MATIC+. These vehicles, with different charging powers, are connected to the network via load or generator buses based on household demands. The aim was to determine the optimal power flow for charging and analyze the impact of EV integration during peak and off-peak hours. Simulation results demonstrated that the EV schedule management method significantly reduces average EV load demand without overloading the distribution network’s power flow, while maintaining an improved voltage profile. Furthermore, by integrating drone technology, EVs can transmit stored information back to the grid, enhancing the overall energy management beyond power consumption.
Similar content being viewed by others

Introduction
Amid the ongoing energy crisis and increasing environmental concerns caused by classical fossil fuel energy sources, optimizing renewable energy utilization has become a critical area of research and innovation, engaging engineers, policymakers, and industry practitioners. Distributed generation (DG), particularly from renewable sources, plays a pivotal role in enhancing efficiency and promoting environmentally sustainable electricity production. However, integrating renewable distributed generation into power systems introduces operational complexities due to the inherent variability and intermittency of these sources. To address these challenges, demand response (DR) has emerged as a key mechanism to enhance grid reliability, offering greater flexibility and maintaining a balanced supply-demand relationship.
The significance of DR in power system operations has been extensively studied from multiple perspectives. As examples, one study evaluated DR programs as a viable alternative to conventional generation methods, particularly in wind-integrated systems, analyzing the effectiveness of tariff-based and incentive-based strategies in optimizing grid stability and economic efficiency1. Another research highlighted DR’s crucial role in improving power system reliability during extreme weather events, emphasizing the importance of well-structured market mechanisms to maximize its potential2. Additionally, an innovative agent-based framework was proposed to enhance demand-side flexibility, where a central demand response provider (DRP) efficiently coordinates industrial and residential aggregators, enabling optimal load management and improved energy efficiency3.
Electric vehicles (EVs) significantly contribute to carbon dioxide (CO₂) reduction and grid management through demand response (DR) programs. Their integration into Vehicle-to-Grid (V2G) systems enables efficient energy transfer, but their limited battery capacity necessitates aggregator involvement for effective participation4. In addition, aggregators facilitate energy flow management and market participation, optimizing prices and increasing revenue for EV owners. However, technological barriers, such as the need for advanced bidirectional charging systems, and regulatory challenges require policy updates to support V2G interactions5. Future advancements in battery technology and increased public awareness are crucial for widespread adoption. Addressing infrastructure and regulatory issues will be key to maximizing EV benefits in DR programs.
Aggregators play a vital role in enabling electric vehicle (EV) users to participate in the energy market, but they are facing challenges due to the unpredictable charging behavior of EV owners, which affects grid stability and market efficiency6. Technical issues, such as uncontrolled charging leading to power quality concerns, necessitate smart solutions like Vehicle-to-Grid (V2G) technology. In energy markets, aggregators must balance efficiency and fairness in resource allocation7. Despite these challenges, coordinated strategies can enhance grid stability, optimize costs, and improve renewable energy integration. Engaging prosumers may further strengthen flexibility and resilience in the energy system, highlighting the potential of aggregators to drive market efficiency and system reliability8.
Operating as private entities, aggregators consistently aim to maximize their profits through various strategies. These may include offering additional services9 and participating in secondary reserve markets within the electrical system. The complex interplay between aggregator objectives, EV user needs, and grid requirements underscores the importance of optimized management strategies in this evolving landscape. Collaborative efforts among multiple aggregators have the potential to enhance DR flexibility and improve service quality for customers, even with relatively simple infrastructure configurations at each station. For instance, a centralized hierarchical framework where the Distribution System Operator (DSO) coordinates charging across all aggregators to minimize energy purchase costs under Time-of-Use (TOU) tariffs and achieve peak load control is proposed. This approach may facilitate cooperation between multiple aggregators and distribution operators. However, this approach may also raise concerns regarding data privacy and personal financial security.
Coordinating EV aggregators without a central controller relies on distributed optimization algorithms and incentive-based mechanisms to enhance system efficiency. Neurodynamic-based algorithms can optimize real-time bidding strategies7, while alternating direction method of multipliers (ADMM) enables collaborative optimization between network operators and aggregators10. Incentive models like Nash Bargaining Theory promote fair trading7, and Peer-to-Peer Trading reduces costs and risks11. Overcoming challenges in fairness and distributed energy management is key to sustainable EV grid integration.
This paper comprehensively examines and quantifies the benefits for the above cited three stakeholders. For this purpose, we propose an enhanced model of EV user satisfaction that accounts for the nonlinear relationship between changes in the EV State of Charge (SoC) and user satisfaction with aggregator services. Based on this analysis, we suggest an optimal scheduling algorithm for aggregator operations. This algorithm enables aggregators to maximize their profits while meeting the minimum DR capability standards set by the distribution network and satisfying EV user requirements.
This study focuses on residential aggregators, emphasizing service quality, DR performance, and the time-space statistics of EV behaviors. This focus is motivated by the limited range of EV batteries and the correlation of charging and discharging behaviors across different stations. The interrelation between EV user service requests, the profit of multiple aggregators, and their economic incentives for DR program participation is explored, considering the stringent charging requirements of EV consumers.
This research introduces a multi-objective optimization framework that integrates grid constraints, time-of-use (TOU) pricing structures, and consumer satisfaction while optimizing EV charging and discharging schedules. Unlike conventional methods, this framework dynamically manages the unpredictability of EV charging behaviors while ensuring flexibility in real-time energy demand response. A key advantage of this approach is its ability to assess the impact of TOU pricing under varying demand scenarios, effectively balancing peak and off-peak load variations. Moreover, State of Charge (SoC) constraints are incorporated to adaptively accommodate fluctuating EV charging requirements. Distinct from conventional algorithms such as Genetic Algorithms (GA) and Particle Swarm Optimization (PSO), this study employs a Red Deer Algorithm (RDA)-based optimization framework to jointly optimize EV charging/discharging schedules, grid balancing, and energy demand forecasting. By integrating V2G capabilities, the proposed approach enables EVs to supply energy back into the grid, enhancing overall grid stability and energy flow management. Additionally, the innovative incorporation of drones for real-time data exchange between EVs and the grid may further improve communication efficiency, allowing for better energy allocation and charging station utilization.
The proposed optimization framework effectively addresses scalability challenges in large-scale test cases involving thousands of variables. Utilizing the Red Deer Algorithm (RDA), a metaheuristic approach balancing exploration and exploitation within the optimization problem search-space, the method ensures efficient scheduling of EV charging and discharging while maintaining grid stability. The IEEE 69-bus test system, with a diverse fleet of EVs, was used to validate the framework, demonstrating its capability to optimize power flow without overloading the grid. The multi-objective optimization approach, incorporating a linear weighted sum technique, efficiently handles constraints such as State of Charge (SoC), load demand variations, and peak/off-peak energy pricing. Compared to traditional algorithms, RDA reduces computational complexity through hierarchical population structuring and intelligent local search mechanisms. Empirical validation with over 1000 households confirmed the approach’s effectiveness in minimizing peak load impact while dynamically adapting to grid constraints. Additionally, real-time drone-assisted data exchange may contribute in enhancing decision-making accuracy in distributed environments, making the method robust for large-scale applications.
The remainder of this paper is structured as follows: Sect. "Literature review" presents a comprehensive literature review, divided into six subsections covering key aspects such as the role of aggregators in EV energy management, optimization techniques for EV aggregation, stakeholder considerations, advanced control and machine learning techniques, microgrid stability enhancement through V2G integration, and identified research gaps. Section "Problem formulation" formulates the problem and defines the objectives and constraints of the proposed framework. Section "Red deer algorithm (RDA)" details the methodology, focusing on the Red Deer Algorithm (RDA) and its role in optimizing EV charging and discharging schedules. Section "Dynamic electricity pricing" explores dynamic electricity pricing and its impact on EV energy management. Section "Simulation results and discussion" discusses the simulation results and provides an in-depth analysis of the proposed approach in terms of grid stability, power loss reduction, and voltage profile enhancement. Finally, Sect. "Conclusion" concludes the study and outlines future research directions.
Literature review
Decentralized control systems and technological advancements are paving the way for more extensive integration of distributed renewable energy resources (DERs) into the power grid. The adoption of DERs, including solar, wind energy, and electric vehicles (EVs), offers numerous benefits, such as reducing greenhouse gas emissions, improving energy flexibility, and enhancing system resilience and reliability12. Among DERs, EVs are rapidly gaining importance due to their potential for bidirectional energy exchange with the grid. Aggregators play a crucial role in managing EV operations, including charging, discharging, and optimizing their interactions with the grid13. In what follows, the components of the DERs within the framework of EVs charging-discharging and the bidirectional transfer of energy between several parties will be explicited. The main focus will be on the role of the aggregators in managing the transfer of energy as well the impact of swarm and artificial intelligence optimization techniques in providing the optimal schedules of the whole system operation. In addition, the integration of V2G energy transfer mode aiming to ensure more stability of the microgrid will be surveyed based on sevral previous studies on the topic. Note here that this section aims to critically investigate recent literature review in order to well-situate the contributions of our paper as compared to previous studies. This litertaure review will end by providing a comprehensive summary of the findings of selected studies while emphasising on the novelties of our study.
Role of aggregators in EV energy management
Aggregators act as intermediaries between EV users and the energy market, facilitating optimal energy dispatch strategies. According to research published in the European Platform of Legal Frameworks14, EV aggregation networks enable market participation by connecting individual EV owners with central energy providers. This role is essential in mitigating the unpredictable nature of EV charging patterns, improving grid stability, and ensuring efficient energy utilization15. However, existing literature lacks a unified strategy for optimizing EV aggregator participation in energy markets under uncertainty, highlighting the need for improved decision-making frameworks.
Optimization techniques for EV aggregation
Several optimization strategies have been proposed to enhance EV aggregation decision-making under uncertainty. These methodologies can be broadly classified into stochastic and deterministic approaches.
-
Stochastic Optimization: Stochastic methods consider uncertainties in EV availability and charging behavior by modeling multiple probable outcomes. Scenario-based techniques estimate power requirements by evaluating various scenarios16. However, these methods require a high computational burden due to the extensive number of trials necessary to assess large-scale EV fleets17.
-
Deterministic Approaches: Deterministic models predict energy consumption and available charging times for individual EVs, assuming known driving patterns. While these models offer precise decision-making, they often fail to account for real-world uncertainties18. Some studies introduce risk-averse techniques, such as chance constraints19 or conditional value-at-risk methods20, to enhance robustness. However, these approaches often lack adaptability to worst-case scenarios, such as extreme fluctuations in EV participation21.
To mitigate computational challenges, researchers have developed scenario-reduction techniques that balance complexity and solution optimality. These methods streamline calculations by prioritizing key scenarios without significantly compromising accuracy22.
Consideration of stakeholders in EV optimization
To further improve energy management, recent studies integrate the perspectives of multiple stakeholders, including EV owners, aggregators, and distribution system operators (DSOs). For instance, the research in23 proposes a multi-objective framework that balances cost minimization for EV owners while reducing power losses and enhancing system efficiency for DSOs. By applying this methodology to an IEEE 69-bus test feeder with real-world load data, the study demonstrates its effectiveness in optimizing charging schedules and minimizing operational expenses.
Advanced control and machine learning techniques in energy management
Beyond traditional optimization techniques, recent advancements integrate artificial intelligence (AI) and machine learning (ML) to enhance decision-making in energy management systems:
-
Fuzzy cloud stochastic models optimize energy distribution and storage efficiency by considering multi-objective constraints, such as emissions and cost reduction24.
-
Intelligent Energy Management Systems (EMS) segment daily energy demand into smaller intervals, reducing voltage fluctuations and network losses25.
-
Fuzzy logic-based EV selection models prioritize cost-efficiency while minimizing battery degradation, ensuring long-term sustainability26.
-
Machine learning algorithms, including Gaussian Process modeling and Krill Herd Algorithm, provide accurate predictions of HEV charging demand, reducing prediction errors and operational costs27.
-
Hybrid control strategies such as Fuzzy PID controllers, Grey Wolf Optimization, and Random Forest techniques dynamically adjust EV charging schedules, optimizing efficiency in uncertain environments28,29,30.
Enhancing microgrid stability through V2G integration
The integration of vehicle-to-grid (V2G) technology strengthens microgrid stability by enabling EVs to function as distributed energy reserves. V2G strategies improve grid efficiency by reducing congestion and balancing supply-demand dynamics in real time31. Stochastic optimization approaches, including Coati Optimization and Iterative Map-Based Self-Adaptive Crystal Structure Algorithm, have demonstrated effectiveness in managing unpredictable EV charging behaviors32. Additionally, ML-based predictive models further refine energy distribution strategies, ensuring optimized grid performance33.
Identified research gaps and contribution of the proposed study
Despite significant advancements in EV aggregation and energy management strategies, several gaps remain:
-
Computational Scalability and Robustness: Existing stochastic and deterministic optimization techniques struggle with handling large-scale networks and managing the uncertainties of EV behaviors efficiently.
-
Lack of Integrated AI-Based Methods: Limited integration of AI-based techniques with conventional energy management frameworks for real-time decision-making.
-
Stakeholder-Specific Multi-Objective Frameworks: Current studies lack a comprehensive framework that simultaneously considers aggregator profitability, EV user satisfaction, and grid stability.
-
V2G and Drone-Assisted Data Exchange: The absence of an integrated approach combining V2G capabilities with aggregator-based optimization for enhanced grid stability, particularly using drone-assisted real-time data exchange.
The State-of-the-Art Comparison Table 1 provides a structured overview of various optimization methodologies used for EV energy management, comparing their key findings and limitations. It highlights advancements in AI-based, stochastic, and hybrid optimization techniques for grid stability, cost efficiency, and energy management. The reviewed studies demonstrate the effectiveness of various optimization techniques but also reveal critical gaps, particularly in addressing scalability, real-time adaptability, and the integration of emerging technologies. Building on these insights, the next section formulates the optimization problem, outlining the objectives and constraints that guide the proposed framework.
Problem formulation
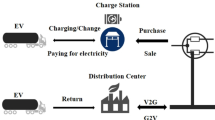
EVs, equipped with vehicle-to-grid (V2G) technology, have the potential to consume and send energy back to the grid. This bidirectional capability, coupled with aggregator models and unmanned aerial systems (UASs) commonly known as drones serving as enablers for the EV charging efficient operation, can revolutionize energy management, grid stability, and remote monitoring. Furthermore, drone-based sensors and communication tools facilitate real-time data collection and monitoring, especially in remote areas where traditional infrastructure is limited. In fact, drones may play a key role in centralizing the data collected from various stakeholders including the EVs, charging stations, grid operators among others. In addition, they may provide the EVs drivers (or the autonomous EVs) with information about the crowd particularly when they are moving toward the optimal available charging stations. Under these conditions, the gain in term of driving time, battery autonomy, grid stability and charging stations management is ensured.
In the context of smart grids, Vehicle-to-Grid (V2G) technology plays a crucial role in enhancing grid flexibility, stability, and efficiency. V2G enables bidirectional energy exchange between electric vehicles (EVs) and the power grid, allowing EVs not only to consume electricity but also to supply energy back to the grid when needed. This interaction facilitates several benefits, including load balancing, active and reactive power compensation, and demand-side management. One of the key advantages of V2G is its ability to store excess renewable energy, particularly from intermittent sources like solar and wind, within EV batteries. This stored energy can then be dispatched back to the grid during peak demand periods, improving grid reliability and energy utilization. V2G systems can be categorized into unidirectional (V1G) and bidirectional configurations. Unidirectional V2G supports controlled charging to optimize grid stability, while bidirectional V2G, as employed in our proposed method, allows EVs to function as distributed energy storage units that actively contribute to grid support.
In our approach, EVs dynamically exchange energy with the grid, assisting in peak load management and renewable energy integration. By enabling EVs to discharge surplus energy during high-demand periods and recharge during low-demand hours, the proposed V2G framework enhances grid resilience, reduces operational costs, and minimizes reliance on conventional power plants. Furthermore, V2G empowers EV owners to participate in demand response programs, providing financial incentives while optimizing grid performance. This strategic energy exchange fosters a more sustainable and intelligent energy ecosystem, supporting the transition toward greener and more efficient power networks.
The generalization of the V2G architecture is illustrated in Fig. 1. EV charging stations (EVCSs) are engaged in supervising each EV charging point and organize them so that, when aggregated, they possess sufficient generating capacity to significantly impact the power network. The primary role of the EVCS monitoring system is to report on the EVs parked in the respective area by collecting data such as EV’s time of arrival, departure time, the initial SoC, the final SoC etc. to the aggregator in predefined timeframes. This centralized management approach using EVCS enables effective monitoring of a large-scale EV fleet, contributing to load management and grid stability23.
An EV aggregated by an agent like an aggregator becomes a potential resource to engage in the DR programs, thus the need for an optimization algorithm to handle EV scheduling for better operational stability, improved provision of service and customer satisfaction.
By aggregating EVs, an aggregator can effectively participate in DR programs, enhancing grid stability and service quality. Optimizing EV charging and discharging schedules through appropriate algorithms is crucial to maximize the benefits for both EV owners and the power grid.

EVCS aggregation scheme with drone-enabled V2G system.
The residential distribution systems consider the role of an aggregator who plans the optimal EV charging schedule to maximize the cost-benefit ratio. An agreement of fixed monthly fee might be established between the aggregator and the EV owners34. EV owners benefit from lower charging costs made easy by the aggregators. The effectiveness of the distribution mechanism does not affect the aggregator. To optimize charging, the aggregator requires information about the vehicle’s starting SoC, arrival time, and departure time. The results of unplanned operation are compared with those of scheduled charging and discharge35.
Optimal scheduling of EV charging/discharging
The objective of optimal EV scheduling is to balance the interests of the aggregator and the DSO36. To simplify the investigation, we assume that EVs maintain a constant charging/discharging power equal to their rated capacity throughout each time slot. At the beginning of each time slot, an optimization algorithm is employed to determine the optimal schedule. In this work, the scheduling strategy is evaluated using three EV models with different rated values for a 10-minute time slot37. The optimal scheduling scheme for a time slot ‘t’ is formulated (Eq. 1) from the EV aggregator perspective.
where,
\(\:{P}_{\text{m}\text{a}\text{x}}\) maximum charging/discharging power in kW
\(\:{\rho\:}_{t}\) charge/discharge rate,
\(\:C\left(t\right)\) is the electricity price at time instant ‘t’,
\(\:\left\{\text{0,1},-1\right\}\) denotes the idle state, discharging and charging of the EV, respectively.
Energy available in the battery E(tn) is given by:
\(\:E\left({t}_{0}\right)\:\)is the initial energy of the battery, while the SoC at the \(\:{t}_{0}\) instant is computed as,
\(\:SoC\left({t}_{0}\right)\): The State of Charge at time \(\:{t}_{0}\), representing the remaining energy in the battery as a fraction of its maximum capacity.
\(\:So{C}_{\text{m}\text{a}\text{x}}\): The maximum possible \(\:SoC\) (100% or 1.0 in normalized form).
\(\:{W}_{\text{k}}\): The energy consumed by vehicles for traveling k kilometers.
d: The distance traveled (in kilometers) during the given trip.
k: A normalization factor for distance, representing trip characteristics.
\(\:{E}_{\text{m}\text{a}\text{x}}\): The maximum energy storage capacity of the EV’s battery.
For simulation purposes, let’s assume the initial energy of the SoC to be 25% of the total rated battery capacity.
The SoC at the nth instant is given by,
The duration between \(\:{t}_{0}\) and T is utilized for the scheduling process.
From a DSO perspective, the responsibility lies in making sure all network limits are met. To run the network effectively, the goal is to reduce power loss. Thus, the line loss \(\:{P}_{Loss,t}\) of the distribution system at time instant ‘t’ can be expressed as,
subject to,
Where,
\(\:{P}_{G,t}\) real power generation at the slack bus at time instant ‘t’
\(\:{P}_{{D}_{i,t}}\) real power load at the ith bus at time instant ‘t’.
While, \(\:{P}_{{D}_{{k}_{\text{new\:}}},t}\) is the current real power load at kth bus, including the real power demand PDk,t and the charging/discharging EV power at time ‘t’ as represented by Eq. (9)
Where, \(\:{V}_{n}\) denotes the voltage magnitude at the nth bus. \(\:{V}_{\text{m}\text{i}\text{n}}\) and \(\:{V}_{\text{m}\text{a}\text{x}}\) are the minimum and maximum voltage limits, respectively.
The aggregator and DSO coordinate their efforts to implement optimal scheduling, ensuring efficient grid operation. This strategy satisfies all the demands and limitations put forth by the aggregator and DSO while minimizing the charging costs faced by EV owners and the power loss in the network38.
Considering the previous analysis, the final objective function is expressed as a weighted sum of Eq. (1) and Eq. (7) as follows,
Where \(\:{w}_{1}\) and \(\:{w}_{2}\) are weight factors.
The linear weighted sum technique was selected for EV scheduling optimization due to its simplicity, flexibility, and practical applicability. It effectively combines multiple conflicting objectives, such as minimizing power losses, improving voltage profiles, and ensuring EV user satisfaction, into a single function by assigning adjustable weights. This method is computationally efficient, avoiding the complexity of maintaining Pareto-optimal solutions, and is well-suited for large-scale problems. Its adaptability allows dynamic weight adjustments to accommodate varying operational conditions, ensuring robustness across diverse scenarios. Comparative analysis confirms its balance of simplicity and performance, making it ideal for the proposed EV scheduling framework.
Measure of user satisfaction with EV’s SoC
SoC satisfaction measures the extent to which an aggregator can fulfill the charging/discharging needs of an EV user. When EV users participate in the service, facility constraints or operational limitations may lead to discrepancies between predicted and actual charging/discharging SoC, potentially affecting customer satisfaction. To quantify this, we introduce an index, denoted as \(\:{G}_{1,i}\text{\%}\), representing the satisfaction of the ith EV with its SoC upon leaving the aggregator34.
where \(\:SO{C}_{0,i}\) – arrival time SoC
\(\:SO{C}_{i}^{{\prime\:}}\)- targeted SoC value
\(\:SO{C}_{i}^{{\prime\:}{\prime\:}}\)- SoC value at the ith EV departure time.
With the problem clearly defined and the key constraints identified, an efficient optimization approach is required to achieve multi-objective scheduling while ensuring grid stability. The following section introduces the Red Deer Algorithm (RDA), detailing its mechanism and its suitability for solving the formulated optimization problem.
Red deer algorithm (RDA)
The Red Deer Algorithm (RDA)39 is a nature-inspired optimization technique that draws its inspiration from the unique mating behavior of Scottish red deer during the breeding season. These behaviors include roaring, fighting, and harem formation, which are crucial in establishing dominance and ensuring reproductive success. By mimicking these biological processes, the RDA effectively balances exploration and exploitation within the solution space, making it well-suited for solving complex optimization problems. Due to its efficiency, the RDA has been used in EV charging related applications including data clustering40, sensor node clustering in wireless sensor networks41 and path planning of inspection robots42.
Conceptually, the operation of the RDA is illustrated in the following phases43:
Roaring phase
In nature, male red deer roar to assert their presence and attract mates. The algorithm models this behavior as a local search process, where solutions explore their neighborhood to improve their fitness. This phase enhances diversification by encouraging the algorithm to search new regions of the solution space.
Fighting phase
Male red deer compete through physical contests to establish dominance. In RDA, this is translated into a selection mechanism where candidate solutions are evaluated and the strongest (best fitness) are promoted as “commanders,” while weaker solutions become “stags.” This ensures intensification by focusing on the most promising areas of the solution space.
Harem formation and mating
Dominant male deer form harems by attracting females, which they defend and mate with. In RDA, commanders generate new solutions (offspring) by combining their traits with selected females (other solutions). This phase incorporates both local and global exploration, introducing diversity while refining existing solutions.
Mathematical framework
Key steps in the RDA are mathematically formulated as follows43:
-
Initialization:
The initial population (Npop) is divided into males (Nmale) and females (hinds, Nhind).
A solution is represented as an array:
Where (Nvar) is the number of decision variables.
-
Roaring Phase:
Male red deer explore the solution space by updating their positions:
Where Ub and Lb are the upper and lower bounds, and a1, a2, a3 are random values in [0,1].
-
Fighting Phase:
Commanders (NCom) and stags (Nstag) compete. Two new solutions are generated:
Where b1, b2 are random parameters, and the better solution is retained.
-
Harem Formation
The power (Pn) of a commander determines the proportion of hinds in the harem:
where Vn is the normalized fitness of the n-th commander.
-
Mating Phase:
Offspring are generated by mating within and across harems. The offspring solution is:
where c is a random parameter.
Exploration and exploitation balance
The Red Deer Algorithm (RDA) balances exploration, which diversifies the search for potential solutions, and exploitation, which refines the best solutions to achieve optimal results. Exploration is driven by the roaring phase, which introduces variability and prevents premature convergence, while exploitation is reinforced by the fighting and mating phases, emphasizing intensification through competition and hierarchical mating. By dynamically adjusting parameters (a, b, c), the RDA adapts to maintain this balance, ensuring effective navigation of the search space and convergence to high-quality solutions in complex optimization problems.
Implementation of RDA
The flowchart in Fig. 2 outlines a structured process for optimizing EV charging schedules using RDA. The algorithm begins with inputting grid and EV parameters, setting up an initial EV aggregator configuration, and defining constraints and RDA parameters. The algorithm iteratively updates the aggregator’s location and capacity, computes objective functions (e.g., cost minimization and grid stability), and calculates fitness values. Through power dispatch and optimal schedule determination, the process checks for convergence and outputs the final solutions, ensuring an efficient and balanced EV charging strategy while minimizing costs and impact on the grid.

Flowchart of RDA.
RDA’s breeding process, including the mating of stags with the nearest hind, further enhances exploration. The subsequent generation of RDs through the mating process represents the creation of new solutions, reflecting the evolutionary nature of the algorithm. To maintain diversity and prevent premature convergence, weak solutions are also given a chance to contribute to the next generation.
While the Red Deer Algorithm (RDA) provides an effective optimization framework for EV scheduling, the economic aspect of charging costs plays a crucial role in influencing EV user behavior and grid stability. To further enhance the effectiveness of EV integration, the following section explores dynamic electricity pricing strategies, particularly Time-of-Use (ToU) pricing, and their impact on optimizing EV charging demand.
Dynamic electricity pricing
Electricity pricing has evolved from traditional flat-rate structures to dynamic pricing models, allowing for more efficient energy distribution and demand-side management. Dynamic electricity pricing adjusts tariffs based on real-time supply and demand conditions, aiming to enhance grid stability and incentivize consumers to shift their energy usage to off-peak hours. Among the various dynamic pricing strategies, Time-of-Use (ToU) pricing remains one of the most widely implemented approaches.
ToU pricing system establishes electricity rates based on specific time blocks, determined in advance by utilities using historical data rather than real-time demand44. This pricing model provides different electricity tariffs based on three periods: off-peak, mid-peak, and full-peak. During the off-peak period, electricity supply exceeds demand, leading to lower ToU costs. At mid-peak, supply and demand are nearly balanced, resulting in moderate pricing. However, during full-peak hours, electricity consumption surges, necessitating the operation of expensive and less efficient peaking power plants, such as those using diesel, coal, and petroleum. To handle high peak demand, utilities must also invest in infrastructure expansion and additional power generation facilities.
As electricity generation increases, technical losses within the system also rise, leading to higher peak rates. To mitigate the impact of EV charging on the grid, utilities often rely on infrastructural variations and indirect pricing mechanisms. However, since ToU pricing features high rates only during peak hours and low rates in off-peak periods, it alone is insufficient to effectively manage the influence of EV charging on the power grid.
In smart grids, Time-of-Use (ToU) pricing is structured so that electricity rates fluctuate based on the grid’s load at different times of the day. The 24-hour period is divided into multiple time intervals {τ1, τ2, ., τq}, each associated with a corresponding grid load {Lτ1, Lτ2, ., Lτq} and a set of discrete pricing levels {Pτ1, Pτ2, ., Pτq}. These prices are selected from a predefined set of discrete values P = {P1, ., Pn}45.
The pricing mechanism operates on a global scale, ensuring that electricity rates are directly proportional to the grid’s total demand. When demand reaches its highest peak during a specific time slot τθ, the unit price is set to the maximum value Pτθ = max(Pτ1, Pτ2, …, Pτq). Conversely, when the grid load is at its lowest, the pricing is adjusted to the minimum level Pτθ = min(Pτ1, Pτ2, …, Pτq). This dynamic pricing approach optimizes energy consumption patterns, encouraging users to shift their usage to periods of lower demand, thereby improving grid efficiency and stability.
A grid-specific Time-of-Use (ToU) pricing framework is employed to facilitate the practical application of the proposed pricing strategy, which is systematically outlined in the step-by-step algorithm provided below.

Adaptive Pricing Mechanism for EV Charging45.
The variable κ represents the capacity of the distribution network, while x=(x0,x1,x2,…,x23) denotes the conventional load of the network over a 24-hour period, measured at hourly intervals. The adjusted load values, denoted as x′, are computed using Eq. (18):
where ζ serves as a normalization factor. This transformation standardizes the load values to a new range, facilitating further analysis.
The function f scales the load vector x within the range [1,−1], using ζ as the upper threshold and 0 as the lower threshold. The parameter ζ is selected to ensure that max(x) ≤ ζ < κ, where κκ represents the distribution network’s capacity.
Electric vehicles (EVs) act as flexible loads that can be integrated into the system during periods of low demand, helping to balance the grid by filling demand valleys and maintaining stable operation. To achieve peak shaving and valley filling, the parameters 1 and δ2 are determined using Eqs. (19) and (20), where max(x′) and min (x′) correspond to the highest and lowest values within the normalized load vector x′.
Next, a convex optimization problem is formulated to minimize \(g(y^{\prime}+x^{\prime}+{\delta _1}+{\delta _2})\) where the decision variable y′ is constrained within the range [− 1,1], ensuring that the additional load from EV charging is properly adjusted.
The values of δ1and δ2 are added element-wise to x′, resulting in y′, which represents the normalized desired EV charging load. The actual charging load y is obtained by denormalizing y′ using Eq. (21):
Once the desired valley-filling load y is determined, the charging price is assigned based on a ranking system. The maximum and minimum values of y are set as the upper and lower bounds, respectively. The load values are then distributed across the available discrete pricing levels {Pτ1, Pτ2, …, Pτq}. The highest price is assigned to the lowest load, the second-highest price is assigned to the second-lowest load, and this process continues until the highest load is allocated to the lowest price, ensuring an efficient demand-response pricing structure.
The integration of dynamic electricity pricing, particularly Time-of-Use (ToU) pricing, plays a crucial role in shaping EV charging behaviors and reducing peak demand. However, the real-world impact of these pricing strategies, combined with the proposed optimization framework, must be evaluated through rigorous simulations. The next section presents simulation results, analyzing the effectiveness of the Red Deer Algorithm (RDA) in optimizing EV scheduling and assessing its impact on power distribution networks.
Simulation results and discussion
A demographic-based analysis was conducted to evaluate spatiotemporal patterns in vehicle utilization and charging behavior. The methodology incorporated three vehicle models, each characterized by distinct specifications in terms of battery capacity, operational range, and charging parameters (Tables 1 and 2). Temporal stratification of charging events revealed three primary intervals: morning peak (06:00–10:00), evening peak (15:00–21:00), and off-peak periods. This temporal categorization was derived from empirical observations of charging behavior and network load distributions9.
The simulation framework incorporated a State of Charge (SoC) threshold parameter of 25%, established to reflect observed user charging behavior patterns. Power demand characterization was conducted using a high-resolution dataset derived from a 69-bus residential distribution network, incorporating both active (P) and reactive (Q) power measurements. The dataset architecture included hierarchical power demand parameters: aggregate network loading, maximum bus capacity utilization, individual nodal demand profiles, and EV charging power consumption patterns. Temporal granularity was maintained at 10-minute intervals throughout the 24-hour analysis period, facilitating comprehensive evaluation of load dynamics and charging patterns.
Additionally, four distributed generators (DGs) were incorporated into the test network alongside the EVs. The load power demand data was combined with the vehicle specifications from Tables 2 and 3 to address the scheduling optimization problem. This approach aims to manage the charging and discharging of EVs connected to the network without overloading the distribution system. Furthermore, the approach capitalizes for power losses’ reduction and voltage profile improvement.
Average EV demand
Temporal analysis of energy demand characteristics is presented in Fig. 3, depicting diurnal consumption patterns for six EV configurations (three international and three domestic models) during weekday operational cycles. The profiles delineate charging initialization parameters and temporal duration metrics, correlated with initial and terminal State of Charge (SOC) values. Model validation was conducted through comparative assessment of simulated demand profiles against empirical charging data obtained from operational EVs. Statistical analysis revealed significant correlation coefficients between simulated and measured charging behaviors, substantiating the accuracy and reliability of the computational framework.

Profiles and average energy demand for EVs’ from (a) International market (b) Indian market.
More in-depth analysis of Fig. 3a and b reveals that the peak demand for both international (1.53 kW) and Indian (1.49 kW) model profiles occurs during the evening hours (4 PM to 10 PM). Notably, the simulated average peak demand aligns closely with the monitored EV charging behavior, suggesting the effectiveness of the EV scheduling optimization. Additionally, individual EV energy demand remains well-managed, with a maximum of 15 kW.
The results in Fig. 4 were obtained by simulating three scenarios: (1) households without EVs, (2) households with EVs, and (3) a combination of households and EVs. The simulation considered a 24-hour cycle for a 69-bus network with typical residential load patterns. Key assumptions include:
-
Initial SoC: Randomized between 20% and 80% for the simulated EV fleet.
-
Charging Power: Based on rated values of the EV models in Tables 1 and 2.
-
Time Slots: Ten-minute intervals were used to capture dynamic changes.
-
Constraints: Network voltage limits are 0.95–1.05 p.u., the transformer capacity falls below 100% utilization, and user satisfaction thresholds is set to SoC greater than 80% upon departure.
-
Scenarios: Unmanaged charging (baseline) and optimal scheduling using the proposed algorithm.
These conditions and constraints were implemented in MATLAB/Simulink to generate aggregated demand profiles with emphasis on the impact of controlled and uncontrolled EV charging. The average EV demand peaks during peak hours (7 AM to 10 AM, 4 PM to 10 PM), ranging from 1.18 kW to 1.74 kW. Notably, this peak demand for EVs is significantly higher than the household power demands, which typically remain below 0.4 kW during peak hours. The results demonstrate that EV integration significantly impacts network power demand characteristics, necessitating the implementation of charging regulation protocols to mitigate peak load conditions across the distribution infrastructure. Analysis reveals equivalent demand patterns across both vehicle model categories, resulting in identical graphical representations. This uniformity in load profiles underscores the consistent impact of EV charging on network demands, independent of vehicle model specifications.

Average energy demand for 1000 households, EVs and households plus EVs for EVs from (a) international market (b) Indian market.
EVs scheduling and control
Network performance characteristics and charging point operational parameters are illustrated in Figs. 5, 6, 7 and 8, demonstrating temporal variations across a 24-hour cycle within a 69-bus feeder infrastructure. Comparative analysis was conducted between controlled and uncontrolled operational scenarios at 100% EV penetration. Uncontrolled charging scenarios exhibited critical transformer overloading of 136% with substantial voltage profile degradation beyond acceptable operational parameters. The implemented scheduling management protocol demonstrated successful regulation of transformer loading within nominal capacity while maintaining voltage profiles within prescribed operational limits. Empirical results suggest the proposed control methodology enables optimization of network hosting capacity approaching 100% EV penetration thresholds.

EV Transformer loading with and without control for (a) International (b) Indian EVs’ Model.
Quantitative analysis of Fig. 5a, focused on international EV models, reveals that implementation of the control algorithm effectively constrained transformer loading to maximum values of approximately 80 kW during peak demand intervals. Similarly, Fig. 5b analysis, centered on domestic (Indian) EV models, demonstrates that the control protocol successfully maintained peak transformer loading at approximately 100 kW, representing a significant reduction from the uncontrolled scenario’s maximum loading of 350 kW. These results quantify the efficacy of the implemented control strategy in mitigating peak transformer loading conditions across both vehicle categories.

Comparison of Voltage Profile with and without control cycle for EVs from (a) International and (b) Indian markets.
Analysis of Fig. 6a reveals that implementation of the control mechanism for international EV models results in a sustained voltage profile exceeding 0.90 per unit (p.u.) across the test network. In the absence of control measures, significant voltage degradation is observed during peak demand periods (17:00–22:00), with values declining below 0.7 p.u. The comparative analysis between controlled and uncontrolled scenarios demonstrates the control system’s efficacy in maintaining network voltage stability. Similarly, Fig. 6b illustrates the control cycle’s effectiveness for Indian EV models, where voltage levels are consistently maintained above 0.9 p.u. throughout the 24-hour operational period. The quantitative comparison between both scenarios provides empirical evidence of the control system’s capability in preserving voltage stability across different EV model configurations.

Comparison of aggregated EV power demand with and without control cycles for (a) international and (b) Indian EVs’ models.
Temporal analysis of aggregate EV demand characteristics in Fig. 7a demonstrates the optimization efficacy of implemented charging point management protocols for International Model EVs. The control algorithm implementation (blue curve) achieved a 46.7% reduction in peak demand, from 15 kVA to 8 kVA, relative to the uncontrolled scenario (dotted red curve). The control methodology demonstrates successful attenuation of demand variability during critical loading periods.
Figure 7b illustrates comparative demand profiles for Indian Model EVs under controlled and uncontrolled operational scenarios. The implementation of the optimization protocol resulted in a 33.3% reduction in peak demand, from 9 kVA to 6 kVA, with significant enhancement of load profile stability. The demonstrated load modulation capabilities suggest robust potential for grid stability maintenance under increased EV penetration conditions, particularly during periods of heightened demand volatility.

Individual EV Charging Behavior with and Without Control (a) International Model (b) Indian Model,
Figure 8 demonstrates the temporal dynamics of EV charging station connectivity patterns in response to aggregate demand fluctuations. The control protocol implements strategic disconnection during peak demand intervals, with subsequent reconnection and charging resumption during reduced network loading conditions, maintaining this cycle until target State of Charge (SoC) parameters are achieved. Analysis of Fig. 8a reveals that uncontrolled charging of international model EVs exhibits extended charging durations during peak periods, initiating at approximately 16:00 and concluding at 00:30. Implementation of the control strategy demonstrates charging duration reduction exceeding 120 min. Figure 8b exhibits analogous behavioral patterns for domestic (Indian) model EVs.
Customer impact level (CIL)
The quantitative assessment of direct scheduling impacts on EV charging station operations employed the Customer Impact Level (CIL) metric, as established in reference36. The metric utilizes a decile classification system (groups 0–9) to quantify the proportional increase in charging duration required to achieve target State of Charge (SoC) under implemented management protocols, relative to uncontrolled charging scenarios.

Probability of CIL for EV Charging Control Actions (a) International Model (b) Indian Model.
Figure 9 presents the distributional analysis of Customer Impact Level (CIL) across varying EV penetration scenarios, where each CIL classification represents a 25% incremental deviation in charging duration from scheduled parameters. At 40% penetration levels, charging disruption analysis reveals minimal impact, with 70% of the EV population experiencing negligible temporal deviation (CIL 0). As penetration levels escalate to 60% and beyond, temporal disruptions demonstrate increased prevalence, affecting approximately 60% of the EV fleet. However, the magnitude of impact remains within manageable parameters, with a minimal proportion of EVs experiencing charging duration extensions exceeding 100% of nominal values, even under peak loading conditions. These results validate the efficacy of the implemented EV scheduling protocol in maintaining network operational efficiency.

Aggregated EV Availability with EV Management for EVs from (a) International market (b) Indian market.
Analysis of V2G capacity characteristics presented in Fig. 10 demonstrates the operational viability of aggregated electric vehicles as distributed energy resources within the grid infrastructure. Under implemented management protocols3, the test network exhibited aggregate EV availability coefficients ranging from 0.10 to 0.20 during peak loading periods. This empirical evidence substantiates the feasibility of V2G-enabled EV fleets serving as supplementary power sources during critical grid operational states, effectively functioning as distributed storage systems capable of providing emergency power support. The demonstrated availability patterns suggest significant potential for integration of V2G resources into grid emergency response protocols.
Dynamic pricing for charging EVs
Figure 11 demonstrates the temporal correlation between Time-of-Use (ToU) dynamic pricing mechanisms for EV charging and aggregate residential-commercial load profiles. The pricing algorithm exhibits inverse relationship with demand patterns, characterized by rate minimization during off-peak intervals (08:00–12:00 h) coinciding with reduced demand, and significant rate escalation during peak consumption periods (18:00–22:00 h). Residential load follows a similar pattern, reaching its lowest level at midday and peaking in the evening, which coincides with the highest electricity prices. Commercial load, though generally lower than residential demand, also increases after 10 h, peaking around 20 h. This strong correlation between electricity prices and load demand emphasizes the importance of incentivizing EV charging during off-peak hours, ensuring grid stability and reducing operational costs. Encouraging smart charging strategies and Vehicle-to-Grid (V2G) integration can help flatten the demand curve and prevent grid congestion caused by uncontrolled EV charging during peak periods.

Time-of-Use (ToU) Dynamic Pricing and Load Demand Correlation for EV Charging.
Comparison of RDA and PSO
To validate the convergence and correctness of the proposed Red Deer Algorithm (RDA), a comparative analysis was conducted against the widely used Particle Swarm Optimization (PSO) algorithm. Figure 12 presents comparative convergence characteristics of both algorithms, illustrating the temporal evolution of fitness values across 100 iterative cycles.

Convergence Comparison of Red Deer Algorithm (RDA) and Particle Swarm Optimization (PSO).
From Fig. 12, it is evident that RDA demonstrates a significantly faster convergence rate compared to PSO. The RDA achieves a lower fitness value within the first few iterations, indicating a more efficient search capability in reaching near-optimal solutions. In contrast, PSO exhibits a slower descent and stagnates at a suboptimal solution for a longer period before showing minor improvements later in the iterations.
Key observations from the comparative analysis include:
-
Faster Convergence of RDA: The RDA algorithm rapidly decreases the fitness value within early iterations, reaching an optimal or near-optimal solution much faster than PSO. The accelerated convergence to optimal or near-optimal solutions, relative to PSO, indicates enhanced exploration-exploitation equilibrium in the search space dynamics.
-
Stability of Converged Solution: RDA demonstrates superior terminal convergence characteristics, achieving stabilization at a lower fitness value threshold compared to PSO. This reduced terminal fitness value validates RDA’s enhanced capability in identifying global optima for complex optimization problems.
-
PSO Convergence Limitation: PSO algorithm exhibits persistent elevation in fitness values over extended iteration cycles, indicating reduced adaptation efficiency within complex solution spaces. This prolonged maintenance of higher fitness levels suggests compromised search space exploration capabilities, potentially resulting in premature convergence to local optimal solutions rather than global minima.
-
Performance Comparison of RDA and PSO: The performance comparison of two optimization methods on the IEEE 69-bus system, PSO and RDA, is shown in this convergence graph. PSO’s goal function begins at a high value and then progressively drops with very slight variations. It takes about 83 iterations to reach a final value and shows a slower rate of convergence than RDA. In contrast, RDA likewise begins at a high value but declines more quickly in the initial iterations. Compared to PSO, it stabilizes earlier and shows a more noticeable improvement in the first 55 iterations.
These findings confirm the effectiveness of the proposed optimization framework in minimizing power losses, improving voltage stability, and optimizing EV charging schedules. The results further demonstrate that the Red Deer Algorithm (RDA) outperforms Particle Swarm Optimization (PSO) in terms of convergence speed and solution quality. The final section provides a summary of key insights, highlights existing limitations, and proposes future research directions to enhance the seamless integration of EVs into smart grid systems.
Conclusion
This study provides a comprehensive analysis of EVs charging practices, their impact on distribution systems, and the effectiveness of the proposed scheduling strategies using Red Deer Algorithm (RDA). Two distinct EV models – selected from International and Indian markets, respectively - differing in battery capacity and range, to ensure a broad applicability of the findings.
The simulations of hourly energy demand profiles demonstrated strong correlation with actual EV charging behavior, validating the accuracy of our models. Peak demands for both EV types occurred during morning (8 AM to 10 AM) and evening (6 PM to 10 PM) hours, highlighting critical periods for potential network stress.
The comparison between EV and household power demands underscored the significant increase in network load due to EV charging, particularly during peak hours. This emphasized the need for effective EV charging regulation to mitigate high load demands across distribution networks.
To address these challenges, an EV scheduling strategy that simultaneously optimizes two objectives: maximizing power and reducing power losses, using the Red Deer Algorithm (RDA) was proposed. This approach demonstrated remarkable effectiveness in maintaining transformer utilization below rated capacity and voltage levels within specified ranges, even under high EV penetration scenarios. Key achievements of our proposed strategy include:
-
1.
Significant decrease in power loss, even with a large fleet of EVs connected to the grid simultaneously for charging and discharging operations.
-
2.
Improved voltage profiles and consistent EV aggregate power.
-
3.
Reduced EV charging times, even during peak hours.
-
4.
Potential increase in the hosting capacity of distribution networks.
The Customer Impact Level (CIL) metric revealed that while charging disruptions increase with higher EV penetration levels, the impact remains manageable. This demonstrates the positive influence of our EV scheduling on network efficiency while minimizing disruptions to EV users.
Furthermore, the study highlighted the potential of Vehicle-to-Grid (V2G) technology. With EV management in place, we observed an aggregated EV availability of 10–20% during peak hours, suggesting that V2G-enabled EVs could serve as a valuable supplementary power source during emergency situations.
The proposed solution proves to be practical and scalable for similar aggregator- Distribution System Operators (DSO) approaches. Additionally, our EV scheduling model allows for quantification of potential network resources to assist in maintaining the equilibrium between demand and generation.
In conclusion, this research emphasizes the crucial role of intelligent EV charging management in ensuring grid stability and efficiency as EV adoption continues to grow. The proposed scheduling strategies show promise in maximizing network capacity while minimizing disruptions to EV users, paving the way for smoother integration of EVs into existing power distribution systems. These findings provide valuable insights for both EV aggregators and DSOs in optimizing their operations and planning for a future with increased EV penetration.
Data availability
The datasets used and/or analyzed during the current study are available from the corresponding author on reasonable request.
References
Hajibandeh, N., Ehsan, M., Soleymani, S., Shafie-khah, M. & Catalão, J. P. S. Prioritizing the effectiveness of a comprehensive set of demand response programs on wind power integration. Int. J. Electr. Power Energy Syst. 107, 149–158 (2019).
Wang, F. et al. The values of market-based demand response on improving power system reliability under extreme circumstances. Appl. Energy. 193, 220–231 (2017).
Golmohamadi, H., Keypour, R., Bak-Jensen, B. & Pillai, J. R. A multi-agent based optimization of residential and industrial demand response aggregators. Int. J. Electr. Power Energy Syst. 107, 472–485 (2019).
Zinoviev, V., Nikolova, S. & Koeva, D. The Economic Potential of the Vehicle to the Grid, in 2024 International Conference on Applied and Theoretical Electricity (ICATE), pp. 1–9. (2024).
Micari, S. & Napoli, G. Electric Vehicles for a Flexible Energy System: Challenges and Opportunities, Energies, 17(22), 5614 https://doi.org/10.3390/en17225614 (2024).
Ibrahim, R. A., Gaber, I. M. & Zakzouk, N. E. Analysis of multidimensional impacts of electric vehicles penetration in distribution networks. Sci. Rep., 14(1), 27854 (2024).
Wu, W. et al. A coordinated model for multiple electric vehicle aggregators to grid considering imbalanced liability trading. IEEE Trans. Smart Grid. 15 (2), 1876–1890 (2024).
Cruz, C., Alskaif, T., Palomar, E. & Bravo, I. Prosumers integration in aggregated demand response systems, Energy Policy 182, 113745 (2023).
Li, K. et al. A business model incorporating harmonic control as a Value-Added service for Utility-Owned electricity retailers. IEEE Trans. Ind. Appl. 55 (5), 4441–4450 (2019).
Fu, Z., Sun, X., Yu, W. & Ren, P. Distributed energy collaborative control strategy for grid-connected electric vehicles, in IEEE 4th International Conference on Electronic Technology, Communication and Information (ICETCI), 2024, pp. 1507–1511. (2024).
Hou, H. et al. Peer-to-peer energy trading among multiple microgrids considering risks over uncertainty and distribution network reconfiguration: A fully distributed optimization method. International Journal of Electrical Power & Energy Systems 153, 109316 (2023).
Amamra, S. A. & Marco, J. Vehicle-to-Grid aggregator to support power grid and reduce electric vehicle charging cost. IEEE Access. 7, 178528–178538 (2019).
E. COMMISSION, Proposal for a Directive of the European Parliament and of the Council on common rules for the internal markets in renewable and natural gases and in hydrogen (recast), 2021, Available: https://eur-lex.europa.eu/legal-content/EN/TXT/HTML/?uri=CELEX%3A52021SC0457
Turker, H. & Bacha, S. Optimal minimization of Plug-In electric vehicle charging cost with vehicle-to-Home and vehicle-to-Grid concepts. IEEE Trans. Veh. Technol. 67 (11), 10281–10292 (2018).
Klaina, H. et al. Aggregator to electric vehicle LoRaWAN based communication analysis in vehicle-to-Grid systems in smart cities. IEEE Access. 8, 124688–124701 (2020).
Monteiro, V., Pinto, J. G. & Afonso, J. L. Operation modes for the electric vehicle in smart grids and smart homes: present and proposed modes. IEEE Trans. Veh. Technol. 65 (3), 1007–1020 (2016).
Nunna, H. S. V. S. K., Battula, S., Doolla, S. & Srinivasan, D. Energy management in smart distribution systems with Vehicle-to-Grid integrated microgrids. IEEE Trans. Smart Grid. 9 (5), 4004–4016 (2018).
Ginigeme, K. & Wang, Z. Distributed optimal Vehicle-To-Grid approaches with consideration of battery degradation cost under Real-Time pricing. IEEE Access. 8, 5225–5235 (2020).
Liu, Z., Wang, D., Jia, H., Djilali, N. & Zhang, W. Aggregation and bidirectional charging power control of Plug-in hybrid electric vehicles: generation system adequacy analysis. IEEE Trans. Sustain. Energy. 6 (2), 325–335 (2015).
Zhou, Z., Wang, B., Dong, M. & Ota, K. Secure and efficient Vehicle-to-Grid energy trading in cyber physical systems: integration of blockchain and edge computing. IEEE Trans. Syst. Man. Cybernetics: Syst. 50 (1), 43–57 (2020).
Wu, D., Chau, K. T., Liu, C., Gao, S. & Li, F. Transient stability analysis of SMES for smart grid with Vehicle-to-Grid operation. IEEE Trans. Appl. Supercond. 22 (3), 5701105–5701105 (2012).
Chen, X., Leung, K. C., Lam, A. Y. S. & Hill, D. J. Online scheduling for hierarchical Vehicle-to-Grid system: design, formulation, and algorithm. IEEE Trans. Veh. Technol. 68 (2), 1302–1317 (2019).
Jiménez-Marín, A. & Pérez-Ruiz, J. A Robust Optimization Model to the Day-Ahead Operation of an Electric Vehicle Aggregator Providing Reliable Reserve, Energies. 14(22), 7456 https://doi.org/10.3390/en14227456 (2021).
Rajagopalan, A. et al. Multi-objective energy management in a renewable and EV-integrated microgrid using an iterative map-based self-adaptive crystal structure algorithm. Sci. Rep., 14(1), 15652 (2024).
Ch, H. B., K, R. R., Kamwa, D. C. I. & Muyeen, S. M. A novel on intelligent energy control strategy for micro grids with renewables and EVs, Energy Strategy Reviews 52, 101306 (2024).
Madhavaram, P. R. and M. M, Smart Energy Management Strategy for Microgrids Powered by Heterogeneous Energy Sources and Electric Vehicles’ Storage. Energies. 15(20), 7739 https://doi.org/10.3390/en15207739 (2022).
Hai, T., Zhou, J., Alazzawi, A. & Muranaka, T. Management of renewable-based multi-energy microgrids with energy storage and integrated electric vehicles considering uncertainties. Journal of Energy Storage. 60, 106582 (2023).
Tan, B. et al. Distributionally robust energy management for multi-microgrids with grid-interactive EVs considering the multi-period coupling effect of user behaviors. Applied Energy. 350, 121770 (2023).
Hassan, M. Machine learning optimization for hybrid electric vehicle charging in renewable microgrids. Sci. Rep., 14(1), 13973 (2024).
K, U. N. S. S. Optimizing electric vehicle charging infrastructure through hybrid machine learning techniques for smart energy management. Int. J. Electr. Electron. Eng. 11 (7), 148–158 (2024).
Singh, A. & Bhongade, S. Enhancing Electric Vehicle Charging Stations with Renewable Energy Integration through Advanced Control Algorithms, in IEEE Third International Conference on Power Electronics, Intelligent Control and Energy Systems (ICPEICES), 2024, pp. 797–801. (2024).
Güven, A. F. Integrating electric vehicles into hybrid microgrids: A stochastic approach to future-ready renewable energy solutions and management. Energy. 303, 131968 (2024).
Kraiem, H., Gadri, W. & Flah, A. Efficient energy management with emphasis on EV charging/discharging strategy. Eng. Technol. Appl. Sci. Res. 14(2), 13143–13147 (2024).
Ren, H. et al. Optimal scheduling of an EV aggregator for demand response considering triple level benefits of three-parties. International Journal of Electrical Power & Energy Systems. 125, 106447 (2021).
Chandra, I., Singh, N. K. & Samuel, P. A comprehensive review on coordinated charging of electric vehicles in distribution networks. Journal of Energy Storage. 89, 111659 (2024).
Carreiro, A. M., Jorge, H. M. & Antunes, C. H. Energy management systems aggregators: A literature survey. Renew. Sustain. Energy Rev. 73, 1160–1172 (2017).
Rigas, E. S., Ramchurn, S. D. & Bassiliades, N. Algorithms for electric vehicle scheduling in large-scale mobility-on-demand schemes. Artif. Intell. 262, 248–278 (2018).
Kapoor, A., Gangwar, P., Sharma, A. & Mohapatra, A. Multi-Objective Framework for Optimal Scheduling of Electric Vehicles, in 21st National Power Systems Conference (NPSC), pp. 1–6. (2020).
Fathollahi-Fard, A. M., Hajiaghaei-Keshteli, M. & Tavakkoli-Moghaddam, R. Red deer algorithm (RDA): a new nature-inspired meta-heuristic. Soft. Comput., 24(19), 14637–14665 (2020).
Moghadam, P. & Ahmadi, A. A novel two-stage bio-inspired method using red deer algorithm for data clustering. Evol. Intel., 17(3), 1819–1836 (2024).
Gulec, O. & Sahin, E. Red deer algorithm based nano-sensor node clustering for iont. J. Netw. Comput. Appl. 213, 103591 (2023). 2023/04/01/.
Tang, Z., Xue, B., Ma, H. & Rad, A. Implementation of PID controller and enhanced red deer algorithm in optimal path planning of substation inspection robots. J. Field Robot., 41(5) 1426–1437 (2024).
Zitar, R. A., Abualigah, L. & Al-Dmour, N. A. Review and analysis for the red deer algorithm. J. Ambient Intell. Humaniz. Comput., 14(7), 8375–8385 (2023).
Amin, A. et al. A Review of optimal charging strategy for electric vehicles under dynamic pricing schemes in the distribution charging network. Sustainability. 12(23), 10160 https://doi.org/10.3390/su122310160 (2020).
Lepolesa, L. J., Adetunji, K. E., Ouahada, K., Liu, Z. & Cheng, L. Optimal EV charging strategy for distribution networks load balancing in a smart grid using dynamic charging price. IEEE Access. 12, 47421–47432 (2024).
TATA.EV. Available: https://ev.tatamotors.com/nexon/ev.html (2024).
Luxury Sedan Car in India - BYD SEAL. Available: https://bydautoindia.com/bydseal (2024).
Hyundai. Hyundai IONIQ 5 Car Specifications: Battery, Transmission & Dimensions | Hyundai India Available: https://ioniq5.hyundai.co.in/specification (2024).
Nissan Leaf e+ [Internet]. EV Database. Available: https://ev-database.org/uk/car/1144/Nissan-Leaf-eplus (2022).
MG ZS EV Long Range [Internet]. EV Database.. Available: https://ev-database.org/car/1541/MG-ZS-EV-Long-Range (2021).
Mercedes-Benz EQS AMG 53 4MATIC+ [Internet]. EV Database.. ( Available: https://ev-database.org/car/1537/Mercedes-Benz-EQS-AMG-53-4MATICplus 2022).
Acknowledgements
This work was funded by the University of Jeddah, Jeddah, Saudi Arabia, under grant No. (UJ-23-SRP-10). The authors, therefore, thank the University of Jeddah for its technical and financial support.
Funding
University of Jeddah, Jeddah, Saudi Arabia, grant No. (UJ-23-SRP-10).
Author information
Authors and Affiliations
Contributions
Conceptualization, Habib Kraiem, Nejib Ghazouani, Sahbi Boubaker, Souad Kamel, Adel Mellit, Faisal S. Alsubaei, Farid Bourennani, Walid Meskine and Tariq Alqubaysi; Data curation, Souad Kamel and Tariq Alqubaysi; Formal analysis, Sahbi Boubaker, Souad Kamel and Adel Mellit; Funding acquisition, Sahbi Boubaker; Investigation, Adel Mellit; Methodology, Habib Kraiem and Farid Bourennani; Project administration, Sahbi Boubaker; Resources, Faisal S. Alsubaei; Software, Nejib Ghazouani and Souad Kamel; Supervision, Sahbi Boubaker; Validation, Sahbi Boubaker, Faisal S. Alsubaei and Walid Meskine; Writing – original draft, Habib Kraiem and Nejib Ghazouani; Writing – review & editing, Sahbi Boubaker and Farid Bourennani.
Corresponding authors
Ethics declarations
Competing interests
The authors declare no competing interests.
Additional information
Publisher’s note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Electronic supplementary material
Below is the link to the electronic supplementary material.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution-NonCommercial-NoDerivatives 4.0 International License, which permits any non-commercial use, sharing, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if you modified the licensed material. You do not have permission under this licence to share adapted material derived from this article or parts of it. The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by-nc-nd/4.0/.
About this article

Cite this article
Boubaker, S., Kraiem, H., Ghazouani, N. et al. Multi-objective optimization framework for electric vehicle charging and discharging scheduling in distribution networks using the red deer algorithm. Sci Rep 15, 13343 (2025). https://doi.org/10.1038/s41598-025-97473-7
Received:
Accepted:
Published:
Version of record:
DOI: https://doi.org/10.1038/s41598-025-97473-7
