
Abstract
This paper conducts theoretical and experimental research on the docking lock of the space station docking mechanism, aiming to predict its long-term service life. By analyzing the working principle and load transmission path of the docking lock, a theoretical model based on the material performance degradation mechanism is established, and the life degradation equation of key components under service conditions is derived. Additionally, accelerated performance degradation tests with temperature as the accelerated stress were conducted to validate the accuracy of the theoretical model. The results show that the life prediction error of the theoretical model is less than 5%, demonstrating that the docking lock can operate safely for over 15 years. Through stress relaxation and creep tests, relevant parameters were fitted, and numerical calculations and experimental verification confirmed that when the initial load is 37 kN, the attenuation value of the locking force after 15 years of service is less than 10%, and the remaining locking force still meets the safety service requirements. These findings provide crucial insights into the design and optimization of docking locks, providing technical support for the design of docking mechanisms for future space stations and other spacecraft, and have important engineering application value.
Similar content being viewed by others


Introduction
As the executive component of space rendezvous and docking, the docking lock provides a locking force for the rigid connection of two spacecraft. It is the critical structure to achieve seal, rigid connection, and separation between two spacecraft. It plays an irreplaceable role in the space station’s on-orbit assembly, maintenance, and normal operation1.
The locking force of the docking lock is an important index to measure its service performance. Under service conditions, the locking force will decrease due to stress relaxation and creep of the materials of the various components of the docking lock system. Stress relaxation generally occurs in structures that are subjected to high temperatures or preload loads2, which will lead to a gradual decrease in the preload of components over time. A large number of scholars have studied the effect of stress relaxation on the properties of titanium alloy and aluminum alloy materials. Based on the Arrhenius constitutive model, Bi3 established a high-temperature short-term creep constitutive equation suitable for Ti-6Al-4 V titanium alloy ultrathin sheet. Li4 studied the stress relaxation behavior of silicone rubber samples under different temperatures and simulated operating conditions. The results show that the stress relaxes exponentially with time at 25% strain level. Peng5 studied the effects of temperature and cyclic loading on the stress relaxation (SR) behavior of Ti-6Al-4 V titanium alloy, and found that the SR limit and rate varied with increasing temperature and cyclic loading time. Nong6 studied the stress relaxation behavior of T9A spiral compression spring through experiments and finite element analysis, and corrected the constitutive relationship through long-term stress relaxation experiments at 90 °C ~ 150 °C. Creep refers to the phenomenon that the strain of solid material increases with time under the condition of keeping the stress unchanged7,8. The typical creep curve is divided into three stages: deceleration creep, steady-state creep, and accelerated creep9. Hu10 established a creep-fatigue coupling damage model based on damage mechanics for steam turbine blades and conducted in-depth research on the mechanism of creep-fatigue crack propagation. Khalafi11 conducted creep tests on 2024-T3 aluminum alloy under different temperatures and stress conditions and proposed a mathematical relationship between strain rates at 90 MPa and 125 MPa, which can be used to predict creep strain rates under isothermal conditions.
For highly reliable docking locks, obtaining on-site fault information in a short time is impossible. Therefore, accelerated life testing is introduced to shorten testing time by increasing stress levels12,13. Then, by “re-scaling” the test data it is possible to estimate reliability and predict lifetime under normal conditions14,15. Wang16 studied the stress relaxation law of spiral compression springs under high temperatures, and predicted the service life of springs using an acceleration model. Jiang17 conducted a data-driven degradation analysis on the aircraft cabin door locking mechanism and proposed a residual life prediction model. Zhang18 proposed a bearing accelerated life test model that considers the correlation between different failure modes of solid lubricated bearings, and conducted solid lubricated rolling bearing tests. Long19 proposed an accelerated degradation test plan for magnetoresistive sensors and established a life prediction model based on performance degradation trajectories. Zhang20 proposed a novel Bayesian framework to do reliability analysis by synthesizing multisource data, including bivariate degradation data and lifetime data, and verifies the usability of the model by a practical case study of a satellite RLB.
This paper is organized as follows. In Sect. 2, the working principle of the docking lock is explained and the mathematical model for predicting the life of docking locks is established. Section 3 solved the mathematical model for predicting the life of the docking lock. In Sect. 4, the acceleration performance degradation test of the docking lock is conducted to derive the locking force degradation equation under normal service temperature and to calculate the remaining locking force. Finally, Sect. 5, concludes this article.
Working principle and theoretical model
In this section, the structure and working principle of the docking lock are first introduced. On this basis, combined with the locking force transfer path, the life prediction theoretical model is established to provide a theoretical basis for predicting the service life of the docking lock.
Working principle and load transmission path analysis of Docking lock
A set of docking lock consists of two pairs of docking lock hooks and two docking lock boxes. The three-dimensional models of docking hooks and lock boxes are shown in Fig. 1.

3D model diagram of docking lock box and lock hook. This figure was generated using Pro/ENGINEER 5.0 (https://www.ptc.com).
The docking lock uses a self-locking mechanism for secure locking. The motor and wire rope rotate the eccentric shaft, moving the active lock hook downward to compress the disc spring in the passive hook, creating a locking force. This force is maintained by the disc spring, which is crucial for the lock’s integrity. If the force drops below the design limit, the lock can fail or decouple, impacting the space station’s safety.
Due to the complexity of the docking lock, creating a mathematical model is not straightforward. The initial step involves analyzing the force transmission path and identifying key components that affect the lock’s force. With consideration of the lock’s working principle and part degradation characteristics, less influential components are simplified or disregarded to ensure conservative results. This process yields a streamlined force transmission path, which is used to develop the theoretical model.
In the initial state, the locking force is 37 kN (constant load), which means that all parts are subjected to this force and exhibit elastic deformation, forming an equilibrium state of two hooks locking. The load transmission paths of the active/passive lock hook are shown in Figs. 2 and 3, respectively.

Complete force transmission path of passive lock hook assembly.

Complete force transmission path of active lock hook assembly.
Assumptions
To develop a theoretical model for predicting the docking lock’s lifespan, several assumptions were made for the contact to locking and service process of the docking lock. The nomenclature of parameters in the equations is listed in Table 1, and the ΔF, ΔL are considered as a scalar.
-
1.
The material of lock hook and eccentric sleeve is titanium alloy, their elastic deformation should be considered because of their relatively large size. The lock box is made of aluminum alloy, which has a lower elastic modulus compared to titanium alloy and may undergo significant elastic deformation. Therefore, they should be considered as deformable bodies. The deformation of the support plate and the lock pin is relatively small, and the change in deformation is minimal when stress relaxation occurs in the locking system. Therefore, they can be regarded as rigid bodies. The lock nut and the upper/lower guide sleeve have elastic deformation along the thickness direction, but due to their small thickness, the amount of elastic deformation is also small, so they can be regarded as rigid bodies. The deformation of the explosion bolt has no effect on the deformation of the disc spring, so it can be regarded as a rigid body.
-
2.
The disc spring is subject to elastic deformation and stress relaxation, and other parts like the lock hooks and eccentric sleeve also experience elastic and creep deformation.
-
3.
After locking, the active hook and passive hook will always maintain a mutually tensile state under constant load, which can be regarded as a whole. When the disc spring undergoes stress relaxation, the tensile load between the active/passive hooks decreases, and the tensile deformation of the active/passive hooks will decrease. There is a certain relationship between the decrease in tensile load and the decrease in tensile deformation21, which can be characterized by the equivalent deformation coefficient of the hooks.
-
4.
After locking, the locking force acts on the upper and lower boxes through the passive lock pin, explosive bolts, eccentric shafts, and other parts. The lock box will inevitably undergo elastic deformation, but the deformation near the stress area is the largest, and the deformation away from the stress area is very small and can be ignored22.
-
5.
The whole lock system is a force balance system. Even if the disc spring undergoes stress relaxation, the lock system will maintain a state of force balance. In addition, the active/passive lock system includes two balances: force balance and torque balance. The balance of the force means that the force of each part in the lock system is equal, and the centerline of the force transmission surface of the upper/lower lock hooks is on the same line as the center line of the disc spring and the center of the eccentric shaft, that is, on a force line.
-
6.
When the disc spring undergoes stress relaxation, the force on the disc spring will decrease, causing the force of all parts on the force transmission path to decrease. Through the coordination between the deformations of each part, the force will be rebalanced, and the force of each part is still equal; that is, the reduction of the force of each part is also equal.
Based on the above assumptions, a reasonable simplification of the transmission path of the docking lock force can be obtained. The resulting predictions are conservative and feasible, allowing for the determination of the final force transmission path, as shown in Figs. 4 and 5.

The simplified final force transmission path of the active lock hook.

The simplified final force transmission path of the passive lock hook.
Construction of long-life prediction theoretical model
Based on assumptions, it can be concluded that,
After the stress relaxation of the disc spring, the locking force decreases and the force balance is reestablished.
Analysis of the deformation of each part caused by the attenuation of locking force:
Substitute Eqs. (6)-(8) into Eq. (9) and organize into,
Solution of theoretical model for life prediction
Determination of model parameters
To determine the unknown parameters in the theoretical model, creep/relaxation tests are conducted on the disc spring and the materials of each part. Based on the acceleration theory, the performance degradation equations of each part under service conditions are derived from test data under high stress conditions. The test scheme is shown in the Table 2.
Determination of disc spring parameters
The stress relaxation of disc spring is essentially a thermal activation process of movable dislocation motion driven by elastic strain energy23, therefore the stress relaxation of the disc spring satisfies the thermal activation theory24. According to the Arrhenius formula:
where Vs is the relaxation rate, which is the index of relaxation dynamics and represents the rate of relaxation, it can be defined as the slope of the stress relaxation curve, Q is the activation energy, generally a constant independent of temperature, γ is the pre-actor, or Arrhenius constant, k is the molar gas constant, and T is the absolute temperature. Take logarithms of both sides of Eq. (11).
It can be seen that the logarithm of the relaxation rate is proportional to the reciprocal of the temperature. Based on the stress relaxation test results of disc spring, a curve is drawn as shown in Fig. 6(a).The curves of the load loss rate of the disc spring and the logarithm of time at 90 ~ 180 °C are shown in Fig. 6(b), and the second stage of stress relaxation is linearly fitted. The fitting results in Fig. 6(b)are shown in Table 3.

Stress relaxation curve at 90 ~ 180 °C with an initial load of 37 kN. (a) load time curve; (b) fitting curves of load loss rate; (c) fitting results of stress relaxation rate and temperature.
In Table 3, A represents the intercept in the fitting equation of the stress relaxation second stage of materials, and B represents the slope in the fitting equation of the stress relaxation second stage of materials. lnVs~1/T is plotted to investigate the influence of temperature on the relaxation rate Vs of the disc spring (Vs is the slope B in the equation of the second stage of stress relaxation), as shown in Fig. 6(c). It can be seen that the test points at four temperatures are basically on a straight line, and the linear equation after linear fitting is
The correlation coefficient is 0.91647, it can be considered that lnVs and 1/T satisfy a linear relationship. Therefore, the stress relaxation process of the disc spring conforms to the thermal activation theory. The slope of the second stage equation of stress relaxation at room temperature (Brt) can be extrapolated using thermal activation theory. In Eq. (11), let Vs=d(ΔP/P0)/dt,
The logarithmic of the load loss rate after one hour of stress relaxation of the disc spring lnA is linearly related to the reciprocal of temperature 1/T. The load loss rate of the disc spring stress relaxation for one hour at four temperatures is shown in Table 4.
Plot lnA ~ 1/T and fit the curve based on the data in Table 4 to obtain lnA = −1788.18613/T + 0.67288, and the correlation coefficient of the fitting curve is 0.99876. Therefore, the intercept of the second stage stress relaxation of the disc spring at room temperature (Art) can be calculated. The service time of each part of the docking mechanism is calculated as 365 days per year and 24 h per day, so as to obtain the load loss rate of the disc spring (ΔP/P0) in service for 15 years at room temperature. Ultimately, it can obtain the degradation of disc spring force due to stress relaxation ΔFRd = ΔP = 3075.514 N.
Equivalent deformation coefficient of disc spring,
With a stiffness of 20,582 N/mm and an initial deformation of 1.7977 mm under a 37,000 N force, the disc spring’s equivalent deformation coefficient after 15 years of service at room temperature is calculated to be 18871.05 N/mm, assuming constant deformation and decreasing force due to stress relaxation.
Determination of other component parameters
The creep test results of TC4R, TB2, and 7A04 material are shown in Fig. 7. The total deformation of material is constant during stress relaxation25,26, and it meets the requirements of
Where εe and εc represent elastic deformation and creep deformation, respectively. According to Hooke’s law, further obtained
According to Eq. (16), the creep and stress relaxation of the material can be transformed into each other. The stress relaxation curves of TC4R is drawn and the stress relaxation rate in the stable relaxation stage is fitted, as shown in Fig. 8(a).

Creep curves of various metal materials at different temperatures under experimental stress of 0.8 σ0.2: (a) Titanium alloy TC4R; (b) Titanium alloy TB2; (c) Aluminum alloy 7A04.

(a) Stress relaxation curves of titanium alloy TC4R at four temperatures; (b) The relationship between relaxation rate and temperature in the second stage of TC4R stress relaxation.
The stress relaxation curves across four temperature groups reveal a linear relationship between the TC4R material’s stress reduction (Δσ) and the logarithm of time (lnt). The curve of lnA ~ 1/T is plotted with reference to the data processing method of stress relaxation of the disc spring, as shown in Fig. 8(b). The test points at four groups of temperatures are basically on a straight line. The data are linearly fitted, and the linear equation obtained is
The fitting correlation coefficient is 0.91716. This linearity confirms that TC4R titanium alloy’s stress relaxation from 90 to 180 °C follows thermal activation theory. At room temperature and a load of 37,000 kN, the material’s stress relaxation rate in the secondary stage is calculated as Art=27.400, Brt=1.4682. After 15 years of service, the stress relaxation causes a force degradation of 44.704 N in the eccentric sleeve.
The main factors affecting the equivalent deformation coefficient of the components are the elastic modulus and geometric shape. The elastic modulus and creep curves of TC4R, TB2, and 7A06 at different temperatures are obtained by tensile and creep tests. Based on the finite element simulation analysis, establish simulation models for eccentric sleeve, locking hooks, and locking box, and obtain the relationship between tension and deformation by fixing one end and applying a simple force at the other end, in order to fit the equivalent deformation coefficient of the eccentric sleeve and other parts. For computational simplicity, an equivalent modulus (E’) is defined to represent material property changes during stress relaxation, where stress decreases while strain remains constant.
According to the tensile test data of TC4R, combined with Eq. (18), when σ0 = 660 MPa, the equivalent modulus of TC4R after stress relaxation at room temperature E’=110208.85 MPa. The equivalent deformation coefficient of the eccentric sleeve after stress relaxation, i.e. the slope of the curve EP = ΔF/Δu = 506,792 N/mm.
The data processing method for TB2 and 7A06 materials is the same as the TC4R.
Numerical solution of theoretical model for life prediction
Based on the above analysis, the various parameters of the theoretical model are summarized as shown in Table 5.
By incorporating the data in Table 5 into Eq. (10), it can be calculated that ΔFRa=2831.04 N, which means that the locking force of the docking lock has decreased by 7.655% after 15 years of service.
Experimental analysis
In this section, through the accelerated performance degradation test of the docking lock, the reliability and life parameters of the docking lock under the normal stress level are derived by using the performance degradation data under the high stress level. A reliability model based on pseudo-failure life is established, to evaluate and predict the life of the docking lock and verify the correctness of the life prediction theoretical model.
Test stress

Test stress profile.
The acceleration performance degradation test of the docking lock is divided into three groups, and each group of tests is restarted by replacing a set of docking locks. With 37 kN as the initial load and temperature as the acceleration stress, each group of experiments is carried out under five temperature loads (75 °C, 85 °C, 95 °C, 105 °C, 115 °C) for a total of 90 days, as shown in Fig. 9.
Test equipment
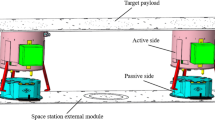
The docking lock acceleration performance degradation test equipment, as shown in Fig. 10, is used for the ground test verification of the docking lock under the long-term on-orbit stress environment. It can continuously measure and record the tensile attenuation of the test product for a long time under the conditions of given ambient temperature and keeping the deformation in the force direction unchanged.

The docking lock acceleration performance degradation test equipment.
Analysis of experimental data
Acceleration model
When temperature is used as an accelerated stress, the relationship between the reaction rate and temperature follows the Arrhenius model of Eq. (11). Let Vs=dM/dt, where M is the product characteristic value or degradation amount, t is the degradation time, and dM/dt is the reaction rate27.
When T remains constant, integrating both sides of Eq. (11) with time.
Transform Eq. (19) to
At experimental temperatures T1 and T2, the reaction rates are \(\gamma {e^{ - Q/k{T_1}}}\)and \(\gamma {e^{ - Q/k{T_2}}}\), and the reaction times are t1 and t2, respectively. Other conditions remain unchanged, in order to produce the same amount of degradation, it is necessary to satisfy28,29]
Assuming the ratio of t1 to t2 is the temperature acceleration coefficient τ, then
By taking the logarithms on both sides of Eqs. (19),
That is,
Where, a = ln(ΔM/A), b = E/(kBT). Equation (24) is commonly referred to as the acceleration model or equation. In Eq. (24), a and b are constants determined by the experiment, and the logarithm of product life t is directly proportional to the reciprocal of test temperature T.
Linear degradation model
The change rate (degradation rate) of the linear degradation model is a constant, that is,
Where, y(t) is the degradation, t is the degradation time, c is the intercept of the linear degradation model, and d is the slope of the linear degradation model. If the degradation is not a linear function of time, a linear relationship can be obtained by performing some transformation on y(t) or t. Common transformations include the following
Where, y is the measured value of product degradation at time t, and c and d are unknown parameters that can be obtained through linear fitting of y and t. The feature in the linear degradation model should be consistent with the feature in the acceleration Eq. (24), and Eq. (26) can be transformed into
That is,
Where, α=–c/d, β = 1/d, α and β are the parameters obtained through linear fitting of t and y.
Test data
The original data of the three sets of docking lock acceleration performance degradation tests are shown in Fig. 11.

Three sets of docking lock acceleration performance degradation test data.
Due to the long cycle and large amount of data in the acceleration performance degradation test of the docking lock, the detection time points are selected at certain time intervals under the stress profile of each group of tests, and the data at the corresponding detection points are analyzed.
The detection time intervals at each temperature are shown in Table 6.
According to the linear degradation model, the degradation data is plotted according to different temperatures, the degradation of the locking force and time at each detection time point subtract from the degradation and time of the last time point of the previous temperature stress to obtain yni–\({y_{n - 1{t_{n - 1}}}}\)1and tni–tn–1. Three sets of degradation trajectory equations for the docking lock at each temperature are fitted, as shown in Table 7. If the slope in each degenerate trajectory equation is k, then ln(1/k) ~ 1/T. Fit the curves of slope and temperature in the three sets of acceleration performance degradation equations of the docking lock, as shown in Fig. 12. Based on the curve fitting results, the degradation trajectory equations of the three sets of docking locks are summarized in Table 8.

The slope-temperature fitting curve of the degradation trajectory equation for three sets of docking locks.
The locking force attenuation values of the three sets of docking locks during the 15-year service period at room temperature are 3448.55 N, 2296.65 N, and 2909.91 N, respectively. Among them, the curve fitting degree of the third set of docking lock is the highest, its locking force is attenuated by 7.865%, and the remaining locking force of 34.09 kN. Compare the results of the acceleration performance degradation test with the calculation results of the life prediction theoretical model, as shown in Table 9.
The error between the acceleration performance degradation test results and the theoretical model solution results is only 2.67%. The accelerated performance degradation test controls the initial displacement of the active and passive lock hook to make its initial locking force 37 kN, which is consistent with the theoretical model. According to the comparison of the results, the solution results of the theoretical model are very close to the analysis results of the test data, which can effectively verify the accuracy of the theoretical model of the docking lock life prediction.
Conclusion
This paper focuses on the docking lock of the space station docking mechanism. By analyzing its working principle and load transmission path, a theoretical model for life prediction based on the material performance degradation mechanism was established. The life degradation equation of key components under service conditions was derived using basic performance degradation data and finite element analysis. The accuracy of the theoretical model was validated through accelerated performance degradation tests with temperature as the accelerated stress. The results indicate that the life prediction error of the theoretical model is less than 5%, demonstrating that the docking lock can serve safely for over 15 years.
Through stress relaxation tests on the disc spring and creep tests on titanium alloys TB2 and TC4R, as well as aluminum alloy 7A04, relevant parameters were fitted, and the theoretical model for life prediction was solved. Both numerical calculations and experimental results show that under an initial load of 37 kN, the attenuation value of the locking force after 15 years of service at room temperature is less than 10%. The remaining locking force still meets the safety service requirements, and no decoupling phenomenon was observed.
In conclusion, the theoretical model for life prediction established in this paper can effectively evaluate the long-term service performance of the docking lock, providing theoretical and experimental support for its safe application in the space station. The research results offer significant reference value for the design optimization and life assessment of the space station docking mechanism.
Data availability
The datasets generated and analyzed during the current study are not publicly available due to signing a confidentiality agreement with Party A, but are available from the corresponding author on reasonable request.
References
Musgrave, G. E., Larsen, A. & Sgobba, T. Safety Design for Space Systems (Butterworth-Heinemann, 2009).
Yang, Y. et al. Stress-relaxation ageing behavior and microstructural evolution under varying initial stresses in an Al–Cu alloy: Experiments and modeling. Int. J. Plast. 127, 102646 (2020).
Bi, J., Cui, X., Zhang, Y., Zhang, Z. & Wu, X. Study on stress relaxation behavior of Ti-6Al-4V titanium alloy sheet. J. Mech. Eng. 55, 43–52 (2019).
Li, G., Gong, J., Tan, J., Zhu, D. & Jia, W. Stress relaxation behavior and life prediction of gasket materials used in proton exchange membrane fuel cells. J. Cent. South. Univ. 26, 623–631 (2019).
Peng, H. et al. Effect of temperature and cyclic loading on stress relaxation behavior of Ti–6Al–4V titanium alloy. Mater. Sci. Engineering: A. 824, 141789 (2021).
Nong, X., Feng, W., Gao, J., Shi, C. & Zhao, N. Stress relaxation constitutive relations and finite element analysis of T9a helical compression spring. Mater. Trans. 62, 962–967 (2021).
Shi, D., Zhang, Y., Sui, T. & Yang, X. Creep analysis of single crystal turbine blade under typical mission cycle. J. Aerosp. Power. 39, 6–14 (2024).
Zhang, L. & Bi, L. Selection of bolt and flange materials with considering high temperature creep. Lubr. Eng. 46, 68–74 (2021).
Wang, H. et al. Creep failure mechanism of < 111>-oriented thin-wall Ni3Al-based single crystal superalloys. Mater. Sci. Eng. A. 899, 146415 (2024).
Hu, Z. Study on the creep-fatigue crack propagation mechanism of steam turbine blades (Xi’an: Xi’an University of Technology,, 2021).
Khalafi, M., Sameezadeh, M. & Temperature-Gradient On 2024 aluminum alloy: A novel approach to creep failure evaluation aided by image processing. Eng. Fail. Anal. 162, 108406 (2024).
Li, Y. et al. Accelerated degradation testing for lifetime analysis considering random effects and the influence of stress and measurement errors. Reliab. Eng. Syst. Saf. 247, 110101 (2024).
Chen, W., Li, X. & Kang, R. Integration for degradation analysis with Multi-Source Adt datasets considering dataset discrepancies and epistemic uncertainties. Reliab. Eng. Syst. Saf. 222, 108430 (2022).
Li, X., Wu, J., Ma, H., Li, X. & Kang, R. A random fuzzy accelerated degradation model and statistical analysis. Ieee Trans. Fuzzy Syst. 26, 1638–1650 (2018).
Shat, H. & Rainer, S. Optimal stress levels in accelerated degradation testing for various degradation models. Cham, :113–134. (2022).
Wang, K., Shi, J. & Jin, P. Experimental analysis and application of stress relaxation characteristics of helical compression spring. Chin. J. Appl. Mech. 38, 158–165 (2021).
Jiang, D., Chen, T., Xie, J., Cui, W. & Song, B. A. Mechanical system reliability degradation analysis and remaining life Estimation Method——with the example of an aircraft hatch lock mechanism. Reliab. Eng. Syst. Saf. 230, 108922 (2023).
Zhang, C., Pan, L., Wang, S., Wang, X. & Tomovic, M. An accelerated life test model for solid lubricated bearings used in space based on Time-Varying dependence analysis of different failure modes. Acta Astronaut. 152, 352–359 (2018).
Long, Z. et al. Life prediction of Tmr current sensor under accelerated degradation test. J. Phys. Conf. Ser. 2625, 12052 (2023).
Zhang, Y., Jia, X. & Guo, B. Bayesian framework for satellite rechargeable Lithium battery synthesizing bivariate degradation and lifetime data. J. Cent. South. Univ. 25, 418–431 (2018).
Liu, H. Advanced Materials Mechanics 259–290 (Higher Education Press, 1985).
Su, D. Spring (material) Stress Relaxation Mechanism and its Applications 310–386 (Tianjin University, 2002).
Wang, T. Stress Relaxation Behavior of the Spring Steel (Southwest Jiaotong University,, 2012).
Song, H., Gao, H., Zhang, Q., Zhou, X. & Zhang, B. Long-Term stress relaxation behaviors and mechanisms of 2219 Al–Cu alloy under various temperatures and initial stresses. J. Mater. Sci. Technol. 180, 174–192 (2024).
Buha, J., Lumley, R. N. & Crosky, A. G. Secondary ageing in an aluminium alloy 7050. Mater. Sci. Eng. A. 492, 1–10 (2008).
Bheemreddy, V., Bill Liu, J. J., Wills, A. & Murcia, C. P. Life prediction model development for flexible photovoltaic modules using accelerated damp heat testing. 1249–1251 (2018).
Dutt, K. A., Joshi, S. J., Shah, D. B., Soni, S. B. & Prajapati, D. Experimental investigation of fatigue for one way power transmission clutches using accelerated life tests. Results Eng. 22, 102136 (2024).
Zhou, X. et al. Insulation for rotating low-voltage electrical machines: Degradation, lifetime modeling, and accelerated aging tests. Energies 17, (2024).
Acknowledgements
This research was supported by the National Natural Science Foundation of China (No. 51775477). The support is gratefully acknowledged.
Author information
Authors and Affiliations
Contributions
All authors contributed to the study conception and design. L.Q. provided the concept and edited the draft of the manuscript. J.G. conducted the data analysis and wrote the initial draft of the manuscript. C.G. was responsible for supervision and validation. H.Y. made a great contribution to the experimental work of this paper.
Corresponding author
Ethics declarations
Competing interests
The authors declare no competing interests.
Additional information
Publisher’s note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution-NonCommercial-NoDerivatives 4.0 International License, which permits any non-commercial use, sharing, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if you modified the licensed material. You do not have permission under this licence to share adapted material derived from this article or parts of it. The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by-nc-nd/4.0/.
About this article

Cite this article
Quan, L., Gao, J., Guo, C. et al. Theoretical and experimental research on long life prediction of the locking system of the space station docking mechanism. Sci Rep 15, 13710 (2025). https://doi.org/10.1038/s41598-025-98784-5
Received:
Accepted:
Published:
Version of record:
DOI: https://doi.org/10.1038/s41598-025-98784-5
