
Abstract
After large-scale backfilling, understanding and controlling the collapse behavior of the roof and surrounding rock remain critical challenges in underground metal mining. Based on field investigations, an arch thickness formula for the collapsed pressure arch was derived. Laboratory-scale similarity experiments were conducted to study the collapse mechanisms following goaf failure, with particular focus on the dynamic impact characteristics and spatial influence range of roof and surrounding rock failure. The discrete element method was employed to analyze the dynamic failure process and stability evolution, leading to the design of an in-situ grouting reinforcement scheme. The results demonstrate that the newly developed grouting mold and method enhance both the efficiency and accuracy of similarity simulations. The failure patterns observed in the physical tests adequately represent the collapse characteristics of roof and surrounding rock under complex engineering conditions. The 3DEC simulation results show good agreement with the similar simulation experiments, both revealing a U-shaped collapse zone and similar displacement distribution characteristics, with the maximum displacement occurring at the roof. Under vertical load, the goaf collapsed instantly, showing prominent collapse impact characteristics; the slurry reinforcement method was consistent with the field application effect. It verifies the feasibility of the comprehensive method in studying roof and surrounding rock control methods after gob collapse in a large-scale backfill environment.
Similar content being viewed by others
Introduction
Underground goafs are common in mining projects. They are temporary or permanent underground spaces formed for ore mining. The roof and the two gangs of the goaf are susceptible to pressure changes and redistribution caused by the sudden collapse of the overburden. Unstable underground goaf may damage the stability of the surrounding diverticulum and cause instability, which not only causes enormous economic losses but also causes serious harm to personnel1,2. Compared with the instability damage caused by excavating intact rock masses, the goafs of the gangs, which are filled with complex materials, are more likely to collapse. Although the engineer will the mining sequence in the early stage of the excavation, in the mining environment, if the pillar is not enough to balance the external force and prevent the loosening and deformation of the two-package, the roof is likely to collapse. In addition, the control of the stability of the two-pack backfill plays an essential role in the mining, especially for larger underground goafs, improper mining design will directly lead to the collapse of the roof. The primary purpose of this study was to discover and evaluate the stability of the roof and the two gangs in the goaf to understand each stop’s mining sequence fully.
In recent years, through field investigations and qualitative observations, extensive research has been carried out on the failure and characteristics of underground goafs. For example, Wang et al.3 reveals the formation of mine surface collapse and the role of two critical boundaries and proposes a backfill zone mining method to avoid surface collapse. In this case, through the on-site investigation, the thickness of the roof, the span, and some measures affecting the stability of the goaf were found. However, for the saw instability, there needs to be a more quantitative understanding of the collapse of the roof. Many researchers have tried to show prediction methods for goaf stability through various analytical methods4,5,6. Considering its practicability, it is widely used in empirical or semi-empirical methods. However, the accuracy and reliability of stability assessments are limited by the experience and judgment of engineers7.
On the other hand, iterative calculations and convergence problems in mathematical modelling are cumbersome for researchers8,9, although they have now become a routine approach. As for analytical methods, it is also feasible to calculate common practical problems through simple mechanical models by theories10,11. It has been widely used to solve some problems in rock mechanics analysis. For example, Sun et al.12 proposed a new analytical solution based on the critical layer theory and the mechanical analysis of the overlay layer - the analogy hyperbolic settlement model (AHSM) to describe the motion and damage inside the rock mass. Through theoretical analysis, Guo et al.13 established roof rupture and mechanical models, revealing the failure characteristics of the roof in the repeated mining face. Based on this, the ground pressure behavior and required roof support conditions were determined. The study in Ning et al.14 presents a method for determining the fractured zone height in short-distance coal seam group mining, based on a developed mechanical model.
Similarly, the researchers further verified the method’s feasibility by numerical simulation and similar simulation. For example, Yang et al.15 uses the finite difference method to build the global tunnel model (FDM), performs laboratory tests and field data calibration on the boundaries through the synthetic rock mass (SRM) method, and then uses the discrete method (DEM) to build discrete cracks. The local model of the network (DFN) analyzes the impact of primary lining repair on rock failure. In the study of Wang et al.16, the underground long-wall working face of a coal mine is selected as a numerical simulation model, and the measured blasting vibration wave is selected as the power source and loaded. FLAC3D can systematically simulate the influencing reasons. Chen et al.17 based on flac3d and on-site geological survey, the characteristics of the overburden layer and the stress distribution around the roadway and coal seam in thick coal seam mining and top coal caving are compared, and the influence of the two mining methods on rock burst prevention is analyzed. Using the UDEC numerical method, Li et al.18 examined how a footwall fault affects the movement of a specific iron ore body and revealed the associated deformation characteristics of the deep surrounding rock. Suarez et al.19 explores high-resolution simulation of rock particle fragmentation, aiming to address the cross-scale challenge from particle-level fracture to industrial system-level modeling. It experimentally calibrates finite element and discrete element models, and successfully applies the validated DEM model to predict system responses in industrial-scale cone crushers. The study in Ma et al.20,21 employed both similar material physical experiments and particle flow numerical simulation to examine the collapse characteristics of the overlying strata. Melville et al.22 proposed a method to watch the strain distribution in similar models of coal mining, which is used to analyze the characteristics of overlying strata movement in mines. In the study of Sun et al.23, the deformation of excavation tunnels in deep soft rock formations was studied by physical simulation experiments. The study in Celik and Ozcelik24 utilized a large-scale geotechnical model test to examine the deformation and failure characteristics of surrounding rock in a deep, thick coal seam roadway.
However, it must be noted that the research on the subject rarely considers the internal of the rock mass, and the three-dimensional break characteristics of the underground excavation rock mass can be well shown by the 3DEC software. For example, Wu et al.25 developed and validated a comprehensive hydraulic fracturing framework to manage the hard-hanging roof in longwall mining. Through a case study that integrated rock mechanics testing, 3DEC numerical simulation, and field monitoring, the framework successfully induced roof collapse and demonstrated its practical effectiveness. In studies by Mueller et al.26,27,28, a 3DEC-based discrete numerical approach was applied in three distinct contexts: to simulate the deformation and crack evolution of rock salt, to analyze mining-induced settlement due to backfilling, and to model the nonlinear anisotropic mechanical behavior of deep hard rock. These investigations collectively highlight the versatility of the method in tackling complex geomechanically problems challenges.
This study utilizes an underground metal mine stope as a research basis to investigate the stability of goaf areas under large-scale backfill support. Although combined methods such as physical similarity simulations and numerical analysis have proven effective for comprehensive goaf stability analysis29,30, previous research has paid limited attention to the specific influence of mine pressure in backfilled environments. Goafs are characterized by complex geometries, large exposed areas, uncertain exposure times, and potential severe instability, making them a major hazard in metal mining31. Moreover, existing studies seldom consider the impact of stope collapse on surrounding rock masses.
This study employs an integrated approach, encompassing field investigations, laboratory physical model tests, and three-dimensional numerical simulations, to investigate the collapse behavior and control of large-scale backfilled mine workings’ roof strata and surrounding rock. The physical model not only replicates the collapse process but also enables observation of associated shock wave propagation phenomena. Based on the comprehensive research findings, grouting reinforcement strategies tailored for engineering applications have been formulated. The methodology developed herein aims to provide a systematic framework for analyzing roof collapse mechanisms and evaluating reinforcement measures in complex mining environments.
Theoretical computational model
Geological and engineering background
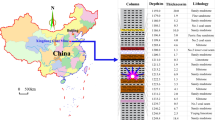
Figure 1(a) shows the geographical location map of the Fankou Mine. Figure 1(b) presents a cross-section of an underground metal mine using the backfill mining method. The model measures 104 meters in length, 40 meters in width, and 70 meters in height, with the red area representing the formed goaf. Due to the insufficient strength of the surrounding backfill (white area), it struggles to effectively support the overlying rock mass load, subsequently triggering large-scale collapse of both the backfill and the overlying ore body. The blue-numbered areas (1–5) within the figure represent mining rooms awaiting extraction. Investigating the impact patterns of goaf collapse on the stability of adjacent mining rooms and optimizing the mining sequence accordingly are critical prerequisites for achieving safe and efficient extraction of these five mining rooms.

Current status of mining in collapsed areas.
The initial pressure arch thickness formula is derived
In the surrounding rock, under complex conditions, the collapse of the roadway only occurs after the excavation is completed. That is, the destruction of the surrounding rock develops gradually. When the surrounding rock is in a specific equilibrium state, the pressure of the surrounding rock is borne by the pressure arch in the rock body at that moment. In the course of roadway excavation, considering that the rock mass still has a specific cohesive force, the load on the initial pressure arch is derived through the calculation method of the surrounding rock pressure of Terzaghi32. The calculation diagram is shown in Figure 2.

Implified diagram of load calculation for pressure arch.
The basic form of Terzaghi’s formula is presented by Equation 1:
Where: B is the width of the micro-element body and its overlying rock mass; γ is the gravity of the surrounding rock; c is the cohesion of the surrounding rock; λ is the lateral rock mass pressure coefficient; h is the overlying rock mass of the micro-element body Thickness; φ is the internal friction angle of the surrounding rock; P is the overburden.
let h = H, P = 0, the load p of the compression arch is obtained (Equation 2):
The bearing capacity of the initial pressure arch
The calculation formula for the bearing capacity of surrounding rock pressure arch is presented by Equation 333.:
Where: F is the bearing capacity of the arch part of the roadway; S is the area of the arch part of the roadway; γ is the gravity of the surrounding rock. In order to ensure that the arch can withstand the load within the collapsed range of the fracture surface, the intersection of the upper boundary of the pressure arch and the fracture surface should be flush with or above the level of the vault, namely (Equation 4):
Where: R1Sinβ=y1; tanβ=x1/y1; where R1 is the distance from the center of the roadway to the contour of the roadway, x1 is 1/2 of the roadway span; y1 is 1/2 of the roadway height, and β is the distance between R1 and the horizontal line The included angle, Y=2y1.
Therefore, the area S enclosed by the pressure arch of the surrounding rock and the horizontal line of the dome can be calculated as follows (Equation 5):
In addition, from the geometric relationship, the width B of the overlying rock mass of the pressure arch and the thickness H0 of the pressure arch satisfy the relationship (Equation 6):
Determination of arch thickness for initial pressure
According to the initial pressure arch’s bearing capacity and the bearing load are equal, the vertical balance equation is established, then:
Substituting equation (2)-(6) into equation (7), the calculation formula for the thickness of the surrounding rock pressure arch H0 can be obtained34:
Deduction of arch thickness formula for collapse pressure
The collapse arch height D of the roadway is introduced to characterize the progressive failure of the surrounding rock. The thickness H1 of the collapse pressure arch is used to reflect the outward expansion of the pressure arch, and it is assumed after the roadway collapses. The lower boundary is an arc formed by the boundary point at the highest position of the empty surface of the tunnel collapse, which is consistent with the curvature of the vault, as shown in Figure 3.

The position of the pressure arch in the collapse state of the roadway.
The roadway forms a collapse with a height of D, and the lower boundary of the pressure arch is empty at the collapsed part, equivalent to increasing D based on the initial inner contour radius R1 and reducing D based on the initial buried depth of the roadway. Assumption (Equation 9-10):
From the intersection of the upper boundary of the pressure arch, the level of the vault should be flush with the level of the vault or above the level. It can be known that the collapse height D of the roadway should satisfy the following relationship:
Use R’ instead of R1, and use H’ instead of H, and substitute it into equation 12, then the calculation formula for the thickness H1 of the arch of the collapse pressure can be obtained:
Physical model test
Addressing the gap in existing literature regarding the instability mechanisms of large-scale mining areas under backfilling conditions, this study constructs a physical simulation model based on detailed field investigations to investigate the instability process triggered by the collapse of mined-out areas.
Experimental design
Difficulties and problems that may be faced in the experiment: How to achieve group ore and filling body (here, the similar mortar of ore and filling body) during the model making, and ensure the grouping is neat and does not bend, because The weight of the mortar is considerable and the flow is slow, and it is hard to control the group grouting, and it is labor-intensive and labor-intensive. Because mortar has fluid-like properties and the weight is high, the success rate of making a grouping model is low, which leads to the failure of the entire scientific research experiment.
(1) Identify the types of materials required for similar simulation experiments
According to the nature of the goaf and the internal stope, barite, sand, cement, and gypsum are selected as the proportioning materials, of which cement and gypsum are used as cementing materials.
(2) Calculate the ratio of each material
In order to make the intensity of the simulated material of the goaf and the internal stop closer to the actual value, according to the density of the proportioning material, as shown in Table 1 and Table 2, the density ratio of the goaf to the internal stop is determined to be 1:2, and the density similarity coefficient is 1. At the same time, the proportion of water consumption is calculated according to the size of the simulated material mass of 10%.
(3) Purchase materials
According to the material ratio, sand with a particle size of 0.2–0.4.2.4 mm and barite with a particle diameter of 0.3–0.5.3.5 mm are selected, and the particle diameters of other materials are neglected.
(4) Making pretest pieces
According to the total material ratio, the part is reduced in proportion. Specific material size is mixed according to the mixing method of the main test piece, and the goaf and the internal stop are simulated. After solidification, see the experimental specimen and estimate the distribution. Compared with the accuracy of the material, if the accuracy is not high, adjust the proportion of each material to make it closer to the actual value.
(5) Making grouting mold
The grouting mold consists of three parts: the main body of the mold, ten mold sheets, and four thin rods.
Mold main body, as shown in Figure 4: inner diameter boundary, length 120 cm, width 16 cm, height 90 cm, two hollow cylindrical holes are respectively opened on both sides of the grouting mold, and the centers of the two cylindrical holes are respectively at the midpoints of the two bisectors on the side, The radius of the cylinder is 0.5 mm. Vertical lines are drawn on the outer front surface and the ore and backfill boundaries in each group.

Template for grouting.
Mold sheet: length 16 cm, width 1 cm, height 100 cm; thin rod, as shown in figure 5: cross-section radius is 0.5mm; the working part of the rod is 110cm.

Schematic diagram of the thin tie rod (A: Thread segment: Nut; C: Force plate; D: Cylindrical segment: Hook grip segment).
(6) Separate materials for goafs and internal stopes
According to the predesigned material ratio, the mixed materials are separately prepared. Because of the relatively large particle size of barite and sand, the barite and sand should be added first, mixed evenly, mixed with cement and gypsum, and finally mixed with water.
(7) Filling the slurry and making the test piece
Thin wooden plates are used to partition the interior of the mold into multiple sections serving two key functions. One is to ensure uniform stress distribution on the mold during grouting, thereby minimizing mold deformation. The other is to maintain the volumetric integrity and positional accuracy when grouting sections of slurry with different properties. Prior to grouting, the mold interior is partitioned into 11 sections. Each section is separated by a thin wooden plate, with the placement positions of the plates marked by dividing lines of a color distinct from that of the mold at corresponding locations. To secure the position of each thin wooden plate and enhance its stability with the bottom of the mold base, a small groove is formed at each dividing line on the mold bottom. Each groove has a bottom area of 0.5 square millimeters and a depth equal to the thickness of the thin wooden plate. Subsequently, each thin wooden plate is inserted into the mold along the premarked dividing lines.
Two thin rods are inserted from opposite sides of the mold, each passing through the first thin wood board on its respective side. Grouting is performed simultaneously from both sides in a symmetrical process; one side will be described as an example. A force plate and nut are installed on the two thin rods at the position of the first board and tightened. This allows the first cavity to be filled with the desired slurry, while the rods remain stationary. Once the first set is filled, the grouting for the second set begins and continues until the slurry reaches the lower force plate. This setup facilitates the removal of the fixed nuts and force plates. Simultaneously, the mutual restraint between the left and right slurry bodies prevents the previously placed slurry from shifting towards the weaker side. After removing the lower force plate and the fixing nut from the first thin wood board, the lower thin rod is pushed forward to the position of the second thin board. The threaded section of the rod is extended beyond the board to allow for fixation with the nut and force plate. Grouting of the second set then continues until the mold is half full. Subsequently, the upper thin rod is moved to the second thin board, with its threaded section also extended beyond the board and fixed. Grouting for the second set is then completed, filling the cavity entirely. This concludes one full cycle.
This process is performed simultaneously on both sides until the final middle section is grouted to a level below the lower pressure plate of the thin wooden plate. The nuts of the lower thin rods and the lower pressure plates are then unscrewed, and the components are returned to their original lower positions. Pull the rods and continue grouting up to the upper side of the thin wooden plates before unscrewing the nuts of the upper thin rods and the upper pressure plates. Return the upper thin rods along their original paths, extract all wooden plates, and proceed with grouting. During the grouting of each section, constant attention must be paid to the slurry height—measured internally with a tape measure—and the alignment between the ore and the filling line to ensure consistency with the slurry.
(8) After the model has hardened (about one and a half days), remove the mold.
Adjust the upper pressurization point of the similar experimental instrument to the upper part of the model, and install the test instrument at a certain distance to tell the camera to record the pressurization. At the same time, place two blasting barometers at the same position on both sides of the lower roadway from the center point and record it in the pressurization. During the, the force and displacement changes on both sides of the goaf due to the deformation and breakage.
Result analysis
A similar simulation experiment got the model before and after excavation, as shown in Figure 6. After forming the goaf in a similar model, the roof plate collapses instantaneously, and the strain gauges are used to compare the deformation state of the rock mass at the critical points before and after mining. After the goaf was formed, the rock mass above the goaf began to deform. Since the goaf is large and the two gangs are filled, the vertical stress produces a tangential component at the top plate, which acts on the top plate along the normal direction. The middle part of the top plate also produces a significant bending moment, and the roof is an ore layer. The tensile strength of the body is relatively large, and the deformation exceeds the ultimate tensile strength of the roof rock mass. Therefore, in a similar simulation test, the roof and surrounding rock collapse instantaneously.

Similar simulation model before collapse (Strain gauges: SG11~SG16, SG21~SG25; Blasting vibration test instrument: bvt1&bvt2; Test probe: tp1~tp2).
A similar simulation experiment obtained the damage model, as shown in Figure 7(a, b). The top plate first collapsed. After the collapse, the integrity of the roof is still considerable. It is sudden and transient when it falls, and it has an enormous impact on the floor of the goaf. Subsequently, the two gangs also collapsed and squeezed toward the center of the goaf. At this time, there was still ample free space in the goaf, providing space for the breakage and collapse of the upper ore. When the goaf collapses to a stable state, the collapse of the final working face reaches 72 m. Combined with the results of the strain gauge monitoring (shown in Figure 7(b)), it can be concluded that the shape of the collapsed area is U-shaped and within the area. The five exits have different degrees of sinking.

Similar simulation model after collapse.
Through the analysis of impact crystallization, it can be found that when the top plate and the two sets of falling blocks move down to the floor of the goaf, they will be sent mainly in the form of vibration waves after being converted into kinetic energy (figure 7(c)). Figure 7(d) shows the displacement variation curves of Monitoring Point 1 and Monitoring Point 2, where the purple curve corresponds to Monitoring Point 1 and the green curve corresponds to Monitoring Point 2. Since the energy of the vibration wave continuously attenuates as the propagation distance increases, this study focuses on analyzing the response characteristics of these two measurement points: we deployed two blasting vibration meter sensors outside the similar model, at the position simulating the mine roadway; when the vibration wave propagates to this area, the sensors will capture the vibration signals and feedback the data, and the maximum vibration velocity of the corresponding measurement point will be directly displayed on the vibration meter terminal. According to the monitoring results, the damage degree of the stope area on the west side is relatively significant, with the vibration velocity reaching 8.1 cm/s in this area; the vibration velocity in the east area is 5.2 cm/s, while the rock medium at this position has stronger absorption and scattering effects on vibration energy, which also makes the fluctuation change of the vibration velocity in this section of the curve in the figure more intuitive and obvious.
Numerical simulation
The 3DEC software was used to build a numerical calculation model with a stope above and a large-scale filling body below. The essential mechanical boundaries of the ore body and the Mohr-Coulomb model obtained from the indoor test were used to calculate and analyze the roof, surrounding rock, and contact surface, and the collapse law of the roof and surrounding rock was analyzed.
Establishment of the computational model
The model is built according to the actual buried depth of the mine at the current stage. The top elevation is −280m, the bottom elevation is −80m, the model height is 200 m, the length is 184 m, and the width is 40m. The mining method is carried out by step-by-step filling method. The height of each stage is 45 m, and the width of the ore body is 8m. Therefore, the height of the goafs in the model is also set to 20 m, the top of the goaf is −210m, the height of the floor is −230m, and the width of the gob is 8 m, length 35m. The physical and mechanical boundaries of natural rock are shown in Table 3, and the essential mechanical boundaries of rock joints are shown in Table 4. The Mohr-Coulomb elastic-plastic model was selected as the constitutive model for both rock mass and backfill soil. This choice is based on the Mohr-Coulomb criterion’s widely recognized effectiveness in simulating the shear failure behavior of geomaterials, which is the primary failure mode anticipated in large-scale sliding collapses within mining areas35. Sliding constraints are applied around the model. The early stress environment of the model is formed by combining the direct stress and the self-weight load (see Figure 8).

3DEC numerical models.
Computational results
The variation law of stress-strain of the surrounding rock of the model is obtained. The software’s built-in commands extract the displacement, velocity, and shear strain increment clouds (see Figure 9).

Results of numerical simulation.
Displacement analysis
According to the simulation results, the maximum displacement position is the top plate, and the amount of subsidence is increasing. As the distance from the center of the goaf is farther, the maximum displacement of the roof of the goaf is gradually reduced. The variation is nonlinear from Figure 9 (a). Analysis shows that due to the existence of the structural plane, the five stopes have produced an extensive range of slippage, resulting in the instability of the goaf. It is found from Figure 9 (b, e) that the instability of the goaf is abrupt. That is, it is abruptly changed from a stable zone to a collapse zone at a certain point, and the range of the slip zone is significant. When the two gangs move quickly toward the center of the goaf, it means collapse. The filling body cannot remain stable, and the rock mass will slide along the crack surface toward the free surface. When the strength of the crack continues to decrease, the top plate will then fall, eventually forming a U-shaped collapsed area, which is obtained with a similar model. The results are consistent.
Speed curve analysis
When the goaf is formed (shown in Figure 9(c)), several air fronts will be created, namely the two layers of the surrounding rock and the roof of the goaf. Because of the cutting effect of the plane, the rock mass is cut into polyhedrons of various shapes, slipping and then collapsing on the empty surface. The constant change of the velocity field makes it possible for the entire goaf to collapse. Therefore, the change in the velocity field also affects the stability of the goaf.
Shear strain increment analysis
It is found from Figure 9(d) that the shear strain increment is most sensitive to the influence of slip, and there is also a mutation36,37, which will be abruptly changed from a stable zone to a slump zone at a certain point, and the slip zone is increasing. When the shear strain increment is maximum, the goaf is about to collapse. Due to the specific strength of the rock mass crack, the apparent slip zone formed lags behind the goaf, but it can still maintain an instantaneous steady state. As the two gangs begin to slide along the fracture surface toward the free surface, the upper roof falls when the rock mass is cracked, and the strength decreases.
Application: a real case engineering
By analyzing the collapse law of the roof and the two gangs, combined with the conditions of the mine site, the surrounding rock reinforcement control scheme in the design area is designed and compared with the effect on the site to verify the reliability of the surrounding rock control scheme after the collapse of the goaf.
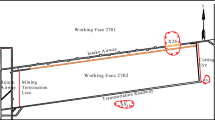
Figure 10 shows the position of the slip line and the collapse range determined by the two experimental results (the magenta dashed line in Figure 10). The shape of the slip line is roughly U-shaped, and the area below the slip line can be determined as stable. There are different degrees of damage above the area, which is the area that needs to be reinforced, and the targeted grouting reinforcement treatment is made. The roadway is drilled in the stable area of the surrounding rock mass (one on the east and west sides), the grouting holes are arranged in the goaf, and the ZK1 to ZK6 grouting holes are designed. Figure 10 is the on-site drilling detection and grouting diagram. The method of edge detection and edge grouting is used38,39.

Grouting reinforcement treatment.
On the one hand, the position of the slip line is judged according to the detection hole. If the change occurs, the grouting range is adjusted. At the grouting reinforcement treatment, the primary purpose is to control the area above the slip line and around the goaf. The on-site inspection is available. The position of the slip line is consistent with the similar test and numerical simulation. Through the grouting reinforcement treatment, the quality of the surrounding rock in the collapsed area is improved, and the mining environment is improved. The safe mining of the five exits laid the foundation.
Conclusion
This study enables precise identification and control of potential hazards within subsidence zones, thereby enhancing mining safety. It also establishes an integrated methodology for stability assessment and control in backfilled goafs, which can provide practical guidance for safe mining under similar geological conditions. From an engineering standpoint, the derived arch thickness formula offers a theoretical tool for preliminary stability evaluation of goafs. The proposed similar simulation method presents a cost-effective means of visualizing collapse processes and failure mechanisms. The 3DEC numerical model acts as a predictive tool for identifying high-risk zones and assessing instability progression. Furthermore, the grouting reinforcement strategy, validated through field application, demonstrates considerable potential for widespread use in metal mines with large-scale backfill, contributing to both safety improvement and cost efficiency. The conclusions are as follows:
-
1)
Based on a simplified mechanical analysis, a formula for the thickness of the collapse pressure arch in surrounding rock was derived. This formula quantitatively describes the arching effect and its evolution during the progressive failure of a goaf, providing a theoretical basis for understanding the "pressure arch evolution – slip instability – U-shaped collapse" mechanical mechanism in filled environments.
-
2)
Physical similarity simulation experiments demonstrate that following the instability of a filled goaf, the roof and surrounding rock undergo rapid sliding-dominated collapse, ultimately forming a clearly defined U-shaped collapse zone (≈72 m). Strain monitoring confirmed differential subsidence at five exits, consistent with the observed failure pattern and collapse process. These results closely match subsequent numerical simulations, validating the reliability of the similarity simulation method for revealing failure mechanisms in complex backfilled environments.
-
3)
The 3DEC simulation results closely match those from the physical model, both revealing a U-shaped collapse zone. Key quantitative consistencies include: maximum displacement concentrated in the roof area, and vibration velocity attenuation phenomena, such as 8.1 cm/s on the west side and 5.2 cm/s on the east side. The grouting reinforcement plan formulated based on these findings proved effective in field applications after implementation through designed drilling. This integrated approach, from mechanism identification to engineering intervention, provides a feasible and economical solution for stabilizing backfilled mine subsidence areas.
This study provides a systematic pathway from mechanism elucidation and methodological innovation to engineering practice for analyzing and controlling the stability of goaf areas in large-scale backfilling environments: the derived pressure arch thickness formula serves as a theoretical basis for rapid stability assessment; the developed “physical-numerical” cross-verification method accurately simulates collapse processes and predicts affected ranges; The proposed in-situ grouting reinforcement scheme has been validated as effective through field testing, forming a complete “mechanism-prediction-control” technical system with clear guidance for safe mining operations in similar mines. However, as this study is based on specific geological and mining conditions, the applicability of the derived principles under more complex strata and multi-field coupling effects requires further verification. Future research should focus on rock mass responses under different lithological combinations, long-term rheological effects, and dynamic disturbances. Additionally, exploring intelligent early warning and adaptive control methods based on real-time monitoring will enhance the proactivity and reliability of disaster prevention and control.
Data availability
The datasets used and/or analyzed during the current study available from the corresponding author on reason able request.
References
Wu, Y., Hu, J., Xie, C. & Shi, D. Case study on the stability control of broken surrounding rock in roadway excavation on the edge of a collapsed stope area. Adv. Civ. Eng. 2021, 8658847 (2021).
Xie, C., Cao, J. & Shi, D. A three-dimensional nonlinear dynamic numerical optimization of the risks of stope blasting based on FOA-GRNN. Shock Vib. 2021, 9981078 (2021).
Wang, F., Jiang, B., Chen, S. & Ren, M. Surface collapse control under thick unconsolidated layers by backfilling strip mining in coal mines. Int. J. Rock Mech. Min. Sci. 113, 268–277 (2019).
Jiang, L., Yang, C. & Jiao, H. Ultimately exposed roof area prediction of bauxite deposit goaf based on macro joint damage. Int. J. Min. Sci. Technol. 30, 699–704 (2020).
Huang, F. et al. Stability analysis of tunnel under coal seam goaf: Numerical and physical modeling. Undergr. Space 11, 246–261 (2023).
Li, N. et al. Underground mine truck travel time prediction based on stacking integrated learning. Eng. Appl. Artif. Intell. 120, 105873 (2023).
Chen, J. et al. Current status and outlook of roadbed slope stability research: study based on knowledge mapping bibliometric network analysis. Sustainability 17, 4176 (2025).
Walton, G. & Sinha, S. Challenges associated with numerical back analysis in rock mechanics. J. Rock Mech. Geotech. Eng. 14, 2058–2071 (2022).
Gao, W., Ge, S. & Hu, C. Fracture behaviors of columnar jointed rock mass using interface mechanics theorem. J. Rock Mech. Geotech. Eng. 15, 2877–2891 (2023).
Ma, H., Chen, L., Tan, X., Qian, J. & Lu, Z. Theoretical dynamic displacement analysis for rock bolt with surrounding rock-soil body. Int. J. Rock Mech. Min. Sci. 141, 104698 (2021).
Wang, L. & Lei, Q. Modelling the pre- and post-failure behaviour of faulted rock slopes based on the particle finite element method with a damage mechanics model. Comput. Geotech. 153, 105057 (2023).
Sun, Y., Zuo, J., Karakus, M. & Wang, J. Investigation of movement and damage of integral overburden during shallow coal seam mining. Int. J. Rock Mech. Min. Sci. 117, 63–75 (2019).
Guo, W., Yang, W., Ge, Z., Wang, B. & Li, L. Investigation on overburden failure and subsurface subsidence characteristics in fully mechanized top-coal caving of ‘Three-Soft’ Thick coal seams. Sci. Rep. 15, 24833 (2025).
Ning, J., Wang, J., Tan, Y. & Xu, Q. Mechanical mechanism of overlying strata breaking and development of fractured zone during close-distance coal seam group mining. Int. J. Min. Sci. Technol. 30, 207–215 (2020).
Yang, Z.-M., Wu, S.-C., Gao, Y.-T., Jin, A.-B. & Cong, Z.-J. Time and technique of rehabilitation for large deformation of tunnels in jointed rock masses based on FDM and DEM numerical modeling. Tunn. Undergr. Space Technol. 81, 669–681 (2018).
Wang, L. et al. Numerical simulation on failure effect of mining-induced dynamic loading and its influential factors. Saf. Sci. 113, 372–381 (2019).
Chen, Y. et al. Comparative study on blasting simulation vibration reduction and field vibration reduction experiment of adjacent oil pipeline. Front. Earth Sci. 12, 1489468 (2025).
Li, Y., Zhang, J., Zuo, C. & Duan, K. Borehole breakout in heterogeneous rocks using improved Voronoi model: Laboratory test and discrete element modeling. J. Rock Mech. Geotech. Eng. https://doi.org/10.1016/j.jrmge.2025.06.010 (2025).
Suarez, L. et al. Multiscale modeling of rock fracture in comminution — A comparative study of FEM accuracy and DEM scalability. Minerals Eng. 232, 109488 (2025).
Ma, Q. et al. Progressive failure processes and mechanisms of disasters caused by interrelated failure of residual coal pillars and rock strata. Sci Total Environ. 954, 176181 (2024).
Chen, G. et al. Experimental Investigation on the Influence of dip angle and layer thickness of overlying rock layers on the failure process of bedding slopes. Rock Mech. Rock Eng. 58, 8195–8220 (2025).
Melville, M., Mondal, S., Nehring, M. & Chen, Z. Optimization of a coal mine roof characterization model using machine learning. Int J. Rock Mech. Min. Sci. 181, 105835 (2024).
Sun, N. et al. The deformation law of a soft-rock cavern by step excavation in a pumped storage power station. Appl. Sci. 13, 8970 (2023).
Celik, A. & Ozcelik, Y. Investigation of the efficiency of longwall top coal caving method applied by forming a face in horizontal thickness of the seam in steeply inclined thick coal seams by using a physical model. Int. J. Rock Mech. Min. Sci. 148, 104917 (2021).
Wu, X. et al. A robust framework of hydraulic fracturing applications for competent roof caving in underground longwall operations. Front Earth Sci. 13, 1594895 (2025).
Mueller, C., Fruehwirt, T., Haase, D., Schlegel, R. & Konietzky, H. Modeling deformation and damage of rock salt using the discrete element method. Int. J. Rock Mech. Min. Sci. 103, 230–241 (2018).
Corkum, A. G., Lorig, L. J. & Varun, V. Rock mass permeability evolution during triaxial shearing based on three-dimensional distinct element model (3DEC) simulation. Comput. Geotech. 168, 106150 (2024).
Zhao, K. & Wong, L. N. Y. Creep-fatigue interaction of rock salt using discrete element simulation. Comput. Geotech. 176, 106771 (2024).
Li, P., Lai, X., Gong, P., Su, C. & Suo, Y. Mechanisms and applications of pressure relief by roof cutting of a deep-buried roadway near goafs. Energies 13, 5732 (2020).
Wang, H. et al. Deformation characteristics and stress evolution law of composite hard roof under presplitting weakening. Mining Metall. Explor. 40, 839–850 (2023).
Steinberg, V. Elastic turbulence: an experimental view on inertialess random flow. In (eds Moin, P. & Stone, H. A.) 53 27–58 (Annual Reviews, Palo Alto, 2021).
Baghbani, A., Choudhury, T., Costa, S. & Reiner, J. Application of artificial intelligence in geotechnical engineering: a state-of-the-art review. Earth-Sci. Rev. 228, 103991 (2022).
Xie, H. et al. Study on the mechanical properties and mechanical response of coal mining at 1000m or deeper. Rock Mech. Rock Eng. 52, 1475–1490 (2019).
Chen, D., Tang, J., He, W., Gao, C. & Zhang, Z. Influence of seam spacing and lateral pressure on deviatoric loading of the withdrawal roadway surrounding rock under the goaf. Sci. Rep. 15, 33282 (2025).
Xie, C., Chen, Z., Xiong, G., Yang, B. & Shen, J. Study on the evolutionary mechanisms driving deformation damage of dry tailing stack earth-rock dam under short-term extreme rainfall conditions. Nat. Hazards 119, 1913–1939 (2023).
Liao, J., Li, X., Chen, J. & Lu, Y. Dynamic bond-slip model for FRP-concrete interface under in-plane shear loads. Constr. Build. Mater. 469, 140430 (2025).
Wang, D. et al. Intelligent identification of coal fractures using an improved U-shaped network. Adv. Geo-Energy Res. 15, 129–142 (2025).
Xie, C., Jia, N. & He, L. Study on the instability mechanism and grouting reinforcement repair of large-scale underground stopes. Adv. Civ. Eng. 2020, 8832012 (2020).
Chengyu, X., Weihang, L., Ziwei, C. & Yabin, W. Study on the infrared dynamic evolution characteristics of different joint inclination phyllite under uniaxial compression. Sci. Rep. 13, 9867 (2023).
Funding
This research was funded by the Excellent Youth Project of Hunan Provincial Department of Education (No. 22B0164).
Author information
Authors and Affiliations
Contributions
Ruichong Zhang: editing, supervision, funding acquisition. Chengyu Xie: experiment, methodology, data curation, writing—original draft. Jiaozhong Chen: writing—review and editing, data collection, image processing.
Corresponding author
Ethics declarations
Competing interests
The authors declare no competing interests.
Additional information
Publisher’s note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution-NonCommercial-NoDerivatives 4.0 International License, which permits any non-commercial use, sharing, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if you modified the licensed material. You do not have permission under this licence to share adapted material derived from this article or parts of it. The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by-nc-nd/4.0/.
About this article

Cite this article
Zhang, R., Xie, C. & Chen, J. Using physical model test and numerical simulation for revealing the mechanism of stope collapse: a case study. Sci Rep 16, 6596 (2026). https://doi.org/10.1038/s41598-026-37753-y
Received:
Accepted:
Published:
Version of record:
DOI: https://doi.org/10.1038/s41598-026-37753-y
