
Abstract
The Flow-induced Motion (FIM) of elastically-supported triangular prisms is experimentally investigated, with system comparisons conducted across generators of varying rated powers, to reveal the hydrokinetic energy conversion of disc-type generators. The incoming flow (U = 0.556 m/s-1.209 m/s) covers the Reynolds number range of 48,567 ≤ Re ≤ 105,606 in TrSL3. Variable load resistances RL (4 Ω ≤ RL≤31 Ω) are applied to change the total damping in the system, and the optimal damping is determined through power generation experiments. The oscillation responses and energy conversion of the system are analyzed, along with displacement time history and power spectrum of the oscillations. Through experimental studies, the disc-type generator exhibits better power generation performance compared to traditional rotational generators. The results contribute to a more comprehensive understanding on the flow-induced motion and energy conversion of the disc-type generators, and the main findings can be summed as: (1) The best branch for oscillation responses is defined as the galloping branch at a larger load resistance, the maximum amplitude ratio A*=1.72 is observed at RL=21 Ω with the generator rated at 300 W. (2) The energy conversion of the system varied with different generators, suggesting that there exists optimal damping for the generators. (3) The generator rated at 200 W has the best performance on energy harvesting in the tests. The maximum active power is Pmax=21.09 W at RL=11 Ω and Ur=8.1, corresponding to the efficiency of ηharn = 9.15%. The maximum energy conversion efficiency is 12.13% at RL=11 Ω and Ur=5.2, corresponding to the active power of Pharn=3.94 W.
Similar content being viewed by others

Introduction
The growing demand for renewable energy has intensified research into sustainable power extraction from fluid flows, particularly in low-velocity environments. Ocean currents represent a high-potential resource characterized by high energy density and predictability1,2,3, offering stability advantages over intermittent sources like wave and wind energy4. Given these attributes, ocean current energy has garnered significant global interest due to its vast reserves and development potential. Flow-induced motion (FIM) has become promising solution for exploiting these resources, leveraging phenomena such as vortex-induced vibration (VIV), galloping, and flutter to convert kinetic energy into electricity at velocities as low as 0.25 m/s5.
Critically, FIM-based systems demonstrate superior adaptability to low-velocity ocean currents, enabling efficient energy conversion in harvesting renewable energy. Energy conversion of FIM has emerged as a transformative approach for converting fluid energy into electricity, particularly in low-velocity fluids. To obtain higher energy, most researches on FIM energy harvesting focused on optimizing oscillator design and energy conversion mechanisms. The geometric design of cross-section is important for maximizing energy conversion efficiency by increasing oscillation amplitudes and broadening frequency bands6,7. Recent innovations have shifted from conventional circular cylinders to non-linear, hybrid, and adaptive cross-sections to exploit complex fluid-structure interactions, such as T-section prism8, Pentagon prism and Cir-Tria prism9, quasi-trapezoid cylinder10, and square cylinder11, D-shaped section cylinder12,13,14, C-shape cylinder15, solid and hollow bluff bodies16, triangular prism17,18. D-section prisms achieve 11.75% energy efficiency at 0° angle of attack, outperforming cylinders by > 40%. Angle variation (0°-180°) triggers transitions from VIV to galloping, eliminating amplitude self-limiting at high Reynolds numbers19. The passive turbulence control (PTC) using angled square rods was developed to trigger synergistic vortex-induced vibration (VIV)-galloping coupling, broadening operational velocity ranges while enhancing the hydrodynamic efficiency under optimized geometric configurations20. Analyses of tandem piezoelectric flags in upstream wakes and experimental studies on tandem C-shape cylinder wakes via pivoted flapping mechanisms have highlighted the complexity of flow-flag interactions21,22. Two T-section prisms in tandem arrangements exhibit “wake galloping” under downstream wake excitation23. Optimized spacing (L/D = 15) and load resistance (31 Ω) increase the amplitude ratio (A*) by 38%. The combined triangular prisms had been improved the effect on enhancing vorticity, boosting amplitude by 25% under low-stiffness conditions24, and the experimental investigation on the oscillators with different combined sections had been conducted to validate the advantages of non-linear cross-Sect25. The new type for FIM of flow-induced rotation was also developed26,27. Comparative studies of flow-induced motion energy conversion have consistently demonstrated the superior performance of triangular prisms over alternative cross-section. Experimental and numerical investigations confirm that triangular prisms uniquely sustain non-self-limiting galloping phenomenon at low velocity (0.25–1.3 m/s)28. Experimental investigation and numerical simulation on FIM responses and energy conversion on different types of cylinders had been conducted29,30, and all the results revealed that the triangular prism has the optimal performance on both FIM responses and energy conversion.
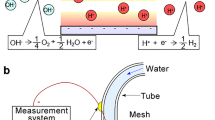
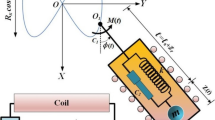
Ocean currents can generate electricity by driving impellers to rotate, converting ocean current energy into mechanical energy, and then the generator converts the mechanical energy into electrical energy. Therefore, the performance of the generator directly affects the quality and efficiency of the output electrical energy, as well as the performance and stability of FIMECS. Power Take-Off System (PTO) is the tool to convert the hydrokinetic energy to electronic energy; it mainly includes piezoelectric convertor and magnetoelectric convertor. The scholars preferred to conduct the investigations with the variable-excitation generator31 or the linear generator32, as shown in Fig. 1. However, the disc-type generators present a compelling solution due to the axial compactness, high torque density, and adaptability to oscillatory motion. Recent studies have explored the integration into FIM systems, revealing that electromagnetic damping significantly influences oscillation amplitude and energy conversion. Axial-flux permanent magnet (AFPM) designs minimize hydrodynamic drag in submerged systems, while disc-shaped TENGs harvest omnidirectional ultra-low-frequency vibrations (0.5 Hz), demonstrating the potential of rotary electromagnetic systems in FIM applications33. Magnetohydrodynamic (MHD) disc generators exemplify high-power applications, with argon plasma-driven systems yielding 10.3 kW output-ranking third globally for such technologies34. These advantages are tempered by challenges in impedance matching and damping control. Li et al. developed a hydrokinetic turbine-based triboelectric-electromagnetic hybrid generator that harnesses bidirectional ocean currents through planetary gear-mediated unidirectional rotation, achieving synergistic power outputs of 115 mW (TENG) and 350 mW (EMG) at ultralow frequencies35.

However, a critical challenge remains in efficiently coupling mechanical vibrations with electromagnetic generators, particularly in systems requiring compact and durable designs. The interaction among fluid-structure interaction, generator damping matching, and system damping requires further experimental validation to maximize energy conversion efficiency.
Based on the experimental investigations, this study aims to comprehensively evaluate the oscillation responses and energy conversion performance of the Flow-Induced Motion Energy Conversion System (FIMECS) with disc-type generators of different rated powers and various load resistances. The oscillations systematically cover the VIV, VIV-galloping transition, and fully developed galloping branches, revealing the influence of hydrodynamic responses on active power and energy conversion efficiency. Key operating conditions corresponding to the maximum displacement time history, peak active power, and highest conversion efficiency are identified, providing fundamental insights into the optimal matching between structural dynamics and electrical loading. The findings are expected to support the design and optimization of high-efficiency energy harvesters for practical marine applications.
Experimental methods
The FIMECS mainly consists of two parts: the oscillation system and the energy conversion system in a recirculating water channel31. The generators applied in the tests are introduced in this section. Moreover, the free decay tests of the FIMECS with different generators are conducted and analyzed to demonstrate the physical properties of the system. The incoming flow (U = 0.556 m/s-1.209 m/s) covers the Reynolds number range of 48,567 ≤ Re ≤ 105,606 in TrSL3 (Transition in Shear Layer, 20000 ≤ Re ≤ 200000).
Physical model
Oscillation system
The oscillation system on the water channel can be moved in the direction of the coming flow. Multiple parts can be observed in the oscillation system clearly, and the main frame is made of steel. A displacement sensor was attached to the frame vertically in the 1-m wide channel to record the displacement of the oscillation system, as well as a regular triangular with a side length of 0.12 m was introduced as the cross-section of the triangular prism. The variable frequency power pump was applied to change the flow velocity, as shown in Fig. 2.
During the installation of the linear guide ways, the vertical perpendicularity deviation shall be controlled within 0.02 mm/m, and the deviation parallel to the load-bearing structure shall not exceed 0.05 mm. It is crucial to ensure that the guide ways are perpendicular to the incoming flow direction (perpendicularity error ≤ 0.5°), so as to prevent the oscillator’s motion trajectory from deviating and additional friction from generating due to installation inclination.
The load-bearing steel frame is fastened to the movable trolley by high-strength bolts, with anti-slip gaskets installed between the contact surfaces. The contact area between the trolley and the flow channel of the test section must be kept flat to ensure smooth movement without jamming or deviation. After fixation, positioning pins shall be used for locking to prevent trolley displacement during the test.
The magnetic induction displacement transducer shall be strictly parallel to the linear guide ways. The connection between the sensor probe and the accessory plate of the transmission structure shall be firm and locked by special fixtures to avoid relative displacement between the probe and the accessory plate. The initial distance between the sensor probe and the measurement datum plane should be set at the mid-range position (approximately 400 mm) to prevent measurement saturation caused by approaching the two ends of the measuring range. The voltage signal lines shall adopt shielded cables and be routed away from power cables to avoid electromagnetic interference.

Schematic diagram of oscillation system.
Energy conversion system
The Energy conversion system mainly consists of the disc-type generators and the data acquisition unit. As illustrated in Fig. 3, the disc-type generator was applied in the system to harvest energy transferred by the transmission part, and conveyed the electricity to the load resistance, simulating the consumption of electrical energy under external loads. The voltages of the resistance were recorded to reveal the energy conversion of the disc-type generators, and the data provided a foundation for following analysis.

Schematic diagram of energy conversion system and load resistance. (a) energy conversion system, (b) data acquisition system and load resistance.
Generators
The axial-flux, coreless permanent-magnet generators implemented in this study offer several notable advantages over conventional radial-flux DC motors: namely, higher magnetic efficiency, simplified and lightweight construction, increased power density, and reduced losses, which are conducive for energy harvesting. To investigate higher-efficiency power generation, generators with rated powers of 50 W, 100 W, 200 W, and 300 W were employed in the experiments to further enhance the energy conversion efficiency of the system, as illustrated in Fig. 4.

Experimental generators of varying rated powers.
Visualized self-circulating channel
All laboratory tests in this paper were conducted in the large-scale visualized circulating flume facility of the State Key Laboratory of Hydraulic Engineering Simulation and Safety at Tianjin University.
As shown in Fig. 5, the large-scale visualized circulating flume is composed of five main components: a water storage tank, a variable-frequency power water pump, a 2-m-wide flume, a curved flume, and a 1-m-wide flume. The total length of the facility is approximately 50 m with a water storage capacity of around 200 m3. The water storage tank has dimensions of 5 m ×5 m ×2 m. The variable-frequency power water pump has a maximum power of 90 kW, a maximum flow rate of 2600 L/s, and a maximum rotational speed of 490 r/min.
All tests were carried out in the 1-m-wide flume section, where the flow velocity could be adjusted within the range of 0–1.8 m/s. This specific flume section has a length of 21 m, a width of 1.0 m, and a depth of 1.5 m, with the water depth controlled at 1.34 m during the tests.

Visualized self-circulating channel.
To ensure the accuracy of flow velocity measurements in this experiment, two sets of flow velocity testing devices, namely a Pitot tube-manometer combined velocity measuring system and a propeller-type current meter, were employed to verify the flow velocity stability.
For the Pitot tube-manometer combined velocity measuring system, the manometer has a linear measurement range of 0–6 kPa, a sensitivity of 0.1%, and an accuracy of ± 0.1%. The propeller-type current meter features a starting flow velocity of 0.01 m/s and a velocity measurement range of 0.01–4 m/s.
To analyze the variations in flow velocity and turbulence intensity of the incoming flow with water depth, the distributions of velocity and turbulence intensity were measured at water depths ranging from 15 cm to 100 cm. Owing to viscous effects, the flow velocity near the bottom tends to decrease, while the velocity difference within the experimental region (20–100 cm) is relatively small, as shown in Fig. 6(a). Turbulence intensity increases with decreasing flow velocity and increasing water depth, and the turbulence difference within the vibration region (20–100 cm) is also minimal, as presented in Fig. 6(b).
Overall, it can be ensured that the fluid acting on the oscillator within the experimental region is a uniform flow with controllable velocity.

Incoming flow characteristic analysis36. (a) flow velocity calibration, (b) turbulence intensity calibration.
Theoretical basis
Oscillation response of the FIMECS system
Under the action of hydrodynamic forces, the amplitude and vibration frequency of the FIM system are jointly governed by both internal and external factors of the system. Internal factors mainly include the dimensions of the oscillator and the total damping of the system, among which the factors affecting system damping consist of system stiffness, external resistance, generator selection and configuration, as well as gear-rack ratio. External factors mainly involve fluid density, fluid flow velocity, and variations in the phase difference between hydrodynamic force and the vibration displacement of the oscillator.
The dynamic equation of the FIM system can be expressed as follows:
where A is the amplitude of the oscillator; fosc is the dominant vibration frequency of the oscillator; ρ is the fluid density; D is the characteristic width of the oscillator, i.e., the projected width of the oscillator along the flow direction; l is the length of the oscillator; U is the fluid flow velocity; Cy is the maximum lift coefficient; Φ is the phase difference between vibration displacement and lift force; and Ctotal is the total damping coefficient of the system.
The system includes both mechanical damping Cmech and electrical damping Charn, which is given by the following equation:
where Cmech is the mechanical damping coefficient of the system; and Charn is the electrical damping coefficient of the system.
Energy conversion of the FIMECS system
During the experiment, the electrical energy harvested by the system was dissipated in the form of resistive heat, and the voltage variation across the external resistor was collected in real time, thus enabling the calculation of the power generation capacity and energy conversion efficiency of the system.
The energy conversion efficiency is derived as:
where, horn is energy conversion efficiency, BetzLimit is the theoretical maximum power that can be extracted from an open flow and is equal to 59.26% (16/27), Pharn is the active power and Pw is the total power in the fluid which is written as:
where, ρ is the water density, U is the incoming flow velocity, Amax is the maximum amplitude in the oscillation period, D is the projection width of the triangular prism in the direction of incoming flow, and L is the prism length.
Free decay test
The natural frequencies and damping ratios of the system were determined via the free decay test. To minimize the measurement error, four tests were performed per stiffness and load resistance, and the average value of the four tests was taken. The results for K = 1600 N/m are shown in Fig. 7.

Free decay tests at K = 1600 N/m. (a) Generator rated at 50 W, (b) Generator rated at 100 W, (c) Generator rated at 200 W, (d) Generator rated at 300 W.
The theoretical framework and analytical formulations governing the free decay tests have been comprehensively established in earlier studies36,37,38. The stiffness range of 1200–2000 N/m was selected to define the properties of the system and calculate the physical parameters.
Calculation formula for the natural vibration frequency of the system:
where fn is the natural vibration frequency of the system in air, K is the system stiffness, and mosc is the system mass.
Calculation formula for the system damping ratio:
where ζair is the damping ratio of the system in air; Ai is the amplitude of the i-th peak in the free decay test; Ai+1 is the amplitude of the (i + 1)-th peak in the free decay test.
Calculation formula for the system damping:
Vibration parameters of the system, such as natural vibration frequency and damping ratio, are obtained via calculations using equations, (5), (6) and (7). In the free decay test, the DC motor is kept in an open-circuit state, such that only mechanical damping exists in the system. The total damping error corresponding to different stiffness values should fall within the allowable range of experimental errors (i.e., ± 5% relative to the average value). As shown in Tables 1, 2, 3 and 4, the generator rated at 50 W was abandoned due to the lowest damping, which is not conducive to high efficiency.
Results and discussion
In this section, the FIM responses and energy conversion with respect to reduced velocity (Ur) are analyzed to reveal the characteristics of the system. Considering the effects of system stiffness on the FIM responses and energy conversion of the prism, as well as the damping and natural frequency performance in Tables 1, 2, 3 and 4, the value of K = 1600 N/m was selected for the following experimental investigation. Meanwhile, to prevent the FIMECS and avoid the prism piercing the free surface or colliding the water channel, the parameters were controlled at reasonable range, as shown in Table 5.
Overall oscillation response
To reveal more comprehensive characteristics for the FIM responses of the triangular prism, several dimensionless parameters are defined, such as the amplitude ratio A*, frequency ratio f*, and reduced velocity Ur. All the analysis were based on continued oscillation at 60 s to ensure the accuracy and stability of experimental tests. As an important factor for evaluating the stability of the oscillation, the displacement time history provides valuable insights into the dynamic performance of the system. To visualize and evaluate the oscillation characteristics for different response branches, the 60 s displacement time histories with various reduced velocity for VIV and galloping are analyzed.
Generator rated at 100 W
Oscillation responses
The variation of amplitude ratio A* and frequency ratio f* with respect to the reduced velocity Ur at different load resistance cases are shown in Fig. 8, where a 100 W generator was employed in the system. The oscillation responses of the prism can be categorized into two distinct types: typical vortex-induced vibration (VIV) and typical galloping, and the two responses can be characterized in detail as follows:
(1) Typical VIV (RL=4 Ω).
For RL=4 Ω, the oscillation of the triangular prism performs as typical VIV within the tested flow velocity range of 0.67 m/s ≤ U≤1.21 m/s (4.9 ≤ Ur≤8.9), and the prism started to oscillate at Ur=4.9 (U = 0.67 m/s).
In the reduced velocity range of 4.9 ≤ Ur≤5.6, both the amplitude ratio A* and frequency ratio f* continued to increase with increasing Ur and performed relatively low values. Specifically, A* increased from an initial value of 0.24 to 0.52, while f* increased from 0.6 to 0.7, as shown in Fig. 8. The oscillation in this flow velocity range performs as the initial branch of VIV. As Ur increased to 5.6 ≤ Ur≤7.8, the oscillation performed as the upper branch of VIV. A* increased with the increasing Ur but f* remained at around 0.7, suggesting the appearance of the “lock-in” phenomenon with more stable oscillation. For Ur≥7.8, the A* began to decrease, while the f* gradually increased to approximately 0.9, indicating that the oscillation of the system entered the lower branch of VIV. As the Ur increased, the maximum frequency ratio of f*=0.98 (Ur=8.9, U = 1.21 m/s) can be observed.

Oscillation response for generator rated at 100 W. (a) Responses of amplitude ratio, (b) Responses of frequency ratio.
(2) Typical galloping (RL≥6 Ω).
For the load resistance range of 6 Ω ≤ RL≤31 Ω and the case of generator in open-circuit (RL=∞), the oscillation of the prism performed as typical galloping. As the reduced velocity Ur continued to increase within the tested range (4.4 ≤ Ur≤8.9), the oscillation experienced the VIV initial branch, VIV-galloping branch and the fully developed galloping branch. The critical reduced velocity for starting to oscillate varied with the load resistance. Larger load resistance attributed to smaller reduced velocity (Ur=4.4) to oscillate at RL=21 Ω, 26 Ω and 31 Ω, while the prism began to oscillate at Ur=4.9 for the remaining cases. The detailed responses can be summarized as follows:
In the reduced velocity range of 4.4 ≤ Ur≤5.6, the oscillation was in the VIV initial branch with relatively low values of both A* and f*. However, both the responses increased gradually with increasing Ur, which indicates the enhancement of resonance. Specifically, A* increased from 0.1 to approximately 0.59–0.72, and f* increased from around 0.54 to about 0.72, representing more violent and stable oscillation with increasing reduced velocity. For 5.6 ≤ Ur≤7.8, due to the combined effects of resonance and lift-force instability in the VIV-galloping branch, A* increased significantly from 0.79 to 0.89 to 1.28–1.40, and larger load resistance attributed to higher A*. The f* stabilized at 0.7 and performed decreasing trend. As the Ur increased to Ur≥8.1 without suppression in the system, the oscillation entered the fully developed galloping branch. A* continued to increase with increasing reduced velocity, reaching a maximum value of A*=1.69 (RL=∞), while f* remained stable within the range of 0.65–0.70. Once galloping was established, no significant attenuation of amplitude ratio was observed during the experiments. However, due to experimental limitations, the maximum reduced velocity tested was Ur=8.9 (U = 1.21 m/s).
Displacement time history
For the case of RL=4 Ω, the oscillation entered VIV at U = 0.67 m/s (Ur=4.9). In the initial branch of VIV, the oscillation exhibited pronounced instability: the displacement time history curve performed significant fluctuations, and the overall amplitude remained at a relatively low level. As shown in Fig. 9, the maximum displacement of 47.47 mm can be observed at U = 0.67 m/s (Ur=4.9). The fluctuation in displacement became more significant at U = 0.7 m/s (Ur=5.1). However, as the flow velocity increased to U = 0.76 m/s (Ur=5.6), the fluctuations in oscillation gradually disappeared and the oscillation performed more stably with a maximum displacement of 77.92 mm.

Displacement time histories of VIV initial branch at RL=4 Ω.
With increasing flow velocity, the oscillation entered the upper branch of vortex-induced vibration (VIV) at U = 0.83 m/s (Ur=6.1). The increasing excitation force exerted by the fluid on the prism increased accordingly, driving a steady growth in oscillation amplitude. There were more stable oscillation and little fluctuations in the displacement time history. The maximum value of 158.84 mm can be observed at U = 1.06 m/s (Ur=7.8), as shown in Fig. 10(a). Compared with the initial branch, there were characterized by more stable oscillation performance and larger amplitudes.

Displacement time histories of VIV at RL=4 Ω. (a) upper branch, (b) lower branch.
As the flow velocity continued to increase and reached U = 1.1 m/s (Ur=8.1), the oscillation entered the VIV lower branch, as well as the fluctuations in the displacement time history became more obvious again. For U ≥ 1.13 m/s (Ur≥8.3), the displacement time history displayed a trend toward disorder, and the amplitude showed no evident pattern of steady growth or frequency locking in the time domain, as shown in Fig. 10(b).
For U ≥ 1.10 m/s (Ur≥8.1) at RL=31 Ω, the oscillation entered the galloping branch. The displacement time history performed neither pronounced amplitude jumps nor irregular fluctuations. The oscillation was characterized by large amplitudes and high stability, with the displacement values being markedly greater than those observed in all branches of VIV, as shown in Fig. 11.

Displacement time histories of galloping branch at RL=31 Ω.
Frequency spectrum
As shown in Fig. 12, within the range of 4.9 ≤ Ur≤5.6, the oscillation entered the VIV initial branch. As the reduced velocity increased, the frequency band narrowed from its initially broad distribution, indicating a progressive concentration of oscillation energy, accompanied by a slight increase in the dominant frequency toward the natural frequency. For 5.6 ≤ Ur≤7.2, the oscillation transitioned into the VIV upper branch, where the frequency band became narrower and the dominant frequency was clearly defined, indicating a stable oscillation. The oscillation frequency closely matched the natural frequency, evidencing a pronounced “lock-in” phenomenon with strongly concentrated oscillation energy. As the reduced velocity increased to Ur≥7.8, the frequency spectrum performed a relatively wide band with multiple peaks, the dominant frequency became indistinct, and the energy was widely dispersed, indicating a significant detuning behavior and marking the transition into the lower branch of VIV.

Power spectrum at RL=4 Ω. (a) Initial and upper branch of VIV, (b) Lower branch of VIV.
For the case of RL=31 Ω, the oscillation performed as soft galloping. Within the range of 4.4 ≤ Ur≤5.6, the oscillation entered the VIV initial branch with a relatively wide frequency band and poor periodicity, as shown in Fig. 13. As the flow velocity increased, the frequency band progressively narrowed, and the oscillation energy became increasingly concentrated. For 5.6 ≤ Ur≤7.8, the oscillation entered the VIV-galloping branch, where the frequency band continued to narrow and the dominant frequency became more pronounced, indicating a significant improvement in oscillation stability, with the energy being relatively concentrated. As the flow velocity increased to Ur≥8.1, the dominant frequency became highly distinct, the bandwidth was very narrow, and the oscillation energy was strongly concentrated. The system exhibited a relatively large oscillation intensity with a comparatively low oscillation frequency. Meanwhile, weak second-harmonic and third-harmonic components were present, which was caused by the high flow velocity and complex modes of vortex shedding. However, the harmonic energy was significantly smaller than that of the oscillation frequency, thus the overall oscillation stability was not compromised.

Power spectrum at RL=31 Ω. (a) VIV initial and VIV-galloping branch, (b) Galloping branch.
Generator rated at 200 W
Oscillation responses
The variation of amplitude ratio A* and frequency ratio f* with respect to the reduced velocity Ur at different load resistance cases is shown in Fig. 14, where a 200 W generator was employed in the system. There are two significant FIM responses of VIV and galloping, and the responses can be characterized in detail as follows:
(1) Typical VIV (RL=4 Ω, 6 Ω, 8 Ω).
Both the VIV initial branch and VIV upper branch can be observed clearly in the oscillations at RL=4 Ω, 6 Ω and 8 Ω, and the prism started to oscillate at Ur=4.2 (U = 0.63 m/s). Within the lower reduced velocity range of 4.2 ≤ Ur≤5.6, the amplitude ratio and frequency ratio remained relatively small values. Specifically, A* increased from an initial value of 0.13–0.19 to 0.41–0.60, while f* rose from approximately 0.5 to around 0.7, indicating the characteristic of the VIV initial branch. As Ur increased to 5.6 ≤ Ur≤8.1, both the A* and f* performed significant increasing trend. The A* increased from 0.41 to 0.60 to 0.50–0.76, and f* increased from around 0.7 to the range of 0.89–1.01. The maximum value of A* and f* were respectively A*=0.76 at Ur=8.06 (RL=8 Ω) and f*=1.01 at Ur=8.06 (RL=4 Ω). It was also noted that a higher load resistance generally led to larger amplitude ratios, whereas the frequency ratio tended to decrease at a constant reduced velocity.

Oscillation response for generator rated at 200 W. (a) Responses of amplitude ratio, (b) Responses of frequency ratio.
(2) Typical galloping (RL≥11 Ω).
For the load resistance range of 11 Ω ≤ RL≤31 Ω and the case of generator in open-circuit (RL=∞), the amplitude ratio A* continued to increase as Ur increased without decreasing trend. The critical reduced velocity for the start of oscillation varied depending on the load resistance value. For RL≥31 Ω, where the total damping of the system was relatively low, the oscillation initiated at Ur=3.7 (U = 0.56 m/s), while the system started to oscillate at Ur=4.2 (U = 0.63 m/s) for the remaining load resistance. The responses can be summarized as follows:
In the range of 3.7 ≤ Ur≤5.2, the oscillation performed as the VIV initial branch, Both the amplitude ratio A* and frequency ratio f* remained relatively low values but increased gradually as the flow velocity rose. The A* increased from approximately 0.1 to 0.5–0.7, while the frequency ratio increased from about 0.5 to 0.65, reflecting enhanced resonance performance and increasing oscillation intensity. As the reduced velocity Ur increased to 5.2 ≤ Ur≤7.1, the transition from VIV to galloping was observed significantly. This phase was marked by a significant amplification in oscillation amplitude, with A* rising from 0.5 to 0.7 to 1.15–1.33. A higher resistance typically led to a larger amplitude. Meanwhile, the frequency ratio f* tended to decrease and stabilize around 0.6–0.7. Compared with the initial VIV branch, the VIV-galloping transition regime performed clearly improved oscillation intensity and stability. For Ur≥7.1, the oscillation entered the fully developed galloping branch. The amplitude ratio reached a maximum value of A*=1.62 at the case of generator in open-circuit (RL=∞), while the frequency ratio remained relatively stable within the range of 0.6–0.7. Throughout the galloping regime, the A* kept to increase without decreasing trend. However, due to the experimental constraints, the maximum achievable Ur in the tests was limited to Ur=8.1 (U = 1.2 m/s).
Displacement time history
Typical cases of RL=4 Ω for VIV and RL=31 Ω for galloping branches were considered to evaluate the oscillation with a generator rated at 200 W, and the displacement time histories at 60 s were analyzed.
As the reduced velocity increased to U = 0.63 m/s (Ur=4.2) at RL=4 Ω, the oscillation entered the VIV initial branch with pronounced instability in the oscillation and strong fluctuations in the displacement time history. After approximately 40 s, larger fluctuations can be observed, although the overall amplitude remains at a low level, with the maximum absolute amplitude being 33.36 mm. As the flow velocity increased, the amplitude gradually grew, reaching a maximum value of 51.94 mm at U = 0.77 m/s (Ur=5.1), as shown in Fig. 15.

Displacement time histories of VIV initial branch at RL=4 Ω.

Displacement time histories of VIV upper branch at RL=4 Ω. (a) Cases for U=0.85 m/s-1.06 m/s, (b) Cases for U=1.10 m/s-1.21 m/s.
For U ≥ 0.85 m/s (Ur≥5.6) at RL=4 Ω, the oscillation began to enter the VIV upper branch, where the fluctuations in displacement time history became relatively small and the oscillation was highly stable, as illustrated in Fig. 16. At U = 1.21 m/s (Ur=8.1) in the VIV upper branch, the maximum value of amplitude can reach 73.25 mm.
For the case of RL=31 Ω, the oscillation entered the galloping branch at U ≥ 1.1 m/s (Ur≥7.3), with strongly stable displacement. Due to the combined effects of resonance and lift-force instability, the oscillation was characterized by extremely large amplitude and high stability. At the maximum reduced velocity in the galloping branch of U = 1.21 m/s (Ur=8.1), the peak value of the amplitude reached 209.36 mm, which is significantly greater than that in the VIV branches, as shown in Fig. 17.

Displacement time histories of galloping branch at RL=31 Ω.
Frequency spectrum
As shown in Fig. 18, in the range of 4.2 ≤ Ur≤5.6 at RL=4 Ω, the oscillation performed as the VIV initial branch. As the flow velocity increased, the oscillation bandwidth, initially relatively broad, gradually narrowed, indicating a progressive concentration of oscillation energy. This process is accompanied by the increase in the dominant frequency, which gradually approached the natural frequency of the system. For 5.6 ≤ Ur≤8.1, the oscillation entered the VIV upper branch, where the oscillation bandwidth became narrow and the dominant frequency was clearly pronounced, reflecting a more stable oscillation. The oscillation frequency was nearly identical to the natural frequency of the system, demonstrating a pronounced “lock-in” phenomenon, with oscillation energy becoming even more concentrated.

Power spectrum at RL=4 Ω. (a) Initial branch of VIV, (b) Upper branch of VIV.
For the reduced velocity range of 3.7 ≤ Ur≤5.2 at RL=31 Ω, the oscillation entered the VIV initial branch, characterized by a relatively broad frequency bandwidth and poor periodicity. As the flow velocity increased, the bandwidth gradually narrowed and the oscillation energy became increasingly concentrated. As the reduced velocity increased to 5.2 ≤ Ur≤7.1, the oscillation entered the VIV-galloping transition branch, where the frequency bandwidth continued to narrow and the dominant frequency became more pronounced. The overall stability of the oscillation response improved significantly, with the oscillation energy remaining relatively concentrated, as shown in Fig. 19. For Ur≥7.1, the oscillation entered the fully developed galloping branch, with large amplitudes, a distinct and dominant frequency, highly concentrated oscillation energy and a slight reduction in frequency value compared with the VIV-galloping transition branch. Meanwhile, weak second-harmonic and third-harmonic components were also observed, which were caused by the high flow velocity and complex modes of vortex shedding. However, the harmonic energy was significantly smaller than that of the oscillation frequency, thus the overall oscillation stability was not compromised.

Power spectrum at RL=31 Ω. (a) VIV initial and VIV-galloping branch, (b) Galloping branch.
Generator rated at 300 W
Oscillation responses
The variation of amplitude ratio A* and frequency ratio f* with respect to the reduced velocity Ur at different load resistance cases are shown in Fig. 20, where a 300 W generator was employed in the system. The oscillation responses of the prism performed as typical soft galloping, and the responses can be characterized in detail as follows:
For all the cases with varied load resistance of 4 Ω ≤ RL≤31 Ω and the case of generator in open-circuit (RL=∞), the oscillation of the prism performed as the fully developed galloping within the tested reduced velocity range of 4.4 ≤ Ur≤8.9 (0.59 m/s ≤ U≤1.21 m/s). The amplitude ratio A* showed an overall increasing trend with increasing Ur, and the oscillation sequentially passed through the VIV initial branch, VIV-galloping transition branch, finally a fully developed galloping branch.

Oscillation response for generator rated at 300 W. (a) Responses of amplitude ratio, (b) Responses of frequency ratio.
The critical reduced velocity for the start of oscillation varied depending on the load resistance value. For RL≥8 Ω, due to the relatively lower total damping in the system, the prism started to oscillate at Ur=4.4 (U = 0.59 m/s). In contrast, for smaller load resistances of RL=4 Ω and RL=6 Ω, the prism started to oscillate at Ur=4.9 (U = 0.67 m/s).
In the range of 4.4 ≤ Ur≤5.6 (0.59 m/s ≤ U≤0.77 m/s), the system response was dominated by the VIV initial branch, characterized by relatively small amplitude and frequency ratios. As the reduced velocity increased, the A* increased from approximately 0.1 to 0.63–0.77, while the f* increased from 0.52 to 0.57 to 0.67–0.73. The gradual amplification in amplitude indicates enhanced oscillation intensity. For 5.6 ≤ Ur≤7.8 (0.77 m/s ≤ U≤1.06 m/s), the oscillation entered the VIV-galloping translation branch. Due to the combined effects of resonance and lift-force instability, the A* increased from 0.63 to 0.77 to 1.31–1.42 sharply, and it was obvious that larger load resistance led to higher amplitude ratio. The f* became relatively stable around 0.7. Notably, the case of RL=6 Ω showed a slightly higher f* values compared to other cases. Overall, the oscillation in the VIV-galloping transition branch was more stable and more intense than in the initial VIV branch. For Ur≥7.8, the oscillation entered the fully developed galloping branch. With the increasing Ur, the A* continued to increased and reached a maximum value of A*=1.72 at RL=21 Ω, while the f* remained stable around 0.65. There was no suppression existed after the oscillation entered the galloping branch, but the maximum achievable Ur in this test was limited to Ur=8.9 (U = 1.21 m/s).
Displacement time history
Only soft galloping appeared with a generator rated at 300 W, thus the typical case of RL=31 Ω for galloping branches were considered to evaluate the oscillation with a generator rated at 300 W, and the displacement time histories at 60 s were analyzed.
As the reduced velocity increased to U = 0.59 m/s (Ur=4.4), the oscillation performed as VIV initial branch. The amplitude was approximately 30 mm, with occasional local amplitude fluctuations. The oscillation presented very weak stability, as shown in Fig. 21(a). As the flow velocity increased to 0.85 ≤ U ≤ 1.06 m/s (6.1 ≤ Ur≤7.8), the oscillation entered the VIV-galloping branch. The amplitude was significantly higher than that in the initial branch although small-amplitude fluctuations remained at U = 0.85 m/s (Ur=6.1), and the waveform approached a sine shape. As the flow velocity increased, the amplitude continued to increase to 190.41 mm at U = 1.06 m/s (Ur=7.8). The fluctuations became negligible, indicating that the oscillation had entered a steady state, as shown in Fig. 21(b).
For 1.1 ≤ U ≤ 1.21 m/s (8.1 ≤ Ur≤8.9), the oscillation entered the galloping branch. The displacement time history showed no obvious amplitude jumps or fluctuations, and the oscillation remained stably within 200–220 mm, as shown in Fig. 22. The oscillation performed extremely large amplitude and high stability, with a maximum displacement of 222.14 mm, which was substantially greater than those observed in the VIV and transition branches.

Displacement time histories of VIV at RL=31 Ω. (a) initial branch, (b) galloping branch.

Displacement time histories of galloping branch at RL=31 Ω.
Frequency spectrum
As shown in Fig. 23, the oscillation of the system performed as the VIV initial branch with a relatively broad frequency band and poor periodicity at 4.4 ≤ Ur≤5.6. As the flow velocity increased, the frequency band gradually narrowed, and the oscillation energy became increasingly concentrated. For the VIV-galloping branch at 5.6 ≤ Ur≤7.8, the frequency band continued to narrow, and the dominant frequency became more pronounced, indicating a significant improvement in oscillation stability and a relatively concentrated oscillation energy. For Ur≥8.1, the oscillation entered the fully developed galloping branch, where the dominant frequency was highly prominent. The oscillation energy was highly concentrated, and the system performed strong oscillation intensity with a relatively low frequency. Meanwhile, weak second-harmonic and third-harmonic components were also observed, which were caused by the high flow velocity and complex modes of vortex shedding. However, the harmonic energy was significantly smaller than that of the oscillation frequency, thus the overall oscillation stability was not compromised.

Power spectrum at RL=31 Ω. (a) VIV initial and VIV-galloping branch, (b) Galloping branch.
Energy conversion
In this section, according to the results of energy conversion tests, the variations of the active power Pharn and energy conversion efficiency ηharn of the system with different load resistances were calculated and analyzed, where Pharn is defined as the average value of the instantaneous power over the 60 s monitoring sample. As the reduced velocity Ur increased, the oscillation of the system performed different modes with varied load resistance, such as the VIV and galloping, which is mainly depended on the value of total damping in the system. The difference in the oscillation responses directly resulted in distinct energy conversion characteristics.
Energy conversion analysis for generator rated at 100 W
As shown in Fig. 24, the active power of the system corresponding to VIV first increases and then decreases as the reduced velocity within the tested range, which is fully consistent with the inherent characteristics of VIV. The amplitude ratio remains relatively low values, and the oscillation stability is highly sensitive to velocity variation. However, once the oscillation entered the galloping branch, due to the lift-force instability, the system oscillated in large A* and low f*, which is conducive to energy harvesting and more stable. As a result, the active power increased steadily with increased Ur. In the tests for the generator rated at 100 W, the maximum active power value of Pharn=11.28 W appeared at RL=6 Ω and Ur=8.6. Notably, the results also reveal that the variations of Pharn at different load resistance presented significant differences, which is caused by the varied total damping. Moreover, the oscillation was affected, thereby impacting the energy conversion of the system. The specific performances at varied load resistance are summarized as follows:
Within the tested reduced velocity, the oscillation performed as VIV at RL=4 Ω, and the variation of the active power closely follows the typical trend of VIV: a gradual increase with reduced velocity, reaching a peak followed by a subsequent decline. The maximum value of Pharn=6.69 W appeared at Ur=7.8 (U = 1.06 m/s). For RL=6 Ω within the tested Ur range of 4.9 ≤ Ur≤8.9 (0.67 m/s ≤ U≤1.21 m/s), the oscillation performed as galloping. The active power presented a continuously increasing trend, rising to the maximum value of Pharn=11.28 W at Ur=8.6. However, the active power began to decrease at a slight rate as the Ur increased to Ur=8.9, which may be caused by the local disorder of vortex shedding. However, due to that the galloping is “self-excited”, such disturbances are effectively resisted, resulting in only a marginal decrease in active power that remains near the peak value.

Energy conversion for generator rated at 100 W. (a) Active power, (b) Energy conversion efficiency.
For the remaining cases with different resistance, similar trends were observed with the system entering the galloping branch at higher Ur. The Pharn increased monotonically with increasing Ur, and lower value of load resistance led to higher active power. The maximum value of Pharn=10.12 W appeared at RL=8 Ω (Ur=8.9).
For the VIV branches at RL=4 Ω, the energy conversion efficiency ηharn performed the trend of initial increase, followed by fluctuations and eventual decline with increasing Ur. The peak value of ηharn reached 4.76% at Ur=7.8. For the galloping branches at other cases, the value of ηharn increased with decreasing RL. The maximum value of ηharn = 6% appeared at RL=6 Ω and Ur=7.2.
Within the range of 4.4 ≤ Ur≤5.6, the ηharn increased sharply to 3%-5% as Ur increased, corresponding to the VIV initial branch. As Ur increased to 5.6 ≤ Ur≤7.8, the difference of ηharn at different load resistance became more significant. Notably, the case of RL=6 Ω had better performance at the energy conversion efficiency with ηharn ≥ 5%, as shown in Fig. 24(b). For Ur≥7.8, the oscillation entered the fully developed galloping branch with larger amplitude ratios. However, the scanning area increased, resulting in a decrease in energy conversion efficiency.
As shown in Fig. 24, the results showed that there exists a optimal damping case of RL=6 Ω with higher ηharn, and the maximum value of ηharn is 5.16% at Ur=8.6, corresponding to the active power of Pharn=11.28 W.
Energy conversion analysis for generator rated at 200 W
At the reduced velocity of Ur≥3.7 (U ≥ 0.56 m/s), the system began to oscillate and generate electrical power. As the Ur increased, the oscillations performed different modes, which led to markedly different energy conversion characteristics. As shown in Fig. 25, for the cases dominated by VIV (RL=4 Ω, 6 Ω, and 8 Ω), the active power Pharn generally increased with the increasing reduced velocity, indicating the VIV initial branch and the VIV upper branch. The VIV lower branch was not observed within the tested range of reduced velocity, which ensured the increase in the active power.
For the other load resistance values, the oscillation entered the galloping branch with the increasing Ur. suggesting better performance in amplitude and energy conversion. Consequently, the active power increased steadily with Ur. In the experimental tests with the generator rated at 200 W, the maximum active power value of Pharn=21.09 W appeared at RL=11 Ω and Ur=8.1. The differences in the active power at different load resistance performed significantly, which was caused by the variation of total damping in the system. The active power at different load resistances can be divided into two main patterns:
(1) For the case of RL=4 Ω, 6 Ω and 8 Ω, the oscillation of the system performed as the VIV initial branch and VIV upper branch. The variation of Pharn was strongly tied to the evolution of VIV: the Pharn increased gradually with Ur, reaching a peak value of Pharn=11.43 W at RL=8 Ω and Ur=8.1.
(2) In the range of 11 Ω ≤ RL≤31 Ω, the oscillation performed as typical soft galloping within the reduced velocity range of 3.7 ≤ Ur≤8.1. The active power Pharn increased steadily, and lower resistances led to higher power at a constant Ur. In this regime, increased Ur accelerated the oscillation of the system, due to the combined effects of resonance and lift-force instability, the active power was improved. The maximum value of Pharn=21.09 W appeared at RL=11 Ω and Ur=8.1.

Energy conversion for generator rated at 200 W. (a) Active power, (b) Energy conversion efficiency.
As shown in Fig. 25(b), the energy conversion efficiency ηharn of the system performed a gradual increase with reduced velocity, followed by fluctuations and eventually a decline trend in the VIV regime. The peak value of ηharn was 10% at RL=8 Ω and Ur=6.1. The ηharn presented the trend of first increase and them began to decrease after the oscillation entered the galloping branch, and the ηharn increased with decreasing RL. The maximum value of 12.13% appeared at RL=11 Ω and Ur=5.2.
In the range of 3.7 ≤ Ur≤4.7, all the ηharn at different load resistance presented low values due to the small fluid force, and the increasing rate was also small, corresponding to the VIV initial branch. As the Ur increased to 4.7 ≤ Ur≤6.1, the divergence in efficiency growth among the cases emerged. The case of RL=11 Ω showed the most pronounced growth rate, reaching the maximum efficiency of ηharn = 12.13% at Ur=5.2. In contrast, the growth rates for other resistances were more modest, all remaining below 10%, indicating that the case of RL=11 Ω had the best performance on energy conversion. For Ur≥6.1, the oscillation entered the fully developed galloping branch with stable amplitude ratio, but the ηharn began to decrease due to the increasing scanning area. The peak value of ηharn at the galloping branch was ηharn = 9.15% at RL=11 Ω and Ur=8.1, corresponding to the active power of Pmax=21.09 W.
Energy conversion analysis for generator rated at 300 W
As shown in Fig. 26, for the cases of different load resistance with a generator rated at 300 W in the system, the active power Pharn varied obviously with increasing Ur. Overall, the Pharn increased monotonically as Ur increased, primarily because the oscillation sequentially experienced the VIV initial branch, VIV-galloping branch and the galloping branch, which ensure the increase in amplitude and energy conversion. In the galloping branch, due to the combined effects of resonance and lift-force instability, increased amplitude resulted in larger Pharn. The maximum value of Pharn=14.01 W appeared at RL=6 Ω and Ur=8.9 of the galloping branch. Noticeable differences were observed in the active power at different load resistance, owing to the fact that the load resistance affected the total damping in the system, thereby affecting energy conversion efficiency.
Specifically, for 4 Ω ≤ RL≤31 Ω, the oscillation entered the galloping branch by self-excitation within the tested Ur range. In the VIV initial branch of 4.4 ≤ Ur≤5.6, due to the low amplitude, the increasing rate of Pharn also performed lower values. However, as the Ur increased to 5.6 ≤ Ur≤7.8 of the VIV-galloping branch, the oscillation frequency approached the natural frequency of the system, leading to a significant amplitude increase and the fastest increasing rate of active power. For Ur≥7.8, the oscillation performed as the galloping branch, where the amplitude continued to increase and the frequency locked in, resulting in further increased active power but a slower rate. The case of RL=6 Ω had the best performance on energy conversion, and the maximum value of Pharn=14.01 W appeared at RL=6 Ω and Ur=8.9.

Energy conversion for generator rated at 300 W. (a) Active power, (b) Energy conversion efficiency.
The energy conversion efficiency ηharn performed the trend of rapid increase firstly with increasing reduced velocity, followed by fluctuations, and eventually a decline. The maximum value of ηmax = 7.17% appeared at RL=6 Ω and Ur=7.2, as shown in Fig. 26(b).
In the range of 4.4 ≤ Ur≤5.6, corresponding to the VIV initial branch, the efficiency for all the cases rapidly increased to approximately 3.5-6%. As the Ur increased to 5.6 ≤ Ur≤7.8, the efficiencies began to diverge among cases with different load resistances, where the case of RL=6 Ω demonstrated the most pronounced increasing rate and reached the maximum energy conversion efficiency of ηmax = 7.17% at Ur=7.2. In contrast, other cases performed slower increasing rate and even the decrease trend, which suggested that the case of RL=6 Ω had the best performance on energy conversion. For Ur≥7.8, the oscillation entered the fully developed galloping branch, and all the ηharn values began to decrease, which is caused by the increasing scanning areas.
Power generation characteristics of disc generators with different rated powers
This section presents an analysis of the power generation performance of disc generators with different rated powers through experiments. It comprehensively and systematically investigates the variation law of the system input power generation Pharn of motors with different powers with the actual flow velocity U under different external resistance conditions, as illustrated in Fig. 27. Herein, Pharn refers to the average power over a 60 s period. As the flow velocity increases gradually, the vibration system starts to output electrical energy. However, with the continuous rise of flow velocity, the oscillator exhibits different vibration modes under different external resistances RL. Specifically, the power generation and efficiency of motors with different powers demonstrate significant differences with the change of flow velocity under varied resistance conditions. In the power generation test of the single-drive motor, the maximum power generation Pharn=21.09 W is achieved at the galloping branch of the triangular prism oscillator with a flow velocity U = 1.21 m/s under the condition of a 200 W single-disc generator with an external resistance RL=11 Ω.

Overall Variation Law of Power Generation Characteristics of Disc Generators with Different Rated Powers. (a) Active power, (b) Energy conversion efficiency.
When RL=4 Ω, the 100 W motor system exhibited complete vortex-induced vibration (VIV). Both the power generation output and efficiency increased first to a peak value and then decreased with the rise of flow velocity. In contrast, the 300 W motor system presented soft galloping behavior, where the power generation output increased monotonically with increasing flow velocity, reaching a maximum value of 12.50 W; its power generation efficiency increased initially and then declined, with the peak efficiency of ηharn = 6.22% observed at a flow velocity of U = 1.06 m/s. As for the 200 W motor system, it underwent the initial branch and upper branch of VIV successively with the increase of flow velocity. Its power generation output increased monotonically with a relatively slow growth rate, while the power generation efficiency showed a trend of rising first and then falling.
When RL=11 Ω, all the 100 W, 200 W, and 300 W motor systems manifested soft galloping characteristics. The power generation output and efficiency of the three motor systems all exhibited an upward trend with increasing flow velocity. In the low flow velocity range (0.59 m/s ≤ U≤0.7 m/s), the power generation output of all motors remained at a low level. In the medium-to-high flow velocity range (0.7 m/s ≤ U≤1.06 m/s), the 200 W motor system achieved the fastest growth rate of power generation output. The power generation efficiency of the three motors all increased first and then decreased, with the maximum efficiency of ηharn = 12.13% obtained under the condition of a 200 W single-disc generator at U = 1.06 m/s in the single-drive test with RL=11 Ω. In the high flow velocity range (1.06 m/s ≤ U≤1.21 m/s), the power generation output of the three motors continued to rise, and the maximum power generation output of 21.09 W under RL=11 Ω was achieved by the 200 W motor system at U = 1.21 m/s.
When RL=31 Ω, the 100 W, 200 W, and 300 W motor systems all demonstrated soft galloping behavior. The power generation output of the three motor systems increased with increasing flow velocity, while their power generation efficiency showed a trend of increasing first and then decreasing. In the single-drive test with RL=31 Ω, the maximum power generation output of 13.77 W was achieved by the 200 W single-disc generator at U = 1.21 m/s, and the maximum efficiency of ηharn = 7.04% was obtained by the same 200 W single-disc generator at U = 0.85 m/s.
Conclusions
The FIM responses and the energy conversion of the FIMECS with a triangular prism were investigated experimentally. The flow velocity range of U = 0.556 m/s-1.209 m/s were selected, as well as the effects of load resistance was analyzed with different disc-type generators. The amplitude ratio A*, frequency ratio f*, displacement time history and the power spectrum for the oscillation are presented and discussed to reveal the performances of the system, the specific conclusions can be summarized as follows:
(1) As the reduced velocity increased, the sequential transitions from the VIV initial branch to the VIV-galloping transition branch and finally to the fully developed galloping branch can be observed in the tests. Lower total damping (higher load resistance) reduced the critical reduced velocity for oscillation onset, promoting a larger flow velocity range for oscillation.
(2) The oscillation performed low values for A* and f*, in the VIV initial branch, while the rapid increase in the VIV-galloping transition branch. For the fully developed galloping branch, there are always large values with strongly stable oscillation. The maximum observed amplitude was 209.36 mm for the 200 W generator at U = 1.21 m/s (Ur=8.1) and RL=31 Ω.
(3) The transition from VIV to galloping was consistently accompanied by a decrease in frequency ratio f* and increase in amplitude ratio A*, which ensured a stable oscillation and improved energy conversion performance.
(4) A systematic comparison was conducted on disc generators with different rated powers in the experiment. With the generator rated at 200 W, the preferred performance on energy conversion was achieved. The maximum active power in the tests reached Pmax=21.09 W at RL=11 Ω and Ur=8.1, corresponding to the efficiency of ηharn = 9.15%. Meanwhile, the highest energy conversion efficiency ηharn = 12.13% appeared at RL=11 Ω and Ur=5.2, corresponding to the active power of Pharn=3.94 W.
Data availability
The data supporting the findings of this study are available from the corresponding author upon reasonable request.
References
Neshat, M. et al. Layout optimisation of offshore wave energy converters using a novel multi-swarm cooperative algorithm with Backtracking strategy: a case study from Coasts of Australia. Energy 239, 122463 (2022).
Wang, J., Su, Z., Li, H., Ding, L. & Zhu, H. Gaidai, O. Imposing a wake effect to improve clean marine energy harvesting by flow-induced vibrations. Ocean Eng. 208, 107455 (2020).
Narendran, K., Murali, K. & Sundar, V. Investigations into the efficiency of vortex- induced vibration hydro-kinetic energy device. Energy 109, 224–235 (2016).
Rostami, A. B. & Armandei, M. Renewable energy harvesting by vortex-induced motions: review and benchmarking of technologies. Renew. Sustain. Energy Rev. 70, 193–214 (2017).
Bernitsas, M. M., Raghavan, K., Ben-Simon, Y. & Garcia, E. Vivace (vortex induced vibration aquatic clean energy): a new concept in generation of clean and renewable energy from fluid flow. J. Offshore Mech. Arct. Eng. 130, 10–24 (2008).
Latif, U., Dowell, H. E., Uddin, E. & Younis, M. Y. Parametric aerodynamic and aeroelastic study of a deformable flag-based energy harvester for powering low energy devices. Energy. Conv. Manag. 280, 116846 (2023).
Latif, U., Dowell, H. E., Uddin, E., Younis, M. Y. & Frisch, H. M. Comparative analysis of flag based energy harvester undergoing extraneous induced excitation. Energy 295, 130995 (2024).
Shao, N. et al. Experimental investigation of f low-induced motion and energy conversion of a T-section Prism. Energies 11 (8), 2035 (2018).
Zhang, B., Song, B., Mao, Z., Tian, W. & Li, B. Numerical investigation on VIV energy harvesting of bluff bodies with different cross sections in tandem arrangement. Energy 133, 723–736 (2017).
Ding, L., Zhang, L., Wu, C., Mao, X. & Jiang, D. Flow-induced motion and energy harvesting of bluff bodies with different cross-sections. Energy. Conv. Manag. 91, 416–426 (2015).
Zhang, M. et al. Predefined angle of attack and corner shape effects on the effectiveness of square-shaped galloping energy harvesters. Appl. Energy. 302, 117522 (2021).
Sharma, G., Garg, H. & Bhardwaj, R. Flow-induced vibrations of elastically-mounted C- and D-section cylinders. J. Fluids Struct. 109, 103501 (2022).
Zhao, J., Hourigan, K. & Thompson, M. C. Flow-induced vibration of D-section cylinders: an afterbody is not essential for vortex-induced vibration. J. Fluid Mech. 851, 317–343 (2018).
Chen, W., Zhao, Y., Ji, C., Srinil, N. & Song, L. Experimental observation of multiple responses of an oscillating D-section Prism. Phys. Fluids. 33, 091701 (2021).
Latif, U. et al. Experimental electro-hydrodynamic investigation of flag-based energy harvesting in the wake of inverted C-shape cylinder. Energy 215 (PB), 119195 (2021).
Latif, U. et al. Impact of solid and Hollow bluff bodies on the performance and dynamics of flag-based energy harvester. Sustain. Energy Technol. Assess. 55, 102882 (2023).
Chen, W., Ji, C., Xu, D., Zhang, Z. & Wei, Y. Flow-induced vibrations of an equilateral triangular Prism at various angles of attack. J. Fluids Struct. 97, 103099 (2020).
Lian, J., Yan, X., Liu, F. & Zhang, J. Analysis on flow-induced motion of cylinders with different cross sections and the potential capacity of energy transference from the flow. Shock and Vibration. 1–19 (2017). (2017).
Sharma, A. A. & Saha, S. K. Flow-induced vibration of a cylinder subjected to proximity interference by a downstream-cylinder. J. Fluid Mech. 1015, A16 (2025).
Sun, H., Yang, Z., Li, J., Ding, H. & Lv, P. Performance evaluation and optimal design for passive turbulence control-based hydrokinetic energy harvester using EWM-based TOPSIS. Energy 298, 131377 (2024).
Mujtaba, A. et al. Hydrodynamic energy harvesting analysis of two piezoelectric tandem flags under influence of upstream body’s wakes. Appl. Energy. 282 (PA), 116173 (2021).
Shah, M. M. et al. Experimental investigation of the wake of tandem cylinders using Pivoted flapping mechanism for piezoelectric flag. Ocean Eng. 310 (P1), 118587 (2024).
Ali, U., Islam, M., Janajreh, I., Fatt, Y. Y. & Alam, M. M. Unveiling the dynamics of 2-DOF flow-induced vibrations and heat transfer: A comprehensive study of multi-cylinder configurations. Int. Commun. Heat Mass Transfer. 164, 108780 (2025).
Fan, T., Zhou, S., Sun, H. & Chen, C. Numerical simulation of FIV of PTC-cylinder with nonlinear springs at high Reynolds number. J. Ship Res. 17 (3), 160–169 (2022).
Lian, J. et al. Hydrokinetic energy harvesting from flow-induced motion of oscillators with different combined sections. Energy 269, 126814 (2023).
Liu, F. et al. Experimental investigation on flow-induced rotation of two mechanically tandem-coupled cylinders. Appl. Sci. 12 (20), 10604 (2022).
Feng, W., Yang, X., Yan, X. & Li, L. Investigation on flow-induced rotation of coupled double cylinders arranged in tandem. Journal of Offshore Mechanics and Arctic Engineering. 2024, 87851 (2024).
Zhang, B., Song, B., Mao, Z., Li, B. & Gu, M. Hydrokinetic energy Harnessing by spring-mounted oscillators in FIM with different cross sections: from triangle to circle. Energy 189, 116249 (2019).
Hu, G. et al. Experimental investigation on the efficiency of circular cylinder-based wind energy harvester with different rod-shaped attachments. Appl. Energy. 226, 682–689 (2018).
Zhu, H. et al. High performance energy harvesting from flow-induced vibrations in trapezoidal oscillators. Energy 236, 121484 (2021).
Ma, C. et al. Hydrokinetic energy conversion from flow-induced motion by two rigidly coupled triangular prisms with variable excitation voltage. Energy 322, 135757 (2025).
Tan, J. et al. Study on linear generator applied in tidal energy converter based on flow-induced motion. Acta Energiae Solaris Sinica. 41 (09), 9–14 (2020). (in chinese).
Zhang, H. et al. Xie, L. A high-output performance disc-shaped liquid-solid triboelectric nanogenerator for harvesting omnidirectional ultra-low-frequency natural vibration energy. Nano Energy. 121, 109243 (2024).
Lo, J. C. C., Thompson, M. C., Hourigan & Zhao, J. Order of magnitude increase in power from flow-induced vibrations. Renew. Sustain. Energy Rev. 205, 114843 (2024).
Li, Z., Zhao, T., Niu, B., Ma, Y. & Hu, C. A hydrokinetic Turbine-Based Triboelectric-Electromagnetic hybrid generator for ocean current energy harvesting. Energy. Conv. Manag. 326, 119473 (2025).
Shao, N., Lian, J., Liu, F., Yan, X. & Li, P. Experimental investigation of flow induced motion and energy conversion for triangular Prism. Energy 194, 116865 (2020).
Lian, J. et al. Experimental investigation of Flow-Induced motion and energy conversion for two rigidly coupled triangular prisms arranged in tandem. Energies 15, 8190 (2022).
Shao, N., Lian, J., Yan, X., Liu, F. & Wang, X. Experimental study on energy conversion of flow induced motion for two triangular prisms in staggered arrangement. Energy 249, 123764 (2022).
Funding
This research was supported by the National Natural Science Foundation of China (Grant No. 52409085); the Hebei Natural Science Foundation (Grant No. E2025402113, No. E2024402142); and the Science and Technology Project of Hebei Education Department (Grant No. BJK2023099).
Author information
Authors and Affiliations
Contributions
Conceptualization: H.W.; Methodology: H.W. and M.H.; Visualization: H.W.; Funding acquisition: N.S.; Project administration: G.L. and X.S.; Supervision: P.X.; Writing—original draft: H.W.; Writing—review and editing: N.S. All authors have read and agreed to the published version of the manuscript.
Corresponding author
Ethics declarations
Competing interests
The authors declare no competing interests.
Additional information
Publisher’s note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution-NonCommercial-NoDerivatives 4.0 International License, which permits any non-commercial use, sharing, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if you modified the licensed material. You do not have permission under this licence to share adapted material derived from this article or parts of it. The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by-nc-nd/4.0/.
About this article

Cite this article
Wang, H., He, M., Li, G. et al. Experimental optimization of disc-type generators for low-velocity hydrokinetic energy harvesting. Sci Rep 16, 7692 (2026). https://doi.org/10.1038/s41598-026-37988-9
Received:
Accepted:
Published:
Version of record:
DOI: https://doi.org/10.1038/s41598-026-37988-9
