
Abstract
Dense user communication systems suffer from coverage degradation at cell edges and increased power consumption due to unfavorable propagation conditions and high user density. To address these challenges, this paper presents an integrated communication framework that combines Intelligent Reflecting Surfaces (IRSs) and cell-free massive multiple-input multiple-output (MIMO) systems. By deploying IRSs, network coverage is extended to blind regions, while the use of distributed access points (APs) helps reduce transmit power per AP. The high user density is efficiently managed using the non-orthogonal multiple access (NOMA) technique through power-domain multiplexing. The mathematical formulations of the proposed framework are presented along with the channel and signal transmission modeling. Furthermore, two IRS phase shift optimization methods, namely alternating optimization (AO) and semidefinite relaxation (SDR) are investigated for maximum achievable rate. The two methods are compared for their convergence and complexity behaviour. Next, an AP selection algorithm, namely APSA, is proposed that dynamically assigns a set of APs to each user to reduce the resource overhead. The computational complexity analysis of the proposed algorithm is also investigated. The simulation results reveal an SINR gain of 4 dB for cell-center users and 2.4 dB for cell-edge users with the proposed selection approach. Comparative performance analysis is carried out against existing baseline approaches for varying transmit power, IRS elements, and user locations. The proposed integrated system is also compared with conventional system configurations. A use case scenario is presented to demonstrate its applicability in road surveillance and traffic monitoring. In the end, the practical constraints of the proposed work and the future directions are discussed.
Similar content being viewed by others

Introduction
With the exponential growth in wireless data traffic and the increasing demand for higher user capacity, energy efficiency and seamless connectivity, traditional cellular network architectures face significant limitations1. These include coverage holes, inter-cell interference and lack of flexibility in handling dynamic user distributions. To address these challenges, next-generation wireless systems require innovative architectures that move beyond the constraints of conventional cell-based paradigms1. Cell-free massive multiple-input multiple-output (MIMO) is an advanced wireless communication technology that aims to enhance network capacity, coverage and reliability by deploying a large number of distributed access points (APs) that jointly serve users without the traditional concept of cellular boundaries2. Unlike conventional cellular networks, where users are served by a single base station (BS) within a defined cell, in a cell-free massive MIMO system, all APs collaborate coherently using centralized processing to serve all users in the network simultaneously. This architecture reduces inter-cell interference and ensures more uniform service quality, especially in densely populated or hard-to-reach areas3,4. The need for cell-free massive MIMO technology arises from the increasing demand for high data rates, low latency and reliable connectivity in modern wireless networks, particularly with the expansion of fifth generation (5G) technology and beyond. By removing cell boundaries and utilizing spatial diversity more effectively, cell-free massive MIMO can provide better spectral efficiency, more robust user connections and improved fairness among users regardless of their location. This makes it especially suitable for future communication scenarios such as smart cities, Internet-of-Things (IoT) and augmented/virtual reality applications, where consistent and high-quality connectivity is essential.
However, these systems face significant challenges, particularly in terms of deployment cost, fronthaul limitations, and performance degradation in non-line-of-sight (NLOS) environments5,6. Owing to the dense uneven urban structures and buildings, the data transmission between users and the APs get blocked limiting the coverage. IRSs offer a compelling solution to these challenges. By intelligently adjusting the reflection properties of their passive elements, IRS can shape and enhance signal propagation without the need for active transmission or additional energy consumption7. The incoming signals can be beamformed towards intended users thus supporting line-of-sight (LOS) communication. Integrating IRS into cell-free massive MIMO systems helps to improve signal coverage, mitigate interference, and reduce the load on APs, especially in dense or obstructed urban areas8. The propagation environment can be improved to support more number of users without requiring additional APs or transmit power. By providing reconfigurable channels between APs and users, IRSs improve the performance of cell-free massive MIMO systems. With low deployment costs, IRSs can be mounted on the walls of high-rise buildings and the propagation of radio signals can be controlled without consuming additional power9,10. IRS can be classified into passive, semi-passive and active types based on their architecture and functionality. Passive IRS consists entirely of passive reflective elements that adjust the phase of incident electromagnetic waves without any signal amplification. These are highly energy-efficient but limited in performance enhancement11,12. Semi-passive IRS incorporates low-power active components such as sensors or microcontrollers to facilitate reconfiguration, reflection control and channel estimation. However, these do not alter the passive nature of the reflection process. Active IRS includes amplifying elements such as amplifiers, mixers or RF chains in every reflecting element that boost signal strength but require more power. Semi-active IRS also called hybrid active-passive IRS contains some passive elements along with a small subset of active elements that offers signal amplification and improved coverage12. The choice among these types depends on the deployment scenario and the required trade-off between performance and energy consumption13.
Cell-free massive MIMO systems typically serve a large number of users simultaneously, often with diverse quality-of-service (QoS) requirements and varying traffic demands. To efficiently handle multiple users in such a dense environment, advanced multiple access techniques are necessary. Non-Orthogonal Multiple Access (NOMA) is a promising candidate for this role. Unlike traditional orthogonal methods, which allocate separate time or frequency resources to each user, NOMA allows multiple users to share the same resources by superimposing their signals with different power levels14,15. This power domain multiplexing allows the stronger user to decode its signal and mitigate interference from weaker user using successive interference cancellation (SIC)16,17. In the context of cell-free massive MIMO, NOMA enhances spectral efficiency, supports massive connectivity, and reduces latency by enabling simultaneous transmission to multiple users. The problem of pilot contamination can be solved with shorter pilot intervals with the allocation of same pilot to more users. This provides user fairness by assigning more power to weak users18,19. Its ability to exploit differences in channel conditions and user locations makes it particularly suitable for IRS-assisted systems, where signal propagation can be tailored to further boost the performance of NOMA-based access20,21.
Related works
This section presents several studies that highlight the integration of IRSs in the cell-free massive MIMO systems for enhanced performance. The authors in Ref.22 explore this integration for maximum network throughput. The impact of spatial correlation is investigated and the channel estimation overhead is reduced. The energy efficiency is maximized in Ref.23 for the same system scenario but with multiple APs and multiple users. A distributed machine learning method is suggested in Ref.24 which allows each BS to locally design its beamforming vectors. Unlike conventional iterative optimization algorithms that require a lot of signaling overhead, one BS determines IRS reflection coefficients. Simulation findings demonstrate that IRS deployment greatly increases the weighted sum rate (WSR) with minimal computing cost . An IRS aided cell-free large MIMO system that optimizes beamforming at APs and phase shifts at IRSs to enhance energy efficiency is proposed in Ref.25. An iterative optimization approach employing quadratic transform and Lagrangian dual transform is presented to identify the best beamforming and phase shifts. The suggested approach is computationally demanding, limiting its practical use. In response, a deep learning-based hybrid beamforming and phase shift design method is presented. A two-stage deep neural network is trained offline using unsupervised learning and deployed online for real-time prediction. The uplink transmission in an IRS-aided cell-free MIMO system is investigated in Ref.26 where the central processing unit (CPU) only has statistical channel state information (CSI) to detect symbols and design receiver filter coefficients, power allocations and IRS phase shifts. Statistics show that channel estimation cost reductions allow statistical CSI to outperform instantaneous CSI for moderate to large IRS components. The study in Ref.27 investigates IRS deployment in a cell-free MIMO network with multiple BSs assisting users through IRS links. They jointly optimize IRS on/off modes, passive beamforming and BS transmit beamforming to balance data rate and power consumption for maximum energy efficiency. An aerial IRS-aided cell-free network is investigated in Ref.28 that enhances capacity and coverage by jointly optimising BS active beamforming, IRS passive beamforming and unmanned aerial vehicle (UAV) positioning to maximize weighted user rates. Simulation results demonstrate substantial gains in weighted transmission rate and coverage over existing benchmarks. Using an IRS-assisted cell-free MIMO system with statistical CSI, the authors in Ref.29 design long-term IRS passive beamformers and optimized short-term AP precoding together with long-term power allocation to enhance system performance. The study in Ref.30 investigates a hardware-impaired uplink IRS-assisted cell-free massive MIMO system under imperfect CSI. The joint optimization schemes for IRS phase shifts and power control are designed for maximum achievable rate. An IRS-assisted network with an intelligent transmitting surface (ITS) is investigated in Ref.31. It explores the jointly optimized active beamforming, ITS and IRS passive beam patterns using Lagrange dual and quadratic transformations combined with an alternating optimization framework. For an IRS-assisted downlink NOMA system, a deep deterministic policy gradient (DDPG) based algorithm is proposed in Ref.32 to jointly optimize IRS phase shifts, power allocation and user pairing parameters. The work in Ref.33 considers a RIS-assisted cell-free MIMO downlink system. Using a successive quadratic transform (QT) and particle swarm optimization (PSO), power allocation and RIS phase shifts are jointly optimized. The spectral efficiency is derived for the considered system model.
Table 1 presents the comparative analysis of the above mentioned related studies with quantitative evaluation, advantages, limitations and key outcomes.
Contributions of the work
The increasing number of devices and the subsequent data traffic growth has raised the demand for efficient communication support. However, the poor coverage at the edges owing to unfavorable wireless environment is the main challenge in dense user environments. This paper exploits the advantages of next generation technologies, namely cell-free massive MIMO and IRS along with NOMA based power domain multiplexing to overcome these drawbacks. The main contributions of this paper are as follows :
-
A unified communication framework utilizing cell-free massive MIMO aided with IRSs is proposed. Power domain multiplexing is enabled using NOMA technique to serve multiple users simultaneously. Multiple distributed APs and IRSs jointly shape the propagation environment.
-
IRSs extend the network coverage to edges by controlled reflection. Two methods for IRS phase optimization, namely, alternating optimization (AO)-Method 1 and semidefinite relaxation (SDR)- Method 2 are presented for maximum system achievable rate. The methods are compared for convergence and computational complexity.
-
An access point selection algorithm (APSA) is proposed that limits the number of active APs per user by assigning a subset of APs to each user against all APs. This reduces the resource and energy overhead. The convergence behavior and computational complexity analysis of Algorithm 1 is also carried out.
-
The system is evaluated for maximum performance with different IRS elements, IRS phase shift designs and transmit power for varied user locations.
-
The performance of the unified framework is compared with conventional massive MIMO system with existing baseline selection approaches, namely, random AP selection and No AP selection for different IRS phase shift designs.
-
A use case scenario of the proposed framework for road surveillance and traffic monitoring is presented.
-
In the end, the practical constraints and future directions are discussed.
Notations: Lower case italic letters (e.g. m, k, l) represent variables, lower case boldface letters (e.g. \(\textbf{h}\), \(\textbf{r}\)) represent vectors, upper case italic letters (e.g. M, L, K) are constants, and upper case boldface letters (e.g. G) denote matrices. The operators \(|.|^2\), \((.)^H\), \((.)^*\) and \((.)^T\) respectively stand for the squared magnitude, hermitian, conjugate and transpose of a vector or matrix. \(\mathscr {R}(.)\) and \(\arg (.)\) gives the real part and phase (angle) of a complex entity. Also, diag (x), x being an \(N \times 1\) vector, is an \(N \times N\) diagonal matrix with x being its diagonal elements. Given a matrix with dimension of \(L \times L\), e.g. \(V \in \mathbb {C}^{L \times L}\), rank(V), Tr(V), and \(V_{ij}\) respectively stand for the rank of this matrix, its trace and the \((i,j)^{th}\) entry of V. A random vector with complex normal distribution is denoted by \(r \sim \mathscr {C}\mathscr {N}(v, \sum )\) where v and \(\sum\) are its mean and covariance matrix.

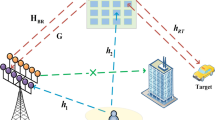
System model for IRS-aided cell-free massive MIMO serving NOMA users.
System model
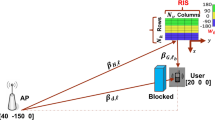
This section presents the communication system model as shown in Fig. 1. A cell-free massive MIMO system is considered in which M distributed APs, each equipped with \(N_t\) antennas, simultaneously serve K single-antenna users using NOMA. The APs are connected to a CPU via backhaul or fronthaul links. To improve signal quality and coverage, multiple IRSs are deployed in the system, each equipped with L passive reflecting elements, capable of independently adjusting the phase of incident signals.
Let \(\textbf{h}_{mk} \in \mathbb {C}^{N_t \times 1}\) represents the direct channel between the \(m^{th}\) AP and the \(k^{th}\) user modeled as Rayleigh fading channel. The IRS-assisted links modeled as Rician fading channels use two components, the channel from the \(m^{th}\) AP to the IRS, denoted by \(\textbf{G}_m \in \mathbb {C}^{L \times N_t}\), and the channel from the IRS to the \(k^{th}\) user, denoted by \(\textbf{r}_k \in \mathbb {C}^{L \times 1}\). The IRS applies a diagonal phase shift matrix \({\varvec{\Phi }} = \text {diag}(e^{j\theta _1}, \dots , e^{j\theta _L}) \in \mathbb {C}^{L \times L}\), where each \(\theta _l \in [0, 2\pi )\) is the phase shift of the \(l^{th}\) reflecting element. The composite channel from the \(m^{th}\) AP to the \(k^{th}\) user, including both direct and IRS-reflected components, is expressed as
where
with \(\beta _{mk}=\left( \frac{d_{mk}}{d_{0}} \right) ^{-\rho _{\textrm{AU}}}\) denoting the large-scale fading coefficient with reference distance \(d_0\) and path loss exponent \(\rho _{AU}\) of the AP-user link, \(\textbf{g}_{mk}\) models small-scale Rayleigh fading. Also,
\(\beta _{m}^{\textrm{AI}} = \left( \frac{d_{m}^{\textrm{AI}}}{d_{0}} \right) ^{-\rho _{\textrm{AI}}}\) with path loss exponent \(\rho _{AI}\) of the AP-IRS link, \(\kappa _{m}^{\textrm{AI}}\) is the Rician K-factor, \(\textbf{G}_{m}^{\textrm{LOS}}\) is the LoS component and \(\textbf{G}_{m}^{\textrm{NLOS}} \sim \mathscr{C}\mathscr{N}\left( \textbf{0}, \textbf{I}\right)\) is the NLOS component.
\(\beta _{k}^{\textrm{IU}} = \left( \frac{d_{k}^{\textrm{IU}}}{d_{0}} \right) ^{-\rho _{\textrm{IU}}}\) with path loss exponent \(\rho _{IU}\) of the IRS-user link, \(\kappa _{k}^{\textrm{IU}}\) is the Rician K-factor, \(\textbf{r}_{k}^{\textrm{LOS}}\) is the LoS component and \(\textbf{r}_{k}^{\textrm{NLOS}} \sim \mathscr{C}\mathscr{N}\left( \textbf{0}, \textbf{I}\right)\) is the NLOS component.
In the NOMA transmission scheme, each AP transmits a superposition of multiple user signals. The transmit signal from the \(m^{th}\) AP is
where \(\textbf{w}_{mk} \in \mathbb {C}^{N_t \times 1}\) is the beamforming vector for user k at AP m, \(p_k\) is the power allocated to user k, \(s_k\) is the data symbol for user k, with \(\mathbb {E}[|s_k|^2] = 1\). The received signal at user k is
where \(n_k \sim \mathscr{C}\mathscr{N}(0, \sigma ^2)\) is the additive white Gaussian noise.
In a NOMA group, users are ordered by their effective channel gains, and the stronger user performs SIC to decode and remove the weaker user’s signal before decoding its own. Assuming user i decodes the signal of user j, the signal-to-interference-plus-noise ratio (SINR) for user i to decode user j’s signal is
After SIC, the final SINR for user k is
The achievable rate for user k is then
IRS phase shift optimization
The phase shifts induced by the IRS elements determine whether the signals add up constructively or destructively at the receiver. The phase shift optimization is essential for maximum system performance. This section presents the two methods for phase shift optimization as follows:
Method 1: alternating optimization (AO)
This method iteratively updates each IRS element phase shift in closed form by fixing other variables, resulting in low computational complexity and fast convergence, but it converges to a local optimum30,33.
Let us define the phase shift vector \(\varvec{v} = [\phi _1, \phi _2, \dots , \phi _L]\), with \(\phi _l = e^{j\theta _l}\) which is optimized so as to maximize the system sum rate as
The effective channel from all APs to user k is
Isolating the IRS-dependent term gives
where \(z_{lmk} = r_{kl}^* \left[ \textbf{G}_m \textbf{w}_{mk} \right] _l.\) The total contribution from IRS is
The goal is to choose each \(\theta _l\) to maximize \(|S_k^{\text {IRS}} + D_k|^2\), where \(D_k\) is the known sum of the direct path and fixed IRS contributions.
This leads to the sub-problem for each phase \(\theta _l\) as
Defining \(c = \sum _{i \ne l} e^{j\theta _i} z_i + D_k\), Eq. (16) becomes
To maximize the magnitude, choose
Update each \(\theta _l\) iteratively while keeping the rest fixed, repeating until convergence.
Method 2: semidefinite relaxation (SDR)
This method relaxes the non-convex rank-one constraint into a convex semidefinite program (SDP) solved using numerical solver like CVX (CVX is a MATLAB-based software package used to model and solve convex optimization problems by expressing them in a disciplined convex programming (DCP) framework. It automatically transforms high-level mathematical formulations into standard convex solvers, making optimization problems easier to implement and analyze) providing a globally optimal solution to the relaxed problem29,34
Let us define the IRS phase vector \(\varvec{v} = [e^{j\theta _1}, \ldots , e^{j\theta _L}]^T \in \mathbb {C}^L\), and IRS phase matrix \({\varvec{\Phi }} = \text {diag}(\varvec{v})\).
Assuming beamforming and power allocations are fixed, the part of the received signal that depends on IRS phase shifts is isolated as
where \(\textbf{a}_k \in \mathbb {C}^{L \times 1}\) captures the IRS-related gain for user k, \(c_k \in \mathbb {C}\) is the combined contribution from the direct path and fixed IRS phase shifts. Then
Let \(\textbf{Q}_k = \textbf{a}_k \textbf{a}_k^H, \quad \textbf{q}_k = c_k^* \textbf{a}_k\)
The optimization becomes
Now define \(\textbf{V} = \varvec{v} \varvec{v}^H\), which satisfies \(\textbf{V} \succeq 0\), \(\text {rank}(\textbf{V}) = 1\), \(\textbf{V}_{ll} = 1\).
Then the optimization is rewritten as
Since the rank constraint is non-convex, we solve
This is a convex SDP, solvable using numerical solvers CVX.
Once the optimal \(\textbf{V}^\star\) is found, it is generally not rank-1. Gaussian randomization is used to recover a feasible \(\varvec{v}\). Initially, random samples \(\varvec{v}_r \sim \mathscr{C}\mathscr{N}(0, \textbf{V}^\star )\) are generated which are then normalized \(\hat{v}_{r,l} = e^{j\arg (v_{r,l})}\). The objective for each \(\hat{\varvec{v}}_r\) is evaluated to select the best one.
Convergence and complexity analysis
AO method optimizes IRS phase shifts iteratively, guaranteeing monotonic improvement. It converges to a local optimum not global. Convergence is usually fast and stable. Moreover, it has low complexity. While SDR method converts the non-convex IRS phase optimization into a SDP problem by relaxing rank constraints. It solves the relaxed problem using convex optimization methods and provides an upper bound. If rank-1 solution is obtained, a global optimum solution is possible. If not rank-1, it requires randomization, giving approximate solutions. SDR converges in few solver iterations, but each iteration is computationally heavy.
The comparative analysis is presented in Table 2. On the basis of the comparative analysis, it is found that Method-1 has low complexity and faster convergence, thus, Method-1 is used in the proposed AP selection algorithm discussed in the next section.
Proposed access point selection algorithm (APSA)
In a cell-free massive MIMO system utilizing NOMA, efficient access point selection (AS) is crucial to reduce interference, and enhance spectral efficiency. Rather than all APs serving all users, each user is served by a subset of APs.
The selection process begins by evaluating the large-scale channel gain between each AP m and user k, denoted by \(\gamma _{mk} = \Vert \textbf{h}_{mk}\Vert ^2\). An AP m is considered eligible to serve user k if \(\gamma _{mk} \ge \Gamma _{\text {th}}\), where \(\Gamma _{\text {th}}\) is a predefined threshold such that \(\Gamma _{\text {th}}= \xi \cdot \max _{m} \gamma _{mk}\) with \(\xi =0.3\). Based on this criterion, a binary selection matrix \(a_{mk}\) is defined, where \(a_{mk} = 1\) if AP m serves user k, and \(a_{mk} = 0\) otherwise.
For each user, the set of serving APs is denoted as \(\mathscr {M}_k = \{ m \,|\, a_{mk} = 1 \}\), and for each AP, the set of its associated users is denoted as \(\mathscr {K}_m = \{ k \,|\, a_{mk} = 1 \}\). To maintain the NOMA structure, each AP forms user pairs based on the difference in their channel gains, ensuring that one user has a significantly stronger channel than the other. Specifically, a valid NOMA pair \((k_1, k_2) \in \mathscr {K}_m\) must satisfy the channel gain ratio condition \(\frac{\gamma _{mk_1}}{\gamma _{mk_2}} \ge \Delta _{\text {NOMA}}\), where \(k_1\) is designated as the strong user and \(\Delta _{\text {NOMA}}\) is a threshold ensuring reliable SIC decoding. Once the user association is established, the effective channels \(\textbf{h}_{mk}^{\text {eff}}(t) = \textbf{h}_{mk} + \textbf{r}_k^H \text {diag}(\varvec{v}^{(t)}) \textbf{G}_m\) are calculated which are then used to design AP-specific beamforming vectors subject to individual power constraints. The IRS phase shifts are optimized iteratively using AO approach to enhance the overall signal strength at the users. The algorithm proceeds in an iterative fashion, alternating between beamforming optimization and IRS tuning until convergence is reached. The steps of the algorithm are presented in Algorithm 1.
Convergence analysis
Algorithm 1 follows an alternating optimization framework in which the beamforming design and IRS phase shift optimization are updated iteratively while keeping the remaining variables fixed. In each iteration, the objective function, the achievable sum rate, is non-decreasing. Specifically, the beamforming optimization step maximizes the instantaneous rate under fixed IRS phase shifts, while the IRS phase update aligns the reflected signals constructively to improve the effective channel gain. Since the achievable sum rate is upper-bounded by the system power and bandwidth constraints, the iterative updates guarantee convergence to a locally optimal solution. Furthermore, the IRS phase update admits a closed-form solution for each reflecting element, ensuring stable and monotonic improvement without oscillations. Algorithm 1 converges within a few iterations demonstrating both stability and computational efficiency.

APSA.
Computational complexity
The overall computational complexity of Algorithm 1 is dominated by the AP selection, beamforming optimization, and IRS phase shift updates performed iteratively until convergence. The AP selection stage requires \(\mathscr {O}(MK)\) operations to evaluate large-scale channel gains between all M APs and K users. The beamforming and power allocation step at each AP involves solving a convex optimization problem over its associated user set, with worst-case complexity on the order of \(\mathscr {O}(\sum _{m=1}^M |\mathscr {K}_m|^3\)), where \(|\mathscr {K}_m|\) denotes the number of users served by AP m. The IRS phase shift update using AO incurs a complexity of \(\mathscr {O}(LMK)\), as each of the L reflecting elements aggregates contributions from all active AP–user pairs. Therefore, for T outer iterations, the total complexity scales as \(\mathscr {O}\!\left( T\left( MK + \sum _{m=1}^{M} |\mathscr {K}_m|^{3} + LMK\right) \right)\) which grows linearly with the number of IRS elements and users, while remaining manageable due to the proposed AP selection that limits \(\mathscr {K}_m\) and reduces practical computational burden. The computational complexity comparison of proposed approach with relevant prior works is presented in Table 3.
Results and discussion
This section presents the simulation results obtained using MATLAB for the unified communication framework involving IRS-aided cell-free massive MIMO system with NOMA based multiplexing defined in Sect. “Related works". The simulation setup considers a geographical area spanning over 1 Km x 1 Km. The APs with average height \(h_m\) are distributed in the square region to assist the user communication. Four IRSs are strategically deployed at (500, 0)m, (500,1000)m, (0, 500)m and (1000, 500)m respectively. These IRSs assist in enhancing coverage, especially for NLOS users. The user nodes are randomly distributed in the simulation environment at an average height \(h_a\) above ground plane. The simulation averages the performance over \(10^4\) random realizations. All system parameters used in the simulation are detailed in Table 4.

SINR performance of cell-center and cell-edge users with different AS approaches.

Data rate performance under different phase optimization methods and different AS schemes.
Figure 2 illustrates the variation of SINR in dB as a function of the number of IRS elements for both cell-center and cell-edge users in an IRS-aided cell-free massive MIMO system powered with NOMA. The graph compares the performance of AS strategies, namely proposed AS and random AS. The performance comparison with system not incorporating any AP selection, denoted as No AS is also presented. As the number of IRS elements increases from 100 to 500, a clear improvement in SINR is observed across all methods and user positions. The proposed AS method consistently achieves the highest SINR values, demonstrating its effectiveness in optimizing link quality. In contrast, the No AS method performs the worst due to its inability to adapt to channel conditions. It is observed that at L=500, the proposed AS achieves SINR of 20 dB for cell-center users and 12.4 dB for cell-edge users. The system without any AP selection (No AS case) lags behind in SINR at 16 dB and 10 dB for cell-center and cell-edge users respectively. Cell-center users maintain higher SINR throughout, benefiting from closer proximity to APs and possibly better LOS paths. However, the application of more IRS elements helps reduce the SINR disparity between the two user groups, particularly when the proposed AS is used. This figure clearly demonstrates that both the number of IRS elements and the AP selection strategy significantly affect system performance for diverse user locations.
The impact of IRS phase shift optimization on the data rate performance of the system is depicted in Fig. 3. The two phase shift optimization methods defined in Sect. “IRS phase shift optimization", Method-1 and Method-2 are evaluated. For each method, the performance is evaluated under three AP selection strategies, Proposed AS, Random AS and No AS. With Method-1, the highest data rate of 7 Gbps is achieved with L = 500 using proposed AS approach while Method-2 peaks at 5.2 Gbps under the same conditions. This suggests that Method-1 is more efficient resulting in enhancing channel conditions through smart reflection. The results also reveal that the Proposed AS outperforms both Random and No AS strategies across all L counts. It is observed that using Method-1 there is a data rate gain of 16.6% with proposed AS over random AS approach. Also, there is an improvement of 5.26% in data rate with Random AS over No AS.
Figure 4 presents the system power consumption (in Watts) under three different AS strategies, namely No AS, Random AS and Proposed AS. The analysis is conducted for both cell-edge and cell-center users, and for two different numbers of IRS elements: L = 100 (black bars) and L = 400 (red bars). From the figure, it is evident that power consumption varies depending on both the location of the user (edge or center) and the number of IRS elements. For all three strategies, systems with 400 IRS elements consistently consume less power than those with only 100 elements, owing to improved energy efficiency and better signal reflection capability at higher IRS element densities. Among the AS strategies, No AS approach enabling no AP selection results in the highest power consumption due to all APs being active. More active APs contribute to more complexity and power overhead. In contrast, the proposed AS approach that enables selection of particular AP sets for particular user groups consume least power. Notably, cell-edge users consistently show higher power requirements than cell-center users under every configuration, highlighting the energy cost of maintaining reliable communication at the network boundary.

Power consumption under different AS strategies for cell-edge and cell-center users under varied L.
Figure 5 illustrates the comparison of data rate for both cell-free massive MIMO and conventional massive MIMO systems. The performance is evaluated under two transmit power levels, 10 dB and 20 dB for users located at the cell-center and at the cell-edge. With increasing L, the data rate improves significantly across all configurations. Cell-free massive MIMO outperforms massive MIMO consistently due to better spatial diversity, distributed APs and closer proximity to users. It is observed that the data rate achieved by a cell-edge user improves by 48% in cell-free configuration as compared to conventional massive MIMO system configuration. This demonstrates the ability of distributed APs with IRS support to combat path loss and improve coverage at the cell boundary. Additionally, higher transmit power yields higher data rates. The results reveal that increasing the transmit power to 20dB from 10 dB yields a gain of 11.9% in the data rate achieved by cell-edge user node.

Comparison of data rate under different system configurations for varied P and user locations.

Channel Gain for optimized and random phase shifts using Method 1 and Method 2.

Rate gain comparison for different system configurations.
The impact of IRS phase shift on the channel gain is presented in Fig. 6. For varied L, the two methods (Method 1 and Method 2) are compared under optimized and random phase shift conditions. Across all configurations, channel gain improves with the number of IRS elements, validating that a higher number of IRS elements enhances signal reflection and improves communication performance. Among the methods, optimized phase shifts consistently outperform random phase shifts, indicating the importance of intelligent IRS configuration. Additionally, Method 1 yields higher channel gain than Method 2 in both random and optimized scenarios, demonstrating its superior efficiency in leveraging IRS for signal enhancement. Notably, with 300 IRS elements, Method 1 with optimized phase shift achieves the highest gain of 9.2 dB, followed by 8.5 dB achieved with Method 2 with optimized phase shift. The lowest gain of 6 dB is observed in Method 2 with random phase shift, underscoring the suboptimal nature of non-optimized configurations.

Convergence comparison of Method-1 and Method-2.

Convergence behaviour of Algorithm 1.
Figure 7 presents the rate gain comparison of different system configurations. It is observed that the conventional massive MIMO system36 has the least data rate. The proposed system incorporating cell-free massive MIMO and IRS technology along with NOMA power multiplexing and proposed AP selection approach yields the highest data rate. Table 5 gives the comparative performance analysis of proposed work with relevant existing works (Since these existing works use different bandwidths and setups, the values are expressed in typical normalized ranges).
Figure 8 compares the convergence behaviour of the two IRS phase shift optimization strategies, namely Method-1 and Method-2. It is observed that Method-1 converges faster (8-10 iterations) and attains a higher data rate compared to Method-2. This is because Method-1 directly aligns the IRS phase shifts to maximize the instantaneous received signal power, whereas Method-2 relies on semidefinite relaxation and randomization, which incurs additional approximation loss. Both methods exhibit stable and monotonic convergence. Figure 9 shows the convergence plot of Algorithm 1 that utilises Method-1 for the IRS phase optimization step.
Use case scenario of IRS-NOMA aided cell-free massive MIMO in road surveillance and traffic monitoring
Consider a scenario of a busy highway with large number of vehicles which passes through semi-urban and urban areas as shown in Fig. 10. There are number of road side units (RSUs) fitted with cameras and sensors. The UAVS or drones are used for capturing aerial traffic views. The activities on the highway, vehicle movement, over speeding, accident detection, congestion management, vehicle identification are being captured by the UAVs equipped with cameras. The onboard units and sensors on the vehicles enable vehicle-to-infrastructure (V2I) communication. The data collected by the vehicles, RSUs and UAVs are processed and sent to the cloud at the control server. A number of distributed APs are placed at intervals along the highway to ensure full-area coverage without cell boundaries. The cell-free architecture eliminates handover issues between APs, which is critical for maintaining uninterrupted communication with high-mobility vehicles. To provide communication support to users in the dead zones or weaker coverage/shadowed regions, IRSs are strategically deployed at signboards or lampposts. The IRS passive reflecting elements reflect and reroute signals blocked due to obstacles including trees, vehicles, buildings. Thus, the wireless propagation environment can be controlled in real-time enhancing the signal-to-noise ratio (SNR) for both static and mobile surveillance units, such as patrol vehicles and drones. This adaptability allows seamless data transmission even in adverse weather conditions or during peak traffic hours. By incorporating NOMA, the system efficiently serves multiple road users and surveillance devices simultaneously over the same frequency band by leveraging power domain multiplexing. This enables high-resolution real-time video streams from roadside cameras, autonomous vehicles, and sensor nodes to be transmitted with low latency and high reliability. The synergy between IRS, cell-free massive MIMO and NOMA also enables prioritized access to critical surveillance data. For example, in emergency situations, the system can dynamically allocate more power and bandwidth to police or ambulance communication without disrupting the connectivity of less critical services. This combination supports robust communication links even in fast-changing road environments, ensuring continuous monitoring for traffic violations, accident detection, congestion management, and autonomous vehicle coordination, ultimately enhancing public safety and intelligent transport infrastructure. Overall, this advanced wireless setup ensures a high-capacity, reliable and intelligent road surveillance network, paving the way for smarter cities and safer transportation systems.

Use case scenario in road surveillance and traffic monitoring.
Limitations and future directions
Practical constraints/limitations
-
The proposed IRS-aided cell-free massive MIMO system requires accurate CSI estimation and synchronization among distributed APs, which increases signaling overhead and fronthaul complexity.
-
Deployment of multiple IRS panels and distributed APs involves hardware cost, phase noise, hardware impairments and real-time computational burden for AO-based optimization.
-
SDR-based optimization and large IRS element sizes (L up to 500) may lead to high computational complexity and scalability limitations in real-time implementation.
Future directions
-
Integration of low-complexity machine learning based phase optimization to reduce computational burden and enable real-time adaptive IRS control.
-
Investigation of hardware-impaired and imperfect CSI scenarios for more realistic system modeling and robust optimization design.
-
Extension toward 6G use cases such as UAV-assisted networks, vehicle-to-everything (V2X) communication and THz-band IRS deployments for ultra-reliable low-latency applications.
Conclusion
To overcome the challenges of poor coverage at the edges in dense user communication systems, this paper presents a unified communication framework integrating cell-free massive MIMO and IRS technology using NOMA technique. The advantages include low AP transmit power owing to user proximity to distributed APs, reduced inter-cell interference and enhanced edge coverage. The paper investigates two IRS phase shift optimization methods. It is observed that Method-1 has lower complexity and faster convergence. Further, using Method-1, the paper proposes an APSA algorithm to allocate a set of APs with user nodes for reduced energy and resource overhead. This limits the number of active APs per user. It is observed that the proposed AS approach improves the SINR by 2.4 dB and 4 dB for cell-edge and cell-center users respectively. The performance comparison with baseline AS approaches reveals that proposed AS achieves a data rate gain of 16.6% with Method-1 over random AS approach. Also, No AS approach results in the highest power consumption due to all APs being active. Further, the system comparison shows that proposed system framework outperforms the conventional massive MIMO system. A data rate gain of 11.9% is achieved by cell-edge user node as the transmit power varies from 10 dB to 20 dB. In the end, it is presented that the proposed framework finds usage in road surveillance and traffic monitoring, resulting in intelligent transportation system. The signaling overhead owing to imperfect CSI is the main limitation of this work. Future work can focus on machine learning based approaches that accounts for CSI uncertainty and fast varying channels to support real-time scalability.
Data availability
The data that supports the findings of this study is available within the article.
Abbreviations
- 5G:
-
Fifth generation
- AO :
-
Alternating optimization
- AP:
-
Access point
- AS:
-
AP selection
- APSA:
-
Access point selection algorithm
- BS:
-
Base station
- CSI:
-
Channel state information
- CPU:
-
Central processing unit
- MIMO:
-
Multiple input multiple output
- IoT:
-
Internet-of-Things
- IRS:
-
Intelligent reflecting surfaces
- LOS:
-
Line-of-sight
- LDT:
-
Lagrange dual transformation
- NLOS:
-
Non-line-of-sight
- NOMA:
-
Non-orthogonal multiple access
- QoS:
-
Quality-of-service
- RSUs:
-
Roadside units
- SDR:
-
Semidefinite relaxation
- SDP:
-
Semidefinite program
- SNR:
-
Signal-to-noise ratio
- SINR:
-
Signal-to-interference-plus-noise ratio
- SIC:
-
Successive interference cancellation
- UAV:
-
Unmanned aerial vehicle
- V2I:
-
Vehicle-to-infrastructure
- WSR:
-
Weighted sum rate
References
Shen, J. et al. On the performance of RSMA-IRS-aided cell-free massive mimo systems under finite blocklength. IEEE Trans. Veh. Technol. 74, 17220 (2025).
Ngo, H. Q., Interdonato, G., Larsson, E. G., Caire, G. & Andrews, J. G. Ultradense cell-free massive mimo for 6g: Technical overview and open questions. Proc. IEEE 112, 805 (2024).
Apiyo, A. & Izydorczyk, J. A survey of noma-aided cell-free massive mimo systems. Electronics 13, 231 (2024).
Wu, Q., Zhou, X. & Schober, R. IRS-assisted wireless powered NOMA: Do we really need different phase shifts in DL and UL?. IEEE Wirel. Commun. Lett. 10, 1493–1497 (2021).
Shi, E. et al. Joint AP-UE association and precoding for sim-aided cell-free massive MIMO systems. IEEE Trans. Wireless Commun. 24, 5352–5367. https://doi.org/10.1109/TWC.2025.3546927 (2025).
Jana, M. & Kumar, S. Performance analysis of IRS-assist wireless communication system with Alamouti transmit diversity scheme. AEU-Int. J. Electron. Commun. 171, 154878 (2023).
Kang, Z., You, C. & Zhang, R. Active-IRS-aided wireless communication: Fundamentals, designs and open issues. IEEE Wirel. Commun. 31, 368–374 (2024).
Hamid, H. & Begh, G. IRS assisted UAV communications for 6g networks: A systematic literature review. Wireless Netw. 31, 779–807 (2025).
Taneja, A., Alqahtani, A. & Alqahtani, N. Energy aware resource association in RIS assisted VLC-RF communication network. PLoS ONE 20, e0327467 (2025).
Zhang, Z., Liu, H., Gong, S., Dai, H. & Xing, C. Hardware-impaired beamforming optimization for cooperative double-IRS aided wireless communications. IEEE Trans. Veh. Technol. 73, 12213–12218 (2024).
Fang, Y. et al. Multi-IRS-enabled integrated sensing and communications. IEEE Trans. Commun. 72, 5853–5867 (2024).
Rahim, M., Nguyen, T. L., Kaddoum, G. & Do, T. N. Multi-IRS-aided terahertz networks: Channel modeling and user association with imperfect CSI. IEEE Open J. Commun. Soc. 5, 836–855. https://doi.org/10.1109/OJCOMS.2024.3353173 (2024).
Taneja, A., Alqahtani, N. & Alqahtani, A. Optimized IRS-aided UAV communication for 6g networks with phase and user association control. IEEE Access 13, 161311 (2025).
Xu, J. et al. IRS-UAV assisted secure integrated sensing and communication. IEEE Wirel. Commun. 31, 61–67. https://doi.org/10.1109/MWC.013.2300252 (2024).
You, C., Kang, Z., Zeng, Y. & Zhang, R. Enabling smart reflection in integrated air-ground wireless network: IRS meets UAV. IEEE Wirel. Commun. 28, 138–144 (2022).
Gao, Y., Wu, Q. & Chen, W. IRS-aided multi-antenna wireless powered communications in interference channels. IEEE Trans. Veh. Technol. 73, 17899 (2024).
Yu, X., Xu, D. & Schober, R. Miso wireless communication systems via intelligent reflecting surfaces. In 2019 IEEE/CIC International Conference on Communications in China (ICCC), 735–740 (IEEE, 2019).
Vishwakarma, P., Sur, S. N., Dhar, S. & Bhattacharjee, D. Irs-assisted swipt: Power optimization strategies for green communications. In 2025 17th International Conference on COMmunication Systems and NETworks (COMSNETS), 356–364 (IEEE, 2025).
Peng, Q. et al. Hybrid active-passive IRS assisted energy-efficient wireless communication. IEEE Commun. Lett. 27, 2202–2206 (2023).
Gong, S. et al. Toward smart wireless communications via intelligent reflecting surfaces: A contemporary survey. IEEE Commun. Surv. Tutor. 22, 2283–2314 (2020).
Li, Z. et al. Robust beamforming design and time allocation for IRS-assisted wireless powered communication networks. IEEE Trans. Commun. 70, 2838–2852 (2022).
Van Chien, T., Ngo, H. Q., Chatzinotas, S., Di Renzo, M. & Ottersten, B. Reconfigurable intelligent surface-assisted cell-free massive MIMO systems over spatially-correlated channels. IEEE Trans. Wirel. Commun. 21, 5106–5128. https://doi.org/10.1109/TWC.2021.3136925 (2022).
Zhang, Y. et al. Beyond cell-free MIMO: Energy efficient reconfigurable intelligent surface aided cell-free MIMO communications. IEEE Trans. Cogn. Commun. Netw. 7, 412–426. https://doi.org/10.1109/TCCN.2021.3058683 (2021).
Chen, C., Xu, S., Zhang, J. & Zhang, J. A distributed machine learning-based approach for IRS-enhanced cell-free MIMO networks. IEEE Trans. Wirel. Commun. 23, 5287–5298. https://doi.org/10.1109/TWC.2023.3325772 (2024).
Jin, S.-N., Yue, D.-W., Chen, Y.-L. & Hu, Q. Energy efficiency maximization in IRS-aided cell-free massive MIMO system. IEEE Wirel. Commun. Lett. 12, 1652–1656. https://doi.org/10.1109/LWC.2023.3276868 (2023).
Nadeem, Q.-U.-A., Zappone, A. & Chaaban, A. Achievable rate analysis and max-min SINR optimization in intelligent reflecting surface assisted cell-free MIMO uplink. IEEE Open J. Commun. Soc. 3, 1295–1322. https://doi.org/10.1109/OJCOMS.2022.3195978 (2022).
Liu, H. et al. Network deployment with energy efficiency optimization in IRS-assisted cell-free MIMO system. Phys. Commun. 63, 102287 (2024).
Song, X. et al. Enhancing cell-free network: Joint beamforming and location optimization via UAV-IRS. IEEE Trans. Veh. Technol. 74, 1196–1208. https://doi.org/10.1109/TVT.2024.3466519 (2025).
Noh, T. & Choi, J. Cell-free MIMO systems powered by intelligent reflecting surfaces. IEEE Commun. Lett. 26, 1076–1080. https://doi.org/10.1109/LCOMM.2022.3152616 (2022).
Zhang, Y., Zhao, H., Xia, W., Yang, L. & Zhu, H. Rate analysis and optimization of IRS-aided hardware-impaired cell-free massive MIMO systems under correlated ricean fading channels. IEEE Trans. Veh. Technol. 73, 12126–12131. https://doi.org/10.1109/TVT.2024.3369682 (2024).
Chu, Z. et al. Joint its- and IRS-assisted cell-free networks. IEEE Wirel. Commun. Lett. 13, 859–863. https://doi.org/10.1109/LWC.2023.3347555 (2024).
Chakraborty, M., Sharma, E., Suraweera, H. A. & Quoc Ngo, H. Analysis and optimization of RIS-assisted cell-free massive MIMO noma systems. IEEE Trans. Commun. 73, 2631–2647. https://doi.org/10.1109/TCOMM.2024.3464410 (2025).
Dang, X.-T., Nguyen, H. V. & Shin, O.-S. Optimization of IRS-NOMA-assisted cell-free massive MIMO systems using deep reinforcement learning. IEEE Access 11, 94402–94414. https://doi.org/10.1109/ACCESS.2023.3310283 (2023).
Li, S. et al. Cell-free massive MIMO-NOMA systems with nonreciprocal channels: Performance analysis and calibration method design. IEEE Syst. J. 18, 1729–1740 (2024).
Hao, C. et al. Joint user association and power control for cell-free massive MIMO. IEEE Internet Things J. 11, 15823–15841. https://doi.org/10.1109/JIOT.2024.3351633 (2024).
Khan, R. et al. An effective algorithm in uplink massive MIMO systems for pilot decontamination. Results Eng. 21, 101873 (2024).
Acknowledgements
This work is supported by the Deanship of Scientific Research, Vice Presidency for Graduate Studies and Scientific Research, King Faisal University, Saudi Arabia [Grant No. KFU260570].
Author information
Authors and Affiliations
Contributions
S.S. and A.T. : Conceptualization, methodology, writing original draft, N.A. and A.A. : Formal analysis, review, Supervision, Resources, Funding.
Corresponding author
Ethics declarations
Competing interests
The authors declare no competing interests.
Additional information
Publisher’s note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution-NonCommercial-NoDerivatives 4.0 International License, which permits any non-commercial use, sharing, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if you modified the licensed material. You do not have permission under this licence to share adapted material derived from this article or parts of it. The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by-nc-nd/4.0/.
About this article

Cite this article
Shrivastava, S., Taneja, A., Alqahtani, N. et al. Integrated approach for edge coverage enhancement based on IRS phase shift control and AP selection in dense user communication system. Sci Rep 16, 14339 (2026). https://doi.org/10.1038/s41598-026-44807-8
Received:
Accepted:
Published:
Version of record:
DOI: https://doi.org/10.1038/s41598-026-44807-8
