
Abstract
Magnetic nanorobot swarms hold great promise for biomedicine application, but transporting them over long distances in hash environments often leads to significant swarm losses, posing a significant challenge for their practical applications. Here we show a multi-step “carriers-to-swarms” strategy to protect and transport these nanorobot swarms to tumor sites. Upon reaching the target area, the carriers break down to release the nanorobots, which then form swarms that can penetrate deeply into tumors. The nanorobots are designed to combine heat generation and drug releasing when activated by near-infrared irradiation, allowing precise and effective chemo-photothermal therapy. Our results demonstrate that this strategy significantly improves targeted cancer cell killing by combining photothermal treatment and chemotherapy, overcoming previous challenges in transporting nanorobot swarms. This study presents a multi-stage strategy to address the practical challenges of using nanorobot swarms for target therapy, specifically addressing the issue of swarm loss over long distances in harsh environments to maximize the effectiveness of swarm-based chemo-photothermal therapy, thereby advancing the realistic application of nanorobot swarms.
Similar content being viewed by others

Introduction
Magnetically actuated nanorobots (MNRs) are widely recognized for their potential in biomedical applications1,2. Inspired by natural swarming phenomena—such as ant colonies and bee swarms—researchers introduced the concept of swarm control for MNRs3,4. Compared to individual MNRs, swarms offer advantages such as enhanced delivery efficiency, improved imaging contrast, higher task completion efficiency, and greater carrying capacity5,6,7. Swarms of tens to millions of MNRs are capable of performing a wide variety of functions, such as micromanipulation8,9,10,11 and the detection of pH12, temperature13, viscosity, and ionic strength14, Additionally, their ability to deform and penetrate deeply into target areas enhances their effectiveness in various biomedical tasks, including drug delivery15,16, thermotherapy17,18,19, clot20,21 and biofilm22 removal, selectively embolizing blood vessels23, enhancing bioimaging24, and reconstructing vascular networks25. In contrast to the movement of single MNRs, the movement of swarms necessitates additional consideration of swarm stability, which extends beyond mere mobility and navigation capabilities. However, due to the diminutive scale of MNRs, the precise control of swarm behaviors becomes significantly more complex26,27, leading to a propensity for instability in complex environments with adverse flow and rough surface2. If the swarm stability is compromised, a large number of MNRs may be lost during long-distance traversal through complex environments. For in vivo applications, MNRs may become trapped in healthy organs or remain lodged within blood vessels en route to the targeted diseased area7, which can adversely affect treatment efficacy and potentially result in negative side effects. Wang et al. mentioned that high-motion precision inevitably compromises the delivery range and targeting velocity28, which renders whole-body scale navigation of microrobots time-consuming and may be more evident for swarm movement as the swarm needs to be stable throughout the whole targeting process. Therefore, improving the stability and mobility of MNR swarms is crucial to ensure that a greater number of MNRs can successfully reach the target area.
For the realistic applications of MNR swarms in targeted cancer therapies, both long- and short-range targeting must be considered29,30. The swarms need to be guided over a long range from the injection close to the cancer region. After reaching the peri-tumoral region, the swarms need to move within a short range of the cancer cells to carry out treatment efficiently. MNR swarms are ideal for short-range targeting, as their small size allows them to infiltrate the intra-tumoral region, while magnetic guidance significantly enhances their penetration capabilities. However, long-range targeting is often complicated by the harsh environment of the body, including the various physiological conditions and biological barriers, which can disrupt the stability of swarms, leading to significant swarm loss and making it difficult to move quickly and remain stable over long distances. For instance, Yu et al. conducted a review of the stability of swarms in various environments and discovered that in vivo swarms exhibit weak interactions and display unstable (free) patterns31. Thus, enhancing swarm stability and mobility during long-range targeting is a major challenge. Wang et al. proposed utilizing self-assembled constituent clusters in a dynamic magnetic field, demonstrating their stability in countercurrent motion17,32. Law et al. developed a model aimed at maintaining swarm integrity in fluidic flow33. In addition, various research teams also explored automatic control strategies to enhance the swarm’s capabilities, including deformation, obstacle avoidance, and more34,35,36,37. A fast feedback response is required when adjusting the control parameters in complex environments; otherwise, the swarm may be out of equilibrium and break down38. This places high demands on the imaging and control systems26. However, while the dynamic nature of swarms makes them highly adaptable, it also exposes them to vulnerabilities from external disturbances, which can restrict their effectiveness in harsh environments. For this reason, most experiments are carried out on ideal, smooth, planar surfaces. Keeping the swarm stable while moving on other surfaces may be more challenging3. Consequently, previous attempts to stabilize swarms have only alleviated some of these stability issues, but they have not fully resolved the underlying challenges. As for other alternative strategies, a high-frequency and high-field-strength rotating magnetic field may be employed to aggregate the nanorobots before the swarm begins to move, thereby greatly enhancing stability in challenging flow conditions and biofluids39. However, this approach fundamentally compromises the swarm’s inherent dynamic and adaptive characteristics, which can negatively impact the effectiveness of deep penetration during short-range targeting. A pregathering strategy can also be used to congregate the nanoparticles before experiments; however, this only guarantees a high concentration of particles at the start, but does not consider the loss of particles during long-range targeting31,33. The combination of magnetic and acoustic fields has also been shown to improve the mobility and stability of swarms, but composite fields also increase the difficulty of control40. Thus, a viable solution is to implement a strategy that facilitates the rapid transportation of swarms, addressing the instability during long-range targeting while maintaining dynamic adaptability for short-range targeting.
In this study, as shown in Figure 1, a multi-stage “carriers-to-swarms” targeting strategy is proposed for the utilization of magnetic nanorobot swarm carriers (MNR-SCs) to transport MNR swarms to the target areas, effectively addressing the challenges of swarm loss and drug leakage during long-range targeting. In the first stage, the MNR-SCs carry MNRs over long distances through complex environments, getting into the closed range of the target before releasing the MNRs via biodegradation. In the second stage, MNRs are organized into swarms using a rotating magnetic field (RMF) for short-range targeting deep within the target region, enabling the effective delivery of near-infrared light (NIR)-triggered chemo-photothermal therapy. This strategy was inspired by red ants forming living rafts to minimize individual loss during floods41; similarly, MNR-SCs protect MNRs to prevent swarm loss during long-range targeting. The MNR-SCs were fabricated from biodegradable calcium alginate, loaded with MNRs modified with 4,4′-azobis(4-cyanovaleric acid) (AZO), and conjugated with doxorubicin (DOX) for NIR-triggered chemo-photothermal therapy. The MNR-SCs exhibited robust movement capabilities in experiments, effectively protecting the encapsulated drug-loaded MNRs from dispersion during long-distance transit across different terrains. Upon nearing the target area, the MNR-SCs underwent chemically and mechanically enhanced degradation to release the MNRs. The released MNRs can be further controlled by an RMF to organize into swarms, enabling short-range targeting and deep penetration into the target area. The MNR swarms can be NIR-triggered to locally heat up to high temperatures while simultaneously facilitating the release of DOX, enabling chemo-photothermal synergistic therapy that effectively kills cancer cells in in vitro experiments. Notably, the results indicate that no MNRs were lost en route to the target, successfully demonstrating the effectiveness of the carrier-to-swarm strategy in overcoming the challenges associated with both long- and short-range targeting using MNR swarm.

Schematic illustration of the magnetic motion control, ultrasound imaging, degradation, and NIR-trigger chemo-photothermal therapy of MNR-SCs and MNRs. Conceptual illustration of the MNR-SC advancing to the target position under ultrasound imaging guidance and the motion of MNR swarms after the degradation of the MNR-SC, demonstrating its application in near-infrared-responsive chemo-photothermal therapy. The schematic was created using Adobe Illustrator.
Results
Fabrication of MNRs and MNR-SCs
The fabrication process comprises two parts: The fabrication of MNRs and MNR-SCs. MNRs are chemically modified with AZO and DOX, as illustrated in Fig. 2a. AZO, which possesses NIR-responsive photothermal properties and generates heat when illuminated at specific wavelengths42, was mixed with amino-modified MNRs (NH2-Fe3O4, 800 nm in diameter) and coupling agent (EDC and NHS) to facilitate the loading of AZO onto the MNRs. After washing, the modified MNRs were mixed with a DOX solution, allowing the N-H2 groups on DOX to bond with the free-COOH groups on the AZO linkers, which resulted in a DOX loading capacity of 9.8 μg/mg on the MNRs. The coupling of AZO and DOX is achieved through the action of a coupling agent, which causes the amino group and the carboxyl group to react and form an amide bond (details in Supplementary Note 3). The surface potential of MNRs at each stage is shown in Supplementary Fig. 2.This is a simple, cost-effective process with high throughput. SEM and TEM images, FT-IR spectra results, and the hysteresis loops of the MNRs are shown in Supplementary Fig. 3, Supplementary Fig. 4, and Supplementary Fig. 5, respectively. The MNRs are paramagnetic with strong saturation magnetization values, establishing the foundation for magnetic actuation and swarm control. The hydrodynamic size of MNRs is relatively uniform and stable in different media (Supplementary Fig. 6 and Supplementary Fig. 7). Subsequently, these modified MNRs are encapsulated in a gel matrix using a centrifugal droplet-based method to form MNR-SCs.

a Chemical loading of AZO and DOX onto the surface of MNRs. b Droplet microfluidic method for fabricating the MNR-SC with encapsulated MNRs. c Bright-field image of the MNR-SCs. The scale bar is 100 μm. d Images of test tubes before and after centrifugation. e Size distribution of the MNR-SCs (n = 100).
MNR-SCs are biodegradable carriers encapsulating MNRs. A sodium alginate solution was thoroughly mixed with the MNRs obtained from the previous steps, as depicted in Fig. 2b. This mixture is then introduced into a calcium chloride solution dropwise using a centrifugal droplet method. Upon contact, the sodium alginate droplet rapidly crosslinked with calcium chloride, forming calcium alginate with high biocompatibility while embedding the MNRs to create MNR-SCs, as shown on the micrographs in Fig. 2c. The reaction mechanism of calcium chloride and sodium alginate solutions can be found in Supplementary Note 3. The centrifuge tubes before and after centrifugation are shown on the photographs in Fig. 2d, demonstrating that a high yield can be achieved in a single centrifugation step. Finite element simulations of this process are provided in Supplementary Fig. 8. The diameter distribution of the MNR-SCs is presented on the histogram in Fig. 2e, where measurements of 100 MNR-SCs reveal an excellent uniformity in the shape and size, with most diameters ranging from 300 to 320 μm and the highest count around 310 μm. The size of the MNR-SC can be adjusted by changing the centrifuge speed, as shown in Supplementary Fig. 9. Larger MNR-SCs, approximately 2 mm in diameter, can also be obtained by manually pushing the syringe to drop the sodium alginate solution into the calcium chloride solution. Disk-shaped MNR-SCs can be obtained by applying magnetic force using a permanent magnet or by placing the MNR-SCs horizontally on a flat surface and allowing them to air-dry.
Motion control of MNR-SCs
Driven by the magnetic torque of the RMF, the MNR-SC can rotate and execute rolling motion on a surface. The RMF is expressed as
where B is the RMF to actuate the MNR-SCs, A is the amplitude of the magnetic field, ω is the angular velocity, t denotes the time, and β controls the heading angle of the MNR-SCs. When β = 0, the MNR-SC moves in the positive x direction. During steady motion at low Reynolds number, the magnetic torque, \({\tau }_{m}\), exerted on the MNR-SC counterbalances the drag torque, \({\tau }_{r}\); this is expressed as
The magnetic torque is expressed as
where \({{{\bf{m}}}}\) is the dipole moment of the MNR-SC and \(\alpha\) is the phase lag between the B and \({{{\bf{m}}}}\). The hydrodynamic torque due to rotational motion under Stokes approximation is
where \(\eta\) is the dynamic viscosity, \({{{\rm{M}}}}\) is the rotational resistance tensor, and \({{{\boldsymbol{\Omega }}}}\) is the rotational motion. When MNR-SC rotates steadily at the step-out frequency, the relationship can be expressed as
From Eq. (4), it is evident that if the MNR-SC maintains a steady rotation, the drag torque will increase with an increase in the rotation frequency. Therefore, to maintain the equilibrium as described in Eq. (2), an increase in drag torque necessitates a corresponding increase in magnetic field strength to enhance the magnetic torque. However, in the experiments, when the magnetic field strength is held constant while the rotation frequency is increased, the rotational posture of the MNR-SC changes to maintain steady motion, which results in a decrease in \({{{\rm{M}}}}\) from Eq. (5). This phenomenon was analogous to previous studies of magnetically driven helical micro-robots, rollers, and achiral swimmers43,44,45,46. As shown in Fig. 3a and Supplementary Movie 1, the MNR-SC exhibits a tumbling posture under an RMF of frequency <8 Hz. By keeping the magnetic field strength constant and gradually increasing the frequency of the RMF, the rotation axis of the MNR-SC will change, leading to a transition to rolling motion at high frequencies. The computational fluid dynamics (CFD) simulations of the tumbling and rolling modes of the MNR-SC are shown in Fig. 3b. The CFD model was used to calculate the total force for the two modes at various frequencies (Supplementary Fig. 11). The propulsion forces in the direction of motion were compared for the rolling and tumbling movements of MNR-SC under the same conditions. It was found that tumbling motion provides greater propulsion force (Supplementary Fig. 11). The stress distribution of the MNR-SC with different rotational axes is shown in Supplementary Fig. 13, Supplementary Fig. 14, and Supplementary Movie 2.

a Schematic diagram and experiment images of the tumbling, rolling, and transition states of MNR-SCs. The scale bar is 3 mm. b 2D CFD simulation of the two modes of motion at 10 Hz. c The relationship between the frequency of the RMF and the velocity of the MNR-SC (n = 3). d Multiple MNR-SCs move collectively toward the target area. The scale bar is 6 mm.
The relationship between the velocity of the MNR-SC and the RMF frequency under constant strength is illustrated in Fig. 3c. The MNR-SC exhibited tumbling at low frequencies and transitioned into rolling at higher frequencies. During the transition state, the MNR-SC wobbles. The velocity-to-frequency ratio (VFR) of the MNR-SC for tumbling, transition, and rolling are ~1.2, 1.0, and 1.4, respectively. The lower VFR during the transitional state may be due to the smaller effective radius during wobbling, which is defined as the center of rotation to the surface on which the MNR-SC rolled. The VFR for tumbling and rolling are similar due to having the same effective radius. Despite the change in states, the velocity of the MNR-SC continued to increase with rising rotating frequency. The MNR-SCs demonstrated similar performance on rough polylactic acid (PLA), smooth glass, and jelly surfaces, demonstrating their versatility (Supplementary Fig. 10). The MNR-SCs also demonstrated a strong capability for upstream movement. Under 5 mT and 16 Hz, the MNR-SC was able to move against an average flow velocity of 3 mm/s or more within a 3 mm diameter tube (Supplementary Fig. 17).
Multiple MNR-SCs can move together to reach the target area without minimal disturbance to one another. Several MNR-SCs were initially positioned in the upper chamber, where they commenced synchronized movement. They were subsequently controlled via an RMF to navigate the narrow passageway, executing a 90-degree turn before finally reaching the target area. The entire process is shown in Fig. 3d and Supplementary Movie 2. Throughout the movement, each MNR-SC maintained consistent speed and direction, demonstrating the feasibility of simultaneously controlling multiple MNR-SCs to complete tasks. In addition, many MNR-SCs can organize into cohesive swarms under a rotating permanent magnet (Supplementary Fig. 18).
The MNR-SCs also demonstrated exceptional performance on complex motion terrains. Under a low-frequency external RMF, the representative MNR-SC was able to climb stairs and then consecutively overcame obstacles with heights of 250 µm using tumbling motion, as depicted in Fig. 4a. However, when confronted with a 100 µm-wide narrow channel, MNR-SCs could not pass through with tumbling motion. By increasing the external RMF frequency, the MNR-SC switched to a rolling motion, allowing it to successfully traverse the narrow channel, as shown in Fig. 4b. It should be noted that the MNR-SC exhibited a reduction in movement speed within the narrow channel; this was primarily attributed to collisions and friction with the channel walls, which impeding motion. MNR-SCs also exhibited a remarkable ability to climb inclined planes. The MNR-SC ascended a slope with a gradient of up to 40° using tumbling motion, as shown in Fig. 4c. The corresponding videos of the MNR-SCs overcoming the obstacle, climbing the slope, and passing through the narrow tunnel are shown in Supplementary Movie 3. As demonstrated by these experiments, the exceptional mobility and versatility of MNR-SCs in switching between different movement modes enabled them to effectively navigate various obstacles while stably transporting the MNRs.

a The MNR-SC continuously climbed over obstacles using tumbling motion. The scale bar is 1.5 mm. b The MNR-SC transitioned to rolling mode to go through a narrow channel. The scale bar is 1.5 mm. c The MNR-SC climbed a slope with a gradient of 40°. The scale bar is 3 mm.
The degradation of MNR-SC
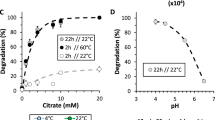
During application, the biocompatible calcium alginate that composed the body of the MNR-SCs degrades and releases MNRs after reaching the vicinity of the target area, as depicted in the schematic diagram in Fig. 5a. The released MNRs can then form a vortex shape and move deeper into the interior of target area under the control of an RMF and perform NIR-triggered localized chemo-thermotherapy from within in target. When the MNR-SCs encounter a citrate or alkaline environment, their calcium alginate bodies degrade more rapidly47. The degradation process of the MNR-SC was observed under a microscope, as shown in Fig.5b and Supplementary Movie 4. After adding 0.3 mL of a 2% (w/v) sodium citrate solution, the MNR-SC gradually swelled at t = 60 s due to the gradual degradation of the calcium alginate matrix. Concurrently, the internal MNRs were progressively released. As the reaction continues, it can be observed that the calcium alginate was degraded entirely at t = 130 s, resulting in the full release of the MNRs. The degradation of MNR-SCs is also accelerated in alkaline environments. The mechanisms of accelerated degradation in sodium citrate or alkaline environments are shown in the Supplementary Note 3. The degradation process can also be mechanically accelerated by applying RMF. When RMF drives the rotation of MNR-SC, it enhances convective motion on its surface, thereby increasing the rate of degradation by accelerating the contact between MNR-SC and reactants48.

a Diagram of the degradation of an MNR-SC, swarm motion of MNRs, and their stimulus-response function. The red dots represent DOX. b Microscopic images of MNR-SC degradation into MNRs, along with the swarm control and dispersion of MNRs. The scale bar is 250 μm. c Ultrasonic imaging showing the degradation and dispersion of the MNR-SC. The scale bar is 500 μm. d Overview of the advantage of using the carrier-to-swarm strategy for long-range targeting over single microrobots or MNR swarms. e The process of an MNR-SC approaching the target, undergoing degradation, and the subsequent swarm control of MNRs to penetrate deep inside the target. The scale bar is 500 μm.
Swarm motion of MNRs
To form and maneuver a vortex-shaped MNR swarm, an RMF was applied in the x-y plane. By adjusting the pitch, θ, and yaw, α, angles of the RMF, the speed and direction of the swarm can be precisely controlled. The RMF can be expressed as
A demonstration of swarm control following degradation is presented in the time interval from 162 s to 292 s, as shown in Fig. 5b and Supplementary Movie 4. At t = 162 s, the MNRs formed a stable vortex-like swarm under the actuation of an RMF applied in the x-y plane, which corresponds to setting \(\theta\) = 0 in (6). To initiate swarm movement, \(\theta\) and \(\alpha\) in Eq. (6) were adjusted to control the swarm movement speed and direction. At t = 272 s, the MNR swarm was controlled to move to the right. During movement, some MNRs were left behind along the swarm’s path. In the context of long-range targeting, this is considered swarm loss. In the context of short-range targeting, the MNRs and smaller swarms that split off can be considered favorable for coverage and distribution. At 292 s, the swarm stopped moving and slowly dispersed when the rotation of the magnetic field stopped49. When multiple MNR-SCs degraded simultaneously, their degradation processes were similar, demonstrating consistency among MNR-SCs. The released RMF-actuated swarms in close proximity to one another could also merge to form large swarms (Supplementary Movie 5).
The movement and degradation processes of MNR-SCs can also be observed under ultrasound imaging equipment (Supplementary Movie 6). The degradation process of the MNR-SC was similar to the results observed under a microscope, as shown in Fig. 5c. MNRs were continuously released from the MNR-SC, and once all the MNRs had been fully released, they dispersed to cover a significant area. The ultrasound imaging of the MNR-SC and its degradation process demonstrates the feasibility of in vivo imaging for these processes.
Using MNR-SCs to transport MNR swarms can significantly enhance the long-range targeting capability of swarms and eliminate the loss of MNRs during transit. The velocity and MNRs loss rate with or without the carrier systems were compared under different RMF frequencies, as shown in Supplemental Fig. 21 and Supplemental Fig. 22. When directly using an RMF to control MNRs, the velocity increases with increasing frequency and is significantly influenced by the pitch angle of the magnetic field rotation direction. At a pitch angle of 5°, the swarm is relatively stable, with an MNR loss rate of ~3%. However, the velocity is only about 0.43 mm/s, far below the velocity achieved when using MNR-SCs. As the pitch angle increases, the swarm’s velocity improves, peaking at 8 mm/s when the pitch angle is 90°; however, this speed remains significantly lower than the velocity of the MNR-SCs actuated at the same frequency. Additionally, at this point, MNRs experience a significant loss during movement, with a loss rate of ~40% after moving 2 cm. When moving using MNR-SC, we did not observe any loss of MNRs along the way because their calcium alginate hydrogel structure completely encapsulated the MNRs. This contrast is even more pronounced under flow conditions. Even a relatively slow flow of 1 mm/s can completely disperse the MNR swarm when the pitch angle is low, making it impossible to move against the current. At the pitch angle of 90°, MNRs can form multiple smaller swarms to move against a flow with a velocity of 2 mm/s; however, they still experienced a loss rate of ~43%.
The MNR-SCs can carry MNRs over slopes or obstacles before releasing them (Supplementary Movie 7). In contrast, directly controlling a swarm of MNRs results in significant losses, especially when moving over rough surfaces (Supplementary Movie 8). The advantages of the carrier-to-swarm method for long- and short-range targeting are highlighted in Fig. 5d. While a single, larger robot may exhibit superior mobility, its size can hinder deep penetration into tissue for effective drug delivery during short-range targeting. In contrast, using swarm control to manage drug-loaded MNRs facilitates deeper tissue penetration. However, the dynamic nature of the swarm inevitably leads to significant loss during long-range targeting due to their susceptibility to the harsh environment. These shortcomings can be addressed by using MNR-SCs to navigate complex terrain at long range and releasing MNRs in proximity to the target area at short range for tumoral penetration without loss.
To demonstrate the long- and short-range advantages, a gel block with several punctured holes was created to simulate the interstitial spaces of a tumor and then placed in a test chamber with an MNR-SC. As shown in Fig.5e and Supplementary Movie 9, the MNR-SC was initially positioned on the left side, and the gel block was positioned on the right side, representing the presumed target tissue. From 0 s to 135 s, the MNR-SC was magnetically guided to approach the target tissue and attempted to penetrate the punctured holes. However, this attempt was unsuccessful due to the size of the MNR-SC being much larger than the holes. Upon introducing a sodium citrate solution and an RMF to chemically and mechanically accelerate degradation, the MNR-SC exhibited significant swelling at 260 s, gradually releasing the MNRs until it was completely degraded. At 310 s, the MNR-SCs fully degraded and released all of the MNRs. Subsequently, the pitch angle of the RMF was adjusted at 470 s to control the MNR swarm to penetrate the punctured holes and successfully penetrate into the interior of the target area for short-range targeting. Due to the small size of MNRs and the deformability and reconfigurability of the MNR swarm, the MNRs were able to easily penetrate the holes. At 555 s, the MNRs entirely infiltrated the interior of the gel block, as shown in Supplementary Movie 10. The relationship between the penetration distance and time of MNRs under RMF drive is shown in Supplementary Fig. 23.
For MNR-SCs with larger sizes, the degradation process is prolonged due to the increased volume-to-surface-area ratio, which prevents the complete release of all MNRs simultaneously and consequently hinders the formation of a large swarm. In this situation, an RMF with a pitch angle toward the target may be employed during the gradual release of the MNRs under the prolonged degradation, facilitating the continuous formation of smaller swarms as the MNRs are released. As the small swarms are formed, they are simultaneously propelled to penetrate the target area continuously. To emphasize the necessity of utilizing RMF-actuated small swarms for penetration, an experiment was conducted in which an MNR-SC underwent prolonged degradation without an RMF. It was observed that the release MNRs, without RMF-based swarm control, remained at the degradation site of the MNR-SC and were unable to penetrate the narrow holes of the gel block through passive diffusion. This comparison, shown in Supplementary Fig. 24 and Supplementary Movie 11, serves to exemplify the effectiveness of RMF-based swarm control for short-range targeting.
Stimulus-responsive photothermal of MNRs
To verify the photothermal effect performance of the MNRs, three sample groups were compared. Group 1 is a blank control containing only deionized (DI) water. Group 2 is the unmodified MNRs (pure Fe3O4 particles). Group 3 is MNRs loaded with AZO and DOX, henceforth referred to as MNRs/AZO/DOX, with concentrations as group 2. These groups were placed in separate Petri dishes with each volume and subsequently irradiated with an 808 nm NIR (power P = 2 W/cm² and concentration C = 1 mg/mL). The thermal imaging pictures of the three groups of samples at 0 s, 100 s, 200 s, and 300 s are shown in Fig. 6a. It can be observed that there was nearly no temperature change in group 1 after irradiation. Both groups 2 and 3 showed significant temperature increases in the irradiated area, while group 3 demonstrated a significantly larger heated area and a substantially higher central temperature. The temperature profiles for the three groups are illustrated in Fig. 6b. Groups 2 and 3 reached maximum temperatures of about 47 °C and 70 °C respectively, which are sufficient to induce hyperthermia and cause cell death50. The temperature increase observed in group 2 can be attributed to the photothermal properties of the Fe3O4 particles51, while the enhanced temperature in group 3 results from the synergic photothermal effect of the Fe3O4 particles and AZO linkers52, leading to significantly greater heat generation. The temperature profiles of MNRs/AZO/DOX with different concentration (1, 0.75, 0.5, 0.25, and 1 mg/mL) under NIR with P = 2 W/cm² are shown in Fig. 6c. At the lowest and highest concentrations, the temperate reached 31.9 °C and 73.4 °C in 16 min respectively, indicating the effect of concentration on temperature generation. The temperature profiles of MNRs/AZO/DOX with C = 1 mg/mL at various laser intensities (0, 0.5, 1.0, 1.5, and 2.0 W/cm²) are shown in Fig. 6d. At the lowest and highest laser intensity, the temperature reached 48.6 °C and 73.4 °C in 16 min, indicating that hyperthermia temperature can be effectively controlled by adjusting the laser intensity. By switching on and off the NIR laser, the local temperature in the region where the MNRs are located can also be controlled to fluctuate between 43 °C and 48 °C, as shown in Fig. 6e.This has been proven to be effective in killing tumor cells53.

a Infrared thermal images of water, unmodified MNRs, and MNRs/AZO/DOX at the same concentration after NIR irradiation for 0, 100, 200, and 300 s with an 808 nm. Power of the NIR irradiation P = 2.0 W/cm2. Concentration C = 1 mg/mL. b Temperature profiles of the aforementioned samples. c Temperature profiles of MNRs/AZO/DOX with different concentrations (1, 0.75, 0.5, 0.25, and 0.1 mg/mL). P = 2.0 W/cm2. d Temperature profiles of MNRs/AZO/DOX at different laser densities (0, 0.5, 1.0, 1.5, and 2.0 W/cm2). C = 1 mg/mL. e Temperature profiles of MNRs/AZO/DOX under switching NIR on and off. C = 1 mg/mL. P = 2.0 W/cm2. f DOX release profiles of MNR-SCs, MNRs/AZO/DOX after degradation of MNR-SCs without NIR irradiation, and MNRs/AZO/DOX after degradation of MNR-SCs subjected to 5 min of NIR irradiation. Values are presented as mean ± standard deviation (SD, n = 3).
Stimulus-responsive drug release of MNRs
The MNRs/AZO/DOX can release DOX on demand upon NIR irradiation. Conjugated via AZO linkers, DOX is released when the linkers cleave in response to NIR light42,52. To investigate the NIR-triggered drug release of the MNRs/AZO/DOX right after being released from the MNR-SCs, three groups were set up. Group 1 is MNR-SCs without additional treatment, group 2 is MNR-SCs treated with sodium citrate for degradation, and group 3 is MNR-SCs degraded, followed by 5 min of NIR irradiation. The DOX content in the supernatant was measured at 1, 2, 4, 6, 8, 12, 18, and 24 h post-treatment to assess the DOX release in each group. Group 1 exhibited negligible drug release over 24 h, as shown in Fig. 6d. This shows that the MNR-SCs can effectively prevent drug release during transportation, thus minimizing harm to normal cells and maximizing the amount of drug reaching the target area. Due to the stability of the encapsulated drug, the undegraded MNR-SCs demonstrated good biocompatibility (Supplementary Fig. 25), as the calcium alginate structure prevents the release of macromolecular drugs. In contrast, group 2 released ~27% of DOX within 6 h. Notably, when NIR irradiation was applied for 5 min after degradation in group 3, the release rate of DOX significantly increased to about 65% after 6 h. The results show that while the drug on the MNRs/AZO/DOX can be released slowly after degradation, NIR stimulation can significantly enhance the drug release rate, working synergistically with hyperthermia to strengthen cytotoxicity against tumor tissue.
In vitro anticancer effects of MNRs
Mechanistically, DOX may induce DNA damage through intercalation into double-stranded DNA and inhibition of topoisomerase II54. This genomic stress activates p53-dependent pathways, ultimately triggering mitochondrial-mediated apoptosis via Bcl-2 protein dysregulation and caspase activation55,56. NIR irradiation synergistically amplifies this effect via localized photothermal ablation, enabling precise spatiotemporal control of cytotoxicity. An in vitro experiment was conducted using HeLa cells to evaluate the therapeutic efficacy of MNRs-based chemo-photothermal therapy for cancer treatment. Four groups were prepared. Group 1 is the blank control group without MNR-SCs, group 2 is MNR-SCs carrying unmodified MNRs, group 3 is MNR-SCs carrying MNRs/AZO, and group 4 is MNR-SCs carrying MNRs/AZO/DOX. The only variable among these groups was the type of MNRs used, and the preparation process remained consistent across all groups. Each group is also divided into two subgroups denoted A and B, where A is without NIR irradiation and B is with NIR irradiation. To the culture medium of groups 2, 3, and 4, 1 mL of a 2% sodium citrate solution was added to degrade the MNR-SCs and rapidly release the encapsulated MNRs. After 24 h of co-culture with HeLa cells, the B subgroups of all the groups were irradiated with an 808 nm NIR (2 W/cm²) for 5 min. Afterwards, cell viability was assessed using the CCK-8 method. The cell viability results for each group are presented in Fig. 7a.

a Cell viability of Hela cells treated with MNRs, MNRs/AZO, and MNRs/AZO/DOX with or without NIR irradiation. The sample number was n = 3. Values are presented as mean ± standard deviation (SD, n = 3). Statistical significance was calculated using Student’s t-test: *p < 0.05, **p < 0.01, and ***p < 0.001. b Corresponding fluorescent images of the cells stained with calcein-AM (live cells, green) and PI (dead cells, red). The scale bar is 200 μm.
The results indicate that the cells maintained high viability in all of the A subgroups (without NIR). Only group 4 A showed a notable decrease in viability to ~67% due to the passive release of DOX. This finding suggests that the MNRs/AZO/DOX partially released DOX to kill HeLa cells, consistent with previous DOX release experiments.
In the experiments conducted with the B subgroups (with NIR), the cell viability remained high in group 1B (control group). In group 2B, the cell viability was ~75%, likely due to the heat generated by the Fe3O4 particles, leading to the death of some of the cells. For group 3B, the cell viability significantly dropped to about 36%, demonstrating substantial cell death due to the heat generation from MNRs/AZO. In group 4B, the cell viability was around 17%, indicating that the combination of photothermal therapy and the chemotherapeutic drug release effectively killed the majority of the cells.
Live/dead staining was also performed, and the results were observed under a fluorescence microscope. The green fluorescence represents viable cells, while the red fluorescence indicates dead cells, as shown in Fig. 7b. The results clearly show that the combination of photothermal therapy and chemotherapy in group 4B led to significant cancer cell death. Significant cell death was also observed with only photothermal therapy in group 3B. In all other groups and subgroups, the inhibitory effect on cancer cells was notably lower. These results indicate that integrating localized chemo-photothermal therapy facilitated by MNRs/AZO/DOX under NIR irradiation exhibits a pronounced anti-tumor effect in vitro.
Discussion
Alginate, as a biocompatible material, has been frequently used in previous studies to fabricate micro-robots for drug57 or stem cell delivery58, demonstrating good mobility59. However, they lack the ability to penetrate deep into tissue due to their large size. In contrast, MNR swarms have the deformability to achieve deep tissue penetration for short-range targeting but lack the stability for long-range movement. In this study, a carrier-to-swarm strategy was employed to use alginate-based MNR-SCs to transport MNRs close to the target area and release them, demonstrating the potential to overcome the shortcomings of both microrobots and MNR swarms. The conditions and speed of the degradation and release of nanorobots by MNR-SCs are some of the critical factors affecting their in vivo application. In salt solutions, cations such as sodium have been shown to accelerate the degradation of calcium alginate gels by weakening the crosslink density and accelerating ion exchange. Rapid degradation and release of nanorobots can be achieved by local injection of certain solutions60, such as sodium citrate. Meanwhile, the alkaline environment in regions such as the liver, small intestine, pancreas, and cervix in the human body can also accelerate the degradation of calcium alginate gel. These areas are also potential application scenarios for MNR-SCs. Future research may consider modifying the hydrogel materials used to prepare carriers to possess photo-, thermo-, or pH-responsive degradation characteristics61,62, enabling more controllable degradation and release of MNRs within the body.
The in vitro cell experiments demonstrated the efficacy of chemo-photothermal therapy on cancer cells. However, excessive local temperatures may also damage surrounding healthy tissues. In response to this, we verified that the temperature of the target area can be controlled within an appropriate range (43 °C to 48 °C) by controlling the intensity of NIR and the concentration of MNRs. In addition, we can also functionalize the MNRs with various agents, such as palladium (Pd) or copper (Cu) single-atom nanozymes, to achieve mild photothermal therapy63,64. In addition to photothermal conversion, Fe₃O₄ magnetic nanoparticles may intrinsically initiate Fenton reactions in the tumor microenvironment, where surface-bound Fe²⁺ ions catalytically decompose tumor-elevated H₂O₂ into hydroxyl radicals (·OH) under acidic conditions65. Notably, this process occurs independently of photothermal stimulation, though localized hyperthermia during PTT could accelerate ·OH kinetics66. This synergy might mitigate thermal heterogeneity through diffusible ·OH penetration into sublethal zones combined with hyperthermia-mediated suppression of cytoprotective HSPs (e.g., HSP90)67, potentially enhancing therapeutic efficacy against tumors.
There are a few limitations of this work that are worth exploring in future work. While the carriers-to-swarms strategy offers a way to address the loss of nanorobots during long-range targeting, the released nanorobots following the degradation of MNR-SCs only utilized magnetic guidance for short-range targeting. Combining multiple methods, such as hybridization with cell membranes and modification with folic acid53,68,69,70, can enhance the biocompatibility of nanorobots and improve their targeting efficiency within a short range. Moreover, NIR has a penetration depth of about 1 cm71. thus, other stimulus-responsive materials can be explored for treatment at greater depths, such as ultrasound-triggered drug release72 and/or local hyperthermia using magnetic heat generated by alternating magnetic fields19, or the combined use of multiple stimulus-triggered methods to overcome the limitations of single stimuli. In future research, we will explore nanocomplexes with properties better suited for in vivo applications, focusing on enhanced targeting capability, improved biosafety, and increased therapeutic efficacy. Additionally, we aim to validate the feasibility of employing the carrier-to-swarm strategy at the in vivo level. This will include examining the mobility of MNR-SCs in in vivo environments and assessing the therapeutic effects of the MNRs they carry.
Conclusion
In conclusion, a carrier-to-swarm method that utilized magnetic nanorobot swarm carriers (MNR-SCs) to transport and release magnetic nanorobot (MNR) swarms close to the target area for localized thermotherapy combined with chemotherapy was reported. The main body of the MNR-SC was composed of highly biocompatible calcium alginate, which protected the internal MNR swarm and prevented swarm loss and drug leakage during long-range targeting. The MNR-SCs were prepared in large batches at a low cost through a simple centrifugal droplet method. These MNR-SCs exhibited excellent mobility, capable of wall rolling, overcoming obstacles, climbing slopes of up to 40°, and switching modes of motion to navigate through narrow channels, all under the control of an external rotating magnetic field (RMF). The MNRs inside the MNR-SCs were chemically modified with AZO and DOX. Guided by an external RMF, they could move as a cohesive swarm. Under NIR irradiation, the AZO on the surface of the MNRs cleaves, accelerating drug release while generating enough heat for hyperthermia. In vitro cell experiments verified the significant efficacy of combining chemotherapy with localized photothermal therapy compared to single therapy approaches.
Methods
Materials
The ammonium-modified Fe3O4 particles (500 nm) were purchased from J&K Chemical (972540). H1299 cancer cells and RAW264.7 cells were purchased from ATCC. RPMI 1640, fetal bovine serum (FBS), Trypsin–EDTA (0.25%), and penicillin/streptomycin were purchased from Gibco (Gibco, USA). Calcein-AM/PI Double Stain Kit (C2015S) was from Biyuntian Biotechnology (Shanghai, China). CCK-8 assay was obtained from Dojindo (Japan). Dimethyl sulfoxide (DMSO) was purchased from the Sinopharm Chemical Reagents Company. Doxorubicin hydrochloride (DOX) and 4,4′-azobis(4-cyanovaleric acid) (AZO) was purchased from Aladdin (China). Other reagents were purchased from Sigma unless otherwise noted.
Equipment
The changes in the chemical functional groups of the samples were determined using a Fourier transform infrared (FT-IR) analysis (IRAffinity-1s@SHIMADZU spectrometer) to determine the changes in the chemical functional groups of the samples. Transmission electron microscope (TEM) images were taken using the FEI Tecnai G2 F20. Scanning electron microscope (SEM) images were taken using the ZEISS Sigma 360. Dynamic light scattering (DLS) and Zeta potential data were obtained by using the Malvern instrument Zetasizer Nano system. Cell viability tests were performed using a microplate reader (Infinite 200 pro, Tecan Austria GmbH, Austria) to determine the cytotoxicity of the MNRs. A fluorescence inverted microscope (Axio Observer 5, ZEISS) was used to observe the cell morphology. The real-time temperature change and thermal images of the samples were measured with an infrared thermal imaging system (Testo 865, Germany). The concertation of DOX was determined by an ultraviolet spectrophotometer (Infinite 200 pro, Tecan Austria GmbH, Austria). The upstream experiments were done in a PVC tube 3 mm in diameter, and the flow was generated by a pump (SPLab 04, China). Hysteresis curves were measured by LakeSHore Model 7408 VSM, USA.
Preparation of MNRs
N-(3-dimethyl aminopropyl)-N′-ethyl carbodiimide hydrochloride (EDC) (5 mL, 10 mg/mL), N-Hydroxy succinimide (NHS) (5 mL, 10 mg/mL) and 0.5 g of 4,4′-azobis (4-cyanovaleric acid) (AZO) were added to the solution of amino-modified Fe3O4 in DMSO (10 mL, 10 mg /mL). After the volume of the mixture was diluted to 20 mL with DMSO, the mixture was stirred for 8 h. Fe3O4–AZO MNRs were collected using a magnet and washed several times with DMSO and distilled water. The final product was redispersed in distilled water. After that, as for the DOX loading, 1.5 mg of DOX was dissolved in 10 mL of solution containing 10 mg of as-synthesized Fe3O4–AZO MNRs, 12.5 mg of EDC, and 12.5 mg of NHS. The mixture was vigorously shaken for 24 h at room temperature. The MNRs were then collected by centrifugation and washed with water three times until the supernatant became clear. The final product was redispersed in distilled water.
Preparation of MNR-SCs
Sodium alginate (0.1 g) was added to the previously prepared MNRs solution (10 mL) and stirred thoroughly for at least 4 h to ensure complete dissolution of the sodium alginate and to form a uniform mixture. The mixture was then dispensed into a CaCl2 solution (2% w/v) using a centrifugal droplet method. The centrifuge was set to 800 rpm, and a 30 G needle (0.09 mm inner diameter, 0.25 mm outer diameter, 13 mm length) was used, with the needle tip positioned 1.5 cm above the solution surface. Upon initiating the centrifuge, the MNR-SCs were formed. After the MNR-SCs were prepared using centrifugation, they were placed in distilled water. A permanent magnet was positioned beneath the container to align the internal magnetic particles, causing the MNR-SCs to deform slightly under magnetic and gravitational forces, resulting in a more flattened, disk-like shape. An alternative method for achieving a disk-like shape involved placing the MNR-SCs horizontally on a flat surface and allowing them to air-dry. Subsequently, the MNR-SCs were immersed in a calcium chloride solution to stabilize their shape.
Motion Experiment
All MNR-SCs and MNRs were propelled by an RMF generated by a tri-axial Helmholtz coil. The flow channels for the motion test of the MNR-SCs and MNRs were fabricated using PLA material via a 3D printer (Bambu A1). The gel used as the target object for the demonstration was prepared by heating 2% (w/v) agarose to 80 °C for 2 h to ensure complete dissolution, followed by cooling to allow it to solidify. Small holes were then punctured on the surface using a needle to mimic the interstitial spaces in tumor tissues.
Degradation of MNR-SCs
Sodium alginate (0.1 g) was added to the previously prepared MNRs solution (10 mL) and stirred thoroughly for at least 4 h to ensure complete dissolution of the sodium alginate and to form a uniform mixture. For the experiments assessing the rate of MNRs release by degradation of MNR-SCs, MNR-SCs were directly added to sodium citrate solutions of different concentrations as well as phosphate solutions of different pH values.
The photothermal effect of MNRs
In the photothermal tests, 3 mL of the sample, with a concentration of 1 mg/mL, were placed in a 35 mm culture dish. The sample was then irradiated with an 808 nm laser. The samples were then irradiated with an 808 nm laser. The laser emitter was ~15 cm away from the samples. Simultaneously, an infrared thermal imaging system was employed to measure and record the temperature changes and thermal images of the sample in real time.
Drug loading and releasing
After the MNRs had been successfully prepared, the supernatant from the mixed reaction was collected and analyzed using an ultraviolet-visible spectrometer. The content of DOX was measured at a wavelength of λ = 480 nm and compared with the 1 mg/mL DOX solution before treatment. The DOX loading capacity of the MNRs was calculated using the following formula: Drug Loading Capacity = (mass of DOX in the initial solution - mass of DOX in the supernatant) / mass of the particles. To test the drug release rates, the samples were added to PBS solution to maintain a 1 mg/mL concentration. For the two groups of MNRs undergoing degradation treatment, 0.5 mL of 2% sodium citrate solution was added; another group was treated with an equal volume of PBS solution as a control. After 2 min of degradation, the laser treatment group was exposed to near-infrared laser radiation (2 W/cm²) for 5 min, while the other groups were not subjected to this treatment. Subsequently, the solution was centrifuged at regular intervals, and 100 µL of supernatant was removed to measure the DOX concentration using a UV-visible spectrometer at λ = 480 nm, from which the DOX release rate was calculated. After each measurement, an equal volume of PBS solution was added to the sample to maintain a constant total volume.
Cell culture
Hela cells were used to evaluate the anticancer effect of the MNRs. Briefly, cells were cultured using R1640 supplemented with 10% fetal bovine serum (FBS) at 37 °C and 5% CO2 in a humid environment. The samples were sterilized with 75% alcohol before cell seeding and placed in 96-well tissue culture plates. Then, 100 µL of cell suspension with a 1 × 104 cells/mL density was seeded onto the samples.
Cell viability test
The cell viability Kit-8 was employed to determine the cytotoxicity of the samples quantitatively. After 24 h of culture, 10% CCK-8 solution in a cell culture medium was added and incubated at 37 °C for another two h. The OD values at 450 nm were read by a multifunctional full-wavelength microplate reader.
The live/dead staining assay was performed using a Calcein-AM/PI Double Stain Kit. Cells were seeded in 96-well cell culture plates at a density of 1 × 105 cells per well. Then, different samples were added to corresponding wells. After 24 h incubation, cells were washed twice with PBS. Afterward, 100 μL Calcein-AM/PI Double Stain detection working solution was added following the manufacturer’s instructions. After 30 min incubation, cells were washed twice with PBS. Finally, the living cells stained with Calcein-AM (λex/λem = 490 nm/515 nm) and dead cells stained with PI (λex/λem = 535 nm/617 nm) were monitored by a fluorescence inverted microscope.
Computational fluid dynamics (CFD) analyses
3D and 2D simulations in COMSOL Multiphysics (COMSOL, Inc.) were used to calculate flow strength and stress acting on the MNR-SC in different rotating modes using laminar flow interface physics by solving the Navier–Stokes equations of incompressible fluid. Considering the computation time, the mesh was set to extremely fine in the 2D model and regular in the 3D model. The flow channel in the 2D model shows the flow information perpendicular to the plane of the rotation axis, and the flow channel height is 600 μm. The wall surface along the translation direction of MNR-SC was set as an open wall. In the simulation, the MNR-SC was set to have a disc-like shape with a diameter of 300 μm and a thickness of 80 μm with fillet corners. The rotation axis of the MNR-SC was set to the y-axis, passing through the center of the MNR-SC, and its different rotational attitudes were represented by changing the angle between the MNR-SC and the x-z plane. Two mesh regions were defined in the simulated environment. One was the boundary of the MNR-SC’s two-dimensional cross-section, and the other encompassed a free triangular mesh throughout the fluid space. The density and dynamic viscosity of the fluid were taken as ρ = 1.005 × 103 kg/m–3 and μ = 1 × 10–3 Pa/s. The boundary of the MNR-SC’s two-dimensional cross-section and the upper boundary of the fluid were defined as no-slip boundaries.
Data availability
The data that support the findings of this study are available from the corresponding author upon reasonable request.
References
Zhou, H., Mayorga-Martinez, C. C., Pané, S., Zhang, L. & Pumera, M. Magnetically driven micro and nanorobots. Chem. Rev. 121, 4999–5041 (2021).
Jiang, J., Yang, L. & Zhang, L. An overview of micro/nanorobot swarm control: from fundamental understanding to autonomy. IEEE/ASME Trans. Mechatron. 30, 1–17 (2024).
Yang, L. et al. A survey on swarm microrobotics. IEEE Trans. Robot. 38, 1531–1551 (2022).
Xie, H. et al. Reconfigurable magnetic microrobot swarm: multimode transformation, locomotion, and manipulation. Sci. Robot. 4, eaav8006 (2019).
Lu, L. et al. Design and control of the magnetically actuated micro/nanorobot swarm toward biomedical applications. Adv. Healthc. Mater. 13, 2400414 (2024).
Wang, Q. & Zhang, L. External power-driven microrobotic swarm: from fundamental understanding to imaging-guided delivery. ACS Nano. 15, 149–174 (2021).
Chen, H., Zhang, H., Xu, T. & Yu, J. An overview of micronanoswarms for biomedical applications. ACS Nano 15, 15625–15644 (2021).
Gardi, G., Ceron, S., Wang, W., Petersen, K. & Sitti, M. Microrobot collectives with reconfigurable morphologies, behaviors, and functions. Nat. Commun. 13, 2239 (2022).
Yu, J., Wang, B., Du, X., Wang, Q. & Zhang, L. Ultra-extensible ribbon-like magnetic microswarm. Nat. Commun. 9, 3260 (2018).
Xu, Z. & Xu, Q. Collective behaviors of magnetic microparticle swarms: from dexterous tentacles to reconfigurable carpets. ACS Nano. 16, 13728–13739 (2022).
Jiang, J. et al. Automated microrobotic manipulation using reconfigurable magnetic microswarms. IEEE Trans. Robot. 40, 3676–3694 (2024).
Yu, Z. et al. Swarming magnetic photonic-crystal microrobots with on-the-fly visual pH detection and self-regulated drug delivery. InfoMat 5, e12464 (2023).
Liu, J. et al. Swarming multifunctional heater–thermometer nanorobots for precise feedback hyperthermia delivery. ACS Nano 17, 16731–16742 (2023).
Chen, H., Wang, Y., Liu, Y., Zou, Q. & Yu, J. Sensing of fluidic features using colloidal microswarms. ACS Nano. 16, 16281–16291 (2022).
Jin, D. et al. Domino reaction encoded heterogeneous colloidal microswarm with on-demand morphological adaptability. Adv. Mater. 33, 2100070 (2021).
Cao, C. et al. Harnessing disparities in magnetic microswarms: from construction to collaborative tasks. Adv. Sci. 11, 2401711 (2024).
Wang, L. et al. Reconfigurable vortex-like paramagnetic nanoparticle swarm with upstream motility and high body-length ratio velocity. Research 6, 0088 (2023).
Ji, Y. et al. Biocompatible ferrofluid-based millirobot for tumor photothermal therapy in near-infrared-ii window. Adv. Healthc. Mater. 13, 2302395 (2024).
Wang, B. et al. Reconfigurable swarms of ferromagnetic colloids for enhanced local hyperthermia. Adv. Funct. Mater. 28, 1705701 (2018).
Wang, Q. et al. Rapid blood clot removal via remote delamination and magnetization of clot debris. Adv. Sci. 12, 2415305 (2025).
Yang, T. et al. Breaking the limitation of laminar flow in thrombolytic therapy with reconfigurable vortex-like nanobot swarms. Angew. Chem. Int. Ed. 64, e202425189 (2025).
Dong, Y. et al. Magnetic microswarm composed of porous nanocatalysts for targeted elimination of biofilm occlusion. ACS Nano 15, 5056–5067 (2021).
Jin, D. et al. Swarming self-adhesive microgels enabled aneurysm on-demand embolization in physiological blood flow. Sci. Adv. 9, eadf9278 (2023).
Wang, Q. et al. Tracking and navigation of a microswarm under laser speckle contrast imaging for targeted delivery. Sci. Robot. 9, eadh1978 (2024).
Du, X. et al. Active exploration and reconstruction of vascular networks using microrobot swarms. Nat. Mach. Intell. 7, 553–564 (2025).
Yang, L. et al. Machine learning for micro- and nanorobots. Nat. Mach. Intell. 6, 605–618 (2024).
Liu, Y. et al. Automatic navigation of microswarms for dynamic obstacle avoidance. IEEE Trans. Robot. 39, 2770–2785 (2023).
Wang, B. et al. Endoscopy-assisted magnetic navigation of biohybrid soft microrobots with rapid endoluminal delivery and imaging. Sci. Robot 6, eabd2813 (2021).
Schmidt, C. K., Medina-Sánchez, M., Edmondson, R. J. & Schmidt, O. G. Engineering microrobots for targeted cancer therapies from a medical perspective. Nat. Commun. 11, 5618 (2020).
Medina-Sánchez, M. & Schmidt, O. G. Medical microbots need better imaging and control. Nature 545, 406–408 (2017).
Yu, J. et al. Active generation and magnetic actuation of microrobotic swarms in bio-fluids. Nat. Commun. 10, 5631 (2019).
Wang, L., Gan, C., Sun, H. & Feng, L. Magnetic nanoparticle swarm with upstream motility and peritumor blood vessel crossing ability. Nanoscale 15, 14227–14237 (2023).
Law, J., Du, X., Tang, W., Yu, J. & Sun, Y. Navigation of magnetic microrobotic swarms with maintained structural integrity in fluidic flow. IEEE/ASME Trans. Mechatron. 29, 74–84 (2024).
Cao, H., Xing, L., Hu, J., Mo, H. & Sun, D. Automated control of microparticle swarm in a rotating gradient-based magnetic field. IEEE Trans. Autom. Sci. Eng. 22, 2946–2955 (2025).
Yang, L. et al. Autonomous environment-adaptive microrobot swarm navigation enabled by deep learning-based real-time distribution planning. Nat. Mach. Intell. 4, 480–493 (2022).
Yu, J. et al. Adaptive pattern and motion control of magnetic microrobotic swarms. IEEE Trans. Robot. 38, 1552–1570 (2022).
Zou, Q. et al. Dynamic path planning and motion control of microrobotic swarms for mobile target tracking. IEEE Trans. Autom. Sci. Eng. 20, 2454–2468 (2023).
Law, J. et al. Micro/nanorobotic swarms: from fundamentals to functionalities. ACS Nano 17, 12971–12999 (2023).
Yue, H., Chang, X., Liu, J., Zhou, D. & Li, L. Wheel-like magnetic-driven microswarm with a band-aid imitation for patching up microscale intestinal perforation. ACS Appl. Mater. Interfaces 14, 8743–8752 (2022).
Ahmed, D. et al. Bioinspired acousto-magnetic microswarm robots with upstream motility. Nat. Mach. Intell. 3, 116–124 (2021).
Mlot, N. J., Tovey, C. A. & Hu, D. L. Fire ants self-assemble into waterproof rafts to survive floods. Proc. Natl. Acad. Sci. USA 108, 7669–7673 (2011).
Chen, L. et al. Azo-functionalized Fe3O4 nanoparticles: a near-infrared light triggered drug delivery system for combined therapy of cancer with low toxicity. J. Mater. Chem. B. 4, 3660–3669 (2016).
Tottori, S. et al. Magnetic helical micromachines: fabrication, controlled swimming, and cargo transport. Adv. Mater. 24, 811–816 (2012).
Kei Cheang, U., Lee, K., Julius, A. A. & Kim, M. J. Multiple-robot drug delivery strategy through coordinated teams of microswimmers. Appl. Phys. Lett. 105, 083705 (2014).
Chen, Z. et al. Propulsion of magnetically actuated achiral planar microswimmers in Newtonian and non-Newtonian fluids. Sci. Rep. 11, 21190 (2021).
Wang, H. et al. Multimode microdimer robot for crossing tissue morphological barrier. iScience 26, 108320 (2023).
Ching, S. H., Bansal, N. & Bhandari, B. Alginate gel particles–A review of production techniques and physical properties. Crit. Rev. Food Sci. Nutr. 57, 1133–1152 (2017).
Cheng, D. & Chen, F. Forced convection mass transfer from a rotating rigid spherical particle in laminar flows. Chem. Eng. Sci. 290, 119834 (2024).
Yu, J., Xu, T., Lu, Z., Vong, C. I. & Zhang, L. On-demand disassembly of paramagnetic nanoparticle chains for microrobotic cargo delivery. IEEE Trans. Robot. 33, 1213–1225 (2017).
Liu, J. et al. Imaging and therapeutic applications of persistent luminescence nanomaterials. Adv. Drug Deliv. Rev. 138, 193–210 (2019).
Estelrich, J. & Busquets, M. A. Iron oxide nanoparticles in photothermal therapy. Molecules 23, 1567 (2018).
Song, X. et al. Magnetic tri-bead microrobot assisted near-infrared triggered combined photothermal and chemotherapy of cancer cells. Sci. Rep. 11, 7907 (2021).
Prasad, R. et al. Bioinspired and biomimetic cancer-cell-derived membrane nanovesicles for preclinical tumor-targeted nanotheranostics. Cell Rep. Phys. Sci. 4, 101648 (2023).
Porazzi, P. et al. Targeting chemotherapy to decondensed H3K27me3-marked chromatin of AML cells enhances leukemia suppression. Cancer Res 82, 458–471 (2022).
Chen, Z. et al. Pathologic stimulus determines lineage commitment of cardiac C-kit+ cells. Circulation 136, 2359–2372 (2017).
Ismail, M. B., Rajendran, P., AbuZahra, H. M. & Veeraraghavan, V. P. Mangiferin inhibits apoptosis in doxorubicin-induced vascular endothelial cells via the Nrf2 signaling pathway. Int. J. Mol. Sci. 22, 4259 (2021).
Chen, X., Wang, X., Pan, T., Mao, L. & Wang, H. Highly flexible magnesium–calcium alginate dense hydrogel manufactured by soft spray for drug loading. ACS Appl. Polym. Mater. 6, 5070–5079 (2024).
Thomas, R. G. et al. Electromagnetic manipulation enabled calcium alginate Janus microsphere for targeted delivery of mesenchymal stem cells. Int. J. Biol. Macromol. 110, 465–471 (2018).
Chen, W., Sun, M., Fan, X. & Xie, H. Magnetic/pH-sensitive double-layer microrobots for drug delivery and sustained release. Appl. Mater. Today 19, 100583 (2020).
Chen, H. et al. Active microgel particle swarms for intrabronchial targeted delivery. Sci. Adv 11, eadr3356 (2025).
Li, J. & Mooney, D. J. Designing hydrogels for controlled drug delivery. Nat. Rev. Mater. 1, 16071 (2016).
Kanamala, M., Wilson, W. R., Yang, M., Palmer, B. D. & Wu, Z. Mechanisms and biomaterials in pH-responsive tumour targeted drug delivery: a review. Biomaterials 85, 152–167 (2016).
Chang, M. et al. Single-atom Pd nanozyme for ferroptosis-boosted mild-temperature photothermal therapy. Angew. Chem. Int. Ed. 60, 12971–12979 (2021).
Chang, M. et al. Cu single atom nanozyme based high-efficiency mild photothermal therapy through cellular metabolic. Regulation Angew. Chem. Int. Ed. 61, e202209245 (2022).
Hu, Z. et al. NIR-actuated ferroptosis nanomotor for enhanced tumor penetration and therapy. Adv. Mater. 36, e2412227 (2024).
Zhang, X. et al. Bimetallic nanozymes-integrated parachute-like Au2Pt@PMO@ICG janus nanomotor with dual propulsion for enhanced tumor penetration and synergistic PTT/PDT/CDT cancer therapy. Adv. Funct. Mater. 34, 2406059 (2024).
Cen, D. et al. A near-infrared light-responsive ROS cascade nanoplatform for synergistic therapy potentiating antitumor immune responses. Adv. Funct. Mater. 33, 2211402 (2023).
Prasad, R. et al. Graphene oxide supported liposomes as red emissive theranostics for phototriggered tissue visualization and tumor regression. ACS Appl. Bio. Mater 2, 3312–3320 (2019).
Prasad, R. et al. Long-term cell-membrane-coated ultrabright nanospheres for targeted cancer cell imaging and hydrophobic drug delivery. Chem. Mater. 37, 845–856 (2025).
Song, X. et al. Hybrid membrane biomimetic photothermal nanorobots for enhanced chemodynamic-chemotherapy-immunotherapy. ACS Appl. Mater. Interfaces 17, 5784–5798 (2025).
Wang, L. et al. Dual-functional laser-guided magnetic nanorobot collectives against gravity for on-demand thermo-chemotherapy of peritoneal metastasis. Adv. Healthc. Mater. 13, 2303361 (2024).
Boissenot, T., Bordat, A., Fattal, E. & Tsapis, N. Ultrasound-triggered drug delivery for cancer treatment using drug delivery systems: From theoretical considerations to practical applications. J. Controlled Release 241, 144–163 (2016).
Acknowledgements
This research was funded by the Natural Science Foundation of China (52375569), the Department of Science and Technology of Guangdong Province (2024TQ08Z703), the Guangdong Basic and Applied Basic Research Foundation (2023A1515012229), and the Science and Technology Innovation Committee Foundation of Shenzhen (JCYJ20250604144219025, RCYX20210609103644015, and JCYJ20240813094921029). The authors acknowledge the assistance of the SUSTech Core Research Facilities. The authors extend their gratitude to Scientific Compass (www.shiyanjia.com) for providing invaluable assistance with the TEM analysis.
Author information
Authors and Affiliations
Contributions
Z.L. and U.K.C. conceived the ideas. Z.L. performed most of the experiments, data analysis, and wrote the manuscript. J.Z., A.G., and L.F. assisted in the simulation part, X.S., T.Y., and D.L. assisted in the fabrication and characterization, D.L. and Z.S. assisted in the motion control experiments, and U.K.C. supervised the project, reviewed the manuscript, and finalized the manuscript.
Corresponding author
Ethics declarations
Competing interests
The authors declare no competing interests.
Peer review
Peer review information
Communications Materials thanks Rajendra Prasad, Yanlin Zhu, Mengyu Chang and the other, anonymous, reviewer(s) for their contribution to the peer review of this work. A peer review file is available.
Additional information
Publisher’s note Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Supplementary information
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution-NonCommercial-NoDerivatives 4.0 International License, which permits any non-commercial use, sharing, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if you modified the licensed material. You do not have permission under this licence to share adapted material derived from this article or parts of it. The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by-nc-nd/4.0/.
About this article

Cite this article
Li, Z., Song, X., Wei, T. et al. Minimizing nanorobot swarm loss for near-infrared-responsive chemo-photothermal therapy. Commun Mater 6, 273 (2025). https://doi.org/10.1038/s43246-025-00989-8
Received:
Accepted:
Published:
Version of record:
DOI: https://doi.org/10.1038/s43246-025-00989-8
