
Abstract
The 2023 Türkiye earthquake doublet, which includes two MW > 7.5 events, was the most devastating earthquake sequence globally over the past decade. Here we investigate the fault segmentations, rupture processes, radiated energy and stress releases of the doublet. Our findings reveal that the first earthquake was overall a subshear event, with local supershear ruptures that may have been induced by geometric barriers, while the second event exhibited persistent supershear ruptures on its geometrically simple segments. The difference in radiation efficiency between the two events suggests that the first event may be an undershoot event and/or that the second event may be an overshoot event. We speculate that the geometric barriers of the first event hindered the stress release, leading to rupture of more small asperities and generation of high-frequency signals. In contrast, the simpler fault geometry of the second event facilitates a larger stress drop and a more complete stress release.
Similar content being viewed by others


Introduction
An earthquake doublet or multiplet refers to a scenario in which a major earthquake triggers another earthquake or additional nearby events with comparable magnitudes1,2,3,4. The triggering distance can reach hundreds of kilometers, while the triggering time ranges from tens of seconds to several years. This complex earthquake interplay increases damage and poses challenges in assessing seismic hazards, particularly soon after the first earthquake. It was estimated that approximately 7%-75% earthquakes are doublets or multiplets using different criteria of magnitudes and spatial proximity5,6,7. Earthquake doublets or multiplets can rupture different portions of the same fault, conjugate faults, or neighboring faults. Due to variations in fault geometry or fault segmentation, these events may exhibit notable differences in physical processes and disaster mechanisms.
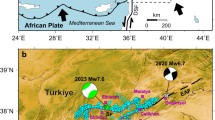
An MW 7.9 earthquake devastated southeastern Türkiye at 01:17 on 06 February 2023 (UTC time). The hypocenter determined by the Disaster and Emergency Management Presidency of Türkiye (AFAD) is at 37.288 °N, 37.043°E, with a depth of 8.6 km, and is located on the major fault of the East Anatolian Fault Zone (EAFZ) (Fig. 1). Approximately 9 hours later, another MW7.7 earthquake occurred about 100 km north of the first event. The second earthquake occurred on Sürgü–Misis fault, a northern branch of the EAFZ. This earthquake doublet caused more than 50,000 deaths and was the deadliest earthquake disaster worldwide in the past decade8. One of the most remarkable differences between the doublet is that the first event ruptured a longer fault and exhibited more complex fault segmentation9,10,11,12. Given that fault geometry is widely acknowledged as a key factor influencing the earthquake physical processes13,14,15,16, it may closely impact the source properties of this earthquake doublet.

The stars denote the epicenters. The rectangles and beach balls show the surface projections and mechanisms of the fault segments, respectively (Supplementary Table 1). The green lines represent active faults81, the gray dots represent relocated aftershocks50, and the white diamonds represent surface rupture locations82. Blue to red background shows the coseismic offsets measured from the descending track D21 of the Sentinel-1 satellite. The upper-left inset shows the regional tectonics, while the bottom-right inset displays the misfit curve varying with the average rupture velocity in the joint inversions of sub-fault moment tensors. The base map is created using GMT software102.
In this work, we first determined the low-frequency sources by constructing multiple-segment fault models and performing finite-fault inversions. Next, we retrieved the source spectra, calculated the radiation energy, and obtained the high-frequency radiation. By combining low- and high-frequency source information, we established a complete image of earthquake physical processes related to the fault geometries.
Results and Discussion
Multiple-segment Fault Model
The 2023 Türkiye earthquake doublet exhibits complex fault segmentation, necessitating the use of a multiple-segment fault model for finite-fault inversions. While fault segment strikes can be accurately determined from active faults, relocated aftershocks, geodetic deformation, and surface ruptures, previous studies have paid relatively less attention to dip angles, often assuming uniform dips for most segments9,17,18,19. In this study, we identified 13 fault segments (S1-S13, Fig. 1 and Supplementary Table 1) and developed an iterative method to determine the dip angles for each segment (see Methods and Supplementary Fig. 1). Our initial fault model was constructed with well-constrained strikes and uniform dips of 90°. By jointly inverting teleseismic, strong ground motion, static Global Navigation Satellite System (GNSS), and Interferometric Synthetic Aperture Radar (InSAR) data, we obtained sub-fault moment tensor solutions. For each segment, we calculated the summation of sub-fault moment tensors and then determined the average strike and dip angles, updating the fault model using only the dip angles. The iteration was considered converged when the determined and preset dip angles were close to each other for each segment.
To maintain the point source approximation, we excluded near-fault data within 10 km of the fault traces (Supplementary Figs. 2, 3 and Supplementary Table 2). Given that the fault geometric parameters (i.e., strike and dip) correspond to the zero-frequency source characteristics, the waveform data were filtered in a low-frequency band of 0.01–0.05 Hz, allowing us to overlook some rupture complexities. For both earthquakes, we assumed that ruptures propagated with averaged constant velocities, and that the sub-fault source time functions were isosceles triangles with identical widths (i.e., sub-fault rupture duration). The rupture velocity and triangle width were optimized using grid searches in each iteration.
The inversion converged after eight iterations, during which the differences between the preset and determined dip angles stabilized at ≤ 1° (Fig. 2). Although the iteration was intended to achieve consistency between the preset and inverted dip angles, the data misfit continued to decrease steadily (Fig. 2a), indicating the effectiveness of the designed iteration scheme. The searched averaged constant rupture velocities stabilized at 2.9 km/s and 4.5 km/s (Figs. 1–2), confirming overall subshear and supershear ruptures for the two events, respectively. This is consistent with previous reports9,11,17,20. The sub-fault rupture durations were 11 s and 6 s for the two events, respectively (Fig. 2). These values remained nearly unchanged across different iterations, suggesting robustness in the optimization of these two parameters (Fig. 2).

a Normalized misfit. b Searched sub-fault duration. c Searched average rupture velocities. d Preset and inverted strike angles of each segment. e Preset and inverted dip angles of each segment.
The differences between the initially presumed segment strikes (fault trace directions) and the final inverted ones range from 0-6° (Fig. 2d), indicating small uncertainties in the geometric parameters of all segments. The fault segments from the first event primarily dip to the northwest in the southwest region (S3-S5) and to the southeast in the northeast region (S1-S2, S7, S9), with the exceptions of S6, which dips to the southeast, and S8, which dips to the northwest. All segments (S10-S13) of the second event dip northward with relatively gentle angles. Ultimately, we used the presumed strike and inverted dip angles to construct the final fault model. Due to the small slip amounts of the two branch segments, S9’ and S13’, it is difficult to accurately estimate their focal mechanisms (Supplementary Fig. 4). Based on the locations and mechanisms of the aftershocks21, we set S9’ as a left-lateral strike-slip fault and S13’ as a normal fault, with dip angles of 90° and 50°, respectively.
Finite-fault rupture process
With the established fault model, we performed a joint finite-fault inversion for the earthquake doublet by employing a linear approach proposed by Zhang et al.22, employing the same dataset mentioned above (Supplementary Figs. 5–8 and Supplementary Table 3). In the approach, the sub-fault rupture time windows were determined by the maximum rupture velocity and sub-fault rupture duration. We assumed maximum rupture velocities of 3.5 km/s and 5 km/s, and sub-fault durations of 20 s and 15 s for the two events, respectively. These values are larger than those searched in sub-fault moment tensor inversions (Fig. 2b, c), which helps to capture potential multiple ruptures occurring over a broad time window (We also tested larger rupture velocities of 4.5 km/s and 5.5 km/s, as well as longer durations of 40 s and 20 s, and found that the rupture characteristics remained unchanged, as shown in Fig. 3 and Supplementary Fig. 9). The sub-fault source time functions of the two earthquakes are represented by 39 and 29 triangular functions, respectively. Each triangular has a duration of 1 s and overlaps with its neighboring ones by 0.5 s. The waveform data were filtered to a frequency range of 0.01–0.2 Hz.

a 3-D view of the fault model and source time functions of the earthquake doublet. b Cross section of the fault slips for the second event. The upper colored areas mark the source time functions of each segment. c Same as (b) but for the first event. d Temporal variations in the slip-rate distributions on segments S3-S9 of the first event. The blue blocks denote the rupture delays, two of which are labeled with corresponding local minima in the earthquake source time function. e Same as (d) but for the second event.
The resulted seismic moments of the earthquake doublet were determined to be 8.27 × 1020 Nm and 4.19 × 1020 Nm, corresponding to moment magnitudes of MW7.88 and MW7.68, respectively. Notably, the first event has a longer duration but a weaker peak moment rate (Fig. 3a), aligning with findings from previous studies10,11,17,23. For both events, there is an obvious complementarity between the fault slips and aftershocks (Fig. 3b, c). Compared with the aftershocks, the slip areas with amplitudes exceeding 4 m are situated at shallower depths, with peak slips close to the ground surface. The dominant shallow slip provides support for the reliability of our fault model because in near-fault data inversions, deviations in fault position result in reduced slip near the ground surface.
The earthquake doublet both exhibit remarkable rupture behaviors related to fault segmentation (Fig. 3 and Supplementary Movie 1). In the first event, the rupture propagated for 30 km on segments S1 and S2, reaching the junction between S2 and S7 at approximately 11 s (Fig. 3d and Supplementary Fig. 7). The average rupture velocity was about 2.7 km/s. However, this rupture velocity was relatively poorly constrained due to the weak slips on S1 and S2. Despite this uncertainty, our results, along with previous studies9,10,18,24,25, consistently indicate that the first local minimum in the source time function occurred around 11 s. At this point, the junction between S2 and S7 (Fig. 3d and Supplementary Fig. 7) likely acted as a barrier, halting further rupture propagation. Even when accounting for a 10 km potential error in epicenter location, there should be a subshear rupture on the branch fault (segments S1 and S2). This inference of overall subshear rupture on S1-S2 aligns with the kinematic inversion results18,23 and dynamic simulations26,27, which concluded that the initial splay fault did not experience a sustained supershear rupture. However, we cannot rule out transient supershear on S1 and S228 due to the limited resolution of the inversion.
Due to the geometric barriers, the ruptures didn’t propagate immediately along the major fault after 11 s. Instead, they paused for several seconds before continuing on S8 to the northeast at 15 s and on S6 to the southwest at 21 s. The earlier rupture of S8 compared to S6 can be explained by the dynamic Coulomb failure stress change (ΔCFS). The dynamic ΔCFS on S6, S7, and S8 induced by ruptures of S1 and S2 indicate that the northeastern part of S7 experienced an obvious positive ΔCFS of 1.06 MPa at 11 s. In contrast, the southwestern side of S7 exhibited a smaller ΔCFS (Supplementary Fig. 10a). Segment S6 didn’t rupture until 21 s when its dynamic ΔCFS increased to 2.82 MPa (Supplementary Fig. 10b). This sequence of ruptures to the northeast and southwest aligns with the dynamic rupture simulation26,29.
On segments S8-S9 in the northeast, the ruptures initially propagated at a velocity of 3 km/s, reaching the southwestern end of segment S9 between 24 s and 27 s. However, they were blocked by the geometric discontinuity between S8 and S9 (Fig. 3d) from 27 s to 33 s. This blockage was particularly strong and played a key role in causing the second local minimum in the earthquake source time function between the two largest subevents (Fig. 3d). During this period, the southwestward rupture was also partially impeded, though its impact on moment release was less pronounced compared to the northeastward ruptures. The northeastward ruptures eventually overcame the geometric barrier and resumed propagation at 37 s, at which the dynamic ΔCFS on S9 peaked 2.96 MPa (Supplementary Fig. 10c). This high dynamic ΔCFS may have led to a rupture velocity of 5 km/s on S9, resulting in a barrier-induced supershear. It is worth noting that the rupture stagnation upon reaching S9 and its subsequent rapid propagation are complementary. Together, they result in the average velocity approximately 3 km/s for the northeastern segment between 15 and 48 s (see green arrow and dashed green line in Fig. 3d). Local supershear ruptures on the northeast segments have been also observed in previous studies10,18. However, we are cautious about the persistent large-scale supershear, as this could lead to an average rupture velocity of the first event exceeding the well-constrained value of approximately 3 km/s9,11,17,20. It is more plausible that the coexistence of rupture pauses and rapid propagation occurs, in which geometric barriers played critical roles.
The southwestward ruptures propagated at an average speed of approximately 3 km/s after 21 s, falling within the range of 2.5–3.5 km/s estimated by previous studies9,11,18,30. Similar to Delouis et al. 23, we also found slight velocity variations in the southwestward ruptures, which may suggest the occurrence of local supershear. However, due to the relatively low moment scale and limited propagation distance, it is challenging to constrain these details accurately. In synthetic texts, the slight velocity variations may result from biases introduced by inversion errors (Supplementary Fig. 8).
In the second event, both the western and eastern ruptures propagated with almost sustained super-shear velocities (4.5 km/s to the west and 5 km/s to the east) on segments S12 and S13 (Fig. 3e). However, the eastern ruptures on S11 and S10 became relatively weak after passing through the fault bending between segments S12 and S11, where the strike change exceeded 50° (Fig. 1). Previous studies commonly agree on a supershear rupture to the west and a subshear rupture to the east9,10,17,24,30,31. Since S12 is nearly straight along its entire length, and the regional stress orientation is approximately uniform along the S1232, the rupture speed on the eastern side could be comparable to that on the western side. Given the similar scales of the eastern and western ruptures, a subshear on the eastern side would substantially reduce the average rupture velocity, resulting in a value lower than the well-estimated average rupture velocity of 4.5 km/s (Fig. 1). Moreover, our numerical tests demonstrate a strong ability to constrain both western and eastern rupture velocities (Supplementary Fig. 8). Therefore, we favor that the eastern rupture on S12 is also supershear.
The earthquake doublet suggests varying degrees of supershear ruptures, which are crucial features impacting the source physical processes and the associated hazards33,34. However, the mechanisms leading to the barrier-induced supershear in the first event and persistent supershear in the second event are likely different. It has been found that shear stress and fault smoothness are beneficial for supershear ruptures33,34,35,36,37,38. In the first earthquake, the slip on S8 and the temporary rupture pause between S8 and S9 played a crucial role in stress accumulation on S9 (Supplementary Figs. 10, 11). After supershear was triggered, the high background stress on S9, along with its simple fault geometry, likely facilitated the continued supershear propagation over several tens of kilometers. This may explain why the supershear length is longer than that observed in dynamics simulations35,39. The supershear phenomenon caused by fault bends has been observed in dynamic simulations37,40,41 and real earthquakes42, exhibiting a physical mechanism akin to the “stress accumulation effect.” When a rupture encounters a bend, it experiences a temporary blockage, leading to the accumulation of stress and strain energy in the surrounding medium. Once the barrier is overcome, the accumulated stress can be released more rapidly, resulting in an acceleration of the rupture to a higher speed, potentially exceeding shear velocity. The blockage and subsequent reacceleration of the rupture require specific conditions, including appropriate size and strength of the barrier35,39. While the barrier size between S8 and S9 remains unknown, its strength may correlate to the bend angle to some extent43. Between S8 and S9, the average differences in strike and dip are approximately 14° and 13°, respectively (Fig. 1). However, previous studies mainly concentrated on the bend angle in strike, paying less attention to differences in dip angle37,44,45. With the fault segmentation model and kinematic results and through dynamic inversions, it may be feasible to constrain the equivalent barrier strength, size, and initial stress, as well as other related parameters around the fault bends. On the southwestern segments, our inversion did not reveal any notable large-scale supershear ruptures. This could be due to the lower initial stress40,46,47 or the fault irregularities which hindered the development of supershear to a length detectable by our inversion. The inference of low initial stress is consistent with the results estimated from small earthquake mechanisms32.
For the second event, the triggering effect of the first event, combined with the relatively straightforward fault geometry, likely created favorable conditions for supershear ruptures on segments S12 and S13 (Supplementary Fig. 11). At both western and eastern ends of the fault, where the strikes change notably, the ruptures were completely blocked, preventing the earthquake from developing into a larger scale48.
Source spectra and high-frequency radiations
The rupture decelerations caused by geometric barriers tend to excite high-frequency signals49. We propose a hybrid method for estimating the source spectra and radiated seismic energy in a broad frequency band of 0.01–1 Hz (refer to Methods). The obtained source spectra for the earthquake doublet are depicted in Fig. 4a. Due to the longer rupture fault and source duration, the corner frequency of the first event (fc1) is approximately 0.0062 Hz, which is notably lower than that of the second event (fc2 = 0.0240 Hz). The source spectrum of the first event displays a decay component (n) of only approximately 1.10, less than that of the second event (1.72). The radiated seismic energy of the first earthquake was 9.20 × 1016 J, nearly five times that of the second event (1.90 × 1016 J). To better compare the high-frequency ruptures of the earthquake doublet, we divided the source spectrum of the second smaller event from that of the first larger event, as shown in \({{|S}}_{1}(f)/{S}_{2}(f)|\) (Fig. 4a). Typically, for regular earthquakes, the ratio should exhibit a flat-downward-ramp-flat shape (Fig. 4b). However, an upward slope of \({{|S}}_{1}(f)/{S}_{2}(f)|\) appears at frequencies higher than fc2 (Fig. 4a). To further validate this feature, we also divided the P-wave spectra of the second event from those of the first event at teleseismic stations (refer to Methods). The dividing results of \({{{|U}}_{1}(f)/{U}_{2}(f)|}_{{{{\rm{mean}}}}}\) are highly consistent with those of \({{|S}}_{1}(f)/{S}_{2}(f)|\) (Fig. 4a). The upward slopes above fc2 in both \({{|S}}_{1}(f)/{S}_{2}(f)|\) and \({{{|U}}_{1}(f)/{U}_{2}(f)|}_{{{{\rm{mean}}}}}\) indicate that the first event radiated more high-frequency signals.

a Upper panel: Source spectra from all stations (thin lines), along with the averaged spectra (bold lines) for the first (red) and second (blue) events. Lower panel: Ratio of the source spectra between the earthquake doublet (black) and the average ratio of the observed P-wave spectra (gray). The corner frequencies of the two source spectra are labeled by red and blue dashed lines, respectively. b A sketch diagram illustrating the theoretical source spectrum models. Upper panel: Lines in green and blue are source spectra (S0(f) and S2(f)) with the same decay exponent. Red lines denote the one (S1(f)) with a lower decay exponent, explained as the superposition of the source spectra of small asperities with variable corner frequencies. Lower panel: Ratios of the spectra shown in the upper panel.
The causes of high-frequency radiation are likely different for the two events. For the first earthquake, the back-projection results reveal that the high-frequency radiation mainly clustered around the fault bending regions between S2 and S7, S8 and S9, as well as in the southwest (Fig. 5a)11,30,50, which corresponds well to the geometric barriers that blocked rupture propagation (Fig. 3d, e, Fig. 5a). Around the fault bending areas, the slips are relatively small. This may suggest either rate-strengthening or high fault strength in these regions. Given that stress is more likely to accumulate around fault bends49, we favor the latter explanation. As ruptures propagated across these fault bends, they were blocked, leading to rapid changes in both rupture velocity and slip rate. This blockage did not trigger large-scale ruptures; instead, it caused the ruptures of multiple small-scale asperities due to the heterogeneities in fault strength51,52, generating high-frequency seismic waves49,53. For the second event, the back-projection results exhibit a diminished correlation with geometric changes (Fig. 5a). Its high-frequency radiation may be less related to geometric barriers; instead, they could be generated due to the inhomogeneous distribution of fault strength on segments S12 and S13.

a Comparisons between the finite-fault inversion (low-frequency) and back-projection (high-frequency) results for the earthquake doublet. The along-strike moments of the finite-fault model (squares) are normalized. The circles and diamonds are the back-projection results of the first and second events, respectively30. The light blue circles mark the geometric changes between S2 and S7 and between S8 and S9, where ruptures were blocked and high-frequency signals were radiated (Fig. 2d). b Simple linear slip-weakening model, where the final stress equals the frictional stress. Db is the balanced position. c Undershoot model, where the final stress is greater than the residual stress and the radiated efficiency is greater than that in (b). d Overshoot model, where the final stress is lower than the residual stress and the radiated efficiency is lower than that in (b).
Stress release: undershoot and overshoot
According to the inversion results of the sub-fault moment tensor solutions, finite-fault rupture process, and moment rate spectra, we calculated a series of source parameters for the earthquake doublet (Table 1). These parameters facilitate the examination and analysis of stress release in the two earthquakes.
A notable difference exists in the radiation efficiency ηr between the two events. Based on the generalized and simplified slip-weakening model shown in Fig. 5b54,55,56,57, the lower value of ηr for the second event suggests either a relatively larger fracture energy per unit area on the fault plane EG/Σ or a smaller radiated energy per unit area on the fault plane ER/Σ. By calculating the ratio between the fracture energies of the two events, we obtain
Since the rupture depths of these two earthquakes are almost identical (Fig. 3) and their epicentral locations are not far apart, we assume that they have similar medium parameters (i.e., P-wave velocity, S-wave velocity, and density) around the faults. According to the general slip-weakening model, the dynamic stress drop Δσd is equal to the static stress drop Δσs (Fig. 5b). With this assumption, the ratio of fracture energy between the two events can be predicted using the theory developed by Broberg58,59 and newly verified in experimental observations38:
where \({g}_{{{{\rm{II}}}}}({v}_{{{{\rm{rup}}}}})\) is a universal function describing the effect of the rupture velocity on the energy release for mode II self-similar cracks38,58,59. We used the average rupture velocities searched in sub-fault moment tensor inversions, i.e., \({v}_{{{{\rm{rup}}}},1}\) = 2.9 km/s and \({v}_{{{{\rm{rup}}}},2}\) = 4.5 km/s, and obtained \({g}_{{{{\rm{II}}}},1}({v}_{{{{\rm{rup}}}},1})\) = 0.27 and \({g}_{{{{\rm{II}}}},2}({v}_{{{{\rm{rup}}}},2})\) = 0.16. The different rupture velocities and fault areas largely determine that \({R}_{{{{\rm{G}}}}}^{{{{\rm{pre}}}}}\) had a much lower value than \({R}_{{{{\rm{G}}}}}^{{{{\rm{obs}}}}}\). Notably, even excluding the effect of the rupture velocity and fault area, the \({R}_{{{{\rm{G}}}}}\) value related to only the static stress drop Δσs or average fault slip D is still lower than \({R}_{{{{\rm{G}}}}}^{{{{\rm{obs}}}}}\). For Δσs and D, different studies have explored their relationships with EG/Σ. Most theories posit that their power exponents are positively correlated with EG/Σ, with the maximum exponent of both being 2. However, they cannot achieve this value concurrently since Δσs is proportional to D60,61,62,63,64. With the maximum exponent of 2, the upper bound of \({R}_{{{{\rm{G}}}}}\) was estimated to be \({R}_{{{{\rm{G}}}}}^{\max }\) = \({\left(\frac{{{{{\rm{D}}}}}_{2}}{{{{{\rm{D}}}}}_{1}}\right)}^{2}\) = \(1.62\) or \({R}_{{{{\rm{G}}}}}^{\max }\) = \({\left(\frac{\Delta {{{{\rm{\sigma }}}}}_{{{{\rm{S}}}},2}}{\Delta {{{{\rm{\sigma }}}}}_{{{{\rm{S}}}},1}}\right)}^{2}\) = \(1.70\), both of which are clearly less than \({R}_{{{{\rm{G}}}}}^{{{{\rm{obs}}}}}\)(2.69).
The lower values of \({R}_{{{{\rm{G}}}}}^{{{{\rm{pre}}}}}\) and \({R}_{{{{\rm{G}}}}}^{\max }\) compared with that of \({R}_{{{{\rm{G}}}}}^{{{{\rm{obs}}}}}\) indicate that at least one event was not applicable to the general model (Fig. 5b); that is, the first event was an undershoot event (Fig. 5c), and/or the second event was an overshoot event (Fig. 5d). According to our fault model and rupture model, either the undershoot of the first event or the overshoot of the second event is reasonable. In the first event, geometric barriers blocked the ruptures and prevented continuously distribution of fault slips. These factors are likely to result in insufficient stress release. This incomplete stress release, referred to undershoot, corresponds to a greater ηr. For the second event, the fault segmentation is relatively simple, particularly on segments S12 and S13, where 77% moment of the entire earthquake was released. The simple fault geometries of S12 and S13 were beneficial for supershear ruptures and helped to form a large slip patch with a greater stress drop (Table 1). The large stress drop corresponds well to overshoot and less radiated energy.
The co-seismic stress release of first event is consistent with the mechanisms of its aftershocks and post-earthquake deformation. Through analysis of extensive mechanism solutions and geological observations, the maximum compressive stress direction in the East Anatolian Fault Zone prior to the earthquake doublet was determined to be approximately north-south, with some variations along the strike31,32,46. Although the first event caused a rotation in the principal stress direction near the fault, aftershocks indicate that the post-earthquake stress is similar to the pre-earthquake stress32. This supports our conclusion that the first event was likely an undershoot. Preliminary results from post- earthquake deformation studies also provide additional insights. Xu et al.65 reported that afterslips partially compensated for the co-seismic displacement of the shallow crust. This implies that these small slip areas may not have fully released their stress during the main event.
Conclusions
Based on the sub-fault moment tensor solutions, finite-fault rupture processes, and radiated energy results, the disaster mechanisms of the Türkiye earthquake doublet differ to some extent. In addition to static fault slips, the first event features a longer rupture length, stronger high-frequency radiation, and local barrier-induced supershear ruptures that may lead to a larger disaster area and heighten the earthquake intensity. In the case of the second event, persistent super-shear ruptures, together with the hanging wall effect caused by the gentler dip angle, may largely contribute to earthquake damage.
Fault geometric complexities have long been recognized as major factors that control earthquake rupture processes48,66,67,68. In this work, we found that geometric changes may partially block rupture propagation, resulting in delays and diminished moment release. In some cases, the blocked ruptures can reaccelerate to high speeds even exceeding the shear velocity. Associated with the rupture blockings around geometric changes, small asperities may also rupture, generating more high-frequency signals and radiating more seismic energy. The considerable radiated energy contributes to an overall increase in radiation efficiency, thereby influencing the process of stress release.
Methods
Data processing and Green’s functions
The waveform data used in the sub-fault moment tensor and finite-fault inversions included teleseismic and strong motion recordings. We selected 37 and 42 teleseismic stations at epicentral distances of 30°∼90° for events 1 and 2, respectively (Supplementary Tables 2, 3). P-wave recordings on vertical components were considered. The original velocity seismograms were corrected for instrumental responses and integrated into displacement waves. For the strong motion data, we selected 33 and 24 stations with three components for events 1 and 2, respectively (Supplementary Table 3). The original accelerations were integrated into velocity waveforms. All waveform data were downsampled to 2 samples \({s}^{-1}\).
Coseismic displacements from both the SAR and GNSS data were also considered in the inversions. The subpixel offset tracking method69 was used to map near-field surface deformation with the Sentinel-1 TOPS SAR data in three tracks (e.g., T14, T21, and T123) (Supplementary Table 4). We first performed traditional differential interferometry on the data. The SRTM 30-m DEM data were applied to data processing70. We then estimated the independent deformation at every 64 and 16 pixels in the range and azimuth directions, respectively, using the cross-correlation method69. A search window of 128 × 128 pixels was applied in the estimation. To reduce the effects of noise in the final offset results, a median filter was applied. The range deformation component from the subpixel offsets was selected for modeling. The subpixel deformation in the range retrieved from the amplitude of the SAR data has been proven to match the phase measurements with a residual mean square of 2–3 cm71, but the former can recover deformation much closer to the fault trace. To speed up the modeling processes, the range subpixel offsets were downsampled using the geodetic modeling package PSOKINV72 based on the resolution-based quadtree method73. We finally obtained 6341, 4387, and 2355 pixels for tracks 14, 21, and 123, respectively. The coseismic GNSS displacements were provided by the Nevada Geodetic Laboratory (NGL), and only the near-field ones within 300 km of the fault traces were considered in the inversions (Supplementary Tables 2, 3).
In inversions of this work, the Green’s functions for waveform and static inversions were calculated with QSSP74 and PSGRN75, respectively, based on a crustal model from CRUST1.076 around the epicentral region and a mantle model from the global AK135-FC model77,78. The QSSP programs and the local CRUST1.0 model76 were also used to calculate Green’s functions of the dynamic ΔCFSs.
Fault model construction and sub-fault moment tensor inversion
Based on previous inversion methods that invert seismic waveforms and/or static deformation for sub-fault/multiple-point moment tensor solutions13,16,79,80, we propose a new iterative approach by jointly inverting both waveform and static datasets to construct the fault model. The specific procedures are outlined as follows (Supplementary Fig. 1):
Step 1: Initial fault model construction
Based on active faults81, relocated aftershocks50, surface rupture locations82, and surface deformation data measured from the SAR data, we distinguished the fault traces comprising 10 and 5 segments for the first and second events, respectively (Fig. 1). We excluded two minor branch segments, S9’ and S13’, because numerical tests revealed that their parameters were difficult to be well constrained (Supplementary Fig. 4). We assumed dip angles of 90° for the remaining fault segments (S1-S13) and constructed the initial fault model.
Step 2: Joint inversion for the sub-fault moment tensor
We discretized all 13 segments into small rectangular sub-faults, each with a constant length of 4 km and a width increasing with depth from 2 km to 8 km. By approximating each sub-fault as a point source, the displacement waves observed on the n-th component at the k-th station \({u}_{n}^{k}(t)\) can be expressed as22,83:
where \({\dot{M}}_{{pq}}^{l}\)(t) is the moment rate history and \({g}_{{np},q}^{{kl}\,}\left(t\right)\) is the Green’s function, which denotes the seismic wave at the k-th station caused by a unit couple (\(p,q\)) at the l-th sub-fault with a Heaviside source time function. A pure deviatoric moment tensor whose elements share the same time history can be represented by a linear combination of five elementary double-couple sources84:
where \({\mu }_{l}\) is the shear modulus, \({A}_{l}\) is the sub-fault area, \({s}_{l}\left(t\right)\) is an area-normalized source time function (\({\int }_{0}^{T}{s}_{l}(t){dt}=1\), where T is the source duration), and \({m}_{h}^{l}\) is the weight coefficient to be determined. By substituting (4) into (3), we obtain the following:
When \({t}\to \infty ,\) \({s}_{l}(t)\) can be regarded as a Dirac-delta function, Eq. (5) simplifies to a static inversion equation as follows:
where \({u}_{n}^{k,{{{\rm{static}}}}}\) is the observed static displacement and \({g}_{{nh}}^{{kl},\,{{{\rm{static}}}}}\) is the surface deformation caused by a unit sub-fault dislocation.
In waveform inversions, we assume that \({s}_{l}(t)\) is an isosceles triangle with a uniform width for all sub-faults, with its initial time controlled by the rupture velocity. Once the width of \({s}_{l}(t)\) and the average rupture velocity are preset or resolved, we can combine (5) and (6) and obtain the equation of joint inversion with both waveform and deformation data:
where D is the spatial and temporal smoothing matrix, \({w}_{1}\) and \({w}_{2}\) represent the weights of the data, and [m] represents the unknown consisting of sub-fault weight coefficients \({m}_{h}^{l}\). By solving Eq. (7) and determining \({m}_{h}^{l}\), we can derive the sub-fault moment tensor solutions \({\dot{{{{\boldsymbol{M}}}}}}^{l}\left(t\right)\) using Eq. (4). Subsequently, we can obtain the average strikes and dips of each segment.
Step 3: Fault model update
We renewed the fault model by using the calculated average dip angles of each segment. We repeated step 2 until the maximum difference in dip angles between the old and new fault models was less than 1° over three consecutive iterations.
Dynamic and static Coulomb Failure Stress change (ΔCFS)
We constructed a database of dynamic stress Green’s functions using the QSSP program74, based on the local CRUST1.0 model76. This database contains 6-component dynamic stress Green’s functions with various parameters, including the mechanisms of the sources, the distances between the sources and receivers, and the depths of both sources and receivers. In calculation of each dynamic Coulomb failure stress change (ΔCFS), we extracted the relevant stress Green’s functions from the database, and convolved them with the moment-rate function of the source sub-fault. The changes in normal stress (Δσn, positive when unclamped) and shear stress (Δτ, positive in slip direction) were then obtained by projecting the stress Green’s functions onto the plane of the receiver sub-fault. The dynamic Coulomb failure stress change was calculated using85,86
where the effective friction coefficient, μ′, was assumed to be 0.4.
The database of static stress Green’s functions was built using the EDGRN/EDCMP program87, also based on the local CRUST1.0 model76. The calculation process for the static ΔCFS was the same with that of the dynamic ones.
Source spectrum
With the teleseismic P waves used in finite-fault inversions, we estimated the source spectra at low and high frequencies. The low-frequency (0.01–0.3 Hz) source spectra \({S}_{{{{\rm{L}}}}}\left(f\right)\) were obtained by deconvolving the calculated Green’s functions from observations, while the high-frequency (0.1–1 Hz) source spectra \({S}_{{{{\rm{H}}}}}\left(f\right)\) were determined using the velocity integral method based on a frequency-dependent attenuation model88. The frequency segmentation point was set at 0.2 Hz, at which the equivalent time t* of the AK135-FC model77,78 and the frequency-dependent attenuation model89,90 is equal. The complete source spectra \(S(f)\) were obtained through a weighted superposition of \({S}_{{{{\rm{L}}}}}\left(f\right)\) and \({S}_{{{{\rm{H}}}}}\left(f\right)\):
In the low-frequency part, we employed the iterative projected Landweber method for deconvolution91. During each iteration of the deconvolution, limitations such as causality, finite length of the source time function (85 s and 35 s for the first and second events, respectively), and a maximum frequency of 0.3 Hz were applied to \({S}_{{{{\rm{L}}}}}\left(t\right)\). The iteration continued until the seismic moment of \({S}_{{{{\rm{L}}}}}\left(t\right)\) stabilized. Stations with normalized misfits greater than 0.6 in the first event and greater than 0.5 in the second event were excluded.
In the high-frequency portion, we assumed complete incoherence between depth phases and direct P-waves to correct the energy of the depth phases88. During this correction, we considered the different radiation patterns, geometric spreading factors, and reflection and refraction coefficients along the ray paths of depth phases and direct P-waves.
Radiated seismic energy
The radiated energy was calculated with the source spectra \(S(f)\)92,93,94 and then corrected for the effects of rupture directivity94 based on our finite-fault model. The radiated energy determined at various stations was normally distributed in the logarithmic domain. We selected the geometric mean as the final value by weighting each energy result with the area of the spherical Voronoi polygon where the station is located.
P-wave spectra ratios
For teleseismic P-wave spectra of two adjacent earthquakes \({U}_{1}\left(f\right)\) and \({U}_{2}\left(f\right)\) at a certain station, we have the following:
where \(I(\,f)\) is the instrumental response and k is a scalar. Because \(|{g}_{1}(\,f)|\) and \(|{g}_{2}(\,f)|\) have almost identical path effects and attenuations, the dividing result \(|\frac{{U}_{1}(\,f)}{{U}_{2}(\,f)}|\) is proportional to that of the source spectrum \(|\frac{{S}_{1}(\,f)}{{S}_{2}(\,f)}|\). Hence, the average \(|\frac{{U}_{1}(\,f)}{{U}_{2}(\,f)}|\) at all stations should show similar shapes to \(|\frac{{S}_{1}(\,f)}{{S}_{2}(\,f)}|\) if the source spectra are well determined.
Other macroscopic source parameters
When determining the corner frequency and the spectral decay coefficient, we used a simple piecewise power-law decay model to fit the estimated source spectrum as follows:
We performed grid searches for the corner frequency fc in the range of 0.01–1 Hz and for the spectral decay coefficient n in the range of 1.0–3.0.
According to Noda et al. 54, and using the method described in Ripperger and Mai95, we calculated the stress drop distribution on the fault and obtained the slip-weighted average (Δσs). Since the apparent stress drop (Δσa) equals the shear modulus (μ) times the energy moment ratio (ẽ), the radiation efficiency can be obtained with Δσs and Δσa96,97,98 as follows:
where \({E}_{{{{\rm{R}}}}}\) and \({E}_{{{{\rm{G}}}}}\) are the radiated and fracture energies, respectively, and Σ is the fault area.
Data availability
The teleseismic data were obtained from the Global Seismic Network (GSN) and the Federation of Digital Seismic Networks (FDSN) on the Incorporated Research Institutions for Seismology (IRIS) website (http://www.iris.edu/wilber3/find_event). The strong-motion data were provided by the Disaster and Emergency Management Presidency of Türkiye (AFAD) (https://en.afad.gov.tr/). The SAR data were downloaded from the Copernicus Data Space Ecosystem (https://dataspace.copernicus.eu/). The coseismic GNSS offsets were obtained from the Nevada Geodetic Laboratory (NGL) (http://geodesy.unr.edu/). The results determined in this work, including the sub-fault moment tensor solutions, the finite-fault rupture model, and the apparent source spectra, are uploaded to Figshare repository (https://doi.org/10.6084/M9.FIGSHARE.27991634.V1)99.
Code availability
The major codes used in this study, i.e., the finite-fault inversion program and the geodetic modeling package PSOKINV, are available on the Figshare repository (https://doi.org/10.6084/M9.FIGSHARE.28007207.V1)100. Other codes can be available on request from the corresponding author.
References
Lay, T. & Kanamori, H. Earthquake doublets in the Solomon Islands. Phys. Earth Planet. Inter. 21, 283–304 (1980).
Das, S. & Scholz, C. H. Theory of time‐dependent rupture in the Earth. J. Geophys. Res. 86, 6039–6051 (1981).
Stein, R. S. The role of stress transfer in earthquake occurrence. Nature 402, 605–609 (1999).
King, G. C. P. & Cocco, M. Fault interaction by elastic stress changes: New clues from earthquake sequences. in Advances in Geophysics 44 1–VIII (Elsevier, 2001).
Kagan, Y. Y. & Jackson, D. D. Worldwide doublets of large shallow earthquakes. Bull. Seismol. Soc. Am. 89, 1147–1155 (1999).
Felzer, K. R. A Common Origin for Aftershocks, Foreshocks, and Multiplets. Bull. Seismol. Soc. Am. 94, 88–98 (2004).
Massin, F., Farrell, J. & Smith, R. B. Repeating earthquakes in the Yellowstone volcanic field: Implications for rupture dynamics, ground deformation, and migration in earthquake swarms. J. Volcanol. Geotherm. Res. 257, 159–173 (2013).
Dal Zilio, L. & Ampuero, J.-P. Earthquake doublet in Turkey and Syria. Commun. Earth Environ. 4, 71 (2023).
Jia, Z. et al. The complex dynamics of the 2023 Kahramanmaraş, Turkey, MW 7.8-7.7 earthquake doublet. Science 381, 985–990 (2023).
Ren, C. et al. Supershear triggering and cascading fault ruptures of the 2023 Kahramanmaraş, Türkiye, earthquake doublet. Science 383, 305–311 (2024).
Xu, L. et al. The overall-subshear and multi-segment rupture of the 2023 MW 7.8 Kahramanmaraş, Turkey earthquake in millennia supercycle. Commun. Earth Environ. 4, 379 (2023).
Ni, S. et al. Complexities of the Turkey-Syria doublet earthquake sequence. Innovation 4, 100431 (2023).
Zhang, Y. et al. Significant lateral dip changes may have limited the scale of the 2015 MW 7.8 Gorkha earthquake: Dip Variation of the Gorkha Earthquake. Geophys. Res. Lett. 44, 8847–8856 (2017).
Okuwaki, R. & Yagi, Y. Role of geometric barriers in irregular-rupture evolution during the 2008 Wenchuan earthquake. Geophys. J. Int. 212, 1657–1664 (2018).
Zhang, L., Liu, Y., Li, D., Yu, H. & He, C. Geometric control on seismic rupture and earthquake sequence along the Yingxiu‐Beichuan fault with implications for the 2008 Wenchuan earthquake. J. Geophys. Res.: Solid Earth 127, e2022JB024113 (2022).
Xu, Y., Zhang, Y. & Xu, L. Geometry-dependent rupture process of the 2015 Gorkha, Nepal, earthquake determined using a dip-varying inversion approach with teleseismic, high-rate GPS, static GPS and InSAR data. Geophys. J. Int. 229, 1408–1421 (2022).
Melgar, D. et al. Sub- and super-shear ruptures during the 2023 MW 7.8 and MW 7.6 earthquake doublet in SE Türkiye. Seismica 2, https://doi.org/10.26443/seismica.v2i3.387 (2023).
Liu, C. et al. Complex multi-fault rupture and triggering during the 2023 earthquake doublet in southeastern Türkiye. Nat. Commun. 14, 5564 (2023).
Okuwaki, R., Yagi, Y., Taymaz, T. & Hicks, S. P. Multi‐Scale rupture growth with alternating directions in a complex fault network during the 2023 south‐eastern Türkiye and Syria earthquake doublet. Geophys. Res. Lett. 50, e2023GL103480 (2023).
Yao, S. & Yang, H. Direct rupture speed estimation from ‘rupture phase’ of the 2023 Turkey MW 7.8 earthquake. In EGU23-17632 (EGU23, 2023).
Barbot, S. et al. Slip distribution of the February 6, 2023 MW 7.8 and MW 7.6, Kahramanmaraş, Turkey earthquake sequence in the East Anatolian Fault Zone. Seismica 2, https://doi.org/10.26443/seismica.v2i3.502 (2023).
Zhang, Y. et al. The 2009 L’Aquila MW 6.3 earthquake: A new technique to locate the hypocentre in the joint inversion of earthquake rupture process. Geophys. J. Int. 191, 1417–1426 (2012).
Delouis, B., Van Den Ende, M. & Ampuero, J.-P. Kinematic rupture model of the 6 february 2023 MW 7.8 Türkiye earthquake from a large set of near-source strong-motion records combined with GNSS offsets reveals intermittent supershear rupture. Bull. Seismol. Soc. America. 114, 726–740 (2023).
Zhang, Y. et al. Geometric controls on cascading rupture of the 2023 Kahramanmaraş earthquake doublet. Nat. Geosci. 16, 1054–1060 (2023).
Mai, P. M. et al. The Destructive Earthquake Doublet of 6 February 2023 in South-Central Türkiye and Northwestern Syria: Initial Observations and Analyses. Seismic Rec. 3, 105–115 (2023).
Wang, Z. et al. Dynamic Rupture Process of the 2023 MW 7.8 Kahramanmaraş Earthquake (SE Türkiye): Variable Rupture Speed and Implications for Seismic Hazard. Geophys. Res. Lett. 50, e2023GL104787 (2023).
He, L. et al. Coseismic kinematics of the 2023 Kahramanmaras, Turkey earthquake sequence from InSAR and optical data. Geophys. Res. Lett. 50, e2023GL104693 (2023).
Abdelmeguid, M. et al. Dynamics of episodic supershear in the 2023 M7.8 Kahramanmaraş/Pazarcik earthquake, revealed by near-field records and computational modeling. Commun. Earth Environ. 4, 456 (2023).
Ding, X. et al. The sharp turn: Backward rupture branching during the 2023 MW 7.8 Kahramanmaraş (Türkiye) earthquake. Seismica 2, https://doi.org/10.26443/seismica.v2i3.1083 (2023).
Cao, B. & Ge, Z. Cascading multi-segment rupture process of the 2023 Turkish earthquake doublet on a complex fault system revealed by tele-seismic P-wave back-projection method. Earthq. Sci. 37, 1–16 (2024).
Gabriel, A.-A., Ulrich, T., Marchandon, M., Biemiller, J. & Rekoske, J. 3D Dynamic Rupture Modeling of the 6 February 2023, Kahramanmaraş, Turkey MW 7.8 and 7.7 Earthquake Doublet Using Early Observations. Seismic Rec. 3, 342–356 (2023).
Yoshida, K. Spatial variation in stress orientation in and around Türkiye: rupture propagation across the stress regime transition in the 2023 Mw 7.8 Kahramanmaraş earthquake. Geophys. J. Int. 238, 1582–1594 (2024).
Das, S. The Need to Study Speed. Science 317, 905–906 (2007).
Bouchon, M. et al. Faulting characteristics of supershear earthquakes. Tectonophysics 493, 244–253 (2010).
Weng, H., Huang, J. & Yang, H. Barrier‐induced supershear ruptures on a slip‐weakening fault. Geophys. Res. Lett. 42, 4824–4832 (2015).
Bao, H. et al. Early and persistent supershear rupture of the 2018 magnitude 7.5 Palu earthquake. Nat. Geosci. 12, 200–205 (2019).
Zheng, L., Qian, F. & Zhang, H. The transition conditions of supershear rupture propagation on fault-bend systems. Chin. J. Geophys. 64, 182–194 (2021).
Dong, P., Xia, K., Xu, Y., Elsworth, D. & Ampuero, J.-P. Laboratory earthquakes decipher control and stability of rupture speeds. Nat. Commun. 14, 2427 (2023).
Dunham, E. M., Favreau, P. & Carlson, J. A supershear transition mechanism for cracks. Science 299, 1557–1559 (2003).
Bruhat, L., Fang, Z. & Dunham, E. M. Rupture complexity and the supershear transition on rough faults. J. Geophys. Res.: Solid Earth 121, 210–224 (2016).
Qian, F., Wu, B., Feng, X. & Zhang, H. 3D numerical simulation of dynamic ruptures on complex fault systems by BIEM with unstructured meshes. Chin. J. Geophys. 62, 3421–3431 (2019).
Okuwaki, R., Hirano, S., Yagi, Y. & Shimizu, K. Inchworm-like source evolution through a geometrically complex fault fueled persistent supershear rupture during the 2018 Palu Indonesia earthquake. Earth Planet. Sci. Lett. 547, 116449 (2020).
Zhang, H. & Chen, X. Dynamic rupture process of the 1999 chi-chi, taiwan, earthquake. Earthq. Sci. 22, 3–12 (2009).
Xu, J., Zhang, H. & Chen, X. Rupture phase diagrams for a planar fault in 3-D full-space and half-space. Geophys. J. Int. 202, 2194–2206 (2015).
Aochi, H., Fukuyama, E. & Matsu’ura, M. Spontaneous rupture propagation on a non-planar fault in 3-D elastic medium. Pure Appl. Geophys. 157, 2003–2027 (2000).
Güvercin, S. E., Karabulut, H., Konca, A. Ö., Doğan, U. & Ergintav, S. Active seismotectonics of the East Anatolian Fault. Geophys. J. Int. 230, 50–69 (2022).
He, Z., Zhang, Z., Wang, Z. & Wang, W. Slip-weakening distance and energy partitioning estimated from near-fault recordings during the 2023 MW 7.8 Türkiye-Syria earthquake. Tectonophysics 885, 230424 (2024).
Elliott, A. J., Oskin, M. E., Liu‐Zeng, J. & Shao, Y. Rupture termination at restraining bends: The last great earthquake on the Altyn Tagh fault. Geophys. Res. Lett. 42, 2164–2170 (2015).
Madariaga, R. High-frequency radiation from crack (stress drop) models of earthquake faulting. Geophys. J. Int. 51, 625–651 (1977).
Ding, H. et al. High-Resolution seismicity imaging and early aftershock migration of the 2023 Kahramanmaraş (SE Türkiye) MW 7.9 & 7.8 earthquake doublet. Earthq. Sci. 36, 1–16 (2023).
Das, S. & Aki, K. Fault plane with barriers: A versatile earthquake model. J. Geophys. Res. 82, 5658–5670 (1977).
Lay, T. & Kanamori, H. An asperity model of great earthquake sequencies. Earthquake Prediction; an International Review 579–592 (1981).
Madariaga, R., Ampuero, J. P. & Adda-Bedia, M. Seismic radiation from simple models of earthquakes. in Geophysical Monograph Series (eds. Abercrombie, R., McGarr, A., Kanamori, H. & Di Toro, G.) 170 223–236 (American Geophysical Union, Washington, D. C., 2006).
Noda, H., Lapusta, N. & Kanamori, H. Comparison of average stress drop measures for ruptures with heterogeneous stress change and implications for earthquake physics. Geophys. J. Int. 193, 1691–1712 (2013).
Li, V. C. Mechanics of shear rupture applied to earthquake zones. In Fracture Mechanics of Rock. 351–428 (Elsevier, 1987).
Rivera, L. & Kanamori, H. Representations of the radiated energy in earthquakes. Geophys. J. Int. 162, 148–155 (2005).
Ide, S. Estimation of radiated energy of finite-source earthquake models. Bull. Seismological Soc. Am. 92, 2994–3005 (2002).
Broberg, K. B. Intersonic Bilateral Slip. Geophys. J. Int. 119, 706–714 (1994).
Broberg, K. B. Cracks and Fracture. (Elsevier, 1999).
McGarr, A. Attempting to bridge the gap between laboratory and seismic estimates of fracture energy. Geophys. Res. Lett. 31, L14606 (2004).
Rice, J. R., Sammis, C. G. & Parsons, R. Off-fault secondary failure induced by a dynamic slip pulse. Bull. Seismological Soc. Am. 95, 109–134 (2005).
Abercrombie, R. E. & Rice, J. R. Can observations of earthquake scaling constrain slip weakening? Geophys. J. Int. 162, 406–424 (2005).
Chambon, G., Schmittbuhl, J. & Corfdir, A. Frictional response of a thick gouge sample: 2. Friction law and implications for faults. J. Geophys. Res. 111, B09309 (2006).
Bizzarri, A. On the relations between fracture energy and physical observables in dynamic earthquake models. J. Geophys. Res. 115, B10307 (2010).
Xu, L. et al. The 2023 MW 7.8 and 7.6 Earthquake Doublet in Southeast Türkiye: Coseismic and Early Postseismic Deformation, Faulting Model, and Potential Seismic Hazard. Seismological Res. Lett. 95, 562–573 (2024).
Wesnousky, S. G. Predicting the endpoints of earthquake ruptures. Nature 444, 358–360 (2006).
Biasi, G. P. & Wesnousky, S. G. Bends and ends of surface ruptures. Bull. Seismological Soc. Am. 107, 2543–2560 (2017).
Howarth, J. D. et al. Spatiotemporal clustering of great earthquakes on a transform fault controlled by geometry. Nat. Geosci. 14, 314–320 (2021).
Michel, R., Avouac, J. & Taboury, J. Measuring near field coseismic displacements from SAR images: Application to the Landers earthquake. Geophys. Res. Lett. 26, 3017–3020 (1999).
Farr, T. G. et al. The shuttle radar topography mission. Rev. Geophys. 45, 2005RG000183 (2007).
Feng, W. et al. Orthogonal fault rupture and rapid postseismic deformation following 2019 Ridgecrest, California, earthquake sequence revealed from geodetic observations. Geophys. Res. Lett. 47, e2019GL086888 (2020).
Feng, W. et al. The 2011 MW 6.8 Burma earthquake: Fault constraints provided by multiple SAR techniques. Geophys. J. Int. 195, 650–660 (2013).
Lohman, R. B. & Simons, M. Some thoughts on the use of InSAR data to constrain models of surface deformation: Noise structure and data downsampling. Geochem., Geophys., Geosyst. 6, 2004GC000841 (2005).
Wang, R., Heimann, S., Zhang, Y., Wang, H. & Dahm, T. Complete synthetic seismograms based on a spherical self-gravitating Earth model with an atmosphere–ocean–mantle–core structure. Geophys. J. Int. 210, 1739–1764 (2017).
Wang, R., Lorenzo-Martín, F. & Roth, F. PSGRN/PSCMP—a new code for calculating co-and post-seismic deformation, geoid and gravity changes based on the viscoelastic-gravitational dislocation theory. Computers Geosci. 32, 527–541 (2006).
Laske, G., Masters, G., Ma, Z. & Pasyanos, M. Update on CRUST1. 0—A 1-degree global model of Earth’s crust. in 15 2658 (2013).
Montagner, J.-P. & Kennett, B. L. N. How to reconcile body-wave and normal-mode reference earth models. Geophys. J. Int. 125, 229–248 (1996).
Kennett, B. L., Engdahl, E. R. & Buland, R. Constraints on seismic velocities in the Earth from traveltimes. Geophys. J. Int. 122, 108–124 (1995).
Zhang, Y., Feng, W., Xu, L., Zhou, C. & Chen, Y. Spatio-temporal rupture process of the 2008 great Wenchuan earthquake. Sci. China Ser. D: Earth Sci. 52, 145–154 (2009).
Zhang, Y., Wang, R. & Chen, Y. Stability of rapid finite‐fault inversion for the 2014 MW 6.1 South Napa earthquake. Geophys. Res. Lett. 42, 10,263–10,272 (2015).
Emre, Ö. et al. Active fault database of Turkey. Bull. Earthq. Eng. 16, 3229–3275 (2018).
Karabacak, V. et al. The 2023 Pazarcık (Kahramanmaraş, Türkiye) earthquake (MW 7.7): implications for surface rupture dynamics along the East Anatolian Fault Zone. JGS 180, jgs2023-020 (2023).
Aki, K. & Richards, P. G. Quantitative Seismology. (University Science Books, Mill Valley, California New York, 2002).
Kikuchi, M. & Kanamori, H. Inversion of complex body waves—III. Bull. Seismological Soc. Am. 81, 2335–2350 (1991).
Toda, S. & Stein, R. S. Long‐and short‐term stress interaction of the 2019 Ridgecrest sequence and Coulomb‐based earthquake forecasts. Bull. Seismological Soc. Am. 110, 1765–1780 (2020).
King, G. C., Stein, R. S. & Lin, J. Static stress changes and the triggering of earthquakes. Bull. Seismological Soc. Am. 84, 935–953 (1994).
Wang, R. Computation of deformation induced by earthquakes in a multi-layered elastic crust—FORTRAN programs EDGRN/EDCMP. Computers Geosci. 29, 195–207 (2003).
Boatwright, J. & Choy, G. L. Teleseismic estimates of the energy radiated by shallow earthquakes. J. Geophys. Res. 91, 2095–2112 (1986).
Newman, A. V. & Okal, E. A. Teleseismic estimates of radiated seismic energy: The E/M0 discriminant for tsunami earthquakes. J. Geophys. Res.: Solid Earth 103, 26885–26898 (1998).
Convers, J. A. & Newman, A. V. Global evaluation of large earthquake energy from 1997 through mid-2010. J. Geophys. Res. 116, B08304 (2011).
Bertero, M. et al. Application of the projected Landweber method to the estimation of the source time function in seismology. Inverse Probl. 13, 465 (1997).
Haskell, N. A. Total energy and energy spectral density of elastic wave radiation from propagating faults. Bull. Seismol. Soc. Am. 54, 1811–1841 (1964).
Rudnicki, J. W. & Freund, L. B. On energy radiation from seismic sources. Bull. Seismological Soc. Am. 71, 583–595 (1981).
Venkataraman, A. & Kanamori, H. Effect of directivity on estimates of radiated seismic energy. J. Geophys. Res.: Solid Earth 109, B04301 (2004).
Ripperger, J. & Mai, P. M. Fast computation of static stress changes on 2D faults from final slip distributions. Geophys. Res. Lett. 31, 2004GL020594 (2004).
Kanamori, H. & Rivera, L. Energy partitioning during an earthquake. in (American Geophysical Union, 2006).
Venkataraman, A. & Kanamori, H. Observational constraints on the fracture energy of subduction zone earthquakes. J. Geophys. Res. 109, 2003JB002549 (2004).
Cocco, M. et al. Fracture energy and breakdown work during earthquakes. Annu. Rev. Earth Planet. Sci. 51, 217–252 (2023).
Zhou, J. Source data for graphs and charts in article ‘Geometric barriers impacted rupture processes and stress releases of the 2023 Kahramanmaraş, Türkiye, earthquake doublet’. 4067691 Bytes figshare https://doi.org/10.6084/M9.FIGSHARE.27991634.V1 (2024).
Zhou, J., Xu, Y., Zhang, Y. & Feng, W. Source codes used in article ‘Geometric barriers impacted rupture processes and stress releases of the 2023 Kahramanmaraş, Türkiye, earthquake doublet’. 461635634 Bytes figshare https://doi.org/10.6084/M9.FIGSHARE.28007207.V1 (2024).
Ye, L., Kanamori, H. & Lay, T. Global variations of large megathrust earthquake rupture characteristics. Sci. Adv. 4, eaao4915 (2018).
Wessel, P. et al. The generic mapping tools version 6. Geochem. Geophys. Geosyst. 20, 5556–5564 (2019).
Acknowledgements
This work was supported by the National Natural Science Foundation of China (42021003 and 42074058) and the High-performance Computing Platform of Peking University. Tuncay Taymaz thanks to Istanbul Technical University-Research Fund (ITU-BAP) and the Alexander von Humboldt Foundation Research Fellowship Award for providing computing facilities through Humboldt-Stiftung Follow-Up Program. Tuncay Taymaz also appreciates Dr. Beyza Taymaz for her phenomenal support and assistance during hectic days dealing with global media requests and organizing international scientific collaborations and for her guidance and discussions during the sleepless nights. The authors thank to Dr. Peng Dong and Prof. Kaiwen Xia for their assistance in the calculation of fracture energy, and Dr. Mohamed Abdelmeguid and two anonymous reviewers for their constructive comments. The authors also thank the editors, Dr. Joe Aslin and Dr. Sylvain Barbot, as well as the Communications Earth & Environment staff, for their support throughout the evaluation of this work.
Author information
Authors and Affiliations
Contributions
Yong Zhang conceived and led this work. Jiangcheng Zhou measured the radiated energy and contributed to the stress release models. Yueyi Xu performed the sub-fault moment tensor and finite-fault inversions. Wanpeng Feng processed the SAR data. Yong Zhang, Jiangcheng Zhou, Yueyi Xu and Wanpeng Feng drafted the manuscript. Tuncay Taymaz contributed to tectonic interpretation of the active tectonics of the Eastern Anatolia, Türkiye, and manuscript editing throughout. Yun-Tai Chen, Chenyu Xu, Beibei Xu, Rongjiang Wang, Fuqiang Shi, Zhigang Shao, Qinghua Huang participated in the interpretation and the scientific discussion.
Corresponding author
Ethics declarations
Competing interests
The authors declare no competing interests.
Peer review
Peer review information
Communications Earth & Environment thanks Mohamed Abdelmeguid and the other, anonymous, reviewer(s) for their contribution to the peer review of this work. Primary Handling Editors: Sylvain Barbot and Joe Aslin. A peer review file is available
Additional information
Publisher’s note Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution-NonCommercial-NoDerivatives 4.0 International License, which permits any non-commercial use, sharing, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if you modified the licensed material. You do not have permission under this licence to share adapted material derived from this article or parts of it. The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by-nc-nd/4.0/.
About this article

Cite this article
Zhou, J., Xu, Y., Zhang, Y. et al. Geometric barriers impacted rupture processes and stress releases of the 2023 Kahramanmaraş, Türkiye, earthquake doublet. Commun Earth Environ 6, 56 (2025). https://doi.org/10.1038/s43247-025-02004-x
Received:
Accepted:
Published:
Version of record:
DOI: https://doi.org/10.1038/s43247-025-02004-x
This article is cited by
-
Slip complementarity and deficit of the East Anatolian Fault revealed by geodetic observations
Communications Earth & Environment (2025)
-
Source and rupture properties of the 23 April 2025 Mw 6.3 Silivri High-Kumburgaz basin earthquake threatening İstanbul, NW Türkiye
Journal of Seismology (2025)
